FANUC SERVO AMPLIFIER βi series IO Link 维修说明书 B-65395CM_01
发那科机器人焊接应用IO配置(总线型)
发那科机器人焊接应用的I/O配置(总线型)<H2><A NAME="1">Version Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><br>F Number: YH14979VERSION : SpotTool+$VERSION: V7.5093 06/14/2010DATE: 14-AUG-11 18:21VERSION INFORMATION::SOFTWARE: ID:SpotTool+ 7DA5/12S/W Serial No. : 88150Controller ID : YH14979Default Personality (from FD)R-2000iB/210F V7.50P/12Servo Code : V15.01Cart. Mot. Parameter: V3.00JNT. Mot. Parameter : V3.00DCS : NoneSoftware Edition No.: V7.50P/12Update Version : NoneCustomization Ver. : NoneRoot Version : V7.5093Boot MONITOR : V7.70P/06Teach Pendant : 7D0F/01MBrowser Plugins : V7.7004TP Core Firmware : V7.7004Media from FRL 06/24/2010CONFIG::FEATURE: ORD NO:SpotTool+ H590English Dictionary H521Multi Language (CHIN) H539AA Vision Mastering AAVMAnalog I/O H550Auto Software Update ATUPAutomatic Backup J545Background Editing J616Camera I/F VCAMCell I/O CLIOCommon shell R645Common shell core CMSC Common so CMSP Common style select STYL Condition Monitor J628 Constant Path R663 Control Reliable CNRE Corner Region R654 Diagnostic log RSCH Disable Faults CDSB Dispense Plug-in SPLG Dual Check Safety UIF DCSU Enhanced Mirror Image R698 Enhanced Rob Serv Req ORSR Enhanced T1 Mode R680 Enhanced User Frame J604 Ext. DIO Config EIOC Extended Error Log R542 External DI BWD ESET FCTN Menu Save J516J716Group Mask Exchange MASK High-Speed Skip J627 Host Communications HOCO Hour Meter J513 I/O Interconnect 2 J542Incr Instruction J510 KAREL Cmd. Language J650 KAREL Run-Time Env J539 Kernel + Basic S/W H510 License Checker LCHK LogBook(System) OPLG MACROs, Skip/Offset J503 MH gripper common MHGC Mat.Handling Option MPLG MechStop Protection MCSP Mirror Shift J506 Mixed logic J554 Mode Switch MDSW Motion logger R637 Multi Appl Enabler MAEN Multi Equipment J617 Multi-Tasking J600 Position Registers J514 Print Function J507Prog Num Selection J515 Program Adjust J517 Program Shift J505 Program Status PRST Program ToolBox R598 RDM Robot Discovery FRDM Robot Service Request SRSR Robot Servo Code H930 SNPX basic SNBA Seal Common SLCM Shift Library SHLB Shift and Mirror Lib SMLB Soft Parts in VCCM SPVC Spot Plug-in SPPG TCP Auto Set J520 TCP Speed Prediction J524 TCP/IP Interface HTCP TMILIB Interface TMIL TP Menu Accounting TPAC TPTX TPTX Telnet Interface TELN Tool Offset J509 Unexcepted motn Check UECK User Frame UFRM Vision Core VCOR Vision Library VIPL Vision SP CSXC CSXC Vision Shift Tool CVVF Web Server HTTP Web Svr Enhancements R626 iPendant CGTP iPendant Grid Display IGUI iPendant Setup IPGSR-2000iB/210F H601 Servo Gun Axes H869 Auto Tuning CS J952 Collision Guard R534 Collision Guard Pack J684 Cycle Time Priority J523 DeviceNet Interface J753 DeviceNet(Slave) J754 Disp 2nd analog port R528 Extended Axis Control J518 Extended User Frames R696FANUC ServoGun Change J665 FRL Params R651 HMI Device (SNPX) R553 Multi-Group Motion J601 PC Interface R641 PMC(FAPT Ladder) J760 Password Protection J541 ROS Ethernet Packets R603 Servo Gun Option J643 Servo Gun WT Compens J933 Space Check J609 USB port on iPendant J957 YELLOW BOX J775 iRCalibration VShift J994Arc Advisor R666 Aux Servo Code SVMO Common calib UIF CUIF Cycle time Opt. CTOP Extended Axis Speed EXTS Func stup FCSP HTTP Proxy Svr PRXY High Speed ServoGun J886 IntelligentTP PC I/F J770JPN ARCPSU PRM J885 Motherboard driver MOBO PC Send Macros SEND Pressure Control PCTL Requires CP CPRQ Robot Library Setup RLCM SSPC error text ETSS Servo Gun Core J670 Servo Hand Change SVHC Sgdiag core SGDG Socket Messaging R636 Soft Limit SLMT TCPP Extention TCPE VCalibration Common VCCM VisShift I/F Common CVVC Vision Shift Common CVVS istdpnl IPNL iPendant HMI Setup U001 RM HELP INCL VIS PKGS U004 SMB TP Backup U006 RIPE GET_VAR FIX U007FLEXTOOL: ADD R729.FD U008 CVIS ADD EP ADV PKG U009 CVIS NO WTWTEST LOAD U010 LOAD HELP FOR SELECT U011 FALSE ALARM CPMO-130 U012 MD: HANG FROM INTP U013 R709 DRAM AVAILCHECKS U014 CVIS VPCS SUPP LIMCHK U015 CVIS VPFF POS DIF FIX U0168-12 CHARACTER PROGRA U017 SAVE FRAMEVAR.SV U018 TP Enable NOAM U026 STRCTURE SHADOW UPDAT U027 RIPE STATICS TOO MUCH U028 TIMQ MOTN-003 U030 ROBOGUIDE DAUGHTER U032 Disable touch in Edit U033 PATH NODE MOVETO U035 RIPEREMOVE TIME RETRY U038 VMXPACK MAY ASSERT U039 CYCLE DATA MAY BE COR U040 TOO MANY ARC OPTIONS U043 PMC Display wait fix U044 APSH-171 fix U045 SLOW T1 MOTN U046 GET_POS_TPE fix U047 jog disable by app wa U048 CVIS VPEP HIST RT FIX U049 MXSPD TB CPMO003 U050 CVIS BARCODE ENHANCE U051 prv save may not work U052 High RIPE traffic fix U053print from sysvar scr U054 PROGRAM ADJUST FOR SH U058 RIPE/GETSET ERROR HAN U060 IPENDANT SCREEN UNREA U061 HANDLE PART CORRECTIO U064 NO ED U066CVIS EP PKG INCL SVIP U067SIX DIGIT VERSIONS U068 CVIS NEW VERSION P06 U069 IMAGE SAVE LOAD U070 DISP PROC ISSUE U071 REPLAN JOINT DELTA U078TP EDIT CALLFROM FIX U079 CVIS FIX IPNDT RT IMG U080 $coord_mask default U084R719 ENHANCEMNT/FIXES U085 Local Hold TIMQ Adjus U097 PG: CHDELMON can caus U100 CVIS: 3D multi-view d U101 Increase Number of FD U103 KAREL CANNOT ACCESS M U104 Robot Settings are lo U108 PAINT - Wait/Release U109 FlexTool: Backward mo U114 PAINT - PaintPRO Repa U117 EDIT SCREEN IS CLOSED U500 ANTIDEFECT UIF FIX U507 PNIO V750 FIX1 U509 FIX LOADING DB SYSVAR U510 FIX EDGE DETECTION U511 ONLINE HELP BUGFIX U512 CVIS: CAM CALIB FIX U514 DISP CUSTOM FOR SSGUN U515 FIX ABC JARKY MOTION U517 MILLIMETER CONVERSION U518 GARBLED STR REG U519 ALARM TEXT BUG FIX U520 DISP CUST DRY FOR SSG U521 IMPROVE LWR DETECTION U523 CVIS FREEZE VLOG TASK U525VP2S MM CONVERSION U526 FIX TP FREEZE IBPX U527FX DB/TB BUSY RUNNING U528 RECORD CALIBRATION LO U529 DIV CALCULATION FIX U530 FIX FOR BWD RETURN U531 CONDITION MONITOR FIX U532 VOFS: UNEXP ALARM FIX U533 FIX SERVO GUN TEXT U534 FIX FENCE SVEMG ABNML U535 DCS CC_SAFEIO ALARM U537 IMPROVED GUN TOUCHUP U540 FIX GUN CHG WITH DNET U541 UPDATE GUNTCH PAEAMS U542 DOT PETTERN BUG U543 CVIS: IRVISION BUG FI U544UPDATE SVGN ERROR TXT U545FIX TOOLCHG WITH DNET U546MLOCK CHK WITH GUNCHG U547MECH COMP FOR GUNTCH U549IMPROVE GUNTCH PARAMS U550VISION MEMORY LEAK U551FIX UNWANTED MESSAGE U552SUPPORT DET SOFT WORK U553CVIS:SPEC CHANGE OF V U554GRID DETECT BUG FIX U559MOTOR::GR: AX: MOTOR ID AND INFO:1 1 ACaiSR30/3000 80A H1 DSP1-L1 2 ACaiSR30/3000 80A H2 DSP1-M1 3 ACaiSR30/3000 80A H3 DSP1-J1 4 ACa12/4000iS 40A H4 DSP1-K1 5 ACa12/4000iS 40A H5 DSP2-L1 6 ACa12/4000iS 40A H6 DSP2-M1 7 aiF22/3000 80A H DSP -2 1 aiS8/4000 80A H DSP -SERVO::GROUP: AXIS: SERVO PARAM ID:1 1 P02.061 2 P02.061 3 P02.061 4 P02.061 5 P02.061 6 P02.061 7 P00.392 1 P00.39</PRE><H2><A NAME="2">Memory Detail</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>MEMORY USAGE::MEMORY DETAIL (MAIN):Pools TOTAL AVAILABLE LARGEST TPP 800.0KB 577.8KB 555.0KB PERM 1978.0KB 371.6KB 366.5KB SYSTEM 7182.0KB 2.5KB 2.5KBSHADOW 5894.5KB 5556.5KB 32.0KBTEMP 21052.5KB 1422.8KB 714.2KBFROM 31857.0KB 9258.0KB .0KBHARDWAREFROM 32MBDRAM 32MBSRAM 2MBMEMORY DETAIL (COMM):Pools TOTAL AVAILABLE LARGESTTPP 0.0KB 0.0KB 0.0KBPERM 48.0KB 47.8KB 47.8KBSYSTEM 6144.0KB 5553.0KB 5553.0KBSHADOW 5894.5KB 5556.5KB 32.0KBTEMP 9844.5KB 8201.3KB 7949.9KB</PRE><H2><A NAME="3">Program Status Information</A></H2><PRE><A HREF="#TOP">【TOP】</A><P>TASK STATES:1 RESET status = ABORTED****** History Data ******Routine depth: 0 Routine: RESETLine: 1 Program: RESET Type: TP 2 STHICHNG status = ABORTED****** History Data ******Routine depth: 0 Routine: STHICHNGLine: 128 Program: STHICHNG Type: PC 3 PNLINST status = ABORTED****** History Data ******Routine depth: 0 Routine: PNLINSTLine: 223 Program: PNLINST Type: PC 4 PSCOLD status = ABORTED****** History Data ******Routine depth: 0 Routine: PSCOLDLine: 93 Program: PSCOLD Type: PC5 SYRSRUTL status = ABORTED****** History Data ******Routine depth: 0 Routine: SYRSRUTLLine: 63 Program: SYRSRUTL Type: PC 6 SVGNCH status = ABORTED****** History Data ******Routine depth: 0 Routine: SVGNCHLine: 287 Program: SVGNCH Type: PC 7 SGDIAINI status = ABORTED****** History Data ******Routine depth: 0 Routine: SGDIAINILine: 204 Program: SGDIAINI Type: PC8 ATSHELL RUNNING @ 1055 in ATSHELL of ATSHELL****** History Data ******Routine depth: 0 Routine: ATSHELLLine: 1055 Program: ATSHELL Type: PC 9 LOADCELL status = ABORTED****** History Data ******Routine depth: 0 Routine: PBCORELine: 0 Program: PBCORE Type: 0 10 MHGRSHLL RUNNING @ 1213 in MHGRSHLL of MHGRSHLL****** History Data ******Routine depth: 0 Routine: MHGRSHLLLine: 1213 Program: MHGRSHLL Type: PC 11 SWAXTSK1 RUNNING @ 758 in PROCESSAMR of SWAXTCMN****** History Data ******Routine depth: 1 Routine: PROCESSAMRLine: 758 Program: SWAXTCMN Type: PC Routine depth: 0 Routine: SWAXTSK1Line: 172 Program: SWAXTSK1 Type: PC12 SWAXTSK2 RUNNING @ 758 in PROCESSAMR of SWAXTCMN****** History Data ******Routine depth: 1 Routine: PROCESSAMRLine: 758 Program: SWAXTCMN Type: PCRoutine depth: 0 Routine: SWAXTSK2Line: 120 Program: SWAXTSK2 Type: PC 13 SLCUSTOM RUNNING @ 1647 in SLCUSTOM of SLCUSTOM****** History Data ******Routine depth: 0 Routine: SLCUSTOMLine: 1647 Program: SLCUSTOM Type: PC 14 SWIMSET status = ABORTED****** History Data ******Routine depth: 0 Routine: SWIMSETLine: 348 Program: SWIMSET Type: PC</PRE><H2><A NAME="4">I/O status information</A></H2><PRE><A HREF="#TOP"></A><P>IO STATUS::DIN【1】OFFDIN【2】OFFDIN【3】OFFDIN【4】OFFDIN【5】OFF UPPER TIP RESETDIN【6】OFF LOWER TIP RESETDIN【7】OFF TEST RUNDIN【8】OFF TIP CHANGE COMPLETEDIN【9】OFFDIN【10】OFFDIN【11】OFF DRESS_1 COMPLETEDIN【12】OFF DRESS_2 COMPLETEDIN【13】OFF DRESS_1 ADV.LSDIN【14】OFF DRESS_2 ADV.LSDIN【15】OFF DRESS_1 RET.LSDIN【16】OFF DRESS_2 RET.LSDIN【17】OFFDIN【18】OFFDIN【19】OFF TC1 5STEP 1DIN【20】OFF TC1 5STEP 2DIN【21】OFF TC1 5STEP 3DIN【22】OFF TC1 5STEP 4DIN【23】OFF TC2 5STEP 1DIN【24】OFF TC2 5STEP 2DIN【25】OFF TC2 5STEP 3DIN【26】OFF TC2 5STEP 4DIN【27】OFF POP WELD COMPLETE DIN【28】OFFDIN【29】OFFDIN【30】OFFDIN【31】OFF GUN COVER OPENDIN【32】ON GUN COVER CLOSE LS DIN【33】OFF HAND COVER OPEN DIN【34】ON HAND COVER CLOSE DIN【35】OFF AHC COVER-3 OPEN LS DIN【36】OFF AHC COVER-3 CLOSE LS DIN【37】OFF AHC COVER-4 OPEN LS DIN【38】OFF AHC COVER-4 CLOSE LS DIN【39】OFF GUN1 2ND ST OPEN LS DIN【40】OFF GUN2 2ND ST OPEN LS DIN【41】OFF CHUCK OPEN CONFIRM DIN【42】ON CHUCK CLOSE CONFIRM DIN【43】ON AHC FACEDIN【44】OFFDIN【45】OFFDIN【46】OFFDIN【47】OFF ROBOT 2ND STARTDIN【48】OFFDIN【49】OFF WELD COMPLETEDIN【50】OFFDIN【51】OFFDIN【52】OFFDIN【53】OFFDIN【54】OFFDIN【55】ON STYLE1DIN【56】OFF STYLE2DIN【57】OFF STYLE4DIN【58】OFF STYLE8DIN【59】OFF STYLE16DIN【60】OFF STYLE32DIN【61】OFF STYLE64DIN【62】OFF STYLE128DIN【63】OFF GUN1 STEADDIN【64】OFF HAND STEADDIN【65】OFF TOOL STEAD 3DIN【66】OFF TOOL STEAD 4DIN【67】OFFDIN【68】OFFDIN【69】OFFDIN【70】OFFDIN【71】OFF Jig Non-int.DIN【72】OFF Shuttle Nnn-int.DIN【73】OFFDIN【74】OFF Weld Enable 1DIN【75】OFF Weld Enable 2DIN【76】ON Robot_G Weld Comp.1 DIN【77】OFFDIN【78】OFFDIN【79】ON Pick Up Ok Feeder DIN【80】OFFDIN【81】OFF Hand Jig Conf.DIN【82】OFF Hand Rock Adv Comp DIN【83】OFF Jig Cover Close Comp. DIN【84】OFF Hand Rock Ret Comp. DIN【85】OFF Jig Cover Open Comp. DIN【86】ON Robct_G I/L1DIN【87】ON Robot_G I/L2DIN【88】OFFDIN【89】OFFDIN【90】OFFDIN【91】OFFDIN【92】OFFDIN【93】OFFDIN【94】OFF Sealer HoldDIN【95】OFFDIN【96】OFFDIN【97】OFFDIN【98】OFFDIN【99】OFFDIN【100】OFFDIN【101】OFFDIN【102】OFFDIN【103】OFFDIN【104】OFFDIN【105】OFFDIN【106】OFF PART IN STATION CONFIRM DIN【107】ON ROBOT AWAY FROM STATION DIN【108】OFFDIN【109】ON GUN IN STATIONDIN【110】OFF HANDKING IN STATIONDIN【113】ON SEALING MATERIAL OKDIN【114】OFF SEALING MATERIAL LACKING DIN【115】OFFDIN【116】OFF HEATING NOT OKDIN【117】OFFDIN【118】OFFDIN【119】OFFDIN【120】OFFDIN【121】OFFDIN【122】OFFDIN【123】OFFDIN【124】OFFDIN【125】OFFDIN【126】OFFDIN【127】OFFDIN【128】OFFDIN【129】OFF Clamp 1 openDIN【130】ON Clamp 1 closedDIN【131】OFF Clamp 2 openDIN【132】ON Clamp 2 closedDIN【133】OFF Clamp 3 openDIN【134】ON Clamp 3 closedDIN【135】OFF Clamp 4 openDIN【136】ON Clamp 4 closedDIN【137】OFF Clamp 5 openDIN【138】ON Clamp 5 closedDIN【139】OFF Clamp 6 openDIN【140】ON Clamp 6 closedDIN【141】OFF _DIN【142】OFF _DIN【143】OFF _DIN【144】OFF _DIN【145】OFF Part present 1DIN【146】OFF Part present 2DIN【147】OFFDIN【148】OFFDIN【149】OFF 2-1-ONDIN【150】ON 2-1-OFFDIN【151】OFF 2-2-ONDIN【152】ON 2-2-OFFDIN【153】ON 2-3-OFFDIN【154】ON 2-4-OFFDIN【155】OFFDIN【156】OFFDIN【157】ON 3-1-OFFDIN【158】OFF 3-1-ONDIN【159】ON 3-2-OFFDIN【160】OFF 3-2-ONDOUT【1】OFF ROBOT USER ALARM DOUT【2】OFF STYLE VAERITY FAULT DOUT【3】OFFDOUT【4】OFFDOUT【5】OFF GUN COVER OPENDOUT【6】OFF GUN COVER CLOSEDOUT【7】OFF HAND COVER OPEN DOUT【8】OFF HAND COVER CLOSE DOUT【9】OFF AHC COVER-3 OPEN DOUT【10】OFF AHC COVER-3 CLOSE DOUT【11】OFF AHC COVER-4 OPEN DOUT【12】OFF AHC COVER-4 CLOSE DOUT【13】OFFDOUT【14】OFF TIP WEAR OVER MOVE DOUT【15】OFF TIP WEAR OVER FIXDOUT【16】OFF TIP CHANGE POSITION DOUT【17】OFF TC1 GUN FAULT CHECK DOUT【18】OFF TC1 OFF_SET MEASURING DOUT【19】OFFDOUT【20】OFFDOUT【21】OFFDOUT【22】OFFDOUT【23】OFFDOUT【24】OFFDOUT【25】OFFDOUT【26】OFFDOUT【27】OFFDOUT【28】OFFDOUT【29】OFF DRESSOR-1 STARTDOUT【30】OFF DRESSOR-2 STARTDOUT【31】OFF DRESSOR SHIFT1 ADV.SERVO DOUT【32】OFF DRESSOR SHIFT2 ADV.SERVO DOUT【33】OFF POP START1DOUT【34】OFF POP START2DOUT【35】OFF POP START3DOUT【36】OFF POP START4DOUT【37】OFF POP WELD CONDITION 1 DOUT【38】OFF POP WELD CONDITION 2 DOUT【39】OFF POP WELD CONDITION 4 DOUT【40】OFF POP WELD CONDITION 8 DOUT【41】OFF POP WELD CONDITION 16 DOUT【42】OFF POP WELD CONDITION 32 DOUT【43】OFF POP SWING ADV.DOUT【44】OFFDOUT【45】OFF WORK COMPLETE DOUT【46】ON Shuttle Run Enable DOUT【47】OFF 2nd Work Comp.DOUT【48】OFF GUN1 PRESSDOUT【49】OFFDOUT【50】OFFDOUT【51】OFF UNCHUCK POSITION DOUT【52】OFF AHC FaceDOUT【53】OFF CHUCK OPENDOUT【54】ON CHUCK CLOSEDOUT【55】OFF Sealer FaultDOUT【56】OFF Sealer EM.StopDOUT【57】OFF Sealer LowDOUT【58】OFF SEAL AIR PRESSDOUT【59】OFFDOUT【60】OFFDOUT【61】OFF WELD CONDITION 1 DOUT【62】OFF WELD CONDITION 2 DOUT【63】OFF WELD CONDITION 4 DOUT【64】OFF WELD CONDITION 8 DOUT【65】OFF WELD CONDITION16 DOUT【66】OFF WELD CONDITION32 DOUT【67】OFF WELD CONDITION64 DOUT【68】OFF WELD CONDITION128 DOUT【69】ON Jig Non-int.DOUT【70】ON Shuttle Non-int.DOUT【71】OFF Tip Change Run.DOUT【72】OFF Tip Dress Run.DOUT【73】OFFDOUT【74】OFFDOUT【75】OFFDOUT【76】OFFDOUT【77】ON Fdr. Non-int.DOUT【78】OFF Fdr. unload comp.DOUT【79】OFFDOUT【80】OFF Jig Hand ClampDOUT【81】OFF Jig Cover CloseDOUT【82】OFF Jig Hand UnclampDOUT【83】OFF Jig Cover OpenDOUT【84】ON Robot_G I/L1DOUT【85】ON Robot_G I/L2DOUT【86】OFFDOUT【87】OFFDOUT【88】OFFDOUT【89】OFFDOUT【90】OFF SEALING MATERIAL LACKING DOUT【91】OFF SEALING HEATING NOT OK DOUT【92】OFF SEALING GUN OPEN DOUT【93】OFFDOUT【94】OFF CC-LINK STATUSDOUT【95】OFF CC-LINK STATUSDOUT【96】OFF CC-LINK STATUSDOUT【97】OFF CC-LINK STATUSDOUT【98】OFF CC-LINK STATUSDOUT【99】OFF CC-LINK STATUSDOUT【100】OFF CC-LINK STATUSDOUT【101】OFF CC-LINK STATUSDOUT【102】OFFDOUT【103】OFFDOUT【104】OFF JIG CLAMP OPEN REQUEST DOUT【105】OFFDOUT【106】OFF PART IN STATIONDOUT【107】OFFDOUT【108】OFFDOUT【113】OFF SEALING STARTDOUT【114】ON SEALING STOPDOUT【115】OFFDOUT【116】OFFDOUT【117】OFFDOUT【118】OFFDOUT【119】OFFDOUT【120】OFFDOUT【121】OFFDOUT【122】OFFDOUT【123】OFFDOUT【124】OFFDOUT【125】OFFDOUT【127】OFFDOUT【128】OFFDOUT【129】OFF SPAREDOUT【130】OFF SPAREDOUT【131】OFF CLAMP_3_ON DOUT【132】ON CLAMP_3_OFF DOUT【133】OFF CLAMP_2_ON DOUT【134】ON CLAMP_2_OFF DOUT【135】OFF CLAMP_1_ON DOUT【136】ON CLAMP_1_OFF DOUT【137】OFF SPAREDOUT【138】OFF SPAREDOUT【139】OFF _DOUT【140】OFF _DOUT【141】OFF _DOUT【142】OFF _DOUT【143】OFF _DOUT【144】OFF _GIN【1】 1 Style No.GOUT【1】0UI【1】ON *IMSTPUI【2】ON *HoldUI【3】ON *SFSPDUI【4】OFF Cycle stopUI【5】OFF Fault resetUI【6】OFF StartUI【7】OFF HomeUI【8】ON EnableUI【9】OFF RSR1/PNS1UI【10】OFF RSR2/PNS2UI【11】OFF RSR3/PNS3UI【12】OFF RSR4/PNS4UI【13】OFF RSR5/PNS5UI【14】OFF RSR6/PNS6UI【15】OFF RSR7/PNS7UI【16】OFF RSR8/PNS8UI【17】OFF PNS strobeUI【18】OFF Prod startUO【1】ON Cmd enabled UO【2】ON System ready UO【3】OFF Prg runningUO【4】OFF Prg pausedUO【5】OFF Motion heldUO【7】ON At perchUO【8】OFF TP enabledUO【9】OFF Batt alarmUO【10】OFF BusyUO【11】OFF ACK1/SNO1UO【12】OFF ACK2/SNO2UO【13】OFF ACK3/SNO3UO【14】OFF ACK4/SNO4UO【15】OFF ACK5/SNO5UO【16】OFF ACK6/SNO6UO【17】OFF ACK7/SNO7UO【18】OFF ACK8/SNO8UO【19】OFF SNACKUO【20】OFF ReservedSI【1】OFF Fault resetSI【2】ON RemoteSI【3】ON HoldSI【4】OFF User PB#1SI【5】OFF User PB#2SI【6】OFF Cycle startSI【7】OFFSI【8】ON CE/CRselectb0 SI【9】ON CE/CRselectb1 SI【10】OFFSI【11】OFFSI【12】OFFSI【13】OFFSI【14】OFFSI【15】OFFSI【16】ONSO【1】OFF Cycle startSO【2】OFF HoldSO【3】OFF Fault LEDSO【4】OFF Batt alarmSO【5】OFF User LED#1SO【6】ON User LED#2SO【7】OFF TP enabledSO【8】OFFSO【9】OFFSO【10】OFFSO【11】OFFSO【12】OFFSO【13】OFFSO【15】OFFSO【16】ONUI【1】ON *IMSTPUI【2】ON *HoldUI【3】ON *SFSPDUI【4】OFF Cycle stopUI【5】OFF Fault resetUI【6】OFF StartUI【7】OFF HomeUI【8】ON EnableUI【9】OFF RSR1/PNS1UI【10】OFF RSR2/PNS2UI【11】OFF RSR3/PNS3UI【12】OFF RSR4/PNS4UI【13】OFF RSR5/PNS5UI【14】OFF RSR6/PNS6UI【15】OFF RSR7/PNS7UI【16】OFF RSR8/PNS8UI【17】OFF PNS strobeUI【18】OFF Prod startUO【1】ON Cmd enabled UO【2】ON System ready UO【3】OFF Prg running UO【4】OFF Prg paused UO【5】OFF Motion held UO【6】OFF FaultUO【7】ON At perchUO【8】OFF TP enabled UO【9】OFF Batt alarm UO【10】OFF BusyUO【11】OFF ACK1/SNO1 UO【12】OFF ACK2/SNO2 UO【13】OFF ACK3/SNO3 UO【14】OFF ACK4/SNO4 UO【15】OFF ACK5/SNO5 UO【16】OFF ACK6/SNO6 UO【17】OFF ACK7/SNO7 UO【18】OFF ACK8/SNO8 UO【19】OFF SNACKUO【20】OFF ReservedRI【1】OFFRI【2】OFFRI【3】OFFRI【5】OFFRI【6】OFFRI【7】OFFRI【8】OFFRO【1】OFFRO【2】OFFRO【3】OFFRO【4】OFFRO【5】OFFRO【6】OFFRO【7】OFFRO【8】OFF</PRE><H2><A NAME="5">I/O Configuration Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>IO CONFIGURATION::DIN【5】UPPER TIP RESETDIN【6】LOWER TIP RESETDIN【7】TEST RUNDIN【8】TIP CHANGE COMPLETEDIN 1 - 8 RACK: 81 SLOT: 15 PORT: 19DIN【11】DRESS_1 COMPLETEDIN【12】DRESS_2 COMPLETEDIN【13】DRESS_1 ADV.LSDIN【14】DRESS_2 ADV.LSDIN【15】DRESS_1 RET.LSDIN【16】DRESS_2 RET.LSDIN 9 - 16 RACK: 81 SLOT: 15 PORT: 27DIN【19】TC1 5STEP 1DIN【20】TC1 5STEP 2DIN【21】TC1 5STEP 3DIN【22】TC1 5STEP 4DIN【23】TC2 5STEP 1DIN【24】TC2 5STEP 2DIN 17 - 24 RACK: 81 SLOT: 15 PORT: 35DIN【25】TC2 5STEP 3DIN【26】TC2 5STEP 4DIN【27】POP WELD COMPLETEDIN【31】GUN COVER OPENDIN【32】GUN COVER CLOSE LSDIN 25 - 32 RACK: 81 SLOT: 15 PORT: 43DIN【33】HAND COVER OPENDIN【34】HAND COVER CLOSEDIN【35】AHC COVER-3 OPEN LSDIN【36】AHC COVER-3 CLOSE LSDIN【37】AHC COVER-4 OPEN LSDIN【38】AHC COVER-4 CLOSE LSDIN【39】GUN1 2ND ST OPEN LSDIN【40】GUN2 2ND ST OPEN LSDIN 33 - 40 RACK: 81 SLOT: 15 PORT: 51 DIN【41】CHUCK OPEN CONFIRMDIN【42】CHUCK CLOSE CONFIRMDIN【43】AHC FACEDIN【47】ROBOT 2ND STARTDIN 41 - 48 RACK: 81 SLOT: 15 PORT: 59 DIN【49】WELD COMPLETEDIN【55】STYLE1DIN【56】STYLE2DIN 49 - 56 RACK: 81 SLOT: 15 PORT: 67 DIN【57】STYLE4DIN【58】STYLE8DIN【59】STYLE16DIN【60】STYLE32DIN【61】STYLE64DIN【62】STYLE128DIN【63】GUN1 STEADDIN【64】HAND STEADDIN 57 - 64 RACK: 81 SLOT: 15 PORT: 75 DIN【65】TOOL STEAD 3DIN【66】TOOL STEAD 4DIN【71】Jig Non-int.DIN【72】Shuttle Nnn-int.DIN 65 - 72 RACK: 81 SLOT: 15 PORT: 83 DIN【74】Weld Enable 1DIN【75】Weld Enable 2DIN【76】Robot_G Weld Comp.1DIN【79】Pick Up Ok FeederDIN 73 - 80 RACK: 81 SLOT: 15 PORT: 91 DIN【81】Hand Jig Conf.DIN【82】Hand Rock Adv CompDIN【83】Jig Cover Close Comp.DIN【84】Hand Rock Ret Comp.DIN【85】Jig Cover Open Comp.DIN【86】Robct_G I/L1DIN【87】Robot_G I/L2DIN 81 - 88 RACK: 81 SLOT: 15 PORT: 99DIN【94】Sealer HoldDIN 89 - 96 RACK: 81 SLOT: 15 PORT: 107 DIN【101】DIN【104】DIN 97 - 104 RACK: 81 SLOT: 15 PORT: 115 DIN【106】PART IN STATION CONFIRMDIN【107】ROBOT AWAY FROM STATIONDIN【109】GUN IN STATIONDIN【110】HANDKING IN STATIONDIN 105 - 110 RACK: 81 SLOT: 15 PORT: 123 DIN【113】SEALING MATERIAL OKDIN【114】SEALING MATERIAL LACKINGDIN【116】HEATING NOT OKDIN 113 - 120 RACK: 82 SLOT: 6 PORT: 1 DIN 121 - 128 RACK: 82 SLOT: 6 PORT: 9 DIN【129】Clamp 1 openDIN【130】Clamp 1 closedDIN【131】Clamp 2 openDIN【132】Clamp 2 closedDIN【133】Clamp 3 openDIN【134】Clamp 3 closedDIN【135】Clamp 4 openDIN【136】Clamp 4 closedDIN 129 - 136 RACK: 82 SLOT: 4 PORT: 1 DIN【137】Clamp 5 openDIN【138】Clamp 5 closedDIN【139】Clamp 6 openDIN【140】Clamp 6 closedDIN【141】_DIN【142】_DIN【143】_DIN【144】_DIN 137 - 144 RACK: 82 SLOT: 4 PORT: 9 DIN【145】Part present 1DIN【146】Part present 2DIN【149】2-1-ONDIN【150】2-1-OFFDIN【151】2-2-ONDIN【152】2-2-OFFDIN 145 - 152 RACK: 82 SLOT: 5 PORT: 1 DIN【153】2-3-OFFDIN【154】2-4-OFFDIN【157】3-1-OFFDIN【158】3-1-ONDIN【159】3-2-OFFDIN【160】3-2-ONDIN 153 - 160 RACK: 82 SLOT: 5 PORT: 9 DOUT【1】ROBOT USER ALARMDOUT【2】STYLE VAERITY FAULTDOUT【5】GUN COVER OPENDOUT【6】GUN COVER CLOSEDOUT【7】HAND COVER OPENDOUT【8】HAND COVER CLOSEDOUT 1 - 8 RACK: 81 SLOT: 15 PORT: 21 DOUT【9】AHC COVER-3 OPENDOUT【10】AHC COVER-3 CLOSEDOUT【11】AHC COVER-4 OPENDOUT【12】AHC COVER-4 CLOSEDOUT【14】TIP WEAR OVER MOVEDOUT【15】TIP WEAR OVER FIXDOUT【16】TIP CHANGE POSITIONDOUT 9 - 16 RACK: 81 SLOT: 15 PORT: 29 DOUT【17】TC1 GUN FAULT CHECKDOUT【18】TC1 OFF_SET MEASURINGDOUT 17 - 24 RACK: 81 SLOT: 15 PORT: 37 DOUT【29】DRESSOR-1 STARTDOUT【30】DRESSOR-2 STARTDOUT【31】DRESSOR SHIFT1 ADV.SERVODOUT【32】DRESSOR SHIFT2 ADV.SERVODOUT 25 - 32 RACK: 81 SLOT: 15 PORT: 45 DOUT【33】POP START1DOUT【34】POP START2DOUT【35】POP START3DOUT【36】POP START4DOUT【37】POP WELD CONDITION 1DOUT【38】POP WELD CONDITION 2DOUT【39】POP WELD CONDITION 4DOUT【40】POP WELD CONDITION 8DOUT 33 - 40 RACK: 81 SLOT: 15 PORT: 53 DOUT【41】POP WELD CONDITION 16DOUT【42】POP WELD CONDITION 32DOUT【43】POP SWING ADV.DOUT【45】WORK COMPLETEDOUT【46】Shuttle Run EnableDOUT【47】2nd Work Comp.DOUT【48】GUN1 PRESSDOUT 41 - 48 RACK: 81 SLOT: 15 PORT: 61 DOUT【51】UNCHUCK POSITIONDOUT【52】AHC FaceDOUT【53】CHUCK OPENDOUT【54】CHUCK CLOSEDOUT【55】Sealer FaultDOUT【56】Sealer EM.StopDOUT 49 - 56 RACK: 81 SLOT: 15 PORT: 69 DOUT【57】Sealer LowDOUT【58】SEAL AIR PRESSDOUT【61】WELD CONDITION 1DOUT【62】WELD CONDITION 2DOUT【63】WELD CONDITION 4DOUT【64】WELD CONDITION 8DOUT 57 - 64 RACK: 81 SLOT: 15 PORT: 77 DOUT【65】WELD CONDITION16DOUT【66】WELD CONDITION32DOUT【67】WELD CONDITION64DOUT【68】WELD CONDITION128DOUT【69】Jig Non-int.DOUT【70】Shuttle Non-int.DOUT【71】Tip Change Run.DOUT【72】Tip Dress Run.DOUT 65 - 72 RACK: 81 SLOT: 15 PORT: 85 DOUT【77】Fdr. Non-int.DOUT【78】Fdr. unload comp.DOUT【80】Jig Hand ClampDOUT 73 - 80 RACK: 81 SLOT: 15 PORT: 93 DOUT【81】Jig Cover CloseDOUT【82】Jig Hand UnclampDOUT【83】Jig Cover OpenDOUT【84】Robot_G I/L1DOUT【85】Robot_G I/L2DOUT 81 - 88 RACK: 81 SLOT: 15 PORT: 101 DOUT【90】SEALING MATERIAL LACKINGDOUT【91】SEALING HEATING NOT OKDOUT【92】SEALING GUN OPENDOUT【94】CC-LINK STATUSDOUT【95】CC-LINK STATUSDOUT【96】CC-LINK STATUSDOUT 89 - 96 RACK: 81 SLOT: 15 PORT: 109 DOUT【97】CC-LINK STATUSDOUT【98】CC-LINK STATUSDOUT【99】CC-LINK STATUSDOUT【100】CC-LINK STATUSDOUT【101】CC-LINK STATUSDOUT【103】DOUT【104】JIG CLAMP OPEN REQUESTDOUT 97 - 104 RACK: 81 SLOT: 15 PORT: 117DOUT【106】PART IN STATIONDOUT 105 - 108 RACK: 81 SLOT: 15 PORT: 125DOUT【113】SEALING STARTDOUT【114】SEALING STOPDOUT 113 - 120 RACK: 82 SLOT: 6 PORT: 1 DOUT 121 - 128 RACK: 82 SLOT: 6 PORT: 9 DOUT【129】SPAREDOUT【130】SPAREDOUT【131】CLAMP_3_ONDOUT【132】CLAMP_3_OFFDOUT【133】CLAMP_2_ONDOUT【134】CLAMP_2_OFFDOUT【135】CLAMP_1_ONDOUT【136】CLAMP_1_OFFDOUT 129 - 136 RACK: 82 SLOT: 4 PORT: 1 DOUT【137】SPAREDOUT【138】SPAREDOUT【139】_DOUT【140】_DOUT【141】_DOUT【142】_DOUT【143】_DOUT【144】_DOUT 137 - 144 RACK: 82 SLOT: 4 PORT: 9GIN【1】Style No.GIN 1 RACK: 81 SLOT: 15 PORT: 73 #NUM: 8 GOUT 1 RACK: 81 SLOT: 15 PORT: 81 #NUM: 6 UI【1】*IMSTPUI【2】*HoldUI【3】*SFSPDUI【4】Cycle stopUI【5】Fault resetUI【6】StartUI【7】HomeUI【8】EnableUI 1 - 8 RACK: 81 SLOT: 15 PORT: 1UI【9】RSR1/PNS1UI【10】RSR2/PNS2UI【11】RSR3/PNS3UI【12】RSR4/PNS4UI【13】RSR5/PNS5UI【14】RSR6/PNS6UI【15】RSR7/PNS7UI【16】RSR8/PNS8UI 9 - 16 RACK: 81 SLOT: 15 PORT: 9UI【17】PNS strobeUI【18】Prod startUI 17 - 18 RACK: 81 SLOT: 15 PORT: 17 UO【1】Cmd enabledUO【2】System readyUO【3】Prg runningUO【4】Prg pausedUO【5】Motion heldUO【6】FaultUO【7】At perchUO【8】TP enabledUO 1 - 8 RACK: 81 SLOT: 15 PORT: 1 UO【9】Batt alarmUO【10】BusyUO【11】ACK1/SNO1UO【12】ACK2/SNO2UO【13】ACK3/SNO3UO【14】ACK4/SNO4UO【15】ACK5/SNO5UO【16】ACK6/SNO6UO 9 - 16 RACK: 81 SLOT: 15 PORT: 9 UO【17】ACK7/SNO7UO【18】ACK8/SNO8UO【19】SNACKUO【20】ReservedUO 17 - 20 RACK: 81 SLOT: 15 PORT: 17</PRE><H2><A NAME="6">Safety Status Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>SAFETY SIGNALS::External ESTOP FALSESOP Estop FALSETP ESTOP FALSEHand Broken TRUEOverTravel FALSELow Air Alarm FALSEFence Open FALSEBelt Broken FALSETP Enable FALSETP Deadman FALSESVOFF Detect FALSEServo Disconnect FALSENon Teacher Enb FALSE</PRE><H2><A NAME="7">Current Position Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>CURRENT ROBOT POSITION::Group #: 1CURRENT JOINT POSITION:Joint 1: 98.31Joint 2: -21.86Joint 3: -15.51Joint 4: 3.71Joint 5: -60.75Joint 6: 227.81EXTAXS: 1: 1036.33Frame #: 0 Tool #: 2CURRENT USER FRAME POSITION:X: -559.31Y: 1592.64Z: 151.27W: -.58P: -12.93R: 89.70CFG: N U T, 0, 0, 1EXTAXS: 1: 1036.33Tool #: 2CURRENT WORLD POSITION:X: -559.31Y: 1592.64Z: 151.27W: -.58P: -12.93R: 89.70CFG: N U T, 0, 0, 1EXTAXS: 1: 1036.33CURRENT ROBOT POSITION::。
fanuc机器人资料

4
FA & ROBOT
IImmpprroovveemmeennttooffMMoottiioonnPPeerrffoorrmmaannccee
Payload at wrist
Reach
J1
J2
J3 Maximum speed
J4
J5
J6
J4
Allowable load moment at wrist
J5
J6
J4
Allowable load inertia at wrist
J5
J6
Repeatability
165 kg 2650mm 105 deg/sec 105 deg/sec 105 deg/sec 130 deg/sec 130 deg/sec 210 deg/sec 921 Nm 921 Nm 461 Nm 78.4 kgm2 78.4 kgm2 40.2 kgm2 ±0.3mm
3D sensor 2D sensor
2
FA & ROBOT
CCoonnffiigguurraattiioonn
R-2000iA Mechanical Unit
R-2000iA Controller
(R-J3iB)
• Same operation as R-J3 • Same programs of R-J3 can be used
Intelligent software function
B-65395CM_01伺服马达维修说明书3

s-1
为了安全使用
1.1
警告、注意和注释
B-65395CM/01
“为了安全使用”,保证操作人员人身安全以及防止机床损坏,文中叙述了有关 安全的注意事项。根据它们在安全方面的重要程度,在正文中以“警告”和“注 意”来叙述。 有关的补充说明以“注释”来叙述。 在使用之前,必须熟读这些“警告”、“注意”和“注释”中所叙述的事项。
目录 1.1 警告、注意和注释 ............................................................................................ s-2 1.2 FANUC AC SERVO MOTOR βis series........................................................... s-3
FANUC说明书列表

FANUC CD-ROM Manual说明书列表(A08B-9012-J001#CM)Version 1.0返回主画面English从说明书PDF文件返回列表时,请选择浏览器上的“返回”。
FANUC Series 0i/0i Mate-MODEL CFANUC Series 0i-TC 操作说明书B-64114CM/01 FANUC Series 0i-MC 操作说明书B-64124CM/01 FANUC Series 0i Mate-TC 操作说明书B-64134CM/01 FANUC Series 0i Mate-MC 操作说明书B-64144CM/01 FANUC Series 0i-MODEL C/0i Mate-MODEL C 维修说明书B-64115CM/01 FANUC Series 0i-MODEL C/0i Mate-MODEL C 参数说明书B-64120CM/01FANUC AC SERVO/SPINDLE MOTORαi/βi series参数说明书B-65270CM/04 FANUC AC SPINDLE MOTOR Alpha i/Beta i series参数说明书B-65280CM/04 FANUC AC SERVO MOTOR Alpha i s/Alpha i series,AC SPINDLE MOTOR Alpha i series,SERVO AMPLIFIER Alpha i series维修说明书B-65285CM/03FANUC AC SERVO MOTOR Beta i s series,AC SPINDLE MOTOR Beta i series,SERVO AMPLIFIER Beta i series维修说明书B-65325CM/01FANUC SERVO AMPLIFIER Beta i series I/O Link Option维修说明书B-65395CM/01FANUC CD-ROM Manual说明书列表(A08B-9012-J002#CM)Version 2.0返回主画面English从说明书PDF文件返回列表时,请选择浏览器上的“返回”。
FANUC伺服电机中文参数说明_图文

FANUC AC SERVO MOTOR #*s series FANUC AC SPINDLE MOTOR #* series FANUC SERVO AMPLIF IER #* series维修说明书B-65325CM/01·本说明书的任何内容不得以任何方式复制。
·所有参数指标和设计可随时修改,恕不另行通知。
我们试图在本说明书中描述尽可能多的情况。
然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。
因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-65325CM/01为了安全使用为了安全使用为了使您更安全的使用本公司的伺服电机、主轴电机以及伺服放大器(βi SVM βiSVPM,本公司已将相应的注意事项写入“为了安全使用”中。
请在使用电机及放大器之前仔细阅读“为了安全使用”。
另外,有关电机和放大器的各项功能请参阅本篇,请在完全理解的基础上正确使用。
还有,对于“为了安全使用”中没有记录的事项,原则上是禁止操作的。
有关此方面的事项请在操作前预先与本公司进行联系。
目录1.1 警告、注意、注释............................................................................................s-21.2 FANUC AC SERVO MOTOR βi s series,FANUC AC SPINDLE MOTOR βi series.........................................................s-3 1.2.1 警告..................................................................................................s-31.2.2 注意..................................................................................................s-51.2.3 注释..................................................................................................s-61.3 FANUC SERVO AMPLIFIER βi series............................................................s-8 1.3.1 安装时的警告及注意.......................................................................s-81.3.1.1 警告............................................................................................s-81.3.1.2 注意............................................................................................s-91.3.1.3 注释..........................................................................................s-101.3.2 试运行时的警告及注意.................................................................s-111.3.2.1 警告..........................................................................................s-111.3.2.2 注意..........................................................................................s-121.3.3 维护时的警告及注意.....................................................................s-131.3.3.1 警告..........................................................................................s-131.3.3.2 注意..........................................................................................s-141.3.3.3 注释..........................................................................................s-14为了安全使用B-65325CM/01 1.1 警告、注意、注释“为了安全使用”中为了保证操作人员人身安全以及防止机床损坏的有关安全的注意事项,并根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来描述。
FANUCSeries0iF系统加工中心系统操作编程说明书B-64604CM-2_01.PDF

FANUCSeries0iF系统加⼯中⼼系统操作编程说明书B-64604CM-2_01.PDFFANUC Series 0+-MODEL F加⼯中⼼系统操作说明书B-64604CM-2/01·本说明书的任何内容不得以任何⽅式复制。
·本机的外观及规格如需改良⽽变更,恕不另⾏通知。
本说明书中所载的产品,受到⽇本国《外汇和外国贸易法》的限制。
从⽇本将这些出⼝到其他国家时,必须获得⽇本国政府的出⼝许可。
另外,将该产品再出⼝到其他国家时,应获得再出⼝该产品的国家的政府许可。
此外,该产品可能还受到美国政府的再出⼝法的限制。
若要出⼝或者再出⼝此类产品,请向FANUC公司洽询。
本说明书中记载的商品是在严格的质量管理下制造的,在因本商品的故障⽽预测会导致重⼤事故或者损失时,请对安全进⾏充分考虑。
我们试图在本说明书中描述尽可能多的情况。
然⽽,要在本说明书中注明所有禁⽌或不能做的事宜,需要占⽤说明书的⼤量篇幅,所以本说明书中没有⼀⼀列举。
因此,对于那些在说明书中没有特别指明可以做的事,都应解释为“不可”。
B-64604CM-2/01安全使⽤须知安全使⽤须知为了更加安全地使⽤CNC装置附带的机床(以下简称“机床”),“安全使⽤须知”描述与CNC装置相关的安装注意事项。
⽤户所使⽤的某些CNC装置虽然没有相对应的功能,但已经标上了该项注意事项,⽤户在阅读时可以忽略。
有关机床的安全注意事项,请参阅机床制造商提供的说明书。
凡是编写机床程序和进⾏机床操作的作业⼈员,必须在充分理解机床制造商提供的说明书和本说明书的内容后再使⽤。
⽬录警告、注意和注释........................................................................................................................................................................s-1 ⼀般警告和注意............................................................................................................................................................................s-1 与编程有关的警告和注意............................................................................................................................................................s-2 与操作有关的警告和注意............................................................................................................................................................s-3 与⽇常维护有关的警告................................................................................................................................................................s-4警告、注意和注释本说明书包括保证操作⼈员⼈⾝安全以及防⽌机床损坏的有关安全的注意事项,并根据它们在安全⽅⾯的重要程度,在正⽂中以“警告”和“注意”来叙述。
FANUC数控系统接线与调试介绍
FANUC数控系统接线与调试介绍FANUC数控系统接线与调试介绍FANUC数控系统是最畅销的机床控制系统之一。
目前,在国内使用的FANUC数控系统主要有0系统和0i系统。
针对广大用户的实际情况,本文简要叙述这两种系统的连接及调试,掌握了这两种系统,其它FANUC系统的调试则迎刃而解。
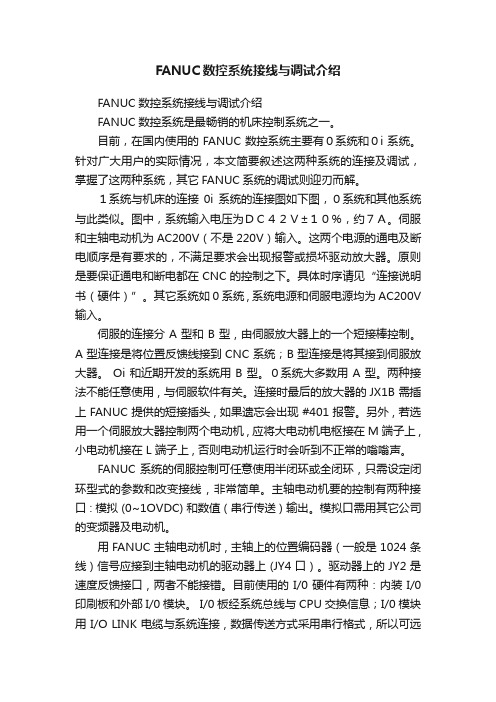
1系统与机床的连接0i系统的连接图如下图,0系统和其他系统与此类似。
图中,系统输入电压为DC42V±10%,约7A。
伺服和主轴电动机为AC200V(不是220V)输入。
这两个电源的通电及断电顺序是有要求的,不满足要求会出现报警或损坏驱动放大器。
原则是要保证通电和断电都在CNC的控制之下。
具体时序请见“连接说明书(硬件)”。
其它系统如 0 系统 , 系统电源和伺服电源均为 AC200V 输入。
伺服的连接分 A 型和 B 型 , 由伺服放大器上的一个短接棒控制。
A 型连接是将位置反馈线接到 CNC 系统;B 型连接是将其接到伺服放大器。
Oi 和近期开发的系统用 B 型。
0系统大多数用 A 型。
两种接法不能任意使用 , 与伺服软件有关。
连接时最后的放大器的JX1B 需插上 FANUC 提供的短接插头 , 如果遗忘会出现 #401 报警。
另外 , 若选用一个伺服放大器控制两个电动机 , 应将大电动机电枢接在 M 端子上 , 小电动机接在 L 端子上 , 否则电动机运行时会听到不正常的嗡嗡声。
FANUC 系统的伺服控制可任意使用半闭环或全闭环 , 只需设定闭环型式的参数和改变接线, 非常简单。
主轴电动机要的控制有两种接口 : 模拟 (0~1OVDC) 和数值 ( 串行传送 ) 输出。
模拟口需用其它公司的变频器及电动机。
用 FANUC 主轴电动机时 , 主轴上的位置编码器 ( 一般是 1024 条线 ) 信号应接到主轴电动机的驱动器上 (JY4 口 ) 。
驱动器上的 JY2 是速度反馈接口 , 两者不能接错。
目前使用的 I/0 硬件有两种 : 内装 I/0 印刷板和外部 I/0 模块。
FANUC Series 系统OI 0i-D参数说明书手册B-64310CM_01

注释 1 为了便于说明,有的情况下按照如下方式分类说明各机型。
T 系列:0i -TD / 0i Mate -TD M 系列:0i -MD / 0i Mate -MD 2 本说明书中描述的功能,根据不同的机型,有的不可使用。详情请参阅 规格说明书(B-64302CM)。 3 0i -D / 0i Mate -D 中,为了使部分基本功能有效或者无效,需要设定参 数。有关这些参数,请参照 4.51 节“与 0i -D / 0i Mate -D 基本相关的 参数”。
宏编译器/宏执行器编程说明书 MACRO COMPILER 操作说明书 C 语言执行器编程说明书
B-64303CM-2 B-64304CM -5 B-64303CM -3
PMC PMC 编程说明书 网络相关说明书
B-64393CM
PROFIBUS-DP 板操作说明书 FAST Ethernet/功能相关说明书
B-64404CM B-64414CM
MANUAL GUIDE i(车床系统/加工中心系统通用)操作 B-63874CM
说明书
MANUAL GUIDE i(加工中心系统)操作说明书
B-63874CM-2
MANUAL GUIDE i 设置指南 操作说明书
B-63874CM-1
MANUAL GUIDE 0i 操作说明书
警告 适用于:如果错误操作,则有可能导致操作者死亡或受重伤。
注意 适用于:如果错误操作,则有可能导致操作者受轻伤或者损坏设备。
注释 指出除警告和注意以外的补充说明。
※ 请仔细阅读本说明书,并加以妥善保管。
s-1
B-64310CM/01
前言
可以使用的机型名称
前言
本说明书就下列机型进行描述。 另外,正文中还使用下列简称。
IOLink设定
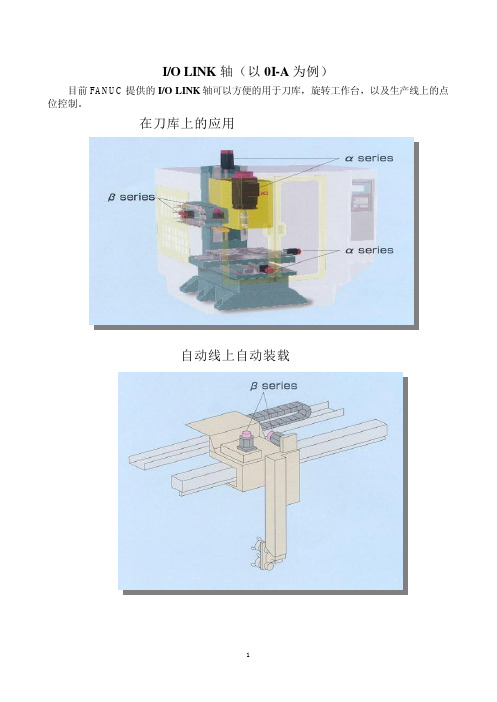
I/O LINK轴(以0I-A为例)目前FANUC提供的I/O LINK轴可以方便的用于刀库,旋转工作台,以及生产线上的点位控制。
在刀库上的应用自动线上自动装载当前FANUC提供的系统控制轴数如下表所示:系统16IB18IB21IB0I 0I-MATE-MB0I-MATE-TB 最大控制轴数8 6 4 4 3 2最大联动轴数 6 4 4 4 3 2当基本轴不够使用时,为了增加CNC的控制轴数,FANUC提供了Power Mate CNC管理功能。
使用I/O LINK轴就可解决基本轴不够用的问题。
Power Mate CNC管理功能(PMM )该功能通过I/O LINK 连接B伺服电机,电机的设定和显示可通过CNC进行,使用PMC可方便地对电机的运动进行控制。
连接形式如右图和下图所示:例: X 从 X20分配Y 从 Y20分配(由于I/O LINK 轴通过I/O LINK 与系统连接,服从I/O LINK 的分配原则)在设定I/O 模块的同时,确定参数960#3为0 确保CNC 与AMP 之间的通信设置不当 ,出现54#报警 ,即 I/O 模块没有连接上。
请检查该参数的设置,模块是否分配正确以及I/O LINK 电缆是否连接正确。
每个I/O LINK 控制轴占用I/O LINK 的128输入点和128输出点。
B 伺服放大器通过这128输入点,128输出点连接到主系统,即CNC 。
主系统中的梯形图通过I/O LINK 接口来给B 放大器传送运动指令并监测其运行状态。
硬件接线:B 放大器 JA35 EX IO 中接线的说明当不使用外部减速挡块时,默认设置为0,采用无挡块回零方式B 放大器 JA34 PLS IN 中接线的说明此接口用于外接脉冲发生器,需要特殊说明的是它不能直接用于连接我们常用的手摇脉冲发生器,它需要有一个FANUC 提供转接接口,另外使用此接口为选择功能。
需要单独选择方可使用。
急停互锁+ 超程 —超程I/O LINK轴有自己单独的参数设定画面和位置画面1)I/O LINK的参数画面,I/O LINK相关参数均在此画面进行设定2)I/O LINK的参数画面,此画面可监控I/O LINK轴运动状态(位置/速度)参数设置:与普通的伺服电机具有类似的伺服设定(以10mm 螺距,1:1减速比为例)初始化例:电机代码 指令倍乘比运动方向 参考计数器容量每转的脉冲数(分子) 每转的脉冲数(分母)信号:信号相对简单,一旦模块分配完成,各信号地址就确定。
FANUC Series OI 0iMC系统操作说明书手册B4

FANUC Series OI 0iMC系统操作说明书手册B4一、概述FANUC Series OI 0iMC系统是FANUC公司推出的一款高性能数控系统,专为现代机床控制而设计。
该系统结合了FANUC多年的数控技术积累和先进的计算机控制技术,为机床制造商和用户提供了稳定、高效、便捷的数控解决方案。
本操作说明书手册将详细介绍该系统的操作说明和常见问题解答,希望能为您提供帮助。
二、操作说明1、系统启动与关机按下系统面板上的电源按钮,系统将自动启动。
等待系统自检完成后,进入操作界面。
关机时,选择主菜单中的“关机”选项,按照提示进行操作。
2、手动操作在操作界面上,可以通过手动模式对机床进行点动、连续进给、快速移动等操作。
手动模式下,可以通过按下相应的轴控制按钮和进给倍率调整旋钮来实现机床的运动。
3、自动操作在自动模式下,可以通过编写程序来实现机床的自动加工。
程序编写需遵循FANUC数控编程语言标准,通过M代码来实现各种动作。
程序编写完成后,通过操作界面上的“运行”按钮启动程序。
4、参数设置在自动模式下,可以通过参数设置来调整机床的运动轨迹、加工速度、切削用量等参数。
参数设置在主菜单中的“参数”选项中,可以根据加工需求进行调整。
三、常见问题解答1、系统无法启动可能原因:电源故障、主板故障。
解决方法:检查电源连接是否正常,专业技术人员进行维修。
2、系统死机可能原因:程序运行异常、系统资源占用过多。
解决方法:重启系统,检查程序是否存在异常,优化系统资源。
21、坐标轴运动不准确可能原因:机械故障、控制系统故障。
解决方法:检查机械传动部分是否正常,专业技术人员进行维修。
211、加工表面质量差可能原因:刀具选择不当、切削参数设置不合理。
解决方法:选择合适的刀具和切削参数,提高加工工艺水平。
FANUC Series 系统OI TD用户手册说明书B4标题:FANUC Series系统OI TD用户手册说明书B4一、介绍FANUC Series系统OI TD是一种先进的数控系统,广泛应用于机械加工、汽车制造、航空航天等领域。
FANUC伺服产品新名称

类型名称: 伺服电机 主轴电机 伺服放大器 主轴放大器
ห้องสมุดไป่ตู้a a a a
iS 8/4000 HV iI 8/8000 HV iS V 40/80 HV iS P 30 HV
系列名称 系列名称 系列名称 系列名称
额定转矩/最高转速 额定输出功率/最高转速 最大电流(L)/最大电流(M) 额定输出功率
400V系列加HV 400V系列加HV 400V系列加HV 400V系列加HV
伺服产品新名称
旧名称 AC SERVO MOTOR a is series 伺服 电机 AC SERVO MOTOR a i series AC SERVO MOTOR ßis series AC SPINDLE MOTOR a i series AC SPINDLE MOTOR a IP series 主轴 电机 AC SPINDLE MOTOR a IT series AC SPINDLE MOTOR a IL series AC SPINDLE MOTOR ßi series SERVO AMPLIFIER a i series ( SVM) SERVO AMPLIFIER a i series ( SPM) 伺服 放大 器 SERVO AMPLIFIER a i series ( PSM ) SERVO AMPLIFIER ßi series ( SVM) SERVO AMPLIFIER ßi series ( SVPM) SERVO AMPLIFIER a iPSR series AC SPINDLE MOTOR ßi series AC SPINDLE MOTOR a series 新名称 总称 AC SERVO MOTOR a series 系列名称 备注 稀土磁体电机 铁氧体电机 稀土磁体电机 电磁感应电机 电磁感应电机、宽域输出 电磁感应电机、中央冷却 电磁感应电机、液体冷却 电磁感应电机 电磁感应电机、宽域输出 伺服放大器 主轴放大器 共用电源
Fanuc 16 18 21 Servo 报警列表及其含义说明书

Fanuc 16/18/21 S ervo A larm L istNumber Message Contents400 SERVO A LARM: n–TH A XISOVERLOADThe n–th a xis (axis 1–8) o verload s ignal i s o n. R efer t o d iagnosisdisplay N o. 201 f or d etails.401 SERVO A LARM: n–TH A XISVRDY O FFThe n–th a xis (axis 1–8) s ervo a mplifier R EADY s ignal (DRDY)went o ff. R efer t o t he p rocedure o f t roubleshooting.404 SERVO A LARM: n–TH A XISVRDY O NEven t hough t he n–th a xis (axis 1–8) R EADY s ignal (MCON)went o ff, t he s ervo a mplifier R EADY s ignal (DRDY) i s s till o n. O r,when t he p ower w as t urned o n, D RDY w ent o n e ven t houghMCON w as o ff. C heck t hat t he s ervo i nterface m odule a nd s ervoamp a re c onnected.405 SERVO A LARM: (ZERO P OINTRETURN F AULT)Position c ontrol s ystem f ault. D ue t o a n N C o r s ervo s ystem f aultin t he r eference p osition r eturn, t here i s t he p ossibility t hatreference p osition r eturn c ould n ot b e e xecuted c orrectly. T ryagain f rom t he m anual r eference p osition r eturn.407 SERVO A LARM: E XCESSERRORThe d ifference i n s ynchronous a xis p osition d eviation e xceededthe s et v alue.409 SERVO A LARM: n A XISTORQUE A LMAbnormal s ervo m otor l oad h as b een d etected. A lternatively,abnormal s pindle m otor l oad h as b een d etected i n C s m ode.410 SERVO A LARM: n–TH A XIS –EXCESS E RRORThe p osition d eviation v alue w hen t he n–th a xis (axis 1–8) s topsis l arger t han t he s et v alue.Refer t o t he p rocedure o f t roubleshooting.411 SERVO A LARM: n–TH A XIS –EXCESS E RRORThe p osition d eviation v alue w hen t he n–th a xis (axis 1–8)moves i s l arger t han t he s et v alue.Refer t o t he p rocedure o f t roubleshooting.413 SERVO A LARM: n–th A XIS –LSI O VERFLOWThe c ontents o f t he e rror r egister f or t he n–th a xis (axis 1–8)exceeded 231 p ower. T his e rror u sually o ccurs a s t he r esult o f a nimproperly s et p arameter.414 SERVO A LARM: n–TH A XIS– D ETECTION R ELATEDERRORN–th a xis (axis 1–8) d igital s ervo s ystem f ault. R efer t o d iagnosisdisplay N o. 200 a nd N o.204 f or d etails.415 SERVO A LARM: n–TH A XIS –EXCESS S HIFTA s peed h igher t han 511875 u nits/s w as a ttempted t o b e s et i nthe n–th a xis (axis 1–8). T his e rror o ccurs a s t he r esult o fimproperly s et C MR.416 SERVO A LARM: n–TH A XIS –DIS C ONNECTIONPosition d etection s ystem f ault i n t he n–th a xis (axis 1–8) p ulsecoder (disconnection a larm). R efer t o d iagnosis d isplay N o. 201for d etails.ALARM L ISTDetails o f s ervo a larm N o.414The d etails o f s ervo a larm N o. 414 a re d isplayed i n t he d iagnosis d isplay (No. 200 a nd N o.204) a s s hown below.DGN 200#7 (OVL) : A n o verload a larm i s b eing g enerated. #6 (LV) : A l ow v oltage a larm i s b eing g enerated i n s ervo a mp.#5 (OVC) : A o vercurrent a larm i s b eing g enerated i nside o f d igital s ervo. #4 (HCA) : A n a bnormal c urrent a larm i s b eing g enerated i n s ervo a mp. #3 (HV A) : A n o vervoltage a larm i s b eing g enerated i n s ervo a mp.#2 (DCA) : A r egenerative d ischarge c ircuit a larm i s b eing g enerated i n s ervo a mp. #1 (FBA) : A d isconnection a larm i s b eing g enerated. #0 (OFA) : A n o verflow a larm i s b eing g enerated i nside o f d igital s ervo.417SERVO A LARM: n –TH A XIS –PARAMETER I NCORRECT This a larm o ccurs w hen t he n –th a xis (axis 1–8) i s i n o ne o f t heconditions l isted b elow. (Digital s ervo s ystem a larm) 1) T he v alue s et i n P arameter N o. 2020 (motor f orm) i s o ut o f t hespecified l imit. 2) A p roper v alue (111 o r –111) i s n ot s et i n p arameter N o.2022 (motor r evolution d irection). 3) I llegal d ata (a v alue b elow 0, e tc.) w as s et i n p arameter N o. 2023 (number o f s peed f eedback p ulses p er m otor r evolution). 4) I llegal d ata (a v alue b elow 0, e tc.) w as s et i n p arameter N o. 2024 (number o f p osition f eedback p ulses p er m otor r evolution). 5) P arameters N o. 2084 a nd N o. 2085 (flexible f ield g ear r ate) have n ot b een s et. 6) A v alue o utside t he l imit o f {1 t o t he n umber o f c ontrol a xes} o r a n on– c ontinuous v alue (Parameter 1023 (servo a xis number) c ontains a v alue o ut o f t he r ange f rom 1 t o t he number o f a xes, o r a n i solated v alue (for e xample, 4 n ot preceded b y 3).was s et i n p arameter N o. 1023 (servo a xis number).Number C ontents M essage420SERVO A LARM: n A XISSYNC T ORQUE (M s eries) During s imple s ynchronous c ontrol, t he d ifference b etween t hetorque c ommands f or t he m aster a nd s lave a xes e xceeded t he value s et i n p arameter N o. 2031. 421SERVO A LARM: n A XIS EXCESS E R (D)The d ifference b etween t he e rrors i n t he s emi–closed l oop a nd closed l oop h as b ecome e xcessive d uring d ual p osition feedback. C heck t he v alues o f t he d ual p osition c onversion coefficients i n p arameters N o. 2078 a nd 2079.#7 #6 #5 #4 #3 #2 #1 #0 OVL LVOVCHCAHV ADCAFBAOFADGN 204#6 (OFS) : A c urrent c onversion e rror h as o ccurred i n t he d igital s ervo. #5 (MCC) : A m agnetic c ontactor c ontact i n t he s ervo a mplifier h as w elded. #4 (LDA) : T he L ED i ndicates t hat s erial p ulse c oder C i s d efective#3 (PMS) : A f eedback p ulse e rror h as o ccured b ecause t he f eedback c able i s d efective.Details o f s ervo a larms N o. 400 a nd N o. 416The d etails o f s ervo a larms N o. 400 a nd N o. 416 a re d isplayed i n t he d iagnosis d isplay (No. 201) a s shown b elow.DGN 201:When O VL e qual 1 i n d iagnostic d ata N o.200 (servo a larm N o. 400 i s b eing g enerated):#7 (ALD)0 : M otor o verheating1 : A mplifier o verheatingWhen F BAL e qual 1 i n d iagnostic d ata N o.200 (servo a larm N o. 416 i s being g enerated):#7 #6 #5 #4 #3 #2 #1 #0OFSMCCLDAPMS#7 #6 #5 #4 #3#2#1#0ALDEXPALD EXP Alarm d etails1 0 Built–in p ulse c oder d isconnect (hardware) 1 1 Separately i nstalled p ulse c oderdisconnection (hardware)Pulse c oder i s n ot c onnected d ue t o s oftware.。
FANUC 阿尔法电机性能与β电机性能对比
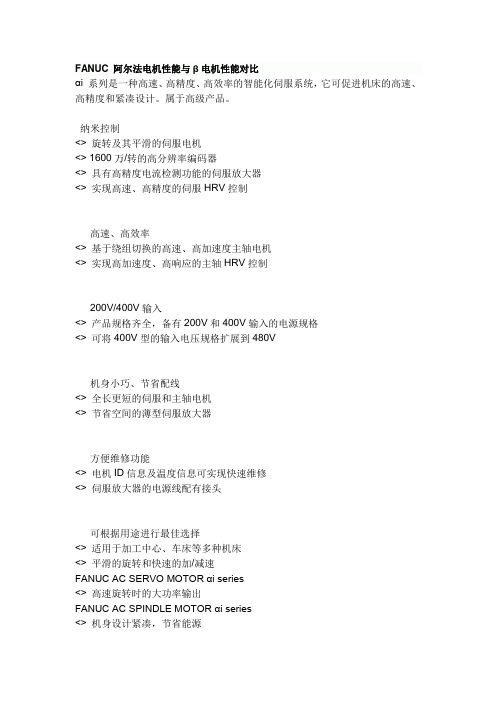
FANUC 阿尔法电机性能与β电机性能对比αi 系列是一种高速、高精度、高效率的智能化伺服系统,它可促进机床的高速、高精度和紧凑设计。
属于高级产品。
纳米控制<> 旋转及其平滑的伺服电机<> 1600万/转的高分辨率编码器<> 具有高精度电流检测功能的伺服放大器<> 实现高速、高精度的伺服HRV控制高速、高效率<> 基于绕组切换的高速、高加速度主轴电机<> 实现高加速度、高响应的主轴HRV控制200V/400V输入<> 产品规格齐全,备有200V和400V输入的电源规格<> 可将400V型的输入电压规格扩展到480V机身小巧、节省配线<> 全长更短的伺服和主轴电机<> 节省空间的薄型伺服放大器方便维修功能<> 电机ID信息及温度信息可实现快速维修<> 伺服放大器的电源线配有接头可根据用途进行最佳选择<> 适用于加工中心、车床等多种机床<> 平滑的旋转和快速的加/减速FANUC AC SERVO MOTOR αi series<> 高速旋转时的大功率输出FANUC AC SPINDLE MOTOR αi series<> 机身设计紧凑,节省能源FANUC SERVO AMPLIFIER αi series<> 在短时间内实现高速、高精度的伺服调整FANUC SERVO GUIDE节省能量的伺服系统<> 作为荣获1999年度优秀节能设备通产大臣奖的α系列之后开发的机型,节能效果更佳<> FANUC大型伺服电机αi系列,荣获2003年度优秀节能设备资源能源厅长官奖。
βi系列是一种可靠性强、性价比卓越的伺服系统。
属于低端经济型产品。
该系列用于机床的进给轴和主轴,具有充足的性能和功能。
FANUC沈阳机床立式加工中心电机代码说明

No.
文件信息
文件名称
沈阳机床中捷立加事业部 VMC 系列标准 参数电机代码说明
类别 基础连接调试
发布对象
沈阳机床 B3 事业部关键词:机代码发布日期 2016.05.20
注:本文档为北京发那科机电有限公司面向沈阳机床技术文档,请勿外传。
沈阳机床中捷立加事业部 VMC 系列标准参数 电机代码说明
电机代码 402 403 424 316 404 400 320 400
说明
双绕组电机使用代码 400 初始化后修改参数,见附录 2。 请使用代码 400 初始化后修改参数,见附录 5
αiIT 系列主轴电机
电机型号 αiIT 15/10000 αiIT 15/15000 αiIT 22/10000
αiI 12/12000 αiSP 15 (TYPE A)
αiM sensor 256 teeth
Low speed range
High speed range
Parameter No. 11/15 Kw
Parameter No. 11/15 kW
FS15i
FS21i 1500/12000
FS16i
DRAW. No. B-65262EN/06-07
CUST.
SHEET
FANUC CORPORATION
5/15
1
附录2
Spindle parameter table [SPINDLE HRV Control] (2006.09.14)
MTB: GENERAL Spindle Motor: A06B-1428-B120#0121 Spindle Amplifier: A06B-6111-H015#H550
FANUC ALPHA-i系列电机放大器模块故障诊断与处理说明书
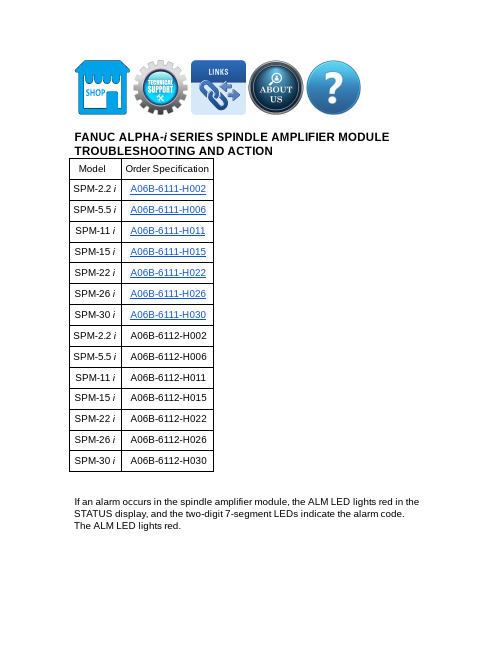
FANUC A LPHA- i S ERIES S PINDLE A MPLIFIER M ODULE TROUBLESHOOTING A ND A CTIONIf a n a larm o ccurs i n t he s pindle a mplifier m odule, t he A LM L ED l ights r ed i n t he STATUS d isplay, a nd t he t wo-digit 7-segment L EDs i ndicate t he a larm c ode. The A LM L ED l ights r ed.Model Order S pecificationSPM-2.2 i A06B-6111-H002SPM-5.5 i A06B-6111-H006SPM-11 i A06B-6111-H011SPM-15 i A06B-6111-H015SPM-22 i A06B-6111-H022SPM-26 i A06B-6111-H026SPM-30 i A06B-6111-H030SPM-2.2 i A06B-6112-H002SPM-5.5 i A06B-6112-H006SPM-11 i A06B-6112-H011SPM-15 i A06B-6112-H015SPM-22 i A06B-6112-H022SPM-26 i A06B-6112-H026SPM-30 i A06B-6112-H030KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 01The i nside t emperature o f t he m otor i s h igher t han t he s pecified t emperature.(1)If t his a larm i s i ssued d uring c utting (the m otor t emperature i shigh)(a)Check t he c ooling s tate o f t he m otor.<1>If t he c ooling f an o f t he s pindle m otor i s s topped,check t he p ower s upply o f t he c ooling f an. I f t he c ooling f anis s till i noperative, r eplace i t w ith a n ew o ne.<2>When a l iquid-cooled m otor i s u sed, c heck t hecooling s ystem.<3>When t he a mbient t emperature o f t he s pindlemotor i s h igher t han t he s pecified t emperature, l ower t heambient t emperature t o s atisfy t he s pecification.(b)If t his a larm i s i ssued e ven w hen t he l oad m eter f luctuatesin a l imited r ange, c heck t he s hort-period r ating. I f t hespecified v alue i s e xceeded, r educe t he l oad.(2)If t his a larm i s i ssued u nder a l ight l oad (the m otor t emperatureis h igh)(a)When t he f requency o f a cceleration/deceleration i s t oohigh s et s uch a c ondition t hat t he a verage i ncluding o utput a tacceleration/deceleration d oes n ot e xceed t he c ontinuousrating.(b)The p arameters s pecific t o t he m otor a re n ot c orrectly.Referring t o "FANUC A C S PINDLE M OTOR i s eriesParameter M anual (B-65280EN)," c heck t he m otor-specificparameters.(3)If t his a larm i s i ssued w hen t he m otor t emperature i s l ow(a)The s pindle m otor f eedback c able i s f aulty. R eplace t hecable.(b)The c ontrol p rinted c ircuit b oard i s f aulty. R eplace t hecontrol p rinted c ircuit b oard o r s pindle a mplifier.(c)The m otor (internal t hermostat) i s f aulty. R eplace t hemotor.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 02The a ctual m otor s peed i s l argely d eviated f rom t he c ommanded s peed.(1)If t his a larm i s i ssued d uring m otor a cceleration(a)The p arameter s etting o f a cceleration/deceleration t ime i sincorrect. S et t he f ollowing p arameter w ith t he a ctualacceleration/deceleration t ime f or y our m achine p lus s omemargin.Fanuc-15i P RM 3082 o r F anuc-16i/18i/21i P RM 4082Setting o f a cceleration/deceleration t ime(b)The p arameter f or t he s peed d etector i s n ot s et c orrectly.Refer t o "FANUC A C S PINDLE M OTOR i s eries P arameterManual (B-65280EN)," a nd s et a c orrect v alue.(2)If t his a larm i s i ssued a t a h eavy c utting l oad(a)The c utting l oad h as e xceeded t he m otor o utput p ower.Check t he l oad m eter i ndication, a nd r eview t he u secondition.(b)The p arameters f or o utput r estriction a re n ot s et c orrectly.Check t hat t he s ettings o f t he f ollowing p arameters s atisfythe m achine a nd m otor s pecifications:Fanuc-15i P RM 3028 F anuc-16i/18i/21i P RM 4028Output r estriction p attern s ettingFanuc-15i P RM 3029 F anuc-16i/18i/21i P RM 4029Output r estriction v alue(c)The p arameters s pecific t o t he m otor a re n ot c orrectly.Refer t o "FANUC A C S PINDLE M OTOR i s eries P arameterManual (B-65280EN)," a nd c heck t he m otor-specificparameters.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 03The f use o f t he D C l ink h as b lown. (The v oltage a t t he D C l ink i s insufficient.) T his a larm i s c hecked w hen e mergency s top i s c ancelled.(1)If t his a larm i s i ssued d uring s pindle o peration (rotation) T he f useof t he D C l ink i nside t he S PM h as p robably b lown. S o, r eplace t heSPM. T his a larm m ay b e c aused b y t he f ollowing:<1>Power l ead s hort-circuited t o g round<2>Motor w inding s hort-circuited t o g round<3>IGBT o r I PM m odule f ailure(2) I f t he P SM i nput m agnetic c ontactor i s o nce t urned o n a nd i sturned o ff w ith t his a larm w hen e mergency s top i s c ancelled o r t heCNC i s s tarted (When t wo s pindles a re c onnected, t he m agneticcontactor m ay n ot b e t urned o ff.)(a)The D C l ink w ire i s n ot c onnected. C heck t he D C l inkwiring f or e rrors.(b)A c able i s f aulty. P in 9o f t he i nterface c able (CXA2BCXA2A) b etween t he P SM a nd S PM m ay b e s hort-circuitedto 0V. R eplace t he c able.(c)The f use o f t he D C l ink i nside t he S PM h as b lown.Replace t he S PM.Alarm C ode 06The t emperature s ensor i s a bnormal, o r t he t emperature s ensor c able i s broken.(1)The p arameters s pecific t o t he m otor a re n ot c orrectly. R efer t o"FANUC A C S PINDLE M OTOR i s eries P arameter M anual (B65280EN)," a nd c heck t he m otor-specific p arameters.(2)Cable i s f aulty. F eedback c able i s f aulty. R eplace t he c able. (3)Athermo s ensor i s f aulty. R eplace t he m otor (thermo s ensor).KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 07The m otor r otates a t a s peed e xceeding 115% (standard s etting) o f t he maximum a llowable s peed.(1)If t his a larm i s i ssued d uring s pindle s ynchronization I f o ne o f t hemotors o perating i n s pindle s ynchronization i s d eactivated (SFR o rSRV) a nd a ctivated a gain, t he s pindle m otor m ay a ccelerate t o i tsmaximum r otation s peed i n o rder t o e liminate t he p osition e rroraccumulated w hile t he m otor i s o ff, r esulting i n t his a larm b eingissued. M odify t he l adder i n s uch a w ay t hat t his s equence w ill n otbe u sed.(2)If t his a larm i s i ssued w hile t he m otor i s s topped(a)The c onnection c able o f t he s pindle s ensor i s f aulty.Check t hat t he c able o f t he s pindle s ensor l eading t o t hemotor i s i ntact. R eplace t he c able i f n ecessary.(b)The m otor i s v ibrating. R efer t o "FANUC A C S PINDLEMOTOR i s eries P arameter M anual (B-65280EN)," a ndadjust t he p arameters (4040 t o 4055 f or t he F S16i a nd 3040to 3055 f or t he F S15i) r elated t o t he v elocity l oop g ain.(c)The s pindle s ensor i s n ot a djusted c orrectly. A djust t hesensor.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 09The t emperature o f t he h eat s ink o f t he S PM m ain c ircuit h as r isen abnormally. T his a larm i s i ssued f or S PM-15i a nd l ater. W ith S PM-2.2i t o S PM 11i, h owever, a larm c ode 12 i s i ssued f or t he s ame c ause.(1) I f t his a larm i s i ssued d uring c utting (the h eat s ink t emperatureis h igh)(a) I f t his a larm i s i ssued w hen t he l oad m eter r eads a v aluebelow t he c ontinuous r ating o f t he a mplifier, c heck t hecooling s tate o f t he h eat s ink.<1> I f t he c ooling f an i s s topped, c heck t he p owersupply (connector C X1A/B). I f t he c ooling f an i s s tillinoperative, r eplace t he S PM w ith a n ew o ne.<2> W hen t he a mbient t emperature i s h igher t han t hespecified t emperature, l ower t he a mbient t emperatureto s atisfy t he s pecification.(b) W hen t his a larm i s i ssued b ecause t he l oad m eter r eadsa v alue a bove t he c ontinuous r ating o f t he a mplifier, i mprovethe u se m ethod.(c) W hen t he h eat s ink o n t he b ack o f t he a mplifier i s t oodirty, c lean t he h eat s ink, f or e xample, b y b lowing a ir.Consider t he u se o f a s tructure t hat p revents t he h eat s inkfrom b eing d irectly e xposed t o c oolant.(2) I f t his a larm i s i ssued u nder a l ight l oad (the h eat s inktemperature i s h igh)(a) W hen t he f requency o f a cceleration/deceleration i s t oohigh, m odify t he c utting c ondition s o t hat t he a verageincluding o utput a t a cceleration/deceleration d oes n otexceed t he c ontinuous r ating.(b) T he p arameters s pecific t o t he m otor a re n ot s etcorrectly. R efer t o "FANUC A C S PINDLE M OTOR i s eriesParameter M anual (B-65280EN)."KFAS: F anuc C NC P arts, S ervice, &R epair(3) I f t his a larm i s i ssued w hen t he h eat s ink t emperature i s l ow.Replace t he S PM.Alarm C ode 12An e xcessively l arge c urrent f lowed i nto t he D C l ink o f t he m ain c ircuit. W ith SPM-2.2i t o S PM-11i, t his a larm i ndicates t hat t he p ower m odule (IPM) o f t he main c ircuit d etected a n e rror s uch a s a n e xcessive l oad, o ver c urrent.(1) I f t his a larm i s i ssued o n S PM-2.2i t o S PM-11i C heck a larmcode 09 a s w ell.(2)If t his a larm i s i ssued i mmediately a fter a s pindle r otationcommand i s s pecified.(a)The m otor p ower l ead i s f aulty. C heck f or a s hort c ircuitbetween m otor p ower l eads a nd s hort-circuit t o g round, a ndreplace t he p ower l ead a s r equired.(b)The m otor w inding h as a n i nsulation f ailure. I f t he m otor i sshort-circuited t o g round, r eplace t he m otor.(c)The p arameters s pecific t o t he m otor a re n ot s et c orrectly.Refer t o "FANUC A C S PINDLE M OTOR i s eries P arameterManual (B-65280EN)," c heck t he m otor-specific p arameters.(d)The S PM i s f aulty. A p ower e lement (IGBT, I PM) m ay b edestroyed. R eplace t he S PM.(3)If t his a larm i s i ssued d uring s pindle r otation(a)A p ower e lement i s d estroyed. A p ower e lement (IGBT,IPM) m ay b e d estroyed. R eplace t he S PM. I f t he a mplifiersetting c ondition i s n ot s atisfied, o r c ooling i s i nsufficientbecause t he h eat s ink i s d irty, t he p ower e lements m ay b edestroyed. W hen t he h eat s ink o n t he b ack o f t he a mplifier i stoo d irty, c lean t he h eat s ink, f or e xample, b y b lowing a ir.Consider t he u se o f a s tructure t hat p revents t he h eat s inkfrom b eing d irectly e xposed t o c oolant. F or t he i nstallationcondition, r efer t o "FANUC S ERVO A MPLIFIER i s eriesDescriptions (B-65282EN)."KFAS: F anuc C NC P arts, S ervice, &R epair(b)The p arameters s pecific t o t he m otor a re n ot s et c orrectly.Refer t o "FANUC A C S PINDLE M OTOR i s eries P arameterManual (B-65280EN)," a nd c heck t he p arameters s pecific t othe m otor.(c)Speed s ensor s ignal e rror C heck t he s pindle s ensorsignal w aveform. I f a n e rror i s f ound, m ake a n a djustment o rreplace t he s ensor a s r equired.Alarm C ode 15In o utput s witching c ontrol o r s pindle s witching c ontrol, t he s witching operation s equence w as n ot e xecuted c orrectly. T his a larm i s i ssued i f o ne second o r m ore e lapses f rom t he t ransition o f a s witch r equest s ignal (SPSL o r RSL) u ntil a p ower l ead s tate c heck s ignal (MCFN, M FNHG, R CH, o r R CHHG) makes a t ransition.(1)Troubleshooting w hen t his a larm i s i ssued(a)The m agnetic c ontactor (switch u nit) f or p ower l eadswitching i s f aulty. I f t he c ontact i s i noperative, c heck t hepower s upply o f t he m agnetic c ontactor. I f t he m agneticcontactor i s s till i noperative, r eplace t he m agnetic c ontactor.(b)The I/O u nit o r w iring f or c hecking t he c ontact o f t hemagnetic c ontactor i s f aulty. I f a d efect i s f ound i n t he I/Ounit o r w iring, r eplace t he I/O u nit o r w iring.(c)The s equence (ladder) i s i ncorrect. M odify t he s equenceso t hat s witching i s c ompleted w ithin 1s econd.Alarm C ode 18A s um c heck i s a bnormal. I f t his a larm i s i ssued, r eplace t he S PM o r S PMcontrol p rinted-circuit b oard.Alarm C odes 19 a nd 20The o ffset v oltage o f t he p hase U(alarm c ode 19) o r p hase V(alarm c ode 20) c urrent d etection c ircuit i s e xcessively h igh. A c heck i s m ade w hen t he p ower is t urned o n. I f t his a larm i s i ssued, r eplace t he S PM. I f t his a larm i s i ssuedKFAS: F anuc C NC P arts, S ervice, &R epairimmediately a fter t he S PM c ontrol p rinted c ircuit b oard i s r eplaced, c heck t he plugging o f t he c onnectors b etween t he p ower u nit a nd S PM c ontrol p rinted circuit b oard.Alarm C ode 21The s pecified p olarity o f t he p osition s ensor i s i ncorrect. T roubleshooting when t his a larm i s i ssued(a)Check t he p osition s ensor p olarity p arameter (bit 4o f p arameterNo. 4001).(b)Check t he f eedback c able o f t he p osition s ensor.Alarm C ode 24The p ower t o t he C NC i s t urned o ff. (This s ymptom d oes n ot r epresent a n error.) S erial c ommunication d ata t ransferred b etween t he C NC a ndspindle a mplifier m odule c ontains a n e rror. T roubleshooting w hen t hisalarm i s i ssued(a)Noise o ccurring b etween t he C NC a nd s pindle a mplifier m odule(connected v ia a n e lectric c able) c aused a n e rror i n c ommunicationdata. C heck t he c ondition f or m aximum w iring l ength. R eferring t o"Connection," i n "FANUC S ERVO A MPLIFIER i s eriesDescriptions (B-65282EN)," c heck t he c ondition o f e lectric c ableconnection.(b)Noise e xercises a n i nfluence b ecause a c ommunication c able i sbundled w ith t he p ower l ead. I f a c ommunication c able i s b undledwith t he p ower l ead f or t he m otor, s eparate t hem f rom e ach o ther.(c)A c able i s f aulty. R eplace t he c able. I f a n o ptical I/O l ink a dapteris u sed, t he o ptical l ink a dapter o r o ptical c able m ay b e f aulty.(d)The S PM i s f aulty. R eplace t he S PM o r S PM c ontrol p rintedcircuit b oard.KFAS: F anuc C NC P arts, S ervice, &R epair(e)The C NC i s f aulty. R eplace t he b oard o r m odule r elated t o t heserial s pindle.Alarm C ode 27The s ignal o f t he p osition c oder i s d isconnected.(1)If t his a larm i s i ssued w hen t he m otor i s d eactivated(a)The s etting o f a p arameter i s i ncorrect. R efer t o "FANUCAC S PINDLE M OTOR i s eries P arameter M anual (B65280EN)," a nd c heck t he p arameter f or s ensor s etting.(b)The c able i s d isconnected. I f t he c onnection o f t hefeedback c able i s c orrect, r eplace t he c able.(c)The S PM i s f aulty. R eplace t he S PM o r S PM c ontrolprinted c ircuit b oard.(2)If t his a larm i s i ssued w hen t he c able i s m oved(a)The c onnector h as a b ad c ontact, o r t he c able i sdisconnected. T he c onductor m ay b e b roken. R eplace t hecable. I f c oolant h as p enetrated i nto t he c onnector, c leanthe c onnector.(3)If t his a larm i s i ssued w hen t he m otor r otates(a)The s hielding o f t he c able b etween t he s ensor a nd t heSPM i s f aulty. R eferring t o, "Connection," i n "FANUCSERVO A MPLIFIER i s eries D escriptions (B-65282EN),"check t he s hielding o f t he c able.(b)The s ignal c able i s b undled w ith t he s ervo m otor p owerlead. I f t he c able b etween t he s ensor a nd t he S PM i sbundled w ith t he s ervo m otor p ower l ead, s eparate t hemfrom e ach o ther.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 29An e xcessive l oad (standard s etting: l oad m eter r eading o f 9V) h as b een applied c ontinuously f or a c ertain p eriod (standard s etting: 30 s econds).(1)If t his a larm i s i ssued d uring c utting C heck t he l oad m eter, a ndreview t he c utting c ondition.(2)If t his a larm i s i ssued d uring a s top(a)The s pindle i s l ocked. C heck t he s equence t o s ee i f t hespindle i s l ocked w hen a c ommand f or v ery s low m ovementis s pecified o r o rientation i s s pecified f or t he s pindle.(3)If t he s pindle d oes n ot r otate a s s pecified (the s pindle r otates a ta v ery l ow s peed) a nd t his a larm i s i ssued(a)The s etting o f a p arameter i s i ncorrect. R efer t o "FANUCAC S PINDLE M OTOR i s eries P arameter M anual (B65280EN)," a nd c heck t he p arameter f or s ensor s etting.(b)The p hase s equence o f t he m otor p ower l ead i s i ncorrect.(c)The f eedback c able o f t he m otor h as a p roblem. C heck i fthe p hase A/B s ignals a re c onnected c orrectly.(d)The f eedback c able o f t he m otor i s f aulty. R otate t hemotor m anually t o s ee i f a s peed i s i ndicated i n t he i tem o fmotor s peed o n t he C NC d iagnosis s creen o r o n t he s pindlecheck b oard. I f n o s peed i ndication i s p rovided, r eplace t hecable o r s pindle s ensor (or m otor).(4)If t he s pindle d oes n ot r otate a s s pecified (the s pindle d oes n otrotate a t a ll) a nd t his a larm i s i ssued(a)The p ower l ead i s a bnormal. C heck i f t he m otor p owerlead i s c onnected n ormally. I f s pindle s witching o r o utputswitching i s p erformed, c heck i f t he m agnetic c ontactor i s o n.(b)The S PM i s f aulty. R eplace t he S PM.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 31The m otor f ailed t o r otate a s s pecified, a nd h as s topped o r i s r otating a t a very l ow s peed.(1)If t he m otor r otates a t a v ery l ow s peed a nd t his a larm i s i ssued(a)The s etting o f a p arameter i s i ncorrect. R efer t o "FANUCAC S PINDLE M OTOR i s eries P arameter M anual (B65280EN)," a nd c heck t he p arameter f or s ensor s etting.(b)The m otor p hase s equence i s i ncorrect. C heck i f t hemotor p hase s equence i s c orrect.(c)The f eedback c able o f t he m otor h as a p roblem. C heck i fthe p hase A/B s ignals a re c onnected c orrectly.(d)The f eedback c able o f t he m otor i s f aulty. R otate t hemotor m anually t o s ee i f a s peed i s i ndicated i n t he i tem o fmotor s peed o n t he C NC d iagnosis s creen o r o n t he s pindlecheck b oard. I f n o s peed i ndication i s p rovided, r eplace t hecable o r s pindle s ensor (or m otor).(2)If t he m otor d oes n ot r otate a t a ll a nd t his a larm i s i ssued(a)The s equence f or l ocking t he s pindle i s i ncorrect. C heckthe s equence t o s ee i f t he s pindle i s l ocked.(b)The p ower l ead i s f aulty. C heck i f t he p ower l ead i sconnected t o t he m otor c orrectly. I f s pindle s witching o rwinding s witching i s p erformed, c heck i f t he m agneticcontactor i s o n.(c)The S PM i s f aulty. R eplace t he S PM.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 32LSI m emory f or s erial c ommunication i s a bnormal. A c heck i s m ade w hen the p ower i s t urned o n. I f t his a larm i s i ssued, r eplace t he S PM o r S PM c ontrol printed c ircuit b oard.Alarm C ode 34Parameter d ata o utside t he s pecifiable r ange w as s et. T roubleshooting when t his a larm i s i ssued C onnect t he s pindle c heck b oard. T he s pindle c heck board d isplays "AL-34" a nd "F-xxx" a lternately. "F-xxx" i ndicates a p arameter number o utside t he s pecifiable r ange. F or t he c orrespondence b etween t he CNC p arameter n umbers a nd "F-xxx," r efer t o "FANUC A C S PINDLE M OTOR i series P arameter M anual (B-65280EN)."Alarm C ode 36The e rror c ounter o verflowed.(1)The s etting o f a p arameter i s i ncorrect.(a)The g ear r atio s et i n a p arameter i s i ncorrect. C heck i fan e xcessively l arge g ear r atio i s s et.(b)The s etting o f a p osition g ain i s i ncorrect. I f t he g ear r atiodata i s c orrect, i ncrease t he p osition g ain.Fanuc-15i P RM 3056 t o 3059Fanuc-16i/18i/21i P RM 4056 t o 4059Gear r atio b etween t he s pindle a nd m otorFanuc-15i P RM 3060 t o 3063Fanuc-16i/18i/21i P RM 4060 t o 4063Position g ain a t o rientationFanuc-15i P RM 3065 t o 3068Fanuc-16i/18i/21i P RM 4065 t o 4068Position g ain i n t he s ervo m ode/spindle s ynchronizationFanuc-15i P RM 3069 t o 3072Fanuc-16i/18i/21i P RM 4069 t o 4072KFAS: F anuc C NC P arts, S ervice, &R epairPosition g ain i n C s c ontour c ontrol(2)Sequence e rror(a)Check i f t he m otor i s d eactivated (by t urning o ffSFR/SRV) i n a p osition c ontrol m ode (rigid t apping, C scontour c ontrol, o r s pindle s ynchronization).Alarm C ode 37After e mergency s top s ignal i nput, t he m otor i s a ccelerated w ithout being d ecelerated. T his a larm i s i ssued a lso w hen t he m otor i s n otdeactivated (the m otor i s n ot d ecelerated c ompletely) w hen t heacceleration/deceleration t ime (initial p arameter s etting: 10 s econds) h aselapsed a fter e mergency s top s ignal i nput.Troubleshooting w hen t his a larm i s i ssued(a)The p arameter s etting o f t he s peed d etector i s i ncorrect.Referring t o C hapter 1i n "FANUC A C S PINDLE M OTOR iseries P arameter M anual (B-65280EN)," s et a c orrect t ime.(b)The p arameter s etting o f a n a cceleration/decelerationtime i s n ot p roper. C heck t he p arameter-set v alue a nd a ctualacceleration/ d eceleration t ime, t hen s et a n a ctualacceleration/deceleration t ime p lus s ome m argin.Fanuc-15i P RM 3082Fanuc-16i/18i/21i P RM 4082Acceleration/deceleration t ime s ettingAlarm C ode 41The p osition w here t he o ne-rotation s ignal o f t he p osition c oder i s generated i s i ncorrect.Troubleshooting w hen t his a larm i s i ssued(a)The s etting o f a p arameter i s i ncorrect. R efer t o "FANUC A CSPINDLE M OTOR i s eries P arameter M anual (B-65280EN)," a ndcheck t he p arameter f or s ensor s etting.KFAS: F anuc C NC P arts, S ervice, &R epair(b)The p osition c oder i s f aulty. C heck t he c heck p in P SD o n t hespindle c heck b oard. I f t he s ignal i s n ot g enerated p er r otation,replace t he p osition c oder.(c)The s hielding o f t he c able b etween t he s ensor a nd S PM i s f aulty.Referring t o "Connection," i n "FANUC S ERVO A MPLIFIER i s eriesDescriptions (B-65282EN)," c heck t he s hielding o f t he c able.(d)The s ignal c able i s b undled w ith t he s ervo m otor p ower l ead. I fthe c able b etween t he s ensor a nd S PM i s b undled w ith t he s ervomotor p ower l ead, s eparate t hem f rom e ach o ther.(e)The S PM i s f aulty. R eplace t he S PM o r S PM c ontrol p rintedcircuit b oard.Alarm C ode 42The o ne-rotation s ignal o f t he p osition c oder i s n ot g enerated.Troubleshooting w hen t his a larm i s i ssued(a)The s etting o f a p arameter i s i ncorrect. R efer t o "FANUC A CSPINDLE M OTOR i s eries P arameter M anual (B-65280EN)," a ndcheck t he p arameter f or s ensor s etting.(b)The p osition c oder i s f aulty. C heck t he c heck p in P SD o n t hespindle c heck b oard. I f t he s ignal i s n ot g enerated p er r otation,replace t he c onnection c able a nd p osition c oder.(c)The S PM i s f aulty. R eplace t he S PM o r S PM c ontrol p rintedcircuit b oard.Alarm C ode 46The o ne-rotation s ignal o f t he p osition c oder c annot b e d etected n ormally during t hread c utting.Troubleshoot a s i n t he c ase o f a larm c ode 41.KFAS: F anuc C NC P arts, S ervice, &R epairAlarm C ode 47The c ount v alue o f p osition c oder s ignal p ulses i s a bnormal. P hases A a nd B for t he p osition c oder h ave a f eedback p ulse c ount o f 4096 p/rev p er s pindle rotation. T he S PM c hecks t he p ulse c ounts o f p hases A a nd B e quivalent t o t he position c oder e ach t ime a o ne-rotation s ignal i s g enerated. T he a larm i s i ssued when a p ulse c ount b eyond t he s pecified r ange i s d etected.(1)If t his a larm i s i ssued w hen t he c able i s m oved (as i n t he c ase w herethe s pindle m oves) T he c onductor m ay b e b roken. R eplace t he c able. I fcoolant h as p enetrated i nto t he c onnector, c lean t he c onnector.(2)Troubleshooting i n o ther c ases(a)The s etting o f a p arameter i s i ncorrect. R efer t o "FANUC A CSPINDLE M OTOR i s eries P arameter M anual (B-65280EN)," a ndcheck t he p arameter f or s ensor s etting.(b)The s hielding o f t he c able b etween t he s ensor a nd S PM i s f aulty.Referring t o "Connection," i n "FANUC S ERVO A MPLIFIER i s eriesDescriptions (B-65282EN)," c heck t he s hielding o f t he c able.(c)The s ignal c able i s b undled w ith t he s ervo m otor p ower l ead. I fthe c able b etween t he s ensor a nd S PM i s b undled w ith t he s ervomotor p ower l ead, s eparate t hem f rom e ach o ther.(d)The S PM i s f aulty. R eplace t he S PM o r S PM c ontrol p rintedcircuit b oard.Alarm C ode 50A v alue o btained b y i nternal c alculation i n s pindle s ynchronization exceeded t he a llowable r ange.Troubleshooting w hen t his a larm i s i ssued(a)The s etting o f p arameters f or g ear r atio s etting i s i ncorrect.Check i f a n e xcessively l arge g ear r atio i s s et.(b)Position g ain s etting l imit I f c orrect g ear r atio d ata i s s et,increase t he p osition g ain v alue i n s pindle s ynchronization.Fanuc-15i P RM 3056 t o 3059Fanuc-16i/18i/21i P RM 4056 t o 4059KFAS: F anuc C NC P arts, S ervice, &R epairGear r atio b etween t he s pindle a nd m otorFanuc-15i P RM 3065 t o 3068Fanuc-16i/18i/21i P RM 4065 t o 4068Position g ain i n t he s ervo m ode/spindle s ynchronizationAlarm C odes 52 a nd 53The s ynchronization s ignal (ITP) i n c ommunication d ata t ransferred t o a nd from t he C NC s topped.Troubleshooting w hen t his a larm i s i ssued(a)The S PM i s f aulty. R eplace t he S PM o r S PM c ontrol p rinted c ircuitboard.(b)The C NC i s f aulty. R eplace t he b oard o r m odule r elated t o t he s erialspindle.Alarm C ode 54A l arge c urrent f lowing i n t he m otor f or a l ong t ime w as d etected.Troubleshoot a s i n t he c ase o f a larm c ode 29.Alarm C ode 55In s pindle s witching c ontrol o r o utput s witching c ontrol, a m ismatch between t he s witching r equest s ignal (SPSL o r R SL) a nd t he p ower l ead s tate check s ignal (MCFN, M FNHG, R CH, o r R CHHG) c ontinues d uring m otor activation.Troubleshooting w hen t his a larm i s i ssued(a)The m agnetic c ontactor (switch u nit) f or p ower l ead s witching i sfaulty. I f t he c ontact i s i noperative, c heck t he p ower s upply o f t hemagnetic c ontactor. I f t he m agnetic c ontactor i s s till i noperative,replace t he m agnetic c ontactor.(b)The I/O u nit o r w iring f or c hecking t he c ontact o f t he m agneticcontactor i s f aulty. I f a d efect i s f ound i n t he I/O u nit o r w iring,。
FANUC外部轴添加手册(弧焊篇)
SHANGHAI-FANUCFANUC 外部轴添加手册弧焊篇目录第一章:概述﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 1 第二章:硬件﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2 2.1.光纤套件﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2 2.2.伺服放大器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2 2.3.连接电缆﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 3 2.4.伺服电机﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 4 2.5.抱闸单元﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 4 2.6.电池单元﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 5 第三章:硬件连接及设置﹒﹒﹒﹒﹒﹒﹒﹒ 6 3.1.光纤的连结及FSSB 的设置﹒﹒﹒﹒ 6 3.2.放大器的连接及编号的设置﹒﹒﹒﹒ 63.3.起始轴号的设置﹒﹒﹒﹒﹒﹒﹒﹒﹒74.4.抱闸号的设置﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒8 第四章:软件﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒9 第五章:添加案例:﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒105.1 单机+ 一轴变位机﹒﹒﹒﹒﹒﹒﹒﹒10 5.2 单机+ 直线导轨+两轴L 型变位机﹒﹒22 5.3 双机+ 一轴定位+两轴变位机﹒﹒﹒44 附一:常见的故障现象﹒﹒﹒﹒﹒﹒﹒﹒﹒53 附二:电机型号列表﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒54 附三:放大器型号列表﹒﹒﹒﹒﹒﹒﹒﹒﹒56 附四:放大器与电机匹配表﹒﹒﹒﹒﹒﹒﹒56 附五:电机与连接电缆匹配表﹒﹒﹒﹒﹒﹒57第一章:概述“FANUC 外部轴添加手册”是上海发那科就外部轴的添加而编写的一本手册,该手册适用于R30i A 及以上的控制柜类型。
手册的内容包括添加外部轴整套硬件的介绍,连接及其设置,软件的介绍、添加案例。
在使用发那科机器人之前,务必仔细阅读发那科机器人安全手册,并在理解该内容的基础上使用机器人。
在使用“FANUC 外部轴添加手册”时,操作者必须接受发那科专业的技术培训。
该手册为上海发那科内部资料,仅为内部技术人员方便学习交流,请勿外泄第二章:硬件在添加附添加过程中,需要追加以下硬件:光纤、伺服放大器、连接电缆、伺服电机、抱闸单元,电池单元:2.1 光纤光纤作为信息传输的介质,由纤芯和包层组成,由于光纤质地脆,易断裂,所以在使用过程中要加以注意,可以弯曲,但禁止折弯。
FANUC伺服滑台的配置

一、 断电启动,PREV+NEXT,选择 3.control start,按MENUS 选择9.MAINTENANCE,确定,显示Setup Robot system Variables界面,Group Robot Library/Option Ext Axes1 R-2000iB/210F 0Extended Axis Control选择Extended Axis Control,按F4 MANUL开始配置1.---SELECT GROUP---0. EXIT1.Group 1选择1.Group2.--Handwear start axis setting--Enter hardware start axis(Valid range:1-16)Default value =7回车3. E1 E2 E3***Group 1 Total Ext Axis = * * *1.Display/Modify Ext axis1-32.Add Ext axis3.Delete Ext axis4.Exit选择2,接下来出现Enter axis to add (1-3)?输入1, 回车4.---MOTOR SELECTION---1.Standard Methed2.Enhanced Methed3.Direct Entry Method1选择15.---MOTOR SIZE (alpha is) ---输入0, 显示下一页中选择相应的电机型号106. aiF30, 输入1066. ---MOTOR TYPE ---输入2. “2./3000”,回车7.---CURRENT LIMIT FOR MOTOR---12. 160A输入12.(来自驱动器)8.---EXTENDED AXIS TYPE---1.Integrated Rail (Linear axis) 整体的,集成的2.Integrated Arm (Rotary axis)3.Auxiliary Linear Axis 辅助的4.Auxiliary Rotary Axis选择1选择后,显示Direction 1:X 2:Y 3:ZEnter Direction(1-3)?Select?输入2.9.---GEAR RATIO---Enter Gear Ratio?输入1110.---MAX JOINT SPEED SETTING--- Suggested Speed = 550.000(mm / s)Enter (1.Change 2.No Change)默认为550mm/s ,根据实际输入11.---MOTOR DIRECTION---Ext_axs 1 Motion Sign = FALSEEnter (1:TRUE , 2:FALSE)?输入112.---UPPER LIMIT---Enter Upper Limit (mm)?输入一个上限值13. ---LOWER LIMIT---Enter Lower Limit (mm)?输入014.---MASTER POSITION---Enter Master Position(mm)?输入015.---ACC/DEC TIME--- 设定加减速时间常数Default acc_time1=256 (ms)Default acc_time2=128 (ms)以上默认。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
B-65395CM/01
为了安全使用
为了安Байду номын сангаас使用
为了使您更安全的使用本公司的伺服电机、以及伺服放大器(βiSVM),本公司 已将相应的注意事项写入“为了安全使用”中。请在使用电机及放大器之前,仔 细阅读“为了安全使用”。 另外,有关电机或放大器的各项功能,请参阅本篇,并在完全理解的基础上正确 使用。 还有,对于“为了安全使用”中没有记录的事项,原则上是禁止操作的。有关此 方面的事项请在操作前预先与本公司进行联系。
1.3.1.1 警告 ............................................................................................ s-8 1.3.1.2 注意 ............................................................................................ s-9 1.3.1.3 注释 .......................................................................................... s-10 1.3.2 试运行时的警告及注意................................................................. s-11 1.3.2.1 警告 .......................................................................................... s-11 1.3.2.2 注意 .......................................................................................... s-12 1.3.3 维护时的警告及注意..................................................................... s-13 1.3.3.1 警告 .......................................................................................... s-13 1.3.3.2 注意 .......................................................................................... s-14 1.3.3.3 注释 .......................................................................................... s-14
FANUC SERVO AMPLIF IER #* series
I/O Link Option
维修说明书
B-65395CM/01
·本说明书的任何内容不得以任何方式复制。 ·所有参数指标和设计可随时修改,恕不另行通知。
我们试图在本说明书中叙述尽可能多的情况。 然而,要在本说明书中全都注明不能这样做或者那样做,则需要占用说明书的大量篇幅,所 以本说明书中没有一一列举。 因此,对于那些在说明书中没有叙述的情况,可以视为“不可能”的情况。
目录 1.1 警告、注意和注释 ............................................................................................ s-2 1.2 FANUC AC SERVO MOTOR βis series........................................................... s-3
警告 适用于:如果错误操作,则有可能导致操作人员死亡或受重伤。
注意 适用于:如果错误操作,则有可能导致操作人员受轻伤或者损坏设备。
注释 指出除警告和注意以外的补充说明。
※ 请仔细阅读本说明书,并加以妥善保管。
s-2
B-65395CM/01
1.2
1.2.1
FANUC AC SERVO MOTOR βis series 警告
s-1
为了安全使用
1.1
警告、注意和注释
B-65395CM/01
“为了安全使用”,保证操作人员人身安全以及防止机床损坏,文中叙述了有关 安全的注意事项。根据它们在安全方面的重要程度,在正文中以“警告”和“注 意”来叙述。 有关的补充说明以“注释”来叙述。 在使用之前,必须熟读这些“警告”、“注意”和“注释”中所叙述的事项。