射电望远镜馈源支撑系统索力特性研究.pdf
大射电望远镜馈源支撑与指向跟踪系统的力学模型分析及实验研究

大射电望远镜馈源支撑与指向跟踪系统的力学模型分析及实验研究大射电望远镜馈源支撑与指向跟踪系统的力学模型分析及实验研究摘要:大射电望远镜的馈源支撑与指向跟踪系统对于望远镜的安装定位和信号捕捉至关重要。
本文通过对大射电望远镜的力学模型进行分析,并进行了实验研究,从而对于馈源支撑与指向跟踪系统的优化提出了一些建议。
1. 引言大射电望远镜作为研究宇宙天体的重要工具,其馈源支撑与指向跟踪系统的性能对于望远镜的观测质量,解析度和精度都具有重要影响。
因此,对于馈源支撑与指向跟踪系统的力学模型进行分析和实验研究具有重要意义。
2. 馈源支撑系统的力学模型分析馈源支撑系统是指望远镜的接收器或发射器与天线之间的连接机构,它能够支撑天线并提供合适的位置和姿态。
我们通过建立馈源支撑系统的力学模型,分析系统的刚度和稳定性,可以优化馈源的位置和天线的姿态。
首先,我们需要建立馈源支撑系统的刚度模型,包括各个支撑点的刚度和连接结构的刚度。
通过测量各个支撑点的刚度参数和连接结构的刚度参数,我们可以计算出系统的总刚度。
然后,我们可以利用该刚度模型分析系统的稳定性,即系统在受到外力或振动的作用下是否具有足够的稳定性,从而保证天线的稳定性。
其次,我们可以利用馈源支撑系统的力学模型分析系统的振动特性。
通过测量系统的谐振频率和振动模态,我们可以了解系统在不同频率下的振动特性,并优化系统的结构设计以减小振动对天线精度的影响。
3. 指向跟踪系统的力学模型分析指向跟踪系统是指望远镜通过控制器控制天线的转动达到对目标信号的准确跟踪。
我们可以通过建立指向跟踪系统的力学模型来分析系统的精度和稳定性,从而优化跟踪的性能。
首先,我们需要建立指向跟踪系统的精度模型,包括控制器的精度和传动装置的精度。
通过测量控制器的精度参数和传动装置的误差参数,我们可以计算出系统的总精度。
然后,我们可以通过该精度模型分析系统的稳定性,即控制器在不同情况下是否可以保持目标信号的准确跟踪,从而保证望远镜的观测质量。
大射电望远镜馈源支撑系统建模与仿真

大射电望远镜馈源支撑系统建模与仿真缪岭,刘玉标(中国科学院力学研究所,北京100190)1引言根据射电天文学发展需要,我国决定利用贵州喀斯特洼地,建设500m 口径球面射电望远镜(Five-hundred-meter Aperture Spherical Telescope ,简称FAST ),建成后FAST 将是世界上最大的单天线射电望远镜,对我国天文学的发展具有重要的意义[1]。
针对如此巨大口径的现实情况,对馈源支撑系统,FAST 采用了一种全新的光机电一体化的创新设计方案[2]。
此设计方案先通过大跨度的悬索对馈源舱进行粗调,然后在馈源舱内采用Stewart 机构进行二次精调,并实时通过激光检测装置检测接收装置的具体位置,与主动反射面配合,反馈给计算机处理进行闭环控制。
由于以往对此工程的机构动力分析一般都建立在有限元的基础上,无法对系统整体进行拖动的实际仿真计算,因此根据上述设计方案,采用多体动力学分析软件MSC .Adams 建立了馈源支撑系统的机械模型及风载模型,并分析了其关键点的响应情况。
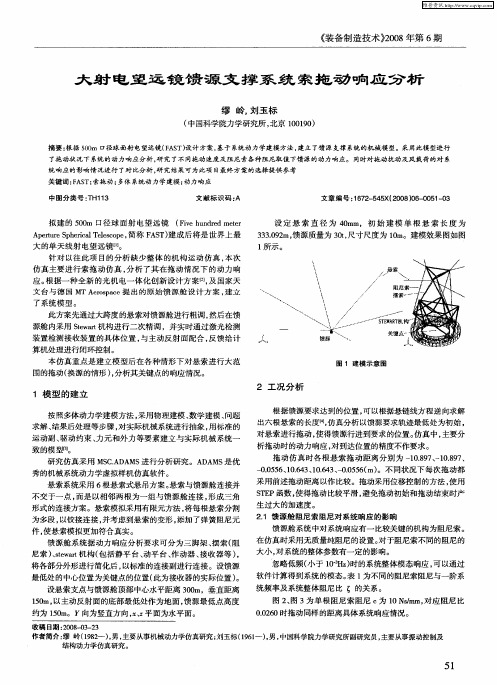
2模型的建立按照多体动力学建模方法,对实际机械系统进行抽象,用标准的运动副、驱动约束、力元和外力等要素建立与实际机械系统一致的模型[3]。
悬索系统采用6悬索式悬吊方案。
悬索与馈源舱连接并不交于同一处,而是以相邻两根为一组与馈源舱连接,形成三角形式的连接方案。
悬索模拟采用有限元的方法,将每根悬索分割为多段,以铰接连接,并考虑到悬索的变形,添加了弹簧阻尼元件,使悬索模拟更加符合真实。
馈源舱系统根据分析要求可以分为四部分,分别为三脚架、摆索(阻尼索)、位置器及Stewart 平台,将各部分外形进行简化后,以标准的连接副进行连接。
设S 平台下端动平台中心位置为关键点的位置(此处也为接收器的实际位置)。
设定悬索支点与馈源舱顶部中心水平距离300m ,垂直距离150m ,以主动反射面的底部最低处作为地面,馈源最低点高度约为150m 。
大射电望远镜馈源支撑系统索拖动响应分析
/ L
馈 \、 源 、
图 1 建 模 示 意 图
1模 型 的建 立
按 照多体动力学建模方法 , 采用物理建模 、 数学建模 、 问题
2 工况 分析
根据馈源要求 达到的位置 , 以根据悬链线方程逆 向求解 可 出六根悬索的长度[ 仿真分析以馈源要求 轨迹最低处 为初始 , 4 1 ,
51
维普资讯
了拖 动状 况下系统 的动 力响应 分析 , 究了不同拖 动速度及 阻尼 索各种 阻尼取值 下馈 源的动力响应。同时对拖 动扰动及 风栽荷 的对 系 研 统 响应的影响情 况进行 了对 比分析 , 究结果 可为此项 目最终 方案的选择提供参考 研 关键词 :AS 索拖动 ; F T; 多体 系统动力学建模 ; 动力响应 中图分类号 : 1 3 TH 1 文献标 识码 : A 文章 编号 :6 2 5 5 2 0 0 — 0 1 0 1 7 — 4 X( 0 8)6 0 5 — 3
维普资讯
《 装备制造技术)0 8 2 0 年第 6 期
大 射 电 望 远 镜 馈 源 支 撑 系 统 索 拖 动 响 应 分 析
缪 岭 , 玉标 刘
( 中国科学 院力学研究所 , 北京 10 9 ) 0 10
摘要 : 根据 5 0 口径球 面射 电望远镜( A T) om F S  ̄计方案 , 于系统动力 学建模方 法, 基 建立 了馈 源支撑 系统 的机械模型。采 用此模 型进行
一
研究仿 真采 用 MS .D MS进行分析研究。A A CA A D MS是优 秀的机械 系统动力学虚拟样机仿真软件 。 悬索系统采用 6根悬索式悬 吊方案 。 悬索与馈源舱连接并 不 交于一点 , 而是 以相邻两 根为一组 与馈 源舱连接 , 形成 三角 形式 的连接方案 。悬索模拟采用有 限元方法 , 每根悬索 分割 将 为多段 , 以铰接连接 , 并考虑到悬索 的变形 , 添加 了弹簧 阻尼元
FAST馈源支撑系统位姿分配方法研究

FAST馈源支撑系统位姿分配方法研究邓赛;景奉水;梁自泽;杨国栋;于东俊【摘要】为实现五百米口径球面射电望远镜(Five-hundred meter Aperture Spherical radio Telescope,FAST)馈源支撑系统馈源终端的高精度轨迹跟踪及防止馈源支撑索力超限,研究了馈源支撑系统星形框架和AB轴机构对目标终端位姿的分配算法.首先,根据馈源支撑系统机构特征,综合馈源舱的重心时变及其采用的回照策略,建立了带有馈源舱回照策略的考虑馈源舱重心时变的悬索牵引并联系统力学模型.然后,为解决AB轴机构与星形框架间的运动耦合问题,设计了两种馈源支撑系统位姿分配算法:优先保障六索索力均衡的位姿分配算法和优先保障馈源接收终端定位精度的位姿分配算法.最后,通过仿真对两种算法在馈源终端定位精度和索力分布情况两个方面的性能进行分析.仿真结果表明:前一算法能使六索索力分配均匀,但是引入了最大1.2°的馈源接收终端指向误差,已超出工程指向精度范围.后一算法的六索索力波动较大,但索力没超限或虚牵,能保证馈源接收终端的位姿,此算法满足工程需求.%In order to achieve high-accuracy trajectory tracking at feed end of Five-hundred meter Aperture Spherical radio Telescope (FAST) support system and to prevent the force over-limit of supporting cables,the pose distribution algorithms of target end by the star-frame of feed support system and A-B rotator were studied in the article.Firstly,according to the mechanism characteristic of the feed support system,combining the time-varying barycenter and the back illuminating strategy applied in feed cabin,a mechanical model of cable-driven parallel system which considers the time-varying barycenter of feed cabin and provided with back illuminating strategy was established.Secondly,in order to solve the motioncoupling between the A-B rotator and the star-frame,two pose distribution algorithms of the feed support system were designed:the pose distribution algorithm which gives priority on ensuring the balanced cable force of six-cable and the pose distribution algorithm which gives priority on ensuring the positioning accuracy of the feed receiver.Finally the performance of above two algorithms on positioning accuracy of the feed receiver and the distribution of cable force were analyzed.And the results show that the former algorithm is able to balance the cable force on six-cable,however the error due to introduction of maximum 1.2° of the feed receiver has been beyond the scope of the specified accuracy of the project.The second algorithm makes cable force on six-cable fluctuate significantly,but the force was not over the limit or under virtual pull,which means such algorithm meets engineering requirements because it can ensure the pose of the feed receiver.【期刊名称】《光学精密工程》【年(卷),期】2017(025)002【总页数】10页(P375-384)【关键词】FAST;射电望远镜;位姿分配;重心时变;回照【作者】邓赛;景奉水;梁自泽;杨国栋;于东俊【作者单位】中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院大学,北京100049;中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院大学,北京100049;中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院大学,北京100049;中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院国家天文台,北京100012【正文语种】中文【中图分类】TP394.1;TH691.9500 m口径球面射电望远镜(FAST)是在建的国际上最大、最灵敏的单口射电望远镜[1- 3]。
500m口径球面射电望远镜柔性馈源支撑系统仿真

计 算 机 辅 助 工 程
Co utrAie gne rn mp e d d En i e i g
V0 . 0 No 1 12 .
Ma.2 r 011
文 章 编 号 :06—07 (0 1 o .16 o 10 8 1 2 1 ) tO0 一7
c n r lag rt m r e in d a d t e vrua r tt p s b l.Th i e tc o to lo h a e d sg e n h i lp o oy e i ui i t t e k n mais,d n mis a d c nto y a c n o rl a c rc ft e s se u d rt e d su b n e r n l z d.Th i i l t n i cu e h y a c c u a y o h y t m n e h it r a c s a e a ay e e ma n smu ai n ld s t e d n mis o a ay i n c b n c b e s s e i n s se a h o to i a in a ay i n oh r me ha ims a d n lss o a i — a l u p nso y tm nd t e c nr l smult n l ss o t e c n s n o u is n t.Th o me s i lme td b i i l me tmeh d,a d t e lte s i e n e y mu b d e f r ri mp e n e y fnt ee n to e n h at ri mplme td b hi o y s se d n mis y tm y a c me h to i c n r1 Th b te e i n p i z t n c e c n e c iv d b t e c a r nc o to . e etr d sg o tmiai s h me a b a h e e y h o
大射电望远镜馈源的主动减振控制系统
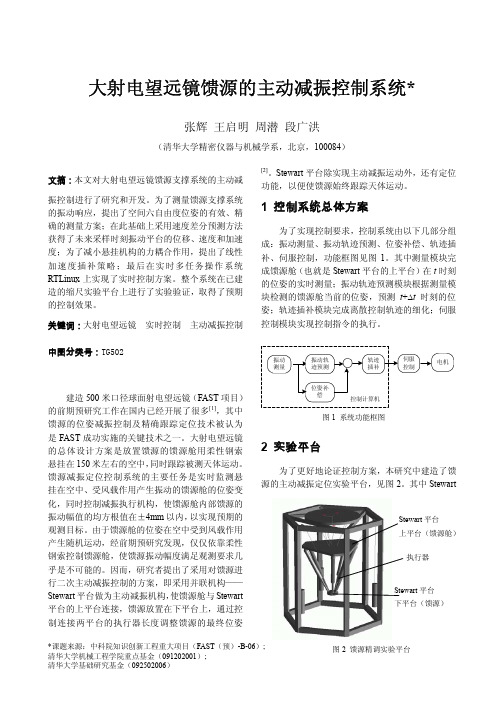
*课题来源:中科院知识创新工程重大项目(FAST (预)-B-06); 清华大学机械工程学院重点基金(091202001); 清华大学基础研究基金(092502006)大射电望远镜馈源的主动减振控制系统*张辉 王启明 周潜 段广洪(清华大学精密仪器与机械学系,北京,100084)文摘:本文对大射电望远镜馈源支撑系统的主动减振控制进行了研究和开发。
为了测量馈源支撑系统的振动响应,提出了空间六自由度位姿的有效、精确的测量方案;在此基础上采用速度差分预测方法获得了未来采样时刻振动平台的位移、速度和加速度;为了减小悬挂机构的力耦合作用,提出了线性加速度插补策略;最后在实时多任务操作系统RTLinux 上实现了实时控制方案。
整个系统在已建造的缩尺实验平台上进行了实验验证,取得了预期的控制效果。
关键词:大射电望远镜 实时控制 主动减振控制 中图分类号:TG502建造500米口径球面射电望远镜(FAST 项目)的前期预研究工作在国内已经开展了很多[1],其中馈源的位姿减振控制及精确跟踪定位技术被认为是FAST 成功实施的关键技术之一。
大射电望远镜的总体设计方案是放置馈源的馈源舱用柔性钢索悬挂在150米左右的空中,同时跟踪被测天体运动。
馈源减振定位控制系统的主要任务是实时监测悬挂在空中、受风载作用产生振动的馈源舱的位姿变化,同时控制减振执行机构,使馈源舱内部馈源的振动幅值的均方根值在±4mm 以内,以实现预期的观测目标。
由于馈源舱的位姿在空中受到风载作用产生随机运动,经前期预研究发现,仅仅依靠柔性钢索控制馈源舱,使馈源振动幅度满足观测要求几乎是不可能的。
因而,研究者提出了采用对馈源进行二次主动减振控制的方案,即采用并联机构——Stewart 平台做为主动减振机构,使馈源舱与Stewart 平台的上平台连接,馈源放置在下平台上,通过控制连接两平台的执行器长度调整馈源的最终位姿[2]。
Stewart 平台除实现主动减振运动外,还有定位功能,以便使馈源始终跟踪天体运动。
FAST工作动态-500米口径球面射电望远镜工程FAST工程-国家

FAST工作动态500米口径球面射电望远镜项目2015年10月第10期(总第93期)FAST圈梁及索网工程获“中国钢结构协会科学技术奖”特等奖2015年10月25日,中国钢结构协会组织召开了“中国钢结构协会2015年科学技术奖评审会议”,FAST圈梁及索网工程荣获最高奖项—“中国钢结构协会科学技术奖”特等奖。
中科院国家天文台FAST工程首席科学家南仁东为该奖项的第一主要完成人。
为了鼓励企业、科研院所、大专院校以及社会各界对钢结构领域的科技投入,增强钢结构行业的整体科技水平,奖励在推动我国钢结构领域科学技术进步中做出突出贡献的组织和个人,加快科学技术成果向生产力的转化,提高技术创新能力,受国家科学技术奖励办公室指导,中国钢结构协会设立了“中国钢结构协会科学技术奖”,是我国钢结构行业的最高荣誉奖,分为特等奖、一等奖、二等奖,每年评审一次。
FAST圈梁及索网工程是FAST工程的主体支承结构,其圈梁为500m口径的超大空间桁架结构,包含11m×5.5m的空间桁架式环梁和50根6.419m~50.419m高度不等的格构柱,环梁上的150个耳板连接索网,承受FAST运行过程中索网传来的动荷载;索网工程由6670根主索编织而成,并通过2225根下拉索与促动器相连,通过促动器的伸缩实现FAST反射面的主动变形,进而进行天文观测。
FAST索网是世界上跨度最大、精度最高的索网结构,也是世界上第一个采用变位工作方式的索网体系。
评审委员会认为FAST圈梁及索网工程总体技术处于国际领先水平,技术难度与深度大,促进了我国钢结构行业科技进步,取得了重大经济、社会效益,因此将该工程评为特等奖。
该奖的获得,是对FAST工程创新性与挑战性的一个认可,是天文设备研究领域与工程建设领域相互交叉、相互影响并共同进步的体现。
国家天文台和圈梁及索网工程的设计、施工、研究单位相关人员共同获得了该项荣誉。
图1 FAST圈梁工程图2 合拢后的索网FAST工程进展截至2015年10月底,已完成施工的工程有:台址开挖与治理工程、设备基础工程(圈梁基础、地锚基础、塔基础以及索驱动基础等)、供水工程、圈梁制造和安装工程、馈源支撑塔制造和安装工程、索网制造和安装工程、舱停靠平台安装工程、液压促动器制造和安装工程。
大射电望远镜反射面全球面张拉索网体系静力分析

应力分布已 知; 初始状态形状已 知, 索 结构预
万方数据
S t r u c t u r a l E n g i n e e r s 2 0 0 4 ; ( 2 )
・ 结构分析・
应力 分布未知。目 前用于索网 结构的找 形方
长 度及预应力模态, 使得结构初始状态几何 参 数尽可能地满足设计规定值, 且索单元内 力在反射面模拟抛物面的时变过程中, 既不
松弛也不出现永久变形或拉断。由于 F A S T
反 射面结构工作状态下特殊的天文精度要 求, 加之其结构体系十分庞大, 使得该结构初 始状态的变形控制成为结构设计中的技术难 点和 重点以及控制因素。
p r e c i s i o n o f F A S T r e f l e c t o r . T a k i n g a c c o u n t t h e g e o m e t r i c n o n l i n e a r i t y , n o n l i n e a r f i n i t e
3 全球面张拉索网的找形分析
3 . 1预应力索网的分析技术和F A S 7 , 反射
面索网找的形特点 索网结构的分析方法与刚性结构不同, 刚性结构的 分析计算是在已知结构位形的基
础上 进行的, 而 柔性索网 结构, 首先需要施加 一 定的 预 应力使其具有一定的刚度, 才能成 为承 受外荷的结 构, 且在给 定的 边界条件下, 所施加预 应力的 分布和大小与 所形成的结构 初始形状密切相关[ 4 - 6 i 因此, 在结构承载 分析之前, 必须确定最为合理的预应力系统 及相应的初始结构形状。索网结构的 形状确
大射电望远镜馈源舱系统Stewart平台的技术研究
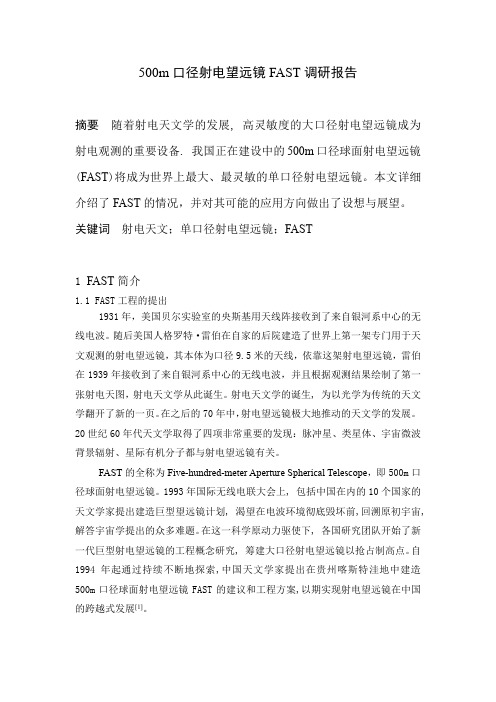
图 5 Stewart 平台结构组成
( 1) 上、下平台 上平台作为 Stewart 平台的支撑基础,向上通过 B 轴转轴与 AB 轴转环连接,向下通过虎克铰连接 6 根 相同的伸缩支腿。 下平台作为 Stewart 平台的执行部件,用以安装馈 源接收机、靶标支座以及绕自身旋转的多波束馈源转 盘。下平台通过球铰连接 6 根相同的伸缩支腿。 为了减轻重量,结合铰链分布、安装空间、结构刚 度等因素,上、下平台均采用桁架结构焊接而成。上平 台外形尺寸为 Φ 6 600 mm × 700 mm,重量约 2 500 kg,下平台外形尺寸为 Φ 4 200 mm × 800 mm,重量约 1 000 kg。 ( 2) 球铰、虎克铰 虎克铰( 图 6) 是连接伸缩支腿和上平台的构件, 具有 2 个旋转自由度,可以绕 X、Y 两轴旋转。虎克铰 以法兰形式与连接箱体相连,主要由摆动杆、摆动块和 底座 3 部分组成。摆动杆通过滚针轴承支承在摆动块 上,摆动块再通过滚针轴承支撑在底座上,两转轴摆角 分别可达 90°和 45°。
空间上有奇异点的限制,而且控制较为复杂。 FAST 望远镜的馈源接收机重量大、馈源舱空间有
限、调整范围相对较小,因此要求精调机构刚度高、重 量轻、结构紧凑、响应快速、定位精度高、可靠性高。
馈源舱悬索控制系统具有多变量、非线性、多体动 力学耦合等特点,为了达到理想的控制效果,必须尽量 减少各机构之间的耦合程度。Stewart 平台作为一种小 质量、大刚度、高精度的并联机构,其负载( 下平台 + 接 收机) 重量与馈源舱总重量之比接近 1∶ 10,有利于降低 耦合影响。Stewart 平台的 6 个驱动腿都是沿着长度方 向做伸缩运动,轴向力的测量和计算比较容易,可以准 确计算耦合影响。因此,采用 Stewart 平台实现馈源舱 的二级精调,能够充分发挥其优点而避免其不足。
大射电望远镜馈源舱支撑结构的减振与测量

大射电望远镜馈源舱支撑结构的减振与测量大射电望远镜馈源舱支撑结构的减振与测量射电望远镜是一种重要的天文观测设备,能够用来探测和研究宇宙中的电磁波辐射。
随着科技的进步,大射电望远镜成为了人们研究宇宙的重要工具之一。
大射电望远镜由多个重要组成部分构成,其中之一就是馈源舱。
馈源舱是大射电望远镜用来接收和发送射电信号的设备,其中包含了接收机、发射机以及馈源。
它的重要性体现在它能够提供清晰有效的信号传输,从而保证射电望远镜的准确观测。
然而,在馈源舱的运行过程中,会产生振动和共振现象,给信号的传输和观测造成一定的干扰。
为了降低馈源舱的振动,减小共振现象对信号传输的干扰,科研人员采用了一系列的振动减震措施。
首先,从结构上优化了馈源舱的支撑结构。
合理设计馈源舱的支撑结构,可以有效降低馈源舱的振动幅度。
其次,在馈源舱周围设置了一定数量的缓冲材料,用来吸收馈源舱产生的振动能量。
此外,还采用了地震减震技术,通过将馈源舱与地面隔离,减少地震对馈源舱的震动影响。
除了振动减震措施之外,科研人员还开展了馈源舱振动的测量工作。
通过测量馈源舱的振动特性,可以更好地了解馈源舱的动态响应,并对馈源舱的振动特性进行分析和优化。
常用的振动测量方法包括加速度测量法和位移测量法。
加速度测量法通过安装加速度传感器,实时测量馈源舱的加速度,进而反映馈源舱的振动状态。
位移测量法则是通过安装位移传感器,测量馈源舱的位移量,从而获得馈源舱的振动信息。
在馈源舱振动的测量中,还需要考虑其他因素的影响,如温度、湿度等。
这些因素都会对馈源舱的振动特性产生一定的影响。
因此,在进行振动测量时,需要严格控制环境参数,确保测量结果的准确性和可靠性。
综上所述,大射电望远镜馈源舱的振动控制和测量是一个复杂且具有挑战性的工作。
科研人员通过优化支撑结构、采用振动减震措施以及进行振动测量,不断努力降低馈源舱的振动幅度,提高信号传输的准确性和可靠性。
这些工作对于大射电望远镜的正常运行和精确观测起着重要的作用。
叩响机器人时代的大门——记合肥工业大学机械工程学院院长、机器人研究所所长訾斌

创新之路叩响机器人时代的大门——记合肥工业大学机械工程学院院长、机器人研究所所长訾斌 张方方 吴应清“到2025年,我国成为全球机器人技术创新策源地、高端制造集聚地和集成应用新高地;到2035年,我国机器人产业综合实力达到国际领先水平,机器人成为经济发展、人民生活、社会治理的重要组成。
”这是我国《“十四五”机器人产业发展规划》中明确提出的发展目标。
合肥工业大学机械工程学院院长、机器人研究所所长訾斌教授从事刚柔耦合智能机器人理论、技术与装备研究多年,他认为机器人技术正在深刻改变着人类的生产和生活方式,而随着机器人应用场景的持续拓展,机器人时代进程将被大大推进。
近年来,智能分拣、智能配送、智能搬运等大批“机器人快递员”问世;医疗机器人上岗范围从病房巡诊、康复训练、手术辅助拓展到智能消杀、核酸检测;水下仿生机器人正逐渐取代潜水员承担水文监测、目标搜救等任务;中国空间站机械臂惊艳全球……但机器人应用发展远不止如此,2023年1月,工信部等17部门印发的《“机器人+”应用行动实施方案》中明确指出,要面向社会民生改善和经济发展需求,遴选有一定基础、应用覆盖面广、辐射带动作用强的重点领域,聚焦典型应用场景和用户使用需求,开展从机器人产品研制、技术创新、场景应用到模式推广的系统推进工作,并支持一些新兴领域探索开展机器人应用。
“人类对机器人网络化、极端化、智能化、绿色化、共融化的期望值越来越高。
”訾斌说。
在他看来,“机器人+”应用前景广阔,要立足国家与经济社会的需求,抓住这个发展良机,方能不负时代。
从星河中走来“我们做科研要仰望星空,又要脚踏实地,在追寻梦想的同时不忘服务于国家需求。
”訾斌由衷地说。
他的科研之路正是从“仰望星空”开始的。
早在1995年,第三届国际大射电望远镜工作组会议上,西安电子科技大学段宝岩院士所做的关于大射电望远镜馈源支撑的光机电一体化创新报告,就受到了国内外专家的高度关注。
这个报告照进现实,扎扎实实地解决了中国天眼(FA S T)项目中最大的难点——馈源舱及其支撑结构系统问题,将天眼馈源舱的重量由万吨降低到30吨,被誉为“变革式创新”。
射电望远镜宽带高效率馈源的研究与应用

射电望远镜宽带高效率馈源的研究与应用射电望远镜宽带高效率馈源的研究与应用射电望远镜是人类窥探宇宙奥秘的重要工具之一,而馈源则是射电望远镜中至关重要的一个组成部分。
射电望远镜宽带高效率馈源的研究与应用,在射电天文学领域具有重要的意义。
本文将从射电望远镜馈源的概念出发,探讨射电望远镜宽带高效率馈源的研究进展以及其在实际应用中的重要作用。
馈源是射电望远镜系统中负责将天空中电磁波转换为电信号的关键部件。
它的性能 directly 影响到望远镜的灵敏度和分辨率。
传统的射电望远镜馈源通常采用窄频带馈源,而宽带馈源则能提供更大的信号捕捉范围,从而使得望远镜能接收到更多的天空信息。
因此,宽带馈源的研究和应用对于提高射电望远镜的性能至关重要。
在射电天文学中,高频率的电磁波通常携带更多的信息。
为了能够接收到更高频率的信号,宽带馈源需要具备较宽的工作频率范围。
而另一方面,高效率的馈源则能使得望远镜接收到更多的信号,并将其转化为有效的电信号。
因此,设计一个具备宽带和高效率的馈源,对于射电望远镜的发展具有重要意义。
在射电望远镜宽带高效率馈源的研究中,科学家们通过不断探索和创新,取得了一系列重要的进展。
例如,利用宽带高效率馈源,相比传统的窄频带馈源,望远镜能够接收到更多的电磁波信号,并将其转化为有效的电信号。
这样不仅提高了望远镜的灵敏度,也增加了其工作频率范围。
同时,科学家们还设计了一些具备高效率的馈源,它们能够减少信号能量的损失,提高能量的转换效率,从而增加望远镜接收到的信号量。
宽带高效率馈源在射电望远镜领域的应用也日益广泛。
比如,利用宽带高效率馈源,科学家们可以更准确地观察远处星系、宇宙起源等宇宙现象。
它们不仅可以提供更丰富的天空信息,也能为宇宙学家们提供更多的数据支持,从而推动射电天文学的发展。
此外,宽带高效率馈源还能够应用于射电干涉阵列的建设,使得干涉阵列更具有灵活性和高效性。
然而,射电望远镜宽带高效率馈源的研究与应用仍面临一些挑战和困难。
射电望远镜天线相控阵馈源技术研究

射电望远镜天线相控阵馈源技术研究射电望远镜天线相控阵馈源技术研究概述:射电望远镜是现代天文学中重要的观测工具,用于观测宇宙中的射电波。
天线是射电望远镜的核心组成部分,其性能直接关系到观测的精确性和灵敏度。
相控阵馈源技术是射电望远镜天线的一项重要研究内容,通过对馈源的精确控制,实现天线的高分辨率图像和宽带观测。
本文将从原理、应用以及发展前景等方面对射电望远镜天线相控阵馈源技术进行探讨。
一、相控阵馈源技术的原理相控阵馈源技术是基于天线内置的多个相控阵元,通过对每个阵元的相位和振幅进行精确调控,实现合成天线模式,从而控制天线的指向和增益。
该技术利用阵元之间的相干合成和干涉效应,通过快速调制相位和振幅,实现对天线的指向和捕获脉冲信号的控制。
二、相控阵馈源技术的应用1. 宽带观测:传统射电望远镜的频带较窄,无法同时观测多个频率的天体信号。
相控阵馈源技术可以通过相位调控,实现宽带观测,提高观测效率和精确性。
2. 即时成像:相控阵馈源技术可以实现实时的电子束会聚,在不同时间抽样下得到一系列的子阵输出。
通过合成这些子阵的输出信号,可以实现高分辨率的图像重建,从而实现即时成像。
3. 敏感度提升:传统射电望远镜的天线增益有限,无法捕获较为微弱的宇宙射电信号。
相控阵馈源技术可以通过相干合成增强阵列的增益,从而提高望远镜的灵敏度和探测能力。
三、相控阵馈源技术的挑战与发展前景1. 大规模阵列设计:实现相控阵馈源技术需要大规模的天线阵列,涉及到阵元的布局和阵元之间的相位和振幅调控。
如何有效设计大规模射电天线阵列,成为相控阵馈源技术需要面对的挑战之一。
2. 相位和振幅调控精度:相控阵馈源技术需要对每个阵元进行精确的相位和振幅调控,以实现合成天线模式。
如何提高相位和振幅调控的精度,是未来研究的重点。
3. 信号处理与算法优化:相控阵馈源技术产生的海量数据需要进行复杂的信号处理和图像重建算法。
如何优化算法,提高数据处理效率和图像重建质量,是相控阵馈源技术的研究热点。
反射镜机械结构挠性支撑方案的研究

反射镜机械结构挠性支撑方案的研究【摘要】对某型反射镜的支撑进行了研究,提出了单点挠性的概念,并对具体结构进行了细致的研究。
工程分析表明,这种支撑可以很好地保证了反射镜在静力学、热环境下镜面具有较高成像质量,而其支撑自身在一定的动态环境下不会破坏。
这种支撑结构不仅具有的静态、动态的尺寸稳定性,而且重量较轻,适合在重量要求较严的大视场空间遥感器中使用。
【关键词】光学反射镜;工程分析;尺寸稳定性小型空间遥感器由于其体积小、重量轻、安装简单的特点,在目前空间光学观测仪器中,仍扮演重要的角色,尤其是采用较大视场的小型空间遥感器更具有广阔的发展前途。
小型空间遥感器为了实现大视场,需要扩大反射镜的通光孔径,如采用推扫的工作模式,小型长条反射镜是很好的选择。
一方面它可以满足大市场的要求,另一方面可以实现重量较轻、体积较小的特点。
光学反射镜成像表面的面形精度(PV值和RMS值)是影响空间光学遥感器光学系统成像质量的关键因素(对于成像光学系统要求反射镜面型精度PV≤63.2nm,RMS≤12nm)。
在重力环境下反射镜容易受重力作用导致变形,而环境温度变化的环境下,镜面也会发生变形,这些变形会导致成像质量下降。
如何使反射镜在力学环境工况下满足面形设计指标要求的同时,在空间热环境工况下也能达到成像要求的面形精度,就需要对反射镜的支撑结构进行合理的设计。
本文对450mm×150mm长条反射镜的挠性支撑进行了研究,提出了单点挠性支撑,并对具体结构进行了细致的研究。
反射镜采用反应烧结SiC材料,以保证镜体自身刚度。
工程分析表明,这种支撑可以很好地保证了反射镜在静力学、热环境下镜面具有较高成像质量,而其支撑自身在一定的动态环境下不会破坏。
1.反射镜镜体结构设计及支撑方案的确定对于反射镜的支撑,采用三点支撑是最合理的手段,但对于细长条反射镜,三点支撑受面积的制约难以展开,由此,450mm×150mm长条反射镜拟采用单点支撑。
大射电望远镜馈源柔索支撑系统的建模与控制

大射电望远镜馈源柔索支撑系统的建模与控制
訾斌;段宝岩;黄进
【期刊名称】《西安交通大学学报》
【年(卷),期】2006(040)006
【摘要】根据柔索精确的悬链线解析表达式,推导出了两端固定时柔索初始长度与拉力之间的关系,从而能够精确而高效地获得柔索对两端节点的拉力,在此基础上应用牛顿-欧拉法建立了大射电望远镜馈源柔索支撑系统的动力学简化模型.针对该系统的非线性、慢时变、多变量耦合等特点,提出了一种带有自调整因子和比例积分校正环节的双模糊控制器来实现馈源轨迹跟踪.采用双模糊控制器对所建立的动力学模型进行了系统控制仿真实验.结果表明,该控制系统不仅能较好地跟踪期望信号,而且能满足馈源柔索支撑系统轨迹跟踪精度要求.
【总页数】5页(P681-685)
【作者】訾斌;段宝岩;黄进
【作者单位】西安电子科技大学机电工程学院,710049,西安;西安电子科技大学机电工程学院,710049,西安;西安电子科技大学机电工程学院,710049,西安
【正文语种】中文
【中图分类】TP273
【相关文献】
1.电流变液在大射电望远镜馈源支撑系统风振半主动控制中的应用 [J], 苏玉鑫;段宝岩;南仁东;彭勃
2.大射电望远镜馈源支撑系统建模与仿真 [J], 缪岭;刘玉标
3.大射电望远镜馈源支撑系统索拖动响应分析 [J], 缪岭;刘玉标
4.新一代大射电望远镜馈源舱索支撑系统的优化设计 [J], 崔传贞;段宝岩;仇原鹰
5.超大型天线馈源舱柔索支撑结构动力学分析与跟踪控制 [J], 訾斌;段宝岩;杜敬利因版权原因,仅展示原文概要,查看原文内容请购买。
射电望远镜FAST调研报告
500m口径射电望远镜FAST调研报告摘要随着射电天文学的发展, 高灵敏度的大口径射电望远镜成为射电观测的重要设备. 我国正在建设中的500m口径球面射电望远镜(FAST)将成为世界上最大、最灵敏的单口径射电望远镜。
本文详细介绍了FAST的情况,并对其可能的应用方向做出了设想与展望。
关键词射电天文;单口径射电望远镜;FAST1 FAST简介1.1 FAST工程的提出1931年,美国贝尔实验室的央斯基用天线阵接收到了来自银河系中心的无线电波。
随后美国人格罗特·雷伯在自家的后院建造了世界上第一架专门用于天文观测的射电望远镜,其本体为口径9.5米的天线,依靠这架射电望远镜,雷伯在1939年接收到了来自银河系中心的无线电波,并且根据观测结果绘制了第一张射电天图,射电天文学从此诞生。
射电天文学的诞生, 为以光学为传统的天文学翻开了新的一页。
在之后的70年中,射电望远镜极大地推动的天文学的发展。
20世纪60年代天文学取得了四项非常重要的发现:脉冲星、类星体、宇宙微波背景辐射、星际有机分子都与射电望远镜有关。
FAST的全称为Five-hundred-meter Aperture Spherical Telescope,即500m口径球面射电望远镜。
1993年国际无线电联大会上, 包括中国在内的10个国家的天文学家提出建造巨型望远镜计划, 渴望在电波环境彻底毁坏前,回溯原初宇宙, 解答宇宙学提出的众多难题。
在这一科学原动力驱使下, 各国研究团队开始了新一代巨型射电望远镜的工程概念研究, 筹建大口径射电望远镜以抢占制高点。
自1994年起通过持续不断地探索,中国天文学家提出在贵州喀斯特洼地中建造500m口径球面射电望远镜FAST的建议和工程方案,以期实现射电望远镜在中国的跨越式发展[1]。
1.2 FAST系统介绍FAST 为一架口径达500m的单口径射电望远镜,其利用贵州已有的喀斯特洼坑为台址,反射面能主动变形为。
射电望远镜相控阵馈源技术

射电望远镜相控阵馈源技术伍洋;杜彪;金乘进;朱凯;龚书喜【摘要】相位阵馈源是作为多波束馈源使用的小型二维相控阵天线,用以产生多个紧密交叠的波束,扩大射电望远镜的视场,提高巡天效率.文章分析了焦面场匹配与天线效率之间的联系,在单波束和多波束应用方面对相控阵馈源与传统的波导馈源进行了细致的比较,并介绍了相控阵馈源馈电的射电望远镜信噪比模型.作为一种新的馈源技术,相控阵馈源展现出更大的灵活性和更为优异的性能.【期刊名称】《电波科学学报》【年(卷),期】2013(028)002【总页数】6页(P348-353)【关键词】射电望远镜;馈源;焦面场;多波束【作者】伍洋;杜彪;金乘进;朱凯;龚书喜【作者单位】西安电子科技大学,陕西西安710071;射电天文技术联合实验室,河北石家庄050081;射电天文技术联合实验室,河北石家庄050081;射电天文技术联合实验室,河北石家庄050081;射电天文技术联合实验室,河北石家庄050081;西安电子科技大学,陕西西安710071【正文语种】中文【中图分类】TN823引言射电天文学是通过接收和处理来自天体的无线电辐射研究天文现象的一门学科.20世纪30年代,央斯基发现了来自银河的无线电波,标志着人类打开了在传统光学以外观测天体的第一个窗口,此后越来越多的学者进入这一研究领域,产生了一系列重大的发现.射电望远镜是射电天文学最主要的研究工具,尽管各个望远镜口径不同,形式各异,但喇叭天线以其良好的性能,在天线馈源中一直占据着主要地位[1-2].由于射电望远镜天线口径大,波束窄,完成一次巡天所需的时间极长,为提高巡天速度,常采用多个波束进行观测.近年来,许多国家开始在大中型射电望远镜天线上进行以小型相控阵天线作为多波束馈源的尝试,以形成数个相互交叠的瞬时波束,称为相控阵馈源(Phased Array Feed,PAF)技术.其中最具代表性的是荷兰ASTRON安装在韦斯特伯格综合孔径射电望远镜(WesterborkSynthesis Radio Telescope,WSRT)上的 Apertif[3],澳大利亚CSIRO为ASKAP研制的Checqureboad形式的PAF[4],加拿大DRAO 的PhAD[5],以及美国BYU/NRAO联合研制的 L-band PAF[6].我国在相关领域也开展过一些研究[7-8].图1以前馈抛物面天线为例,给出了相控阵馈电的天线系统模型:来自不同角度的入射波经天线面反射后,汇聚于焦点附近.位于焦平面的天线阵列接收到的入射信号,经低噪声放大器(Low Noise Amplifier,LNA)放大、接收机变频和采样后送入波束合成网络,赋权合成后输出.因此,相控阵馈源本质上是一种数字多波束技术.图1 相控阵馈源系统模型近些年,我国射电天文技术取得了长足的进步,相继建成密云50m、云南40m、上海65m射电望远镜,并在建设世界上最大的单口径射电望远镜(Five-hundred-meter Aperture Spherical radio Telescope,FAST).这些巨型望远镜为使用相控阵馈源实现数十乃至上百个波束的同时观测提供了可能,而相控阵馈源的应用也将大大提升望远镜的观测能力,推动我国射电天文事业的发展.同时,国际合作的平方公里阵(Square Kilometre Array,SKA)项目也在研究使用相控阵馈源技术扩大望远镜的视场.作为SKA的发起国和参与国,发展相控阵馈源技术也将为国际天文事业的进步做出贡献.本文研究了相控阵馈源在FAST上的应用.为了深刻理解相控阵馈源的特点,首先将其作为单波束馈源与波纹喇叭进行了分析和比较.研究了多波束相控阵馈源与馈源组的性能优劣.通过建立信噪比模型,给出了分别使用相控阵馈源和波纹喇叭馈电时FAST的灵敏度.上述研究可指导相控阵馈电反射面天线的设计.1 焦面场匹配与天线效率1.1 功率传输因子在各种馈源中,波纹喇叭以其优良的性能,常常用作反射面天线的馈源[2],故以下分析均以波纹喇叭为例.波纹喇叭一般从天线发射的角度(即照射天线的角度)进行设计,通过天线形式和焦径比等主要几何参数,求得馈源照射角,选定照射电平,再根据所需的方向图确定馈源的设计.焦面场分析则是从接收的角度进行馈源设计的一种方法,通过分析入射波在天线焦平面形成的场分布,确定馈源的尺寸和口面分布,由此确定馈源的各个参数.由于接收天线一般处于发射源的远场,可以将入射信号近似看作平面波.通过物理光学和绕射理论[9-10],得到相应的焦面场分布.设馈源口面场为,对应位置的焦面场分布为,功率传输系数可以表示为式中:S是馈源口面场与焦面场耦合的区域;*代表共轭.可以看出,当与相同时,η=1.1.2 焦面场匹配与天线效率天线的效率ηant可以表示为式中:Ae是天线的有效接收面积;Ap是天线在接收方向的投影面积.对于接收天线,有式中:Sin是入射波的功率密度;P是天线接收到的功率.由式(1)可知,当馈源的口面场分布与天线的焦面场匹配时,P最大,天线效率最高,因此可以根据焦面场的分布来进行馈源的设计.2 单波束照射FAST是一个口径为500m的球面射电望远镜,通过促动器的实时调整,可以将直径300m的反射面调整为焦径比f/D=0.461 1的抛物面[11],因此可将其按照前馈抛物面天线考虑.图2给出了轴向入射的平面波在焦平面激励起的归一化场分布,入射波频率1.25GHz.如图2所示,入射波汇聚在反射面焦点附近,焦面场的主要能量分布在第一零深以内.当馈源口面位于此处时,可实现对入射能量的良好接收.图3给出了1.25GHz时单元间距为0.5λ的3×3矩形各向同性天线阵列的方向图,按照共轭场匹配激励.作为比较,图中给出了直径1.25λ(按-10dB边缘电平估算的喇叭口径)圆形区域内焦面场的共轭积分,以及由高斯函数近似表示的波纹喇叭的方向图.图3中波纹喇叭与相同口径的焦面场积分的结果接近,说明其口面场与焦面场匹配良好,而尺寸相当的相控阵馈源通过适当激励也可实现类似的照射.图2 轴向入射平面波的焦面场分布图3 相控阵馈源与波纹喇叭方向图的比较对于前馈抛物面天线,类似高斯曲线的照射并不能实现最大的增益.考虑馈源到反射面的空间衰减,当馈源的方向图满足时,天线的口面场分布均匀,天线方向性最强.式中,θs是馈源的照射角.图4给出1.25GHz时按照共轭场匹配激励的9×9矩形各向同性天线阵列方向图,单元间距0.5 λ.作为比较,图中给出了sec2(θ)函数的曲线.由图4可知,通过采用更大的阵列,相控阵馈源可在更广的范围内还原焦面场分布,在反射面边缘附近以较高的照射电平补偿空间衰减,提高天线的方向性.图5给出了1.25GHz时分别使用图4中的波纹喇叭和相控阵馈源照射FAST反射面的方向图.由于相控阵馈源实现了更为均匀的照明,天线增益比波纹喇叭照射时高0.9dB,第一旁瓣上升至-18.5dB,接近均匀口面分布时天线的方向图.不同的天文观测对于天线方向图的要求不尽相同,因此,波纹喇叭在设计时不得不进行折衷.而相控阵馈源的方向图与加权相关,不仅能够实现更高的增益,还可以根据观测要求采用不同的波束合成因子,在高增益和低旁瓣之间进行切换.3 多波束应用传统的多波束技术(馈源组)主要以增加馈源数量的方式实现[12],天线的波束数量与馈源数量一致.通过使馈源横向偏离焦点,解决了各馈源空间上的相互干涉,也使得波束指向不同的天区.使用馈源组技术实现多波束的主要缺点在于:受物理尺寸的限制,各个馈源相位中心相距较远,而馈源的偏焦距离与波束的偏角密切相关,因此波束间隔很大,无法实现连续的天区覆盖.同时,偏离焦点的焦面场与馈源口面场失配,导致非轴向波束性能下降,限制了天线的波束数量.尽管馈源组有时也被称为‘焦平面阵’,但各馈源独立工作,并未体现出阵列天线的优点.相控阵馈源的波束数量主要取决于波束合成网络的处理能力.由于相控阵馈源的相位中心与激励有关,合成波束对应的馈源相位中心能够彼此靠近,使得波束相互交叠,实现连续的视场覆盖,简化巡天观测.此外,由于相控阵馈源接收面积较大,通过适当的加权能够较好地匹配焦面场,提高非轴向波束的性能,从而允许望远镜接收入射角更大的来波,扩大了望远镜的视场.图6给出了波纹喇叭和相控阵馈源在多波束应用时性能的比较.图中相控阵馈源采用11×11矩形各向同性天线阵列,单元间距0.5λ,按照共轭场匹配激励.其合成的各个波束3dB交叠,且一致性较好.后端处理能力允许时,相控阵馈源还可增加波束数量,进一步减小波束间隔.波纹喇叭的口径按-10 dB边缘电平估算为1.25λ,在考虑波纹槽深度的前提下,各馈源紧密排列.受馈源物理尺寸限制,各波束间隔较远,且随着偏离轴向角度的增加,波束变宽,旁瓣升高.与中心波束相比,第三个偏轴波束的增益下降了近3dB,旁瓣上升了18dB.为减小波束间隔,馈源组一般采用口径较小的多模喇叭作为馈源,但难以实现波束的连续覆盖.图6 波纹喇叭和相控阵馈源多波束的比较4 相控阵馈源天线的信噪比由于绝大多数射电源远离地球,到达地面的微弱信号往往湮没在噪声中[14],因此射电望远镜在关注天线方向图特性的同时,也在追求尽可能低的系统噪声.一般来说,天线的增益越高,旁瓣也越高,收到的噪声也越大,为实现最佳的观测效果,往往需要在增益和旁瓣间进行折衷.灵敏度是评价射电望远镜性能最主要的指标之一,是对其能探测到的最弱的射电源的度量[14].根据灵敏度的定义式中,Tsys是系统噪声温度.对于给定的入射波功率密度Sin,射电望远镜的灵敏度反映为天线系统的信噪比.对于一个N元阵列,其输出电压可以表示为式中:ω是发射时阵列的激励,其共轭ω*代表了接收时所对应的波束合成因子;H表示共轭转秩;v是接收机输出电压向量,由信号vsig、噪声vnoise和干扰vint三部分组成.式中,vnoise包含天空、地面噪声、单元的损耗噪声和接收链路(包括LNA和接收机)的噪声.由于LNA的增益很高,接收链路其余部分引起的噪声与LNA放大后的噪声相比很小,接收链路的噪声主要来自LNA.实际应用中的噪声、干扰,甚至承载信息的信号都可以看作随机过程,考虑到接收机输出电压的统计特性,其相关矩阵可以使用抽样估计描述为式中H表示共轭转秩.大多数情况下,信号、噪声和干扰三者互不相关,故可以假设式中,E[*]代表期望估计.输出电压的相关矩阵可以表示为[15]设接收机输出电压v与处于焦平面的对应单元的开路电压voc的关系为Q,即且假设各个放大器与接收机链路一致且独立,则式中:g是放大器的增益;ZA是阵列的互阻抗矩阵;ZL是单元端接负载的阻抗矩阵.则输出波束的天线信噪比对于给定的输出,RSN是ω*的函数.式(14)对ω*求偏导,得式中当RSN取极值时,式(15)等于零,则有式中,χ为括号内矩阵的本征值,其最大值χmax对应着RSN的最大值.由式中:χmax和VHsigω都是标量;而ω是一个相对值,故在求解ω时可以忽略,得到观测点源时最大信噪比所对应的波束合成因子图7给出了用式(14)估算的FAST在1.25 GHz时轴向波束的灵敏度.相控阵馈源采用11×11的矩形半波振子阵列,单元间距0.55λ,波纹喇叭边缘照射电平-12dB,二者的LNA均未制冷.如图7所示,采用最大信噪比加权的相控阵馈源灵敏度最高.而共轭场匹配加权对应的波束宽度最窄,但灵敏度低于波纹喇叭,说明该方式在实现最大增益的同时,引入了很高的系统噪声.图7 射电望远镜灵敏度的比较表1详细给出了图7中三种情况下FAST轴向波束灵敏度的比较.由表1可知,与波纹喇叭相比,相控阵馈源有效提高了天线的效率,同时引起了系统噪声温度的升高,其主要原因是由于阵列单元间存在互耦效应,导致单元的有源阻抗与LNA失配,引起LNA噪声升高.共轭场匹配加权在追求高增益时并未考虑噪声的影响,因此在三种情况中天线效率和系统噪声都是最高的.而最大信噪比加权则平衡了天线增益与系统噪声,使得其灵敏度最高.表1 波纹喇叭与相控阵馈源灵敏度的比较系统参数最大信噪比共轭场匹配波纹喇叭天线效率/% 86.1 91.9 61系统噪声/K 49.9 66.7 38.4灵敏度/(m2/K)2.1 7.1 0.8 LNA 43.8 55.6 33.6其他 4.0 4.0 4.0总计漏失1 220 974 1 123对于非轴向波束,相控阵馈源的性能优势更加明显,且波束的数量更多,因此能够大大提高射电望远镜的巡天效率.此外,互耦效应与单元和阵列的设计密切相关,通过精心设计,阵列单元与LNA可以实现良好的阻抗匹配,从而有效抑制LNA 乃至整个系统的噪声.5 结论相控阵馈源能够有效地补偿偏焦引起的相位误差,并且突破了馈源组各馈源物理尺寸的限制,天线各个波束的性能基本一致,实现了大视场连续覆盖,这是传统的馈源组技术无法比拟的.对于单个波束而言,相控阵馈源可以优化反射面照明,实现更高的天线效率,并根据不同的观测需求,在增益和旁瓣间进行优化处理.相控阵馈源单元间距小,互耦强,导致单元与LNA阻抗失配,噪声升高.此外,当前相控阵馈源系统大多工作于常温.这些因素使其系统温度高于制冷的波导馈源接收机,限制了射电望远镜的灵敏度.在后面的研究中,这些问题应予以重视和解决. 参考文献[1]CLARRICOATS P J B,OLIVER A D.Corrugated Horns For Microwave Antennas[M].UK:Peter Peregrinus Ltd,1984.[2]杨可忠.现代面天线新技术[M].北京:人民邮电出版社,1993:14-19. [3]VAN CAPPELLEN W A,BAKKER L,OOSTERLOO T A.APERTIF:Phased array feeds for the westerbork synthesis radio telescope[C]// IEEE International Symposium on Phased Array System and Technology (Array).Boston,2010:640-647.[4]CHIPPENDALE A,SCHINCKEL A.ASKAP:Progress towards36parabolic reflectors with phased array feeds[C]//General Assembly and Scientific Symposium.Istanbul,August 13-20,2011.[5]VEIDT B,HOVEY G J,BURGESS T,et al.Demonstration of a dual-polarized phased-array feed[J].IEEE Transactions on Antennas and Propagation,2011,59(6):2047-2057.[6]WARNICK K F,CARTER D,WEBB T,et al.Towards a high sensitivity cryogenic phased array feed antenna for the Green Bank Telescope[C]//General Assembly and Scientific Symposium.Istanbul,August 13-20,2011.[7]WANG Yan,ZHENG Yuliang,FENG Zhenghe,et al.Focal field analysis of very large approximated parabolic multibeam reflector[C]//4th International Conference on Microwave and Millimeter Wave Technology Proceedings,August 18-21,2004:211-214.[8]吕善伟,吴东梅,王伟,等.射电天文望远镜的焦面阵设计[J].北京航空航天大学学报,2007,33(3):341-344.LÜShanwei,WU Dongmei,WANG Wei,et al.Design of focal plane array of radio telescope[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(3):341-344.(in Chinese)[9]张浩斌,马凯学,郭陈江,等.任意多边形导体板的高频散射分析[J].电波科学学报,2003,18(1):53-56.ZHANG Haobin,MA Kaixue,GUO Chenjiang,et al.High-frequency scattering analysis of arbitrary shape conductor plate[J].Chinese Journal of Radio Science,2003,18(1):53-56.(in Chinese)[10]伍洋,杨可忠.偏轴卡塞格伦天线的二次赋形[J].电波科学学报,2010,25(5):899-904.WU Yang,YANG Kezhong.Design for re-shaped Cassegrain antenna with offset feeds[J].Chinese Journal of Radio Science,2010,25(5):899-904.(in Chinese)[11]NAN R D,LI D,JIN C J,et al.The five-hundred-meter aperture spherical radio telescope(FAST)project[J].International Journal of Modern Physics D,2011,20:989-1024.[12]KILDAL P S,JOHANSSON M,HAGFORS T,et al.Analysis of a cluster feed for the Arecibo trireflector system using forward ray tracing and aperture integration[J].IEEE Transactions on Antennas and Propagation,1993,41(8):1019-1025.[13]克里斯琴森.射电望远镜[M].陈建生,译.北京:科学出版社,1977:187-194.[14]李建斌,彭勃,孙建民,等.射电天文站电磁环境测量方法及分析[J].电波科学学报,2009,24(3):523-528.LI Jianbin,PENG Bo,SUN Jianmin,et al.Measurement method and analysis of electromagnetic environment in radio astronomic observatories[J].Chinese Journal of Radio Science,2009,24(3):523-528.(in Chinese)[15]JEFFS B D,WARNICK K F,LANDON J,et al.Signal processing for phased array feed in radio anstronmy[J].IEEE Journal of Selected Topicsin Signal Processing,2008,2(5):635-646.。