数字信号处理第二章2
数字信号处理第2章
Z变换与拉氏变换的关系:
这一关系实际上是通过 到了Z平面。
若将Z平面用极坐标表示
标表示
,代入
将S平面的函数映射
,S平面用直角坐 ,得:
上述关系表明: z 的模 r 仅与 s 的实部 相对应, z 的幅角 则仅与 s 的虚部 对应。
映射关系:
Z变换与拉氏变换的关系
0 0,2 (S平面实轴映射到Z平面的正实轴)
解:
,求它的傅立叶变换。
其幅度谱和相位谱分别为:
典型例题
❖ 例2 已知序列的傅立叶变换如下,求它的反变换。
解:
显然序列 h(n)不是绝对可和的,而是平方可和 的 ,但其依然存在傅立叶变换。 Parseval定理
典型例题
❖ 例3 证明复指数序列 x(n) e j0n 的傅立叶变换为:
证:根据序列的傅立叶反变换定义,利用冲击函 数 的性质,有:
即序列绝对可和
某的有 立些序些叶既列序变不,列换满若虽依足引然然绝入不存对频满在可 域足。和的以见的冲上后条击条例件函件。也数,不但满满,足足其平平傅方方立可可叶和和变条,换件其傅
也存在。如
、某些周期序列,见后例。
序列傅立叶变换的定义
5.常用序列的傅立叶变换
序列
(n)
傅立叶变换
1
1
典型例题
❖ 例1 已知
A形k(式k=求0,X取1(…:z),N)B,(此z) A( z )
时
为了方bi 便z i通常利用
i0
N
1 ai z i
X(z)/z的
i 1
若序列为因果序列,且N≥M,当X(z)的N个极点都是单
极点时,可以展开成以下的部分分式的形式:
则其逆Z变换为:
数字信号处理第二章

回到本节
返回
2.2.4 时域离散信号傅里叶变换的性质
时域离散信号傅里叶变换有很多重要的性质,其中一些 性质和模拟信号的傅里叶变换性质类似,参考教材中表 。 本小节重点介绍: 傅里叶变换的周期性 频域卷积定理 傅里叶变换的对称性
回到本节
返回
此定理亦称为调制定理
傅里叶变换的周期性:
1
频域卷积定理:
2
回到本节
返回
傅里叶变换的对称性: 一般不做特殊说明,序列x(n)就是复序列。用下标r表 示它的实部,用下标i表示它的虚部: 复序列中有共轭对称序列和反共轭对称序列,分别用下 标e和o表示 共轭对称序列满足 复反共轭对称序列满足
返回
回到本节
一般序列傅里叶变换的对称性质ຫໍສະໝຸດ 一般序列可以表示为返回
回到本节
左序列Z变换的收敛域
01
回到本节
返回
上式右边:
第一项的收敛域为0 ≤|z|<Rx+, 第二项的收敛域为0<|z|≤∞, 将两个收敛域相与,得到左序列的收敛域为0<|z|< Rx+ 。 如果n1<0,则收敛域为0 ≤|z|<Rx+。
回到本节
返回
双边序列Z变换的收敛域 双边序列就是在-∞~+∞之间均有非零值的序列。 双边序列的Z变换
回到本节
返回
例2.4: ,求Z反变换
回到本节
返回
Z变换和傅里叶变换之间的关系 Z变换 令上式中的 ,得到 式中,r是z的模,ω是它的相位,也就是数字频率。这 样, 就是序列x(n)乘以实指数序列r-n后的傅里叶 变换。
回到本节
返回
如果r= =1,Z变换就变成了傅里叶变换了,即 r=1指的是Z平面上的单位圆,因此傅里叶变换就 是Z平面单位圆上的Z变换。
数字信号处理第二章-2-2

10、帕斯维尔定理
x(n) X (e )
j
1 | x ( n ) | 2 n
2
X(e
-
j
) d
2
物理意义:时域的序列能量 = 频域的频谱能量
§2.5.5 利用Z变换解差分方程
N阶线性常系数差分方程
k 0
ak y(n k ) bk x(n k )
则:
x (n) X ( z )
ROC : R 。
*6、初值定理 如 果 x(n) 0 n0 ( 因 果 序 列 ) x(0) lim X ( z) z *7、终值定理
则:
如果 x(n)是因果序列,其Z变换的极点,除可以有一个一阶极点 在z=1上,其他极点均在单位圆内,则:
1
该方法的缺点是在复杂的情况下,很难得到x(n)的 封闭解形式。
*3.部分分式展开法
例2.5.10
该方法适合于大多数单阶极点的序列。
设x(n)的Z变换X(z)是有理函数,分母多项式是N阶的,分子多项 式是M阶,将 X(z)展成一些简单常用的部分分式之和,通过查表 求得各部分的逆变换,再相加即得原序列x(n)。 设X(z)只有N个一 阶极点,可展成:
k 0
ak y(n k ) bk x(n k )
k 0
N
M
设x(n)是因果序列,已知初始条件y(-1), y(-2), …y(-N) 求移位序列的单边Z变换: 设
考虑了初始状 态的Z变换
k 0
N
a k z k [Y ( z ) y (l ) z l ] bk X ( z ) z k
数字信号处理(方勇)第二章习题答案

2-1 试求如下序列的傅里叶变换: (1))()(01n n n x -=δ (2))1(21)()1(21)(2--++=n n n n x δδδ (3)),2()(3+=n u a n x n10<<a(4))4()3()(4--+=n u n u n x(5)∑∞=-⎪⎭⎫⎝⎛=05)3(41)(k nk n n x δ(6)()6cos ,14()0,n n x n π⎧-≤≤=⎨⎩其他解: (1) 010()()j n j j nn X e n n ee ωωωδ∞--=-∞=-=∑(2) 2211()()122j j nj j n X e x n e e e ωωωω∞--=-∞==+-∑ωsin 1j +=(3) 2232()(2)1j j nj nn j nj n n a e X e a u n ea eaeωωωωω-∞∞---=-∞=-=+==-∑∑, 10<<a(4) []4()(3)(4)j j nn X e u n u n eωω∞-=-∞=+--∑∑-=-=33n nj e ω∑∑==-+=313n n j n nj e eωωωωωωωj j j j j e e e e e --+--=--111134=⎪⎭⎫ ⎝⎛⎪⎭⎫⎝⎛=----ωωωω21sin 27sin 1137j j j e ee(5) 3350011()(3)44n kj jn j k n k k X e n k e e ωωωδ∞∞+∞--=-∞==⎛⎫⎛⎫=-= ⎪ ⎪⎝⎭⎝⎭∑∑∑∑∞+=--⎪⎭⎫⎝⎛-=⎪⎭⎫⎝⎛=033411141k j kj e e ωω(6) 44336441()cos 32j j j jn jn n n X e nee e e ππωωωπ---=-=-⎛⎫==+ ⎪⎝⎭∑∑994()()4()()3333001122j j n j j n n n e e e e ππππωωωω--++===+∑∑ ()9()9334()4()33()()3311112211j j j j j j e e e e e e ππωωππωωππωω-+-+-+⎡⎤⎡⎤--⎢⎥⎢⎥=+⎢⎥⎢⎥++⎢⎥⎢⎥⎣⎦⎣⎦2-2 设信号}1,2,3,2,1{)(---=n x ,它的傅里叶变换为)(ωj e X ,试计算(1)0()j X e (2)()j X ed πωπω-⎰(3)2()j X e d πωπω-⎰。
数字信号处理第三版第二章

(2.2.23) (2.2.24)
第1章 时域离散信号和时域离散系统
FT的对称性
(a) 将序列x(n)分成实结部论xr(:n)与虚部xi(n)
进行FT,得: x(nx) (=n)xr(=n)x+r(njx)i(+n)jxi(n)
X(e jω) X(e
j=ω)X=e(Xe ejω(e)
j+ω)X+o(Xe ojω(e)
第1章 时域离散信号和时域离散系统
[例2.3.1] 设x(n)=R4(n),将x(n)以N=8为周期进行
周期延拓,得到如图2.3.1(a)所示的周期序列
,
周期x(为n)8,求DFS[
]。 x(n)
解
jπ k4
7
j2π kn
3 jπ kn
X (k) x(n)e 8 e 4
n0
பைடு நூலகம்
n0
1
e
4 jπk
定义:设序列xe(n)满足 xe(n)=x*e(-n) 则称xe(n)为共轭 对称序列。
共轭对称序列的性质:
将xe(n)用其实部与虚部表示: xe(n) = xer(n)+jxei(n)
两边 n 用 –n 代替,并取共轭,得:
对比两式,
x*e(-n)=xer(-n)-jxei(-n)
得:
xer(n) = xer(-n)
jω)
式中
xr(n)和xi(n)都是实数序列。
Xe(ejω) 具有共轭对称性,其实部是偶函数,虚部是奇函数。 Xo(ejω) 具有共轭反对称性质,其实部是奇函数,虚部是偶函数。
第1章 时域离散信号和时域离散系统
(b) 将序列分成共轭对称部分xe(n)和共轭反对称部 分xo(n),即:
数字信号处理DSP第二章2z反变换

z1
4n
4
15 2021/4/21
j Im[z]
C
1/ 4 0
4 Re[z]
5
当n 1时 F (z)在围线c内有一阶极点z 1 和-(n 1)阶极点z 0
4 而围线c外只有一阶极点z=4,且F(z)的分母多项式 阶次高于分子多项式阶次两次以上
x(n) Re s[F (z)]z4
z
4
解:X
z
1
5 z 1 z1 6z2
z2
5z z 6
5z
z 2z 3
X
z
z
z
5
2z
3
A1 z2
A2 z3
3
j Im[z]
2
0
Re[z]
A1
Res
X
z
zБайду номын сангаас
z2
z
2
z
5
2
z
3
z2
1
A2 Res
2021/4/21
X
z
z
z3
z
3
z
5
2
z
3
z 3
1
16
X z
1
1
z z2 z3
bi zi
i0 N
1 ai zi
i 1
X (z)
M N n0
Bn zn
A M r k
k1 1 zk z1
r k 1
Ck [1 zi z1]k
用留数定理求系数:
Ak
Re
s
X (z) z zzk
k 1,2,
,M r
2021/4/21
15
例:X (z)
数字信号处理答案第二章

数字信号处理答案第⼆章第⼆章2.1 判断下列序列是否是周期序列。
若是,请确定它的最⼩周期。
(1)x(n)=Acos(685ππ+n ) (2)x(n)=)8(π-ne j(3)x(n)=Asin(343ππ+n )解 (1)对照正弦型序列的⼀般公式x(n)=Acos(?ω+n ),得出=ω85π。
因此5162=ωπ是有理数,所以是周期序列。
最⼩周期等于N=)5(16516取k k =。
(2)对照复指数序列的⼀般公式x(n)=exp[ωσj +]n,得出81=ω。
因此πωπ162=是⽆理数,所以不是周期序列。
(3)对照正弦型序列的⼀般公式x(n)=Acos(?ω+n ),⼜x(n)=Asin(343ππ+n )=Acos(-2π343ππ-n )=Acos(6143-n π),得出=ω43π。
因此382=ωπ是有理数,所以是周期序列。
最⼩周期等于N=)3(838取k k =2.2在图2.2中,x(n)和h(n)分别是线性⾮移变系统的输⼊和单位取样响应。
计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
(a)1111(b)-1-1-1-1-1-1222222 3333 3444………nnn nnnx(n)x(n)x(n)h(n)h(n)h(n)21u(n)u(n)u(n)a n ===2 2knhkx)()(按照折叠、移位、相乘、相加、的作图⽅法,计算y(n)的每⼀个取样值。
(a) y(0)=x(O)h(0)=1y(l)=x(O)h(1)+x(1)h(O)=3y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n≥2(b) x(n)=2δ(n)-δ(n-1)h(n)=-δ(n)+2δ(n-1)+ δ(n-2)y(n)=-2δ(n)+5δ(n-1)= δ(n-3)(c) y(n)= ∑∞-∞=--kkn knuku a)()(=∑∞-∞=-aa n--+111u(n)2.3 计算线性线性卷积(1) y(n)=u(n)*u(n)(2) y(n)=λn u(n)*u(n)解:(1) y(n)= ∑∞-∞=-kknuku)(-)()(kknuku=(n+1),n≥0 即y(n)=(n+1)u(n) (2) y(n)=∑∞-∞=-kk knuku)()(λ=∑∞=-0)()(k kk n u k u λ=λy(n)=λλ--+111n u(n)2.4 图P2.4所⽰的是单位取样响应分别为h 1(n)和h 2(n)的两个线性⾮移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a n u(n),|a|<1,求系统的输出y(n).解ω(n)=x(n)*h 1(n) =∑∞-∞=k k u )([δ(n-k)-δ(n-k-4)]=u(n)-u(n-4)y(n)=ω(n)*h 2(n) =∑∞-∞=k kk u a )([u(n-k)-u(n-k-4)]=∑∞-=3n k ka,n ≥32.5 已知⼀个线性⾮移变系统的单位取样响应为h(n)=an-u(-n),0系统的单位阶跃响应。
(完整word版)数字信号处理第二章习题解答
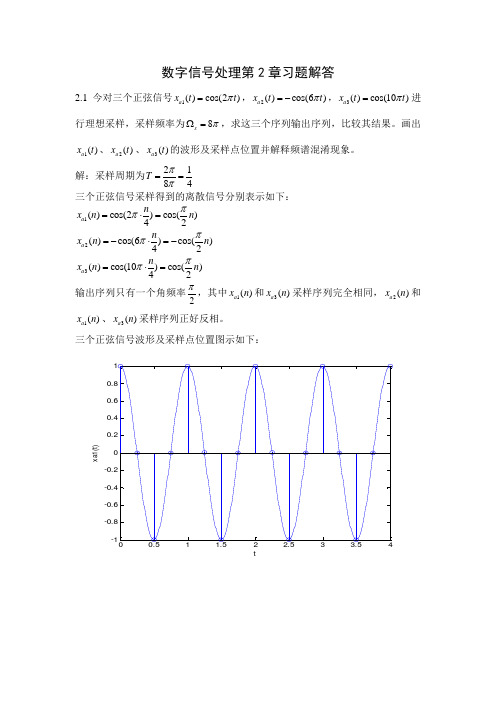
数字信号处理第2章习题解答2.1 今对三个正弦信号1()cos(2)a x t t π=,2()cos(6)a x t t π=-,3()cos(10)a x t t π=进行理想采样,采样频率为8s πΩ=,求这三个序列输出序列,比较其结果。
画出1()a x t 、2()a x t 、3()a x t 的波形及采样点位置并解释频谱混淆现象。
解:采样周期为2184T ππ== 三个正弦信号采样得到的离散信号分别表示如下:1()cos(2)cos()42a n x n n ππ=⋅=2()cos(6)cos()42a n x n n ππ=-⋅=-3()cos(10)cos()42a n x n n ππ=⋅=输出序列只有一个角频率2π,其中1()a x n 和3()a x n 采样序列完全相同,2()a x n 和1()a x n 、3()a x n 采样序列正好反相。
三个正弦信号波形及采样点位置图示如下:tx a 1(t )tx a 2(t )tx a 3(t )三个正弦信号的频率分别为1Hz 、3Hz 和5Hz ,而采样频率为4Hz ,采样频率大于第一个正弦信号频率的两倍,但是小于后两个正弦信号频率的两倍,因而由第一个信号的采样能够正确恢复模拟信号,而后两个信号的采样不能准确原始的模拟信号,产生频谱混叠现象。
2.3 给定一连续带限信号()a x t 其频谱当f B >时,()a X f 。
求以下信号的最低采样频率。
(1)2()a x t (2)(2)a x t (3)()cos(7)a x t Bt π解:设()a x t 的傅里叶变换为()a X j Ω(1)2()a x t 的傅里叶变换为22()[()]Ba a BX j X j d ππωωω-⋅Ω-⎰因为22,22B B B B πωππωπ-≤≤-≤Ω-≤ 所以44B B ππ-≤Ω≤即2()a x t 带限于2B ,最低采样频率为4B 。
数字信号处理-第2章-精品文档精选文档PPT课件

2.1、数字信号处理系统的基本组成
•大多数数字信号处理的应用中,信号为来自不同模拟信号源,这些模拟 信号(电压或电流)通常为连续时间信号。
•应用数字信号处理(DSP)主要有三个原因: 1)滤波:滤除信号中来自周围环境的干扰或噪声; 2)检测:检测淹没在噪声中的特定信号(如雷达或声纳系统中),当检测 到的信号超过给定的阈值则认为目标信号存在,反之认为不存在; 3)压缩:当信号转换到另外一个域后,在变换域上更容易分辨信息的重 要程度,对重要部分分配多的比特数,次要部分分配尽可能少的比特 数,达到压缩的目的(如DCT算法)。
的是离散时间信号。将连续时间信号转换成离散时间信号的过程叫抽样。
抽样可由称为A/D变换器的器件完成:
量化结果
声卡
5
模拟输入 xa (t)
Ts
抽样器
抽样输出
xˆa (t)
xˆa(t) xa(t)•P (t)
xa(t)(t nTs)
n
xˆa (t)
周期性抽样函数 P (t )
xˆa (t)
Ts
P(t) (tnTs)
是否可以根据抽样后的离散时间序列恢复原始信号? •奈奎斯特抽样频率:能够再恢复出原始信号的最低抽样频率(使 抽样后的信号频谱不发生混叠的最低抽样频率,即信号最高频率的 二倍)
0 s/2 s2 0
•满足奈奎斯特抽样频率的抽样信号可由理想低通滤波器恢复出原 始信号。此后将推导这个过程。
xˆa(t) G (j )/g (t( ) 低 通 y滤 (t) 波 xa) (t)
X a ( j)
xa
(t )e
jt dt
[xa
(t )
•
P
(t )]e
数字信号处理(第三版)第2章习题答案

第2章 时域离散信号和系统的频域分析
2.3
求信号与系统的频域特性要用傅里叶变换。 但分析频 率特性使用Z变换却更方便。 我们已经知道系统函数的极、 零点分布完全决定了系统的频率特性, 因此可以用分析极、 零点分布的方法分析系统的频率特性, 包括定性地画幅频 特性, 估计峰值频率或者谷值频率, 判定滤波器是高通、 低通等滤波特性, 以及设计简单的滤波器(内容在教材第5 章)等。
X e (e j ) FT[xr (n)]
Hale Waihona Puke 1 1 ej2 1 e j2 1 (1 cos 2)
24
4
2
因为 所以
Xe
(e j
)
1 2
[X
(e j
)
X
(e j
)]
X(ejω)=0π≤ω≤2π
X(e-jω)=X(ej(2π-ω))=0 0≤ω≤π
第2章 时域离散信号和系统的频域分析
当0≤ω≤π时,
用留数定理求其逆变换, 或者将z=ejω代入X(ejω)中, 得到X(z)函数, 再用求逆Z变换的方法求原序列。 注意收 敛域要取能包含单位圆的收敛域, 或者说封闭曲线c可取 单位圆。
第2章 时域离散信号和系统的频域分析
例如, 已知序列x(n)的傅里叶变换为
X
(e
j
)
1
1 ae
j
a 1
1 求其反变换x(n)。 将z=ejω代入X(ejω)中, 得到 X (z) 1 az 1
三种变换互有联系, 但又不同。 表征一个信号和系统 的频域特性是用傅里叶变换。 Z变换是傅里叶变换的一种推 广, 单位圆上的Z变换就是傅里叶变换。
第2章 时域离散信号和系统的频域分析
《数字信号处理》第二章 离散信号和抽样定理
信息。
重要结论
第三节 抽样定理
*带限信号抽样定理:
要想连续信号抽样后能够不失真的还原 出原信号,则抽样频率必须大于或等于两 倍原信号频谱的最高频率(2fm≤ fs),这就是 奈奎斯特抽样定理。
第三节 抽样定理
二、如何从抽样信号恢复出带限信号x(t)
n
其中
1 g (t)
0
t
2
t
2
Ts
第二节 连续信号的离散化
xa (t)
抽样器
(电子开关) P(t)
T
xa (t)
xˆs (t)
fs
1 T
xˆs (t)
第二节 连续信号的离散化
理想抽样:当τ 趋于零的极限情况时,抽样脉冲
方波p(t)变成了冲激函数序列δT(t),这些冲击函数 的强度准确地为采样瞬间的xa(t)幅值,这样的抽 样称为理想抽样。
余弦与正弦序列示意图如下:
第一节 离散时间信号
5、 用单位脉冲序列表示任意序列
任意序列x(n)都可用单位脉冲序列δ(n)表示成 加权和的形式,即
x(n) x(m) (n m) m
如:
a n x(n)
可表示为 0
10 n 10 其他
10
x(n) am (n m)
样品集合可以是本来就存在的,也可以是由模拟 信号通过采样得来的或者是用计算机产生的。
第一节 离散时间信号
离散时间信号的时域表示 1) 表示离散时间信号可采用枚举的方式。例如
{x(n)}={…,-1.5,-8.7,2.53,0.0,6,7.2, …}
数字信号处理-时域离散随机信号处理(丁玉美)第2章
rxx (0) rxx (0) Rxx r ( M 1) xx
第二章 维纳滤波和卡尔曼滤波 (2.2.22)式可以写成矩阵的形式, 即
Rxd Rxxh
对上式求逆,得到
h Rxx1Rxd
(2.2.23)
(2.2.24)
第二章 维纳滤波和卡尔曼滤波 上式表明已知期望信号与观测数据的互相关函数及观测 数据的自相关函数时,可以通过矩阵求逆运算, 得到维纳滤
E[| e(n) |2 ] E[| e(n) |2 ] j 0 a j b j
记
j=0, 1, 2, … (2.2.6)
j j a j b j
j=0, 1, 2, …
(2.2.7)
第二章 维纳滤波和卡尔曼滤波 则(2.2.6)式可以写为
j E[| e(n) |2 ] 0
j 0
(2.2.16)
假定滤波器工作于最佳状态,滤波器的输出yopt(n)与期望信号d(n) 的误差为eopt(n),把(2.2.15)式代入上式,得到
* E[ yopt (n)eopt (n)] 0
(2.2.17)
第二章 维纳滤波和卡尔曼滤波
d(n) eo pt(n)
yo pt(n)
图 2.2.1 期望信号、 估计值与误差信号的几何关系
方法求解,简单易行,具有一定的工程实用价值,并且物理概
念清楚,但不能实时处理;维纳滤波的最大缺点是仅适用于一 维平稳随机信号。这是由于采用频域设计法所造成的, 因此人 们逐渐转向在时域内直接设计最佳滤波器的方法。
第二章 维纳滤波和卡尔曼滤波
2.2 维纳滤波器的离散形式——时域解
2.2.1 维纳滤波器时域求解的方法 根据线性系统的基本理论,并考虑到系统的因果性,可以 得到滤波器的输出y(n),
《信号、系统与数字信号处理》第二章 连续时间信号与系统的频域分析

0 21
/4
/2
(b)相位图
图2.1-2例2.1-2的频谱图
二、指数形式的傅里叶级数
利用欧拉公式将三角形式的傅里叶级数,表示为 复指数形式的傅氏级数
其中
f t F n1 e jn1t
n
F n1
1 T
t0 T t0
f t e jn1tdt
F n1 是复常数,通常简写为 Fn 。
21t
5
4
2
sin
1t
1 2
sin
31t
解:将 f t 整理为标准形式
f
(t)
1
2cos 1t来自4cos 21t
5
4
1 2
cos
31t
2
1
2
cos
1t
4
cos
21t
4
1 2
cos
31t
2
振幅谱与相位谱如图2-1所示。
cn
2
1
1
1/2
0 1 21 31
(a) 振幅图
n
/4
31
第二章 连续时间信号与系统的频域分析 ——Fourier变换
2. 1 周期信号的傅里叶级数分析 2. 2 非周期信号的频谱--傅里叶变换 2. 3 傅里叶变换的性质及定理 2. 4 系统的频域分析方法 2. 5 无失真传输系统与滤波
LTI系统分析的一个基本任务,是求解系统对任意 激励信号的响应,基本方法是将信号分解为多个基本信 号元。
一、三角形式傅里叶级数
周期信号: f t f t nT
其中
T
是信号的最小重复时间间隔,f1
1 是信号的基波频率。 T
若 f t 满足狄里赫利条件,则 f t 可以展开为三角形
数字信号处理——第2章 离散时间傅里叶变换与Z变换

• 总结:
①序列ZT的收敛域以极点为边界(包含0 和 ②收敛域内不含任何极点,可以包含0 ③相同的零极点可能对应不同的收敛域,即: 不同的序列可能有相同的ZT ④收敛域汇总:右外、左内、双环、有限长z平面
)
常见典型序列z变换
序列 Z变换 收敛域
z a
z b
注意:只有z变换和它的收敛域两者在一起才和序列相对应。 其它序列见P54: 表2-1 几种序列的z变换
2.3
z反变换
Z反变换: 从X(z)中还原出原序列x(n)
X ( z ) ZT [ x ( n)]
n
x (n) z n
实质:求X(z)幂级数展开式
Z反变换的求解方法: 留数定理法
部分分式法
长除法
1. 留数定理法
根据复变函数理论,可以推导出
x ( n)
1 2 j
X ( z ) z n 1dz
1 1 3z 1
n
z 2
2 n u ( n)
z 3
3
n
n
u (n 1)
x n 2 u n 3 u n 1
3. 幂级数法(长除法)
如果序列的ZT能表示成幂级数的形式,则序列x(n) 是幂 级数 说明: ①这种方法只对某些特殊的ZT有效。 ②如果ZT为有理函数,可用长除法将X(z)展开成幂级 数。 若为右边序列(特例:因果序列),将X(z)展开成负幂 级数; 若为左边序列(特例:反因果序列),将X(z)展开成正 幂级数; 中
z z 1 1 X z 1 z 2 z 3 1 2z 1 3 z 1
1 ZT [a u (n)] z a 1 1 az 1 n ZT [a u (n 1)] z a 1 1 az
数字信号处理 第2章
x(n)21
π
2
x(ej) d
n
2ππ
(2.2.35)
第2章 时域离散信号和系统的频域分析
证明
n x ( n )2 n x ( n ) x * ( n ) n x * ( n ) 2 1 π π π X ( e j ) e j n d
第2章 时域离散信号和系统的频域分析
交换积分与求和的次序,得到:
Y(ej)2 1 π π πH (ej) n x(n)ej( )n d
1 π H(ej)X(ej())d
2π
1 X(ej)H(ej) 2π
(2.2.34)
该定理表明,在时域两序列相乘,转移到频域时
服从卷积关系。
第2章 时域离散信号和系统的频域分析
h(0) n 0
he (n )
1 2
h(n)
n0
1 2
h
(
n
)
n0
(2.2.26)
0
n0
ho (n)
1 2
h(n)
n0
1 2
h ( n )
n0
(2.2.27)
第2章 时域离散信号和系统的频域分析
按照上面两式,实因果序列h(n)可以分别用he(n)和 ho(n)表示为
h(n)he(n)u(n)
(2.2.1)
第2章 时域离散信号和系统的频域分析
FT为Fourier Transform的缩写。FT[x(n)]存在的充 分必要条件是序列x(n)满足绝对可和的条件,即满足下式:
| x(n) |
n
(2.2.2)
X(ejω)的傅里叶反变换为
x(n)IF [X T (ej) ]1πX (ej)d(2.2.3) 2π π
数字信号处理第二章2
可加性:
2 T [ x1 n x2 n ] [ x1 (n) x2 (n)] sin( n ) 9 7 2 2 x1 (n) sin( n ) x2 (n) sin( n ) 9 7 9 7 y1 (n) y2 (n) 2 T [ax1 n ] ax1 (n) sin( n ) ay1 n 9 7
已知某线性移不变系统,其单位抽样响应h(n)为
h(n) a u (n)
n
讨论其因果性和稳定性
2.3常系数线性差分方程
一、差分方程的表示
二、差分方程的求解
三、系统结构
一.表示法
一个N阶常系数线性差分方程表示为
a
k 0
N
k
y (n k ) m 0b NhomakorabeaM
m
x ( n m)
三.系统结构
1.系统的输入与输出的运算关系的表述,非 实际结构。 2.差分方程可直接得到系统结构。 例:y(n)=b x(n)-a y(n-1)
0 1
用⊕表示相加器; 用 表示乘法器; 用 Z 1 表示一位延时单元。
例:差分方程y(n)= b0 x(n)-a1y(n-1)表示的系统结构为 : x(n)
线性移不变因果系统的充要条件为
h(n)=0,n< 0。或h(n)=h(n)u(n)
六、稳定系统
有界的输入产生有界的输出系统。(BIBO) 线性移不变稳定系统的充要条件是
n
h( n)
p
已知某线性移不变系统,其单位抽样响应h(n)为
h( n) a u ( n)
n
《数字信号处理》课件第2章 (2)

|z|>a的整个区域。
序列的性质决定了Z变换的收敛域。为了进一步搞清这种
关系,我们专门讨论几种特殊序列的情景。
第二章 Z 变 换
Z平面 Im
收敛 域
a
Re
图2.1 序列anu(n)的Z平面上的零、极点与收敛域
第二章 Z 变 换
1 假设该序列只有有限多个序列值不为零, 因而
n2
X (z) x(n)zn
n
n0
等式右边第一项的收敛域为0≤|z|<Rx+,第二项的收敛域为0<|z|≤∞, 所以X(z)的收敛域为0<|z|<Rx+,同样处于以Rx+为半径的一个圆的 里边, 但Z平面的原点已不包括在收敛域之内。
第二章 Z 变 换 4. 双边序列 双边序列是从n=-∞ 延伸到n=∞的序列, 通常可写成
1
X (z) x(n)zn x(n)zn x(n)zn (2-10)
(2-5)
nn1
对这个Z变换而言,z=0及z=∞有可能是它的极点, 这要视n的具
体取值而定。首先,如果n1≥0,x(n)为因果序列, 此时z=∞将不再 是极点,因而其收敛域应该是0<|z|≤∞,即z=∞ 也在其收敛域内。
其次,如果n2<0(即n<0),这时z=0已不是极点,收敛域将是 0≤|z|<∞,Z平面的原点也处于其收敛域内。最一般的情况可能是
x(n) 1 2πj
C'
X
1 p
pn1
p2dp
(2-22)
第二章 Z 变 换
第二章 Z 变 换
对于有理Z变换而言,围线积分用留数定理求值较方便。此时
x(n) 1 X (z)zk1dz [ X (z)zn1在C之内的极点上的留数 ]