ABB_CLMD
ABB机器人高级编程指令
ABB机器人高级编程指令嘿,朋友!今天咱们来聊聊 ABB 机器人那些让人又爱又恨的高级编程指令。
想象一下,你走进一个巨大的工厂车间,到处都是忙碌的 ABB 机器人,它们的动作精准而迅速,就像一群训练有素的超级战士。
而让这些机器人如此厉害的,正是那些神秘的高级编程指令。
先来说说“WaitTime”指令吧。
这就像是给机器人按下了“暂停键”,让它乖乖等待一段时间。
比如说,你让机器人去焊接一个零件,但是需要等待焊缝冷却,这时候“WaitTime”就派上用场啦。
你只需要设定好等待的时间,机器人就会老老实实地等着,一点儿也不会着急。
还有“MoveAbsJ”指令,这可是让机器人进行绝对关节运动的神器。
就好比机器人是一个灵活的舞者,能够一下子跳到你指定的那个位置。
有一次,我在调试一个机器人的程序,设定好“MoveAbsJ”指令的参数后,满心期待地按下启动键,结果机器人的动作比我想象的还要迅速和准确,那种感觉,就像是看到自己精心培育的花朵突然绽放,心里别提多有成就感了!“ProcCall”指令也很有趣。
它就像是一个召唤术,可以让机器人调用其他的程序模块。
比如说,一个机器人在完成一个复杂的装配任务时,需要先执行抓取零件的程序,再执行安装零件的程序,这时候“ProcCall”就能把这两个程序巧妙地连接起来,让机器人的工作变得有条不紊。
再讲讲“IF…ELSE…”条件判断指令。
这就像是机器人有了自己的“小脑袋瓜”,能够根据不同的情况做出不同的反应。
有一回,我给一个机器人编写程序,让它根据零件的颜色来进行分类。
当零件是红色的时候,机器人会把它放到左边的箱子里;如果是蓝色,就放到右边的箱子里。
通过“IF…ELSE…”指令,机器人完美地完成了任务,没有出一点儿差错。
ABB 机器人的高级编程指令就像是一把把神奇的钥匙,能够打开机器人无限的可能性。
但是要掌握这些指令可不容易,需要我们不断地学习、实践和摸索。
就像我刚开始接触的时候,常常会因为一个小错误而让机器人“乱了阵脚”,但是我没有放弃,通过一次次的尝试和改进,终于能够熟练地运用这些指令,让机器人乖乖听话。
ABB无功补偿和滤波产品介绍
ABB无功补偿方案
功率因数控制器
用户界面良好的 功率因数控制器
RVC
© ABB Group - 9 08-Oct-27
ABB无功补偿方案
功率因数控制器
功率因数控制器RVC的优点:
自动或手动控制功率因数:满足不同需求 自动或手动设定RVC:调试方便 过/欠电压保护功能:编程设定保护门限 高效的投切方式:采用直接投切,循环投入和积分运算方法,减少开关切 换次数,避免不必要的投切
© ABB Group - 15 08-Oct-27
ABB无功补偿方案
谐波对无功补偿的影响(并联谐振)
并联谐振在共振频率下呈现极高阻抗,即使很低的谐波电流将会产生非常大的 谐波电压!!!
阻抗 一定 低 高
电流 固定 固定 固定
电压 一定 低 非常高
I
Z U
© ABB Group - 16 08-Oct-27
© ABB Group - 36 08-Oct-27
ABB有源滤波器案例分析 滤波前A相谐波电流
© ABB Group - 37 08-Oct-27
ABB有源滤波器案例分析 滤波后A相谐波电流
CT测量信号线
© ABB Group - 33 08-Oct-27
ABB有源滤波器案例分析
ABB有源滤波器案例分析 滤波前系统三相谐波电流电压波形记录
© ABB Group - 34 08-Oct-27
ABB有源滤波器案例分析 滤波后系统三相谐波电流电压波形记录
© ABB Group - 35 08-Oct-27
关于谐波的相关标准和规范
目标: 确保电网的谐波畸变不超过 电网和设备所能承受的限度 要求: THDV ≤ 5% 5% < THDV ≤ 10% THDV > 10% 相关参考标准:
CLMR7% 45kVAR 400V 50Hz电容电抗器组合

02705
CLMR7% 50 kVAR 690V 50Hz CLMR0011 CLMD63/67 kVAR 830V 50Hz 10101382
R7% 50 kVAR 690V
50Hz 10102706
CLMR7% 25 kVAR 220V 50Hz CLMR0012 CLMD63/40 kVAR 280V50Hz 10081458
R7% 25 kVAR 220V
50Hz 10103552
CLMR7% 50 kVAR 220V 50Hz CLMR0013 CLMD63/40 kVAR 280V50Hz x 2 10081458 R7% 50 kVAR 220V 50Hz
10103554
CLMR7% 25 kVAR 480V 50Hz CLMR0014 CLMD53/33.6 kVAR 576V 50Hz 10103557 R7% 25 kVAR 480V 50Hz
50Hz 10102735
CLMR7% 25 kVAR 400V 50Hz *CLMR0008 CLMD53/33.5 kVAR 480V 50Hz 10102742 R7% 25 kVAR 400V 50Hz
10102736
CLMR7% 50 kVAR 400V 50Hz *CLMR0009 CLMD63/67 kVAR 480V 50Hz 65100032
50Hz 10090577
CLMR14% 45 kVAR 400V 50Hz *CLMR0006 CLMD63/67.8 kVAR 525V 50Hz 10090539 R14% 45 kVAR 400V
50Hz 10090578
CLMR7% 25 kVAR 690V 50Hz CLMR0010 CLMD53/33.6 kVAR 830V 50Hz 10101381 R7% 25 kVAR 690V 50Hz
ABB电容补偿
RC 及 RCR 系列
无 功 功 率 补 偿柜 方 案
R - 电抗器
特性与优点:
多气隙电抗器:最大限度降低三相之间 的电感误差,专利技术。在电容器组投 切及电网严重畸变的环境下,能够确保 最大的线性度范围。 专用软件优化设计:充分考虑谐波情况 下无功补偿应用对电抗器的特殊要求, 即线性度范围宽,适应畸变电网,电抗 器损耗低。 非线性负载模式测试:特别采用 ABB三相谐波发生器注入谐波电 流,测试谐波状态下电抗器的散热及过电压等情况下的技术性能。 耐热性高:真空高压下使用温度等级为 H 的热固浸漆浸渍整个电 抗器,确保电抗器在50℃的环境温度下稳定工作,最大储存温度 达75℃
产品简介
RC 及 RCR 系列
无功功 率 补 偿柜 方 案
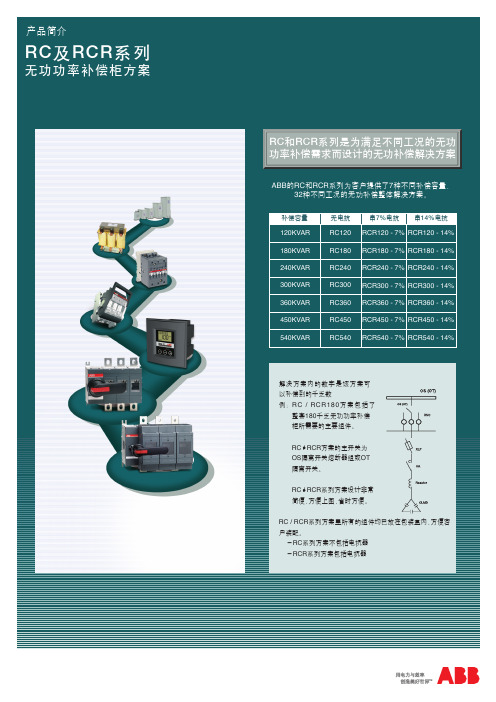
RC和RCR系列是为满足不同工况的无功 功率补偿需求而设计的无功补偿解决方案
ABB的RC和RCR系列为客户提供了7种不同补偿容量, 32种不同工况的无功补偿整体解决方案。
补偿容量 无电抗 串7%电抗 串14%电抗
120KVAR 180KVAR 240KVAR 300KVAR 360KVAR 450KVAR 540KVAR
随着电力电子技术的广泛应用与发展,供电系统中增加了大量的非线 性负载,如变频器、 UPS、计算机、电弧炉、大型轧钢机、电力机 车等,由于它们均以开关方式工作的,会引起电网电流、电压波形发 生畸变,从而引起电网的谐波“污染”。 如系统中有谐波的存在,在电容器上增加负荷反映为对电流更高的损 耗,更高的电流损耗意味着热过载,致使电容的寿命缩短。 在并联电容器的回路中串联调谐电抗器是非常有效和可行的方法。串 联调谐电抗器的主要作用是抑制高次谐波和限制合闸涌流,防止谐波 对电容器造成危害,避免电容器装置的接入对电网谐波的过度放大和 谐振发生。
低压电容器 - CLMD
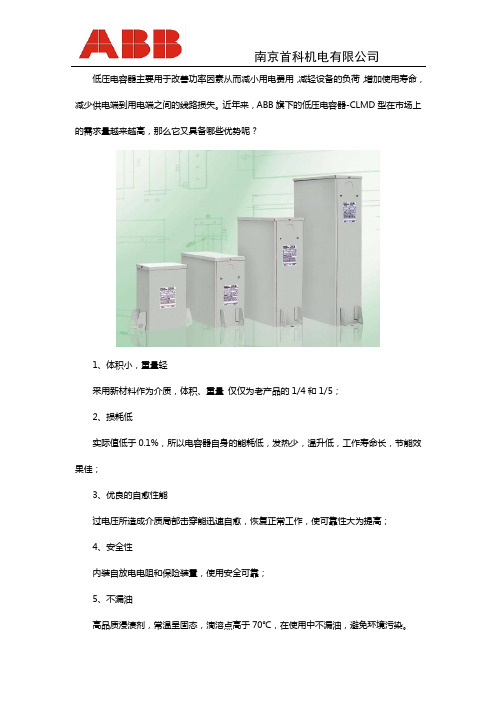
低压电容器主要用于改善功率因素从而减小用电费用,减轻设备的负荷,增加使用寿命,减少供电端到用电端之间的线路损失。
近年来,ABB旗下的低压电容器-CLMD型在市场上的需求量越来越高,那么它又具备哪些优势呢?
1、体积小,重量轻
采用新材料作为介质,体积、重量仅仅为老产品的1/4和1/5;
2、损耗低
实际值低于0.1%,所以电容器自身的能耗低,发热少,温升低,工作寿命长,节能效果佳;
3、优良的自愈性能
过电压所造成介质局部击穿能迅速自愈,恢复正常工作,使可靠性大为提高;
4、安全性
内装自放电电阻和保险装置,使用安全可靠;
5、不漏油
高品质浸渍剂,常温呈固态,滴溶点高于70℃,在使用中不漏油,避免环境污染。
如果您想了解更多有关低压电容器-CLMD型方面的信息,在此推荐您联系南京首科机电有限公司咨询详情。
南京首科机电有限公司集生产、贸易、技术、服务于一体的机电专业性公司。
经营广泛、品种繁多,主营批发零售各国知名低压电器、电工器材、工业用通风及抽风系统。
公司以“诚信铸就品牌,服务带来效益”的经营理念。
推行“VIP”式的营销服务机制,努力做好售前、售中、售后服务,并为用户建立档案,定期开展大客户综合回访,赢来了越来越宽广的市场空间。
公司主要代理销售品牌:总代理ABB、施耐德电气、〈FUI〉富士电机、〈MITSUBISHI〉三菱电机、〈OMRON〉欧姆龙自控元器件、美国通用GE电器、韩国LS产电、士林电机、、西门子、火灾监控系统、工业插头插座、订制配电箱配电柜。
若您有相关方面的业务需求,欢迎登陆官网:或拨打吸顶悬浮位置电话咨询!。
ABB变频器的型号

ABB变频器ACS800 、510、350、550ABB变频器ACS800标准规格:(通用型)● 相数,电压,频率:三相380V 50/60Hz●过载电流额定:额定输出电流的150%-1min●额定频率:50,60Hz●最高输出频率:参数设定可对应至500Hz相应型号:(1.5KW~110KW)ABB部分型号(一)ACS510 IP21系列变频器ACS510-01-03A3-4ACS510-01-04A1-4ACS510-01-05A6-4ACS510-01-07A2-4ACS510-01-09A4-4ACS510-01-012A-4ACS510-01-017A-4ACS510-01-025A-4ACS510-01-031A-4ACS510-01-038A-4ACS510-01-046A-4ACS510-01-045A-4ACS510-01-060A-4ACS510-01-072A-4ACS510-01-088A-4ACS510-01-096A-4ACS510-01-125A-4ACS510-01-124A-4ACS510-01-157A-4ACS510-01-180A-4ACS510-01-195A-4ACS510 IP54系列变频器ACS510-01-03A3-4+B055 ACS510-01-04A1-4+B055 ACS510-01-05A6-4+B055 ACS510-01-07A2-4+B055 ACS510-01-09A4-4+B055 ACS510-01-012A-4+B055 ACS510-01-017A-4+B055 ACS510-01-025A-4+B055 ACS510-01-031A-4+B055 ACS510-01-038A-4+B055 ACS510-01-046A-4+B055 ACS510-01-045A-4+B055 ACS510-01-060A-4+B055 ACS510-01-072A-4+B055 ACS510-01-088A-4+B055 ACS510-01-096A-4+B055 ACS510-01-125A-4+B055 ACS510-01-124A-4+B055 ACS510-01-157A-4+B055 ACS510-01-180A-4+B055ACS550 IP21系列变频器ACS550-01-03A3-4ACS550-01-04A1-4ACS550-01-05A4-4ACS550-01-06A9-4ACS550-01-08A8-4ACS550-01-012A-4ACS550-01-015A-4ACS550-01-023A-4ACS550-01-031A-4ACS550-01-038A-4ACS550-01-045A-4ACS550-01-044A-4ACS550-01-059A-4ACS550-01-072A-4ACS550-01-087A-4ACS550-01-096A-4ACS550-01-125A-4ACS550-01-124A-4ACS550-01-157A-4ACS550-01-180A-4ACS550-01-195A-4ACS550 IP54系列变频器ACS550-01-03A3-4+B055 ACS550-01-04A1-4+B055 ACS550-01-05A4-4+B055 ACS550-01-06A9-4+B055 ACS550-01-08A8-4+B055 ACS550-01-012A-4+B055 ACS550-01-015A-4+B055 ACS550-01-023A-4+B055 ACS550-01-031A-4+B055 ACS550-01-038A-4+B055 ACS550-01-045A-4+B055 ACS550-01-044A-4+B055 ACS550-01-059A-4+B055 ACS550-01-072A-4+B055 ACS550-01-087A-4+B055 ACS550-01-096A-4+B055 ACS550-01-125A-4+B055 ACS550-01-124A-4+B055ACS550-01-180A-4+B055ACS550-01-195A-4+B055ABB电气传动系列介绍:ACS150 (标准袖珍型)相应型号:(0.37KW~4KW)ABB通用机械传动是专为机械制造行业所设计的。
ABB机器人常用指令详解
ABB机器人常用指令详解关键信息项:1、指令名称:____________________2、指令功能:____________________3、适用场景:____________________4、参数设置:____________________5、示例代码:____________________11 移动指令111 MoveL 指令MoveL 指令用于线性移动机器人的工具中心点(TCP)到指定的目标位置。
它以直线方式移动,确保路径是一条直线。
指令格式:MoveL ToPoint, Speed, Zone参数说明:ToPoint:目标位置的坐标。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
112 MoveJ 指令MoveJ 指令用于关节运动,机器人以最快的速度将工具中心点移动到目标位置。
指令格式:MoveJ ToPoint, Speed, Zone参数说明:ToPoint:目标位置的关节角度。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
12 输入输出指令121 SetDO 指令SetDO 指令用于设置数字输出信号的值。
指令格式:SetDO Signal, Value参数说明:Signal:要设置的数字输出信号的名称。
Value:设置的值,通常为 0 或 1。
122 WaitDI 指令WaitDI 指令用于等待数字输入信号达到指定的值。
指令格式:WaitDI Signal, Value, Timeout参数说明:Signal:要等待的数字输入信号的名称。
Value:期望的信号值。
Timeout:等待的超时时间,如果在超时时间内未达到指定值,则程序继续执行。
13 逻辑指令131 IF 指令IF 指令用于根据条件执行不同的操作。
指令格式:IF Condition THEN Statements ELSE Statements ENDIF 参数说明:Condition:判断条件。
ABB无功补偿解决方案
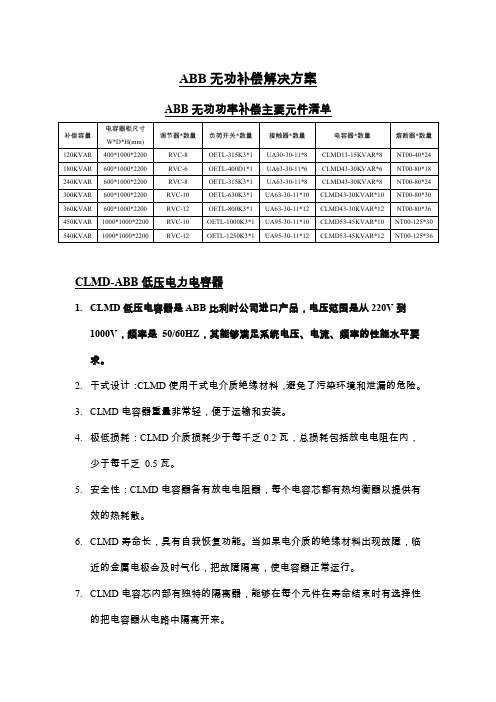
ABB无功补偿解决方案ABB无功功率补偿主要元件清单CLMD-ABB低压电力电容器1.CLMD低压电容器是ABB比利时公司进口产品,电压范围是从220V到1000V,频率是50/60HZ,其能够满足系统电压、电流、频率的性能水平要求。
2.干式设计:CLMD使用干式电介质绝缘材料,避免了污染环境和泄漏的危险。
3.CLMD电容器重量非常轻,便于运输和安装。
4.极低损耗:CLMD介质损耗少于每千乏0.2瓦,总损耗包括放电电阻在内,少于每千乏0.5瓦。
5.安全性:CLMD电容器备有放电电阻器,每个电容芯都有热均衡器以提供有效的热耗散。
6.CLMD寿命长,具有自我恢复功能。
当如果电介质的绝缘材料出现故障,临近的金属电极会及时气化,把故障隔离,使电容器正常运行。
7.CLMD电容芯内部有独特的隔离器,能够在每个元件在寿命结束时有选择性的把电容器从电路中隔离开来。
8.CLMD具有防火性能,所有电容芯元件有蛭石环绕。
蛭石是一种无机,惰性,防火及无毒性的粒状材料,能够吸收箱体内产生的能量,熄灭任何火焰。
9.CLMD电容器的引线端子采用坚固的材料,避免了安装时发生损坏,减少了维修量。
10.CLMD电容器符合国际电工委员会IEC31-1、IEC31-2的要求。
RVC-ABB功率因数控制器1.ABB公司的RVC功率因数控制器是ABB比利时公司进口产品,其能够满足系统电压、电流和频率的性能水平要求。
2.ABB公司的RVC功率因数控制器运行方式灵活,有自动运行模式,手动运行模式,自动设定模式,手动设定模式四种,方便用户使用。
3.RVC调试功能强大,能够设定目标功率因数,控制器灵敏度C/K,相移,切换延时,输出,电容器切换顺序,而且具有很好的自动初始化功能。
4.RVC采用液晶显示,液晶显示屏对比度用温度自动补偿,用户界面友好,方便用户手动操作,能够显示功率因素,报警信号,超温信号,电容器需进行切换的指示信号。
5.具有各种报警功能:所有输出回路均被接通后,如果6分钟内功率因素不能达到目标值则报警,内部温度上升到85摄氏度报警,电源掉电报警并随即切断所有电容器。
ABB机器人高级编程指令

ActUnit orbit_a; MoveL p30,v100,z10,tool1;
P30,外軸聯動
限製﹕
Orbit_a
不能在指令StorePath…RestorePath內使用
不能在預置程序RESTART內使用
2024/8/6
計數指令
Add Incr
2024/8/6
Clear Decr
計數指令-Add
PathSampleTime : 路徑控制% (num)
應用﹕ 當前指令用於更改機器人主機系統參數;
調整機器人路徑采樣時間﹐從而達到控制 機器人運行路徑的效果﹐通過此指令可以 提高機器人運動精度或縮短循環時間﹐路 徑控制默認值為100%﹐調整範圍為25%-400% 路徑控制百分比越小﹐運動精度越高﹐占用 CPU資源也越多
不能在指令StorePath…RestorePath內使用
不能在預置程序RESTART內使用
不能在機器人轉軸處於獨立狀態時使用
2024/8/6
外軸激活指令-DeactUnit
DeactUnit MecUnit
MecUnit:
外軸名 (mecunit)
應用﹕
將機器人一個外軸失效﹐例如﹕當多個外 軸公用一個驅動板時﹐通過外軸激活指令 DeactUnit使當前所使用的外軸失效﹔
VelSet ConfL PathReasol SoftDeact
2024/8/6
运动控制指令-AccSet
AccSet Acc,Ramp; Acc:机器人加速度百分率(num) Ramp:机器人加速度坡度(num) 应用﹕ 当机器人运行速度改变时﹐对所产生的相 应加速度进行限制﹐使机器人高速运行时 更平缓﹐但会延长循环时间﹐系统默认值 为﹕AccSet 100,100;
ABB全部编程指令详解
ABB全部编程指令详解ABB编程指令是ABB机器人控制系统的一部分,它是指示机器人执行特定操作的指令集。
ABB编程指令非常丰富,包括运动指令、逻辑指令、传感器指令等等。
下面我们将对ABB编程指令进行详细的介绍。
1. 运动指令ABB运动指令用于控制机器人的运动,包括直线运动、圆弧运动、旋转运动等等。
其中比较常见的运动指令包括:(1) MOVEJ:用于控制机器人进行关节运动,即指定机器人的每个关节移动到特定的位置。
(2) MOVEL:用于控制机器人进行直线运动,即指定机器人从当前位置移动到目标位置,并沿着一条直线路径到达目标位置。
(3) MOVEC:用于控制机器人进行圆弧运动,即指定机器人从当前位置移动到目标位置,并在目标位置旋转到指定的方向上。
(4) MOVER:用于控制机器人进行旋转运动,即指定机器人绕着某个轴旋转到特定的位置。
2. 逻辑指令ABB逻辑指令用于控制机器人的逻辑操作,包括条件判断、循环结构等等。
其中比较常见的逻辑指令包括:(1) IF-ELSE:用于进行条件判断操作,即如果某个条件成立,则执行特定的操作,否则执行另外的操作。
(2) WHILE-DO:用于进行循环结构操作,即指定某个操作重复执行直到满足某个条件。
(3) SWITCH-CASE:用于进行多分支判断操作,即如果某个条件成立,则执行对应的操作,否则执行默认操作。
3. 传感器指令ABB传感器指令用于控制机器人的感知操作,包括传感器读取、数据处理等等。
其中比较常见的传感器指令包括:(1) READ:用于读取传感器数据,即获取传感器传回的信息。
(2) FILTER:用于对传感器数据进行滤波操作,即去除噪声和干扰。
(3) CALC:用于对传感器数据进行计算操作,即对传感器数据进行处理,得出特定的结果。
4. 其他指令除了上述三类指令外,ABB编程指令还包括其他指令,比如:(1) WAIT:用于控制机器人等待一段时间,直到时间到达才继续执行下一个操作。
C# 读写ABB PLC数据并实现语音报警
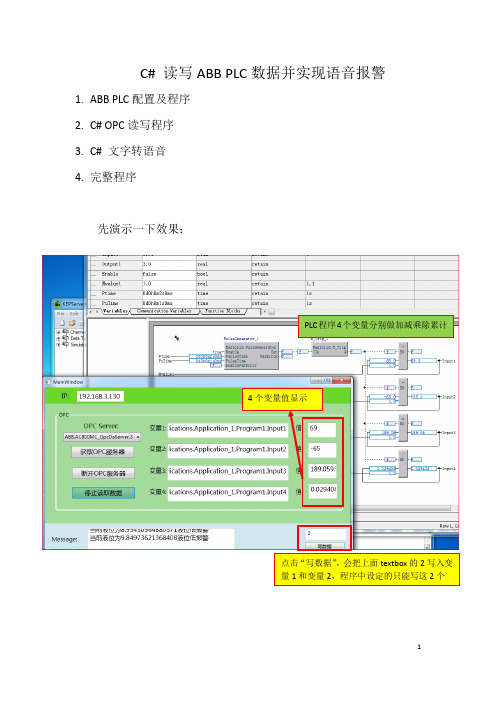
C# 读写ABB PLC数据并实现语音报警1.ABB PLC配置及程序2.C# OPC读写程序3.C# 文字转语音4.完整程序先演示一下效果:PLC程序4个变量分别做加减乘除累计4个变量值显示点击“写数据”,会把上面textbox的2写入变量1和变量2,程序中设定的只能写这2个1.ABB PLC配置及程序1.1安装使用Compact_Control_Builder_AC_800M_5.1.1-1,安装如下几个软件:1.2新建工程编写程序1.安装Compact版2.安装说明书3.安装OPC服务器,C#通过它来读取PLC数据4.安装仿真器1.新建控制器,IP地址后续会讲本文主要OPC读取数据,PLC的硬件不介绍由于我们是仿真实现,需要先开启仿真项,如下:1.在Tool工具栏开启硬件仿真2.在硬件配置里勾选硬件仿真现在可以看到硬件状态多了S,如下:硬件上都有个下标S ,说明开启了硬件仿真然后在Program1中编写程序,此处写了个1s累计加减乘除,如下:最终我们会在C#读取Input1~Input4这4个变量,并可以在C#写入数据。
1.3仿真器设置以上全部配置完,然后就可以下载程序了:注意:这个地址可能每次都不一样1.打开仿真器,在File文件找到IP地址2. 根据上面的IP更改PLC的地址输入找到的IP点击下载硬件配置及程序至PLC在线后状态可以看到在线程序中数据变化1.4 OPC Server配置ABB PLC配置至此全部完成。
2.输入当前IP点击连接1.连接成功显示“笑脸”2.C# OPC读写程序OPC的数据访问方法分别有同步访问、异步访问和订阅式数据采集方式三种。
此处我们采用订阅式数据读取,异步写入数据。
由于读取OPC数据采用的是数据变化刷新,在数据没有变化时有点问题,需定义全局数组然后读取放入,这样数据未变化就保持上次的值。
//OPC读取数据订阅式,在上面PLC我们的4个变量都是Real类型,因此此处定义的都是Double //不管读和写都是从数组的第二个开始,因此我们第一个数据都是XXX[1],然后依次往后private void Group_DataChange(int TransactionID, int NumItems, ref Array ClientHandles, ref Array ItemValues, ref Array Qualities, ref Array TimeStamps){double Value1 = Convert.ToDouble(ItemValues.GetValue(1));double Value2 = Convert.ToDouble(ItemValues.GetValue(2));double Value3 = Convert.ToDouble(ItemValues.GetValue(3));double Value4 = Convert.ToDouble(ItemValues.GetValue(4));}//OPC异步写入数据private void WBtn_Click(object sender, RoutedEventArgs e){Array AsycWr_Value;Array SerHandles;object[] tempWrData = new object[3];//写入的数据必须是object类型的int[] tempSerHandles = new int[3];//将输入的数据赋给数组,然后转成Array给AsycWr_ValuetempWrData[1] = (object)WriteText.Text;tempWrData[2] = (object)WriteText.Text;AsycWr_Value = (Array)tempWrData;//将输入数据对应的服务器句柄赋给变量,然后转成Array类型给SerHandlestempSerHandles[1] = Convert.ToInt32(sHandles.GetValue(1));tempSerHandles[2] = Convert.ToInt32(sHandles.GetValue(2));SerHandles = (Array)tempSerHandles;try{Group.AsyncWrite(2, ref SerHandles, ref AsycWr_Value, out Errors_Wr, TransactionID, out CancleID);}catch (Exception e1){ShowMessage(e1.ToString());}3.C# 文字转语音引用自带的System.Speech//三个参数:语速,音量,内容public void SpeechVideo_Read(int rate, int volume, string speektext){speech.Rate = rate;speech.Volume = volume;speech.SpeakAsync(speektext);}if (Value1>80) //语音报警测试{SpeechVideo_Read(0, 80, "当前液位为" + Value1.ToString() + "液位高报警");}4.完整程序Xaml界面设计就不介绍了,以下为代码:using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Threading.Tasks;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using ;using System.Speech.Synthesis; //需引用自带的Speech.DLL文件using OPCAutomation; //安装Kepserver后会自带这个DLL文件,需引用namespace ABB语音报警{public partial class MainWindow : Window{OPCServer Server;OPCGroups Groups;OPCGroup Group;OPCItems Items;OPCItem Item;private bool Flag = true;private string[] s = new string[100];private int[] GetOpcValue = new int[100];SpeechSynthesizer speech = new SpeechSynthesizer();Array strItemIDs;Array cHandles;Array sHandles;Array Erros_read;Array Errors_Wr;int TransactionID = 1;int CancleID;object RequestDataTypes = null;object AccessPaths = null;public MainWindow(){InitializeComponent();Server = new OPCServer();}private void Btn2_click(object sender, RoutedEventArgs e)//获取OPC服务器{if (TextBox1.Text == " "){MessageBox.Show("请先输入IP地址!");}else{string ip = TextBox1.Text.Trim();//去除两端空格try{object progIds = Server.GetOPCServers(Dns.GetHostByAddress(ip).HostName); foreach (var item in (Array)progIds){OpcServerList.Items.Add(item);//所有OPC服务器放入Combox中}OpcServerList.SelectedIndex = 0;//默认选择第一个OPC服务器if (OpcServerList.Text == null){ShowMessage("获取服务器失败,请检查OPC服务器是否启动!");}else{ShowMessage("成功获取OPC服务器!");}}catch (Exception err){ShowMessage(err.ToString());}}}private void ShowMessage(string str)//文本框消息提示{TextBox3.AppendText(str + "\r\n");TextBox3.ScrollToEnd();}private void Btn3_Click(object sender, RoutedEventArgs e)//连接OPC服务器{if (OpcServerList.Text == ""){MessageBox.Show("请先选择OPC服务器!");}else{try{if (Server.ServerState == Convert.ToInt32(OPCServerState.OPCDisconnected)) {Server.Connect(OpcServerList.Text);Btn3.Content = "断开OPC服务器";ShowMessage("成功连接OPC服务器!");Groups = Server.OPCGroups;Groups.DefaultGroupDeadband = 0;//缓冲区死区Groups.DefaultGroupIsActive = true;//缓冲区活动激活Groups.DefaultGroupUpdateRate = 1000;//缓冲区刷新时间Group = Groups.Add("group1");Group.IsSubscribed = true; //缓冲区订阅Datachange事件Items = Group.OPCItems;Group.AsyncWriteComplete += Group_AsyncWriteComplete; //OPC写事件//读取4个变量值string[] tmpIDs = new string[5];int[] tmpCHandle = new int[5];for (int i = 1; i < 5; i++){tmpCHandle[i] = i;}tmpIDs[1] = OpcValve1.Text;tmpIDs[2] = OpcValve2.Text;tmpIDs[3] = OpcValve3.Text;tmpIDs[4] = OpcValve4.Text;strItemIDs = (Array)tmpIDs;cHandles = (Array)tmpCHandle;Items.AddItems(4, ref strItemIDs, ref cHandles, out sHandles, out Erros_read, RequestDataTypes, AccessPaths); //添加需要读取的4个变量}else{Server.Disconnect();Btn3.Content = "连接OPC服务器"; ;ShowMessage("OPC服务器连接已断开!");}}catch (Exception err){ShowMessage(err.ToString());}}}private void Btn4_click(object sender, RoutedEventArgs e)//开始/停止读取数据{if (Flag == true){Group.DataChange += Group_DataChange;Btn4.Content = "停止读取数据";Btn4.Background = Brushes.Green;Flag = false;}else{Group.DataChange -= Group_DataChange;Btn4.Content = "开始读取数据";Btn4.Background = new SolidColorBrush(Color.FromRgb(221,221,221));Flag = true;}}//OPC读取数据订阅式private void Group_DataChange(int TransactionID, int NumItems, ref Array ClientHandles, ref Array ItemValues, ref Array Qualities, ref Array TimeStamps){double Value1 = Convert.ToDouble(ItemValues.GetValue(1));double Value2 = Convert.ToDouble(ItemValues.GetValue(2));double Value3 = Convert.ToDouble(ItemValues.GetValue(3));double Value4 = Convert.ToDouble(ItemValues.GetValue(4));CurValue1.Text = Value1.ToString();CurValue2.Text = Value2.ToString();CurValue3.Text = Value3.ToString();CurValue4.Text = Value4.ToString();if (Value1>80) //测试语音报警{ShowMessage("当前液位为" + Value1.ToString() + "液位高报警");SpeechVideo_Read(0, 80, "当前液位为" + Value1.ToString() + "液位高报警");}if (Value3 < 10){ShowMessage("当前液位为" + Value3.ToString() + "液位低报警");SpeechVideo_Read(0, 80, "当前液位为" + Value3.ToString() + "液位低报警");}}//文字转语音 rate:范围为:-10~10; volume:范围为:0~100; speektext:待转换声音的文字public void SpeechVideo_Read(int rate, int volume, string speektext){speech.Rate = rate;speech.Volume = volume;speech.SpeakAsync(speektext);}// OPC异步写数据private void WBtn_Click(object sender, RoutedEventArgs e){Array AsycWr_Value;Array SerHandles;object[] tempWrData = new object[3];//写入的数据必须是object类型的int[] tempSerHandles = new int[3];//将输入的数据赋给数组,然后在转成Array给AsycWr_Value、tempWrData[1] = (object)WriteText.Text;tempWrData[2] = (object)WriteText.Text;AsycWr_Value = (Array)tempWrData;//将输入数据的Item对于服务器句柄赋给数据,然后转成Array类型给SerHandles tempSerHandles[1] = Convert.ToInt32(sHandles.GetValue(1));tempSerHandles[2] = Convert.ToInt32(sHandles.GetValue(2));SerHandles = (Array)tempSerHandles;try{Group.AsyncWrite(2, ref SerHandles, ref AsycWr_Value, out Errors_Wr, TransactionID, outCancleID);}catch (Exception e1){ShowMessage(e1.ToString());}}//OPC成功写入数据提示private void Group_AsyncWriteComplete(int TransactionID, int NumItems, ref Array ClientHandles, ref Array Errors){ShowMessage("数据写入成功!");}}}。
最全的ABB机器人程序指令解读
最全的ABB机器人程序指令解读一、程序储存器(Programmemory)的组成:应用程序(Program)系统模块(Systemmodules)机器人程序储存器中,只允许存在一个主程序;所有例行程序与数据无论存在于哪个模块,全部被系统共享;所有例行程序与数据除特殊定义外,名称必须是唯一的。
1、应用程序(Program)的组成:主模块(Mainmodule)主程序(Mainroutine)程序数据(Programdata)例行程序(Routines)程序模块(Programmodules)程序数据(Programdata)例行程序(Routines)2、系统模块(Systemmodules)的组成:系统数据(Systemdata)例行程序(Routines)所有ABB机器人都自带两个系统模块,USER模块与BASE模块,根据机器人应用不同,有些机器人会配备相应应用的系统模块。
建议不要对任何自动生成的系统模块进行修改。
二、编程窗口:1、菜单键File:1、 Open:打开一个现有文件。
(程序.prg或模块.mod)2、 New:新建一个程序。
3 、Saveprogram :存储更改后的现有程序。
4 、Saveprogramas:存储一个新程序。
5 、Print: 打印程序,现已经不使用。
6、 Preferences:定义用户化指令集。
7、 Checkprogram :检验程序,光标会提示错误。
8 、Close:在程序储存器中关闭程序。
9、 Savemodule :存储更改后的现有模块。
(只在Module窗口中存在)0、Savemoduleas : 存储一个新模块。
(只在Module窗口中存在)2、菜单键Edit:1、 Cut:剪切,可能会丢失指令或数据。
2 、Copy :复制。
3 、Paste :粘贴,将剪切或复制的指令或数据粘贴到相应位置。
4、 GotoTop:将光标移至顶端。
5、 GotoBottom :将光标移至底端。
ABB机器人程序指令汇总

ABB机器人程序指令汇总
一、IRProgram
1. IRProgram:使用此指令编程ABB机器人。
2. Instruction:此指令可以向机器人发送指令,包括按单次命令执行、循环执行、运动等。
3. ProgramLine:此指令设置机器人单次操作步骤的顺序,机器人按
此顺序执行指令。
4. Position:此指令确定机器人的实际位置,用来计算机器人的路
径或者运动距离。
5. Interpln:此指令用来控制机器人运动的过渡,比如采用加速度、减速度等。
6. Zonedheader:此指令定义机器人任务中的一些步骤,比如,给定
回归点、给定回归方向等。
7. Maskword:此指令用于设置机器人的安全模式,以防止机器人偏
离设定的轨迹和安全路径。
8. Stop:此指令用于控制机器人的停止。
9. Echo:此指令用于在编程过程中显示一段文字,方便开发人员从
错误中记录错误信息。
二、IRStep
2. Line:此指令可以定义任务中各个行动的顺序,机器人按此顺序
执行指令。
3. Move:此指令可以让机器人运动到指定位置。
4. Delay:此指令可以让机器人暂停其中一段时间,等待其中一种情况出现。
5. Add:此指令可用于给机器人添加各种参数,以完成不同的任务。
6. Subtract:此指令用于从机器人中减去参数,以完成任务。
ABB机器人常用指令总结

ABB机器人常用指令总结1. ProgramName:用户可以将编程的名称指定为ProgramName,该指令将定义当前编程的名称,例如,ProgramName=正在编程的程序名称示例。
2. Create: Create指令有三个补充部分,第一个部分是模式,要么用“INC”表示自动增量模式,要么用“TEACH”表示立体机械手模式,第二部分是程序号,第三部分是将要执行的程序号命令,例如,Create INC ProgramName 。
3. Add:当用户使用立体机械手模式编程时,使用Add相应指令添加新的点位,Add指令如下:Add [PointName] x y z a b c。
4. Move:用来控制机械手移动位置到目的位置,用户可以用下列指令定义移动方式:MoveJoint [Joint],MoveLin [Point],MoveCir [Point]和MoveComb。
5. End:当编程完成后,在程序的末尾应该编入End指令,一般结束一个程序的时候会回到原点,End指令有两个参数,第一个参数可以设置工具的坐标,设为“Work”;第二个参数可以设置用于到达home点的机械臂移动方式,设为“Joint”或“Lin”。
6. Speed:Speed指令可以用来控制机械臂运行的速度,在Speed指令中可以指定多个速度参数,例如,SpeedLin [velocity(m/s)], SpeedJoint [velocity(deg/s)]和SpeedTool [velocity (m/s)]。
7. Stop:当机械臂出现故障或在工作过程中又被迫暂停时,只要输入Stop指令就可以暂时停止机械臂的运行。
8. Wait:等待指令可以在机械臂完成某些指令之后,等待一定的时间后再继续执行下一个指令,单位是秒,例如,Wait 10 。
9. Comment: Comment指令用于在程序中添加任意的文本[1] 。
10. Manual: Manual指令用于退出自动模式,转入手动模式,在手动模式下,机械臂的运动受键盘,操作执行。
ABB变频器的型号
ABB变频器ACS800 、510、350、550ABB变频器ACS800标准规格:(通用型)● 相数,电压,频率:三相380V 50/60Hz●过载电流额定:额定输出电流的150%-1min●额定频率:50,60Hz●最高输出频率:参数设定可对应至500Hz相应型号:(1.5KW~110KW)ABB部分型号(一)ACS510 IP21系列变频器ACS510-01-03A3-4ACS510-01-04A1-4ACS510-01-05A6-4ACS510-01-07A2-4ACS510-01-09A4-4ACS510-01-012A-4ACS510-01-017A-4ACS510-01-025A-4ACS510-01-031A-4ACS510-01-038A-4ACS510-01-046A-4ACS510-01-045A-4ACS510-01-060A-4ACS510-01-072A-4ACS510-01-088A-4ACS510-01-096A-4ACS510-01-125A-4ACS510-01-124A-4ACS510-01-157A-4ACS510-01-180A-4ACS510-01-195A-4ACS510 IP54系列变频器ACS510-01-03A3-4+B055 ACS510-01-04A1-4+B055 ACS510-01-05A6-4+B055 ACS510-01-07A2-4+B055 ACS510-01-09A4-4+B055 ACS510-01-012A-4+B055 ACS510-01-017A-4+B055 ACS510-01-025A-4+B055 ACS510-01-031A-4+B055 ACS510-01-038A-4+B055 ACS510-01-046A-4+B055 ACS510-01-045A-4+B055 ACS510-01-060A-4+B055 ACS510-01-072A-4+B055 ACS510-01-088A-4+B055 ACS510-01-096A-4+B055 ACS510-01-125A-4+B055 ACS510-01-124A-4+B055 ACS510-01-157A-4+B055 ACS510-01-180A-4+B055ACS550 IP21系列变频器ACS550-01-03A3-4ACS550-01-04A1-4ACS550-01-05A4-4ACS550-01-06A9-4ACS550-01-08A8-4ACS550-01-012A-4ACS550-01-015A-4ACS550-01-023A-4ACS550-01-031A-4ACS550-01-038A-4ACS550-01-045A-4ACS550-01-044A-4ACS550-01-059A-4ACS550-01-072A-4ACS550-01-087A-4ACS550-01-096A-4ACS550-01-125A-4ACS550-01-124A-4ACS550-01-157A-4ACS550-01-180A-4ACS550-01-195A-4ACS550 IP54系列变频器ACS550-01-03A3-4+B055 ACS550-01-04A1-4+B055 ACS550-01-05A4-4+B055 ACS550-01-06A9-4+B055 ACS550-01-08A8-4+B055 ACS550-01-012A-4+B055 ACS550-01-015A-4+B055 ACS550-01-023A-4+B055 ACS550-01-031A-4+B055 ACS550-01-038A-4+B055 ACS550-01-045A-4+B055 ACS550-01-044A-4+B055 ACS550-01-059A-4+B055 ACS550-01-072A-4+B055 ACS550-01-087A-4+B055 ACS550-01-096A-4+B055 ACS550-01-125A-4+B055 ACS550-01-124A-4+B055ACS550-01-180A-4+B055ACS550-01-195A-4+B055ABB电气传动系列介绍:ACS150 (标准袖珍型)相应型号:(0.37KW~4KW)ABB通用机械传动是专为机械制造行业所设计的。
iFIX - ABB CBM组态指南

1-J BABB AC800M 3.2与Intellution iFIX3.0组态指南曹卫锋2004/10/202-J B内容⏹介绍采用IFIX3.0作为ABB AC800M 控制系统的SCADA/HMI 软件的方案。
⏹介绍ABB OPC Server 的设置,关于CBM 的详细组态,请参考CBM 的培训课程。
⏹介绍iFIX 的OPC 配置和组态及如何实现快速批量组态。
⏹介绍iFIX 数据库组态及如何实现快速批量组态。
⏹介绍冗余服务器的设置。
3-JBAC800M/iFIX方案4-J B为什么选择OPC 作为通讯接口⏹不再需要任何驱动,即插即用,真正解决了客户在使用多种不同厂家的产品时的兼容性和互操作性问题。
⏹多个客户端可以同时和多个服务器通讯。
⏹高速性能,Server 和Client 之间的通讯速度可达20000Tags/s 。
⏹ABB AC800M 控制系统提供完善的OPC 通讯方案,跟多种HMI/SCADA 软件有大量成功的案例,如iFIX ,Intouch ,Citect等。
5-J BIndustrialIT AC800M OPC 解决方案⏹ABB 提供标准的2.0版本的OPC DA 和AE 服务器,供各种OPC 客户端访问。
⏹OPC Data Access Server 从AC800M/C 控制器采集数据,供OPC Client 访问。
⏹OPC Alarm and Event Server 提供报警和事件的OPC Server,供OPC Alarm&Event Client 访问。
对于大部分的HMI/SCADA 软件的事件和报警均在上位软件中实现,但在某些特殊情况下,比如电厂的SOE ,事件必须控制器中产生,然后通过OPC AE Server 供Client 访问。
6-J BIFIX OPC 解决方案⏹IFIX PDB OPC Client 软件名称OPC Power Tool,又称为OPC Client Driver ,既作为OPC 客户端连接第三方OPC Server,又作为第三方OPC Client 连接PDB 的中间OPC Server,产品包含在I/O Driver & OPC Server CD 中。
ABB Steel CityMD RPT8 嵌入式服务槽盒文件说明书

—© Droits d’auteur 2019 ABB. Tous droits réservés. Spécifications sujettes à changement sans préavis.—ABB Produits d’installation ltée Secteur d’électrification 700, avenue ThomasSaint-Jean-sur-Richelieu, Québec J2X 2M9Tél.: +1 (450) 347 5318Sans frais: +1 (800) 362 2952Fax: +1 (450) 347 1976—G U I DE DE PRODU ITBoîte de sol encastrée pour service dissimulé Steel City MD RPT8Boîte encastrée à 5 groupes et à service dissimulé, conçuepour les trous de 8 po (203 mm) au deuxième étage (ou plus haut) de bâtiments commerciaux. En raison des limites sur le nombre de trous qui peuvent être percés dans un plancher, il est important de maximiser la capacité de chaque emplacement. La série RPT8 offre une solutionconfigurable qui fournit une capacité élevée pour les fils d’alimentation ainsi que le câblage de communication, dans un seul emplacement de foret aléseur.Caractéristiques et avantagesBoîte de sol, couvercle, couvercle temporaire ou d’abandon, ensemble pour adaptateurs d’appareils et ensemble pour boîte de jonction supplémentaire• Capacité accrue par rapport aux boîtes encastrées à alésage de 3 po, 4 po et 6 po (76 mm, 102 mm et 152 mm) typiques• Compartiment central conçu pour 20, 30 ou 50 A (exclu-sif à ABB, le compartiment central est conçu pour les dis-positifs de 50 A*)• Taille du foret aléseur : 8 po (203 mm)• Ouverture du couvercle sans outil. Le couvercle pivote sur 180° vers la position en cours d’utilisation. Aucune charnière qui pourrait se briser sur le plan mécanique • Fini noir, en laiton massif, en aluminium brossé ou en nickel satiné (NOUVEAU) qui offre une durabilité et une apparence supérieures• Le client peut utiliser des dispositifs de câblage ordinaire • Le compartiment central prend en charge les DDFT et les dispositifs Twist-Lock• Service en retrait qui dissimule les dispositifs au-dessous du sol• Le compartiment du bas peut être configuré comme source d’alimentation d’urgence séparée• La boîte de jonction dans le compartiment du bas estconfigurable et comprend un couvercle avec débouchures de 1¼ po, 1½ po ou 2 po (32 mm, 38 mm ou 51 mm)• Conforme aux essais au feu de deux heures UL 263• Conforme à UL 514A / CSA C22.2 no 18.1 pour les eaux de nettoyage* Veuillez communiquer avec notre service de soutien technique pour une liste des dispositifs de 50 A qui peuvent être installés dans le compartiment central7T K K 000619—01 Noir—02 Laiton—03 Nickel satiné—04 Aluminium brossé。
ABB指令集及作用

ABB指令集及作用ABB指令集是ABB机器人控制系统中使用的一组命令,用于控制机器人的运动、工具操作和通信等功能。
这些指令是通过编程方式输入到机器人控制器中,从而实现对机器人的精确控制和操作。
ABB指令集包括多种类型的指令,如位置指令、速度指令、IO指令、逻辑指令等,每种指令都有特定的作用和用途,在不同的应用场景下可以实现各种不同的功能。
1.位置指令:位置指令用于控制机器人末端执行器的位置,包括绝对位置和相对位置控制。
绝对位置指令将机器人的末端执行器移动到指定的坐标位置,而相对位置指令则是相对于当前位置进行移动。
这些指令可以通过指定坐标轴位置或者关节角度来控制机器人的运动,实现精确的位置控制。
2.速度指令:速度指令用于控制机器人的移动速度,包括线速度和角速度控制。
通过设置不同的速度参数,可以确保机器人在执行任务时以合适的速度移动,从而提高工作效率和安全性。
3.IO指令:IO指令用于控制机器人与外部设备的通信和数据传输。
通过IO指令,机器人可以读取和写入外部设备的输入输出信号,实现与其他设备的数据交换和控制。
4.逻辑指令:逻辑指令用于控制机器人的逻辑运算和条件判断。
通过逻辑指令,可以实现对机器人运动和操作的逻辑控制,使机器人能够根据不同的条件执行相应的操作,提高自动化生产线的智能化程度。
5.复位指令:复位指令用于将机器人的控制系统恢复到初始状态,清除所有错误和警告信息,保证机器人的正常运行。
复位指令可以在机器人出现故障时使用,帮助用户快速排除故障并重新启动机器人。
总的来说,ABB指令集提供了丰富的功能和灵活的控制方式,可以满足各种不同的工业应用需求。
通过合理地组合和应用这些指令,用户可以实现对机器人的精确控制和高效运作,提高生产效率、降低成本和增强竞争力。
ABB指令集在工业自动化领域拥有广泛应用,帮助用户实现智能制造和数字化转型,推动工业4.0的发展进程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
额定电压 Un : 690V
CLMD13/10 KVAR 690V 50Hz CLMD43/15 KVAR 690V 50Hz CLMD43/20 KVAR 690V 50Hz CLMD43/25 KVAR 690V 50Hz CLMD43/30 KVAR 690V 50Hz CLMD53/40 KVAR 690V 50Hz CLMD53/45 KVAR 690V 50Hz CLMD53/50 KVAR 690V 50Hz 10 15 20 25 30 35 40 45 50 50 60 70
CLMD83 CLMD13 CLMD43
额定电压 Un : 525V
CLMD13/10 KVAR 525V 50Hz CLMD43/20 KVAR 525V 50Hz CLMD43/25 KVAR 525V 50Hz CLMD43/30 KVAR 525V 50Hz CLMD53/35 KVAR 525V 50Hz CLMD53/40 KVAR 525V 50Hz CLMD53/50 KVAR 525V 50Hz CLMD63/50 KVAR 525V 50Hz CLMD63/60 KVAR 525V 50Hz CLMD63/70 KVAR 525V 50Hz
注:若需星形(不带中性线)连接方式的电容器, 请与 ABB 低压部联系。
L1 L2 L3
模块化的系列 - CLMD 13
CLMD13 的设计是让用户很容易地将各个电容器单元并联起来。 CLMD13 的基本单元非常适合用于模块化的体系。
紧凑式的系列 - CLMD 33
CLMD33 是专业电容组设计的。它体积小。可以提供高能量的电能。 (此系列不包含放电电阻)。
一个完整的系列 - CLMD 43, 53,63 及 83
CLMD 电容器单元的设计是在一种坚固和紧凑的方式中, 为用户提供极高的可靠性、安全性和卓越的性能以及电能。
型号说明
CLMD 43 / 30KVAR 400V 50HZ(Y+N)
Y+N(星形连接+中性线)
L1 L2 L3 N
1PH(单相连接)
颜色 固定位
执行 防护等级 高环境温度 最低环境温度
CLMD 43,53,63 及 83
装置之间的 最短距离 装置和墙体之间 的最短距离 损耗 (包括放电电阻) 电容允差 电压测试
按 IEC 831-1 和 2 规定的容许 过载能力
注:电容器安装到由谐波影响的电网中时要特别注意,特别是有谐振危险时。
CLMD53
Δ
CLMD63
三相分补电容器 (星形电容器) — 400V / 440V
额定电压 Un : 400V 型号
CLMD13/7.5 KVAR 400V 50Hz (Y+N) CLMD43/15 KVAR 400V 50Hz (Y+N) CLMD53/30 KVAR 400V 50Hz (Y+N)
额定电压 Un : 480V
CLMD43/25 KVAR 480V 50Hz CLMD53/30 KVAR 480V 50Hz CLMD53/40 KVAR 480V 50Hz CLMD53/45 KVAR 480V 50Hz CLMD53/50 KVAR 480V 50Hz CLMD63/60 KVAR 480V 50Hz CLMD63/65 KVAR 480V 50Hz CLMD63/70 KVAR 480V 50Hz CLMD63/75 KVAR 480V 50Hz CLMD63/80 KVAR 480V 50Hz CLMD83/100KVAR 480V 50Hz
1 低压电容器 / 低压电抗器
低压电容器 - CLMD
产品概述和型号说明
产品概述
电容器 连接方式 △(三角形连接) 连接方式 省略 :Delta 三角形连接(三相) Y+N :星形 + 中性线(三相) (适用于混补方式) 1PH :单相 频率 50 或 60Hz 电压 220-1000V AC 电容器容量 外形规格 13,33,43,53,63,83
干式设计 CLMD 具有乾性的介电质,因此不会有任何液体泄漏和造成环 境污染的危险。 非常低的损耗 介电质的损耗低于 0.2W/kvar 。总损耗包括放电电阻是低于 0.5/kvar。 使用寿命长,有自恢复功能 当在电容的介电质中出现故障时,故障周围的金属电极会立刻 蒸发掉,由此将故障隔离开。然后电容可以继续正常工作。
型号 额定电压 Un : 440V
CLMD13/10 KVAR 440V 50Hz CLMD13/12.5 KVAR 440V 50Hz CLMD13/15 KVAR 440V 50Hz CLMD43/20 KVAR 440V 50Hz CLMD43/25 KVAR 440V 50Hz CLMD43/30 KVAR 440V 50Hz CLMD53/35 KVAR 440V 50Hz CLMD53/40 KVAR 440V 50Hz CLMD53/50 KVAR 440V 50Hz CLMD63/60 KVAR 440V 50Hz CLMD63/80 KVAR 440V 50Hz CLMD83/100 KVAR 440V 50Hz
技术资料
电能质量产品 低压电容器 - CLMD 低压电抗器
低压电容器 - CLMD
产品概述
让功率因数修正更具可靠性
CLMD 的构造
电容器
■
可靠、安全
坚固的端子,容易连接 开孔片 接地端子 放电电阻 金属外壳(可提供户外安装) 自愈
CLMD 电容器采用经过金属化处理的聚丙烯薄膜作为电介质 卷绕而成。这些干性绕组带有一种次序分断装置,它可以确 保每一个元件在寿命终期能够可靠地、有选择地与电路分断 开。
L N
低压电容器 / 低压电抗器
2
低压电容器 - CLMD
技术资料
电压范围 电容器 频率 连接 放电电阻
220 - 1000V 50 和 60Hz 3 相连接是标准连接方式(单相连接需特别注明) 内置放电电阻永久性连接,确保电容安全放电,电压在关断之后 1 分 钟内达到低于 50V(CLMD33 不包含有放电电阻) - CLMD13 : 三个 M6 端子 - CLMD33 : 三个电缆输出 - CLMD43 - 53 - 63 - 83 : 根据电容器的功率,带螺杆 M6,8,10 或 12 CLMD13 - 33 : 在外壳固定外接地 CLMD43 - 53 - 63 - 83 : 在外壳底下的 M8 端子 通过开孔:CLMD13 : 22.5mm CLMD33 - 43 - 53 : 37mm CLMD63 - 83 : 47mm
电线连接 金属头枝状物 金属化聚丙烯薄膜 第二层箔片绕组
双轴线定位聚丙烯介电质 防火 在 CLMD 电容器中的所有元件都被蛭石所包围著。这是一种无 热固性封装材料 保险丝 塑料外壳
机的、惰性的、防火的,以及无毒的颗粒状物质。当发现故障 时,蛭石会安全地吸收掉产生于电容内部的能量,并熄灭掉任 何可能出现的火苗。
相数
3
接线方式
Y+N
单相补偿电容器 — 230V / 250V
额定电压 Un : 230V 型号
CLMD13/2.5 KVAR 230V (1 PH) CLMD13/5 KVAR 230V (1 PH) CLMD43/10 KVAR 230V (1 PH)
额定电压 Un : 250V 型号
CLMD13/2.5 KVAR 250V (1 PH) CLMD13/5 KVAR 250V (1 PH) CLMD43/10 KVAR 250V (1 PH)
CLMD 13
端子
接地
电缆输出
箱体的材料
CLMD 33
镀锌钢板 杏色 RAL 7032 - CLMD13 : 有两个卡槽,直径 6.5mm (适合安装模块化的组件) - CLMD33 : 有 8 个固定孔,直径 5.4mm - CLMD43 - 53 - 63 - 83 : 有两个 26 X 12mm 的卡槽 户内(户外,可按要求) IP 42 (IP 54,可按要求) "D" 类别(+ 55 ℃)根据 IEC 60831 - 户内型 :-25 ℃ - 户外型 :-40 ℃ - CLMD13 - 33 : 20mm - CLMD43 - 53 - 63 - 83 : 50mm - CLMD13 - 33 : 20mm - CLMD43 - 53 - 63 - 83 : 50mm 在 380V 及以上额定电压时,小于 0.5 Watt/kvar - 0% + 10% :2.15Un 持续 10 秒 - 在端子之间 - 在端子和地面之间:3kV 持续 10 秒 - 过电压允差:断续,最大 10% - 过电流允差:持续,30% - 最大过载 :稳定工作在 135% 时的额定电流(由过电压和谐波产生的)
ISO 9001 已通过了 ISO 9001 质量体系认证,完全确保产品的质量。 ISO 14001
不易破损 优越的峰值电流处理能力 具有高度稳定性电容 最佳的自愈设计 长久的使用寿命
C L M D 电容使用干式介电质,没有任何液体。它的设计让 CLMD 生产过程十分环保。我们的 ISO 14001 认证足以证明我 们对环保的承诺。
额定容量1)(KVAR)
2.5 5 10
外形规格
CLMD13 CLMD43
相数
1
接线方式
1 PH
1) 额定容量指额定电压下的输出功率 注 : CLMD可自由组合,更多型号规格请咨询ABB。 低压电容器 / 低压电抗器 4
额定容量1)(KVAR)
10 12.5 15 20 25 30 35 40 50 60 80 100 25 30 40 45 50 60 65 70 75 80 100
外形规格
相数
接线方式 电容器
CLMD13