过程控制工程Lecture-17(CP17)_outline
过程控制工程名词解释
过程控制工程名词解释过程控制:针对温度、压力(差压)、流量、液位(物位)、成分和物性等过程参数的控制。
(P13)系统:实现某一目标的完整体系,将环境对它的影响和它对环境的影响分离出来。
被控对象(过程):被控制的生产设备或装置。
被控过程既包括运行中的设备与生产关系,也反映其输入输出动态关系。
(P3)测量变送器:用于测量被控变量,并按一定的规律将其转换为标准信号作为输出。
执行器:常用的是控制阀。
它接受来自控制器的命令信号u,用于自动改变控制阀的开度。
控制器(调节器):它将被控变量的测量值与设定值进行比较,得出偏差信号e(t),并按一定的规律给出控制信号u(t)。
被控变量(受控变量、过程变量):被控对象需要维持在其理想值的工艺变量。
(P4)等于工艺介质加工艺部位加工艺参数。
设定值(给定值):被控变量要求达到的期望值。
控制变量:控制器的输出电信号。
操作变量(操纵变量):通常是指由执行器控制的某一工艺变量。
扰动变量:任何导致被控变量偏离其设定值的输入变量。
广义对象:为了简化控制系统的分析和设计,常把执行机构、被控对象和测量变送环节合并起来考虑,作为一个广义对象。
(P38)正反作用:当被控变量的测量值增大时,控制器的输出也增大,则该控制器为“正作用”;否则,当测量值增大时,控制器输出反而减少,则该控制器为“反作用”。
串级控制:一个控制器的输出用来改变另一个控制器的设定值。
(P86)主控制器:接受主变量的误差,输出到副控制器设定值的控制器。
副控制器:接受副变量的误差,输出到执行机构的控制器。
(液位)均匀控制(平均液位控制):控制目标是使操作变量(如储罐输出流量)尽可能平缓,以减少对下游装置的干扰,而允许贮罐液位在上下限之间波动。
积分饱和:当调节能力不足时,控制器内部状态超出正常工作范围。
而当主要干扰消除后,控制器内部状态首先需要返回至正常工作范围,然后控制器才真正开始起调节作用。
不完全微分PID:由于微分对高频噪声有放大作用,所以在具体实现时一般不用理想微分,而是在PID算式中加一个一阶低通滤波器(惯性环节)。
过程控制讲义课件(全套)
29
1.4 过程控制系统的分类
6. 按给定信号的特点分类 : 定值控制系统 程序控制系统 随动控制系统
(1)定值控制系统:就是系统被控量的给定值保持在规定 值不变,或在小范围附近不变。定值控制系统是过程控 制中应用最多的一种控制系统,因为在工业生产过程中 大多要求系统被控量的给定值保持在某一定值,或在某 很小范围内不变。 例如过热蒸汽温度控制系统、转炉供氧量控制系统 均为一个定值控制系统。
30
1.4 过程控制系统的分类
(2)程序控制系统:它是被控量的给定值按预定的时 间程序变化工作的。控制的目的就是使系统被控量按 工艺要求规定的程序自动变化。 例如同期作业的加热设备(机械、冶金工业中的热 处理炉),一般工艺要求加热升温、保温和逐次降温 等程序,给定值就按此程序自动地变化,控制系统按 此给定程序自动工作,达到程序控制的目的。
4. 按被控制量的多少分类:
单变量控制系统 多变量控制系统
25
1.4 过程控制系统的分类
5. 按系统的结构分类:
反馈控制系统 前馈控制系统 复合控制系统 单回路控制系统 串级控制系统
26
1.4 过程控制系统的分类
(1)反馈控制系统
它是过程控制系统中的一种最基本的控制结构形 式。反馈控制系统是根据系统被控量的偏差进行工作 的,偏差值是控制的依据,最后达到消除或减小偏差 的目的。如过热蒸汽温度控制系统就是一个反馈控制 系统。另外,反馈信号也可能有多个,从而可以构成 多个闭合回路,称其为多回路控制系统。
23
1.4 过程控制系统的分类
1. 按被控量分类 :
温度控制系统 压力控制系统 流量控制系统 液位控制系统等
2. 按完成的功能分类:
《过程控制》课件

感谢观看
THANKS
通过精确控制冶金过程中的各种参数,实现 高效、低耗、高质量的冶金生产。
详细描述
在冶金过程中,自动化控制系统通过对熔炼 、连铸、轧制等环节的温度、压力、流量、 成分等参数的监测和调节,实现高效、低耗 、高质量的生产。这有助于提高冶金产品的 质量和降低生产成本。
电力过程控制实例
总结词
通过自动化技术实现对电力生产过程的控制 ,确保电力供应的稳定和安全。
工业4.0与过程控制的融合发展
总结词
工业4.0强调的是数字化、智能化和互联化,与过程控制技术的融合将推动工业生产的进一步升级。
详细描述
工业4.0通过物联网、边缘计算等技术,实现设备间的互联互通和数据共享,为过程控制提供了更广阔的应用场 景。同时,工业4.0也促进了生产过程的自动化和智能化,提高了生产效率和产品质量。
工业网络与安全问题挑战
工业网络安全挑战
随着工业自动化和信息化的发展,工业控制系统越来 越多地通过网络进行数据交换和远程控制,这使得工 业控制系统面临网络安全威胁和攻击的挑战。
数据安全挑战
工业控制系统中的数据涉及到企业的核心机密和生产 安全,一旦泄露或被篡改,将给企业带来巨大的经济 损失和安全风险。
要点二
稳定性挑战
在某些情况下,控制系统可能受到外部干扰或内部参数变 化的影响,导致系统稳定性下降,甚至出现振荡或发散。
复杂过程与非线性系统挑战
复杂过程挑战
许多实际的过程控制系统具有非线性、时变、不确定性 和耦合等特性,这使得对系统的建模和战
非线性系统在控制过程中表现出复杂的动态行为,如跳 跃、分岔和混沌等,这使得传统的线性控制方法难以应 对。
化工过程控制实例
总结词
过程控制process control教程讲解讲义
样本数量 &检验频次 ;
谁?在那里?用什么来检验;
控制的类型等
B/C类控制方法的效果反映在哪个数字上?
27/41
探测度分数评分参照表
等级 10 9 8 7 6 5 4 探测性 标准 探测工具方式 推荐的探测方法 不能检测出或没有进行检测 只能通过间接或随机检测 几乎不可能 肯定不可能检测出 很微小 微小 很小 小 中等 中上 控制方法可能检测不出
10/41
过程定义:过程流程图实例
11/41
过程定义:过程流程图
1. 产品实现的过程/活动
2. 期望的结果/输出 3. 输入源的变差
4. 随时间变化的过程参数
5. 过程/活动的顺序
12/41
识别工序/活动
如果某工位包含多个连续的操作动作,是作为一个活动 来分析,还是分为几个子活动? 举例:
过程控制系统模型的介绍 过程控制的子模块
3/41
过程控制在APQP中的体现
APQP的五个阶段
计划和确定项目 产品设计和开发 过程设计和开发 产品和过程验证 反馈,评估和纠正措施 任务7:流程图 任务12:PFMEA 任务13:控制计划 ……
4/41
GM Global APQP要求
机器设备/工艺; 加工辅料; 人员操作的方法; 工装夹具; 环境。
16/41
显示过程/活动的顺序
用图例将过程/活动按照顺序显示出来;
图例要符合SGM的规定;
组织熟悉此过程的相关人员否有重复现象? 是否有毫无价值的工序/活动? 是否有经常出错的工序/活动? 是否可以合并某一些工序/活动? 是否可以优化某些工序/活动的顺序? 是否还有改进的空间?
过程控制工程主要内容

过程控制工程主要内容过程控制工程是一门涉及工业系统自动化控制的学科,主要研究如何通过对系统的输入、输出和内部状态进行监测和调节,实现对工业过程的精确控制。
本文将从以下几个方面介绍过程控制工程的主要内容。
一、工业过程控制的基本概念工业过程是指在工业生产中涉及的物质和能量的转化过程,如化工生产、电力系统、冶金工艺等。
过程控制工程就是通过对这些工业过程进行监测和调节,使其达到预期的目标。
过程控制工程包括对过程的建模、系统辨识、控制策略设计和控制器实施等内容。
二、过程建模与系统辨识过程建模是指对工业过程的动态特性进行描述和表示,以便进行控制系统设计和性能分析。
常用的建模方法有传递函数模型、状态空间模型和时间序列模型等。
系统辨识是指通过对过程的输入和输出数据进行分析和处理,推导出过程的数学模型。
常用的系统辨识方法有参数辨识和非参数辨识等。
三、控制策略设计控制策略设计是指根据过程的特点和要求,确定控制系统的结构和参数,以实现对过程的控制。
常见的控制策略包括比例-积分-微分(PID)控制、模糊控制、自适应控制和预测控制等。
控制策略设计需要考虑过程的稳定性、响应速度、抗干扰能力和鲁棒性等因素。
四、控制器实施与调试控制器实施是指将设计好的控制策略实现为硬件或软件,并与过程进行实时连接和数据交互。
硬件控制器通常采用可编程逻辑控制器(PLC)或单片机等;软件控制器则通过计算机软件实现。
控制器的调试是指对实施后的控制系统进行测试和优化,确保其能够正常运行并满足性能要求。
五、过程优化与故障诊断过程优化是指通过对过程的数据进行分析和优化,提高过程的效率和质量。
常用的优化方法有模型预测控制、遗传算法和人工智能等。
故障诊断是指通过对过程的异常数据进行分析和判断,确定过程是否存在故障,并尽快找出故障原因。
常用的故障诊断方法有故障树分析、故障模式与效应分析和专家系统等。
六、安全与可靠性分析过程控制工程还包括对过程的安全性和可靠性进行分析和评估。
lecture17
-0.5, -0.5
-K, -K
-K, -K
-K, -K
11
73-347 Game Theory--Lecture 17
Find subgame perfect Nash equilibria: backward induction
Player 1 L Player 2 L’ 3 R’ 3 R” L” R” L” L’
are available? What do players know when they move? Players’ payoffs are determined by their choices. All these are common knowledge among the players.
June 12, 2003 73-347 Game Theory--Lecture 17 4
Dynamic games of complete information
Perfect information
A
player knows Who has made What choices when she has an opportunity to make a choice player may not know exactly Who has made What choices when she has an opportunity to make a choice.
73-347 Game Theory--Lecture 17 7
Perfect information and imperfect information
A dynamic game in which every information
过程控制工程课件
Δpl
p2-ap1
÷
教学进程
15.3.2 防喘振控制系统
(2) 可变极限流量
出入口压力与入口流量的关系 不同形式的变换,组成防喘振控制系统。
流体:液体或气体 液体传送——泵 气体传送——风机或压缩机
控制目标:流量、压力控制,安全保护控制
教学进程
15.2 泵和压缩机的控制
15.2.1离心泵的控制
离心泵的叶轮在电动机的带 动下做高速旋转运动,产生离心力。
泵速越高,离心力越大,出口压 头越高。 出口流量增大,出口压力降低。
离心泵特性公式:
H R1n2 R2Q2
■ 性能 流量Q 140~1800m3/h 扬程H 9~125m 进口直径 150~600mm
教学进程
15.2 泵和压缩机的控制
15.2.1离心泵的控制 离心泵特性曲线
压头H
a
n4 n3 n2 n1
a
排出量Q 另外,管路系统的压力也对泵的特性有影响
教学进程
15.2.1 离心泵的控制
管路阻力: (1)管路两端的静压差hp (2)管路两端的静液柱高度,即升扬高度hL (3)管路的摩擦损失hf (4)控制阀两端的节流损失hv
极限线方程 几种常见的操作线方程
p2/p1
Q2
p2 a b Q12
p1
T1
p2 p1
a0
a1Q1
a2Q12
H 多变 Q12
p2 a b K 2 • p1
p1
r p1
教学进程
15.3.2 防喘振控制系统
(2) 可变极限流量
出入口压力与入口流量的关系
不同形式的变换,组成防喘振控制系统。
●场合: 常用,但排量小于正常排量的30%时要调整
过程控制工程第三版教学大纲

过程控制工程第三版教学大纲一、背景和介绍过程控制工程是一门涉及控制和监测工业过程的学科。
过程控制工程在化工、石油和制造业等领域广泛应用,是工业自动化中不可或缺的一部分。
本课程旨在为学生提供必要的知识和技能,以便他们在未来的职业生涯中成为过程控制工程师。
二、课程目标本课程的学习目标如下: - 理解过程控制工程的基本概念和原理,包括传感器、控制器、执行器等的使用。
- 学习如何设计和实现一个简单的过程控制系统,包括信号处理、模型建立和控制算法的应用。
- 掌握常见的控制策略,包括PID控制、模型预测控制、最优控制等,并了解如何选择和使用不同的控制策略。
- 学习如何使用计算机进行过程控制系统的建模和仿真。
- 掌握过程控制系统的调试和维护方法。
三、课程详细内容本课程的内容如下所述:第一章:控制系统概述•引言和概述•控制系统的基本要素•控制系统的分类•控制系统的性能指标第二章:传感器和执行器•传感器的基本原理和分类•信号处理和传输•执行器的基本原理和分类•报警和安全切断装置第三章:控制器•控制器的基本原理和分类•PID控制器及其参数调节•其他控制策略:模型预测控制、最优控制等•控制器的调试和维护第四章:过程建模和控制算法•过程建模的基本原理和方法•基于模型的控制算法•现场控制和优化第五章:计算机控制系统•实时控制系统概述•实时控制系统的硬件和软件•实时控制系统的设计与实现•实时控制系统的调试和维护四、教学方法和评估本课程的教学方法包括讲授、实验和综合性设计任务。
课堂讲授将介绍过程控制工程的基本知识和技能,实验和综合性设计任务将帮助学生巩固和应用所学知识。
评估方式包括平时成绩、考试和综合性设计任务。
五、参考书目•史密斯,卡尔. 过程控制工程[M]. 机械工业出版社, 2005.•埃尔曼. 过程控制[M]. 科学出版社, 2011.•陈学林, 王福梅. 控制工程实验教程[M]. 电子工业出版社, 2009.六、结论过程控制工程是工业自动化中不可或缺的一部分。
过程控制工程英文字典

过程控制工程英文字典
1. Automation(自动化): 指的是利用各种控制系统和设备来
实现自动化操作和监控过程的技术。
2. Control system(控制系统): 是用来管理、指导和调节工
业过程或设备的系统,通常包括传感器、控制器和执行器等组件。
3. Feedback(反馈): 在控制系统中,指的是将输出信号再次
输入到系统中以调节和修正系统的行为的过程。
4. Process variable(过程变量): 是指在工业过程中需要监
控和控制的物理量,比如温度、压力、流量等。
5. PID controller(PID控制器): 是一种常见的控制器类型,利用比例、积分和微分三个控制参数来调节系统的输出,以实现对
过程的精确控制。
6. HMI (Human-Machine Interface,人机界面): 是指人和机
器之间进行信息交流和交互的界面,通常用来监视和操纵工业过程。
7. SCADA (Supervisory Control and Data Acquisition,监
控与数据采集系统): 是一种用于监控、控制和数据采集的系统,常
用于工业生产过程中。
8. PLC (Programmable Logic Controller,可编程逻辑控制器): 是一种用于控制自动化设备和工业生产过程的数字计算机系统。
以上是一些常见的过程控制工程英文字典条目,希望能帮助到你。
过程控制工程

《过程控制工程》课程设计学院:物联网工程学院班级:自动化1104姓名:学号:********指导老师:***成绩:某加热炉的数学模型为1507()3201s G s e s -=+,试设计大时延控制系统,具体要求如下:(1) 仿真分析以下控制方案对系统性能的影响:PID 、微分先行、中间微分、Smith 预估、增益自适应预估;给出相应的闭环控制系统原理图;(2) 在不同控制方式下进行仿真实验,比较系统的跟踪性能和抗干扰性能;(3) 选择一种较为理想的控制方案进行设计,包括调节阀的选择、控制器参数整定。
一.大延迟系统方案一PID1、参数设定P :0.48 I :0 D :02、控制方案图如下:运行结果如下:其中:超调量δ=(1.5-0.8)/0.8=0.875 峰值时间tp=370s 过渡时间tr=250s余差e (∞)=1-0.8=0.2第一个波峰值1.5 第二个波峰值 1 衰减比1.5/1=1.5 振荡频率f=1/T=1/650=0.0015HZ 3、外加扰动的控制方案如图如图,我们在5000s 时外加一个幅值为5的干扰信号:Transport Delay7320s+1Transfer FcnStepSignal 3Signal BuilderScopePIDPID Controller Add运行结果如下:其中:超调量δ=(1.5-0.8)/0.8=0.875峰值时间tp=370s过渡时间tr=250s余差e(∞)=1-0.8=0.2第一个波峰值1.5 第二个波峰值1 衰减比1.5/1=1.5振荡频率f=1/T=1/650=0.0015HZ由上图可知此方案抗干扰性能一般。
4、加入可变输入后观察随动性能的控制系统图运行结果如图:其中:超调量δ=(1.25-0.6)/0.6=1.08峰值时间tp=350s过渡时间tr=220s余差e(∞)=1-0.6=0.4第一个波峰值1.25 第二个波峰值1.1 衰减比1.25/1.1=1.14振荡频率f=1/T=1/500=0.002HZ由上图可知此方案的跟踪性能一般。
过程控制工程1
过程控制工程11. 简介过程控制工程(Process Control Engineering)是一门涉及工程控制和自动化的学科,它应用于各种过程工业领域,包括化工、石油、能源、制药和食品等。
过程控制工程的目标是通过监测、调整和控制工艺过程的各个参数,以实现稳定、高效、安全的工业生产。
2. 过程控制工程的基本原理与方法2.1 过程控制的基本原理过程控制的基本原理是基于反馈控制系统的概念。
它通过测量工艺过程中的各个参数,并将这些参数与设定值进行比较,然后计算出误差,并通过控制器来调整控制系统的输出,以使误差减小,最终使过程达到稳态或稳定。
2.2 过程控制的基本方法过程控制的基本方法包括以下几种: - 动态过程建模和仿真:通过建立数学模型来描述和预测过程的动态行为,并通过仿真来研究和优化控制策略。
- 控制系统设计:根据过程的控制要求和性能指标,设计合适的控制系统结构和参数。
- 传感器和执行器选择:选择适当的传感器和执行器,以实时监测和调节过程的参数。
- 控制算法选择:选择合适的控制算法,如PID控制、模型预测控制等,以实现对过程的良好控制。
- 控制系统实施与调试:根据控制系统的设计和算法,实施控制系统,并进行调试和优化。
- 控制系统维护与优化:对控制系统进行维护和优化,以确保其长期稳定运行并达到最佳控制效果。
3. 过程控制工程的应用案例过程控制工程在各个行业中都有广泛的应用。
以下是几个典型的应用案例:3.1 化工行业在化工行业中,过程控制工程被用于控制和调节化工过程中的温度、压力、流量和浓度等参数,以实现产品质量的稳定和工艺流程的安全运行。
在石油行业中,过程控制工程被用于石油开采、炼油和储存等过程的控制和优化,以提高石油生产和加工的效率,并确保操作的安全性。
3.3 能源行业在能源行业中,过程控制工程被用于电力、水电和核电等发电系统的控制和监控,以实现电力的可靠供应和能源资源的高效利用。
在制药行业中,过程控制工程被用于制药过程中的药品生产和质量控制,以确保药品的安全性和有效性。
《过程控制》
《过程控制》课程笔记第一章概论一、过程控制系统组成与分类1. 过程控制系统的基本组成过程控制系统主要由被控对象、控制器、执行器、检测仪表四个部分组成。
(1)被控对象:指生产过程中的各种设备、机器、容器等,它们是生产过程中需要控制的主要对象。
被控对象具有各种不同的特性,如线性、非线性、时变性等。
(2)控制器:控制器是过程控制系统的核心部分,它根据给定的控制策略,对检测仪表的信号进行处理,生成控制信号,驱动执行器动作,从而实现对被控对象的控制。
控制器的设计和选择直接影响控制效果。
(3)执行器:执行器是控制器与被控对象之间的桥梁,它接收控制器的信号,调节阀门的开度或者调节电机转速,从而实现对被控对象的控制。
执行器的响应速度和精度对控制系统的性能有很大影响。
(4)检测仪表:检测仪表用于实时测量被控对象的各项参数,如温度、压力、流量等,并将这些参数转换为电信号,传输给控制器。
检测仪表的准确性和灵敏度对控制系统的性能同样重要。
2. 过程控制系统的分类根据控制系统的结构特点,过程控制系统可以分为两大类:开环控制系统和闭环控制系统。
(1)开环控制系统:开环控制系统没有反馈环节,控制器根据给定的控制策略,直接生成控制信号,驱动执行器动作。
开环控制系统的优点是结构简单,成本低,但缺点是控制精度较低,容易受到外部干扰。
(2)闭环控制系统:闭环控制系统具有反馈环节,控制器根据检测仪表的信号,实时调整控制策略,生成控制信号,驱动执行器动作。
闭环控制系统的优点是控制精度高,抗干扰能力强,但缺点是结构复杂,成本较高。
二、过程控制系统性能指标1. 稳态误差:稳态误差是指系统在稳态时,输出值与设定值之间的差值。
稳态误差越小,表示系统的控制精度越高。
稳态误差可以通过调整控制器的参数来减小。
2. 动态性能:动态性能是指系统在过渡过程中,输出值随时间的变化规律。
动态性能指标包括上升时间、调整时间、超调量等。
动态性能的好坏直接影响到系统的响应速度和稳定性。
过程控制16讲
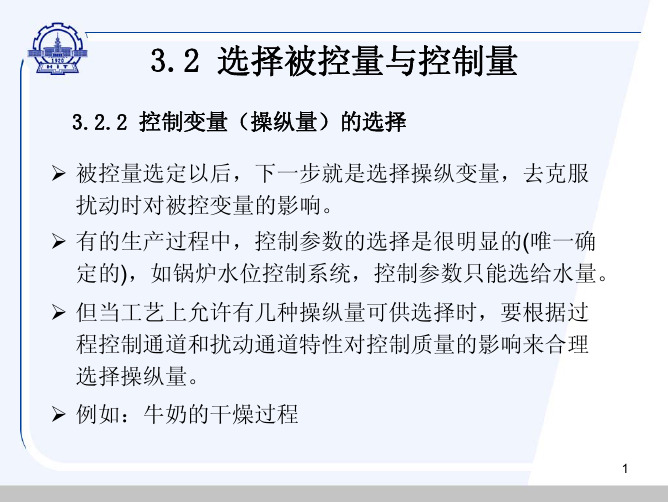
3.2 选择被控量与控制量
乳液 被控量:奶粉水含量 温度 干燥 空气 奶粉
热气
牛奶的干燥过程流程图
控制量?
2
3.2 选择被控量与控制量
¾ 控制通道:操纵量对被控量作用的通道。 ¾ 扰动通道:扰动量对被控量作用的通道。 ¾ 控制通道放大系数K0:被控变量的变化量与操纵变量 的变化量在时间趋于无穷大时之比 。 ¾ 扰动通道放大系数Kf:过程受到阶跃扰动,过程从原有 稳定值达到新的稳态时,被控量的变化量与扰动幅度之 比。
6
3.2 选择被控量与控制量
Y (∞) = lim Y (t ) =
t →∞
Kf 1+K 0 K c
¾ 因此,确定控制参数时,使控制通道的放大系数K0大 于扰动通道的放大系数Kf,是合理的。当这一要求不 能满足时,可通过调节K0的值来补偿,使K0Kc值远大 于Kf 。
7
3.2 选择被控量与控制量
3.2 选择被控量与控制量
被控量Y(s)对扰动的传函:
(T0 s + 1) K f Y (s) = F ( s ) (T0 s + 1)(Tf s + 1) + K 0 K c (Tf s + 1)
在单位阶跃扰动下:(稳态值—终值定理)
Wf ( s) Y (s) = F ( s ) 1 + Wc ( s )W0 ( s )
Y (∞) = lim Y (t )
t →∞
= lim s
s →0
K f (T0 s + 1) s[(T0 s + 1)(Tf s + 1) + K 0 K c (Tf s + 1)]
ห้องสมุดไป่ตู้
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
17.4.3 Complex control applications F FY
V
17.4.3 Control of column pressure Vapor pressure control: Most distillation column control systems assume that the tower operates at a constant pressure. When using temperature control as a substitute for composition control, pressure compensation is essential to maintain desired compositions. Typically, distillation may operate at negative pressure, normal pressure and positive pressure, respectively.
17.1 Introduction 17.2 Fundamental Models 17.3 Candidate Controlled Variables 17.4 Overall Control Schemes 17.5 Novel Control Strategies
17.1 Introduction
xD = F ( z f − xB ) + xB D z f − xB
xB = F (z f − xD ) + xD B
L D,xD F,zf V
Binary Distillation Fig.17-1 Heat carrier
LB
Bottoms, B,xB
D = F xD − xB
B F
=
x x
D D
● Direct variables — composition of products On-line composition analyzer is vert variables — operating temperature In the presence of unchanged pressure, one-to-one correspondence between the composition and the temperature is available.
KpO P T Kp T z=T-Kp+KpO (4) Inferential control
Fig.17-3
Chapter
17
17.4 Overall Control Schemes Mass balance based schemes Without quality (temperature) control P332 Fig.7-10, Fig.17-11
17.4.3 Complex control applications (1) Cascade control Temperature-steam flow cascade control Fig. 17-20 (A), (B) (2) Averaging control Level averaging control (3) Ratio control Control of ratio of reflux to feed flow, D/F (4) Feed-forward control Feed-forward control in terms of feed flow
17.2 Fundamental Models
Chapter
17
Control of Distillation Columns
j+1
L j +1 − L j + V j −1 − V j =
dM j dt
17.1 Introduction 17.2 Fundamental Models 17.3 Candidate Controlled Variables 17.4 Overall Control Schemes 17.5 Novel Control Strategies
− z − x
f B
Mass balance equations:
D/F ↑ :xB xD ↓
B/F ↑: xB xD ↑
1
17.1.1 Basic principles (2) Energy balance Degree of separation
x (1 − x B ) V = β ln D F x B (1 − x D )
17.3 Candidate Controlled Variables Pressure Compensation (1) Direct compensating
17.3 Candidate Controlled Variables (2) Temperature difference control (3) Dual temperature difference control
Distillation has extensive applications in a variety of industrial sectors, such as petrochemical, chemical and food processing plants.
17.1 Introduction Distillation is a method of separating mixtures based on differences in their volatilities in a boiling liquid mixture. Continuous distillation, Batch distillation Industrial distillation is typically performed in large, vertical cylindrical columns known as distillation towers or distillation columns with diameters ranging from about 65 centimeters to 16 meters and heights ranging from about 6 meters to 90 meters or more. MIMO systems, highly correlated variables, complexity in mechanism, slow dynamic responses, energy-intensive processes Difficult to Control
D
1. Manipulated by D Temperature increase → D Decrease → Level Increase → Temperature Decrease
F V Q B
→LIncrease
Demerits: Large lag 2. Manipulated by L
Chapter
17
Process Control Engineering
Chapter 17
2011-17 Li Hongguang Automation Department Beijing University of Chemical Technology
Control of Distillation Columns
FC
Control of Distillation Columns
17.1 Introduction 17.2 Fundamental Models 17.3 Candidate Controlled Variables 17.4 Overall Control Schemes 17.5 Novel Control Strategies
j j-1
L j +1 x j +1 − L j x j + V j −1 y j −1 − V j y j =
d[M j x j ] dt
Detailed analysis of the dynamics is given in P325-326
2
17.3 Candidate Controlled Variables Direct or indirect variables
Energy balance equations
⎛ V ⎞ s ≈ f ⎜ ⎟ ⎝ F ⎠
Level (3) Energy balance Pressure (4) Safety
Regarding specific columns, the compositions of bottoms and distillates depend on D/F and V/F .
17.1 Introduction
Coolant
17.1.1 Basic principles LD Mass balance; Energy balance (1) Mass balance F=B+D B, D: Bottom products ( bottoms) and distillate Fzf=DxD+BxB xD, xB : Light composition of bottoms and distillate
17.1.3 Disturbances
Chapter
Feed relevance ( flow, composition, temperature) Operating temperature Operating pressure
17
Control of Distillation Columns
17.1 Introduction 17.2 Fundamental Models 17.3 Candidate Controlled Variables 17.4 Overall Control Schemes 17.5 Novel Control Strategies