基于NIOSⅡ的伺服控制器设计
基于NiosⅡ软核的LCD控制器的设计
FG P A采 用 A tr— yl e 列 的 E 1 6器 件 , l aC co 系 e n P C
mi g c d sg v n. T ss se h st e a v n a e fef cie a d fe i l e in,e s mp a tto nd q i k n o e wa i e hi y t m a h d a t g so fe tv n xb e d sg l a y i l n ain a u c
s fwa e d sg e h i u o r aie lq i r sa ip a o to y me n fS ot r e in tc n q e t e lz i u d c y t lds l y c n r lb a s o OPC,wih KS 01 8 一L t 0 CD e i n d sg
控 制 系统 的软硬 件 设计 方 法 , 出 了部 分 程 序代 码 。 系统 具 有 设 计 方 法 灵 活 高 效、 给 可移 植 性 强 、 便 于扩展 等优 势 。 [ 关键 词 ] NoI;S P i I O C技 术 ;现场 可 编程 门阵列 ; S0 0 ;液 晶显 示 器控 制 s K 18
21 0 0年 1 2月
北京联合大学学报 ( 自然 科 学 版 )
J un l f e igU inU ie i ( aua S i c s o r a o in no nv r t N trl c n e ) B j sy e
De . 2 0 c 01
Vo . 4 NO 4 Su No 8 1 2 . m . 2
ZHU . a Yid n
基于双NIOSⅡ核FPGA励磁控制系统的研究与设计
l ; l i l
/
展 规律相 同。 随着 微 电子 技术 的发展 , 磁控 制系统 励
O 引 言
励 磁控 制 系 统 是 同步 发 电机 的重 要组 成 部分 , 它直 接影 响发 电机 的运行 特性 ,对 电力 系统 的安全 稳 定有 着重 要影 响 。维持 发 电机 机端 电压 是励磁 控 制系统 的最基 本 作用 : 常 当发 电机 带负荷 时 , 端 通 机
而发 电机的无功功率则与励磁有关 , 以分配各发电 所 机的无功功率是励磁控制系统的重要功能之一。 发电 机稳 态 运行 时 。 产生 很小 的扰 动后 , 磁 系统 能使 在 励
发 电机继 续运 行在 稳 态 ; 电机 机端 负载 突然短路 、 发 断路 时 , 磁 系统能迅 速做 出响应 l 励 】 l 。 励磁控 制系统对 控制精度 、 响应速 度及控 制复杂 性 等 都 有 很 高 的 要 求 。 随 着 S P (ytm O O C Ss ia e l
上, 以模糊 自 调节PD I控制算法为控制核心。与传统 的励 磁 控制 系 统 大 多采 用 1位 、2 处 理 核 心结 合 6 3位
系统设计无疑是未来 的趋势 。
式, 这也使得选用F G 实现复杂控制成为更好的选 PA 择 lJ 文 介 绍基 于 双N O I F G 励 磁 控 制 系 2。本 . 3 I SI P A 核
统 的研 究与 设计 。
1 励 磁 系统 国 内外 现 状
励磁 控制 系统 的硬 件核 心与 一般控 制 电路 的发
统, 这使得励 磁控制系统 的硬件运算基础得 到保证 。 励 磁控 制 系统 的软件 核心 是励 磁控 制算法 。随 着 控 制理论 的发 展 ,控制 方式从 早期 的单 变量 反馈 发 展 到后来 的 多变量 反馈 ,由线性 控制 发展 到非线 性 控 制 , 至 当今 出现 的大规模 智 能化控 制 。 磁 控 直 励 制 算法 的发 展 与之一 致 , 经历 的主要 阶段有 : 于 其 基 经 典 PD 节 的单 变 量 电压 调 节器 A R.I + R: I调 V PD AV 基 于 经典 PD I 调节 的多 变量 A R,附 带 电力 系统 稳 V 定PS S 附加 控制 ,I A R+ S ; 于现 代控 制理 论 PD+ V P S 基
基于NiosⅡ的UART设计与实现

c n r d i tr u h te s ra ot e u gn ot a e o f me o g e l r d b g i gs f r . i th h i p w
Ke r s ART;N o y wo d :U isI;I—u lu ;RS 3 l P n ce s 2 2;F GA;S C P OP
中 图分 类 号 : P 3 T 32
பைடு நூலகம்
文献标识码 : A
文章 编 号 : 6 4 6 3 ( 0 2 1 — 1 6 0 1 7 — 2 6 2 1 )7 0 6 — 3
De i n n r a i a i n o sg a d e lz to fUART y t m a e o o s s e b s d n Ni sI I
W AN Yi i g .W ANG i i n G — n p Da- a g , q
( . ih u 妇e 1 Guz o
,Guy n 5 0 5,C ia; ia g5 0 2 hn
2 P ol A m dC l g u h u . epe r e ol eo i o e fG z
t e w y o s d t es f r n a d r o p r t n d sg o g t ota se e UART n ce sa d t n l td t e rl td h a fu e o t ea dh r wa ec o e ai e in t u h n f r h h wa o h t r t u lu n r sae ea e a h s f r c u t n .F rti t d c d t e UAR g e me tp n i l ot e a t a i s is nr u e h wa o o T a r e n r c pe,t e e c b d t e b sc h r wa e s u t r n h i h n d s r e a i a d r t cu e a d t e i h r
基于NiosⅡ自定制Avalon设备的设计与实现
( 西南交通大学电气工程学 院, 四川 成都 6 03 ) 10 1
摘 要 : Nol系统的构建过程 中,O C B i e 开发环境集成 了许多常用类型 的设备模型, 在 is I S P udr l 供开发者调用 。而对 于其 他的一些设备可 以按照 A a n总线规范将设备驱动程序集成到 S P u d r vo l O C B i e 的硬件抽象层中 , l 同样可以加载 使用 , 方便 了用户开发一个 自定制 的片上 系统 。本文通 过在 Nol系统 内部集成一个 F i I s - C总线 控制器详细说明了 自 定制 A a n设备 的设计方法 , vl o 并通过行为仿真和系统测试验证 了方法的可行性。
c n e in l .T i p p r e p u d d h e o v ne t y b s a e x o n e t me o f d s n n a h t d o e i i g Us r De n d v o e ie hr u h n e r t g a g e - f e A a n d vc t o s i tg ai i l n
维普资讯
第 0 7年 7 3 3 20卷第 H O DG HN E S R M N E N 【 Y U E E TTC
V 13 N . 03 o4 .
J l.0 7 uy2 0
基 于 No 自定 制 A a n设备的设计与实现 isI 1 vl o
fr d v lp r o s .Bu f r 0l r d vc s te r e h u d e n e r td no ad a e b t c l y r f he o e eo e t u e t o t e e ie . h d v r s o l b i tg ae i t h r w r a s a t a e o t l i r S C Bul e c o d n t ao u n r .I s a b o d d n ma e e eo i g a ¥ r De n d S OP i r a c r i g o Av n b s o ms t a o C d l l n e l a e a d k d v l p n U e — f e OC i
基于NiosII的液晶屏控制器SOPC设计
s o f t — c o r e p r o c e s s o r ,S DRAM c o n t r o l l e r , J T AG UAR T,I D c o n t r o l l e r , Av a l o n b u s f o r a f u l l — c o l o r A T 0 7 0 TN8 4
等组成 T F T — I C D控 制 器 。 以 N i o s I I 软 核处 理 器 为 核 心 , 各I P核 ( 如s D R AM 控 制 器 、 T F T I C D控 制 器 等 ) 通 过 Av a l o n 总 线 相 连 接 到 Ni o s l I 上, 并通过 A v a l o n总线 接 口模 块 、 D MA模块 、 F I F ( ) 模块 和时序 产生模块 完成 了 T F T — I C D 控 制 器I P核 设 计 , 实现 8 0 0 ×4 8 0分 辨 率 , 1 6 b i t 颜 色深 度 的 彩 色 图形 显示 控 制 。显 示 实 验 运 行 稳 定 , 图像 清 晰 , 色彩丰富 , 无 闪屏 、 错行等现象 , 视 觉 效 果 良好 , 设 计 具有 良好 的 可 配 置 性 、 复 用 性 和 移 植 性 。实 践 证 明该 设 计 行 之 有 效 。文 中给 了
S ONG Yu e , I U J u n — p i n g ’ , I EI Ru i — t i n g ,CH EN We i , CH ENG Bo ’ 。
( 1 .C o l l e g e o f E l e c t r o n i c s E n g i n e e r i n g,Do n g g u a n U n i v e r s i t y o f T e c h n o l o g y,D o n g g u a n 5 2 3 8 0 8 , C h i n a ; 2 .S c h o o l o f E l e c t r o n i c a n d I n f o r ma t i o n E n g i n e e r i n g, S o u t h C h i n a Un i v e r s i t y o f
NIOSII教程

NIOSII教程NIOS II 是一种基于软核的处理器,可用于 FPGA 设计中。
它是由Altera 公司所开发的。
NIOS II 可以在 FPGA 中进行快速原型设计,并且具有高度可配置性和可扩展性。
本文将介绍 NIOS II 的基本架构和使用方法。
NIOSII架构基于RISC架构,它是一个32位的处理器,并且具有可选的指令扩展。
它的流水线深度可以根据设计的需求进行配置,以实现不同的性能要求。
NIOSII支持多种功能,包括硬件中断、异常处理以及浮点运算等。
在开始使用NIOSII进行开发之前,首先要进行软核处理器的配置。
配置包括选择所需的指令集、流水线深度和其他性能参数。
配置完成后,可以将软核处理器添加到FPGA设计中。
一旦软核处理器被添加到FPGA设计中,就可以开始编写应用程序。
NIOSII支持标准的C/C++语法,并且还提供了一些特殊的函数和指令,用于访问FPGA的硬件资源。
例如,可以使用特殊函数来配置GPIO引脚、读取和写入存储器以及执行其他与硬件交互的操作。
使用NIOSII进行FPGA开发具有许多优点。
首先,它提供了一种快速原型设计的方法,可以大大加快开发进程。
其次,NIOSII的可扩展性和高度可配置性使得它适用于各种不同的FPGA设计需求。
最后,NIOSII的开发工具和调试接口使得开发和调试过程更加简单和高效。
总结起来,NIOS II 是一种基于软核的处理器,适用于 FPGA 设计中。
它具有灵活性和可配置性,可以使用 C/C++ 或 HDL 进行开发,并通过Altera 公司提供的工具链进行编译和调试。
NIOS II 提供了一种快速原型设计的方法,并且适用于各种不同的 FPGA 设计需求。
基于NiosⅡ的SOPC多处理器系统设计方法
2 2 硬 件 互 斥核 。
Nol处理 器 允 许 使用 其 硬 件 互 斥 核 部 件 对 共 享 资 源 i I s
进 行 保 护处 理 。这 个 硬 件 互斥 核 不 是 一 个 NisI 理 器 内 ol处
部 的 部件 , 是一 个 称 为 Mue 而 t x的 S P ul r 件 。 O CB i e 组 d 互 斥核 也可 看 作 一种 共 享 资 源 , 供 一 个 原子 的“ 试 提 测 和置位” 作 , 操 处理 器 测 试 Mue 否 可 行 。如 果 可 行 , t x是 就 在 某 个操 作 中 获 取 它 。 当 处 理 器 结 束 与 Mue 相 关 的 共 tx 享 资 源 使用 时 , 放 该 Mue ; 时 , 一 个 处 理 器 可 能 获 释 tx 此 另
、 , n … nr莹g田 商~ 。 t - - 、 rJ . '
连接 , 在 于 多个 处 理 器 的 软件 设 计 , 它 们 正 常 操 作 , 而 使 相
互 之 间 不 产 生 冲 突 。NisI 处 理器 系统 分 为 2类 : 类 ol 多 一 是 共 享 资 源 的 多处 理 器 系统 ; 一 类 处 理 器 相 互 独 立 , 另 之 间不 进 行 信 息 交 换 。
本 文 将 对 基 于 NisI的 S C 多处 理 器 系 统 的 实 现 ol 0P 原 理 、 计 流 程 和 方 法进 行 详 细 的讨 论 。 设
数据错误 , 少使应用程序出错 , 至使系统崩溃 。 至 甚 共 享存 储 器 的 处 理器 需 要 一个 机 制 来 通 知其 他 处 理 器 何 时 正在 使 用 共享 资源 , 以便 不 受 其 他 处理 器 的干 扰 。
2 1 共 享 存储 器 .
基于NiosⅡ软核处理器的PWM控制器设计
1 引 言
随着微 电子 和计算 机技 术 的发展 以及半 导体 生 产 工艺的 提高 , 工业 生产 、 息 家 电 中 的监 测 控制 、 信 信 号处理 等集成 电路设 计 已经 进入 了 片上可重 构 系 统 (ytm O rg m beC i) 代 。在 传 统 Ss naPo a mal hp 时 e r 的电路设计 中 , 由于 P B板 上各 芯 片 (C) 间 的布 C I 之 线延 时与 干扰 , 以及 本 身 的体 积 和重 量 等 因素 的限 制, 使整机 系统 的性 能受 到 了很 大 的制 约 。现 场 可 编 程 门阵列 ( P A) 以把 整 个 数 字 系统 集 成 在 一 FG 可 个 芯片 上 , 功能 密 度 高 、 积小 、 体 功耗 低 、 可靠 性 高 ,
(. 1 西北 工 业大 学 , 安 7 0 7 ;. 西 10 2 2 西安 理工 大 学 , 安 7 0 4 ) 西 10 8
摘 要 : 绍 了 A ea公 司最 新 开发 的 S P 介 hr O C解 决 方 案— — No I 核 处 理器 , 出 了基 于 i I软 s 提
No 嵌入 式软核 处理 器 的脉 宽调 制 P i I sI WM 控制器 的硬 件 、 软件 设计 方 法 , 给 出 了脉 宽调 制 P 并 WM 软件 编写 的程序 。 实验 结果表 明, 与现 有 的其 它方法 相 比, 方 法具 有 灵 活 、 该 稳定 、 易维 护 、 高效 率
统 的要求 , 而且具 有 现场 可编 程性 , 能够 进行升 级换
代 , 有 广 阔 的应 用 前景 。 具
无 投片风 险且设 计灵 活 , 因此 获得 了广 泛 的应用 , 并 成 为集成 电路设计 的发展 趋势 。但 对 于复杂 的系统
基于Niosll步进电机控制器IP核的设计与实现
性进行 S C设计 , O 其最突出优点是在提供丰富 I P库的 情况下 , 用户可以利用 I P库中的组件按需求来搭建系 统, 有较 大 的灵 活性 。但 是 在供应 商 提供 的 I 中没 P库 有 用户 所需 的 I P核 时 , 户 只 能 根 据 需 要 自定 义 I 用 P
核 。另 外 ,P A 的传统 应用 是 在 通 信 、 业 控 制等 领 FG 工 域 。鉴 于此 , 设计 了一 款 步 进 电机 控 制 器 I P核 , 具 它 有 对步 进 电机 的转 速 、 向及 运 转节 拍 数 进 行 控制 的 转
摘 要
22 5 ) 5 09
根 据 N o I 处理 器 的 A a n总 线规 范 ,设 计 了 一款 面 向 步 进 电机 的 控 制 器 I 。 该 定制 I 采 用软 、 i I s vl o P核 P核
硬件协 同设计 的方法,功 能符合 A a n总线的读 写传输 时序 ,具有 完备的 步进 电机驱 动能 力。仿 真结果 表明 ,该 I vo l P
叶技 21 第2卷 1期 0 年 4 第0 1
Elcr n c S i & Te h /Oc . 5. 201 e to i c . c. t1 1
基 于 No 步 进 电机 控 制 器 I 的 设 计 与 实 现 i l sl P核
刘 洪朋 ,葛广 英
( 聊城大学 物理科学与信息工程学 院,山东 聊城
功能。
2 步 进 电机 控 制器 J 设 is I I P核 包
设备 I P核和主设备 I P核两大类。文中设计 的步进 电 机控制器 I P核是一个受控对象 , 属于从设备 。No I i sI
处理 器通过 A a n总线 对 步 进 电机 控 制 器 I 的 寄 vl o P核 存器 进行 参 数 设 置 , 现 对 步 进 电 机 的 一 系 列 操 作 。 实
基于Nios Ⅱ的SOPC中TFT LCD控制器核的设计
De ino - CD Co t l r r a e sg f TFrL nr l eB s d a o e Co
o e SOPC f o nt h o s I Ni I
BAIZo g y a , U o x a n ・u n H Ba - i
( o ue S i c & T c n lg olg , ri C mp tr ce e eh oo yC l e HabnUnvS i eh Hab 1 0 8 ) n e i. c. c , ri 5 0 0 T n
分辨率 , 显示颜 色深度达到 1 bt试验结果正确。 6 i,
关键字 : O I处理器 ; ao 总线 ; T L D 控 制器核 ; NI S I Av ln TF C
中 图 分类 号 : P 3 . T 323 文 献 标 识 码 : B 文章 编 号 :0 3 2 1 (0 8 2 0 1 3 10 74 2 0 )0 0 6 0
1 引 言
At a公司开发了第二 代软核嵌 ^ lr e 式处理器No , jⅡ 同时开发 s
了用以构建基 于Nj Ⅱ处理  ̄s P ul r使得 用户可以通越 o s o c B ie , d
的首地址处开始读取数据 , 并按照T T的格式输出。 F 图中各模块 由A a n B s连接在一起。 v o u vl u o A a n B s是一种简单的总线结 l
由图 1可以看出 , Sae 作为 l r的S R M o t lr分别 v D A C nr l oe
要受到 P oe o rcs r和 L D C nrlr的控制 , s C ot l oe 为了解决总线冲 突,v o u A a n B s自动在有冲突的接 E l l 上加入 了A bt tr这样 ri a ro
基于NiosⅡ的机器人视觉伺服控制器的研究与设计

的嵌 入 式 系统 开 发 中 ,当 需 要新 的 外 设 模 块 时 往 往需 要 在 P B上 加 入 C 相 应 的 外设 芯 片或 者 换 用 更 高档 的
间长 的 问题 ,提 高 了 实 时性 。 关 键 词 :Nis I o 嵌入 式处 理 器 ;卡 尔 曼 滤 波 器 ;S C,机 器人 视 觉 I OP
引言
运 动 检 测 跟踪 ,使 用 线性 卡尔 曼 a公 司 的 Nis I 理 器 是 波器 算 法 来 快 速 完 成运 动 估 计 及 进 终 研 究 目标 就 是 使 机器 人视 觉 伺 服 e o 处 I
机 器 人 视 觉伺 服 控 制 就 是用 各 设 三 个 部 分 ,如 图 1 示 。 所 摄 像 头 位 置 固定 ,它 所 能 采集
本 文提 出一 个 基 于Nis I 理 种 成像 系统 代替 视 觉 器 官作 为 输入 o 处 I
器 结 构 的 系统 用 于 实 现 机器 人实 时 的敏 感 手 段 ,并 由高 速 处 理器 替 代 图像 的范 围称 为视 觉 区域 ,调 整 摄
CPU, 而 S OP C设 计 可 以 同 一 个
2 0 . 电 字设 计 应 用 w .a .o c 07 6 ww e w c m.n
维普资讯
瓣
F GA芯 片 内加 入相 应 的 外 设 模 块 是 xk 无 偏 和 最 小 方 差 ,根据 这 两 滤 波器 方程 进 行 计 算 。 P () 核 ,并 通 过 在 片 上 的 Av ln总 线 与 个 准 则 可推 导 出对 系 统 的 完 整 的 滤 ao
基于NiosⅡ多核智能交通车载终端的设计与实现
( 1 . 西安 邮 电 大 学 计 算 机 学 院 ,陕西 西 安 7 1 0 1 2 1 ; 2 . 西 安 邮 电大 学 电 子 工程 学 院 ,陕 西 西安 7 1 0 1 2 1 ;
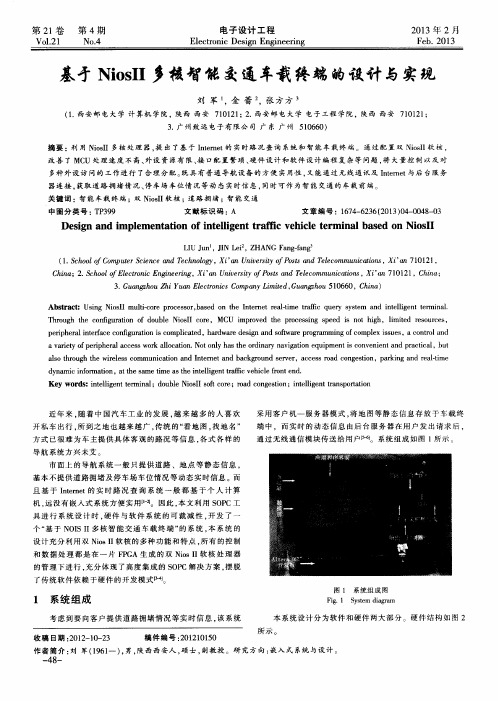
3 . 广 州 致远 电子 有 限公 司 广 东 广 州 5 1 0 6 6 0 ) 摘 要 :利 用 N i o s l I多核 处 理 器 , 提 出 了基 于 I n t e r n e t 的 实 时路 况 查 询 系统 和 智 能 车 栽 终 端 。通 过 配 置 双 N i o s l l 软核 ,
3 . G u ng a z h o u Z h i Y u n a E l e c t r o n c i s C o m p ny a L i m i t e d , G u a n g z h o u 5 1 0 6 6 0 , C h i n a )
Ab s t r a c t :Us i n g Ni o s I I mu l t i - c o r e p r o c e s s o r , b a s e d o n t h e I n t e r n e t r e a l - t i me t r a f f i c q u e r y s y s t e m a n d i n t e l l i g e n t t e r mi n a 1 . T h r o u g h t h e c o n f i g u r a t i o n o f d o u b l e N i o s I I c o r e , MC U i mp r o v e d t h e p r o c e s s i n g s p e e d i s n o t h i g h ,l i mi t e d r e s o u r c e s , p e i r p h e r a l i n t e r f a c e c o n i f g u r a t i o n i s c o mp l i c a t e d ,h a r d wa r e d e s i g n a n d s o f t w a r e p r o g r a mmi n g o f c o mp l e x i s s u e s , a c o n t r o l a n d a v a i r e t y o f p e ip r h e r a l a c c e s s wo r k a l l o c a t i o n . No t o n l y h a s t h e o r d i n a r y n a v i g a t i o n e q u i p me n t i s c o n v e n i e n t a n d p r a c t i c a l ,b u t a l s o t h r o u g h t h e wi r e l e s s c o mmu n i c a t i o n a n d I n t e r n e t a n d b a c k ro g u n d s e r v e r ,a c c e s s r o a d c o n g e s t i o n ,p a r k i n g a n d r e a l — t i me d y n a mi c i n f o ma r t i o n ,a t t h e s a me t i me a s t h e i n t e l l i g e n t t r a f i c v e h i c l e f r o n t e n d . Ke y wo r d s :i n t e l l i g e n t t e mi r n a l ;d o u b l e Ni o s I I s o f t c o r e ;r o a d c o n g e s t i o n;i n t e l l i g e n t t r a n s p o r t a t i o n
基于NIOSⅡ的宽幅打印机多载体控制系统设计
Ke o d : iefr a k jt r tr p n p p r T 6 6 A yw rs w d m tn -e i e ; r t a e ; B 5 0 HQ; uo t o t l o i pn i a t i c nr ma c o
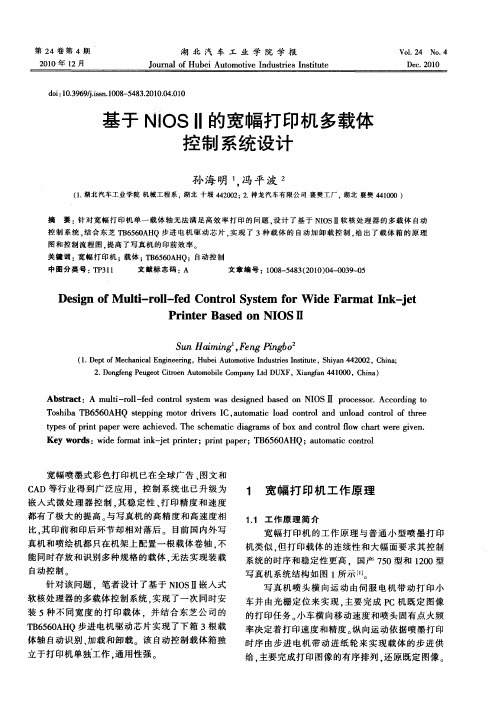
宽幅喷 墨式彩 色 打印机 已在全 球广 告 、 图文 和 C D等行 业得 到 广泛 应用 .控制 系统 也 已升 级 为 A 嵌 入 式微 处理 器 控制 。 稳 定 性 、 印精 度 和速 度 其 打 都 有 了极 大 的提高 写真机 的高 精度 和高速 度相 与 比 , 印前和 印后环 节却相 对 落后 。 目前 国 内外 写 其 真 机和 喷绘机都 只在 机架 上配 置一根 载体 卷轴 . 不 能 同时存 放 和识 别多 种规格 的载体 . 法 实现装 载 无
tp so r t a e e e a h e e . h c e t i g a f o n o to o h r wee gv n y e f i p rw r c i v d T e s h ma i d a r mso x a d c n r l w c at r i e . p n p c b l f
图 和 控制 流程 图 , 高 了写 真 机 的 印前 效 率 。 提
关键词 : 宽幅打印机 ;载体 ; B 5 0 H T 6 6 A Q;自动控制
中 图 分 类 号 : P 1 T31 文献标志码 : A 文 章 编 号 : 0 8 5 8 (0 0 0 - 0 9 0 10 — 4 32 1 ) 0 3 ~ 5 4
写 真机 系统 结构如 图 1 示 … 所 写 真机 喷头 横 向运 动 由伺 服 电 机带 动 打 印小
针对该 问题 .笔 者设 计 了基 于 N O 嵌入 式 ISI I
基于NIOSII软核处理器的研究与设计

提 供构 建管 理工 具, 使用 G u 译器 作为其 支撑 技术 。 ISI D N编 N OI E I
还 可 以运行和 调试 嵌入 式程序 ,设 计入 员可 以将精 力放在 N O I IS I
开发包 的 F G 开 发板或 者 I S 。此 外 ,N O I D 具 有 F A H PA S上 I S II E LS
No I系列 软核 处理器 是 A tr i sI le a的第 二代 FG PA嵌 入式 处 理器 ,其 性能超 过 20 MP ,在 A tr PA中实现非 常理 想 。 0D IS le aFG
A tr l e a的 S r t x S r t xG 、 t a i I和 C c o e系 列 F G t a i 、 t a i X S r t xI y ln PA
开发 。软件 开发 需要 N o l D i s I I E的支 持 。 图 1 基于 N O I 的 S F 软 件开 发流程 。N O I D 是 IS I OC I S IIE具有 编码 生成环 境 以及 可选 的 R O 和 T P I 集 成库 。N O I D TS C/ P I S II E还
全面 支持 N o I处 理器 , 以后推 出的 F G isI PA器 件也将 支持 N o is
工I 。
使用 N o I 件开 发工具 能够 为 N o I 统构建 软件 , i sI 软 is I 系 即一键式 自动 生成适 用于 系统硬 件 的专用 CC + / +运行 环境 。N o is I 集 成开发环 境 ( D )提供 了许 多软件 模板 ,简化 了项 目设置 。 I IE 此外 ,No l开发套 件包 括两 个第 三方 实时操 作系 统 ( TS is I RO )
基于Nios Ⅱ的直流电机PID调速控制系统
基于Nios Ⅱ的直流电机PID调速控制系统作者:陶东娅,陈德益来源:《现代电子技术》2010年第17期摘要:介绍一种基于Nios Ⅱ软核的直流电机PID控制系统。
采用PWM直流电机调速方案,利用Altera公司推出的DE2板作为综合开发平台,采用SOPC技术,通过在FPGA中植入嵌入式软核Nios Ⅱ作为中央处理器,借助PID控制算法实现整个直流电机外围电路的PWM闭环调速控制,这是对直流电机经典控制(即基于单片机或DSP的电机控制)的全新改进。
关键词:Nios Ⅱ软核; 直流电机; PWM; FPGA; PID控制算法中图分类号:TN919-34; TP273+.5文献标识码:A文章编号:1004-373X(2010)17-0180-04PID Speed Control System of DC Motor Based on NiosⅡTAO Dong-ya, CHEN De-yi(College of Mechanical and Electrical Engineering, Taizhou Vocational & Technical College, Taizhou 318000, China)Abstract: A PID control system of DC motor based on soft-core NiosⅡ is introduced. The PWMd development platform, SOPC technologyis used to embed soft-core NiosⅡ in the FPGA as central control device, PID control algorithm is adapted to control the PWM closed loop speed control of the entire peripheral circuits. This method is a different way from traditional motor control(DC motor based on SCM or DSP).Keywords: NiosⅡ soft-core; DC-motor; PWM; FPGA; PID control algorithm0 引言以往的直流电机调速系统通常采用单片机或DSP进行控制,而单片机需要使用大量的外围电路,且系统的可升级性差,如更换控制器,往往要对整个软硬件进行重新设计,可重用性不高[1]。
基于双Nios Ⅱ软核处理器的机器人控制器设计
个 芯 片 内 传递 ,提 高 了控 制 的实 时性 并 减 少 了外 围 环境 对 芯
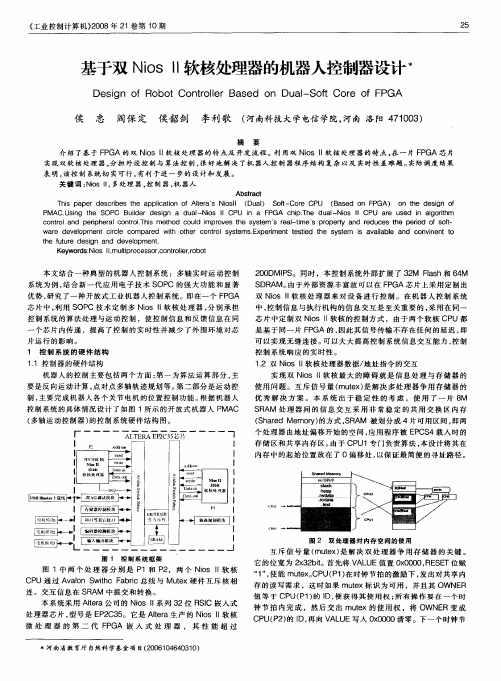
1 控 制 系 统 的硬 件 结构
片运行的影响。
是 基 于 同一 片 F G 的 , PA 因此 其 信 号 传 输 不 存 在 任 何 的 延 迟 , 即 可 以实 现 无 缝 连 接 。 以大 大 提 高 控 制 系 统信 息交 互 能 力 , 制 可 控
war de el m e t i e e v op n cr co pa e w i oter cl m rd t h h co tol y t n r s sems.xp i e t e t d t e y t E er n t s i m e h s sem i a ai bl n s v l e a d c vn t o a on ien t
关键 词 : i l多 处理 器 , 制 器 , 器人 N sI o ’ 控 机
Ab ta t sr c
T i p p r d s r e h p l a in o t r o l ( u 1 S f C r U hs a e e c i s t e a pi t fAl a S Nisl D a ) o t o e CP b c o e —
控 制 系统 响应 的实 时 性 。
11 控制 器 的硬 件 结 构 .
机 器人 的控 制 主 要 包 括 两 个 方 面 : 一 为算 法 运 算 部 分 , 第 主
12 双 Ni I _ o l软核 处 理 器 数 据 / 址 指令 的交 互 s 地
实现 双 Ni I o l软核最大 的障碍就是信 息处理 与存储器 的 s
t e f tr e in a d d v lp n . h u u e d sg n e eo me t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d sg fNOI Ip o e s r a d i t o u e h d p e r p r i n i t g a if r n i l P D) c n e in o S I r c s o , n n r d c s t e a o t d p o o to n e r ld fe e ta ( I o —
tola g ih prn i e a d a g ih s t r e l a i n r l ort m i cpl n l ort m ofwa e r a i to z
Ke r s s r o c n r l r NI I; r p rin i tg a ifr n il ywo d : ev o to l ; OS 1 p o o to n e r l fe e ta e d
C H EN G io p ng X a —i
( e 7 3 I s i t fCS C, n z o 2 0 1, i a Th 2 n t u e o I Ya g h u 2 5 0 Ch n ) t
Absr c : ta t Thi a r i t o c s h sg a s r o c ntole s d on NI I d s u s s h s p pe n r du e t e de i n of e v o r l r ba e OS I , ic s e t e ha d r sgn m e h nd p i cpl s d on fe d pr g a r wa e de i t od a r n i e ba e i l o r mm a l a e a r y, v s t e h r wa e b e g t r a gi e h a d r
与 一 个 固 定 的 、 品 微 控 制 器 不 同 , OS 1处 成 NI I
制算 法计 算 , 计 了结构 简 单 灵 活 , 便 扩 展 、 设 方 升级 的数 字伺 服控 制器 。
1 控 制 系统 组 成 及 NI OS Ⅱ简介
一Байду номын сангаас
般 伺服控 制 系统 由控制 器 、 动器 、 控对象 驱 被
动被 控对 象 。
作 为伺 服 控 制 系统 核心 的伺 服控 制 器 , 本文 设
计采 用 的是 基 于 NI I的 嵌 入 式 处 理 器 系 统 。 OS I
软核 处 理器技 术 , 过 软核 处 理 器完 成 数 字 P D控 通 I
NI 是 基 于哈 佛 结 构 的 3 OS 1 2位 精 简 指 令 集 计 算
和反 馈装 置 4 部分 组成 , 图 1 示 。 个 如 所 其 中控制器 部分 根据 指令 信号 和反馈 信 号完成 各种 控制算 法计 算 , 为控 制系统 的核心 ; 驱动 器为控
理 器构 成嵌入 式 系统 , 渐 成 为 数 字伺 服 控 制 器设 逐 计 的更好 选择 。 本 文结合 新技 术 的发 展 方 向, 以大 规 模 F GA P
芯 片 为 设 计 基 础 , 用 基 于 F G 芯 片 的 NI 运 P A OS 1
测速 计 。伺服 控制 系统 的作用 就是 根据指 令信 号驱
0 引 言
目前高性 能 的数字伺 服 控制器 往往 采用 的是 现
指令
场 可编 程 门阵列 + 数字 信 号处 理 ( P F GA+DS ) P 机
制, 随着 微 电子 技 术 的 发 展 , F GA 中植 入 软 核 在 P
处 理 器 的 可 编 程 片 上 系 统 ( OP 技 术 的 成 熟 , S C) 利
机 ( S ) 入式 处理 器 , 有 超过 1 O MI S的性 RI C 嵌 具 5D P 能 , 持 完全 的 3 位 指令 集 、 据 总线 和地址 空间 , 支 2 数 具有 3 2位 通 用 目的寄存 器 和 3 2个 外部 中断 源l 。 1 ] 图 2为 NI S Ⅱ处 理器 系统 的典 型结构 [ 。 O 2 ]
关键词 : 伺服控制器 ; I S1; N O 比例积分微分 I
中 图分 类 号 : P 7 T 23
文 献标识 码 : B
文章 编号 : N 211 (020—11 3 C 3—4321)2 1— 0 0
De i n o e v n r le s d o o I sg f S r o Co t o l r Ba e n Ni s I
21 0 2年 4月
舰 船 电 子 对 抗
SH I PB0 AR D ELECTRO N I C0 U NT ERM EASU R E C
A pr 2 2 . 01
Vo . 5 No 2 13 .
第3 5卷第 2 期
基 于 NI OS Ⅱ的伺 服 控 制器 设 计
程 小 平
( 舶 重 工 集 团公 司 73所 , 州 25 0 ) 船 2 扬 2 0 1
摘要 : 介绍 了一种基于 N OS I的伺服控制器的设计 。论述了其基于现场 可编程 门阵列 ( P I I F GA) 的硬件设计方 法、
原 理 , 出 了 NI S 1处 理 器 的硬 件 设 计 , 绍 了 采 用 的 比例 积 分 微 分 ( I ) 制 算 法 原 理 和 算 法 软 件 实 现 。 给 O I 介 PD 控
图 1 伺 服 控 制 系 统 框 图
制 系统 的功率 驱动 部分 ; 被控对 象 为受控 部分 , 在伺
服控 制 系统 中一般 为 伺 服 电机 ; 反馈 装 置 一 般 为检 测位 置 的旋转 变压 器 或 编 码器 , 或者 是 用 于 测速 的
用 F GA 中的 可 编程 逻 辑 资源 和 NI S 1 核 处 P O I软