稳定平台系统设计要点
软件平台设计技术方案

软件平台设计技术方案一、项目背景随着信息技术的飞速发展,软件平台作为企业信息化建设的重要基础设施,已经成为企业提升核心竞争力、实现业务创新的关键手段。
为了满足企业日益增长的业务需求,提高系统稳定性、安全性和可扩展性,降低开发成本,提高开发效率,特制定本软件平台设计技术方案。
二、总体设计原则1. 遵循国家相关法律法规,符合行业标准和规范;2. 坚持以用户需求为导向,注重用户体验;3. 保证系统的高性能、高可用性和可扩展性;4. 采用成熟、稳定的技术架构,降低技术风险;5. 注重系统安全,确保数据安全和用户隐私;6. 强调代码的可读性、可维护性和可复用性;7. 建立完善的开发、测试、运维体系,提高系统质量。
三、技术选型1. 开发语言:Java、Python、C等;2. 数据库:MySQL、Oracle、MongoDB等;3. 服务器:Apache、Nginx、Tomcat等;4. 前端框架:Vue.js、React、Angular等;5. 后端框架:Spring Boot、Django、.NET Core等;6. 容器技术:Docker、Kubernetes等;7. 持续集成与持续部署(CI/CD):Jenkins、GitLab CI等;8. 代码管理工具:Git、SVN等;9. 服务器端编程:Node.js、Express、Spring MVC等;10. 移动端开发:Android、iOS、React Native等。
四、系统架构设计1. 分层架构:采用分层架构,将系统分为表现层、业务逻辑层、数据访问层和基础设施层,实现各层的解耦和独立部署;2. 微服务架构:将系统拆分为多个独立的服务,每个服务负责一个特定的功能,实现服务之间的解耦和独立部署;3. 分布式架构:采用分布式架构,实现系统的高可用性和可扩展性;4. 集成架构:通过API接口、消息队列、事件总线等技术,实现系统内部及与其他系统的集成;5. 安全架构:采用多层次的安全防护措施,包括身份认证、授权、数据加密、访问控制等。
舰船稳定平台振动分析与减振设计

稳 定 跟踪 平 台是 惯性 技 术应 用 的重 要 领 域之 一 ,其 特有 的功 大 , 因为 ∞过 大也 就 意味着 减 振器 件 的刚度 要 做得 非 常 小, 振装 减 能是 隔 离载 体 ( 辆 、 机 和 舰 船) 角运 动 , 被稳 定对 象 ( 光 置要 设计 得很 软 ,减振 器 的振 动 位移 也 就 很大 ,其 体 积就 会 非常 车 飞 的 使 如 学镜 头 、 光和 雷达 天 线 等) 对 某方 位 保 持 稳 定 , 对 目标 进 行 大 , 备 稳定 性也 就变 差 , 易受 外界 干扰 而 摇 晃 。一 般实 际采 用 激 相 并 设 容 自动跟 踪 , 以在 现 代武 器 系统 和 民用 设备 中得到 了广 泛 的应 用 。 的频 率 比常 在 2 5 间 , 时相 应 的减 振 效 率 卢 ( ) 0%, 所 ~ 之 此 卜田 ×10
接 影 响到 系统 的稳 定 性和 可 控 性 , 要 对平 台进 行 频 率分 析 , 需 以满 系 统共 振 时振 幅放 大 不多 , 一方 面又 要 保证 有满 意 的减 振效 果 。 另 足 控制 对 减振 的要求 。 在振 动 分析 基础 上 , 文还 将 进行 减振 器 的 本 对 于舰 载 设备 来 说 , 使用 环 境 比较 恶劣 , 其 是舰 载 光 电稳 其 尤 参 数设 计 与减 振 效果 测试 。 定 平 台 , 种振 动 经过 弹 性构 件传 递到 平 台基 座 , 而 引起 平 台环 各 从 1 振 动 分 析 减 振就 是 将振 动源 和 需要 防 振 的物 体之 间 用弹 性 元件 和 阻尼 元 件加 以隔离 , 中 , 需 要 防振 的物 体 单独 与 振源 隔 开称 为 被 动 其 将 减 振 。 1为一 单 自由度 被 动减 振 的 图 简 化模 型 。
稳定平台控制系统阐释

稳定平台控制系统阐释红外导引头接收目标的红外辐射,经光电转换和信号处理后,给出目标相对于导弹的方位、角速度等信息,产生目标相对于导引头光轴的误差信号,用以驱动伺服机构,控制导弹飞向目标并击中目标。
综合考虑结构尺寸限制、性价比及总体战术技术指标要求等诸多因素,设计采用两通道飞行姿态控制系统,分别稳定、控制搜索和跟踪时绕质心的方位和俯仰运动。
各通道组成基本相同,都是由感应装置、校正装置和伺服机构组成。
第一,感应装置,用于测量导弹飞行姿态的变化并输出相应信号。
该系统由角位移传感器、稳定平台和单自由度速率陀螺仪等组成。
其中角位移传感器的功能是把机械位移量角度转换成电信号,且输出的电信号与输入的角度线性相关;稳定平台提供测量坐标基准,利用弹体相对平台框架的转动产生姿态角信号;单自由度速率陀螺仪是利用陀螺的进动性来测量敏感轴方向的姿态角速率,其输出电压信号与输入角速度成正比,经换算给出姿态角变化信号。
第二,校正装置,用于将各通道姿态角、姿态角速率及制导指令按一定控制规律进行运算、校正、调制、放大、输出控制信号。
第三,伺服机构,用于将电信号转换成机械动作。
弹上主要有两种伺服机构,其作用分别是:根据控制信号驱动稳定平台,使视轴对准目标;根据姿态偏差信号驱动舵机,产生使弹体绕质心运动的控制力矩,稳定或控制飞行姿态。
感应装置、变换放大装置和执行机构等与弹体一起构成姿态控制闭环回路,控制系统原理如图1所示:当制导指令(控制电压)为零时,如果在干扰力矩作用下弹体姿态角发生变动,则感应装置根据其变化,经回路负反馈产生控制力矩与干扰力矩相平衡。
干扰力矩消除后,控制力矩自动消失,从而使姿态角保持稳定。
当制导指令信号不为零时,信号经闭环回路产生控制力矩,驱动伺服机构相应动作,以实现飞行控制。
1 跟踪系统工作原理红外成像跟踪系统主要由热像仪、图像处理器和稳定平台控制系统三部分组成。
热像仪作为跟踪测量装置由光学系统(整流罩、主镜、次镜、滤光片)、调制盘、红外探测器、制冷器、图像非均匀校正机构及输出电路等组成。
火控系统稳定平台设计与仿真分析

火控系统稳定平台设计与仿真分析火控系统是指用于控制武器系统的一种系统,主要用于控制、指导和管理火炮、导弹等武器的射击与攻击。
如今,随着科技的发展和战争形态的变化,火控系统在现代军事中发挥着越来越重要的作用。
本文将就火控系统稳定平台的设计与仿真分析进行探讨。
首先,稳定平台是火控系统中的重要组成部分,其设计直接关系到火控系统的性能和稳定性。
稳定平台的作用是使火炮、导弹等武器能够在运动状态下保持稳定,确保射击精度和命中率。
稳定平台的设计需要考虑多种因素,包括结构强度、稳定性、抗震性能等。
另外,稳定平台还需要与其他火控系统组件进行协同工作,如传感器、控制系统等。
稳定平台的设计与仿真分析是一种有效的方法,可以通过模拟实际情况,评估设计的稳定平台在不同工况下的性能表现。
仿真分析可以通过计算机模型和数学模型,模拟火控系统在各种环境下的运动状态、振动变化等。
通过对稳定平台的仿真分析,可以优化设计,提高稳定性和抗干扰能力。
稳定平台的设计与仿真分析需要考虑多种因素,包括平台结构、传感器安装位置、控制和调节机构等。
首先,平台的结构设计应考虑载荷的分布和传递,以确保整个系统的稳定性和强度。
传感器的安装位置也需精确计算,以保证传感器能够获取准确的数据,并及时反馈给控制系统进行调节。
其次,控制和调节机构的设计与仿真分析也是关键。
控制系统需要能够实时感知平台的姿态变化,并通过控制和调节机构对平台进行稳定控制。
仿真分析可以模拟平台在不同姿态下的动态响应,进而评估控制系统的性能和稳定性。
通过仿真分析,可以对控制系统的参数进行优化,提高系统的控制精度和稳定性。
另外,稳定平台的仿真分析还可以对火控系统的整体性能进行评估。
通过模拟射击和攻击过程,可以分析火炮、导弹等武器的精度和命中率,并优化设计以提高射击精度和命中率。
此外,仿真还可以模拟不同环境条件下的干扰,评估火控系统对干扰的响应能力,从而提高系统的抗干扰能力。
总结起来,火控系统稳定平台的设计与仿真分析是一项复杂而重要的工作。
雷达天线稳定平台伺服系统设计与仿真

及正 方 向。
( )甲板坐 标系 0一Xr c r,O 一 船艏 艉 1 YZ Xc 方 向,船艏 为正 ;0Y 一 垂直 甲板 平面 ,向上 为正 ; c O , 按 右手法 则 定义 。当无摇 摆时 ,目标 在 甲板 Z 一
差 ,常 采 用 机 械 稳 定 或 电气 稳 定 的方 法 来 隔离 船
De in a d S mu ain o d r tn aS a i z dP af r S r o S se sg n i lt nRa a e n tb l e lt m e v y tm o An i o
H UANG a g n Li n big
Ab t a t s r c :Th n u n e cu e y s n fs i n tem e srme tpe iin i a ay e n ti a e,te o eai g e if e c a sd b wig o hp o h aue n r cso s n lz d i hsp p r h p rt l n
} 1
● ●
量 驽
一
一
、
㈠_ _ ¨_ 『
●
,
一
一
_
_ _ I
1
0
一
f
f
●
l I _
一
~ 一
O 5
_
、
l I
l
l
_
、● _ _ _ l 一 _一 __二 _ _l . I __二 V f _ l 二 f= l = _ ● l _ ¨ .
21 0 2年
控制 方 式 的优 点 是使伺 服 电机 出于微 振状 态 ,可 以 减 小 电机 死 区 ,改 善 静 态 精 度 和 低 速 运 行 的平 稳
基于PLD稳定平台控制系统的设计
制系 统 的 设 计及 仿 真 。稳 定 平 台控 制 系统 主要 由光 纤 陀 螺 仪 信号 采 集 电路 、光 电编 码 器 信 号 检 测 电 路 、伺 服 电机 驱 动 电 路 、接 口电路 和 控 制 计算 机 五个 部 分 组 成 。 光纤 陀 螺 仪 感 知 稳定 平 台 3轴 转 动 扰 动 。 P / 0 C 14控 制 计 算 机分 析 光 纤 陀 螺 仪 的信 号 控 制 伺 服 电 机 运转 补 偿 载 体 的 扰 动信 号 。3个 光 电 编 码器 检测 稳 定 平 台补 偿 误 差 , 以 实 现 天 线 指 向稳 定 。仿 真 结 果 表 明该 稳 定 平 台 控 制 系 统 设 计 正确 。
s s e f rs a l lt o m a e n P D.Th o t o y t m fs a l l to m i l o ss s o i e cr y t m o t b e p a f r b s d o L ec n r l s e o t b e p a f r ma n y c n it f v i— s f
c is:s g a a he i g cr ui o i e tc lg r ut i n lg t rn ic t ffb rop ia y o,sgn t c i n cr u to nc e i al de e to ic i fe od r,d i ic to r rvec r ui fSe — V o o ,i t r a e cr ui a o r lc mpu e . Fi e p ia y os d t c s r t ton o t bl l to m — O m t r n e f c ic t nd c nt o o tr b r o tc lg r e e t o a i fs a e p a f r a
导引头稳定平台控制回路设计分析

s e d o i h n l n e o p i g a d t e r q ie n o o t o y tm r n f rf n to r n l z d p e n sg ta g ea d d e u ln n h e ur me tf rc n r ls s e t a s e u c i n we e a a y e .Th n l — ea ay s sl y t e r t o n a in f rmo o u p tt r u n y o r n e s l ci n a d d sg f o t o y tm r n f rf n — e a h o e i f u d t o t ro t u o q ea d g r a g e e to n e i n o n r ls se t a s e u e c o c
图[ , 1 主要 由稳定 和跟 踪两 回路组 成 。稳 定 回路 3
是 内 回 路 , 常 采 用 速 率 陀 螺 反 馈 , 可 以 敏 感 常 它
头与一 般伺 服 系 统 的 主 要 区别 就 是 在 跟 随 目标 的 同时要 隔离 载 体 扰 动 对 导 引头 产 生 的视 线 角
弹体 姿态 扰动 的角 速度 , 使稳 定平 台朝 弹体姿 态 扰 动的 相反方 向运 动 , 以隔 离 弹体 的扰 动 。跟踪 回路是外 回路 , 中 目标 探测 和 角度 鉴 别经 常有 其 多种形 式 , 如激 光 、 图像 、 米波 及 各种形 式 的复 毫
ton The d g t lsm u a i ys e wa it b s d o he a l e . The dgia i u a in e u ts ow s e t rde ou— i . i ia i l ton s t m s bu l a e n t nays s i t ls m l to r s l h b te c pin s a hiv d i i n i g i c e e n sghta gulr s e d out t a p e pu . K e wor s: e ke ; d c pln y d s e r e ou i g; sg ngu a p e I AE Is t m i hta lr s e d;T I yse
平台搭建实施方案

平台搭建实施方案一、概述。
平台搭建是指根据特定需求,在一定的技术条件下,利用特定的软硬件资源,构建一个满足特定功能的系统平台。
平台搭建实施方案的制定对于系统的稳定运行和功能的完善起着至关重要的作用。
在本文档中,我们将详细介绍平台搭建实施方案的具体步骤和注意事项。
二、平台搭建实施方案的步骤。
1.需求分析。
首先,我们需要对平台搭建的需求进行深入分析。
这包括对系统功能、性能、安全性等方面的需求进行详细的调研和分析,确保我们对平台搭建的目标有清晰的认识。
2.技术选型。
在需求分析的基础上,我们需要进行技术选型。
根据需求分析的结果,选择合适的软硬件资源,确定平台搭建所需的技术方案,包括操作系统、数据库、开发语言等。
3.系统设计。
在技术选型确定后,我们需要进行系统设计。
这包括对系统架构、模块划分、接口设计等方面进行详细的规划和设计,确保系统的稳定性和可扩展性。
4.开发实施。
系统设计完成后,我们将进入开发实施阶段。
在这一阶段,我们需要按照系统设计的规划,进行系统的开发和实施工作,包括编码、测试、部署等环节。
5.系统测试。
开发实施完成后,我们需要进行系统测试。
这包括功能测试、性能测试、安全测试等方面的测试工作,确保系统的稳定性和安全性。
6.系统上线。
系统测试通过后,我们将系统上线。
在系统上线的过程中,我们需要进行系统的部署和配置工作,确保系统能够正常运行。
7.系统维护。
系统上线后,我们需要进行系统的维护工作。
这包括对系统的监控、故障处理、性能优化等方面的工作,确保系统能够持续稳定运行。
三、平台搭建实施方案的注意事项。
1.需求变更管理。
在平台搭建的过程中,需求可能会发生变化。
我们需要建立起有效的需求变更管理机制,确保变更的及时和有效性。
2.风险管理。
在平台搭建的过程中,可能会面临各种风险。
我们需要建立起有效的风险管理机制,及时识别和处理各种风险,确保项目的顺利进行。
3.团队协作。
平台搭建是一个复杂的工程,需要多个团队的协作。
软件平台建设方案

软件平台建设方案一、方案背景随着信息技术的迅猛发展,软件平台在各个领域的应用也越来越广泛。
本文将围绕软件平台的建设方案展开论述,旨在提供一种有效的解决方案,以满足各种需求和提升工作效率。
二、目标及需求分析(1)目标:- 提供稳定可靠的软件平台,满足各种业务需求。
- 提高软件平台的安全性和可扩展性。
- 提升团队成员之间的协作效率。
(2)需求分析:- 必须具备高效的数据存储与处理能力。
- 必须有良好的用户界面,提供友好的操作体验。
- 需要支持多平台和多终端设备的访问。
- 必须保证系统的安全性和稳定性。
三、系统设计与架构基于以上目标和需求分析,我们提出如下软件平台建设方案:(1)硬件设备:- 服务器:选用高性能的服务器硬件设备,保证系统的稳定性和可靠性。
(2)操作系统:- 选择经典的操作系统作为基础,如Linux、Windows等。
(3)数据库:- 选择支持高并发和大规模数据存储的数据库系统,如MySQL、Oracle等。
(4)开发语言与框架:- 根据需求选择合适的开发语言和框架,如Java、Python、Spring等,以保证高效开发和维护。
(5)系统架构:- 借鉴微服务架构,将系统拆分为多个独立的服务,以提高系统的可扩展性和容错性。
四、关键技术与功能模块(1)关键技术:- 分布式存储技术:使用分布式存储系统,实现高效的数据存储和读写。
- 容器化技术:使用容器技术,提供快速部署和升级的能力。
- 大数据处理技术:应用大数据处理技术,实现数据的分析和挖掘。
(2)功能模块:- 用户管理模块:实现用户的注册、登录、权限控制等功能。
- 数据管理模块:提供对数据的增删改查操作,支持数据的导入和导出。
- 任务调度模块:实现任务的调度和分配,提高工作效率。
- 统计分析模块:基于大数据处理技术,实现数据的统计和分析功能。
- 安全管理模块:保障系统的安全性,包括访问控制、数据加密等。
五、项目实施计划(1)需求分析:明确项目需求和目标,并编写详细的需求文档。
球载雷达稳定平台设计综述

各组 成 部 分 的 体 积 重 量 。这 就 要 求 稳 定 平 台 自重 较 轻 、 积 较小 。在 减轻 自重 与 体 积 的 同时 考虑 其 结 构 体
此 , 制一 台性 能优 良 、 研 可靠 性高 的稳 定平 台是 球 载雷
与 实现 方法 , 对类似 的应 用具有 一 定的参 考 意义 。 关键 词 : 定平 台 ; 动 控制 ; 载 雷达 ; 稳 被 球 粘滞 流体 阻尼 器 中 图分类 号 : N 5 .3 T 9 9 7 文献标 识码 : A 文 章编 号 :0 8— 3 0 2 1 ) 3— 0 5— 4 10 5 0 ( 0 0 0 0 0 0
a l ai n e p af r ;p s ie;a rh p r d r lu d v s o sda e sa l l t m o a sv is i a a ;f i ic u mp r
0 引 言
稳定平台是球载雷达系统 的重要组成部分 , 其性
21 0 0年第 2 6卷第 3期
2 0. 126 No. 01 Vo . 3
电 子 机 械 工 程
Elcr e to—M e h nc l gn e ig c a ia En i e rn 5
球 载 雷 达 稳 定 平 台设 计 综 述
钱 海 涛
( 中国 电子 科技 集 团公 司第 三十 八研 究所 , 安徽 合 肥 20 8 ) 30 8
摘 要 : 主要介 绍 了球 载 雷达稳 定 平 台的作 用 、 点 、 特 类型 、 工作 原理 及 关键技 术 。根 据球 载 雷达 系统 的
使 用环境 与技 术要 求 , 引入 了阻尼技 术 , 通过 参 数 分析 与 结 构 设 计 , 功 研 制 了被 动控 制 式稳 定 平 台。 成 对被 动控 制 式稳 定平 台的设 计 方法 与 工程 化 过程进 行 了 简单 的 阐述 , 并针 对 关键技 术给 出 了解 决 方案
基于dSPACE的陀螺稳定平台开发与测试系统设计

( h rA rM i i e e r h l s i t fC ia T eAi i s l R sa c n i t eo hn — se tu
L oa g4 10 。C ia u y n 7 0 0 hn )
旦
盛墨旦
d i1 . 9 9 j i n 1 7 —0 1 2 1 . 1 0 0 o :0 3 6 / . s . 6 11 4 . 0 0 0 . 1 s
基于 dP C S A E的 陀螺 稳 定 平 台开 发 与测 试 系统 设 计
陈 曼 ,邹 谊 ,史 晓 东
( 中国空 空导弹研 究 院 ,洛 阳 4 1 0 ) 7 0 0
Ab ta t src :A yos opc sa iz d lto m d v o g r c i tbl e pa r i f e elpme tan e t g n d t si n s se wa n rdu e i hs p e 。whc S b s d on d V tm s it o c d nt i ap r ih i a e SPACE’ S RCP t hn lg . Ths s ser u e ec oo y i y t n s s dSP ACE DS1 0 enr o d 3 c t b ar 1 eI a | arwae pa or .whl M ATL s l h d r lt m s f i e AB/ muik an n rl Si l d Co t Des n o k a t ot r lt m . Be a s f t o v ni t a d e y r l si s f s wa e pa or f c u e o i c n e en n as ea— s t e c e g n a in o l d a d t t /d u ot r vrn- i od e ert /d wnoa n esi m o ng eb g s f wa een i o
天线双轴稳定平台伺服控制器的设计和实现

中 图分 类号 : M3 1 T 8 文献标识码 : A 文 章 编 号 :04 7 1 (0 1 0 - 05 0 1 0 - 0 8 2 1 )8 0 3 - 3
De i n a e i a i f a S r s g nd R af ton o e vo Co r le or Dua —Ax s St bi z d a f r f a n e z nt o l r f l- i a l e Pl t o m o n A t nna i
R 4 5总 线传输 , 收 端再 将 R 4 5转 为 R 2 2接 S8 接 S8 S3 收数 据 。采 用 Ma3 6 x 12芯 片 完 成 R 2 2和 R 4 5 S3 S 8 之 间的相 互转化 。
图 3 双 轴 稳 定 平 台 伺 服 控 制 系 统 硬 件 结 构
2 3驱动 电路设 计 .
—
a i s b l e l t r o hp, n h o to y tm ee t d mut l ls d lo I c n r l t o t ai b e a ・ xs t i z d p af m n s i a d t e c n rls se s lc e l p e co e - o p P D o to me h d wi v r l r a i o i h a
M I Yu —x n , I Hu , AO i n e ig L N i G Y一 g
单轴稳定平台控制系统及其电磁干扰防护
匡圃 匡亟
~ 圆圈 圈 圈囤 圈
:
图 4 系统软件 总体结构
本 系统采 用 了位置 、 速度 和 电流三 闭环控 制 , 为
:
由线性 电流传感器 A S 1 成。A S 1 C 72完 C 72的输 出 端 先经过 一 个减法 器 限压 , 后 经 过 巴特 沃 斯 低 通 然
行通讯 , 传递平台角度 、 角速度信息及控制指令。
系 统初始化 模块
2 3电机驱 动 电路设计 .
本 控 制器采用 事 件 管理 器 E B产 生六 路 S P V V.
WM波经过隔离放大形成对 电机 的驱动信号 , 通过
功 率 驱 动 芯 片 I20 S放 大 驱 动 , IF 3 1 R 13 由 R R 4 2构
反馈角度 、通 l
角加速 度进 行测 量 , 而对 测 得 的角加 速 度 进 行 一 从
次积分可以得到平 台的角速度 , 再进行第二次积分 就可以得到了平台的角位置。平台的伺服通讯信号 经 由串 口 R 42传送 。 由芯 片 S 7C T 30 C构 S2 N 4 B D 35
成 的电平 转换 电路 , D P输 出 33V转换 为 5V 将 S . 供 给 由 MA 48 E A构成 的专 用通讯 电路 , 成整 X 8E S 完
题, 在军事、 民用工业上都 有着广泛的应用…。单
轴稳 定平 台控制 器用 于 当载 体在 空间旋 转时 稳定 载 体 内 的平 台负 载 , 同时 输 出 载体 相 对平 台 的角 度及
—一信_ V 、号L -滚 哑 _ L ,转厂
号
滑 环}
角速度信号。理想的单轴稳定平台系统 , 内部平 其 台是不会跟随外部载体转动而转动的, 然而实际中, 由于支 撑轴 的摩擦 力存在 , 当外部载 体转 动时 , 支撑 轴 的摩擦力矩带动平台随着载体同方 向转动。为了 克 服不均匀 负载 以及 支撑 轴 承带 来 的摩擦 力矩 , 我
舰载搜索雷达稳定平台控制系统设计
一 一
l
控 制 器
l 系 统 组 成 和 硬 件 设 计
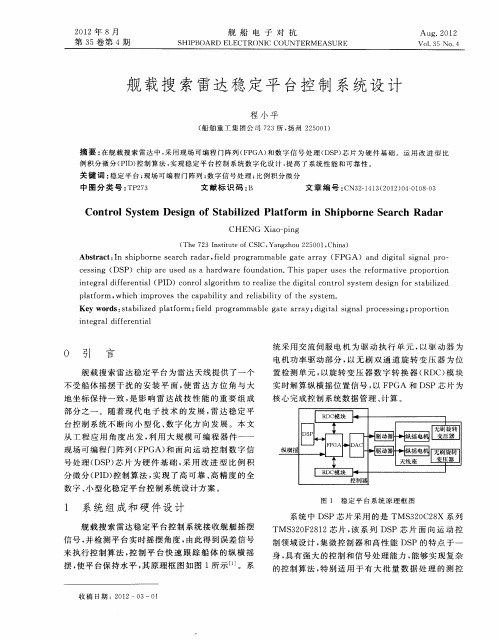
舰 载 搜索 雷达稳 定平 台控 制系统 接收舰 艇摇 摆 信号 , 并检 测平 台实 时摇摆 角度 , 由此 得到误 差信 号 来执 行控 制算法 , 制 平 台快 速 跟 踪 船体 的纵 横 摇 控 摆 , 平 台保持水 平 , 原 理框 图如 图 1所示 l 。系 使 其 1 ]
p a f r , h c m pr v s t a b lt nd r l biiy o he s t m . l to m w i h i o e he c pa iiy a ei l ft ys e a t
Ke r s s a l e a f r ; il r gr mma e ga e a r y; i ia i na r e sng; o or i y wo d : t bii d plt o m fed p o a z bl t r a d g t l sg lp oc s i pr p ton
i t g a i e e ta PI n e r l f r n il( D)c n o l o ih t e l e t e d g t l o t o y t m e i n f rs a i z d d f o r l g rt m o r a i h i ia c n r l s e d sg o t b l e a z s i
I, ̄ D P C
一
l 咽 纵 电 {变 鲞 摇 机I 匡
_ - I
天 I变隼器 I 线座
I 无刷旋转
从 工程 应 用 角度 出发 , 利用 大 规 模 可编 程器 件—— 现 场可编 程 门阵列 ( P A) 面 向运 动控 制 数字 信 F G 和 号处 理 ( S ) 片为 硬 件基 础 , DP 芯 采用 改 进 型 比例 积 分微 分 ( I ) 制算 法 , PD 控 实现 了高 可靠 、 精 度 的全 高 数字 、 型化稳 定平 台控制 系统 设计 方案 。 小 l 兰垫 l 堕 ・
三轴陀螺稳定平台控制系统设计与实现

同等精度的情况下,陀 测量时会引入附加相
结构小型化困难
好,体积尺寸较小的不同型号陀螺可供选择。
陀螺实际安装的时候,需要十分注意陀螺的安装方式,一定要保证各陀螺敏感轴与各自 框架轴线的水平,并且相互 之间保持垂直,以免造成陀螺敏感轴方向上的误差和各轴系之间的祸合效应。本系统方位和俯仰轴系的陀螺均安转在方 位内 框上,有效避免了外框尺寸过大,从而保证负载框具有较小的转动惯量。同时,每个框架都有一个独立的直流力矩 电机直接驱动,这种驱动方式省去了减速机构,有效地消除了齿轮间隙误差问题。由于其祸合刚度高,增大了系统的机
中图分类号:U “. 6 1 文献标识码:A
D s n n ra a o ocnrlyt orh e x e g ad l t n fot ss mf tr 一 i i e i i s o e e as gr s b i d l fr yo t i e Pao m al s t
Y N uL Q A GP , I i
( e c l i e f t ao,ot a U i rt N i 209, h a 砒s hn t oA o t nSu e n v s a n l06C i r a t su n mi hs t ei n g , y j n ) A s a : nv w o t e u e so i li d r csadsbin Pc 翻so h h r io bt c I i f er i n f s an i b e n t i i t a rt e h qr t m e o g s a t u t n a l go l z i f i 一 ci g P sn e Po e Cigi c ss m a r 一 is i c P f ss mc t n o t re y w s ege. a d ht l c u a e t , t e st l d lo y e ee g n e gr ads dB e oe r t d ye n h a a i a r t e x b z t m nr i h a t o i n s o t ds P csoa Vgi c hae t m cai lt c rcnt tnm icm o n se i ad n e eg r e f T u d e e r e e n c s t eo sti , a o n t e co n h i o s n n a d, h h a r u u i o u n P e sl n t sf a adh d a r i i e i dc . e i r c一o i h o o t sbidP dr w ow e t r n a w e az o r n ue T d t a es ao er f e t i r r e a nw e t lt o r dh sb u n i l nt y h a l t e am a z 1b s
一种机载稳定平台伺服控制系统的设计与实现
起 的几何 约 束 耦 合 干 扰 力 矩 只有 通 过平 台 减 震 器 和 四框 架 的结构 得 到衰 减 , 他 包 括 由平 台实 际挂 其
飞状 态时平 台气 动外 形 不 佳 引 起 的 风 阻力 矩 、 座 基
控 制信 号经 过 7 L T 2 5驱 动 后 送 给 功 率 放 大 电 4VH4
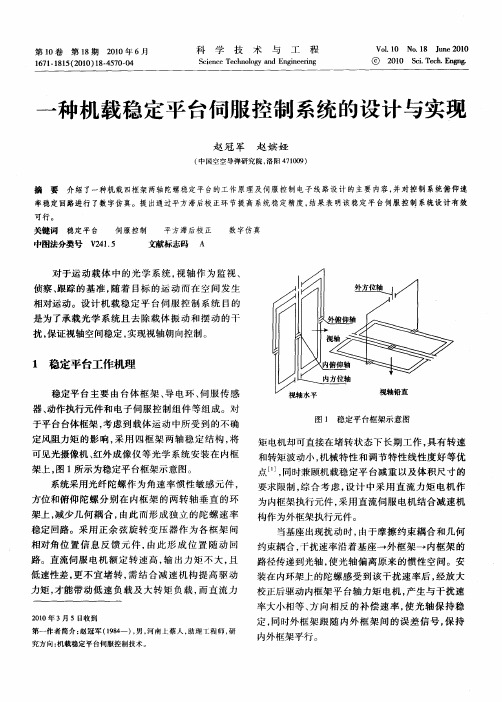
1 稳定平台工作机理
稳定 平 台 主要 由 台体 框 架 、 电环 、 服传 感 导 伺
器、 动作 执行元件 和 电子伺 服 控制 组件 等组 成 。对
于平 台台体 框架 , 考虑 到 载体 运 动 中所 受 到 的不确
定 风阻力矩 的影 响 , 用 四框 架 两 轴 稳 定 结 构 , 采 将
路径传 递 到光轴 , 光轴 偏 离原 来 的惯 性 空 间 。安 使 装在 内环架上 的陀 螺感 受 到 该 干扰 速率 后 , 经放 大 校正后 驱动 内框 架 平 台轴 力矩 电机 , 生与 干扰 速 产
率 大小相 等 、 向相 反 的补 偿 速 率 , 光 轴 保 持 稳 方 使 定, 同时外 框 架 跟 随 内外 框 架 间 的 误 差 信 号 , 持 保
第 1 O卷
第 l期 8
2 பைடு நூலகம் 6月 0 0年
科
学
技
术
与
工
程
V0. 0 No 1 J n 0 0 11 . 8 u e2 1
17 —8 5 2 1 )84 7 —4 6 1 11 (0 0 1 ・5 00
Sine ehooyadE  ̄ne n c c cnlg n n ef g e T i
稳 定 回路 。采 用 正 余 弦 旋 转变 压 器作 为各 框 架 间
磁悬浮惯性稳定平台硬件设计与实现

Science &Technology Vision科技视界磁悬浮惯性稳定平台硬件设计与实现叶涛1,2于啸男2(1.中北大学信息与通信工程学院,山西太原030051;2.北京航天控制仪器研究所,中国北京100039)【摘要】本文介绍磁悬浮惯性稳定平台的工作原理。
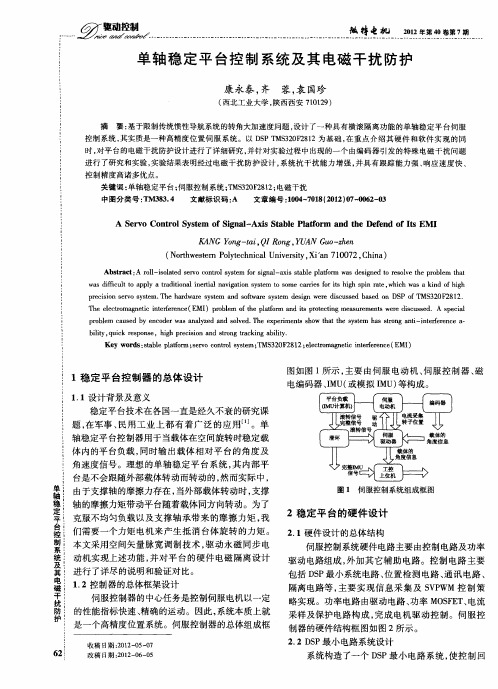
提出了惯性稳定平台的硬件电路总体设计方案,设计了以FPGA+DSP 为核心的硬件控制系统。
描述了硬件系统的组成,数字电路系统和模拟电路系统,并分别介绍各个电路系统的组成部分以及功能。
详细描述了旋转变压器的设计、控制系统设计和电机驱动设计过程。
【关键词】惯性稳定平台;硬件电路;FPGA+DSP ;控制系统;电机驱动Designed And Implementation of hardware circuit for magnetic levitation inertial stabilization platformYE Tao 1,2YU Xiao-nan 2(1.School of Information and Communication Engineering,North University of China,Taiyuan Shanxi 030051,China;2.Beijing Aerospace Control Institute,Beijing 100039,China )【Abstract 】In this paper,the working principle of magnetic levitation inertial stabilization platform is introduced.The hardware circuit design scheme of inertial stabilization platform is given,and the hardware control system based on FPGA+DSP is designed.The composition of the hardware circuit,the digital circuit system,and the components and functions of each circuit are described.The process of the rotary transformer 、the control system and the motor driver design are described in detail.【Key words 】Inertial platform;Hardware circuit;FPGA+DSP;Control system;Motor driver0引言惯性稳定平台是实现高分辨率航空对地观测的关键设备,使用惯性稳定平台能够有效的隔离载体运动对遥感载荷产生的干扰[1]。
船舶稳定平台解决方案

船舶稳定平台解决方案陀螺稳定平台(gyroscope-stabilized platform)利用陀螺仪特性保持平台台体方位稳定的装置。
简称陀螺平台、惯性平台。
用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。
它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。
稳定平台作为一种安放在运动物体上的设备,具有隔离运动物体扰动的功能。
稳定平台在航空航天、工业控制、军用及商用船舶中都有比较广泛的用途,例如航拍、舰载导弹发射台、船载卫星接收天线等。
船舶上工作面或者平台姿态检测,船载天线稳定平台系统,会应用倾角传感器定时(较长时间)读取数值,通过计算后,对稳定平台进行校正。
平台的实际运动由单片机控制外部机械装置以达到对稳定水平平台进行修正,以保证其始终处于水平状态。
某些倾角传感器作为船体液压调平系统中的反馈元件,提供高精度的倾角信号。
既可用于水下钻进也可用于水下开采等。
在国外,陀螺稳定跟踪装置被广泛应用于地基、车载、舰载、机载、弹载以及各种航天设备中。
20世纪40年代末,为了减少车体振动对行进间射击的影响,在坦克上开始安装火炮稳定器,从50年代起,双稳定器在坦克中得到了广泛的应用。
在英、美等国的先进武器系统中,基于微惯性传感器的稳定跟踪平台得到了广泛的应用,如美国的M1坦克、英国“挑战者”坦克、俄罗斯T-82坦克、英国“标枪”导弹海上发射平台和“海枭”船用红外跟踪稳定平台等,都采用了不同类型的稳定跟踪平台。
美国海军采用BEI电子公司生产的QRS-10型石英音叉陀螺,研制出WSC-6型卫星通讯系统的舰载天线稳定系统,工作12万小时尚未出现故障;Honeywell公司以红外传感器平台稳定为应用背景,研制的以GG1320环形激光陀螺为基础的惯性姿态控制装置,很好的满足了稳瞄跟踪系统的要求。
美军配装的Honeywell公司采用激光陀螺技术研制的自行榴弹炮组件式方位位置惯性系统(MAPS6000) ,在工作时可连续提供高精度的方位基准、高程、纵摇、横摇、角速率、经度和纬度输出,性能大大高于美军MAPS系统规范的要求。
平台设计_精品文档

平台设计简介平台设计是指在软件开发过程中,对软件平台的整体架构、功能和性能进行规划和设计。
一个成功的平台设计能够提供稳定、可靠、高效的基础设施,为其他软件应用程序的开发和运行提供良好的支持。
本文将介绍平台设计的重要性、设计原则以及常见的设计模式。
重要性平台设计对于软件项目的成功至关重要。
一个良好设计的平台能够提供以下几方面的优势:1.复用性:平台设计能够将常用的功能模块抽象出来,以便在不同的应用程序中进行复用,提高开发效率和代码质量。
2.可靠性:通过对平台进行细致的设计和测试,可以避免常见的 bug和错误,提高系统的稳定性。
3.可扩展性:平台设计需要考虑到未来的需求变化,通过良好的架构和设计,能够方便地添加新的功能和模块,提高系统的可扩展性。
4.性能优化:平台设计需要考虑到软件的性能需求,从设计上优化算法和数据结构,以提高系统的性能。
5.用户体验:平台设计需要从用户需求出发,提供易用、直观的界面和功能,提升用户的体验感和满意度。
设计原则平台设计应该遵循以下几个原则:1.简洁性:设计应该保持简洁,避免不必要的复杂性。
简洁的设计更易于理解、维护和扩展。
2.模块化:将复杂的功能分解为独立的模块,每个模块具有清晰的职责和接口,以提高代码的复用性和可维护性。
3.解耦合:模块之间应该尽量减少相互依赖,降低耦合性。
解耦合的设计能够提高系统的灵活性和可维护性。
4.可测试性:设计应该考虑到测试的需求,模块之间应该易于单独测试和集成测试,以保证系统的质量和稳定性。
5.可扩展性:设计应该具备良好的扩展性,能够方便地添加新的功能和模块,以适应未来的需求变化。
6.性能优化:设计应该从性能的角度出发,优化算法和数据结构,以达到高效的运行速度和低资源消耗。
设计模式设计模式是一套被反复使用的、底层的设计原则,它可以让开发者更易于理解和开发复杂的软件系统。
以下是常见的几种设计模式:1.单例模式:确保一个类只有一个实例,并提供全局访问点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术论文学校:南京理工大学队伍:7046指导老师:李军成员1:雷杨成员2:陈舒思成员3:邝平作品名称:高精度稳定平台控制系统摘要稳定平台能够隔离载体角运动,在载体机动状态下建立稳定基准面,使安装在平台上的光电设备不会因载体运动产生的抖动和滚动而丢失目标,保证光电设备准确瞄准和跟踪目标,因此广泛应用于民用和军事领域。
设计的高精度稳定平台控制系统是以动力调谐陀螺仪为速度敏感元件,旋转变压器为角度测量元件,DSP控制器TMS320F28335为主控芯片,直流力矩电机为被控对象的闭环控制系统。
根据所需关键器件的选型设计了系统的硬件电路,包括速度和角度信号采样电路、电机驱动电路、通信电路等。
采用电流环和位置环的双闭环控制方式实现系统载体静止时的伺服控制;采用电流环、速度环和位置环的三闭环控制方式实现系统在载体运动时的稳定控制。
以上两种控制模式下的角度控制精度都能够达到0.05mrad,载体运动时系统稳定控制模式下隔离扰动效果很好。
实测结果表明,该系统硬件结构简单,稳定性好,实时性强,具有良好的稳态和动态性能,能够满足稳定平台系统的性能要求。
关键词:稳定平台DSP 陀螺仪伺服控制目录1. 作品创意 (1)2. 方案设计与论证 (1)2.1 主控芯片的选择与论证 (2)2.2陀螺的选择与论证 (3)2.3 力矩电机的选择与论证 (3)2.4 位置检测元件的选择与论证 (3)3. 系统硬件与原理图设计 (4)3.1 最小系统外围电路 (4)3.2 旋转变压器-数字转换器电路 (5)3.3 滤波采样电路 (6)3.4 电机驱动电路 (7)3.5 通信电路 (8)3.6 闭锁电路 (9)3.7 电源隔离电路 (9)4. 软件设计与流程 (10)4.1 主程序框架 (10)4.2中断程序设计 (10)5. 系统测试与分析 (13)5.1 系统调试环境 (13)5.2 系统静止状态下伺服控制调试结果 (13)5.3 系统运动状态下稳定控制调试结果 (15)6.作品难点与创新 (18)6.1难点 (18)6.2创新点 (18)1. 作品创意陀螺稳定平台作为稳定视轴或瞄准线的主要手段,多年来一直是国内外科研机构的主要研究对象。
从地面上的汽车、坦克到空中的飞机、卫星等,都可以看到陀螺稳定平台的身影。
其主要作用是用来消除载体受到的干扰,使载体能够按照既定的方向运动或者在惯性空间中保持稳定。
本作品设计了双轴稳定平台控制系统。
控制系统可工作在两种不同的工作模式:载体静止时的伺服控制和载体运动时的稳定控制。
其中载体静止时系统工作于伺服控制模式,系统作用是使被稳定平台转角相对基座保持固定不变或跟随指令信号进行跟踪运动,采用旋转变压器作为角度反馈器件;载体运动时系统工作于稳定控制模式,控制系统主要功能是隔离载体运动及平台受到的各种扰动信号,保持平台相对于惯性空间稳定,以保证光电装置可以获得稳定的视场,采用陀螺仪作为平台速度反馈器件。
系统两种控制模式如图1.1、图1.2所示。
图1.1 载体静止时伺服控制框图图1.2 载体运动时稳定控制框图2. 方案设计与论证针对稳定平台的功能和用途,我们设计了系统控制方案,系统硬件结构如图2.1所示,系统分为方位轴和俯仰轴两个自由度的控制电路设计,控制系统在这两个方向上的结构基本一致,主要可以分为信号采集、电机驱动和信息交互三部分。
控制过程为:陀螺敏感到平台在惯性空间的角速度信号,经过A/D转换后变为数字信号传送给DSP主控制器,同时旋转变压器感应到的平台位置信号经过轴角粗精通道编码后,也传送到DSP中,在DSP中经过信号处理和控制算法处理后,产生控制力矩电机的信号,以抵消扰动力矩使平台稳定并跟踪目标。
图2.1 方案整体设计图2.1 主控芯片的选择与论证TMS320F28335型数字信号处理器TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM),12位16通道ADC。
得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSC相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
与作用相当的32位定点技术相比,快速傅立叶转换(FFT)等复杂计算算法采用新技术后性能提升了一倍之多。
这些特点使得TMS320F28335非常适合于本设计伺服控制系统使用。
2.2陀螺的选择与论证本系统所采用的陀螺仪为动力调谐陀螺仪,与常用的输出位置信号的液浮陀螺不同,该陀螺输出的是速率信号,经过调研该型陀螺是目前国内同等体积下精度较高的一款陀螺仪。
动力调谐陀螺仪是一种双自由度陀螺仪,它利用可以准确补偿摩擦力矩的挠性支承悬挂陀螺转子,消除了摩擦干扰力矩,结构简单,性能可靠。
外环的转子通过外扭杆与内环的平衡环相连,平衡环通过内扭杆与力矩电机轴相连,转子可以绕内外轴线转动,是目前比较常用的一款陀螺仪2.3 力矩电机的选择与论证执行元件影响着被控对象的运动状况与系统精度。
通常选用电机作为稳定平台伺服控制系统的执行元件。
目前使用的电机有:直流伺服电动机、交流伺服电动机、步进电机以及直流力矩电机等。
根据平台稳定系统低转速、大转矩的工作要求,选用直流力矩电机作为稳定平台伺服系统的执行元件。
其主要特点是可以长期在堵转状态下运行,和负载直接相连无需加装减速齿轮,避免了空回"除此之外,力矩电机还具有反映快、精度高!藕合刚度大、低转速、线性度好,体积小等优点。
2.4 位置检测元件的选择与论证平台的环架位置就是各个环的力矩电机所转动的角度,比较常用的获取电机转角的装置主要有光电编码器和旋转变压器等。
在工业生产中光电编码器的精度可以做到很高,测量范围广,且很多数字控制器都有专用外设结构与其相匹配,所以其使用更为广泛。
但在此处力矩电机的转动角度比较小,转速快慢变化范围较大,并且由于系统使用环境存在大冲击等恶劣因素,电机角度采样装置除了需要能精确地反映电机真实的转角外,还需要有较强的抗冲击和抗误差能力。
旋转变压器是在测角系统中广泛采用的一种高精度角度传感器,精度高、动态性能好、抗干扰能力强,尤其适用于高温、严寒、潮湿、高速、振动等环境恶劣、旋转编码器无法正常工作的场合。
它利用电磁感应原理将直线位移或转动角度精确地转换成电信号,按极对数可以分为单对极和多对极型。
由于粗机(单对极旋转变压器)测量范围大但精度低,精机(多对极旋转变压器)测量范围小但精度高,在测量电机角度时一般都采用精机和粗机相组合的方式获取准确角度。
3. 系统硬件与原理图设计3.1 最小系统外围电路JTAG接头是DSP与仿真器的接口,通过该接口可以很方便的对DSP进行仿针和调试,图3.1所示为无缓冲器的简易接法。
需要注意的是当JTAG接口与DSP的距离大于15cm时应当考虑增加信号缓冲器。
图3.1 JTAG接口TMS320F228335的最高主频为150MHZ,为了正常工作需要为其提供时钟输入信号。
有两种时钟提供方式,一种是直接使用外部振荡器提供,另一种是使用DSP内部振荡器但需要外接石英晶振如图3.2所示。
从易实现性和成本上考虑使用后种方式来为DSP提供时钟输入。
图3.2 石英晶振电路电源和复位电路如图 3.3所示。
一路输出稳定 3.3V电压,另一路选择R=18.2K,由式3.1可以得到输出电压为1.9V。
两路电压通过TPS3305-18来监1测电压稳定情况,在按下手动复位按键和电源电压不稳时复位DSP。
图3.3 电源和复位电路3.2 旋转变压器-数字转换器电路图3.4中S1,S2,S3,S4为旋转变压器输出信号,CDD0~CSD11为对应的数字输出量。
为了将所有输出位一次性送出,需要将BYSEL信号至高或者悬空,INH信号为模块的片选信号,当需要读取输出数据时需要将其置低,EN为数据输出使能信号可以接控制器的RD,BUSY信号为模块转换完成标志,当转换完成时输出一个高脉冲。
图3.4 旋转变压器-数字转换电路其供电电源电路如图3.5所示,电源转换模块输入为26V直流电,输出26V、400HZ交流电源。
图3.5 26V交流电源3.3 滤波采样电路如前所述,陀螺速率信号、操纵瞄准信号和漂移补偿信号等需要进行滤波采样,几种信号的采样电路结构相似,以陀螺速率信号采样电路为例,如图3.6所示,信号经过前置差分放大电路进行减噪处理后,通过RC低通滤波器滤除速度信号中的高频噪声干扰,再经过电压跟随器进行前后级的隔离,最后通过模数转换转换为对应数字量。
图3.6 陀螺速率信号采样电路系统需要采集的模拟量比较多,对应需要读取的信号线就多,但DSP的数据线和板卡面积有限,而且对数字控制系统来说,对信号量的读取是分时进行的。
因此从各方面考虑没有必要为每个读取的模拟量单独配置一个模数转换芯片,这就要求必须使用缓冲器件对信号进行锁存以便分时进行读取。
以陀螺速率信号的漂移补偿和零偏补偿电路为例,就使用了多路开关来分时选通补偿量进行补偿。
如图3.7所示,该多路开关最多可以选通8路模拟信号,实际中只使用了4路。
图3.7 多路开关对于并行数据,使用54HC541为锁存缓冲器电路,如图3.8所示。
由于锁存输出信号为5V电平标准,需要54ALVC16245进行电平转换,如图3.9所示。
图3.8 锁存缓冲器电路图3.9 电平转换电路3.4 电机驱动电路如图3.10所示,DSP输出的两路PWM驱动信号经过光耦HCPL2601隔离后送至集成驱动器MC33486用以驱动电机,MC33486的控制信号以及反馈信号也通过光耦进行隔离。
由7805构成的电压转换电路给光耦位于电机侧信号提供单独的+5V电源。
图3.10 电机驱动电路CAN通信和SCI串行通信电路如图3.11所示,本系统使用的CAN通信速率达到了1Mb/s,SCI串行通信采用了115200bit/s的波特率,经过实际调试,两路通信正常稳定,板卡间信息交互良好。
图3.11 CAN和SCI串行通信电路对于CAN通信与MRC总线通信转接电路,由于使用的RAM只有4K,实际只使用了1K,而DSP28335外设总线接口的ZONE0区,可以访问8K的地址空间,所以其访问范围是足够的。
在此使用28335的ZONE0区访问信号线作为该双向RAM DSP侧片选,另一侧接MRC总线控制器,其电路图如图3.12所示,设置RAM为字访问模式。