人类负重外骨骼论文
外骨骼减重原理

外骨骼减重原理宝子们!今天咱们来唠唠外骨骼减重这个超有趣的事儿。
你有没有想过,就像超级英雄有超酷的装备一样,外骨骼也能帮我们轻松减重呢?咱先来说说啥是外骨骼。
外骨骼呀,就像是给人穿上了一层机械的“外壳”。
这层外壳可不得了,它可不是简单的装饰品。
想象一下,你背着一个超级重的包,感觉自己都要被压垮了,这时候外骨骼就像一个贴心的小助手蹦出来啦。
外骨骼减重的原理呢,有一个很关键的点就是力量的传递和分担。
你看啊,我们人体在承受重量的时候,主要是靠肌肉、骨骼这些来支撑。
可是我们的肌肉力量是有限的呀。
外骨骼呢,它就像是一个力量的传递大师。
当你穿上外骨骼后,它会把你身上的重量,比如说你背着的重物或者是自身的体重,巧妙地分散开来。
就好像你有一群小帮手,原本都压在你身上的重量,现在被这些小帮手们分别承担了一部分。
比如说,外骨骼在腿部这个部分,它可以分担你腿部承受的压力。
当你走路或者抬腿的时候,外骨骼会根据你的动作,恰到好处地给你的腿部提供一个向上的助力,就好像有一双无形的大手在轻轻托着你,让你的腿不会那么累。
再说说外骨骼的结构设计。
它的结构就像是精心打造的一个机械骨架。
这个骨架的关节部分可都是有大学问的。
就像我们人的关节一样,外骨骼的关节也能够灵活地转动。
但是呢,它在转动的同时,还能够储存和释放能量。
这怎么理解呢?就好比是一个小小的能量仓库。
当你下蹲的时候,外骨骼的关节会把这个过程中的能量储存起来,就像把小水滴收集到一个小瓶子里一样。
然后当你起身的时候呢,它又把储存的能量释放出来,帮助你更轻松地站起来。
这就好像是有人在你背后轻轻推了你一把,是不是很神奇呢?还有哦,外骨骼的传感器也是减重的大功臣。
这些传感器就像是外骨骼的小眼睛和小耳朵。
它们能够敏锐地感知到你的动作意图。
比如说,你想要向前迈一步,传感器就会迅速捕捉到这个信息,然后告诉外骨骼的其他部分:“主人要迈步啦,我们得赶紧帮忙。
”于是,外骨骼就会根据这个信息,调整它的助力大小和方向。
含储能元件辅助负重人体下肢外骨骼的机构设计及力学性能研究

含储能元件辅助负重人体下肢外骨骼的机构设计及力学性能研
究
辅助人体承重的下肢外骨骼是指可穿戴于人体之上并扩展其下部肢位运动能力,减少人体骨骼负载及关节转矩的外骨骼,但传统下肢外骨骼存在质量大、续航时间短、适应性差的问题,无法在山地、丘陵等复杂地形下使用。
本文提出了一种含储能元件辅助负重的闭链人体下肢外骨骼,该外骨骼通过借鉴人体蓄能策略,增设仿生储能元件以提高人体能耗比,并以人体关节为驱动源,实现辅助人体长时间远距离负重行走。
首先,根据人体特性提出了三种下肢外骨骼的初选方案,通过ADAMS对各方案的仿真分析确定了最终的运动方案。
该方案确定了由主体框架及储能元件组成的机械结构,并对下肢外骨骼的运动方案进行了结构设计。
其次,用封闭矢量法建立该下肢外骨骼的运动学模型,对人体和下肢外骨骼进行静力学分析,并用MATLAB软件对下肢外骨骼静力学求解。
进而结合人体行走特性,设计带有预紧力的变刚度弹簧为仿生储能元件,同时以一个步态周期内,人体腿部各关节总有效转矩最小为目标,采用逐步搜索法确定最优弹簧刚度。
最后,通过ADAMS软件动力学仿真验证下肢外骨骼数学模型的正确性,并根据下肢外骨骼总体设计加工制造第一代原理样机,达到20kg负载减重95%、减少人体关节总有效转矩13.4%;40kg负载减重80%,减少人体关节总有效转矩11.9%的效果。
通过人体穿戴实验得出该外骨骼可大幅提升人体能源利用率,改善了传统下肢外骨骼续航时间短、环境适应性差、承载能力小、动态性能差、笨重、能耗大的问题。
外骨骼的作文

外骨骼的作文
《外骨骼的奇妙世界》
嘿,朋友们!你们知道外骨骼吗?这玩意儿可太神奇啦!
记得有一次,我在电视上看到一个关于外骨骼的纪录片。
哇塞,那里面的外骨骼就像是超级英雄的装备一样!我看到那些原本行动不太方便的人,穿上外骨骼后,竟然能灵活自如地行走、甚至跑起来了呢!那感觉就像他们突然获得了一种超能力。
镜头里,有个大叔坐在轮椅上很多年了,生活中有很多不便。
但当他穿上外骨骼的那一刻,我看到他脸上露出了惊喜的表情。
接着,他试着慢慢站起来,一开始还有点摇晃,就像小孩子刚学走路似的,让人忍不住为他捏一把汗。
但慢慢地,他走得越来越稳,还能迈开大步往前走了呢。
他开心得像个孩子得到了最心爱的玩具,那笑容别提多灿烂了,就好像阳光一下子洒满了他的世界。
而周围的人也都为他欢呼鼓掌,那场面真是温馨又感人。
外骨骼啊,它可真是科技的奇迹。
它就像是给人们加上了一层神奇的保护衣,让那些可能被身体限制住的梦想又有了飞翔的可能。
我真希望以后外骨骼能够越来越普及,帮助更多的人重新找回自信和快乐,去体验生活中更
多的精彩呀!这就是我对外骨骼的感受,真的觉得它超级神奇,也超级有意义呢。
这就是外骨骼的奇妙之处啊,让人忍不住感叹科技的力量真是强大!。
外骨骼机器人负重机理研究及动力学分析
本章小结 ...................................................... 36
III
北京理工大学工程硕士学位论文
第 4 章 外骨骼机器人动力学分析 .............................. 37
4.1 外骨骼机器人数学模型的建立 .................................... 38 4.1.1 4.1.2 4.2 D-H 坐标系建立方法 ..................................... 38 外骨骼坐标系建立 ....................................... 40
adamssimulationanalysis北京理工大学工程硕士学位论文iii目录11本文研究背景目的及意义111背景介绍112本文的研究目的及意义12国内外研究现状及发展趋势121国外研究现状122国内研究现状1113本文研究内容1421人体下肢解剖学概述1422下肢关节运动机理研究1523人体步态分析1824外骨骼机器人设计22241外骨骼机器人结构设计23242外骨骼驱动方式及驱动关节确定24243外骨骼总体建模2525本章小结2731步态周期中外骨骼机器人负重状态分析2732外骨骼机器人负重机理分析29321外骨骼机器人负重行走时能量分析29322外骨骼机器人动力学方程31323外骨骼机器人负重助力机理分析3433本章小结36北京理工大学工程硕士学位论文iv3741外骨骼机器人数学模型的建立38411dh坐标系建立方法38412外骨骼坐标系建立4042外骨骼机器人动力学方程建立43421单脚支撑态动力学方程45422双脚支撑态动力学方程4843外骨骼机器人动力学分析52431外骨骼机器人机构与人体相似性分析52432拉格朗日方程求解52433结果分析5544本章小结外骨骼机器人adams仿真分析5951仿真方法概述5952人机协同情况仿真分析60521仿真模型建立60522驱动函数设计62523模型运动仿真62524仿真结果分析6353外骨骼机器人动力学及助力效果仿真分析66531adams动力学仿真分析66532动力学方程计算力矩与adams仿真力矩对比分析68533外骨骼助力效果分析7054本章小结71结论72北京理工大学工程硕士学位论文74致谢77北京理工大学工程硕士学位论文绪论11本文研究背景目的及意义111背景介绍外骨骼技术来源于生物学中外骨骼
人体负重外骨骼装置研究进展及发展趋势
既拥有人的智慧又能承受重载的机器 ,可 以很 大程度地提高部队的作战能 力 在民用方而 ,
用途 更广 2 0 0 8年 的 汶川 地震 救 援 中 ,由于 车 辆 难 以进 入 , 大 量 人 员滞 留震 区 无法 得 到救 援 ,
其 研 制 特 点 , 简述 了人 体 负 重 外 骨骼 装 置 的 研 究 方 向 和 相 关 主要 内容 , 并对 人 体 负重 外 骨 骼 装 置 的发 展
方向进行 了展 望,为人体 外骨骼 装置的研 究提供 了参 考. =
关键词:人体 负重外骨骼 装置;运动 学;机器人 ;能 和耐 力有 限 ,大 量 的 军 事物 资 无
器替代人工 ,其中似人类的装置称为仿 人型机 器人 。 但机器人缺乏人类特有的灵活性和智慧 ,
一
法在复杂的地形环境 中快速移动 ,一旦战争爆
发 ,对作 战 能 力影 响 甚 大 。而 人 体 外 骨骼 这 种
段 时间内机器人不可能完全代替人类进行工
一
活动 、 旅行等方面得到广泛应用 。 在军事方面 , 由于地形的复杂性 ,大规模机械化车辆难以深
入到深林 、山路 、阶梯路面等地进行作战 ,以
人员为主的兵 力部署仍然发挥 主要作用 ,但是
方面可 以不费太多力气地将受灾物资和人员
转移到安全地点 。此外 ,人体 外骨骼装置还能
收 稿 日期 :2 0 1 6 —0 8 —3 0
( 1 . Ch e n g d u No . 7 Hi g h S c h o o l , Ch e n g d u 6 1 0 0 4 1 , Ch i n a ; 2 . S c h o o l o f Me c h a t r o n i c s En g i n e e r i n g , Un i v e r s i t y o f El e c t r o n i c S c i e n c e a n d Te c h n o l o g y o f Ch i n a , C h e n g d u 6 1 1 7 3 1 , Ch i n a) Ab s t r a c t : L o t s o f r e s e a r c h p r o g r e s s i n Hu ma n Un i v e r s a l L o a d Ca r r i e r ( HUL C ) a r e s u mma r i z e d a n d t h e p r o p e r t y
《可穿戴式膝关节力反馈外骨骼助力系统研究》范文

《可穿戴式膝关节力反馈外骨骼助力系统研究》篇一一、引言随着人口老龄化的加剧和人们对于健康生活需求的提高,可穿戴式膝关节力反馈外骨骼助力系统逐渐成为研究的热点。
该系统通过对外骨骼的机械设计与控制算法的优化,为人类提供辅助支撑与力反馈,以增强膝关节的稳定性和减轻人体在行走、运动过程中的负担。
本文旨在研究可穿戴式膝关节力反馈外骨骼助力系统的设计原理、实现方法及其应用前景。
二、研究背景及意义可穿戴式外骨骼系统作为一项前沿技术,近年来在康复医学、体育训练和辅助设备等领域取得了显著的成果。
尤其在助力系统中,其通过模拟人体肌肉运动原理,为人体提供辅助支撑,有效减轻了人体在运动过程中的负担。
而膝关节作为人体运动的重要关节,其稳定性和灵活性对于人体行走、跑步等运动至关重要。
因此,研究可穿戴式膝关节力反馈外骨骼助力系统具有重要意义。
三、系统设计原理1. 机械结构设计可穿戴式膝关节力反馈外骨骼助力系统的机械结构设计主要包括外骨骼框架、驱动装置、传感器等部分。
其中,外骨骼框架需根据人体工学原理进行设计,确保与人体膝关节的贴合度;驱动装置则负责提供动力,驱动外骨骼进行运动;传感器则用于实时监测人体的运动状态,为控制算法提供数据支持。
2. 控制算法设计控制算法是可穿戴式膝关节力反馈外骨骼助力系统的核心部分,其通过对外骨骼的运动状态进行实时控制,实现力反馈和辅助支撑。
常用的控制算法包括基于模型的控制算法、基于学习的控制算法等。
这些算法需根据具体应用场景进行优化,以实现最佳的控制效果。
四、实现方法1. 材料选择可穿戴式膝关节力反馈外骨骼助力系统的实现需要选用轻质、高强度的材料,如碳纤维复合材料、轻质合金等,以确保系统的轻量化和耐久性。
2. 制造工艺制造工艺方面,需采用先进的加工技术和装配工艺,确保外骨骼框架的精度和稳定性。
同时,还需对驱动装置、传感器等部件进行精密的调试和校准,以确保整个系统的性能稳定可靠。
五、应用场景及效果可穿戴式膝关节力反馈外骨骼助力系统在康复医学、体育训练和辅助设备等领域具有广泛的应用前景。
高级外骨骼超人力量

高级外骨骼超人力量高级外骨骼:超越人类力量的未来近年来,随着科技的不断进步,人类对于外骨骼技术的研发取得了令人惊叹的成就。
高级外骨骼的出现,给人类带来了超乎想象的力量和力量,为生产力的提升和人类生活的改善开辟了新的道路。
本文将探讨高级外骨骼技术的应用领域、优势和未来前景,展望这一引人瞩目的科技创新将如何改变我们的世界。
第一部分:高级外骨骼技术的应用领域高级外骨骼技术作为一项颠覆性的科技创新,其应用领域广泛而深远。
以下是几个典型的应用领域示例:1. 医疗保健: 高级外骨骼在医疗保健领域具有重要意义。
它可以帮助行动不便或残疾人士恢复步态和日常生活能力。
通过提供额外的支持和稳定性,高级外骨骼可以减轻步行负担,促进康复过程。
2. 工业生产: 在工业领域,高级外骨骼技术能够减轻工人长时间劳动引起的疲劳和损伤。
穿戴者可以承受更大的负荷并延长工作时间,从而提高生产效率和工作安全性。
3. 军事应用: 高级外骨骼在军事领域具备巨大潜力。
它可以增强士兵的力量和耐力,提高作战能力。
高级外骨骼还可以为军事设施和装备提供动力支持,增加机动性和生存能力。
第二部分:高级外骨骼技术的优势高级外骨骼技术相比传统的机器人技术具有显著优势。
以下是几个主要的优势点:1. 增强人体能力: 高级外骨骼通过机械结构和智能算法,为人体提供额外的力量和支持。
它能够扩展人类的生理能力,帮助人们完成更加庞大和复杂的任务。
2. 灵活适配性: 高级外骨骼可以根据个体需求进行定制化设计,适应不同人体形态和行动方式。
它的机械结构可以灵活调整,以获得最佳的运动性能和舒适性。
3. 智能化控制: 高级外骨骼技术集成了先进的传感器和控制系统,能够实时监测穿戴者的动作和环境变化,并做出相应的反馈和调整。
这使得外骨骼与人体协同工作,带来更加自然和流畅的动作表现。
第三部分:高级外骨骼技术的未来前景高级外骨骼技术在未来具有广阔的应用前景,并且将不断取得突破性进展。
以下是几个值得关注的未来发展方向:1. 精确控制技术: 未来的高级外骨骼将进一步改进控制系统,实现更加精确和自然的运动控制。
奇思妙想外骨骼机甲作文

奇思妙想外骨骼机甲作文英文回答:In a world on the cusp of extraordinary scientific advancements, the advent of exoskeleton suits ignites the imagination and sparks the promise of boundless possibilities. These wearable marvels, with their unparalleled strength and agility, pave the way for afuture where human capabilities are amplified to unprecedented heights.Imagine an injured construction worker, once relegatedto a sedentary existence, now donning an exoskeleton suit that grants him superhuman strength to deftly maneuverheavy machinery. Or envision a soldier equipped with a combat-ready exoskeleton, its lightning-fast reflexes and enhanced perception ensuring survival in the face of danger.But the transformative potential of exoskeleton suits extends far beyond the realm of physical prowess. For thephysically disabled, they represent a lifeline, a means to restore mobility and regain a sense of independence. Individuals confined to wheelchairs can experience the exhilaration of standing tall and walking with newfound freedom.Moreover, the applications of exoskeleton technology extend to the realms of industry, healthcare, and even disaster relief. In hazardous environments, such as construction sites or chemical plants, exoskeletons provide workers with unparalleled protection, reducing the risk of injury and enhancing productivity.In healthcare, exoskeletons revolutionizerehabilitation by enabling patients to regain motor skills more effectively and efficiently. Physical therapists can harness the power of exoskeletons to provide targeted assistance, facilitating faster recovery and improved functionality.In the aftermath of natural disasters, exoskeletonsuits empower rescue personnel with superhuman strength,enabling them to lift heavy debris, access remote areas, and save lives. Their increased mobility and endurance make them invaluable assets in disaster zones, where time is of the essence.As the technology behind exoskeleton suits continues to advance, we can anticipate even more extraordinary applications. The integration of artificial intelligence, for instance, promises to augment the user's cognitive abilities, creating a symbiotic relationship between human and machine.The future of exoskeleton technology holds boundless promise. From empowering individuals with disabilities to revolutionizing industries and safeguarding lives, these incredible devices are poised to transform the very fabric of human existence.中文回答:在即将迎来非凡科学进步的世界中,外骨骼机甲的问世点燃了想象力,并带来了无限可能的希望。
外骨骼机甲作文400字

外骨骼机甲作文400字英文回答:Exoskeletons are a type of wearable technology that can enhance a person's physical abilities. These mechanical suits, often referred to as exosuits or exoskeletons, are designed to provide support, strength, and protection to the wearer. They can be used in a variety of fields, including military, healthcare, and industry.One of the main advantages of exoskeletons is their ability to increase strength and endurance. By providing additional support to the wearer's muscles and joints, exoskeletons can allow individuals to carry heavier loads or perform tasks that would otherwise be physically demanding. For example, in the military, soldiers wearing exoskeletons can carry heavy equipment over long distances without becoming fatigued.Exoskeletons also have the potential to improvemobility for individuals with disabilities. By assisting with movement and providing stability, exoskeletons can help people with spinal cord injuries or mobility impairments to walk again. This can greatly enhance their quality of life and independence.Furthermore, exoskeletons can also be used for rehabilitation purposes. They can assist patients recovering from injuries or surgeries by providing support and guidance during physical therapy sessions. This can help patients regain strength and mobility more quickly, improving their overall recovery process.In addition to their practical uses, exoskeletons also have a cool factor. Who wouldn't want to feel like a superhero, wearing a powerful suit that enhances their abilities? It's like having a personal Iron Man suit or a real-life version of the Power Rangers. The idea of strapping on a mechanical suit and feeling invincible is definitely appealing.中文回答:外骨骼机甲是一种可穿戴技术,可以增强人体的物理能力。
提高10倍负重能力的外骨骼系统

J I = t U池 仓 的 没 汁 ,负 币 较 轻 ,最 怏 行 动述 度 甚
至 达 钏 2 . 6 k m/ h
的 曩物 就 如 同 举 l k g一 般 .也 就 是 说 , 人 的 力 气 会 变 成 原 来 的 l 0倍 。 R r ・ I ) o — Ma l r外 骨 骼 系 统 的 手 臂 模 组 设 计 非 常 复 杂 精 细 , 可 完 全 模 拟 穿 戴 者 手 臂 动 作 , 强 令 C t - 举 起 重物 I I I f 避 免手 儿 伤 脊椎 或椎 『 日 】 盘。 这 项 肝 创 性 的 外 骨 骼 系统 造 价 约 3 0万 欧 元 , 『 } 1 德l 斯 图 加 特 r程 研 究 机 构 F r a i l n h o f e r I A 0 历 时 2年
刮f f 【 1 J 安个f r , J 题
一
般 术说 ,机 械 外 什 骼 的 价格 郜 l 常 蹦 贸 ,比 E k s o B i o n i ( s GT的 售价 就 达 他 的机 械 外 什 ’ 骼 价卡 } f L 【 三 便 宜 , 比女 ¨【 { r wa l k R o b o l i t s公 I J 推 E k s o B i o n i ( 、 s( T相似 ,
试进 } 忮f 小移 动 ,传 感 器便 能 够 探 测 } 1 { 川 想 要 移 动 身 体 的 明 I 5 个部 分 ,从 运 行
电动 0 达 括l 1 J J 川r I 虹轻松地实脱 像 S a r a h r r h o n l a s 这样的病人≈周需 婴进行数 天
匝, 2 3 k g .
电 动 5 达 及 陀螺 仪 、弹 道 等 , 尤进 传 感 器 ¨ ‘ 造 它 是一 款 复 仃 种 行 走 模 』 I = .[ 】 f 1 订 英 4家 医 院 、荚 同 5 0家 医 院 投
外骨骼研究方法

外骨骼研究方法
外骨骼,乃人体之外之辅助装置,以增强肌力,缓减疲劳,或助残障者行步如常。
其研究方法,多端而深奥,吾试以文言述之。
首,观其构造,探其原理。
外骨骼之制,需明筋骨脉络,悉知关节转动,方能设计出合乎人体工学之器。
故学者宜先研习解剖学,熟读《黄帝内经》、《洗冤集录》等古籍,以了解人体结构之奥秘。
次,材料选择,亦为关键。
外骨骼之材,须轻而坚韧,方能减轻负担,又不失其坚固。
故需广览博采,从《天工开物》等书中,探求古人冶炼锻造之法,结合现代科技,选用合宜之材料。
再,动力系统,乃其核心。
外骨骼之动,或以电驱,或以液压,皆需精确控制,以适应人体动作之变化。
故此,研究者宜精通《周易》之变易之道,参悟阴阳五行之理,以期达到动静相宜,顺应自然。
终,实验验证,不可或缺。
外骨骼之效,非纸上谈兵可得,
必须亲身试穿,实践检验。
故学者当以《论语》中“知之为知之,不知为不知”的态度,虚心求教,勤于实践,不断改进。
外骨骼之研究,非一朝一夕之功,需融汇古今中外之智慧,结合理论与实践,方能成就一番事业。
愿吾辈学者,持之以恒,精益求精,造福人类,光大我中华文明。
人体下肢动力外骨骼模型的研究

人体下肢动力外骨骼模型的研究人体下肢动力外骨骼模型的研究近年来,随着人工智能和机器人技术的迅速发展,人体下肢动力外骨骼逐渐成为一个备受关注的研究领域。
人体下肢动力外骨骼是一种通过智能机器人技术和力学原理来辅助行走和运动的装置,被广泛应用于康复训练和辅助行动障碍者的生活。
本文将对人体下肢动力外骨骼模型的研究进行探讨。
首先,人体下肢动力外骨骼模型的研究对于改善生活质量和恢复行动能力的重要性不言而喻。
在理解人体运动机制的基础上,研究者们设计出了各种各样的外骨骼模型,旨在通过通过传感器和控制算法来模拟人体运动,从而实现对下肢的运动控制。
这些模型可以根据个体的不同需求进行定制,为使用者提供个性化的辅助行动。
其次,人体下肢动力外骨骼模型的研究涉及到多个关键技术的研发和应用。
首先是感知技术,通过传感器来感知使用者的运动意图和环境信息,实现外骨骼对使用者的准确控制。
同时,研究者们还开发了足底传感器、力矩传感器等用于测量地面反作用力和关节力矩的技术,以更好地模拟人体肌肉的运动。
另外,人体下肢动力外骨骼模型的研究还探索了多种控制算法来实现对外骨骼的精确控制。
例如,基于模型预测控制的算法可以预测使用者的运动意图,并实时调节外骨骼的助力和刚度参数以提供最佳恢复效果。
此外,研究者们还采用了神经网络和深度学习等先进的人工智能技术来实现对外骨骼的智能控制。
在人体下肢动力外骨骼模型的研究中,还有一个重要的课题是设计轻量、紧凑的机械结构。
由于需要与人体肌骨结合,外骨骼的重量和体积必须尽可能小,以便使用者能够自由行动。
研究者们通过材料选择、结构优化等手段,大大减轻了外骨骼的负重,提高了穿戴舒适度。
此外,还有一些研究者通过采用柔性材料和人体仿生设计的方法来模拟人体的运动,更好地适应人体的形态。
最后,人体下肢动力外骨骼模型的研究还面临着一些挑战和难题。
首先是与人体的协同性问题,即外骨骼在辅助行动时需要与使用者的肌骨有良好的接触和协同性。
写我发明了轻型外骨骼作文

写我发明了轻型外骨骼作文
我发明了一种可穿戴式轻型外骨骼,它能解决我们生活中一些令人头疼的问题。
这套外骨骼分为三部分,乍一看会以为这是一个普通的衣服,但实际上,除脑部贴片外,他们的内部都有一个由纳米材料制成的网格状支架,具有非常强的防水性和延展性,可适合不同体型的人。
通过强力的尼龙粘扣粘在一起。
这样即使外面的衣服破了,它也能装在另一件衣服上。
它的使用方法也很简单。
只需将两枚特殊贴片贴在太阳穴上,穿好衣服即可。
想控制这套外骨骼只需在大脑中想你要干什么,比如你在写作文,脑中不断有新灵感,但你写字速度很慢,怎么办?你只需想这些字,衣服上的无声马达开始运转,带动你的手飞快写出。
又比如你上学快迟到了,只需在脑中想:“快跑!”裤子上的马达开始运作,让你成为飞毛腿。
最棒的一点是它能自动躲避行人。
又比如你掉入河中,你只需想:“游泳!”这样即使你不会游泳它也能从动作库装载游泳动作,让你迅速学会。
你可能会想:“万一没电了怎么办?”他其实有两种充电方式,有线充电和人体自发热充电。
我的发明真是太神奇了,希望它能早日被研发出来。
人体外骨骼 辅助搬运介绍
人体外骨骼辅助搬运介绍全文共四篇示例,供读者参考第一篇示例:人体外骨骼技术是近年来发展迅猛的一项技术,它将工程学、生物学和医学结合在一起,通过智能机械设备将人体的运动过程进行辅助和增强。
在日常生活中,人们需要进行重物搬运的情况时常发生,这些重物搬运的任务不仅需要力气和技巧,还有很大的风险。
而人体外骨骼技术正是为了解决这些问题而被广泛应用的。
人体外骨骼技术可以有效减轻搬运工作的负担。
在搬运过程中,往往需要大量的体力投入,长时间的重复劳动不仅会造成身体的疲劳,还有可能引发各种各样的职业病。
而人体外骨骼设备可以通过机械的力量来帮助人体完成搬运任务,减轻人体的负荷,降低劳动强度。
这可以有效地保护工作者的健康,提高工作效率。
人体外骨骼技术可以提高搬运的安全性。
在搬运重物时,往往需要负责任和技巧,操作不当可能会造成意外伤害。
而人体外骨骼设备具有智能化的控制系统,可以根据不同任务的需求来调整力量和速度,避免因为力量过大而对重物损坏,也可以减少无谓的劳动损伤,提高工作的安全性和稳定性。
人体外骨骼技术还可以扩大工作范围和提高效率。
有些重物搬运任务需要在架空或狭小空间中进行,这些地方人体难以进入,并且搬运工作不方便,容易受伤害。
而人体外骨骼设备可以因为其机械化结构,在狭小空间中工作灵活,有效地延伸了工作范围。
人体外骨骼设备的运动速度和力量都可以根据需要进行调整,完成搬运任务的效率也会大大提高。
人体外骨骼技术在搬运重物方面具有显著的优势。
它可以减轻工人的负荷,提高工作的安全性,扩大工作范围,提高工作效率。
在未来的发展中,人体外骨骼技术还将有更广泛的应用,为人类的生产生活带来更多的便利和效益。
第二篇示例:人体外骨骼是一种辅助装置,可以帮助人们在搬运重物或者进行长时间工作时减轻负担,保护身体健康。
随着科技的不断进步,人体外骨骼的应用范围越来越广泛,可以用于医疗、军事、工业等领域。
在这篇文章中,我们将介绍人体外骨骼在搬运方面的应用及其优势。
关于外骨骼机甲的作文

关于外骨骼机甲的作文英文回答:Exoskeleton suits, also known as powered exoskeletons, are wearable robotic devices that augment human strength and capabilities. They are designed to provide a wide range of benefits, from enhancing mobility and strength to reducing physical strain and improving productivity. As technology advances, exoskeleton suits are becoming increasingly sophisticated, with the potential to revolutionize diverse industries and fields.Exoskeletons typically consist of a rigid frame worn over the user's body, actuated by motors or hydraulics to amplify and assist human movement. They can be tailored to specific applications, such as providing support for industrial workers performing heavy lifting, enhancing the mobility of individuals with physical disabilities, or increasing the agility and performance of soldiers in combat.One significant advantage of exoskeletons is theirability to augment human strength. By harnessing additional power, exosuits allow users to lift and carry heavier loads, perform tasks with greater force, and extend their endurance. This has the potential to transform industries such as manufacturing, construction, and logistics, by enabling workers to perform physically demanding tasks more efficiently and with reduced risk of injury.Another key benefit of exoskeletons is their potentialto enhance mobility. For individuals with physicallimitations or disabilities, exosuits can provide support and assistance for walking, standing, and other movements that may otherwise be difficult or impossible. This canhave a profound impact on their quality of life, enabling them to participate more fully in daily activities and improve their independence.Exoskeletons also offer the potential to improve productivity and efficiency in various occupations. In manufacturing and assembly environments, exosuits canenhance workers' precision and reduce fatigue, resulting in increased productivity and improved product quality. Similarly, in healthcare settings, exosuits can assist nurses and caregivers with patient handling and mobility, reducing strain and improving patient care.Furthermore, exoskeleton suits have the potential to revolutionize military operations. By providing enhanced strength, mobility, and protection, exosuits can augment the capabilities of soldiers, enabling them to perform more demanding physical tasks, traverse challenging terrain, and engage in combat with greater effectiveness. However, the ethical implications of using exoskeletons in military applications need to be carefully considered.As exoskeleton technology continues to advance, we can expect to see even more innovative and groundbreaking applications emerge. From assistive devices for individuals with disabilities to performance-enhancing tools for workers and soldiers, exoskeletons hold the promise of transforming our world in myriad ways. By leveraging the power of robotics and human ingenuity, exoskeleton suitshave the potential to enhance our physical abilities, improve our quality of life, and revolutionize industries across the spectrum.中文回答:外骨骼机甲。
人体外骨骼发展现状

1 绪论1.1 研究背景与意义在急速发展的现代社会,人们通常都会使用轮式交通工具运载沉重物体,但在实际生活中,有许多地方道路凹凸不平,轮式交通工具难以行进,由于人腿能适应较复杂路况的优点,使得行走助力装置应运而生[1]。
它是一种可以辅助人们行走的人机系统,它将人和两足步行机器人结合在一起,利用人的智能来控制机器人的行走,简化了自主行走式两机器人最为常见的步态规划和步态稳定性问题,同时它又可以提供动力协助人的行走,增强人们行走的能力和速度,缓解人在大负重和长时间行走情况下极易出现的疲劳感,大大扩大人们的运动范围,故可用于军事、科考、旅游、交通等各方面,具有广泛的应用前景。
在一些交通已经过于拥堵的城市,下肢步行外骨骼还可以作为一种新型的轻型环保交通工具,可以大大减少城市汽车流量,降低市区的堵车情况,减少城市的汽车尾气污染,减缓城市的停车压力,同时使用者还可以达到锻炼身体的目的[2]。
目前,行走助力装置主要应用于两方面:(1)用于负重、长距离行走时进行助力(2)用于老年人或下肢瘫痪者行走时进行助力。
行走助力装置的发展借鉴了腿式机器人、仿人机器人的技术和经验,又在结构、控制能力等方面做了深入的研究,经过不断的努力,现已开发出几类行走助力装置,并对相关技术做了深入的探讨,取得了一定的成果。
随着社会的发展和生活水平的提高,人们对医疗水平的期望值也越来越高。
而医疗水平的提高自然依仗医疗器械的更新和改善。
对于下肢受伤或有关节肌肉病患的病人来说,克服伤病需要借助适当的医疗器械帮助下肢逐渐恢复正常机能。
本文所介绍的正是出于此种目的,由多缸并联的气动步行助力器。
1.2 国际上下肢外骨骼的研究现状1.2.1 德国奥托博克(ottobock)的C-LEG智能仿生腿德国OTTOBOCK公司的最新产品智能仿生腿(C-LEG)是世界上第一个完全由电脑控制步态的假肢膝关节系统,能使配戴者稳定牢固的控制下肢运动。
智能仿生腿有两个电子传感器:一个位于小腿管中,分别测取脚跟踏地和脚前掌的压力,为假肢支撑期的稳定性控制提供信息。
人类负重外骨骼论文

人类负重外骨骼系统的液压系统设计姓名班级学号提交日期 2013年10月24日人类负重外骨骼系统的液压系统设计21世纪是一个机械化的时代,因为现代机器人所具有的机械动力装置使得机器人可以轻易地完成很多艰苦的任务,比如举起、搬运沉重的负载等,所以现代机器人控制技术有了长足的发展,但还远达不到人的智力水平,包括决策能力和对环境的感知能力。
与此同时,人类所具有的智能是任何生物和机械装置所无法比拟的,人所能完成的任务不受人的智能的约束,而仅受人的体能的限制。
因此,将人的智能与机器人所具有的强大的机械能量结合起来,综合为一个系统,将会带来前所未有的变化,这便是人类负重外骨骼。
人类负重外骨骼将人的灵活性、机动性、智能型与机器的强壮性完美地结合在一起。
在军用方面,它不仅能提高士兵的承载能力,还能提高士兵的行军速度,使士兵能够负重长途跋涉于车辆无法通过的地方;在民用方面它也具有广阔的前景:抗震救灾、建筑施工、作为下肢失调者的训练器及辅助行走装置等。
因此,研制人类负重外骨骼具有非常重要的现实意义。
人类负重外骨骼的原理就是用高功率密度的驱动装置,非刚性连接套在人体外,辅助人类肢体运动。
不过,在研制人类负重外骨骼的途中出现了一个瓶颈,就是如何研制一个体积小但功能强大的传动装置,一套灵敏但是又不能太灵敏的动作控制系统。
外骨骼必须成为士兵的机械影子,必须能及时地模仿他的每个动作,即使是毫秒的迟疑也会造成负担,让士兵感觉像行走在水中一样费力。
因此它的感应器必须能够以每秒几千次的速度读懂施加在它全身的每个轻微动作,它的微处理器必须足够强大,能把这些数据及时转换成指令传送给机械四肢,使它们与内部穿着者的行动协调一致,并且这过程中操作者的各种没必要的小动作以及动作过程中的不配合情况,还要由电脑“翻译”后以最有效的动作平滑地反应到机体上。
因此,人类负重外骨骼系统的液压系统设计变显得尤为重要。
人类负重外骨骼系统的液压系统由液压泵、液压缸、电磁转换阀、油箱、油管等元件组成。
讲课论文---外骨骼中文版

Robotic exoskeletons: a review ofrecent progressAbstractPurpose –This article aims to provide details of recent robotic exoskeleton developments and applications.Design/methodology/approach –Following an introduction, this article first considers some of the technological issues associated with anexoskeleton design. It then discusses military developments, industrial load-carrying applications and uses in healthcare. Progress inthought-controlled exoskeletons is discussed briefly, and finally, concluding comments are drawn. Findings –This article shows that, while military interests continue, the dominant application is to restore or enhance mobility to individualssuffering from disabilities or injuries. An emerging use is to increase the strength and endurance of industrial workers. The majority are lower-limbdevices, although some full-body exoskeletons have been developed, and most rely on battery-powered electric motors to create motion. Reflectingthe anticipated growth in applications, exoskeletons are now available from, or under development by, a growing number of commercialorganisations.Originality/value –This provides an insight into the latest developments in robotic exoskeletons and their applications.Keywords Healthcare, Military, Exoskeleton, RobotPaper type Technical paperIntroductionExoskeletons are powered robotic devices that can be worn byhumans to enhance their strength or restore movement.Developments are principally being driven by twoapplications: to increase the strength and load-handlingcapabilities of the able-bodied and to restore or enhance themovement and strength of individuals suffering fromdisabilities or injuries. Understandably, there has been muchinterest from the military, where the technology couldenhance the performance of personnel in the battlefield andalso assist in the rehabilitation of those injured in combat.Efforts to construct practical exoskeletons can be tracedback to 1965 when General Electric was commissioned by ajoint US Army/Navy initiative to develop the “Hardiman”,which was intended to allow the wearer to lift loads of 1,500pounds (680 kg). This never reached production due totechnological limitations of the day such as a lack ofhigh-speed signal processing and in the intervening half century, interest in exoskeletons had waxed and waned.Today, the technology is in its ascendancy, in part due to technological developments and also with the realisation that exoskeletons could confer real benefits to the disabled and a growing ageing population.Technological issuesA major difference between an exoskeleton and most otheforms of robot is that its motion and actions must followexactly those intended by its wearer. This requires advance position/force sensors, precise actuator control and high-spee signal processing. Data are then fed to a series of actuatorwhich create motion. While sensor and signal processin technologies are now sufficiently well-developed, the powe source often remains problematic, as there are currently few practical sources with sufficient energy density to sustain th operation of an exoskeleton for more than a few hours. Whilthis is usually adequate for lower-body, medical exoskeletonsit is insufficient for full-body/military applications. Availabl power sources include non-rechargeable and rechargeabl batteries and small internal combustion engines; all havin respective benefits and limitations. Electrochemical fuel cellare also being considered, and wireless energy transfer, a emerging technology, is another potential, longer-termsolution. Many research designs are tethered to a separatpower source, and for an exoskeleton that will not need toperate in a completely stand-alone mode, this may be acceptable.Actuators are also problematic in some applications. Standard hydraulic cylinders are powerful and capable of high positional accuracy but are heavy and the fluid has thepotential to leak. Although pneumatic systems are lighter, theyare generally too unpredictable for precise motion control. Electrical servomotors are compact, efficient andpower-dense, and by using high-gauss permanent magnetsand step-down gearing, they can provide high torque and fastand precise motion. Geared servomotors can also exploit electronic braking to maintain a steady position. Nevertheless, many alternatives are being considered, such as the families of “artificial muscles”, based on electroactive materials andshape-memory alloys and also, perhaps, in the longer term, nanomaterials. For example, in 2011, it was shown thattwisted carbon nanotubes could be actuated by applying an electric field.Another technological consideration is the materials used inthe main structure. These need to be light, yet rigid and strong, and not susceptible to fatigue, and while today steel and other metals such as titanium predominate, composites such as metal/polymer and carbon fibre, among others, are being investigated. A further issue is safety. Any system must safeguard the user from any potential heat sources or high voltages and, most importantly, from motion that exceeds the magnitude, direction or speed of natural human movement. The military interestThe benefits of increasing the load-carrying capacity and endurance of military personnel are obvious, and in 2000, DARPA, the US Defence Advanced Research Projects Agency, began a seven-year, $75-million programme entitled “Exoskeletons for Human Performance Augmentation”. It invited proposals for the development of a powered exoskeleton, and of the 14 designs submitted, it selected one from Sarcos, now part of Raytheon. The first prototype was the “XOS”, essentially a proof-of-concept device which used an internal combustion engine to power a series ofhigh-pressure hydraulic actuators. The complete unit weighed around 150 pounds (68 kg) and gave the wearer the ability tolift 200 pounds (91 kg). In 2010, the “XOS 2”was unveiled, which was lighter, faster and stronger than its predecessor, yet used 50 per cent less power. It also uses high-pressure hydraulics, is tethered to an external power source and enables its wearer to easily lift 200 pounds several hundred times without getting tired and to repeatedly punch through 3 inches of wood. It is understood that this development is no longer being funded by DARPA.Another military exoskeleton is the HULC (HumanUniversal Load Carrier), originally developed by Berkeley Bionics, now Ekso Bionics, and under military developmentby Lockheed Martin since 2009. In contrast to the XOS, thisis an un-tethered, battery-powered, lower-body rather thanfull-body exoskeleton. It allows users to carry loads of 90 kg for up to 20 km on a single battery charge over all terrains ata speed of 4 km/hour. The exoskeleton has a titanium frame and weighs 53 pounds (24 kg) without the batteries, which are lithium polymer types, and is hydraulically actuated. It can be equipped with a wide variety of mission-specific attachments and is capable of serving as a backbone for integrated systems such as armour, heating or cooling, sensors and other attachments. Most recently, an upgraded system with extended battery life and optimised control software has beenevaluated at the US Army Natick Soldier Research Development and Engineering Centre in Massachusetts. Figures 1 and 2 show the HULC in use by military personnel.The French company RB3D was founded in 2001 and is developing a range of exoskeletons. The first, Hercule, was designed in partnership with the Directorate General for Armaments, and the first military prototype was successfully demonstrated in 2011. This allows the user to carry 20 kg with each arm, and the battery provides about 20 km of travel at a speed of 4 km/hour. The company is now also involved with civil applications and recently launched Hercule V3, alithium-ion battery-powered, lower-body exoskeleton which is aimed at heavy load-carrying which is being tested on construction sites and in the manufacturing industry.Non-military strength enhancementExoskeletons clearly have the potential to help manipulating heavy loads in the non-military context, where they could assist factory, construction and other manual workers. This could be vital in nations with ageing workforces, such as Japan, where almost half of its agricultural workers are now 65 years or older. Other potential applications includefire-fighting, search and rescue operations and disaster response where humans equipped with exoskeletons might work alongside normally equipped first-responders or mobile Robots.In addition to RB3D, a number of other companies have previously developed products for these applications, such as the Hybrid Assistive Limb (HAL) from Cyberdyne (see below), and another Japanese company aiming to address these uses is ActiveLink, part of Panasonic. Founded in 2003, the company previously developed the MS-02 PowerLoader (Figure 3), a large, heavy, full-body exoskeleton with 22 servomotors that enabled users to lift 50 kg with each arm. Most recently, it has developed a smaller version, the Power Loader Lite (PLL-04), dubbed the “Ninja”(Figure 4), which is a lower-body exoskeleton, powered by lithium-ion batteries and weighs about 15 kg. The system uses the same “Direct Force Feedback System”architecture that was used in the original PowerLoader, whereby the magnitude and directionof the force exerted by each foot is measured using a pedal attached to a six-axis force sensor which allows the robot to follow naturally the motion of the operator’s legs. ActiveLink is planning to manufacture the first batch of 1,000 Power Loader Lite units, and sales are expected to start in early 2015.The company is co-operating with Mitsubishi Heavy Industries and Japan Atomic Power to develop exoskeletons for nuclear industry applications, and an experimental model could be available by 2017. ActiveLink suggests that this version could assist in the on-going clean up of the Fukushima Daiichi nuclear power plant, where workers are presently required to wear heavy, protective radiation suits while performing often difficult tasks.Korean Daewoo Shipbuilding and Marine Engineering is developing a full-body exoskeleton to assist workers to manipulate and carry heavy loads during the construction of ships. Produced from carbon fibre, aluminium alloy and steel, the prototype exoskeleton weighs 28 kg and allows the user to lift objects weighing up to 30 kg, and the eventual aim is to increase this to 100 kg. Prototypes using both electric motors and hydraulics have been developed, and the former can operate for up to 3 hours from its batteries. Trials have been conducted at Daewoo’s shipbuilding facility in Okpo-dong and feedback has been mostly positive, with the exoskeleton allowing users to lift heavy objects repeatedly and without strain, although all wanted it to move faster and be able to cope with heavier loads. On-going developments will address these issues.Medical applicationsIn 2012, it was estimated that over 270,000 people hadlong-term spinal cord injuries in the USA alone and that 21 per cent of these suffered from complete paraplegia. Worldwide, an estimated 185 million people use a wheelchair daily. Further, almost 20 per cent of the world’s population is now aged over 65 years, and this proportion is forecast to exceed 35 per cent by 2050. Accordingly, there is a growing need for devices that can assist the injured and elderly to enjoy a degree of independence and maintain a more active lifestyle. This has led to several companies developing lower-body, robotic exoskeletons that seek to allow paraplegics or wheelchair users to stand and walk and even climb stairs. The majority use battery-powered electric motors to actuate hip and knee joints and sometimes also the ankle joints, and are controlled by motion or other sensors and microcomputers. ReWalk Robotics, formerly ARGO Medical Technologies, was founded in 2001 and offers two products: the ReWalk Rehabilitation, launched in 2011, and the ReWalk Personal, which became available internationally in 2012. The ReWalk was developed by Dr Amit Goffer, an Israeli scientist whobecame quadriplegic after an accident in 1997. It consists of a metal brace that supports the legs and part of the upper body; electric motors that supply movement at the hips, knees and ankles; a tilt sensor; and a backpack that contains the computer and power supply (Figure 5). Crutches provide the user with additional stability when walking, standing andrising from a chair (Figure 6). Using a wireless remote control worn on the wrist, the user commands ReWalk to stand up, sit down or walk. In total, the system weighs 46 lbs (21 kg); however, it carries its own weight and the user only feels the weight of the backpack, which is approximately 5 lbs (2.3 kg). ReWalk has been tested extensively in the USA, Europe and Israel and is supported by the most published data of all exoskeleton systems in the rehabilitation market and is used by more people worldwide than all other exoskeletons combined. In June 2014, it was announced that the US Food and Drug Administration (FDA) had cleared the ReWalk Personal foruse at home and in the community.An allied product family is produced by Rex Bionics: the REX Rehab and REX Personal. REX (robotic exoskeleton) isa pair of robotic legs linked by a strong hip girdle (Figure 7) that enables a wheelchair user to stand up and walk, withsignificant weight bearing through the feet and requiring minimal physical effort. REX was designed specifically for users with high levels of mobility impairment, including paraplegics and quadriplegics, and allows them to navigate stairs and slopes safely. In contrast to the ReWalk, it does not require crutches or a walking frame to provide stability, so the user’s hands are free (Figure 8). The device is powered by DC motors and controlled by a simple keypad and joystick, and an on-board, interchangeable lithium-ion battery pack allows around 2 hours of continuous operation. The REX Personalhas 29 on-board processors and the Rehab has 27. In 2014,the company was acquired by Union MedTech plc.A new market entrant is Parker Hannifin, an industrial automation and motion control specialist who introduced a commercial version of the Indego Powered Leg Orthosis prototype at OTWorld 2014 in Leipzig, Germany. This arose from research at Vanderbilt University, with whom Parker Hannifin signed a licensing agreement in early 2013. The Indego is a battery-powered, lower-body exoskeleton that provides up to 4 hours of use and weighs 26 lbs (12 kg). It uses gyroscopes and other inertial sensors that allow it to mirror natural human movement; the user leans forward to initiatestanding or walking and leans backward to stop and sit. It features vibratory feedback, LED indicators and a wireless software interface which provides control over parameters such as stride length and step frequency. An Indego app for mobile devices allows the user to control operation, change settings and capture data. The commercial launch of Indego is planned for early 2015 in Europe and 2016 in the USA.Several other companies produce or are developing exoskeletons for medical applications. In addition to its military products (see previous text), Ekso Bionicsproduces a range of medical, lower-body exoskeletons; thefirst was the eLEGS and this has now been superseded bythe Ekso 1.1 and Ekso GT. Another is Cyberdyne, aspin-out from the University of Tsukuba, which producesthe HAL units. While several product generations and variants have been developed and many potential applications are envisaged, medical uses predominate. The company began renting the HAL unit for medical purposesin 2008, and by October 2012, over 300 HAL suits were in use by 130 medical facilities and nursing homes across Japan. In December 2012, Cyberdyne was certified by Underwriters Laboratories to ISO 13485, the international quality standard for medical devices, and in February 2013, the HAL suit received a global safety certificate, becomingthe first powered exoskeleton to do so. In August of thesame year, the unit received an European community (EC) certificate, allowing its use for medical uses in Europe. In contrast to most other exoskeletons, HAL uses sensors onthe user’s skin which detect the myoelectric signals which are sent from the brain to the muscles. These areinterpreted and converted into electronic signals which initiate the intended motion. Honda has been working on lower-body exoskeletons since the late 1990s and has developed several products which are aimed at those with walking difficulties rather than the fully disabled. These include the Bodyweight Support Assist (Figure 9) and the Walking Assist Device.Future prospects: control by thoughtIn an ideal situation, an exoskeleton would be controlled by the user’s thought processes rather than by detecting forces or small movements that may be lacking in the severely disabled. This capability involves developments in brain–computer interface (BCI) technology that is the topic of a global research effort (see Vol. 37 No.2). Extensive efforts are being made toapply BCI to robotic prosthesis, and several research groupsare now investigating its application to medical exoskeletons.An example is the recently completed, 41-month, European Union-funded “Mindwalker”project. This aimed to develop a lower-limb exoskeleton that could be controlled by the user’s brain signals. The key to this is novel BCI technology based on non-invasive, dry contact electroencephalographic (EEG) sensors on the user’s head and electromyographic (EMG) sensors on the shoulders. Signals were processed using the dynamic recurrent neural network (DRNN) technique.During the course of the project, the sensors, together with appropriate control algorithms, were developed; the powered lower-limb exoskeleton was manufactured and tested withspinal cord-injury patients; an immersive 3D virtual environment for training patients was developed; and a seriesof clinical trials were completed.A French research team from commission for atomic energy and alternative energies (CEA) LIST is working on a full-body exoskeleton, the EMY (Enhanced Mobility), which uses BCI technology and aims to restore mobility to quadriplegics. The present prototype weighs about 60 kg and uses 20 electric motors to power the four limbs. In contrast to the above, this uses an invasive BCI technology, whereby an implant, the Wimagine,will be inserted on the surface of the brain’s motor cortex, the region responsible for voluntary movements. Wimagine is a5-cm-diameter, wirelessly powered device with 64 sensors that constantly record and broadcast electrical brain activity. It allows the radio frequency transmission of 32 channels (of the 64 available), sampled at 1 kHz per channel with a 12-bit resolution. The device is powered wirelessly through an inductive link at 13.56 MHz that is able to provide 100 mW. A key aspect of this research is the interpretation of the data acquired by the Wimagine, and several more years will be required before the exoskeleton becomes a practical reality.Concluding commentsAlthough originally developed with military applications in mind, the main use for exoskeletons in the short term will be medical rehabilitation, and the recent FDA approval of the ReWalk Personal System and the growing uses of the HAL are the first steps towards widespread deployment. In the longer term, progress in BCI technology will allow thought-controlled units to be developed. Industrial load-carrying applications are poised to make a real impact and will boost productivity. Conceivedinitially as a means of loading bombs onto aircraft, exoskeletonsare now playing a more humanitarian role and will contribute to improving the quality of life of countless disabled and injured individuals and potentially reduce the incidence of occupational injuries for manual workers across a broad range of industries. Corresponding authorRobert Bogue can be contacted at: robbogue@。
下肢助力外骨骼机构设计与研究 (硕士论文)
下肢助力外骨骼机构设计与研究
RESEARCH AND MECHANISM DESIGN OF LOWER LIMB POWER EXOSKELETONS
(全日制工程型)
蒋靖
哈尔滨工业大学 2012 年 7 月
国内图书分类号:TP242.6 国际图书分类号:621
学校代码:10213 密级: 公开
摘
要
外骨骼研究已成为国内外机器人技术领域研究的热点。外骨骼机器人能 够 有 效结 合 人 类 的 智 慧 和 机器 人 的 强 壮 , 让 复 杂环 境 下 的 负 重 难 题 不复存 在。随着单兵作战装备重量的提高,一款适用于士兵穿戴,能有效提高士兵 负重能力,且适用于各种复杂环境的外骨骼机器人具有极大的应用前景。本 论文围绕下肢助力外骨骼的机械驱动系统设计、运动学和动力学分析、传感 系统设计及仿真和实验等关键问题进行了深入的研究。 在对人体下肢运动机理进行仔细分析的基础上,本论文对下肢助力外骨 骼的机械驱动系统进行了设计和研究。根据仿生设计的方法,对外骨骼的髋 关节、膝关节和踝关节等结构进行了设计,并对髋关节、大腿连杆、小腿连 杆等关键零部件进行了有限元力学分析;最后结合关节肌肉运动机理,对外 骨骼液压驱动系统方案进行了设计。 针对外骨骼机械结构,本论文对下肢助力外骨骼进行了运动学及动力学 分析。对外骨骼机械腿进行 D-H 建模,求解运动学正解,采用微分变换法 求雅克比矩阵。然后采用拉格朗日功能平衡法,对外骨骼进行动力学求解。 根据外骨骼整体结构和控制策略,本论文对下肢助力外骨骼的传感系统 进行了设计。通过分析人体足底压力分布信息,对压力传感器进行了选取和 布位,并设计传感鞋,保证采集压力的可靠性和传感器的安全性。选取了合 适的关节转动角度传感器,实现对外骨骼进行准确的控制。 最后,本论文对下肢助力外骨骼进行了仿真分析及实验研究。仿真分析 主要包括关节仿真和行走仿真;实验研究则包括穿戴舒适性试验、关节 信息 采集实验、步态信息采集实验和外骨骼关节驱动实验等。仿真与实验结果表 明,下肢助力外骨骼机械结构设计合理可靠、穿戴舒适,能够满足外骨骼负 重和灵活性要求。 关键词:下肢助力;外骨骼机器人;结构设计;运动学与动力学
人类负重机械外骨骼HULC
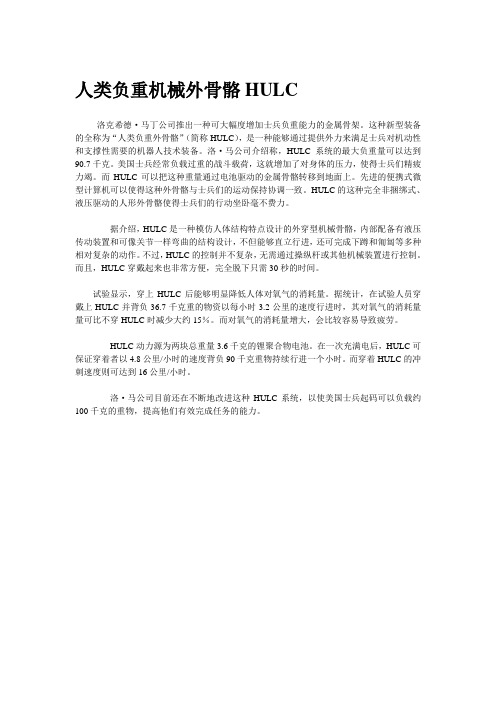
人类负重机械外骨骼HULC洛克希德·马丁公司推出一种可大幅度增加士兵负重能力的金属骨架。
这种新型装备的全称为“人类负重外骨骼”(简称HULC),是一种能够通过提供外力来满足士兵对机动性和支撑性需要的机器人技术装备。
洛·马公司介绍称,HULC系统的最大负重量可以达到90.7千克。
美国士兵经常负载过重的战斗载荷,这就增加了对身体的压力,使得士兵们精疲力竭。
而HULC可以把这种重量通过电池驱动的金属骨骼转移到地面上。
先进的便携式微型计算机可以使得这种外骨骼与士兵们的运动保持协调一致。
HULC的这种完全非捆绑式、液压驱动的人形外骨骼使得士兵们的行动坐卧毫不费力。
据介绍,HULC是一种模仿人体结构特点设计的外穿型机械骨骼,内部配备有液压传动装置和可像关节一样弯曲的结构设计,不但能够直立行进,还可完成下蹲和匍匐等多种相对复杂的动作。
不过,HULC的控制并不复杂,无需通过操纵杆或其他机械装置进行控制。
而且,HULC穿戴起来也非常方便,完全脱下只需30秒的时间。
试验显示,穿上HULC后能够明显降低人体对氧气的消耗量。
据统计,在试验人员穿戴上HULC并背负36.7千克重的物资以每小时3.2公里的速度行进时,其对氧气的消耗量量可比不穿HULC时减少大约15%。
而对氧气的消耗量增大,会比较容易导致疲劳。
HULC动力源为两块总重量3.6千克的锂聚合物电池。
在一次充满电后,HULC可保证穿着者以4.8公里/小时的速度背负90千克重物持续行进一个小时。
而穿着HULC的冲刺速度则可达到16公里/小时。
洛·马公司目前还在不断地改进这种HULC系统,以使美国士兵起码可以负载约100千克的重物,提高他们有效完成任务的能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人类负重外骨骼系统的液压系统设计
姓名
班级
学号
提交日期 2013年10月24日
人类负重外骨骼系统的液压系统设计21世纪是一个机械化的时代,因为现代机器人所具有的机械动力装置使得机器人可以轻易地完成很多艰苦的任务,比如举起、搬运沉重的负载等,所以现代机器人控制技术有了长足的发展,但还远达不到人的智力水平,包括决策能力和对环境的感知能力。
与此同时,人类所具有的智能是任何生物和机械装置所无法比拟的,人所能完成的任务不受人的智能的约束,而仅受人的体能的限制。
因此,将人的智能与机器人所具有的强大的机械能量结合起来,综合为一个系统,将会带来前所未有的变化,这便是人类负重外骨骼。
人类负重外骨骼将人的灵活性、机动性、智能型与机器的强壮性完美地结合在一起。
在军用方面,它不仅能提高士兵的承载能力,还能提高士兵的行军速度,使士兵能够负重长途跋涉于车辆无法通过的地方;在民用方面它也具有广阔的前景:抗震救灾、建筑施工、作为下肢失调者的训练器及辅助行走装置等。
因此,研制人类负重外骨骼具有非常重要的现实意义。
人类负重外骨骼的原理就是用高功率密度的驱动装置,非刚性连接套在人体外,辅助人类肢体运动。
不过,在研制人类负重外骨骼的途中出现了一个瓶颈,就是如何研制一个体积小但功能强大的传动装置,一套灵敏但是又不能太灵敏的动作控制系统。
外骨骼必须成为士兵的机械影子,必须能及时地模仿他的每个动作,即使是毫秒的迟疑也会造成负担,让士兵感觉像行走在水中一样费力。
因此它的感应器必须能够以每秒几千次的速度读懂施加在它全身的每个轻微动作,它的微处理器必须足够强大,能把这些数据及时转换成指令传送给机械四肢,使它们与内部穿着者的行动协调一致,并且这过程中操作者的各种没必要的小动作以及动作过程中的不配合情况,还要由电脑“翻译”后以最有效的动作平滑地反应到机体上。
因此,人类负重外骨骼系统的液压系统设计变显得尤为重要。
人类负重外骨骼系统的液压系统由液压泵、液压缸、电磁转换阀、油箱、油管等元件组成。
液压泵为动力元件,它向整个液压系统提供动力;液压缸为执行元件,其作用是将液压油的压力能转化为机械能,驱动外骨骼各肢节绕关节轴转动;电磁转化阀为控制元件,它根据人体运动状态的转化来控制和调节液压油的流量和方向,从而驱使外骨骼与操作者的运动协调一致;油箱、油管等是辅助元件,其作用是保证人类负重外骨骼的整个液压系统安全可靠地工作。
液压系统框图如下,采用泵控的方式,结合电磁转换阀进行液压驱动。
(1)液压泵的参数设计
上图是将60KG负载重量和自重转化成60KG人后膝关节和扭矩的变化。
然后通过几个常用液压计算公式,来推导液压元件的参数。
)3.( (612)
/)2.(....................)
1.(.....................
max min max s s s des l s l
pus h s Q P W A R Q A R T P ===
θ
其中s P 为输出扭矩,s Q 为泵的流量,s W 为电机功率,push T max 为关节的最大扭矩,
min max R R 和分别为机腿的最大力臂和最小力臂,l A 为液压缸的面积。
(2) 液压缸的参数设计
上图是液压缸的结构示意图。
液压缸需要很快的响应速度,较小的尺寸,同时输出力要很大,需要很高的强度。
①液压缸缸体长度bore L 和活塞杆长度rod L
这是根据机械腿的尺寸和运动范围决定的。
液压缸的最大行程L L 是机械腿膝关节在︒0时,最小行程s L 是膝关节在︒
90时,一般参考如下两个约束:
)2.......(..........)
1.......(..........bore rod L bore rod S L L L L L L +≤-≥
②缸桶内径D 和活塞杆直径d
通常,根据液压缸工作压力不同,缸桶内径D 和活塞杆直径d 的关系如下表所示:
③桶壁厚度0δ
根据强度校核公式:p
D
p σδ2max 0= 得桶壁厚度0δ
其中p σ为缸桶材料的许用应力。
(3)油泵的参数设计
由于要求外骨骼的自重小,输出功率大,所以需要选择体积小,输出功率大的油泵。
油泵在液压系统中起着十分重要的作用,它把电机输出的机械能转换成机油的液压能。
①确定泵的额定压力和额定流量
通过查找手册,一般油泵的工作压力取m a x )5.13.1(P P b -≥,工作流量取m a x
)3.11.1(Q Q b -≥。
由于液压油路中采用泵阀混合控制,对油泵的要求较高,故取max 5.1P P b ≥,max 3.1Q Q b ≥。
②确定驱动该泵的电机功率P 根据经验公式612
b
b Q p P = 得电机功率P 。
(4)转换阀的选择
转换阀作为控制元件,其性能对于液压系统很重要。
人类负重外骨骼的关节液压控制要
求具有高响应速度、工作可靠稳定、能适应恶劣环境的特点。
因此,在转换阀选型是必须要考虑以下几点:
(1)动作灵活,作用可靠,工作时冲击和振动小;
(2)油流过时压力损失小;
(3)密封性能好;
(4)结构紧凑,安装、调试、使用、维护方便,通用性好;
(5)具有良好的电液接口;
通过综合考虑,选择高速电磁阀,是一种比较理想的接口元件。
以上是我关于人类负重外骨骼能想到的方面,再结合了网上的资料,写出了该文章。