灰度传感器
3.12 灰度传感器模块

3.12 灰度传感器模块功能描述:
用来检测目标物体的黑白度,集成两个灰度传感器,也可以用于实现智能小车的巡线。
应用示例——用数码管显示灰度传感器模块的返回值
元器件列表:
1.Nduino Pro主控板×1
2.灰度传感器模块×1
3.数码管模块(计数)×1
4.4Pin 2510连接线(红)×2
电路连接:
必须连接外接电源!否则,传感器测量的数据会不准确。
调试传感器:
使用螺丝刀旋转背面的电位器可以调节识别黑白线的阈值。
背面两个LED指示灯分别用于指示传感器识别状态,当LED灯熄灭时,代表传感器对准黑色,当LED灯亮起时,代表传感器对准白色
调节步骤:
将两个灰度传感器都对准黑色块,调节背面电位器,以使两个LED指示灯都熄灭。
将左侧灰度传感器对准白色快,右侧灰度传感器对准黑色块,调节背面电位器,以使左侧LED指示灯(L)亮起,右侧LED指示灯(R)熄灭。
反之同理
最后,将两个灰度传感器都对准白色块,两个LED灯都会亮起。
Mixly程序编写:
限位开关模块
打开“NOVA”模块,从“传感器”类目中拖动“灰度传感器”模块进入编程区
选择端口号与实际电路连接一致,本例为“M1”。
应用示例程序:
运行结果:
L R L R L R L R。
灰度传感器的工作原理
灰度传感器的工作原理
灰度传感器是一种用于测量和表示灰度级别的设备,常用于图像处理、计算机视觉和光学测量等领域。
它能够根据光线的强弱来确定物体的亮度。
灰度传感器的工作原理主要基于光电效应和光电转换。
灰度传感器通常由光敏元件(光敏二极管或光敏电阻)和信号处理电路组成。
当光线照射到光敏元件上时,光敏元件会产生电流或电阻值的变化。
这种变化与光照强度成正比,也就是说,光照越强,产生的电流或电阻值就越高。
因此,通过测量这种电流或电阻值的变化,可以得到物体的亮度信息。
灰度传感器一般会将光敏元件接入一个信号处理电路中。
这个电路会将光敏元件产生的电流或电阻值转换成相应的电压信号或数字信号。
这些信号可用于表示物体的灰度级别。
例如,在图像处理中,数字信号可以被处理成灰度图像,以显示物体的亮度分布情况。
灰度传感器的工作原理还包括对环境光的补偿。
因为灰度传感器往往是在不同的环境条件下工作,而环境光的影响会导致灰度传感器的输出产生偏差。
为了提高测量的准确性,灰度传感器通常会采用某种补偿方法,将环境光的影响降到最低。
除了用于图像处理和计算机视觉,灰度传感器还被广泛应用于光学测量、颜色识别、亮度调节等领域。
它具有测量简单、灵敏度高、响应时间快等优点,可实现对光照强度的精确测量和控制。
五路灰度传感器的工作原理
五路灰度传感器的工作原理嘿,朋友们!今天咱们来聊聊一个超酷的东西——五路灰度传感器。
这玩意儿可有意思啦!我有个朋友叫小李,他呀,在搞一个小机器人项目。
这个小机器人得在不同颜色的地面上跑来跑去,还得能识别路线呢。
这时候,五路灰度传感器就闪亮登场啦。
我当时就好奇,这东西到底咋工作的呢?五路灰度传感器呢,就像是一个有着五双不同眼睛的小怪物。
这五双眼睛呀,各有各的任务。
咱们先来说说什么是灰度。
你看啊,咱们平常看到的颜色有深有浅对吧?灰度呢,就是把这些颜色不管它原本是什么,都转化成黑白程度的一个值。
就好像把这个花花绿绿的世界变成了一个黑白的水墨画一样。
那五路灰度传感器就是去检测这不同程度的黑白,也就是灰度啦。
我去问过一个懂行的老师傅,他跟我说,这五路灰度传感器里面有光敏电阻呢。
这光敏电阻就像是一个个特别敏感的小卫士。
当光线照到上面的时候,它们的电阻就会发生变化。
比如说,白色的东西反射光线多,那照到光敏电阻上的光就强,电阻变化就大;黑色的东西呢,吸收光线多,反射的少,那照到光敏电阻上的光就弱,电阻变化就小。
这就好像是白色是个热情的家伙,使劲把光往外推,黑色是个害羞的家伙,把光都藏起来了一样。
那这五路是怎么回事呢?这就好比是五条不同的小路,每个小路都有一个光敏电阻在站岗。
这五个站岗的呢,同时去检测它们面前的灰度。
比如说,在小机器人走的那个地面上,有一块黑色的区域和一块白色的区域。
最左边的那个“小路”的光敏电阻检测到白色区域,电阻变化大,它就给小机器人的控制系统发送一个信号,说:“嘿,我这儿是白色呢!”中间的那个检测到黑色区域,电阻变化小,它也赶紧说:“我这儿是黑色!”这时候,小机器人的控制系统就像一个聪明的大脑一样。
它接收到这五路传感器传来的信号,就开始分析。
我和小李就讨论这个过程,他说:“这就像是大脑在拼图呢,把这五路传来的不同灰度信息拼在一起,就能知道前面的路大概是什么样子啦。
”我就觉得特别神奇,我就问他:“那要是这五路的信息有点乱呢?”他笑着说:“那也不怕呀,这控制系统可以设置一些算法呢。
关于灰度传感器的知识
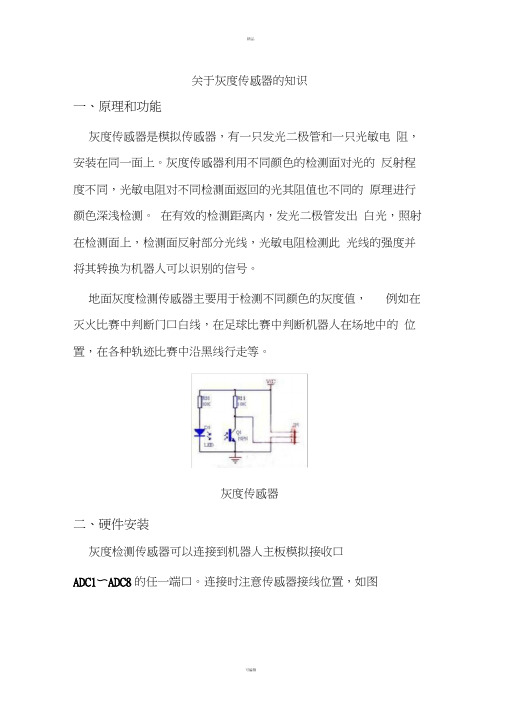
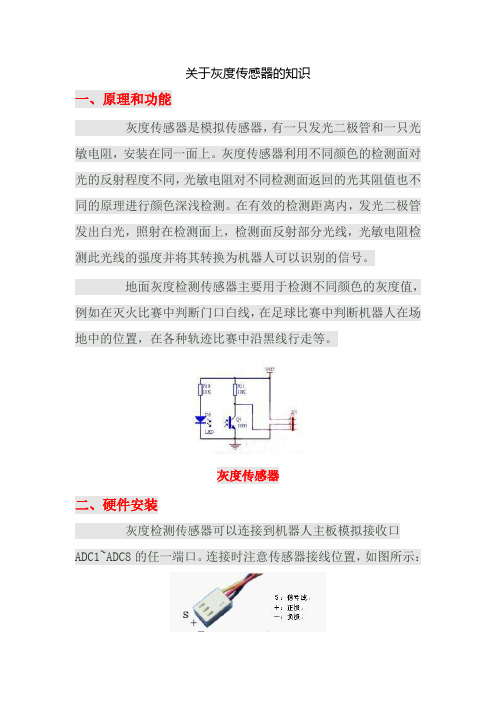
关于灰度传感器的知识一、原理和功能灰度传感器是模拟传感器,有一只发光二极管和一只光敏电阻,安装在同一面上。
灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。
在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号。
地面灰度检测传感器主要用于检测不同颜色的灰度值,例如在灭火比赛中判断门口白线,在足球比赛中判断机器人在场地中的位置,在各种轨迹比赛中沿黑线行走等。
灰度传感器二、硬件安装灰度检测传感器可以连接到机器人主板模拟接收口ADC1〜ADC8的任一端口。
连接时注意传感器接线位置,如图所示:传感器固定时,可以将传感器模块直接插在机器人底盘底部的 灰度专用安装孔内,或用双面胶等固定在特殊位置。
三、软件操作1、 操作步骤在开发软件中直接选择输入输出模块库中的“模拟输入”模 块,在“模拟输入”模块属性框端口选择中选择与传感器所连接 的相应端口。
数值小,当颜色越深时数值大。
号服扱 侍正負S + -S将尿仅传型細丿:1运打屮1嶠人丄.谓节传泌砂JiMLi高度*并吐变他曲越包记壊壮懑器返凹值(测试程庁茸丄文屮的聖普程序〉数輻如心由此测试可得出以卜培血在底祁蕨度传感闊距海地面2mm-4cm ffj,改变地而的顿色(不同滉浅人我们葩H別质数的变彳匕可发观地面醱世越门.数血越小,地越議,数十值越大:NN衣產传感器所谓灰匯也可认为是亮匿’简单的说就是啊夥附深注程匿口灰窿传感器餉主要工年廩理是它侵用两貝二极管一只为发白光的高惑发光二极管,另一只为光敏探头.@1014灰匱传感器宴物凰发光管发出郵站光照射在物体上.通诡体反射回来落在光鹼二极管匕由于照射在它上面的光线强弱的影响,光管的阻值在反射光线很弱他就是物体为深色)时为几百仪一般光照度下为几KQ, 在反射光线很强他就是物体颜包很忍几乎全反射刖为几十Q这样就能检测到物体的脈色的灰度7-如图1Z硼示.利用LED发出的光聽搦物体上,灰度蘇鮒收物体的反射光.丰瞬反I寸光的强度,可以利断出恸傑的翊程度.口!纹是着吕M乎狄扑录山土一工心手冬览屮殳圳的・也冷.虻丿趾圧MJ见七士LM *1 土産一种常勻門世無人田肉限无法看卩职种也弟但它的钿理持忤与可乩背裁檢甘相储有希轴员的埶坯射.由千它怖十口以许中盯堆护外侧,曲苗惋“卜禹红外统杓洋圧荊翻樓乱仆+n,75-wn徽米斜耐输牽図于可见光.圏1匚苗红百卜询麻器槓块冥梅国红y卜恃腿棋块咬u圏loi晰示)可用来迦運陳塀翻的$巨咼,由红外发肘管和助験攻髀麻・具扇碼埋是:茨射管■发射红刿先当骑右殳有障碍物时,级卜無歎一宜汪苗照射’一旦遇到障厲慚结,红外朮。
灰度传感器
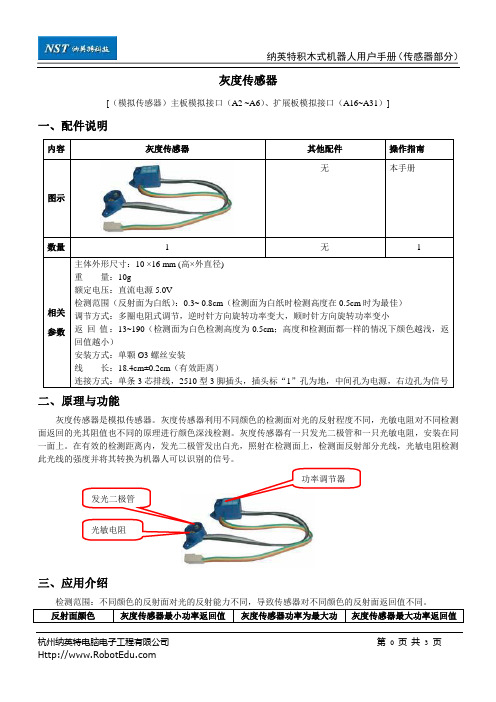
灰度传感器[(模拟传感器)主板模拟接口(A2 ~A6)、扩展板模拟接口(A16~A31)]一、配件说明二、原理与功能灰度传感器是模拟传感器。
灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。
灰度传感器有一只发光二极管和一只光敏电阻,安装在同一面上。
在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号。
三、应用介绍发光二极管光敏电阻功率调节器注:“高”指传感器探头距离探测面距离,此数据仅供参考四、使用方法1、安装将传感器的发射/接收头用螺钉固定至机器人底部,发射/接收头离开地面约0.5厘米,插头连接到机器人空余的模拟口上,即可正常使用。
2、调节灰度传感器上无信号指示灯,但是配有检测颜色返回模拟量大小调节器。
欲使检测给定的颜色时,可以将发射/接收头置于给定颜色处,配合调节器即可调出合适的返回模拟量。
方法如下: 将调节器逆时针方向旋转,返回模拟量变大; 将调节器顺时针方向旋转,返回模拟量变小; 可以一直调节直到你需要的数值为止。
若需要准确的模拟量,可以用程序在液晶屏幕上显示,配合调节器即可调出准确的模拟量。
注:大家在用螺丝刀旋转调节器时,不要旋的太快,也不要旋的太用力,以防旋坏,在发现旋不动时,应马上停止。
五、项目应用灰度传感器在很多项目中都要使用。
在初中灭火、高中搜救项目中,机器人可以通过灰度传感器寻找灭火圈、“房间”门口白线和停止区; 在轨迹项目中,可以用灰度传感器走黑色的轨迹线。
六、示例程序假设在模拟3口(A3)接上一个灰度传感器来说明它的使用。
本例功能:检测黑色场地上的白线。
遇到白色,就停止前进;如没有,就一直前进。
程序及流程图如下所示:运行程序,观察机器人行走可知:无白色时,一直前进;有白色时,即停止前进。
七、常见故障灰度传感器性能很稳定,正常使用情况下不易损坏八、注意事项1、根据它的工作原理,是光敏探头根据检测面反射回来的光线强度,来确定其检测面的颜色深浅,因此测量的准确性和传感器到检测面的距离是有直接关系的。
第6讲灰度传感器的使用

第6讲灰度传感器的使用任务6-1串行通信相关知识1、串行通信与并行通信在计算机系统中,通信是指部件之间的数字信号传输,通常有两种方式:并行通信和串行通信。
并行通信,即数据的各位同时传送;串行通信,即数据是一位一位地顺序传送。
图1为这两种通信方式的电路连接示意图。
表对两种通信方式进行了比较。
(a)并行通信(b)串行通信图1 两种通信方式的电路连接形式表1 并行通信与串行通信的比较2、单工通信与双工通信按照数据传送方向,串行通信可分为单工(simplex)、半双工(half duplex)和全双工(full duplex)三种制式,图为三种制式的示意图。
(a)单工(b)半双工(c)全双工图2 单工、半双工和全双工三种制式在单工制式下,通信一方只具备发送器,另一方则只具备接收器,数据只能按照一个固定的方向传送,如图(a)所示。
在半双工制式下,通信双方都备有发送器和接收器,但同一时刻只能有一方发送,另一方接收;两个方向上的数据传送不能同时进行,其收发开关一般是由软件控制的电子开关,如图(b)所示。
在全双工通信制式下,通信双方都备有发送器和接收器,可以同时发送和接收,即数据可以在两个方向上同时传送,如图(c)所示。
在实际应用中,尽管多数串行通信接口电路具有全双工功能,但一般情况下,只工作于半双工制式下,这种用法简单、实用。
3、异步通信与同步通信按照串行数据的时钟控制方式,串行通信可分为异步通信和同步通信两类。
1)、异步通信(Asynchronous Communication)在异步通信中,数据通常是以字符为单位组成字符帧传送的。
字符帧由发送端一帧一帧地发送,每一帧数据是低位在前、高位在后,通过传输线由接收端一帧一帧地接收。
发送端和接收端分别使用各自独立的时钟来控制数据的发送和接收,这两个时钟彼此独立,互不同步。
异步通信的好处是通信设备简单、便宜,但由于要传输其字符帧中的开始位和停止位,因此,异步通信的开销所占比例较大,传输效率较低。
灰度传感器

灰度传感器日期:2006-5-16 13:58:38 来源: 点击: 690 添加到收藏夹实图:原理和功能:灰度传感器是模拟传感器,灰度传感器利用光敏电阻对不同颜色的检测面对光的反射程序不同,其阻值变化在的原理进行颜色深浅检测。
灰度传感器有一只发光二极管和一只光敏电阻,安装在同一面上。
在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号。
技术指标:重量:20g 额定电压:DC 5.0V 调节方式:多圈电阻式调节指示方式:无安装方式:灰度传感器线长:20cm±1cm返回值:0~255,检测颜色越浅,返回值越小连接方式:1条3芯排线和1条4芯排线,2510型3脚插头使用方法:将传感器的发射/接收头用螺钉固定至机器人底部,发射/接收头离开地面约0.5厘米,插头连接到机器人空余的模拟口上,即可正常使用。
灰度传感器上无信号指示灯,但是配有检测颜色返回模拟量大小调节器。
欲使检测给定的颜色时,可以将发射/接收头置于给定颜色处,配合调节器即可调出合适的返回模拟量。
方法如下:λ将调节器逆时针方向旋转,返回模拟量变大;λ将调节器顺时针方向旋转,返回模拟量变小;可以一直调节直到你需要的数值为止。
若需要准确的模拟量,可以用程序在液晶屏幕上显示,配合调节器即可调出准确的模拟量。
注:大家在用螺丝刀旋转调节器时,不要旋的太快,也不要旋的太用力,以防旋坏,在发现旋不动时,应马上停止。
示例:假设在模拟3口(A3)接上一个灰度传感器来说明它的使用。
将灰度传感器的单向插座插在模拟3口(A3)上,并用螺丝钉将灰度传感器固定在机器人上,用螺丝钉将发射/接收头固定在机器人前下方。
本例功能:检测正前方有无白色(或浅色)。
遇到白色,就停止前进;如没有,就一直前进。
程序及流程图如下所示:void main(){while(1){motor(0,40); //无白色就一直前进motor(1,40);while( analog(3)<127) //有白色就停止{ stop(); }}}运行程序,观察机器人行走可知:无白色时,一直前进;有白色时,即停止前进。
灰度传感器原理

灰度传感器原理灰度传感器是一种能够测量物体表面灰度级别的传感器。
它广泛应用于图像处理、机器视觉、自动化控制等领域。
本文将介绍灰度传感器的原理及其应用。
一、灰度传感器原理灰度传感器利用光敏元件接收物体表面反射光线的强度,并将其转化为电信号。
光敏元件通常采用光敏二极管或光敏电阻。
当光线照射到光敏元件上时,光敏元件会产生电流或电阻的变化,这个变化与光线的强度成正比。
通过测量电流或电阻的变化,可以得到物体表面的灰度级别。
灰度级别通常用数字表示,范围从0到255。
数值越小,表示物体的灰度越暗,数值越大,表示物体的灰度越亮。
灰度传感器对不同灰度级别的物体有不同的响应。
在测量过程中,灰度传感器会输出一个电压信号,该信号的幅度与物体的灰度级别成正比。
二、灰度传感器的应用1. 图像处理:灰度传感器常用于图像处理领域。
通过测量物体表面的灰度级别,可以对图像进行灰度校正、对比度增强等处理,从而提高图像的质量和清晰度。
2. 机器视觉:在机器视觉系统中,灰度传感器可以用于检测物体的形状、轮廓和纹理等特征。
通过测量不同区域的灰度级别,可以实现物体的识别、分类和定位。
3. 自动化控制:灰度传感器在自动化控制系统中具有重要的应用价值。
例如,在流水线生产中,可以利用灰度传感器对产品进行质量检测,判断产品表面是否存在缺陷或污渍。
4. 机器人导航:灰度传感器可以用于机器人的导航和路径规划。
通过测量地面的灰度级别,可以确定机器人当前位置和移动方向,从而实现精确定位和避障功能。
5. 光控照明:灰度传感器可以用于光控照明系统中。
通过测量环境光线的强度,可以自动调节照明设备的亮度,以适应不同的环境光照条件。
三、总结灰度传感器是一种能够测量物体表面灰度级别的传感器。
它通过光敏元件将物体表面反射光线的强度转化为电信号,从而实现灰度的测量。
灰度传感器在图像处理、机器视觉、自动化控制等领域具有广泛的应用。
通过测量物体的灰度级别,可以实现图像处理、物体识别、质量检测等功能。
灰度传感器工作原理

灰度传感器工作原理
灰度传感器是一种用于测量被测物体表面的灰度值的传感器,通常被广泛应用于图像识别、机器人视觉等领域。
灰度传感器的工作原理基于光电效应。
当光线照射到被测物体表面时,物体上的不同颜色会对光的吸收和反射产生不同的影响。
灰度传感器利用光敏元件(如光敏二极管或光敏电阻等)对光的反射进行感测。
在传感器工作时,光源会照射到被测物体表面,被测物体会反射一部分光线。
光线经过光敏元件后,光敏元件会产生相应的电流信号。
这个电流信号的大小与被测物体表面的灰度值成正比。
传感器将电流信号转换成数字信号,并输出给控制系统进一步处理。
为了获得更准确的灰度值,灰度传感器通常会采用特殊的光学滤波器来去除光线的干扰。
滤波器可以只通过特定波长的光,使传感器只接收到特定颜色的光信号,从而提高测量的准确性。
灰度传感器的输出结果可以表示为数字形式,通常是一个数字值,范围从0到255,也可以是模拟形式,输出一个电压值。
根据这个输出结果,我们可以推断出被测物体表面的颜色和亮度水平,从而实现对物体的灰度分析和识别。
总之,灰度传感器通过光电效应的原理,利用光敏元件对被测物体表面的光反射进行感测,并输出相应的电流信号来表示被
测物体的灰度值。
这种传感器在计算机视觉、图像分析以及自动控制系统中有着广泛的应用。
灰度传感器工作原理
灰度传感器工作原理灰度传感器是一种常用于测量物体表面反射光强度的传感器,它可以根据物体表面的灰度值来判断物体的颜色深浅,从而实现对物体的识别和检测。
在工业自动化、机器人视觉、智能家居等领域都有着广泛的应用。
那么,灰度传感器是如何工作的呢?接下来我们将详细介绍灰度传感器的工作原理。
首先,灰度传感器通过感光元件来感知物体表面的光强度。
当光线照射到物体表面时,物体会反射一部分光线,而灰度传感器就是通过感光元件来接收这些反射光线的强度。
感光元件通常采用光敏二极管或光敏电阻,它们对光线的敏感度不同,可以根据具体的应用需求选择合适的感光元件。
其次,灰度传感器会将接收到的光强度信号转换成电信号。
感光元件接收到的光线强度会转化为相应的电压或电流信号,这样就可以通过电子电路进行信号放大、滤波和处理。
在转换过程中,灰度传感器可以根据不同的灰度级别输出相应的电信号,从而实现对物体灰度值的测量和识别。
最后,灰度传感器会根据处理后的电信号进行数据分析和判断。
经过电子电路处理后的电信号会被送入微处理器或单片机进行数字化处理,通过内置的算法和逻辑判断,可以实现对物体灰度值的精确测量和识别。
在实际应用中,灰度传感器可以通过与其他传感器或执行器的配合,实现对物体颜色、形状、位置等多维度信息的获取和控制。
总的来说,灰度传感器的工作原理主要包括感光元件的光强度感知、信号转换和处理、数据分析和判断等步骤。
通过这些步骤,灰度传感器可以实现对物体灰度值的准确测量和识别,为各种自动化系统和智能设备提供了重要的数据支持。
在实际应用中,灰度传感器不仅可以用于工业自动化领域的物体检测和识别,还可以应用于机器人视觉系统、智能家居设备、智能车载系统等多个领域。
随着人工智能、物联网、智能制造等技术的不断发展,灰度传感器的应用前景将会更加广阔,为实现智能化、自动化的生产和生活提供更多可能性。
灰度传感器工作原理
灰度传感器工作原理灰度传感器是一种常用于测量光线强度的传感器,它能够对光线的强弱进行检测,并将其转化为电信号输出。
在很多应用中,灰度传感器被广泛应用于光电控制、自动测距、光电测量等领域。
那么,灰度传感器是如何工作的呢?接下来,我们将详细介绍灰度传感器的工作原理。
灰度传感器的工作原理主要是基于光电效应。
当光线照射到传感器上时,光子会激发传感器中的光敏元件(如光敏二极管或光敏电阻),使其产生电子-空穴对。
这些电子-空穴对会在电场的作用下分离,从而产生电流或电压信号。
传感器会根据光线的强弱来输出不同的电信号,从而实现对光线强度的测量。
在具体的工作过程中,灰度传感器通常会采用不同的光敏元件来实现对光线的检测。
光敏元件的特性会影响传感器的灵敏度和响应速度。
一般来说,光敏二极管适用于高速响应的场合,而光敏电阻则适用于对光线强度变化要求不是很高的场合。
此外,灰度传感器还需要配合滤光片来选择特定波长的光线进行检测。
通过选择不同的滤光片,可以使传感器对特定波长的光线更为敏感,从而实现对特定光源的检测和测量。
在应用中,灰度传感器通常会被用于光电控制系统中。
通过对光线的测量,可以实现对光照强度的自动调节,从而提高光电控制系统的稳定性和精度。
此外,灰度传感器还可以被应用于自动测距系统中,通过对反射光线的测量,实现对目标距离的精准测量。
总的来说,灰度传感器是一种能够对光线强度进行测量的传感器,它的工作原理是基于光电效应,通过光敏元件对光线的检测来实现对光线强度的测量。
在实际应用中,灰度传感器被广泛应用于光电控制、自动测距、光电测量等领域,为相关系统的稳定性和精度提供了重要的支持。
燃油灰度传感器的设计与应用研究

燃油灰度传感器的设计与应用研究第一章燃油灰度传感器的概述燃油灰度传感器是指测量燃油中灰分含量的传感器。
随着燃油的不断升级,对燃油质量的要求也越来越高,因此燃油灰度传感器的应用也越来越广泛。
传统的燃油灰度测量方法主要是采用光学方法,但这种方法存在精度不高、样品准备困难等问题。
燃油灰度传感器能够实现在线、自动、快速地测量燃油中的灰分含量,具有精度高、可靠性强、操作简单等优点,因而越来越受到人们的关注。
第二章燃油灰度传感器的设计原理燃油灰度传感器主要由测量头、信号处理电路、数据处理器等组成。
测量头采用高分辨率的图像传感器,对燃油中的灰分进行拍摄和采集。
信号处理电路通过对采集的图像进行数字信号处理,得到灰度直方图。
数据处理器通过对灰度直方图进行计算,得出燃油中的灰分含量,并输出数字信号。
第三章燃油灰度传感器的应用研究燃油灰度传感器的应用主要分为两个方面:一是燃料油的监测,二是燃料油的加工。
在燃料油的监测方面,燃油灰度传感器可以实现对燃油中灰分含量的在线监测,能够有效地降低燃油使用中的故障率,提高燃油的使用寿命。
在燃料油的加工方面,燃油灰度传感器可以实现对燃油中灰分含量的准确测量,为后续的燃油处理提供准确的数据支持。
第四章燃油灰度传感器的优点与不足燃油灰度传感器具有精度高、可靠性强、操作简单等优点,可以实现对燃油中的灰分含量进行快速、准确的测量。
但燃油灰度传感器也存在一些不足之处,如对燃油中水分的干扰较大,需要加强对其干扰的抑制;同时,由于燃油灰度传感器对燃油样品的要求较高,对样品的处理过程要求较为精细,操作难度较大。
第五章结论与展望燃油灰度传感器作为一种新型的传感器,具有在燃油质量控制领域应用前景广阔的优点,但受技术限制,其性能还有待进一步的提升和完善。
未来的研究方向将主要集中在提高燃油灰度传感器的精度和灵敏度,降低对样品的要求,减小其对燃油中水分的干扰,进一步拓展其应用领域。
相信随着燃油灰度传感器的不断完善,先进、高效、节能的燃油使用方式将会得到更好的实现。
关于灰度传感器的知识
关于灰度传感器的知识
一、原理和功能
灰度传感器是模拟传感器,有一只发光二极管和一只光敏电阻,安装在同一面上。
灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。
在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号。
地面灰度检测传感器主要用于检测不同颜色的灰度值,例如在灭火比赛中判断门口白线,在足球比赛中判断机器人在场地中的位置,在各种轨迹比赛中沿黑线行走等。
灰度传感器
二、硬件安装
灰度检测传感器可以连接到机器人主板模拟接收口ADC1~ADC8的任一端口。
连接时注意传感器接线位置,如图所示:
接线方式
传感器固定时,可以将传感器模块直接插在机器人底盘底部的灰度专用安装孔内,或用双面胶等固定在特殊位置。
三、软件操作
1、操作步骤
在开发软件中直接选择输入输出模块库中的“模拟输入”模块,在“模拟输入”模块属性框端口选择中选择与传感器所连接的相应端口。
灰度检测传感器在使用时返回数值为0~1023,当颜色越淡时数值小,当颜色越深时数值大。
2、说明
在代码编辑时,使用函数getadc(n),n为端口号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
原理和功能:灰度传感器是模拟传感器,灰度传感器利用光敏电阻对不同颜色的检测面对光的反射程序不同,其阻值变化在的原理进行颜色深浅检测。
灰度传感器有一只发光二极管和一只光敏电阻,安装在同一面上。
在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号。
技术指标:返回值:0~255,检测颜色越浅,返回值越小连接方式:1条3芯排线和1条4芯排线,2510型3脚插头灰度传感器上无信号指示灯,但是配有检测颜色返回模拟量大小调节器。
欲使检测给定的颜色时,可以将发射/接收头置于给定颜色处,配合调节器即可调出合适的返回模拟量。
方法如下:λ将调节器逆时针方向旋转,返回模拟量变大;λ将调节器顺时针方向旋转,返回模拟量变小;示例:假设在模拟3口(A3)接上一个灰度传感器来说明它的使用。
将灰度传感器的单向插座插在模拟3口(A3)上,并用螺丝钉将灰度传感器固定在机器人上,用螺丝钉将发射/接收头固定在机器人前下方。
本例功能:检测正前方有无白色(或浅色)。
遇到白色,就停止前进;如没有,就一直前进。
程序及流程图如下所示:void main(){while(1){motor(0,40); //无白色就一直前进motor(1,40);while( analog(3)<127) //有白色就停止{ stop(); }}}运行程序,观察机器人行走可知:无白色时,一直前进;有白色时,即停止前进。
注意事项:1、根据它的工作原理,是光敏探头根据检测面反射回来的光线强度,来确定其检测面的颜色深浅,因此测量的准确性和传感器到检测面的距离是有直接关系的。
在机器人运动时机体的震荡同样会影响其测量精度。
2、外界光线的强弱对其影响非常大,会直接影响到检测效果,在对具体项目检测时注意包装传感器,避免外界光的干扰。
3、检测面的材质不同也会引起其返回值的差异。
参考数据:将灰度传感器固定在机器人上,调节传感器与地面高度,并改变地面颜色,记录传感器返回值(测试程序即上文中的参考程序)数据如下:由此测试可得出以下结论:在底部灰度传感器距离地面2mm-4cm时,改变地面的颜色(不同深浅),我们能看到读数的变化,可发现地面颜色越白,数值越小,地面颜色越黑,数字值越大。
灰度测量模块产品编号:JMP-BE-1113 产品价格:60元模块概述灰度测量模块是一个能够实现黑色检测的电子部件。
在环境光干扰不是很严重的情况下,用于区别黑色与其它颜色。
它还有比较宽的工作电压范围,在电源电压波动比较大的情况下仍能正常工作。
它输出的是连续的模拟信号,因而能很容易地通过A/D转换器或简单的比较器实现对物体反射率的判断,是一种实用的机器人巡线传感器。
模块特点1、减少日光、灯光等环境光的影响2、宽工作电压范围4.5V –5V使用实例应用中,灰度测量模块和其他测量模块一样,是先接插硬件,然后定义硬件类型,最后使用对应的模块图标进行控制,读取测量值。
由于灰度测量模块返回的是模拟电平,所以在使用的时候,它只能接插在A1~A4的8个接口中。
安装时应将模块正对被测物体且与被测量面距离小于1厘米,以取得最佳测量效果。
安装好模块,在RoboEXP机器人快车软件的“硬件信息”里面,选择“_ GrayADTest_”“灰度测量模块”类型,添加一个硬件实例。
设置好硬件实例名称,就可以使用模块图标对灰度测量模块进行编程、读取、控制。
灰度测量模块只需要使用一个“unsigned char”类型保存模块的返回值,然后再根据变量里面的返回值进行运算、判断等等操作就可以了。
例子程序是通过向被测物体发射光波,把当时的反射值显示在液晶屏幕上。
程序位于机器人快车软件安装目录下的"Examples\PhotoElectricity\Gr ayADTest\GrayADTest.rcu"。
灰度测量模块的发光二极管发出一束白色(或蓝色)的光,照到不同颜色的物体上,由于不同颜色对光线的吸收作用不一样(总的来说,颜色越深,吸收越多,颜色越浅,吸收越少),导致反射光线的强弱不同。
灰度测量模块的发射管与接收管之间有一定角度,并且光波信号随着距离的增大强度会减少,因此即使是对着同一的反射物,当灰度测量模块与反射物的距离变化时,输出电平也会变化,在使用时要特别注意这一点。
通常灰度测量模块距反射物0.5 – 1 cm时,使用效果较好。
在实际使用前,可以先取若干颜色深浅不同的物体,用灰度测量模块在不同的颜色进行测试,记录测量数据,用作实际使用的参考。
另外,该传感器不具备对颜色识别能力,不能作为颜色传感器。
工作原理灰度测量模块通过向被测物体发射光波,然后测量反射信号强度的方法实现对物体反射率的测量的。
对于黑色之类较颜色比较深的物体,反射信号比较弱,因而输出电平较低;对于白色之类颜色比较浅的物体,反射信号比较强,因而输出电平比较高。
通过对输出电平的测量比较,机器人就能判别物体颜色的深浅。
电路中包含了稳压等环节,因此工作的电源范围比较宽,并且能克服电源电压波动对电路的影响。
附录:中鸣三种灰度传感器(BE-1111、BE-1112、BE-1113)测试比较底部灰度传感器日期:2009-8-5 11:11:29 来源: 点击: 796 添加到收藏夹底部灰度传感器产品手册.PDF1. 简介灰度传感器是模拟传感器。
灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。
灰度传感器有一只发光二极管和一只光敏电阻,安装在同一面上。
在有效的检测距离内,发光二极管发出白光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为机器人可以识别的信号。
3. 组成此传感器由以下部分组成。
5. 函数及程序示例6.安装图示7. 注意事项1、根据它的工作原理,是光敏探头根据检测面反射回来的光线强度,来确定其检测面的颜色深浅,因此测量的准确性和传感器到检测面的距离是有直接关系的。
在机器人运动时机体的震荡同样会影响其测量精度。
2、外界光线的强弱对其影响非常大,会直接影响到检测效果,在对具体项目检测时注意包装传感器,避免外界光的干扰。
3、检测面的材质不同也会引起其返回值的差异。
使用灰度还可将彩色图稿转换为高质量黑白图稿。
在这种情况下,Adobe Illustrator 放弃原始图稿中的所有颜色信息;转换对象的灰色级别(阴影)表示原始对象的亮度。
在物体的边缘呈现灰度的不连续性,图像分割就是基于这个原理注意这个百分比是以纯黑为基准的百分比。
与RGB正好相反,百分比越高颜色越偏黑,百分比越低颜色越偏白。
3.3 寻线传感器的使用p3.3 机器人在寻线时的传感器的显示当机器人沿着线走时(在图中自下向上行驶),处于不同情形时,传感器会有不同的显示。
这里列出了5种常见情形:∙10000=机器人严重向右偏离赛道(在控制上我们就要让机器人在前进的同时向左做大幅度转动)∙01000=机器人轻微向右偏离赛道(在控制上我们就要让机器人在前进的同时向左做轻微转动)∙00100=机器人正处在赛道上(在控制上我们就要让机器人继续直线前进)∙00010=机器人轻微向左偏离赛道(在控制上我们就要让机器人在前进的同时向右做轻微转动)∙00001=机器人严重向左偏离赛道(在控制上我们就要让机器人在前进的同时向右做大幅度转动)通过传感器对不同情形的反馈,就可以确保机器人准确的沿着赛道前进。
检测地面灰度并把黑色的预设值大于180,白色值为80左右,在程序设计时,取80-180的中间值130作为判断黑白色的条件,即灰度传感器测得的值小于130,则是白色;测得的值大于130,则为黑色。
在机器人底部左侧安装一个地面灰度传感器并固定好且离地面5mm~10mm,左侧传感器接口接在模拟口4上。
打开编程软件,拖拽“条件循环”到流程图区“主程序”下并设置为“永远循环”,拖拽“条件判断”到永远循环体内。
双击“条件判断”,设置增加条件模拟输入大于130。
拖拽“移动”,放置在“条件判断”的“YES”分支下,设置向右转;拖拽“移动”到“条件判断”的“NO”分支下,并设置向左转。
也就是把灰度传感器检测到白色向左转,当灰度没有检测到黑色时,机器人右转,这样机器人一直走蛇形路线。
直到终点为止,如图7-3所示。
双地面灰度骑线法在机器人底部左右两侧安装两个地面灰度传感器并固定好且离地面5mm~10mm,左、右两侧传感器接口分别是模拟口4、3。
图7-3 单灰度传感器寻迹流程图打开编程软件,拖拽“条件循环”到流程图区“主程序”下并设置为“永远循环”,拖拽“条件判断”到永远循环体内。
双击“条件判断”,设置模拟输入口3变量大于130时(如单灰度传感器检测方法,取80和180的中间值130作为判断黑白色的条件),拖拽“移动”到“条件判断”的“YES”分支下,设置移动为“向右转”;当右侧地面灰度检测到黑线,机器人右转拖拽“条件判断”到第一个“条件判断”NO分支里,双击第二个“条件判断”,设置变量模拟输入口4的值大于130,拖拽“移动”模块到第二个“条件判断”YES分支里,并设置为向左转。
拖拽“移动”模块到第二个“条件判断”到NO分支里,设置该“移动”模块左右电机值各为30。
当机器人左侧检测到黑线机器人向右转,如果左、右两侧都没有检测到黑线,那么这时机器人正行驶在黑线的正上方,则直行,如图7-4所示。
图7-4 骑线法流程图图7-5 压线法流程图三个地面灰度压线法在骑线法的基础上,在机器人的中部安装第三只地面灰度传感器,左、中、右三个地面灰度传感器分别连接主机模拟口5、4、3上并连接正确。
在放置机器人的时候,把中间的灰度传感器压在黑线上,左右两侧的灰度传感器分别位于黑线两侧。
打开机器人编程软件,拖拽“条件循环”到“主程序”里,并设置为“永远循环”。
拖拽“条件判断”到“永远循环”内,双击“条件判断”并进行设置,增加条件模拟口4变量大于130,再选择增加条件模拟口3变量小于130,当单击增加条件时,弹出窗口“和”或“或者”,选择“和”,同样增加模拟口5变量小于130,选择“和”,拖拽“移动”到“条件判断”的“YES”分支下,并设置为“前进”,也就是当中间的灰度检测到黑线且同时满足左右两侧检测的是白色时直行。
拖拽“条件判断”到第一个“条件判断”的“NO”分支下并设置,增加条件当模拟口5变量大于130,拖拽“移动”并设置为“向左转”。
当左侧检测到黑线时,机器人向左转。
拖拽“条件判断”到第二个“条件判断”的“NO”分支下并设置,增加条件当模拟口3变量大于130,拖拽“移动”并设置为“向右转”。
当机器人检测到黑线时,机器人向右转。
机器人安装第一步:按第3课将机器人安装好第二步:灰度传感器的安装图7-6注意:传感器半径调节为3.图7-7装上两个灰度传感器,左边端口为5,右边为4.场地编辑这个场地涉及到地面黑线纹理,我们现在widows 自带的画图工具面要把场地的黑线先画好。