can_ppt
合集下载
CAN通信技术解析_PPT模板.pptx

随着科技的发展,CAN通信 将进一步提高传输速率,增 强系统的安全性和稳定性, 未来在更多领域得到应用。
谢谢大家
CAN通信的错误检测 与处理
CAN通信具有强大的错误检 测和处理能力,能够自动重 发错误帧,保证数据的完整 性和系统的稳定性。
03 CAN通信的主要特 点
CAN通信的主要特点
CAN通信的实时性
CAN通信具有出色的实时性 ,其传输速度快,延迟低, 可以满足实时控制系统的需 求。
CAN通信的容错性
CAN通信具有强大的容错能 力,即使在网络中出现错误 的数据帧,也能通过错误检 测机制进行自我修复。
在工业自动化领域,CAN通信被广泛应用于生产
适性。
线控制、设备监控等环节,提高了生产效率和设
备运行的稳定性。 3 CAN通信在医疗设备中的实践
在医疗设备中,CAN通信可以实现设备的远程监
控和数据共享,为医疗诊断和治疗提供了便利。
05 CAN通信的发展趋 势
CAN通信的发展趋势
CAN通信的技术进步
动机控制、刹车控制、空调控制等,实现各个系
统之工作原 理
CAN通信的工作原理
CAN通信的基本原理
CAN通信是一种串行双线制 通信协议,通过数据帧的形 式进行信息传递,具有高可 靠性、实时性和灵活性。
CAN通信的数据帧结 构
CAN通信的数据帧由起始位 、仲裁域、控制域、数据域 和校验域组成,各部分有其 特定的作用和格式,保证了 信息的准确传输。
CAN通信,全称Controller Area Network,是
CAN通信的特点
2
一种高效的车辆内部通信网络,主要应用于汽车
CAN通信具有实时性强、传输速度快、可靠性高
can的用法 ppt课件

后跟动词原形的词:
let
让…
Let’s …. =Let us …. 让我们来….
Let’s clean the classroom. Let’s go to the playground.
Let me …. 让我来….
Let me clean the blackboard. Let me help you.
3. I liked winter because I _c_o_u_ld__ go ice-skating outside.
2. canБайду номын сангаас变化
否定
can
can’t
过去式
过去式
could couldn’t
否定
_动__词_原_形_
用所给单词的正确形式填空。
1. I couldn’t _r_i_d_e_ (ride) a bike before.
2. I _c_ou_l_dn_’_t (can) speak English 4 years ago,
but now I _c_a_n_(can) speak English very well. 3. Chen Jie can _p_l_a_y_(play) the pipa.
She _p_la_y_s_(play) the pipa every weekend. Listen! She is _p_la_y_i_ng_(play) the pipa now.
后跟动词原形的词: can
must
必须
In the USA people on bikes must wear one.
You must stop at a red light.
should
小学情态动词Can的语法讲解ppt课件
.
2
教学目标: 1.能掌握情态动词can的基本句型变化 2.能灵活做题 3.重点:can+v.原形 4.难点:能灵活做题
.
3
情态动词can的用法:
• 情态动词本身有一定的语义,表示说话人 的情绪、态度或语气。没有人称和数的变 化,can表示“能、会”,后接动词的原形。 如:
• I can sing.
练习: 肯定陈述句 否定陈述句
2. 你会骑马 You can___r_id_e___(ride)a horse.
You can’t ride a horse.
一般疑问句
Can you ride a horse?
肯定回答
Yes,I can.
否定回答
No,I can’t. .
7
3.Lingling会游泳
.
11
练习:
一、把下列句子变为ቤተ መጻሕፍቲ ባይዱ定句。
• 1、Lingling can ride a horse. • 2、He can speak Chinese. • 3、Lingling and Daming can play the piano. • 4、My father can play table tennis. • 5、She can swim.
1.肯定句变否定句直接在can后加not,缩写为can’t。
如:I can read. →I can’t read.
2.陈述句变一般疑问句直接把can提前,其它不变照抄 如: She can swim. →Can she swim ? 肯定回答: Yes,主语+can. 否定回答: No,主语+can’t.
一般疑问句: Can you play the pipa?
车载网络技术PPT课件(共8章)第2章 CAN总线
(3)波分多路复用
波分多路复用 WDM(Wave-length Division Multiplexing)是指在光波频 率范围内,将不同波长的光波按照一定的时间间隔在同一条光导纤维内进行数据 传输的技术。
2.2 CAN总线的工作原理
2.2.1 CAN总线简介
CAN是Controller Area Network(控制器局域网)的缩写,是国际标准化 的串行通信协议。目前,CAN总线是汽车网络系统中应用最多、也最为普遍的一 种总线技术。
图2-8 计算机系统内总线线路的示意图 1—地址总线;2—数据总线;3—控制总线;CPU—中央处理器;
ROM—只读存储器;RAM—随机存储器;I—输入;O—输出
图2-9 车用计算机(电子控制单元)电路板 1—输出模块;2—输入模块;3—存储器模块;4—微处理器; 5—线圈;6—电容器;7—二极管;8—特殊模块 (特定应用)
第2章 CAN总线
2.1 数据信号及其传输
2.1.1数制 在计算机和数据传输技术中有三种重要数制,即十进制、二进制、十六进制。
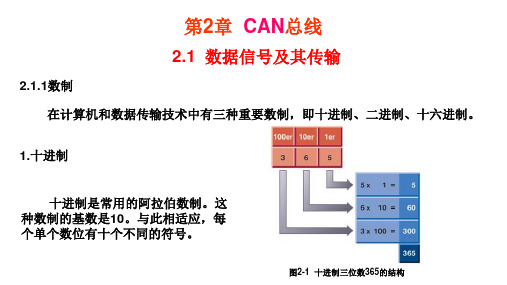
1.十进制
十进制是常用的阿拉伯数制。这 种数制的基数是10。与此相适应,每 个单个数位有十个不同的符号。
图2-1 十进制三位数365的结构
2.二进制
二进制是数据处理中最常用的数制之一。在二进制中只有两个数字值:0 和1, 或接通或关闭,或高电压或低电压,即所谓的二进制符号或位。在通信领域,也把这 两个值称为逻辑0和逻辑1。
数字表示方式就是以数字形式表
示不断变化的物理量。尤其在计算机 内,所有数据都以“0”和“1”的序列 形式表示出来(二进制)。因此, “数字”是“模拟”的对立形式。
图2-4 数字信号 U—电压;t—时间
3.二进制信号
波分多路复用 WDM(Wave-length Division Multiplexing)是指在光波频 率范围内,将不同波长的光波按照一定的时间间隔在同一条光导纤维内进行数据 传输的技术。
2.2 CAN总线的工作原理
2.2.1 CAN总线简介
CAN是Controller Area Network(控制器局域网)的缩写,是国际标准化 的串行通信协议。目前,CAN总线是汽车网络系统中应用最多、也最为普遍的一 种总线技术。
图2-8 计算机系统内总线线路的示意图 1—地址总线;2—数据总线;3—控制总线;CPU—中央处理器;
ROM—只读存储器;RAM—随机存储器;I—输入;O—输出
图2-9 车用计算机(电子控制单元)电路板 1—输出模块;2—输入模块;3—存储器模块;4—微处理器; 5—线圈;6—电容器;7—二极管;8—特殊模块 (特定应用)
第2章 CAN总线
2.1 数据信号及其传输
2.1.1数制 在计算机和数据传输技术中有三种重要数制,即十进制、二进制、十六进制。
1.十进制
十进制是常用的阿拉伯数制。这 种数制的基数是10。与此相适应,每 个单个数位有十个不同的符号。
图2-1 十进制三位数365的结构
2.二进制
二进制是数据处理中最常用的数制之一。在二进制中只有两个数字值:0 和1, 或接通或关闭,或高电压或低电压,即所谓的二进制符号或位。在通信领域,也把这 两个值称为逻辑0和逻辑1。
数字表示方式就是以数字形式表
示不断变化的物理量。尤其在计算机 内,所有数据都以“0”和“1”的序列 形式表示出来(二进制)。因此, “数字”是“模拟”的对立形式。
图2-4 数字信号 U—电压;t—时间
3.二进制信号
can 的用法课件

❖ 3. 有can的句子变___否___定____句__,在can后加not, 即:can not=c__a__n_’_t, 意思:不能 / 不会。
❖
4.
有can的句子变__一___般___疑___问___句_ ,
把can放句首。 ———————
Can 的肯定句
run fast
(跑得快)
He is Liuxiang. He can run. He can run fast.
Look at the boy, he can swim.
Look at that boy , he can’t swim.
Look at the dog, it can run fast.
Look at the turtle, it can’t run fast.
Look at the kids, they can skate.
Amy: Sam, can the bear ride a bike?
Sam: Yes,it can. Look, the bear can ride a bike.
Amy: Hahaha…
❖ 小 结: can的一般疑问句结构: Can + 主语 + 动词原形? Yes,主语+can. No, 主语+can’t.
Fill in the blanks with “can”or “can’t”.
❖ 1)The dog__c_a_n__ swim,It _c_a_n__ run,too. ❖ 2)The cat __c_a_n__ jump, but it _c_a_n_’t_ fly. ❖ 3)The fish _ca_n_’_t_ run,but it __c_a_n_ swim. ❖ 4)Liuxiang __c_a_n___run fast. ❖ 5)Deng Ziqi is a singer.She _c_a_n_ sing. ❖ 6)I__c_a_n_ride a bike. I __ca_n_’_tfly.
❖
4.
有can的句子变__一___般___疑___问___句_ ,
把can放句首。 ———————
Can 的肯定句
run fast
(跑得快)
He is Liuxiang. He can run. He can run fast.
Look at the boy, he can swim.
Look at that boy , he can’t swim.
Look at the dog, it can run fast.
Look at the turtle, it can’t run fast.
Look at the kids, they can skate.
Amy: Sam, can the bear ride a bike?
Sam: Yes,it can. Look, the bear can ride a bike.
Amy: Hahaha…
❖ 小 结: can的一般疑问句结构: Can + 主语 + 动词原形? Yes,主语+can. No, 主语+can’t.
Fill in the blanks with “can”or “can’t”.
❖ 1)The dog__c_a_n__ swim,It _c_a_n__ run,too. ❖ 2)The cat __c_a_n__ jump, but it _c_a_n_’t_ fly. ❖ 3)The fish _ca_n_’_t_ run,but it __c_a_n_ swim. ❖ 4)Liuxiang __c_a_n___run fast. ❖ 5)Deng Ziqi is a singer.She _c_a_n_ sing. ❖ 6)I__c_a_n_ride a bike. I __ca_n_’_tfly.
CAN总线详细教程,精心编制,不可错过(共51张PPT)

集中控制系统:由一个电子控制单元(ECU)同时控制多 个工作装置或系统的电子控制系统。如汽车底盘控制系统。
控制器局域网络系统(CAN总线系统):由多个电子控制
单元(ECU)同时控制多个工作装置或系统,各控制单元 (ECU)的共用信息通过总线互相传递。
带有中央控制单元的车
带有三个中央控制单元的车
带有三个中央控制单元和总线系统的车
带有三个中央控制单元的CAN驱动网络
车用网络发展原因
电子技术发展----线束增加
线控系统(X-BY-WIRE) 计算机网络的广泛应用
智能交通系统的应用
汽车发展带来的问题
(1)汽车电子技术的发展汽车上电子装置越来越多 汽车的整体布置空间缩小
(2)传统电器设备多为点到点通信导致了庞大的线束 (3)大量的连接器导致可靠性降低。
Canbus的发展历史
大众公司首次在97年PASSAT的舒适系统上采 2001年,大众公司提高了Canbus的设计标
用了传送速率为62.5Kbit/m的Canbus。
准,将舒适系统Canbus提高到100Kbit/m,
驱动系统提高到500Kbit/m。
98年在PASSAT和GOLF的驱动系统上 增加了Canbus,传送速率为 500Kbit/m。
法拉利的虚拟仪表盘
汽车网络化的优点
布线简单,设计简化,节约铜材,降低成本。
可靠性提高,可维护性大为提高
实现信息共享,提高汽车性能
满足现代汽车电子设备种类功能越来越多的要 求
总之,使用汽车网络不仅可以减少线束,而且能够 提高各控制系统的运行可靠性,减少冗余的传感器 及相应的软硬件配置,实现各子系统之间的资源共 享,便于集中实现各子系统的在线故障诊断。
2. 技术规范的目的是为了在任何两个CAN仪器之间建立兼容性。可是, 兼容性有不同的方面,比如电气特性和数据转换的解释。为了达到 设计透明度以及实现灵活性,根据ISO/OSI参考模型,规范细分为以 下不同的层次:数据链路层和物理层(如图所示)。
控制器局域网络系统(CAN总线系统):由多个电子控制
单元(ECU)同时控制多个工作装置或系统,各控制单元 (ECU)的共用信息通过总线互相传递。
带有中央控制单元的车
带有三个中央控制单元的车
带有三个中央控制单元和总线系统的车
带有三个中央控制单元的CAN驱动网络
车用网络发展原因
电子技术发展----线束增加
线控系统(X-BY-WIRE) 计算机网络的广泛应用
智能交通系统的应用
汽车发展带来的问题
(1)汽车电子技术的发展汽车上电子装置越来越多 汽车的整体布置空间缩小
(2)传统电器设备多为点到点通信导致了庞大的线束 (3)大量的连接器导致可靠性降低。
Canbus的发展历史
大众公司首次在97年PASSAT的舒适系统上采 2001年,大众公司提高了Canbus的设计标
用了传送速率为62.5Kbit/m的Canbus。
准,将舒适系统Canbus提高到100Kbit/m,
驱动系统提高到500Kbit/m。
98年在PASSAT和GOLF的驱动系统上 增加了Canbus,传送速率为 500Kbit/m。
法拉利的虚拟仪表盘
汽车网络化的优点
布线简单,设计简化,节约铜材,降低成本。
可靠性提高,可维护性大为提高
实现信息共享,提高汽车性能
满足现代汽车电子设备种类功能越来越多的要 求
总之,使用汽车网络不仅可以减少线束,而且能够 提高各控制系统的运行可靠性,减少冗余的传感器 及相应的软硬件配置,实现各子系统之间的资源共 享,便于集中实现各子系统的在线故障诊断。
2. 技术规范的目的是为了在任何两个CAN仪器之间建立兼容性。可是, 兼容性有不同的方面,比如电气特性和数据转换的解释。为了达到 设计透明度以及实现灵活性,根据ISO/OSI参考模型,规范细分为以 下不同的层次:数据链路层和物理层(如图所示)。
CAN总线故障案例ppt课件
CAN 总线数据传输速率 根据实时控制的需要,可以给CAN总线设置成不同的通讯速度,对应
地,汽车的CAN总线网络便可以分成两个通讯网络: - 低速网 通讯速度不大于125K bps,目前常用的在100K bps,主要用于中央门
锁,自动门窗,自动空调,汽车定位等舒适系统。 - 高速网 通讯速度可达1M bps,目前常用的在500K bps,主要用于汽车动力控
在总线仲裁中失败的单元,会 自动返回到等待状态,一旦总线空
闲时再次重复发送传输请求。
.
二、车载CAN总线与多路信息传输系统简要介绍
相关介绍: CAN 总线数据格式
采用数据帧格式向总线可传送每一 帧低于130位的数据。
采用这种方式可以使下一次有可能 非常紧急的数据传输排队等待时间最短 。
每段数据包含有不同内容的数据区 。
汽车维修案例
总线通讯错误致发动机无法起动的
故障案例分析
.
一、车型故障资料
故障车型情况
一辆2004年款帕萨特B5 1.8T轿车,行驶6万公 里,使用期2年。该车在高速公路行驶时发生交通事 故,事故处理持续了3个多月时间,处理完毕后将事 故车拉到定点汽车修理厂进行碰撞修复工作。修复 后,发现发动机无法正常运行,在发动机起动2秒钟 后就自动熄火。这种现象很象防盗报警系统启动了, 但是防盗报警灯却始终没有点亮,也无法重新对防 盗系统进行匹配。车主反映事故发生后发动机是能 够起动运行的,现在事故修好了,发动机倒不能起 动了,于是产生维修纠纷。.
LIN – 通讯在醒来的舒适系统CAN有效。在通讯断开时 (拔下插头 , 通讯参与者的供电断路) 主控制单元里产生一个故. 障存储!
二、车载CAN总线与多路信息传输系统简要介绍
LIN总线:驱动器物理结构
地,汽车的CAN总线网络便可以分成两个通讯网络: - 低速网 通讯速度不大于125K bps,目前常用的在100K bps,主要用于中央门
锁,自动门窗,自动空调,汽车定位等舒适系统。 - 高速网 通讯速度可达1M bps,目前常用的在500K bps,主要用于汽车动力控
在总线仲裁中失败的单元,会 自动返回到等待状态,一旦总线空
闲时再次重复发送传输请求。
.
二、车载CAN总线与多路信息传输系统简要介绍
相关介绍: CAN 总线数据格式
采用数据帧格式向总线可传送每一 帧低于130位的数据。
采用这种方式可以使下一次有可能 非常紧急的数据传输排队等待时间最短 。
每段数据包含有不同内容的数据区 。
汽车维修案例
总线通讯错误致发动机无法起动的
故障案例分析
.
一、车型故障资料
故障车型情况
一辆2004年款帕萨特B5 1.8T轿车,行驶6万公 里,使用期2年。该车在高速公路行驶时发生交通事 故,事故处理持续了3个多月时间,处理完毕后将事 故车拉到定点汽车修理厂进行碰撞修复工作。修复 后,发现发动机无法正常运行,在发动机起动2秒钟 后就自动熄火。这种现象很象防盗报警系统启动了, 但是防盗报警灯却始终没有点亮,也无法重新对防 盗系统进行匹配。车主反映事故发生后发动机是能 够起动运行的,现在事故修好了,发动机倒不能起 动了,于是产生维修纠纷。.
LIN – 通讯在醒来的舒适系统CAN有效。在通讯断开时 (拔下插头 , 通讯参与者的供电断路) 主控制单元里产生一个故. 障存储!
二、车载CAN总线与多路信息传输系统简要介绍
LIN总线:驱动器物理结构
can i课件ppt

CAN I软件的工作原理
01
用户通过CAN I软件提 供的工具和资源,进行 课件制作和管理。
ห้องสมุดไป่ตู้02
课件编辑器将各种媒体 元素整合在一起,形成 完整的课件内容。
03
课件管理模块负责课件 的存储和发布,方便用 户进行管理和分享。
04
互动教学模块通过在线 测试、讨论等功能,实 现师生之间的实时互动 和交流。
03
CAN I的硬件介绍
CAN I硬件的组成
01
02
03
04
控制器
CAN I的核心部件,负责接收 和发送数据,控制整个硬件的
工作流程。
存储器
用于存储程序代码和数据,保 证CAN I的正常运行。
输入输出接口
连接外部设备和CAN I硬件, 实现数据交换。
电源模块
提供稳定的电源,保证CAN I 硬件的正常工作。
CAN I在工业自动化行业的应用
自动化生产线控制
CAN I可以应用于自动化生产线 的控制系统中,实现生产流程的
自动化和高效化。
机器人控制系统
CAN I可以连接机器人控制器和传 感器,实现机器人的精确控制和数 据传输。
能源管理系统
CAN I可以应用于能源管理系统中 ,实现能源的智能化监测、控制和 管理,降低能源消耗和成本。
04
CAN I的软件介绍
CAN I软件的组成
用户界面
提供友好的操作界面,方便用户进行课件制 作和管理。
课件管理模块
提供课件的上传、下载、发布、更新等功能 。
课件编辑器
支持多种媒体元素(如文本、图片、音频、 视频等)的编辑和整合。
互动教学模块
支持在线测试、讨论、互动问答等功能,提 升学生学习兴趣和参与度。
CAN总线传输原理

• 在接收过程中,这些电压值经收发器又转换成比 特流,再经RX线(接收线)传至控制单元,控制单 元将这些二进制连续值转换成信息。
• 每个控制单元均可接收发送出的信息。这种原理 称为广播。
第12页/共41页
2.1.1 信息交换
第13页/共41页
第2章 CAN总线传输原理
• 2.1.2 功能元件
• 1.控制单元
• 基本车载网络系统由多个控制单元组成,这些控制单元通 过收发器(发射一接收放大器)并联在总线导线上,所有控 制单元的地位均相同,没有哪个控制单元有特权。称为多 主机结构。
• 数据传输总线采用一条导线或二条导线 ,第二条导线上 传输信号与第一条导线上的传输信号成镜像关系,这样可 有效抑制外部干扰。
第11页/共41页
过监控层内的CRC校验(“循环冗余码校验” )和数来确定 是否有传递错误。如果确定无传递错误,那么连接的所有装 置会给发射器一个确认回答(ACK )。 • (3)信息接受 • 己接收到的正确信息会到达相关数据传输总线构件的接受区。 在那里来决定该信息是否用于完成各控制单元的功能。如果 不是,该信息就被拒收。如果是,该信息就会进入相应的接 收邮箱。 • 组合仪表调出该信息并将相应的值复制到它的输入存储器内。 在组合仪表内,转速经微控制器处理后控制转速表显示相应 的转速。
第2章 CAN总线传输原理
• 2.1.1 信息交换
• 用于交换的数据称为信息,每个控制单元均可发 送和接收信息。二进制数据流也称为比特流。
•线(发送线)到达收发器(放大 器),收发器将比特流转化成相应的电压值,最后 这些电压值按时间顺序依次被传送到数据传输总 线的导线上。
• 2)该转速值就被复制到发动机控制单元的发送存储器内。 • 3)该信息从发送存储器进入数据传输总线构件的发送邮
• 每个控制单元均可接收发送出的信息。这种原理 称为广播。
第12页/共41页
2.1.1 信息交换
第13页/共41页
第2章 CAN总线传输原理
• 2.1.2 功能元件
• 1.控制单元
• 基本车载网络系统由多个控制单元组成,这些控制单元通 过收发器(发射一接收放大器)并联在总线导线上,所有控 制单元的地位均相同,没有哪个控制单元有特权。称为多 主机结构。
• 数据传输总线采用一条导线或二条导线 ,第二条导线上 传输信号与第一条导线上的传输信号成镜像关系,这样可 有效抑制外部干扰。
第11页/共41页
过监控层内的CRC校验(“循环冗余码校验” )和数来确定 是否有传递错误。如果确定无传递错误,那么连接的所有装 置会给发射器一个确认回答(ACK )。 • (3)信息接受 • 己接收到的正确信息会到达相关数据传输总线构件的接受区。 在那里来决定该信息是否用于完成各控制单元的功能。如果 不是,该信息就被拒收。如果是,该信息就会进入相应的接 收邮箱。 • 组合仪表调出该信息并将相应的值复制到它的输入存储器内。 在组合仪表内,转速经微控制器处理后控制转速表显示相应 的转速。
第2章 CAN总线传输原理
• 2.1.1 信息交换
• 用于交换的数据称为信息,每个控制单元均可发 送和接收信息。二进制数据流也称为比特流。
•线(发送线)到达收发器(放大 器),收发器将比特流转化成相应的电压值,最后 这些电压值按时间顺序依次被传送到数据传输总 线的导线上。
• 2)该转速值就被复制到发动机控制单元的发送存储器内。 • 3)该信息从发送存储器进入数据传输总线构件的发送邮
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Clustering and Projected Clustering with Adaptive Neighbors
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
n sT i 1=1,0≤si ≤1
min
xi − xj
j =1
2 2 sij
(1.2)
Feiping Nie, Xiaoqian Wang, Heng Huang
Clustering and Projected Clustering with Adaptive Neighbors
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
min
xi − xj
j =1
2 2 sij
+ γs2 ij
(1.3)
where γ is a parameter to balance the two terms.
2 x n×1 as a vector Denote dx ij = xi − xj 2 , and denote di ∈ R with the j -th element as dx ij , then the problem (1.3) can be written in vector form as
Feiping Nie, Xiaoqian Wang, Heng Huang
Department of Computer Science and Engineering, University of Texas, Arlington, USA
August 25, 2014
Feiping Nie, Xiaoqian Wang, Heng Huang
2
3
4
5
Feiping Nie, Xiaoqian Wang, Heng Huang
Clustering and Projected Clustering with Adaptive Neighbors
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
Computing the Probabilistic Neighbors
Combining the two rules, the probabilistic neighbors of xi can be computed by solving the following problem:
n sT i 1=1,0≤si ≤1
n sT i 1=1,0≤siБайду номын сангаас≤1
min
s2 ij
j =1
(1.1)
A smaller distance xi − xj 2 2 should be assigned a larger probability sij . It can be achieved by solving the following problem:
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
Clustering and Projected Clustering with Adaptive Neighbors
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
Probabilistic Neighbors Assignment for All the Data
n S ∈Rn×n i,j =1 s.t. ∀i, sT i 1
min
xi − xj
2 2 sij
+ γs2 ij
(2.2)
= 1, 0 ≤ si ≤ 1, S ∈ Ω
Feiping Nie, Xiaoqian Wang, Heng Huang
Clustering and Projected Clustering with Adaptive Neighbors
The problem (2.2) is very difficult to solve since the constraint S ∈ Ω is involved. We propose a novel algorithm as follows to solve this challenge. More details can be found in the paper. Optimization Algorithm for the Problem (2.2) Input: Data matrix X ∈ Rn×d , cluster number c, parameter γ , a large enough λ. Output: S ∈ Rn×n with exact c connected components. 1. Initialize S by the optimal solution to the problem (2.1). 2. Update F , which is formed by the c eigenvectors of T +S LS = D S − S 2 corresponding to the c smallest eigenvalues. 3. For each i, update the i-th row of S by solving the problem similar to (1.4). 4. Iteratively perform 2-3 until converges.
n ∀i,sT i 1=1,0≤si ≤1
min
xi − xj
i,j =1
2 2 sij
+ γs2 ij
(2.1)
The obtained matrix S can be seen as a similarity matrix. However, the matrix S can not directly used for clustering, since in most cases the data are all connected with the S .
Deterministic Neighbors and Probabilistic Neighbors
Exploring the local connectivity of data is a successful strategy for clustering task, e.g., spectral clustering. For the i-th data point xi , all the data points {x1 , x2 , ..., xn } can be connected to xi as a neighbor with a weight sij . Deterministic Neighbors. The weights sij have only two values: 0 or 1. Probabilistic Neighbors. The weights sij have probabilistic n×1 is a vector with values: sT i 1 = 1, 0 ≤ si ≤ 1, where si ∈ R the j -th element as sij .
sT i 1=1,0≤si ≤1
min
1 x si + d 2γ i
2
(1.4)
2
This problem can be solved with a closed form solution.
Feiping Nie, Xiaoqian Wang, Heng Huang Clustering and Projected Clustering with Adaptive Neighbors
Feiping Nie, Xiaoqian Wang, Heng Huang
Clustering and Projected Clustering with Adaptive Neighbors
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
Probabilistic Neighbors Clustering with Adaptive Neighbors Projected Clustering with Adaptive Neighbors (PCAN) Experimental R
The CAN Clustering Algorithm
Rules for Computing the Probabilistic Neighbors
If there is no any distance information in the data, as a prior, all the data points can be the neighbors of xi with the same 1 probability n . It can be achieved by solving the following problem: