会飞的高清摄像机 派诺特推出新一代遥控四轴飞行器AR.Drone 2.0
派诺特全新遥控机搭载FullHD高清摄像头让您尽享天空美景-Parrot

视频 •• "Fisheye" 180° 1/2,3" 透镜摄像头:
6 倍光学变焦,1400 万像素传感器 •• 视频稳定功能:3轴式数码处理 •• 视频分辨率:1920 x 1080p (30fps) •• 照片分辨率:3800 x 3188 •• 视频编码:H264 •• 照片格式:RAW, DNG •• 内存:8G 闪存 •• 扩展功能:USB
网络连接 •• Wi-Fi 802.11a/b/g/n/ac •• WIFI 天线:2套陶瓷天线可利用 MIMO
技术获取 2.4 和 5 GHz(图7)双频信号 •• 发射功率:最大 21 dBm •• 信号范围:最远 300 米
结构 •• 4台外转式无刷马达 •• 玻璃纤维(15%)强化 ABS 工程塑料 •• EPP 底座(视室内或室外飞行状况可轻松
FreeFlight 3 App Bebop Drone 遥控飞机所搭配的操 控应用程序可免费在智能手机和平板 电脑上免费使用。Freeflight 3 程序 适用于 iOS 和 Android 系统。
2014 年末可兼容 Windows 8.1 系统
September 2014 - Conception and realisation : Parrot® Brand Studio
Parrot Bebop Drone 遥控飞机带有 2 根 WIFI 天线,可在 MIMO 多输入 多输出模式下处理 2.4 GHz 和 5 GHz 两种频率。 它可以自动生成最新标准的 Wi-FI 802.11 网络。 当网络连接不畅 时,您便可以手动选择频率。
180°方位视频摄录
FreeFlight 3 免费应用
canon eos 450d 数位相机 说明书
目錄目錄目錄操作注意事項快速入門指南部件名稱部件名稱)部件名稱部件名稱部件名稱部件名稱為電池充電開啟電源32 3剩餘可拍攝數量安裝及移除鏡頭基本操作選單操作及設定1234561 23格式化記憶卡如下所示顯示選單螢幕或影像時,半按快門按鈕,您即可立即返回拍攝設定螢幕(左圖所示)。
按下<B>按鈕開啟或關閉螢幕。
當您戴太陽鏡注視觀景器時按下<B>按鈕關閉螢幕。
如靠近光管,液晶螢幕可能會自動關閉。
如發生這種情況,請避免靠近光關於自動亮度優化在基本拍攝區模式中,會啟用自動亮度優化以自動調整影像,從而獲得最佳亮度及對比度。
在創意拍攝區模式中亦會預設設定自動亮度優視乎場景而定,將主體向左或向右移動以平衡背景並獲得更好的視角。
模式下,半按快門按鈕對靜止主體對焦時然後完全按下快門按鈕拍攝相片。
對焦鎖定也可在其他基本拍攝區模式中使用(<5>運動除外拍攝竅門主體距離背景越遠越好。
主體距離背景越遠,背景看起來就會越模糊。
在簡單、深色的背景前,也可更突出主體。
使用遠攝鏡頭。
如有變焦鏡頭,請使用遠攝端使主體上半身覆蓋整個畫面。
必要時,拍攝竅門使用簡單背景。
簡單背景可使花朵等更加突出。
盡量靠近主體。
檢查鏡頭的最近對焦距離。
某些鏡頭上有<40.25m/0.8ft頭最近對焦距離是從相機上的<V> (焦平面)標記至主體的距離拍攝竅門使用遠攝鏡頭。
建議使用遠攝鏡頭,以便您從遠處拍攝。
使用中央自動對焦點進行對焦。
將中央自動對焦點覆蓋拍攝主體,然後半按快門按鈕進行對焦。
自動對焦時,相機會持續發出輕微的提示音。
如無法對焦,觀景器中的對。
飞行器本科毕业论文选题(1299个)
飞⾏器本科毕业论⽂选题(1299个)毕业论⽂(设计)题⽬学院学院专业学⽣姓名学号年级级指导教师毕业教务处制表毕业⼆〇⼀五毕业年⼗⼆⽉毕业⼀⽇飞⾏器与毕业论⽂选题(1299个)⼀、论⽂说明本写作团队致⼒于毕业论⽂写作与辅导服务,精通前沿理论研究、仿真编程、数据图表制作,专业本科论⽂300起,具体可以联系⼆、论⽂参考题⽬《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养“中航⼯业杯”⽆⼈飞⾏器Yuneec Q500航拍⼀体飞⾏器Zano微型航拍四轴飞⾏器航天战术飞⾏器质量管理信息系统分析设计智能测污飞⾏器安卓⼿机遥控电动A4纸折微型飞⾏器总体设计为飞⾏器摄影⽽⽣:空中摄影附件⼤⽐拼浅谈⼩型低速航空飞⾏器造型美学基于DSP的多轴⽆⼈飞⾏器设计亚拓M690L多轴飞⾏器浅析电动多旋翼飞⾏器的设计及其在农业领域中的应⽤⼀种⾼级飞⾏器测试数据时域判读⽅法⾼超声速飞⾏器上升段轨迹优化了不起的飞⾏器微型飞⾏器的⼩幅运动⽓动⼒建模研究六旋翼飞⾏器容错控制算法我最喜欢的玩具——愤怒的⼩鸟发光感应飞⾏器折叠式飞⾏器机翼展开装置的技术研究⾼超⾳速飞⾏器⽓动热研究进展新型四旋翼飞⾏器设计与制作某型海⾯飞⾏器⽤阀门断裂原因的失效分析另类“单⼈飞⾏器”⽆⼈旋翼飞⾏器⾃适应飞⾏控制系统设计多功能探测智能四轴飞⾏器的研制分析亚拓M480L多轴飞⾏器基于⽆⼈飞⾏器和GIS的防汛抗旱监测系统基于ANSYS的四轴飞⾏器机架振动分析四旋翼飞⾏器多传感器硬件的电路设计基于PID神经⽹络的四旋翼飞⾏器控制系统研究输电线路精细化故障查找飞⾏器研制及应⽤⼩型四轴飞⾏器控制器设计的研究校园空中监管四轴飞⾏器的设计动⼿做⽓球飞⾏器新型涵道⽆⼈飞⾏器飞⾏控制策略研究基于四轴飞⾏器的PID姿态控制系统基于X—Bee和STM32F407的四轴飞⾏器设计基于飞⾏器的复杂零件⾃动加⼯及组装技术的研究飞⾏器坠海咋打捞?四旋翼飞⾏器飞⾏轨迹的仿真研究视觉导航的四轴飞⾏器控制系统设计农⽤⽆⼈遥控飞⾏器优势和效益分析可续航三栖探测飞⾏器系统设计与实现基于DSP的四旋翼⽆⼈飞⾏器控制系统基于WIFI的智能多功能微型四旋翼飞⾏器设计四轴飞⾏器的姿态研究与设计基于ARM的⼀种⽆⼈航拍旋翼飞⾏器设计“空中牧⽺⽝”让飞⾏器竞赛更具挑战与趣味性⼀种垂直起降飞⾏器四旋翼飞⾏器的设计与仿真分析北京航天长征飞⾏器研究所“图像去模糊技术”国际领先扑翼式飞⾏器的发展与展望飞⾏器健康监控的概念及其发展飞翔的歌利亚:超级飞⾏器狂想⾼超声速飞⾏器建模研究基于分布估计算法的弹性飞翼飞⾏器多操纵⾯控制分配基于Multiwii的开源四轴飞⾏器⼀种新型⽆⼈机⼩型化飞⾏器管理计算机的设计实现美空军科学咨询委员会评估⾼超声速飞⾏器技术成熟度基于OPC技术的飞⾏器测试与控制系统设计Mil—1394b总线在飞⾏器管理系统中的典型应⽤分析飞⾏器供电系统最⼤功率跟踪与测试技术研究微型飞⾏器悬臂谐振分析⾼空长航时飞⾏器⾃主导航系统研究及试验验证电动多旋翼飞⾏器的特点及其在农业中的应⽤带魔⼒的球球飞⾏器⽤KT板制作四轴飞⾏器机架的可⾏性电⼒巡线⽤四旋翼飞⾏器软硬件设计地效飞⾏器的发展及其军事应⽤⾃动航⾏飞⾏器设计变结构飞⾏器的故障诊断与容错控制盘点全球⼋⼤奇葩飞⾏器从中国⾼超声速导弹试验谈亚轨道飞⾏器⼀种警⽤可折叠六旋翼飞⾏器设计漫谈多轴飞⾏器的操纵⽅式基于Fluent的飞⾏器⽓动参数计算⽅法基于STM32单⽚机的三叶浆四旋翼飞⾏器设计四轴飞⾏器仿真系统设计滑翔飞⾏器威胁区规避算法研究魔⽅型深空探测飞⾏器未来变体⽆⼈飞⾏器的关键技术太空飞⾏器的空⽓动⼒学数据新型飞⾏器航空飞⾏器的结冰与防冰四旋翼飞⾏器控制系统设计基于⼿机WIFI通信的空中探测飞⾏器研制基于GPS及光流传感器的四旋翼飞⾏器四翼飞⾏器⽤于紧急运输的⽹络设计低空探测飞⾏器的改装及其在现代⽓象服务中的应⽤四旋翼飞⾏器增稳混合控制器求破解之法⾼超声速飞⾏器的拦截和防御基于⼴义逆矩阵求解的空间飞⾏器的定位7旬⽼⼈欲研制出⽆动⼒飞⾏器微型旋翼飞⾏器的现状分析和发展趋势初探英国⼈设计“怪物”飞⾏器结合飞艇、飞机、直升机的世界最长飞⾏器基于PIV原理的微型扑翼飞⾏器流场试验台遥控飞⾏器航拍在建设⼯程中的应⽤基于Mahony滤波器和PID控制器的四旋翼飞⾏器姿态控制飞⾏器制造⼯程专业教学⽅法改⾰模式研究⾼超声速飞⾏器的滑模预测控制⽅法⾼超⾳速飞⾏器引领空天武器新趋势飞⾏器⾥的好⼩伙多学科设计优化算法及其在飞⾏器设计中应⽤太阳帆飞⾏器⾃适应极点配置控制⽅法研究低空飞⾏器即时航迹评估⽅法及模型⾼空飞⾏器供油驱动系统IGBT模块结温特性研究综合化飞⾏器管理计算机技术研究虚拟制造技术在飞⾏器设计中的应⽤⽆⼈机飞⾏器通信链路抗⼲扰性能⽐较研究四旋翼⾃主飞⾏器系统发展中的飞⾏器射频隐⾝技术⼈造昆⾍——微型飞⾏器飞⾏器:作为艺术的喷⽓机飞⾏器设计的多参数决策matlab的模拟实现马丁飞⾏器宫崎骏关键词:少⼥,森林,飞⾏器四旋翼⾃主飞⾏器私⼈航天飞⾏器各显神通传说中的磁单极飞⾏器基于FPGA的⽆⼈飞⾏器温度巡检装置的设计蜂窝与太空飞⾏器地效飞⾏器周围流体场数值模拟国外⾼校浮空飞⾏器学⽣创新实践活动的发展与启⽰飞⾏器⼤型薄壁件制造的柔性⼯装技术临近空间⾼超声速飞⾏器建模与控制研究进展⾼速飞⾏器直接⼒/⽓动⼒复合控制技术综述多旋翼飞⾏器在输电线路巡维的应⽤飞⾏器⽼牌电⽓公司的飞⾏器德国西门⼦-舒克特SSW D.III/D.IV战⽃机关于脑电波控制飞⾏器的研究现状概述基于粒⼦群算法的再⼊式飞⾏器再⼊⾛廊计算⽅法研究⼀种飞⾏器测控电源的实时监测装置设计与实现⾼超⾳速飞⾏器呼之欲出基于科研资源向教学资源转化的飞⾏器结构⼒学的本科教育研究与实践飞⾏器吸⽓式⾼超声速飞⾏器纵向运动反演控制器设计四轴飞⾏器⽆刷直流电机驱动技术研究康达效应飞⾏器研究及应⽤飞⾏器的那些事SINS/CNS组合导航对⾼空飞⾏器再⼊精度的影响有输⼊饱和的⽋驱动VTOL飞⾏器滑模控制飞⾏器跳“龙门”临近空间飞⾏器发展概况外星飞⾏器没有来!俄研制新型地效飞⾏器“驭波者”来袭美国空军X—51A⾼超⾳速飞⾏器试验成功基于改进互补滤波器的低成本微⼩飞⾏器姿态估计⽅法基于⽆线传感器⽹络的飞⾏器结构健康监测系统的关键技术研究与应⽤某飞⾏器温度遥测参数异常分析对四轴飞⾏器的姿态控制器的设计与仿真⼗⼤即将实现的未来飞⾏器做⼀架⽓垫飞⾏器贴地飞⾏器再⽣源于SAAB的灵魂战车—北汽绅宝柔性与刚性机翼微型飞⾏器⽓动特性差异研究动基座飞⾏器故障弹道仿真飞⾏器三维轨迹动态显⽰系统的设计基于Matlab/Simulink的飞⾏器全数字仿真平台的设计基于测向阵列的空中飞⾏器瞬时⽆源定位完美主义飞⾏器未来飞⾏器未来飞⾏器微探飞⾏器电⼒巡检欧洲航天局透露“⾼速试验飞⾏器”计划细节⾃主学习教学⽅法在“飞⾏器⾃主导航”课程中的应⽤体会发展中的飞⾏器射频隐⾝技术“创新杯”第五届全国未来飞⾏器设计⼤赛获奖作品选登ADS—B飞⾏器航迹监视的三维可视化探讨世界上最⼩的亚轨道载⼈飞⾏器四旋翼⽆⼈飞⾏器混合控制系统研究神奇的意念遥控飞⾏器“创新杯”第五届全国未来飞⾏器设计⼤赛颁奖仪式在珠海召开天津滨海⾼新区特种飞⾏器研发基地⼆期开⼯超⾼速飞⾏器可数⼩时飞越太平洋等选择哪些飞⾏器航拍?雷震⼦与⼩型飞⾏器⼀起来做四轴飞⾏器(下)基于四杆机构对仿⽣蜻蜓扑翼飞⾏器的设计优化与仿真近空间飞⾏器故障诊断与容错控制的研究进展基于QFT的四旋翼飞⾏器飞⾏控制算法研究美国飞⾏器图形⼀起来做四轴飞⾏器(上)微型飞⾏器像昆⾍那样飞⾮常规布局的斜掠翼飞⾏器微型飞⾏器像昆⾍那样飞⾼超声速飞⾏器参数化⼏何建模⽅法与外形优化X基于单⽬视觉的室内微型飞⾏器位姿估计与环境构建“飞航杯”全国⾸届未来飞⾏器设计⼤赛揭晓明天,乘什么样的飞⾏器去旅⾏临近空间环境对临近空间飞⾏器的影响乘波者飞⾏器,⼀⼩时打击全球随⼼所欲飞⾏器⽔上飞⾏器做椭圆运动的飞⾏器近地点速度范围的浅显证明从天宫⼀号的发射看飞⾏器的空间交会对接使⽤GPS传感器的飞⾏器⾃动抛物系统设计扇翼飞⾏器模型的设计与制作Vega环境下的某飞⾏器视景仿真的实现教你调试单轴飞⾏器四旋翼微型飞⾏器设计⽇本⾼超声速飞⾏器技术发展解析基于DSP的发射控制系统在提⾼飞⾏器发射精度中的应⽤TYPE 20飞⾏器腕表碟影重重探秘国外圆盘形飞⾏器飞⾏器发展史遥控飞⾏器与摄像机——派诺特AR.Drone 2.0“天宫⼀号”飞⾏器发射的地理⾓度分析关于四轴飞⾏器的姿态动⼒学建模飞⾏器飞⾏⼯况视频监测及图像处理“航天创意杯”新概念飞⾏器创新⼤赛落下帷幕“猎户座”嬗变:从乘员探测飞⾏器到多⽤途载⼈飞船⼀款“KK”板单轴飞⾏器亚特兰蒂斯的飞⾏器飞⾏器制造⼯程专业实践教学体系完善研究通古斯之谜⼜有新说祸⾸疑是天外飞⾏器视频跟踪四旋翼飞⾏器创新实验系统明天,乘什么样的飞⾏器去旅⾏对“天宫⼀号”⽬标飞⾏器发射成功的多⾓度思考基于DE算法的再⼊飞⾏器横向机动能⼒研究基于改进粒⼦群算法的再⼊飞⾏器轨迹优化基于BP⽹络的飞⾏器解耦设计美披露外⼤⽓层杀伤飞⾏器陆基拦截试验失败原因飞⾏器机翼布局对雷达隐⾝性能影响探讨⼀种新飞⾏器的设想Evolution of Aircrafts飞⾏器发展史未来50年的概念飞⾏器直升机/喷⽓机混合飞⾏器⾸届中航⼯业杯——国际⽆⼈飞⾏器创新⼤奖赛闭幕天宫⼀号⽬标飞⾏器发射升空后准确进⼊预定轨道绿⾊飞⾏器的梦想与现实乘着⽉亮的飞⾏器中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办晶体硅电池在太阳能飞⾏器上的选择与应⽤(下)“KK”飞控板系列飞⾏器的制作基于⾃适应逆的微型飞⾏器飞⾏控制系统美研制微型飞⾏器晶体硅电池在太阳能飞⾏器上的选择与应⽤晶体硅电池在太阳能飞⾏器上的选择与应⽤(上)探索近空飞⾏器创新永不⽌步飞⾏器专业开设基于多知识点的综合性\设计性实验的研究⼈类最早的飞⾏器《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养⾃转旋翼/机翼组合构型飞⾏器飞⾏动⼒学特性旋翼飞⾏器飞⾏动⼒学系统辨识建模算法飞⾏器等离⼦体隐⾝技术及研究现状飞⾏器的翅膀美国轨道试验飞⾏器X-37B⽇内⽡国际车展飞⾏器的化妆舞会基于MATLAB的⽆⼈飞⾏器两点交会定位算法研究基于TVARMA的飞⾏器结构响应序列参数谱估计“天宫⼀号”⽬标飞⾏器的搭载⽅案评审结果揭晓中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办美国公布⾼超声速试验飞⾏器试飞失败原因Draganfly四旋翼微型飞⾏器⾯向分级设计优化的飞⾏器参数化建模⽅法未来太空飞⾏器⼤曝光玛雅⽯板上的宇宙飞⾏器之谜X-37B“轨道试验飞⾏器1号”美国X系列飞⾏器(四)垂直极限的挑战⼀种飞⾏器综合健康管理系统决策⽀持层的设计⽅法飞⾏器⼤振幅运动实验与⽓动⼒建模飞⾏器隐⾝技术现状及其未来发展趋势个⼈飞⾏器显⾝⼿研制超微型飞⾏器成世界新趋势⽹络中⼼战的空中多⾯⼿:⽆⼈飞⾏器⼩波变换在飞⾏器遥测数据分析中的应⽤全⾃动航测测量系统MAP-Ver 在⽆⼈飞⾏器低空航摄数据处理中的应⽤飞⾏器板结构中Lamb波解析建模研究“怪物”飞⾏器上班族的飞⾏器美国X性系列飞⾏器⼀开启空间战争新时代?难以证实的古代宇宙飞⾏器之谜未来的飞⾏器数学专业:飞⾏器环境与⽣命保障⼯程考虑迟滞⾮线性的⾼超声速飞⾏器颤振分析伞翼飞⾏器折叠式飞⾏器等多⼯况下⾼超声速飞⾏器再⼊时流场的计算新型电⼒飞⾏器“帕分”等2则彩笔“飞⾏器”通⽤再⼊飞⾏器空间作战飞⾏器⽔动⼒穿戴式飞⾏器⾛近轻型运动飞⾏器“磁悬浮”:零⾼度飞⾏器飞⾏器电⽓接⼝⾃动测试系统设计关于飞⾏器振动仿真模拟的分析飞⾏器仪器舱混响室声环境实验研究和数值模拟折叠式飞⾏器·GPS定位鞋等超轻型飞⾏器的设计制作和试飞倾转双涵道风扇单⼈垂直起降飞⾏器抗震救灾的飞⾏器基于有限状态机的飞⾏器⾃毁系统时序控制设计近空间飞⾏器及其关键材料临近空间飞⾏器⾼超声速飞⾏器多约束参考轨迹快速规划算法基于CMAC⽹络的飞⾏器再⼊标准轨道制导基于INA-QFT的⾼超声速飞⾏器鲁棒控制器设计飞翼式飞⾏器结构布局与构件尺⼨的两级优化近空间飞⾏器的DSF:vsat鲁棒快速Terminal滑模控制⼗⼤杰出飞⾏器太空飞⾏器如何调控温度(下篇)UFO飞⾏器即将上市和飞⾏器相关的专业有哪些等太空飞⾏器如何调控温度(上篇)宇宙飞⾏器上带的电⼦脑袋新型飞⾏器飞⾏器的电磁⼒制动亚轨道飞⾏器返回段动⼒学虚拟样机设计⼤⽩丁博⼠的助⼒飞⾏器基于wince的飞⾏器姿态采集系统的设计与实现灵巧型军民通⽤交通⼯具——飞⾏家三栖飞⾏器基于遗传算法的飞⾏器路径规划研究临近空间和临近空间飞⾏器扑翼微型飞⾏器⾮线性H∞姿态控制飞⾏器虚拟现实仿真研究中国研制成功形似“UFO”的实⽤飞⾏器等⾼超声速飞⾏器的⽓动外形飞⾏器系统级可测试性设计⽅法研究“创新”杯第⼆届全国未来飞⾏器设计⼤赛专业⼆等奖作品(⼆)欧洲第⼀艘“⾃动转移飞⾏器”发射升空等完美世界飞⾏器再绎⾃由新梦想私享者的飞⾏器临近空间飞⾏器的种类及军事应⽤⽔上飞机、地效飞⾏器与冲翼艇辨析⾃主飞⾏器向苍蝇看齐东梦岛——奇奇的飞⾏器电⼦⼲扰对低可观测飞⾏器飞⾏路径规划的影响国内外微型飞⾏器研究现状及技术特点⼟⾖·⽜仔·总统⼭·柑橘·飞⾏器·⼤瀑布美国临近空间飞⾏器技术发展概述从“飞⾏器”谈起的“科学”飞⾏器的“摇篮”新型飞⾏器造艘飞⾏器去参赛⽇本准备进⾏升⼒体再⼊飞⾏器试验昆⾍飞⾏器飞⾏器造型⼤⽐拼飞⾏器的“原动⼒”飞⾏器在直⾓坐标系中定位⽅法研究飞⾏器助推段振动环境分析近空间飞⾏器成为各国近期研究的热点(下)近空间飞⾏器成为各国近期研究的热点(上)飞⾏器的奥秘应⽤于微型飞⾏器阵列天线的⾃适应波束形成器苍蝇飞⾏器正“瘦⾝”训练⾼超声速飞⾏器滑⾏航迹优化飞⾏器RCS计算前置处理中裁剪曲⾯剖分算法⾼超声速飞⾏器BTT⾮线性控制器设计与仿真基于MAS的空天飞⾏器⾃主控制系统设计⾼超⾳速飞⾏器头罩⽓动热流场数值模拟微型仿⽣扑翼飞⾏器的尺度效应分析美国航宇局探索体系和“机组探索飞⾏器”问答追逐飞⾏器的龟壳911TurBo不⼀样的新兵:美国研制“临近空间”飞⾏器“⼩鹰”号地效飞⾏器飞⾏器发动机的分类及⼯作原理⼀种翼⾝融合体飞⾏器外形的RCS计算与实验发明载⼈飞⾏器的应是中国⼈某RLV飞⾏器投放轨迹的设计与分析⾼空⾼速⽆⼈飞⾏器热控制系统设计碟形飞⾏器发展现状及其关键技术世爵:陆地飞⾏器⾼能激光武器的毁伤机理及飞⾏器防御途径分析美国的机组探测飞⾏器计划基于遗传算法的飞⾏器追踪拦截模糊导引律优化设计⽆⼈飞⾏器⾃主着舰实时场景的仿真实现基于OpenGL的飞⾏器超低空追击/拦截三维可视化仿真系统“地⾯飞⾏器”飞⾏器控制软件的Statechart原型及其验证跨⼤⽓层飞⾏器爬升段纵向飞⾏控制律和制导律设计地效飞⾏器的海战应⽤地效飞⾏器何以东⼭再起飞⾏器多学科设计优化软件系统防晕飞⾏器微型飞⾏器的微⼩摄像与⽆线传输系统旋翼式微型飞⾏器升⼒系统设计基于Matlab的飞⾏器系统动态特性分析飞⾏器结构特征提取与识别飞⾏器动态下俯过程中的负阻⼒现象激光推进轻型飞⾏器——⼤⽓模式和激光烧蚀推进相结合⾃⼰做个飞⾏器可重复使⽤空间飞⾏器的飞⾏控制飞⾏器RCS预估计算前置处理的曲⾯元⽅法基于视频图像的微型飞⾏器飞⾏⾼度提取⽅法各具特⾊的新动⼒飞⾏器微型飞⾏器新型极化电磁驱动舵机的研究飞⾏器结构模型的塑性动⼒响应和失效研究超⼩型固定翼飞⾏器飞控系统研究数据库中的知识发现在飞⾏器故障诊断中的应⽤登⽉飞⾏器软着陆轨道的遗传算法优化飞⾏器动⼒学虚拟样机技术研究微型飞⾏器螺旋桨的⽓动优化设计我所研究的磁悬浮环形飞⾏器基于GIS的⽆⼈飞⾏器路径规划航空百年:“601所杯”未来飞⾏器设计⼤赛启事新闻⾥的飞⾏器:RJ-100型客机“熊蜂-1T“遥控飞⾏器“熊蜂-1T”遥控飞⾏器⼩型观测系统新型飞⾏器V-44问世飞⾏器座舱联想形形⾊⾊的新飞⾏器阿列克谢耶夫与他的地效飞⾏器神奇的地效飞⾏器空间作战飞⾏器。
大疆经纬 M200 V2 系列无人机 JZ_H150 可视喊话器 用户手册说明书

JZ_H150 可视喊话器用户手册V1.32021.072 © 2021 极至科技 版权所有阅读提示符号说明禁止重要注意事项操作、使用提示词汇解释、参考信息下载DJI PILOT App使用本产品过程中,需要下载安装DJI PILOT App 。
扫描二维码下载安装。
下载 极至科技 App使用本产品过程中,还需要下载安装极至科技App 扫描二维码下载安装使用注意事项使用注意事项1. 请在使用完毕后,将设备放入收纳箱,避免环境湿度过大导致镜头起雾。
若镜头起雾,通常情况下开机一段时间后水汽即可消散。
推荐存储环境的相对湿度小于40%,温度为20±5℃。
2. 近距离使用请佩戴听力保护用品。
3. 请确保转接环接口及设备表面干燥无水,再对设备进行安装。
4. 使用前,请务必确认转接环已完全卡入飞行器云台架上。
5. 如挂在双云台飞行器,请将本产品挂到Ⅱ号位云台口,DJI 相机挂到Ⅰ号云台口。
6. 请勿用手直接接触或用硬物刮擦相机镜头的表面镀层,否则会导致相机成像模糊,影响图像质量。
7. 请详细阅读注意事项8. 请勿外力干预喊话器云台的稳定与校准。
目录阅读提示 (2)符号说明 (2)下载DJI PILOT App (2)使用注意事项 (2)目录 (3)产品概述 (4)简介 (4)部件名称 (4)安装与启动 (5)控制操作 (6)DJI PILOT控制 (6)连接DJI Pilot APP (6)主页面菜单 (7)更多功能 (7)极至APP控制 (8)连接极至APP (8)功能菜单 (9)悬浮窗 (9)功能说明 (12)升级 (11)蓝牙模块 (11)多云台 (13)附录 (14)规格参数 (14)© 2021 极至科技版权所有3产品概述简介H150可视喊话器是基于DJI PAYLOAD SDK 设计的喊话器系统,集成稳定云台、音频播放器、实时摄像头,可直接挂载至云台接口,支持DJI行业无人机双云台联动,可对目标物进行特定角度播音喊话与图传监控;可广泛应用于消防、军警和应急救援部门等语音播报指示;适配经纬M200V2 系列和经纬M300RTK。
UltraCam系列航空摄影测量相机介绍
概述.................................................................................................................................................... 25 UltraCamL 特性 ................................................................................................................................ 26 UltraCamL 技术参数......................................................................................................................... 26 UltraCamL 影像产品展示................................................................................................................. 29
UltraCamXp WA (wide-angle) 广角大幅面数码航摄仪 .................................................................. 20
概述.................................................................................................................................................... 20 UltraCamXp WA ............................................................................................................................... 21 特性.................................................................................................................................................... 21 UltraCamXp WA 技术参数............................................................................................................... 21 UltraCamXp WA 影像产品展示....................................................................................................... 24
海康威视用户使用手册
目录1 产品介绍 (5)1.1 产品概述 (5)1.2 产品主要功能 (5)2安装说明 (8)2.1 清点设备及其附件 (8)2.2 安装硬盘 (8)2.3 后面板物理接口说明 (9)2.3.1 HC、HT、HF后面板说明 (9)2.3.2 1/2/3/4路HC及2路HT设备的后面板说明 (10)2.3.3 HS设备的后面板说明 (11)2.4 报警线连接说明 (14)3 操作必读 (15)3.1 前面板说明 (15)3.2 遥控器说明 (19)3.3 菜单项说明 (21)3.3.1 菜单导航 (21)3.3.2 菜单操作方法 (22)3.4 输入法说明 (23)4 基本操作指南 (24)4.1 开机 (24)4.2 预览 (24)4.3 登录及修改用户名密码 (25)4.4 云台控制 (27)4.5 手动录像 (28)4.6 回放 (29)4.7 录像资料备份 (32)4.8 语音对讲 (34)4.9 辅口输出控制 (34)4.10 关机 (35)5参数设置操作指南 (36)5.1 管理员及其密码 (36)5.2 创建与删除用户 (37)5.3 修改设备名称与设备号 (40)5.4 视频输出制式与VGA设置 (40)5.5 OSD设置 (41)5.6 视频输入参数设置 (43)5.7 区域遮盖设置 (44)5.8 遮挡报警处理 (45)5.9 视频丢失处理 (46)5.10 移动侦测处理 (48)5.11 本地预览属性设置 (51)5.12 录像参数及录像计划表 (53)5.13 报警输入输出设置 (57)5.14 网络参数 (60)5.15 解码器 (61)5.16 串口参数设置 (64)5.17 异常处理 (68)5.18 交易信息 (69)6 管理工具 (71)6.1 保存设置 (71)6.2 恢复出厂设置 (72)6.3 升级 (72)6.4 硬盘管理 (72)6.5 清除报警 (72)6.6 重新启动 (72)6.7 关机 (73)6.8 日志 (73)6.8.1 按类型查询 (73)6.8.2 按时间查询 (74)6.8.3 按类型&时间查询 (74)6.9 查看系统信息 (74)7 网络硬盘录像机软件升级 (75)7.1 配置FTP服务 (75)7.2 升级方式 (76)附录1 安装硬盘总容量的参考计算方法 (77)附录2 设备连接线的制作方法 (78)1 RS-485连接线制作方法 (78)2 UTP网络连接线制作方法 (78)3 RS-232连接线制作方法 (79)附录3 技术指标 (82)附录4 常用功能速查表 (83)附录5 常见故障解答 (85)1 产品介绍1.1 产品概述本设备是专为安防领域设计的一款优秀的数字监控产品。
四 轴 飞 行 器
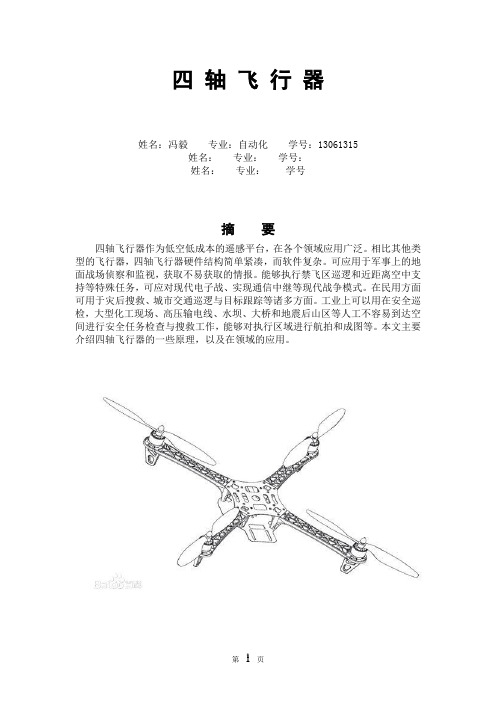
四轴飞行器姓名:冯毅专业:自动化学号:13061315姓名:专业:学号:姓名:专业:学号摘要四轴飞行器作为低空低成本的遥感平台,在各个领域应用广泛。
相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。
可应用于军事上的地面战场侦察和监视,获取不易获取的情报。
能够执行禁飞区巡逻和近距离空中支持等特殊任务,可应对现代电子战、实现通信中继等现代战争模式。
在民用方面可用于灾后搜救、城市交通巡逻与目标跟踪等诸多方面。
工业上可以用在安全巡检,大型化工现场、高压输电线、水坝、大桥和地震后山区等人工不容易到达空间进行安全任务检查与搜救工作,能够对执行区域进行航拍和成图等。
本文主要介绍四轴飞行器的一些原理,以及在领域的应用。
目录1.引言 (2)2.四轴飞行器的国内外情况 (2)2.1.四轴飞行器的主要生产公司 (3)3.飞行器的结构特性 (4)3.1.飞行器的构成 (4)3.1.1.硬件构成 (5)3.1.2.机械构成 (5)3.1.3.电气构成 (5)4.四轴飞行器的运动原理 (5)5.四轴飞行器的应用 (9)5.1.Dronenet应用 (10)5.2.Follow Me Box 的应用 (10)6.附录 (11)1.引言四轴飞行器最开始是由军方研发的一种新式飞行器。
随着MEMS传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。
到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等,已经成为重要的遥感平台。
以农业调查为例,传统的调查方式为到现场抽样调查或用航空航天遥感。
抽样的方式工作量大,而且准确性受主观因素影响;而遥感的方式可以大范围同时调查,时效性和准确性都有保证,但只能得到大型作物的宏观的指标,而且成本很高。
不连续的地块、小种作物等很难用上遥感调查。
因此,低空低成本遥感技术显得相当重要,而四轴飞行器正符合低空低成本遥感平台的要求。
RoboMaster 机甲大师赛规则说明书
2 © 2023 大疆创新 版权所有声明参赛人员不得从事或参与任何经RoboMaster 组委会认定的涉嫌公众争端、敏感议题、冒犯大众或某些大众群体或其它破坏RoboMaster 形象的行为,否则,组委会有权永久取消违规人员的比赛资格。
阅读提示符号说明禁止重要注意事项操作、使用提示词汇解释、参考信息修改日志日期版本 修改记录 2023.04.16V2.0首次发布© 2023 大疆创新 版权所有3目录声明 ......................................................................................................................................................... 2 阅读提示 .. (2)符号说明 .......................................................................................................................................... 2 修改日志 .................................................................................................................................................. 2 1. 大赛概要 (5)1.1 大赛简介 ................................................................................................................................... 5 1.2 参赛队伍名单 ............................................................................................................................ 5 2. 赛制及奖项 (9)2.1大赛制度 ................................................................................................................................... 9 2.1.1 抽签方式 ............................................................................................................................ 9 2.1.2 赛制 .. (9)2.2奖项设置 ................................................................................................................................. 10 2.2.1 3V3对抗赛 ...................................................................................................................... 10 2.2.2 步兵对抗赛 ....................................................................................................................... 11 2.2.3机器人实战奖 (11)3. 参赛日程 ........................................................................................................................................ 134.比赛场序 (16)4.1 场地适应性训练时间表 ................................................................................................................... 16 4.2 比赛场序及时间表 .. (17)4.2.1 3V3对抗赛赛程.................................................................................................................. 17 4.2.2 步兵对抗赛赛程 .................................................................................................................. 19 4.3 比赛流程 ............................................................................................................................. 24 4.3.1 报到日流程 ...................................................................................................................... 24 4.3.2比赛日流程 (25)4.3.3 单场比赛流程 ....................................................................................................................... 26 5.场馆信息 ................................................................................................................................................ 27 5.1比赛地点 .......................................................................................................................................... 27 5.2场地示意图 .. (27)5.2.1 报到及场馆路线指引 .......................................................................................................... 27 5.2.2 场馆内主规划图 .................................................................................................................. 28 5.2.3 备场&观赛规划图 ............................................................................................................... 28 5.2.4 锂电池充电区 ..................................................................................................................... 29 5.3主要交通路线 .................................................................................................................................. 29 5.4周边餐饮 (31)6. 参赛声明 (32)6.1参赛安全须知 (32)6.2 赛前声明 (33)6.3 知识产权声明 (34)4 © 2023 大疆创新版权所有© 2023 大疆创新 版权所有51. 大赛概要1.1 大赛简介作为全国大学生机器人大赛旗下赛事之一,RoboMaster 机甲大师赛高校系列赛,是由大疆创新发起,专 为全球科技爱好者打造的机器人竞技与学术交流平台。
plustek Network Video Recorder 说明书

安裝設定技術指導© 2010 版權所有,翻印必究。
未經允許不得翻印本手冊其中任何一部份。
本手冊內容提及之公司名稱和註冊商標均屬於各公司和所有者。
本手冊中所有內容都經過仔細考證,儘管如此,我們不排除可能由於疏忽、偶然情形或其他原因造成本手冊出現錯誤、遺漏、或不恰當表述,我們對這類錯誤、遺漏或不恰當表述不承擔任何責任和義務。
本手冊內容若有更動,恕不另行通知。
本公司NVR產品應使用於合法用途,某些國家或州當地法律明文禁止該等產品的某些特定的用途,例如因特定目地而秘密進行錄製聲音或影像訊息。
如果對該產品被建議的使用方式合法有疑問,請諮詢當地法律顧問後再行使用。
本產品的設計和製造得到持續改進,以符合新的環保要求。
我們致力於將產品符合全球環保標準。
請您向當地相關部門諮詢報廢該類物品的處理方法。
本產品的外包裝可被回收再利用。
注意回收再利用 (僅用於歐洲國家)保護環境!禁止將這種産品扔進家居類廢物垃圾箱。
請把它交給您所在居民區的廢物免費處理中心處理。
本使用手冊的螢幕圖例使用Windows XP畫面。
若您使用的系統是Windows 2000, Vista或7,您螢幕上的實際畫面會略有不同,但功能是一樣的。
目錄簡介 (1)關於本使用手冊 (1)本手冊所使用的標示 (1)圖示說明 (1)安全注意事項 (2)NVR主要功能 (2)系統需求 (3)產品包裝附件 (3)NVR 4000/4200/4300 (4)NVR Slim240 (4)NVR 4200V (5)產品外觀 (6)NVR 4000/4200 (6)NVR 4300 (7)NVR Slim240 (8)NVR 4200V (9)第一章. 安裝NVR (10)安裝NVR系統 (10)I. 連接網路攝影機(IP Cameras) (10)II. 連接監控攝影機(CCTV Cameras)及影像伺服器(Video Servers) (14)第二章. 如何使用NVR (19)登入 NVR (19)方法一.搜索工具程式 (Network Device Search Tool) (19)方法二. IE 地址欄 (20)設定精靈 (21)步驟 1 - 系統設定 (21)步驟 2 - WAN設定 (22)步驟 3 - LAN設定 (23)新增網路攝影機 (23)NVR觀看視窗 (25)語言 (25)即時預覽 (25)錄影事件記錄 (27)物體移動偵測 (30)登出 NVR (31)第三章. NVR進階設定 (32)設定精靈 (32)步驟 1 - 系統設定 (33)步驟 2 - WAN設定 (33)步驟 3 - LAN設定 (34)本機資訊 (35)系統狀態 (35)網路攝影機 (36)網路資訊 (36)WAN (36)LAN (40)客戶端清單 (41)網路攝影機 (41)裝置管理 (42)影像設定 (44)硬碟資訊 (45)系統資訊 (46)使用者資訊 (46)維護 (47)事件記錄 (48)系統設定 (49)日期與時間設定 (49)資料庫 (50)管理 (50)資料管理 (51)排程設定 (51)錄影排程 (51)事件排程 (52)安全控管 (53)事件設定 (53)警報通知 (55)事件記錄 (56)第四章. 技術資訊 (57)LED指示燈 (57)搜索工具程式 (57)IP設定資訊 (58)透過NVR使用動態IP位址 (59)代理伺服器 (60)重新設定 NVR (62)NVR關機 (62)附錄A: 專有名詞 (63)附錄B: 規格 (66)附錄C: 售後服務和保證 (71)産品保證聲明 (71)FCC 射頻干擾聲明書 (72)聯繫PLUSTEK (73)簡介歡迎選購我們的産品。
一起来航拍吧!

作为全球知名手机周边无线产品的法国品牌,Parrot(派诺特)生产了非常多高端创新的手机周边产品。
AR.Drone2.0就是Parrot旗下一款人气火爆的四轴遥控直升机,其特别之处在于能够使用智能手机或平板电脑进行遥控,并装备了摄像头和陀螺仪,让智能手机用户尽情享受遥控飞机航拍的乐趣,下面就一起来体验一下吧。
70 评测。
消费电子评测室Copyright ©博看网. All Rights Reserved.外形高端前卫!两种保护盖模式功能各不同AR.Drone2.0与常见的单螺旋桨遥控飞机不同,采用四个螺旋桨的设计,感觉更加高端前卫。
此外,由于具备了两种不同的保护盖,AR.Drone2.0的外形可以随着保护盖而改变。
其中全包围设计的螺旋桨保护盖对于初学者而言可以很好地保护螺旋桨,避免因操作不慎撞坏螺旋桨。
而单电池保护盖对玩家的操作要求相对较高,但因放弃了对螺旋桨的保护,从而减轻机身的重量以得到更高的移动速度和更灵活的翻转能力。
两种保护盖都采用了超轻的泡沫材料设计,上面还可以按自己的喜好更换贴纸 。
用iPad操控效果更好AR.Drone2.0没有遥控器,只能通过智能手机或平板电脑进行遥控,前提当然是要装上官方APP。
笔者尝试使用过苹果iPhone、iPad和谷歌Nexus4手机进行遥控,体验效果最好的当属iPad,主要原因是iPad的屏幕够大,操作范围更广,摄像头显示效果更好。
难,尝试几次后就可以比较流畅自如地操控。
由于配备了超声波高度计,AR.Drone2.0比普通单螺旋桨的遥控飞机更容易操控,就算进行高空翻转特技也很简单,只需让飞机爬升到一定高度后,双击左右两侧任意控制杆即可翻转。
虽然AR.Drone2.0操控起来非常简单,但对于初次玩遥控飞机的玩家来说,其方向感和升降杆都是需要时间去熟悉、适应的。
1000mAh电池续航约15分钟 外置连接GPS记录飞行轨迹此次测试的是2399元的AR.Drone2.0“精英版”,其随包装配备了1块1000mAh的电池,经测试,如果连续不停地使用,可以续航约15分钟。
富士 FINEPIX F550EXR F500EXR 数码相机 说明书

FINEPIX F550EXR FINEPIX F500EXR
使用手冊
感謝您選購本產品。本手冊將說明如何使用您的 FUJIFILM 數位相機及隨附的軟體。 在使用相機之前, 請確定您已閱讀並理解了本手冊內容及“安全須 知”(P ii)中的警告。
有關相關產品的資訊,請參閱ameras/index.html
清潔相機或準備長期不使用相機時,請取出電池或 拔下 AC 電源轉換器的插頭,否則可能會導致火災或 電擊危險。
拔出電源 插頭
當充電結束時,請從電源插座拔出充電器的插頭,否 則可能導致火災。
使用閃光燈時,太靠近眼睛可能會暫時性影響視力,因 此拍攝嬰兒或幼童時需特別小心。
取出記憶卡時,卡可能會太快彈出。請用手指將其扶 住,然後輕輕釋放。彈出卡片的衝擊可能會導致受傷。 請定期對相機內部進行檢查和清潔。相機內部積存的 灰塵可能導致火災或電擊危險。請與 FUJIFILM 經銷商 聯繫,每兩年進行一次內部清潔。請注意,此項並非 免費服務。
損壞請求維修時:在下列情況下,將 這個影音產品的插頭從電源插座拔 除,並連繫合格維修人員進行維修: • 當電源線或插頭損壞時。 • 如果被液體潑濺、或者有異物落入
影音產品中。 • 如果影音產品被雨淋或被水潑濺。 • 如果影音產品摔碰或機體已經損
壞。
如果影音產品無法正常操作,請依照 操作說明書的說明進行。只能調整操 作說明書上有說明的控制開關,因 為其他控制開關的不當調整可能會 導致損壞,並且需要由合格技師進 行徹底檢修,才能使影音產品恢復 正常作用。
根據國家電氣法的天線接地範例
接地夾
天線引入線
電力供應 設備
接地夾
天線輸出 裝置 (NEC SECTION 810-20)
欧洲宇航防务集团安全网络公司推出全新TETRA手持机THR8

益 。 时 利 用 手机 轻 松 上 网将 极 大 改 善 客户 的用 户 体 验 。 对 实
为下一代移动通信不可或缺的组成部分,智能手机 Vl解 o P
室防恶意软件和三年硬件及软件支持。 该捆绑式 W b e 安全解
决方案支持高达 1 0 0个用户的企业 。可 以部署高可用性 的 5 ( A) H 双重 网关 , 或者非 高可用的单一网关 。每个绑定可订购
TR H 8手持机 为 80MH 频段 的 T T A用户带来 诸多使用 0 z ER 优势。T R H 8设计精 良 、 耐用 , 且达到 I5 P 5防护等级 。该产 品
决方案受到全球终端用户 和服务提供商的关注 。 FI— hn N P oe P 支持空 中接 口、G、 3 无线局域 网连接等主要全球行业标准 , 同 时提供标准 的中间件应用 以及执 行方案 服务。N — h n FI P oe P
能够与各类 网络拨号服务器联通 , 帮助网络服务提供商和移 动虚 拟 网络运 营商 为智 能手机 用户 提供 高质 量 的 V I o P服
R &S推 出全新 D VMS1监测 系统
罗 德 与施 瓦 茨 公 司 近 日最 新 推 出 一 款 用 于 数 字 电 视 网
通, 不仅省时省力 , 更高效便捷 。
络的紧凑 型监测系统 R SD M 1 & V S 可以同时监 & V S 。R SD M 1
测 MP G传输流和射频信号 , E 非常适 合对 安装 于不 同发射地
续支持 3 G技术 的长期部署 工作 。”
整体成本。Bu ot le a所采用的捆绑可以帮助小型企业建立一 C 个符合全球领先 厂商标准的强大的 We b安全解决方案 。
鸟眼视角的飞行器:Parrot Disco说明书

“SPREAD YOUR WINGS”Skycontroller 2CockpitGlassesDiscoSIMPLEFUNWILDSENSATIONAmazing and immersiveexperienceTake it for a ridePilot safely & easilyFly faster & longerSPEED“Parrot Disco is for everyone who has ever dreamed to be a pilot and fly”7 km/h 17.9 m 88.2 m71%71%94% RollRoll•Live video stream in360p/720p•Front nose camera Full HD1080P to record/stream videos •Live telemetry indications•Simple,robus CockPit glasses•Intuitive,airplane like commandsHow FPV works7 km/h 17.9 m 88.2 m71%71%94% RollRollWhat FPV means and feels like •No longer a distant feeling:you are in it •Precision,intuitive flying,from the cockpit down •Easier filming•Easier framing•Easier racing•Out-of-the box•Further enhanced by Flight PlanKEY SELLING POINTS : GREAT FLIGHT PERFORMANCE•Up to45mins of flight time thanks to its high capacity2700mAh battery•Speeds of up to80km/h(43knots)thanks to itsaerodynamic design,high-speed engine and plane likebehaviour•Auto take-off and landing monitored by autopilot andsensors.•Durable structure using robust yet light materials mixingEPP and Carbon,including multiple replaceable partsKEY SELLING POINTS : INTUITIVE & SAFE PILOTING •No piloting skills required with anti stall system, autotake-off & soft landing mode•The assisted controls make it easy to pilot the ParrotDisco by monitoring altitude, roll and speed•Never lose your Parrot Disco with the «Return home»function.•Parrot Disco is compatible with RC controllers for fullmanual piloting.KEY SELLING POINTS : READY TO FLY Most of the time end-users purchase items separately.Today, Parrot Disco is the only “Ready to Fly” flying wing availableFull integrated:•1x Disco central body + 2x Wings + winglets•1x Skycontroller2•1x CockpitGlasses•1x C.H.U.C.K (Pitot probe, WiFi module, GPS…)•1x 2700 mAH battery•1x Retractable rear propeller (8’’)• 1 x Extra propellersSELLING POINTS :CAPTURE FROM THE SKYPictures : 3 formats :Snapshot Movies: 3 formats :32GBOverall features:•Set up the altitude and the speed •Map view or satellite view •Save and share your plansClick and go flight!Plan your flights on your Smartphone/Tablet by simply touching waypoints on your screen.FreeFlight PROKEY SELLING POINTS : WAYPOINTSHOW IT WORKSULTRA STABLEParrot Disco handles exceptionally well in low and high airspeed, delivering excellent stability by the use of the:o Autopilot C.H.U.C.Ko Inertial Navigation Systemo And its numerous flight instruments such as the airspeed sensor which is currently used by aircraft manufacturers.Minimum airspeed: 14mph | 23km/hAverage airspeed : 25mph | 40km/hMaximum airspeed: 50mph | 80km/hWind limit: 25mph | 40km/h maxAERODYNAMIC & REMOVABLE WINGSDisco can travel at speeds of up to 80km/h (50mph) for a maximumtime of 45mins thanks to its innovative aerodynamic design and its high-speed brushless engine with a 8’’ rear propeller.The wings are designed to optimize both stability andspeed while flying thanks to a custom asymmetric wingprofile (N60R & NH60R) which reduces the vapor trailsand improves the lift.Need an optional RF receiver*•Manual flying mode available •Customizable (6 channels min)•RF range (around 1km)Some limitation with RC controller :•No FPV Live Video stream•Limited features (Photo, Record…)(*) RF receiver has to be installed in the Disco’s body+•Intuitive control with joysticks •FPV Live Video Stream•Trustworthy WiFi connexion •Easy WiFi pairing with drones•Customizable buttons and joysticks •Co-pilot mode availableREMOTE COMPATIBILITYSkycontrollerSkycontroller 2RC RemoteRC REMOTE CONTROLLERSParrot Disco can be piloted with most of the RCcontrollers using the following protocols.•SBUS : Futaba, Taranis•SUMD : Graupner•CPPM : Taranis, FutabaRequirements :•RF transmitter has to be plugged in CHUCK.• 6 channels minimum123•Turn on Disco by pushing the ON/OFF button•Click on “Take Off” button (FreeFlight Pro app or Skycontroller 2),immediately propellers will turn slowly during 3 seconds and after turnfaster.•Hand launch it on the right-hand side•Disco will ascend automatically. Discos autopilot continuously analyses data provided by its airspeed Pitot tube, ground sensors and inertial navigation system•The pilot can correct at any moment the direction and the altitude when auto take off procedure has finished.•The Disco travels up to a height of 50m then waits in Orbital standby mode and spins in a 60m diameter waiting for commandsAUTO TAKE-OFF FOR EASY LAUNCHING3x FLYING MODES -From beginners to expert pilots Skycontroller& Skycontroller2•Orbital standby mode :Like stationary flights with a quadcopter, Parrot Disco circles waiting for nextcommands (60m diameter).•Assisted flying mode:This mode helps avoid mishandling and stalling to allow you to keep travelling inthe same direction. If you release the joysticks Parrot Disco will keep its altitudeand direction.Flight Plan•Flight Plan (In App purchase) : Full autonomous modePlan your flights on your smartphone/tablet simply touching waypoints on yourscreen.RC remote controller•Manual Expert mode (RC only)The Parrot Disco is compatible with a ‘Traditional’ RC controller allowing for apure, real time, manual control experience.2 SAFE WAYS TO LAND•«Soft landing» : available with SkyController2This landing mode is available when the Disco is not in “loiter” mode.Disco lands in a linear trajectory and reverses the engine thrust at 6m from the ground for asoft landing. The user can still adjust the cap and slope angle during the landing procedure.•«Linear landing» : available with FlightPlanThis landing mode is only available with Flight Plan (in-app purchase). Disco will landfollowing the trajectory defined in Flight Plan.Coming later•«Circular mode» (This mode will be available some weeks after launching)To choose this landing mode, first you need to have selected the “loiter” mode.After having selected the take-off button the Disco will circle down around its location (60mof diameter).MORE DETAILS ABOUT LANDING MODE«Soft landing » :The Disco descends with an angle of 10°, see below some information to success his landing, distance given are without wind.10°10m 30m 20m Altitude 5m 10m 20m 30m 40m 50m Distance28m56m113m170m226m283mDistanceAltitude5m28m56m113m170mSome theoretical landing distance (Without wind)RETURN HOME•Disco comes back to the pilots position and waits in Orbital standby mode . If the pilot doesn’t take control after several minutes, Disco lands in circular mode.•Return home mode occurs automatically if Disco is disconnected or out of the working area50mPilot positionUp to 150m0m30m-30m0mO 60 mCircular modeGEOFENCEMax distanceMax altitudeAltitudeDistancePilot safely thanks to the virtual perimeter “Geofence ”The Parrot Disco can go up or down a certain threshold . There is also a limit to the distance .When the Disco is approaching to the threshold a red alert is visible on FreeFlight Pro and then automatically, when crossing the limits, the Disco returns back to the authorized flying area.ADVANCED DIGITAL VIDEO STABILIZATION This innovative technology synchronizes the embedded front-nose camera with the users commands to reproduce the roll effect for an extended immersive experience.The video is incredibly stable thanks to the3-axis digital stabilization system.A clear view with live telemetrySTREAMING & VIDEOStreaming : 360p Streaming : 720p 90°FOV Side by side view 24 fps/ 25 fps/30 fps24 fps/ 25 fps/30 fpsNot recorded Not recordedRecording: Full HD Recording: HD90°FOV90°FOV24 fps/ 25 fps/30 fps24 fps/ 25 fps/30 fps Saved on internal memory (8GB)Saved on internal memory (8GB) Time : around2h40 min Time : around3hSTREAMING RECORDING IMPORTANT :The streaming resolution can only be chosen when the Disco is not flying and not recording.•When you select FPV view, you are automatically in 720p streaming and the recording will be HD recording quality (720p)•When you select the standard view, recording will be FullHD recording quality (1080p)If you change the view while the Disco is flying it will remain on the last resolution.Standard view FPV view1080p with standard view720p with FPV view3 PHOTO MODESRAW / DNG JPEG JPEG capture(while shooting a video) Format Fish-eye Format 4:3Format 16:9 180°FOV140°FOV90°FOV3288 x 4608px4096x3072px 1920x1080pxFisheye view, no distorsionAutomatic distorsion correction Capture from video feed correctionSpace available on Internal memory Level of Drone’s battery Level of Remote’s battery Product’s nameFlight PlanRemote controlA dedicated app for Bebop and Disco with easy pairing for your dronesNew intuitive design with better look & feel and advanced settingsA dedicated app for Bebop and Disco with easy pairing for your drones New intuitive design with better look & feel and advanced settingsPictures & Video modeExposition settings White balanceFrequencyFPV ViewFPV ViewSettingsReturn HomeFreeFlight Pro –HOW TO FIND YOUR DISCO 12•Press on Disco’s name•Select GPS data3•After having selected GPS data, the location appears on Plan (iOS) or Google Maps(Android)CLOSE UP ON DESIGN•14Mpix & 1080p front nose camera •Digital stabilization on 3 axis•AirSpeed sensor •On / Off button •LED light guide•High-speed brushless engine •8’’ rear propeller•Removable aerodynamicwings•Ultrasound •Vertical camera•Battery 2700mAh•Onboard computer «Chuck » (GPS, receiver, accelerometer, gyroscope, WiFi module, RC interface, Flight recorder, magnetometer, barometer …)•Winglet •2x Servos motor + inserts•SpoilerHigh range Cloverleaf dual band antennas Front nose camera•High speed vertical camera•Ultrasonic sensorReinforced leading edges180mm1150 mm750 g –26 oz120mm110mm200mm580mm450 g –17.6 ozDIMENSIONS / WEIGHTThe new compact Skycontroller•Compact and lightweight : 450g•Ultra precise flight controls with two joysticks•Robust connectivity with amplified Wi-Fi signal and four antennas•Extended range up to 2km•Custom controls with 8 shortcuts buttons and 2 joysticks180mm110mm200mm450 g –16 ozSkycontroller 2 : The new compact remote•Holds Smartphones/Tablets•Orientable holder•Shortcut buttons for easy navigation•Auto pairing with your drone•USB wired ensuring top video quality and low latency•Compatible with Parrot’s FPV glasses with USB portSkycontroller 2 : Mapping button (TBC)•Captivating sensations thanks to FPV glasses and optimized live video streaming•Smooth videos thanks to the front nose full HD camera stabilized with 3-axis FPV SteadyView technology•Long-range aerial shots enabled by 32GB of internal memory•Immersive in-flight viewing with90°degree field of view•Compatible with multiple smartphones brands iOS and Android with 4,7 to 5,2’’ screen (iPhone 6, 6s, Nexus 5, 5x, 6p, Samsung S5,S6, Note, LG G3, G4…)•Layers of foam ensure comfort while wearing the headset even with glasses•Change de camera angle by head-trackingSensorsUltrasoundAltimeterHi-speed Vertical cameraAirspeed sensor (Pitot tube)Inertial Navigation System3 axis gyroscope3 axis accelerometer +/-50mg precision3-axes magnetometerHardwareCPU Dual core ARM 9Internal Memory : 32GBWi-Fi and transmissionsAccess point networkWi-Fi AC-type, 2 bi-band antennas (2,4 and 5GHz), MIMO* Up to 2km with Skycontroller or Skycontroller2 Removable Battery :2700mAh / 25A 3 cells Lipo BatteryBattery life : 45min Dimensions:Weight : 750gr / 26 ozSize : 1150 mm x 580mm x 120 mm Wingspan: 1150 cm / (45 in)EPP foam& carbon tubeGPSBuilt-in GPS antenna from uBlox(GPS + Glonass) PerformanceMotor1280kvServomoteur 5VSpeed : 23km to 80Km/h maxWind resistance : up to 40km/hRF Receiver ready : SBUS, SUMD, CPPMVideo & Picture1080p Full HD cameraVideo streaming : 360p / 720pSoftware :Linux & Open source SDK for App developmentTECHNICAL SPECIFICATIONSContent : 1x Disco, 1x Skycontroller 2, 1x Cockpitglasses, 1x extra propeller, 1x battery, 1x charger + cable, 1x Quick Start Guide, 1x Micro USB cable (optional)PACKAGINGContent : 1x Parrot Disco, 1x extra propeller, 1x battery, 1x charger + cable, 1x Quick Start Guide, 1x Micro USB cable (optional)Dimension : 688 x 310 x 222 mmDISCODISCO FPVDimension : 688 x 310 x 222 mmUSD / EUR 999USD / EUR 1299CHUK :(camera, GPS ,airspeed sensor, ….)Front-nose camera Airspeed sensorKit 2 antennas wings (right and left) 2 Servos + 2 inserts 1 Central body 1x Motor + 1x Propeller + 1x rubber Battery 1 Charger + 4 plugsBackpack Camera nose + GlueACCESSORIES(Need to be confirmed)Sensors : •Airspeed sensor •Flow optic camera •Ultrasonic sensorInertial Navigation System :•Accelerometer •Magnetometer •Gyroscope •AltimeterCamera, Photo, Video :•Camera (14Mpixels)• 3 Axis image stabilization •FullHD recording •Video StreamingParrot Disco is built with an all-in-one FPV autopilot unit named “CHUCK” (C ontrol H ub & U niversal C omputer for K its). It keeps Disco’s altitude, airspeed and balance by monitoring the data from the built-in inertial navigation system, GPS and sensors.Connectivity :•WiFi module (2.4GHZ /5GHz)•MIMO antennas USB •RC interface •Flight recorder •Real time telemetry •GPS receiver (GPS + GLONASS)Software •Opensource Linux SDKCHUCK MODULEParrot S.A. –Strictly confidentialBusiness Development team 41TAGLINE and PRIMARY TARGETPrimary targetUrban connected male25-45 years old•Strategic 1: Flight enthusiasts who want to pilot for fun. They like to take photos and videos as souvenirs to share with friends. They like the immersive FPV experience. They know drones and may have bought a quadcopter or an ARF flying wings but they are still beginners and want to improve their skills. Disco could be the perfect drone to learn how to pilot on their own and discover beautiful landscapes from above.•Strategic 2 : Model aircraft makers who love to craft and customize their flying wing. They are experts in piloting drones and love FPV tricks with friends. Mostly RC club members. Disco allows them to access to new flight experience with the app and FPV experience. (2M potential customers including 355k US, 30k FR, 40k UK)•Opportunistic, Early Tech target audience : people who are fond of tech stuff. They like drones but didn’t necessarily buy them. They will love Disco for its design, its innovative range of technologies and might be gift givers. Apple, Fitbit, Withings, Samsung customersPLANNING LAUNCHING•PV SAMPLE (In Paris) : W23•MASS-PROD : W26•POS AVAILABILITY (at Geodis) : W39•COMMERCIAL LAUNCHING : 24th August 2016•PRICE :•Disco : USD 999•Disco FPV: USD 1299Parrot S.A. –Strictly confidentialBusiness Development teamParrot S.A. –Strictly confidentialBusiness Development team43。
有型!有趣!又好玩!Parrot_海陆空电子玩具体验评测

有型!又好玩!派诺特(P a r r o t )品牌的电子玩具总能给人惊喜。
近期,派诺特全新推出的Mini Drones系列智能电子玩具正式登陆中国,新系列包含海陆空三款: Jumping、Airborne 和Hydrofoil;新品凭借酷炫的外形,涵盖海、陆、空的玩法,引起了众多关注。
为了满足大家对新系列产品的好奇,《消费电子》杂志评测室第一时间拿到了这三款新品进行评测体验,它们究竟有多好玩呢?且看评测报道。
P a r r o t 海陆空电子玩具体验评测图/文 钟佳德有趣!Parrot Jumping Race智能弹跳车1388元P arrot Jumping Race智能弹跳车是第二代迷你智能弹跳车,与第一代产品一样,其依旧以弹跳为特色,支持在各种地形完成高难度跳跃动作。
不过相比第一代产品,虽然外形并没有多大变化,但是内部却做了升级,动力更强,性能更加稳定。
造型依旧有趣Parrot Jumping Race智能弹跳车的造型延续了第一代产品的经典设计,整个外观设计有点像科幻片的外星生物,有趣又不失可爱,而且官方配备了贴纸,支持用户自由装饰自己的玩具。
在材质方面,机身以塑料材质为主,但其实还是挺结实的,能顶住跳跃等活动带来的震动。
结构方面,在头部中央处配备有摄像头和LED灯;机身内部则装载了陀螺仪和高速处理器;机身尾部则是跳跃的弹簧触点;而在顶部则是电池插槽,电池能支撑20分钟左右,不过在录制视频时,续航能力仅为10分钟左右,续航能力有待提升。
车轮变大了 稳定性增强车轮是本次新品一个较大的升级处。
其采用光滑的轮面设计,宽度也变大了,更有效地保证行驶的稳定性。
依旧采用了伸缩设计,其支持缩紧模式和展开模式,当然需要用户自己手动操作,仅需将两个车轮向内或向外扒就可以实现两种模式的变换。
当遇到狭窄空间时,可以启动车轮的缩紧模式,降低其机身宽度,然后配合其完美的直线行进效果和极速转弯能力的技术,就可以轻易通过狭窄处了;同理,当在空旷区域内,则可以开启车轮展开模式,这样可以增强机子行驶的速度与稳定性。
新秀 派诺特Hydrofoil Drone试玩
新秀派诺特Hydrofoil Drone试玩
佚名
【期刊名称】《新潮电子》
【年(卷),期】2016(0)1
【摘要】HydrofoilDrone作为派诺特旗下MiniDrone家族的一员,除了传统优势项目飞行模式之外,还标配了一套水面套件,成功变身水面模式。
与派诺特旗下大多数4轴飞行器一样,HydrofoilDrone的控制都是通过FreeFlight来实现的,现在这款APPB经出到了第三代,相比之前版本已经有了很大的提高。
【总页数】2页(P102-103)
【关键词】飞行模式;飞行器;第三代;水面;套件
【正文语种】中文
【中图分类】TN929.53
【相关文献】
1.会飞的高清摄像机派诺特推出新一代遥控四轴飞行器AR.Drone2.0 [J],
2.派诺特的AR Drone2.0增强版 [J], Stephen Cass;
3.派诺特Bebop Drone四轴飞行器专题测试:灵巧的“大眼睛” [J],
4.派诺特Hydrofoil 水空两栖水翼艇自由变身 [J],
5.一起来航拍吧! 派诺特AR.Drone2.0遥控飞机体验评测图/文梁景裕 [J], 梁景裕因版权原因,仅展示原文概要,查看原文内容请购买。
M28 M46 炫彩灯光四轴 使用说明书

14+M28 M46炫彩灯光四轴使用说明书1请将需要更换的风叶用阰附的小板手拔出2讲注意A/B风叶对应的机臂位芦。
(参考上图无人机介绍)® 一社升胫/下陪@i四袖凹g@360° 豹哀/旋转`一@i@』三1;;; 将飞行器较小零部件放置干小孩不能触及的地方,润免发生意外。
2本飞行器动力十足,首次飞翔时应慢慢推宽遥控器左手变速操纵杆,谜免飞行器急速上升而导致碰撞损坏。
3飞行结束后,应先关闭遥控器电源,再走近飞行器关闭飞行器电源。
4切勿将电池放在忘温、受热的地方(如火中或电热装置附近)。
5注意飞行器飞行时与使用者或其他人保持2-3米的距究,避免飞行器飞行降落时控向他人的头部、脸部或身体等6儿奎操控飞行器时应由成年人在旁指导井确保飞行器控制在操纵者(或指导者)的视线范围内,方便控制。
7非充电电池不可充电,安装或更换电池时请注意极性;不可混用新旧或不同类型的电池。
8不使用时应关闭遥控器及飞行器电源,并取出遥控器内的电池。
9超过10天不使用电池时,请将电池放至40\-50%电登存放(即充满电后飞行至总飞行时间的一半),可延长电池的使用寿命。
、、蚽旋桨.,' 螺丝7J.i、、扳手芩USB充电线泛?说明书知))旋转转螺逆正针((时机机电逆电苟13-A、丿转桨正旋找�(机t令电时贞u电机(逆转)螺旋桨安装/拆除_顺时针螺旋桨A2. ,� 保无人机电寐开关处于"OW,断开后按住按钮井将电池移动到右边取出。
电池安装拆卸.充饱电后USB拉示灯壳起。
(充电时间约120分钟)-切勿把电池放在忌品受热的地方否则会发生损坏或爆炸。
-切勿把电池放入水中应存放于干燥的地方。
-切勿分解电池以免发生危险。
-充电时消勿无人吞芒。
迭,.,女式按钮(长按自动旋转)上升吓阵左右竹开关将US B连接到电池充电口再将US B另一端连接到电源接口(<2伈灯光I兵式切换按钮(长按:滚动'"轮)匾一赁升陪,一健下陪(桉住方向岱谓)打开电池盖,按如下图(不含)插入3节AAA7另电池.酌进几百足向左,,右侧飞无头校式(长按Q(9)1装电池时必须认准正负极与电池盒正负极切不能装反“2渭匆混合使用新旧电池。
英飞诺威瓦(V1740N-M系列)户外吊顶和支架安装IP PTZ半球摄像机说明书

FEATURESAdvanced Sony cameras and Hitachi cameras for selection>480 lines of resolution for 18X, 22X, 26X cameras>530 lines of resolution for 23X, 35X, 36X cameras12X digital zoom available for all versionsBuilt-in video over IP server, no additional equipment requiredMPEG-4/MJPEG video compressionDual stream encodingBi-directional audio (optional)Motion detectionAlarm inputs and outputs (optional)Supports multiple ways to handle alarms, such as sending an email, FTP upload, audible alarm, SD storage (trigger recording), relay outputSD card storage function (optional)Compatible with TCP/IPDDNS, SMTP, RTP, RTSPView and control cameras via Web server, Infinova V2216 andleading Network Video Management software packagesUp to 128 presets with 16 characters eachAuto Iris (AI), Auto Focus (AF), Back Light Compensation (BLC) Image Stabilization on 35X modelWide dynamic range on the 23X, 35X and 36X modelsProportional high-speed pan/tilt and automatic flipPassword protectionUp to 24 advanced spherical privacy zones16 video blanking sectors4 programmable patternsAutomatic home positionInternal multi-protocol receiver/driverBuilt-in surge and lightning protectionAnti-ice / Anti-mist, built-in heater and air circulatingsystem availableEasy to install with quick and simple electrical connectionsExceeds IP66 and NEMA 4X SpecificationsVandal-resistant option available (polycarbonate)ORDERING INFORMATIONPlease consult the part number guide on the next page for completepart numbering information.PTZ Dome Installation MountsFor use with V1740N-M series outdoor PTZ domesV1761 Wall Mount, 10" horizontal, 1.5" NPTV1761L Wall Mount, 17" horizontal, 1.5" NPTV1762 Corner Mount, 10" horizontal, 1.5" NPTV1763 Pole Mount, 10" horizontal, 1.5" NPTV1764A Pendent Mount, 15" long vertical, 1.5" NPT, outdoorsideopeningforwiringV1764B Pendent Mount, 15" long vertical, 1.5" NPT, outdoortopopeningforwiringV1765 Parapet Mount, 12" horizontal, vertical attachment,1.5" NPTV1765A Parapet Mount, V1765 horizontal attachment adapterFor detailed information, please refer to V1760 series indoor/outdoordome mountsSD card model:V3096-4G SD card, 4GV3096-8G SD card, 8GV3096-16G SD card, 16GMinimum PC Requirements************************Windows 2000/XP operating system256 MB RAM100 MB Ethernet cardInternet Explorer 6.0 or Infinova Video Management SoftwareMOUNTINGSPECIFICATIONSGeneralOptical zoom: 18X, 22X, 23X, 26X, 35X, 36XDigital zoom: 12X (all versions)Image Stabilization: 35X zoomProgrammable Presets: Up to 128Camera Address:PE LCO-P:1~255PE LCO-D:1~254Infinova: 1~128Programmable Patterns: 4Programmable Areas: 16Spherical privacy zones: 24Video Blanking Sectors: 16Image Mirror Function: YesAuto SynchronizationLine-Locked: RemoteV-phaseadjustmentInternal: Built-insyncgeneratorIP SpecificationsVideoCoding:MPE G-4/MJPE GData Rate: 128KBit/s-4MBit/sFrame Rate: PAL: 25fps; NTSC: 30fps (max)Image Resolution:Major stream: D1/ 2CIF/ CIF/ QCIFMinorstream:CIF/QCIFVideoSize:PAL:720×576, 720×288,352×288, 176x144NTSC: 720×480, 720×240, 352×240OverallDelay: 200msNetwork Connection: 10/100 Base TNetwork Protocols: TCP/IP, HTTP, ICMP, PPPoE, DHCP, UDP,DNS, DDNS, SMTP, RTP, RTSP, SNMP etc.Alarm (optional): 2 alarm inputs, 2 relay outputsMotion detection: YesAudio (optional)Compression Standard: G.711Ports: 1input/1outputPhysicalManual Pan/Tilt Speed: 0.5° ~ 90° per second(0.5° ~ 180° per second for 35X and 36X)(basedonzoomposition)Preset Pan/Tilt Speed: 240° per second, max(200° per second (max) for 35X and 36X)PanTravel:360° continuousTiltTravel:-3° ~ 90°Pan/Tilt Accuracy: ±1° (±0.3° for 35X and 36X)Zoom/Focus Accuracy: ±0. 5%Motor: SteppingMotorMechanicalProduct Weight: 8.44 lbs. (3.82 kg)Product Dimension: 10.83"×Ф9.45" (275mm×Ф240mm)ElectricalInput Voltage: 12VDC or 24 VACPower Consumption: 12VDC: 22W24VAC: 50WPower On In-Rush Current: 12 VDC, 4 amps (max)24VAC,2amps(max)EnvironmentOperating Temperature: -40°F ~ 122°F (-40°C ~ 50°C)Fan & Heater: Continuous fan; auto-start heaterHumidity:0~90%RH(Non-condensing)Certifications FCC,CEISO 9001:2000Outdoor in-Ceiling and Bracket Mount IP PTZ Domes。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
会飞的高清摄像机派诺特推出新一代遥控四轴飞
行器AR.Drone 2.0
作者:暂无
来源:《上品Choices》 2013年第7期
派诺特是四轴飞行器的专家, AR.Drone 2.0 是新一代使用智能手机或平板电脑的 Wi-Fi 功能进行控制的高科技四
轴飞行器。
AR.Drone 2.0前端摄像头会将飞行器“看到”的图像实时传送到操控设备屏幕上。
其摄像头分辨率高达 1280x720,可以将空中俯瞰的景象以流畅清晰的图像呈现给使用者。
这个摄像头还能够识别特定的形状和颜色,将扩增实境的元
素展现在智能手机的屏幕上。
记录分享飞行体验
通过全新的 AR.FreeFlight 2.0 遥控应用程序,玩家能够记录自己的高清飞行视频和图像,存储在所使用的智能手
机或平板电脑中,然后通过YouTube分享到社区。
玩家还能够将图像或视频储存到U盘中,USB 接口隐藏在机身内部。
平板电脑完美操控
短按起飞按钮,启动四个无刷马达,AR.Drone 2.0 就会起飞。
飞行十分简单,您只需用大拇指按住屏幕的任意一边,您所按住的地方会自动形成一个控制按钮。
按住左侧按钮,AR.Drone 2.0 将根据驾驶者设备的运动而运动:当您
将平板电脑向外、向内或向左右倾斜时,AR.Drone 2.0 也会相应地向前、向后、或横向移动。
手指右键上划动,飞行
器就能够进行上升、下降或左右旋转。
派诺特拥有专利的全新“绝对控制” 模式能够帮助玩家拥有一个更加直观的操控系统。
通过 3D 地磁仪,以智能手
机作为参照点,AR.Drone 2.0 能够确认自己的精确方位。
玩家无需再担心 AR.Drone2.0 前置摄像头的方向,摄像头能
够准确地追踪智能手机的运动和倾斜。
熟练的玩家可以选择“相对飞行” 模式,即传统的飞行模式。
该模式将会关闭派诺特 AR.Drone 2.0 的地磁仪,玩
家将在无辅助状态下控制飞行器的方向。
AR.Drone 2.0 花式特技
为了让玩家享受更多的飞行乐趣和刺激性,AR.Drone 2.0 首次添加了“翻滚” 特性。
双击操控设备屏幕右侧的按钮,AR.Drone 2.0 就会自动转圈飞行。
不论是专家还是毫无经验的新手都可以成为能够表演特技的飞行员!
在任何高度都具有惊人的稳定性
AR.Drone 2.0 的中心部位装有 MEMS(微机电系统)。
一个三轴加速计、一个三轴陀螺仪、一个三轴地磁仪和一个压力传感器使派诺特 AR.Drone 2.0 具有惊人的稳定性。
其它部件包括:2 个超声波传感器,能够分析高达 6 米的飞
行高度。
1个压力传感器使设备功能完备,提供出色的垂直稳定性。
4个旋翼叶片,专为 AR.Drone 2.0 设计,使其能
够进行平稳飞行。
2种机壳适用不同飞行环境
派诺特AR.Drone 2.0 有两种机壳,各自具有特别设计的轮廓。
机壳由EPP(用于设计汽车减震器的材料)制成,轻便、坚固,有效保护飞行器。
最后,位于起落架上的LED 灯(前绿后红)能够帮助玩家追踪AR.Drone 2.0 的方向,更加便于飞行。
开放的开发平台。