05自整角机(第5章)
自整角机原理和应用
控制电机5 章章第第 5自整角机5.1 自整角机概述5.2 自整角机的基本结构5.3 自整角机的工作原理和基本特点5.5 自整角机的应用举例5.4 自整角机主要性能指标和技术数据5.6 力矩式自整角机本章要求:熟练掌握控制式自整角机的工作原理及其工作特点。
掌握控制式自整角机接收机输出绕组的位置、输出绕组电势与失调角的关系。
掌握力矩式自整角机的工作特点、静态整步转矩与失调角的关系、比整步转矩等。
掌握自整角发送机与接收机成对使用的特点,了解自整角机的应用。
5.1 概概 述述自整角机是自动控制系统中的同步元件。
利用两台或多台自整角机在电路上的联系,可以使相隔一定距离、机械上互不连接的两根或多根转轴保持同步旋转或产生相同的转角变化。
与发送轴(即主动轴)耦合的自整角机称为发送机;与接收轴(即被动轴)耦合的自整角机称为接收机。
21变速器前置放大器信号处理直流放大器可控硅控制线路电源雷达雷达接收器测速发电机直流伺服电动机自整角机发送机手轮αβ功率变换器接收机自整角机按其使用要求不同,可分为控制式自整角机和力矩式自整角机。
控制式自整角接收机输出的是与两轴转角差成一定关系的电压,该电压控制交流伺服电动机去带动被动轴旋转,故能带动较大负载。
由于接收机工作在变压器状态,故通常称为自整角变压器。
力矩式接收机直接输出力矩并带动负载,但带载能力差,只能带动指针、刻度盘等轻负载,常用于角度传输精度要求不很高的指示系统中。
自整角机按结构形式不同可分为接触式和无接触式两大类。
雷达高低角自动显示系统原理图1. 自整角接收机2. 自整角发送机3. 交流伺服电动机4. 放大器5. 刻度盘6. 减速器<U~U j ~123456αβE 2雷达高低角系统是如何进行工作的?思考:自整角机工作录象控制电机θ1 ~U jZ 1 Z 2 D 1 D 2D 3 5.2 自整角机的基本结构自整角机的基本结构定子:铁心,三相对称绕组;接成Y 。
转子:铁心,单相绕组。
机械制造装备设计第五章习题答案(关慧贞)(完整资料).doc

此文档下载后即可编辑第五章机床夹具设计习题答案1.机床夹具的作用是什麽?有那些要求?(1)机床夹具的作用1)保证加工精度2)提高生产率3) 扩大机床的使用范围。
4) 减轻工人的劳动强度,保证生产安全。
(2)机床夹具的要求1)保证加工面的位置精度2) 夹具的总体方案应与年生产纲领相适应3) 安全、方便、减轻劳动强度4) 排屑顺畅5)应有良好的强度、刚度和结构工艺性。
2.机床夹具的组成有那些部分?1)定位元件及定位装置2)夹紧元件及夹紧装置3)导向及对刀元件4)动力装置5)夹具体6)其它元件及装置不同的生产条件下的夹具,其组成会有不同。
3.何谓六点定位原理“何谓定位的正常情况和非正常情况,它们各包括那些方面?(1)六点定位原理是采用六个按一定规则布置的约束点,限制工件的六个自由度,使工件实现完全定位。
(2)定位的非正常情况是指凡是保证加工位置精度的自由度均已被约束所限制的情况,它可以是完全定位,即限制了六个自由度,也可以是小于六个约束点。
(3)定位的非正常情况包括欠定位和过定位两种。
欠定位是指保证加工精度的某自由度应该被限制而没有被限制的情况。
此情况不能保证加工精度,因此此定位方案是绝对不允许的。
过定位是指为保证加工精度应该被限制的某个自由度被两个或两个以上的约束所重复限制。
一般情况下这是不允许的。
但在工件定位和定位元件精度很高或者在工件刚度很低的情况下,过定位的情况是被允许的。
4.试分析图5-7中a、c方案为什麽属过定位?如何改进的?尚存在什麽问题?5.7过定位及其改进图5.7 a):工件下底面有俩个短圆柱销台阶面支撑,为平面约束,限制3个自由度,而每个短圆柱销插入工件孔内,限制了2个自由度,因此共限制了7个自由度,超出了6个,即y方向的移动自由度被重复限制了,因此属于过定位。
C):工件左端由销的又台阶端面定位,此端面限制了3个自由度,而销的长径比已超过1,属于长销,它限制了4个自由度,共限制了7个自由度,还有转动的自由度没有被限制。
第5章-自整角机(力矩式自整角机讲)
失调角也是随动系统中常用术语之一)。 由图 5 - 18 明
显可见δ=90°-γ, 代入式(5 - 11)得
第5章 自整角机
E2=E2max cos(90°-γ)=E2max sinγ
(5 - 12)
上式说明自整角机变压器 (ZKB)的输出电势与失调 角γ的正弦成正比, 其相应曲线形状如图 5 - 21 所示。 图上若在0°<γ<90°的范围内, 失调角γ增加输出电势 E2也增大; 若90°<γ<180° 时, 输出电势E2将随失调 角 γ增大而减小; γ=180°时 , 输出电势E2 又变为零。 但是, 当失调角γ变负时, 输出电势E2的相位将变反。
也就是失调同样的角度所获得的信号电压大, 因此系统
的灵敏度就高。
第5章 自整角机
图 5 - 23 输出电压在γ=0时的切线
第5章 自整角机
5.4 带有“ZKC”的控制式自整角机
自整角机除了作成对 (ZKF 和 ZKB) 运行外 , 还可在 ZKF 和 ZKB 之间再接入控制式差动发送机即 ZKC 作控 制式运行。 其目的是用来传递两个发送轴的角度和或 角度差。 第 5.2 节已说明差动式自整角机的结构特点: 转子采用隐极式结构, 而且转子铁心的槽中放置有三相 对称分布绕组, 并通过三组集电环和电刷引出, 参考图 5 - 9; 定子和普通自整角机完全相同, 属三相对称绕组, 参考图 5 - 7(a)和图 5- 8。
第5章 自整角机
(4) ZKB的输出电势的有效值E2=E2max sinγ, 其中γ叫
失调角。 失调角γ=90°-δ,γ角 是实际ZKB转子绕组轴 线(从Z2′到Z1′方向)偏移(超前)协调位置( 方向)的角 X t 度(取正号)(图 5 - 20 所示)。 协调位置为输出电势等于 零的位置。 在失调角比较小时, U 2=U 2max γ, 这里γ的 单位取弧度(rad)。
位置随动系统

第5章 位置随动系统
5.1 位置随动系统概述
Motion Control System
位置随动系统又称伺服系统 主要解决的问题:对象的位置控制 根本任务:实现执行机构对位置指令的准确
跟踪。 给定量和被控量:位移(角位移、直线位移) 特点:给定量是随机变化
第5章 位置随动系统
5.1.1 位置随动系统主要应用
Motion Control System
绝对式编码器是一种旋转式检测装置,可直接把 被测转角用数字代码表示出来,且每一个角度位置均 有其对应的测量代码,它能表示绝对位置,没有累积 误差,电源切除后,位置信息不丢失,仍能读出转动 角度。绝对式编码器有光电式、接触式和电磁式三种, 以接触式四位绝对编码器为例来说明其工作原理。
第5章 位置随动系统
Motion Control System
(1)数字式位置随动系统的一般组成
位置 给定
控制计 算机
驱动器
驱动 电机
速度反馈
齿轮传 动链
系统 负载 输出
位置反馈 数字式位置随动系统一般结构框图
第5章 位置随动系统
Motion Control System源自(2)位置随动系统与调速系统的比较
第5章 位置随动系统
Motion Control System
5.3 位置随动系统中的位置检测装置(教材P220)
作用: 将位移转换成一定形式的电量。
常用的模拟式位置检测装置: 自整角机、旋转变压器、感应同步机
常用的数字式位置检测装置: 光栅(位移检测)、 光电编码盘(角度检测)
第5章 位置随动系统
第5章 位置随动系统
Motion Control System
0
自整角机与旋变
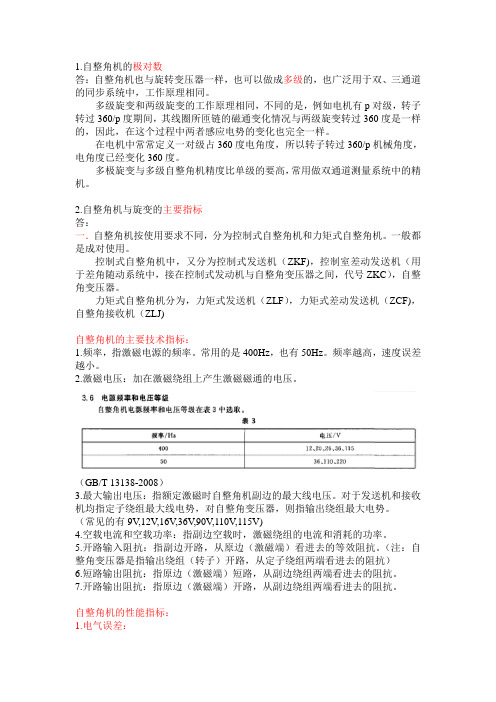
1.自整角机的极对数答:自整角机也与旋转变压器一样,也可以做成多级的,也广泛用于双、三通道的同步系统中,工作原理相同。
多级旋变和两级旋变的工作原理相同,不同的是,例如电机有p对级,转子转过360/p度期间,其线圈所匝链的磁通变化情况与两级旋变转过360度是一样的,因此,在这个过程中两者感应电势的变化也完全一样。
在电机中常常定义一对级占360度电角度,所以转子转过360/p机械角度,电角度已经变化360度。
多极旋变与多级自整角机精度比单级的要高,常用做双通道测量系统中的精机。
2.自整角机与旋变的主要指标答:一.自整角机按使用要求不同,分为控制式自整角机和力矩式自整角机。
一般都是成对使用。
控制式自整角机中,又分为控制式发送机(ZKF),控制室差动发送机(用于差角随动系统中,接在控制式发动机与自整角变压器之间,代号ZKC),自整角变压器。
力矩式自整角机分为,力矩式发送机(ZLF),力矩式差动发送机(ZCF),自整角接收机(ZLJ)自整角机的主要技术指标:1.频率,指激磁电源的频率。
常用的是400Hz,也有50Hz。
频率越高,速度误差越小。
2.激磁电压:加在激磁绕组上产生激磁磁通的电压。
(GB/T 13138-2008)3.最大输出电压:指额定激磁时自整角机副边的最大线电压。
对于发送机和接收机均指定子绕组最大线电势,对自整角变压器,则指输出绕组最大电势。
(常见的有9V,12V,16V,36V,90V,110V,115V)4.空载电流和空载功率:指副边空载时,激磁绕组的电流和消耗的功率。
5.开路输入阻抗:指副边开路,从原边(激磁端)看进去的等效阻抗。
(注:自整角变压器是指输出绕组(转子)开路,从定子绕组两端看进去的阻抗)6.短路输出阻抗:指原边(激磁端)短路,从副边绕组两端看进去的阻抗。
7.开路输出阻抗:指原边(激磁端)开路,从副边绕组两端看进去的阻抗。
自整角机的性能指标:1.电气误差:来源:工艺、结构、材料方面的因素使得理论分析条件与实际有差别(详见书P94)测定:用一台精度为零级的自整角发送机,被测自整角机当自整角变压器,放到精密分度盘上,发送机从0度开始每次转过15度,转动分度盘使输出电压最小,理论上每次变压器也转过15度,实际上转过的度数与15度的差值即是每一次的误差值,一共得到24个误差值。
自整角机

第5章 自整角机
5.1 自整角机的类型和用途 5.2 自整角机的基本结构 5.3 控制式自整角机的工作原理 5.5 力矩式自整角机的运行 5.6 自整角机的选用和技术数据 思考题与习题
第七章 自整角机
5.1 自整角机的类型和用途
自整角机属于自动控制系统中的测位用微特电机。 自
整角机若按使用要求不同可分为力矩式自整角机和控制式自
式中,E2max为ZKB输出绕组感应电势的最大值,由于励磁 电压Uf一般为固定值, E2max为一常数。
第七章 自整角机
协调位置: 随动系统常用到协调位置这一术语。 规定输出电势E2为零时的转子绕组轴线为控制式自 整角机的协调位置。即图5-20中落后ZKB定子合成磁场 B / 90o的位置为协调位置(用 X t 相量表示)。
第七章 自整角机
以上所分析的内容就是控制式自整角机的工作原 理。 简单归纳如下: (1) ZKF的转子绕组产生的励磁磁场是一个脉振磁 场, 它在发送机定子绕组中感应变压器电势。 定子各 相电势时间上同相位, 其有效值与定、 转子间的相对 位置有关。 (2) ZKF定子合成磁场的轴线与转子励磁磁场的轴 线重合, 但方向恰好相反。 (3) ZKF和ZKB的定子三相绕组对应联接, 两机定子 绕组的相电流大小相等、 方向相反, 因而两机定子合 成磁场相对自己定子绕组位置的方向也应相反。
D′2, D′3对应联接, 被称为同步绕组或整步绕组。
记住
第七章 自整角机
记住 ZKF的转子绕组Z1, Z2端接交流电压Uf 产生励磁 磁通密度, 故称之为励磁绕组; ZKB的转子绕组 通过Z′1, Z′2端输出感应电势E0, 故被称之为输出绕
组。
为便于分析起见, ZKF的转子单相绕组(励磁
自整角机

在a相整步绕组回路中,电流的有效值Ia应为两台自整 角机的感应电势的有效值的差值与a相整步绕组回路阻
抗2Za的比值,按图5-2的参考方向,有:
Ia
E2a E1a 2Za
(5-2)
式中,E2a —— 接收机感应电势的有效值;
E1a—— 发送机感应电势的有效值;
Za—— a相整步绕组的阻抗。
根据和旋转变压器类似的分析,E2a这个感应电动势来源 于接收机励磁绕组磁场的变化。具体大小取决于接收机a
转子凸极式结构力矩式自整角机可以在定子铁心上放 置三相整步绕组,转子凸极式铁心上放置单相励磁绕 组,并由两组滑环和电刷引出,滑环和电刷数目较少, 因此故障率较低,在实际中得到了广泛的采用。工作 时,励磁绕组接入单相交流电源励磁。
5.1.2 力矩式自整角机的工作原理
假定各相整 步绕组参数
~ θ1
力矩式自整角发送机和接收机大都是采用两极的凸极式结 构。选用两极电机是为了保证在整个圆周范围内有唯一的 转子对应位置,从而达到准确指示。只有在频率较高而尺 寸又较大的力矩式自整角机中才采用隐极式结构。
力矩式自整角机的结构
凸极式结构又可分为转子凸极式结构和定子凸极式结 构两种。定子凸极式结构要求将单相励磁绕组放置在 定子凸极铁心上,三相整步绕组放置在转子隐极铁心 上,并由三组滑环和电刷引出,滑环和电刷数目太多, 易出故障,较少采用。
θ =θ1 -θ2
(5-1)
自整角机的整步绕组为星形连接,图中特意画出中线,
是为了分析方便,实际应用中并没有接这条线。由于
中线的存在,在两台自整角机之间就构成了三个回路。
它们分别是a相整步绕组回路,b相整步绕组回路,c相
整步绕组回路。
力矩式自整角机的工作原理
第5章 自整角机-4

=0
第五章 自整角机
控制电机 (Control Electrical Machine)
因此,定子三相合成磁场为
B Bx B y Bx 3 Bm sin t 2
ic 2I c sin t
隙上降落的磁势相同——两
N c ic H dl Fm
l
段气隙上的磁压降相同,均 为Fm/2
注:自整角机转子交流电频
率为400Hz或50Hz
第五章 自整角机
控制电机 (Control Electrical Machine)
t
2
0
ic 2I c
B1x B1 cos1 B2 x B2 cos(1 120 ) B3 x B3 cos(1 240 )
B1 y B1 sin 1 B2 y B2 sin(1 120 ) B3 y B3 sin(1 240 )
保持相同的转角变化,或同步旋转。电机的这种性能称为自整步特性。
在伺服系统中,产生信号一方所用的自整角机称为发送机,接收信号一 方所用自整角机称为接收机。自整角机广泛应用于冶金、航海等位置和 方位同步指示系统和火炮、雷达等伺服系统中。
第五章 自整角机
控制电机 (Control Electrical Machine)
Introduction
As a circuit element, the selsynchro is essentially a variable-
coupling transformer. The magnitude of the magnetic coupling
自整角机

线路
线路
荷密度
▪ 配电网负荷特性
▪ 配电网负荷预 测
▪ 环网开关 柜
▪ 配电小间
▪ 柱上配电台
▪ 站用配电柜
▪ 专用低压 接线
▪ 低压电器
▪ 熔断器
▪ 跌落式熔断器
▪ 真空熔断 器
▪ 限流式熔 断器
▪ 喷射式熔断器
▪ 六氟化硫熔断 器
▪ 电阻器
▪ 变阻器
▪ 接触器
▪ 控制器
▪ 主令开关
▪ 无触点开 关
控制式自整角机
控制式自整角发送机结构与力矩式自整角机相似。为了提高输入阻抗, 所用激磁绕组匝数较多。控制式自整角接收机(自整角变压器)多采用 隐极式结构,并在转子上装设高精度的正弦绕组。两台控制式自整角机 与力矩式自整角机相似可组成角度测量系统,也可以有差动工作方式。 由于生产工艺方面的原因,自整角机有零位和角度等方面的误差。
目录
1分类 1.1 力矩式自整角机 1.2 控制式自整角机
2应用
1分类
自整角机按用途分为力矩式和控制式(变压器式)两种。力矩式用于同步 指示系统;控制式用作测角元件。[1]
力矩式自整角机
大多数采用两极凸极式结构,只在频率较高、尺寸较大时才采用隐极式 结构(图1)。定、转子铁芯上分别装嵌单相激磁绕组和三相整步绕 组。三相整步绕组为分布式星形接线,各相轴心线在空间相差120°。转子 绕组通过滑环和电刷引出接线的为接触式自整角机;通过电磁耦合方法 引出接线的为无接触式自整角机,后者无接触摩擦和无线电干扰,但结 构复杂,性能指标和利用率低。用两台相同型号的力矩式自整角机可组 成角度同步指示系统。其中一台为发送机,另一台为接收机(图2)。二 者用同一电源激磁。整步绕组各相对应相接。当主令轴带动发送机转过 角度为θ1,接收机所处位置为θ2角时,发送机整步绕组的各相感应电势 为 Ea=Ecosθ1 [2] Eb=Ecos(θ1-120o) Ec=Ecos(θ1+120o) 式中E 为一相绕组中最大感应电势。接收机整步绕组的各相感应电势为 Eá=Ecosθ2 E娔=Ecos(θ2-120o) E婞=Ecos(θ2+120o) 由于二者转角不同,在整步绕组各相绕组中有均衡电流流过,它产生脉 动磁场,在转子上产生电磁转矩M=Mmsin δ(Mm为与自整角机结构有关 的最大电磁转矩;δ=θ1-θ2),促使接收机转动,直到与发送机转角相同 为止。自整角机电磁转矩较小,一般M=(2.94~108)×10-3牛·厘米/度,只能 带动指针或刻度盘等轻负载。力矩式自整角机可组成差动工作方式。这 时有两台发送机,一台差动式接收机。接收机转角为两台发送机转角的 代数和。在一定条件下一台发送机可带动多台接收机,称为力矩式自整 角机的并联运行。
chap05_自整角机
5.自整角机
1 2 sin Ea E2 A E1 A 2 E sin 2 2 1 2 120 sin Eb E2 B E1B 2 E sin 2 2 1 2 120 sin Ec E2C E1C 2 E sin 2 2
每相电流
E1a E Ia cos 1 I cos 1 2Z 2Z E2 b Ib I cos1 120 2Z E2 c Ic I cos1 120 2Z
5.自整角机
自整角变压器整步绕组磁势 4 4 F2 a 2I aWk w 2IWk w cos 1 F mcos 1 4 F2 b 2I bWk w Fm cos1 120 4 F2 c 2I cWk w Fm cos1 120 合成磁势幅值 合成磁动势位置
5.自整角机
发送机整步绕组磁势 4 4 1 2 F1a 2I aWk w 2IWk w sin sin 2 2 4 4 1 2 F1b 2I bWk w 2IWk w sin 120 sin 2 2 4 4 1 2 F1c 2I cWk w 2IWk w sin 120 sin 2 2
5.自整角机
A
T
A Ff
2
q-axis
1
F2
T
C F1 B
R
C
90
负载 d-axis 减速器 Motor
B
相敏整流
放大器
控制式自整角机(转子预转90度)
5.自整角机
此时的输出电压
第5章自整角机

以 代替sin 所造成
的误差不大于5%。
控制电机
失调角很小时,输出电势看成与失调角成 正比,这样输出电势的大小反映了发送轴和接
收轴转角差值的大小。 E0 E0max
自整角变压器输出绕组接上交流放大器时, 可认为输出绕组电压为:
U0= U0max
D’1
B’
该电压经放大后,送给
D’3
5.4 控制式自整角机的性能指标
一、误差概述
控制式自整角机在失调角很小时,其变压器
的输出电压为U0= U0max ,当 = 0 时,U0= 0 。
这个结论是在理想的自整角机中得出来的。
实际上,由于结构和工艺上的各种因素,即
使在协调位置 = 0 输出绕组中仍有电压U0存在。
D’1
B’
一般情况下,这个
Z’1 D’1 1 B’
当 = 0,cos =1 即转子绕组轴
线重合时,
E0= E0max ,变压器输出电势达
D’2
D’3 到最大。
控制电机
E0
2
1 Z’2
Z’1 D’1 1 B’
E0= E0max cos
把 = 0 作为协调位置,那么
协调时反而输出最大电势, 这是随动系统所不希望的。 系统希望协调位置时输出绕 组电势为 0 。
控制式自整角接收机输出的是与两 轴转角差成一定关系的电压,该电压控 制交流伺服电动机去带动被动轴旋转, 故能带动较大负载。由于接收机工作在 变压器状态,故通常称为自整角变压器。
控制电机
力矩式接收机直接输出力矩并带动负 载,但带载能力差,只能带动指针、刻度 盘等轻负载,常用于角度传输精度要求不 很高的指示系统中。
置定义为协调位置。协调时,输出电势E0= 0。相
力矩式自整角机工作原理及应用
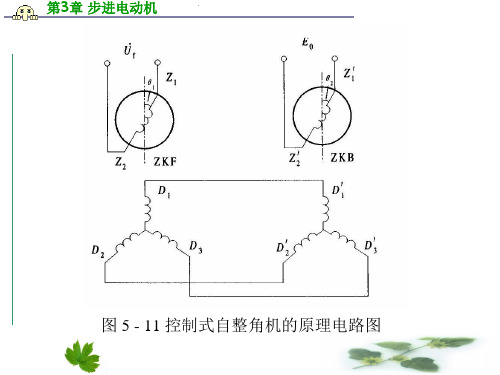
图 5 - 29为测量水塔内水位
5.6 自整角机的选用和技术数据
在自动控制系统中, 如果遇到要求能够“自动跟随”(或同步随动)、 远距离测量、 伺服机构的远距离控制等情况时, 理所当然应选用自整角机。 在选择自整角机时, 必然牵扯到自整角机本身的技术数据以及在选用中应注意的一些问题, 以下分别介绍。
4.空载电流和空载功率 空载电流和空载功率是指副边空载时, 励磁绕组的电流和消耗的功率。 例如“36ZKF01”的空载电流为92 mA; 空载功率不大于2 W。 5.开路输入阻抗 它是指副边开路, 从原边(即励磁端)看进去的等效阻抗。 对于发送机和接收机是指定子绕组开路, 从励磁绕组两端看进去的阻抗; 对于ZKB是指输出绕组开路, 从定子绕组两端看进去的阻抗。 例如“36ZKF01”的开路输入阻抗为1.25 kΩ。
图 5 - 25 火炮相对于罗盘方位角的控制原理图
5.5 力矩式自整角机的运行
5.5.1 力矩式自整角机的工作原理 ZLF-ZLJ的工作原理如图 5 - 26 所示。 图中这一对力矩式自整角机的结构参数、 尺寸等完全一样。 我们假定图 5 - 26中ZLF的转子励磁绕组轴线位置, 是当两机加励磁后, 由原来与ZLJ转子轴线相同的位置人为地逆时针方向旋转δ角的位置, 当忽略磁路饱和时, 我们可分别讨论ZLF和ZLJ单独励磁的作用, 然后进行迭加。
图 5 - 22 随动系统中的ZKF-ZKB
图 5 - 3 雷达俯仰角自动显示系统原理图
5.4 带有“ZKC”的控制式自整角机
自整角机除了作成对(ZKF和ZKB)运行外, 还可在ZKF和ZKB之间再接入控制式差动发送机即ZKC作控制式运行。 其目的是用来传递两个发送轴的角度和或角度差。
第02章自整角机

F
F
F
n1
n1
F
•
E Fa
发送机
F n1
F F n1
•
Ia
J
•
E Ja
•
Ic
接收机
•
Ib
图2-2 单相力矩式自整角机
-8-
第二章 自整角机
三、整步转矩的分析 为分析方便,先作如下假定: (1) 气隙磁场按正弦规律分布,即不计空间高次谐
波的影响。 (2) 磁路是线性的,即不计铁心的磁饱和效应。 (3) 不考虑整步绕组磁动势对励磁绕组磁动势的影
•
•
T1 K ( d Fq q Fd )
(2-16)
转矩系数
δ很小
Fd 0
•
T1 K d Fq
(2-17)
-23-
第二章 自整角机
直轴磁通和交轴磁动势的相位关系如图2-5所示,因 此上式可以写为
•
d
T1 Kd Fq cos
•
(2-18)
E
•
I (Fq )
图2-5 力矩式自整角机的相量图
Fm Fm
c os ( F c os ( F
2π ) 3 2π ) 3
(2-28)
Fm
4 π
2INkw
TF
TJ
3EFIF cosF
1 3EJ IJ cosJ
1
F 90 o J 90 o
cosF 0
cosJ 0
(2-1)
TF 0 TJ 0
0
-5-
第二章 自整角机 根据旋转磁场和电磁转矩的基本概念,当电磁转矩
为正时,其方向是使转子顺着旋转磁场方向转动;而当 电磁转矩为负时,其方向是使转子逆着旋转磁场方向转
自整角机结构及原理

第二节
力矩式自整角机
力矩式自整角机结构
力矩式自整角发送机和接收机大都采用两极的凸极机 结构。只有在频率较高而尺寸又较大的力矩式自整角 机中才采用隐极式结构。选用两极电机是为了保证在 整个圆周范围内只有唯一的转子对应位置,从而达到 准确指示。选用凸极式结构是为了能获得较好的参数 配合关系,以提高运行性能。
送机:主要与力矩式差动发送机、力矩式接收机一起工作,将
转子转角的变化转变为电信号输出。目前,我国生产的力矩式自整角发 送机其型号为ZLF。 ✓ 力矩式接收机:主要与力矩式发送机、力矩式差动发送机一起工作。其 作用是,接收了力矩式发送机或力矩式差动发送机的电信号后,使其转 子自动地转到对应于发送机转子的位置,或使转于转动的角度对应子发 送机转子和差动发送机转于转角变化的和或差)。目前,我国生产的力矩 式自整角接收机其型号为ZLJ。 ✓ 力矩式差动发送机:串接于力矩式发送机与接收机之间,将发送机的转 子转角及其自身的转子转角之和(或差)变换成电信号,传输给接收机。目 前,我国生产的力矩式差动自整角发送机其型号为ZCF ✓ 力矩式差动接收机:串接于两台力矩式发送机之间,接收它们输出的电 信号,使其转子转角为两台发送机转子转角之和(或差)。日前,我国生产 的力矩式差动自整角接收机其型号为ZCJ。
采用控制式自整角机和伺服机构组成的随动系统中,其驱动负载能力取决于系统 中的伺服电动机的容量,故能带动较大的负载。又控制式自整角机组成的闭环系 统,精度较高。
控制式自整角机分类
控制式自整角机按其用途可分为三种: 控制式发送机:主要用来与控制式自整角变压器或控制式差动发送机一
起工作。其作用是将转子转角的变化转变为电信号输出。目前,我国生 产的控制式自镑角发送机其型号为ZKF。 控制式自整角变压器:主要用来与控制式发送机及控制式差动发送机一 起工作。其作用是接收从控制式发送机或控制式差动发送机发送来的电 信号,使之变成与失调角呈正弦函数关系的输出电压。目前。我国生产 的控制式自锭角变压器其型号为ZKB。 控制式差动发送机:串接于控制式发送机与控制式自整角变压器之间, 将发送机转子转角及其自身转子转角的和(或差)变换成电信号送人自整角 变压器。目前,我国生产的控制式差动自整角发送机其型号为ZKC。
自整角章
5-1何为自整角机?答:自整角机是一种感应式交流微特电机,它能实现转轴的转角与电信号之间的相互变换,自整角机是具有自动整步能力。
5-2.简要说明力矩式自整角机中发送机和接收机定子绕组中合成磁动势的性质。
答:力矩式自整角机实际运行时,发送机和接收机同时励磁,定子绕组分别同时产生磁密FB 和J B ,其磁场为脉动磁场,脉动磁场的轴线分别与转子励磁磁场的轴线重合;因此,两磁动势合成还是一个脉动磁动势。
5-3. 什么是力矩式自整角机的整步转矩和比整步转矩?答:力矩式自整角机的接收机转子在失调时所产生的电磁转矩来促使转子和发送机转子协调,这个转矩称为整步转矩。
当失调角为10时,力矩式自整角机的整步转矩称为比整步转矩。
5-4力矩式自整角机的接收机中整步转矩是如何产生的,它与哪些因素有关?答:力矩式自整角机的失调角定义为发送轴和接收轴的转角差θ。
接收机定子交轴磁密Bq(即与转子绕组轴线垂直的分量)与其励磁磁密相互作用产生整步转矩。
整步转矩与失调角θ的正弦函数成正比,在失调角很小时,Tem近似与失调角θ成正比。
凸极式自整角机的整步转矩由两个不同性质的分量所组成,一个是整步绕组中的电流和励磁绕组建立的主磁通相互作用而产生的电磁整步转矩θsin2211qqfZXfUKT=;另一个是由于直轴和交轴磁阻不同而引起的反应转矩θsin2Tm22=T。
隐极式自整角机无反应整步转矩,只有电磁整步转矩。
5-5什么是力矩式自整角机的静态误差?产生静态误差主要取决于哪些因素?答:静态误差:当发送机与接收机静态协调时,两者转子转角之差为接收机的静态误差。
静态误差是衡量接收机跟随发送机的静态准确程度指标。
静态误差越小,则接收机跟随发送机的能力越强。
力矩式自整角机的静态误差主要取决于比整步转矩(失调角θ=1°时产生的整步转矩)和摩擦转矩的大小。
5-6控制式自整角机的作用是什么?输出的信号与哪些因素有关?答:控制式自整角机的作用是作为角度和位置的检测元件,将机械角度转换为电信号或将角度的数字量转换为电压模拟量。
微特电机总复习

微特电机总复习第二章伺服电动机2-2若直流伺服电动机的励磁电压下降,对电动机的机械特性和调节特性会有哪些影响?答:励磁电压下降则电枢电压减小,又由于机械特性是线性的,所以将导致理想空载转速降低,电磁转矩减小;调节特性是指:电机负载转矩恒定时,电机转速值控制电压变化的关系,所以励磁电压下降将导致电机转速n下降。
2-3交流异步伺服电动机的两相绕组匝数不同时,若外施两相对称电压,电机气隙中能否得到圆形旋转磁场?如果得到圆形旋转磁场,两相绕组的外施电压要满足什么条件?不能;即控制电压和励磁电压大小相等相位差90°电角度2-4为什么两相伺服电动机的转子电阻要设计得相当大?若转子电阻过大,对电机的性能会产生那些不利影响?答:原因有1)为了增大调速范围(和起动转矩)2)为了使机械特性更接近线性;3)两相交流伺服电动机在控制信号消失后会产生自转现象,如果转子电阻足够大,则电动机转子在脉振磁场作用下的合成电磁转矩始终为制动转矩,可以消除自转现象,并且可以扩大其稳定运行范围。
不过若转子电阻过大,会降低启动转矩. 同时也会导致机械特性变硬,更多的能量将消耗在电阻上,电机发热大,且快速响应性能变差。
2-6若已知直流伺服电动机的转动惯量J,如何从机械特性上求出电机的机电时间常数?如何加快电机的动态响应?(5分)答:根据机械特性求得n0及Td即可求得m。
2-7一台直流伺服电动机其电磁转矩为0.2倍额定电磁转矩时,测得始动电压为4V,并当点数电压Ua=49V时,电机转速为1500r/min。
试求电机为额定电磁转矩,转速为3000日/min时,应加多大的电枢电压?2-8 一台型号为45SY006的直流伺服电动机,额定电压27V,转速9000r/min,功率28W,测得电枢的转动惯量J=6.228*10-6kg.m2。
电枢电压Ua=13V时测得n0=4406r/min,堵转转矩Tk0=0.1006N.m。
按标准规定电动机的机电时间常数应不大于30ms。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.1 自整角机概述
自整角机
5.2 自整角机的基本结构 5.3 自整角机的工作原理和基本特点 5.4 自整角机主要性能指标和技术数据 5.5 自整角机的应用举例 5.6 力矩式自整角机
第5章
本章要求: 本章要求:
自整角机
掌握自整角发送机与接收机成对使用的特 了解自整角机的应用。 点,了解自整角机的应用。 熟练掌握控制式自整角机的工作原理及其 工作特点。 工作特点。 掌握控制式自整角机接收机输出绕组的位 输出绕组电势与失调角的关系。 置、输出绕组电势与失调角的关系。 掌握力矩式自整角机的工作特点、 掌握力矩式自整角机的工作特点 、 静态整 步转矩与失调角的关系、比整步转矩等。 步转矩与失调角的关系、比整步转矩等。
一、激磁磁场 自整角机 的激磁磁场, 的激磁磁场, 是一个磁场轴 线在空间固定 于激磁绕组轴 线上, 线上,磁通密 度分布曲线的 幅值随时间交 变的脉振磁场。 变的脉振磁场。
Z2 D1
Z’1
D’1
D2
D3
D’2
D’3
自整角机工作原理图
控制电机
脉振磁场特点: 复习内容) 脉振磁场特点:(复习内容) 1. 对某一瞬时而言,气隙各点磁通密度 对某一瞬时而言, 沿定子内圆作正弦分布; 沿定子内圆作正弦分布; 2. 对气隙中的某一点而言,其磁通密度 对气隙中的某一点而言, 随时间作正弦变化。 随时间作正弦变化。
i t1 t2 t3 t4 t5 气隙磁通密度分布曲线
0
t1
t2 t3 t4
t5
激磁电流曲线
控制电机
二、定子绕组的感应电势和电流 激磁绕组所产生的脉 D 轴线 振磁通必定和定子各相绕 θ 组相匝链, 组相匝链,因而在定子各 B Z 相绕组中感应出电势。 相绕组中感应出电势。 D D
1 1 1 1
Z2
控制电机
控制式自整角机的工作原理小结: 控制式自整角机的工作原理小结: 1 发送机激磁磁场是一个脉振磁场,它在 发送机激磁磁场是一个脉振磁场, 发送机定子绕组中感应出变压器电势。 发送机定子绕组中感应出变压器电势。 2 发送机定子绕组各相的感应电势,在时 发送机定子绕组各相的感应电势, 间上是同相的,其有效值与定、 间上是同相的,其有效值与定、转子的相对 位置有关。 位置有关。 3 发送机、接收机定子的三相绕组是对应 发送机、 连接的,在发送机定子绕组感应电势作用下, 连接的,在发送机定子绕组感应电势作用下, 两绕组中的相电流大小相等、方向相反。 两绕组中的相电流大小相等、方向相反。
控制电机
自整角机按其使用要求不同, 自整角机按其使用要求不同,可分为 控制式自整角机和力矩式自整角机。 控制式自整角机和力矩式自整角机。 控制式自整角接收机输出的是与两 轴转角差成一定关系的电压, 轴转角差成一定关系的电压,该电压控 制交流伺服电动机去带动被动轴旋转, 制交流伺服电动机去带动被动轴旋转, 故能带动较大负载。 故能带动较大负载。由于接收机工作在 变压器状态,故通常称为自整角变压器。 变压器状态,故通常称为自整角变压器。
2
激磁磁通对 定子绕组的匝链
左图中,假定此刻激 左图中, 磁磁通达到最大值 φm ,则 则 与定子三相绕组交链的磁 通分别为: 通分别为:
控制电机
φ1 = φm cosθ1 定子三相绕组中 o φ2 = φm cos (θ1 +120 ) 感应出变压器电势分 o φ3 = φm cos (θ1 +240 ) 别为: 别为: D 轴线 E1 = 4.44fWDφm cosθ1 o E2 = 4.44fWDφm cos (θ1 +120 ) θ B o E3 = 4.44fWDφm cos (θ1 +240 ) Z
5.1
概
述
自整角机是自动控制系统中的同步元 件。利用两台或多台自整角机在电路上的 联系,可以使相隔一定距离、 联系,可以使相隔一定距离、机械上互不 连接的两根或多根转轴保持同步旋转或产 生相同的转角变化。 生相同的转角变化。 与发送轴(即主动轴) 与发送轴(即主动轴)耦合的自整角 机称为发送机;与接收轴(即被动轴) 机称为发送机;与接收轴(即被动轴)耦 合的自整角机称为接收机。 合的自整角机称为接收机。
D’3
D2
B
D3
D’2
2、合成磁场 、 是一个脉振磁场。 是一个脉振磁场。
控制电机
3、合成磁通密度相量在空间的位置不变。合 、合成磁通密度相量在空间的位置不变。 成磁通密度相量的长度( 是时间的正弦函数。 成磁通密度相量的长度(模)是时间的正弦函数。 4、合成脉振磁场的幅值为 3Bm/2 ,它与转子 、 无关。 对定子的相对位置 θ1 无关。 自整角接收机(自整角变压器) 自整角接收机(自整角变压器)产生的磁场 如何呢? 如何呢? 由于发送机和变压器的三相同步绕组是对应 连接的,因此各对应相的电流应该大小相等、 连接的,因此各对应相的电流应该大小相等、方 向相反,所以变压器合成磁场轴线也与D’ 向相反,所以变压器合成磁场轴线也与 1相相夹 θ1 ,但方向与发送机中的合成磁场相反。该磁场 但方向与发送机中的合成磁场相反。 以B’表示。 表示。 表示
控制电机
~Uj θ1 Z1
Bj
E0 θ1 Z’1
θ1
结论: 结论:
θ2 Z’2
Z2 D1
D’1
B’
1、合成磁通密 、 度相量 B 在激磁绕 组轴线上。 组轴线上。由于激磁 绕组轴线和定子D 绕组轴线和定子 1相 轴线的夹角为θ 轴线的夹角为θ1,因 此定子合成磁场的轴 线与D 线与 1相相夹θ1 。
控制电机
力矩式接收机直接输出力矩并带动负 载,但带载能力差,只能带动指针、刻度 但带载能力差,只能带动指针、 盘等轻负载, 盘等轻负载,常用于角度传输精度要求不 很高的指示系统中。 很高的指示系统中。 自整角机按结构形式不同可分为接触 式和无接触式两大类。 式和无接触式两大类。
控制电机
雷达高低角自动显示系统原理图
1
定子合成磁场轴 答 案 线一定在激磁绕组轴 线上。(为什么?) 。(为什么 : 线上。(为什么?)
θ1 B
D1 Z1 Z2 D2
控制电机
定子合成磁场轴线之所以在激磁绕组 轴线上,是由于定子三相是对称的。 轴线上,是由于定子三相是对称的。如果 把发送机激磁绕组作为原边, 把发送机激磁绕组作为原边,定子三相绕 组作为副边,那么它的原、 组作为副边,那么它的原、副边间的电磁 关系就类似一台变压器。 关系就类似一台变压器。 由物理知识知道,此时定子合成磁场 由物理知识知道, 必定对激磁磁场起去磁作用。 必定对激磁磁场起去磁作用。当激磁电流 的瞬时值增加时, 的瞬时值增加时,定子合成磁场的方向必 定与激磁磁场方向相反。 定与激磁磁场方向相反。
<
4 U~ 3 3. 交流伺服电动机 4. 放大器 5. 刻度盘 6. 减速器 雷达 α 高低角
U j~
1. 自整角接收机 2. 自整角发送机 1 β 6 思考: 思考: 系统是如何 进行工作的? 进行工作的? 2
自整角机工作录象
E2 5
5.3 控制式自整角机的工作原理
~Uj θ1 Z1 E0 θ2 Z’2
θ2
δ
控制电机
失调角很小时, 失调角很小时,输出电势看成与失调角成 正比, 正比,这样输出电势的大小反映了发送轴和接 收轴转角差值的大小。 收轴转角差值的大小。 自整角变压器输出绕组接上交流放大器时, 自整角变压器输出绕组接上交流放大器时, 可认为输出绕组电压为: 可认为输出绕组电压为: U0= U0max γ 该电压经放大后,送给交流伺服电动机, 该电压经放大后,送给交流伺服电动机, 伺服电动机就带着接收轴转动, 伺服电动机就带着接收轴转动,以消除转角的 差值。 差值。
1 1
令 E = 4.44fWDφm ,则 E1 = E cosθ1 o E2 = Ecos (θ1 +120 ) o E3 = E cos (θ1 +240 )
D1
1
Z2
D2
激磁磁通对 定子绕组的匝链
控制电机
由于发送机定子和接收机定子相互连 接,这些电势必定在定子绕组中产生电流。 这些电势必定在定子绕组中产生电流。
一般情况下, 一般情况下,这个电压的相位和基本输 不一致。 出电压U0不一致。
控制电机
∆U ∆U 0
' 0
∆U
'' 0
第一个分量 ∆U 将引起转角 的随动误差。 表示。 的随动误差。这个误差用∆γ 表示。 '' 为正交分量, 第二个分量称 ∆U 0 为正交分量,它不 能引起转角的随动误差, 能引起转角的随动误差,但它使放大器和系 统的工作恶化。(为什么? 。(为什么 统的工作恶化。(为什么?)
控制电机
协调位置, 通常把δ = 90 的位置作为 协调位置,偏离此 o 位置的角度叫失调角γ 位置的角度叫失调角γ, δ = 90 - γ ,故 E0= E0max cosδ = E0max sin γ E0
o
在失调角很小时, 在失调角很小时, sin γ ≈ γ θ1 Z’2 E0 ≈ E0max γ 。 在 γ 角很小且用 Z’1 B’ D’1 D’1 弧度作单位时, 弧度作单位时, sin γ θ1 B’ o o ≈ γ 。当 γ = 0 ~30 θ1 δ Z’1 (即0 ~0.523 弧度) 弧度) γ 以γ 代替sin γ 所造成 代替 D’3 D’2 协调位置 的误差不大于5%。 的误差不大于 。
o
6 输出绕组的电势是变压器电势,其有效值 输出绕组的电势是变压器电势, E0= E0max sin γ ,在小失调角时,可认为 0= E0max 在小失调角时,可认为E γ 。这里, γ 的单位为弧度。 这里, 的单位为弧度。
5.4
控制式自整角机的性能指标
一、误差概述
控制式自整角机在失调角很小时, 控制式自整角机在失调角很小时,其变压器 的输出电压为U 的输出电压为 0= U0max γ ,当 γ = 0 时,U0= 0 。 这个结论是在理想的自整角机中得出来的。 这个结论是在理想的自整角机中得出来的。 实际上,由于结构和工艺上的各种因素, 实际上,由于结构和工艺上的各种因素,即 存在。 使在协调位置γ = 0 输出绕组中仍有电压∆U0存在。