APH00UWB模块TWR双边测距协议定位帧基本结构-研创物联
uwb 单位000 射频电路 解读

UWB射频电路解读UWB(Ultra Wide Band)是指超宽带技术,它是一种能够在较宽频带范围内传输信息的无线通信技术。
UWB技术的发展,为无线通信领域带来了颠覆性的革新,广泛应用于雷达、无线传感器网络、医疗设备、汽车电子、室内定位导航等领域。
在UWB技术的背后,射频电路起着至关重要的作用,它是UWB信号调制解调、传输和接收的核心部分。
本文将从UWB技术的基本概念出发,深入解读UWB射频电路的原理、特点和应用。
1. UWB技术概览UWB技术是指信号带宽占用超过20%的无线通信技术,能够实现高速数据传输和精准定位。
UWB技术的特点是具有极高的频率利用率、抗干扰能力强、穿透障碍物能力强等。
在UWB通信系统中,射频电路是实现UWB信号发射和接收的重要组成部分。
2. UWB射频电路的原理UWB射频电路主要包括UWB信号的发射和接收两个部分。
在UWB信号的发射端,射频源产生宽带信号,并经过功率放大和滤波等环节,将信号发射至空中。
在UWB信号的接收端,射频电路接收到空中传来的UWB信号,并经过信号放大、滤波、解调等处理,最终将信号还原为原始信息。
3. UWB射频电路的特点UWB射频电路的特点主要体现在以下几个方面:a. 宽带性能:UWB射频电路需要支持带宽大、中心频率低的特点,能够满足UWB信号的传输要求。
b. 抗干扰能力:UWB射频电路需要具备强大的抗干扰能力,能够在复杂的信道环境下保持通信质量稳定。
c. 低功耗:UWB射频电路需要在实现高性能的尽可能降低功耗,以满足无线通信设备对电能的要求。
4. UWB射频电路的应用UWB射频电路广泛应用于各种UWB通信系统中,如室内定位、无线传感器网络、雷达测距、车联网等领域。
其中,UWB室内定位系统能够实现室内精确定位,为室内导航、物联网等应用提供了技术支持;UWB雷达系统能够实现高精度的距离测量和目标识别,被广泛应用于军事、民用测绘等领域。
总结回顾本文从UWB技术的概念出发,深入解读了UWB射频电路的原理、特点和应用。
UWB超宽带无线定位系统研究与设计

2020年第08期86UWB 超宽带无线定位系统研究与设计陶 凯华北电力大学,北京 102206摘要:文章以高精度定位需求为出发点,结合泛在电力物联网建设思想,采用 DecaWave 公司的 DW1000作为UWB( Ultra -Wide Band,超宽带) 无线收发器,ST 公司的 STM32单片机作为定位系统的核心控制器,设计了UWB 定位系统基站标签一体化的硬件平台。
该平台可应用于电厂连续堆取料的斗轮机等高效装卸机械作业中,实现电厂堆取料作业的自动化。
在软件算法实现上,采用双向测距的机制准确估计基站(anchor)与标签(tag)之间的距离,通过下位机的硬件模块将测距信息发送给上位机进行处理。
上位机软件根据飞行时间(TOA -Time of Flight)定位算法计算标签与基站的距离,利用多个距离数据可计算出目标标签在三维空间中的坐标值。
此外,在坐标运算过程中采用改进的泰勒算法进行误差消除,从而完成高精度室内定位系统的设计与实现。
关键词:无线定位;UWB;飞行时间;定位系统;双向测距中图分类号:TN925.930 引言在巨大的市场需求的驱动作用下,建立室内实时定位系统(Real Time Location Systems,RTLS)[1]成为目前研究的焦点。
在定位系统的研究与设计中,UWB(Ultra -wideband,超宽带)技术已经在无线通信领域应用得极为广泛[2]。
相比于其他的传统无线信号,超宽带技术信号拥有更大的带宽,其频率范围在3.1 GHz~10.6 GHz [3]。
同时,超宽带技术信号具有非常低的功率谱密度、高的时间分辨率[4]和良好的抗多径能力[5]。
因此,采用 UWB 技术的室内定位系统具有很高的实用价值。
在UWB 定位系统中,无线收发数据的芯片主要使用的是来自著名公司DecaWave 的产品——DW1000(超宽带无线收发芯片),该芯片根据基站与标签之间无线信号在空气中传播的时间(即飞行时间)来计算出该组物体之间的间隔距离,使用的测距算法为双边双向测距算法(dual -Sided Two -wayrange,DS -TWR)。
研创物联 UWB Tag 手持器使用手册说明书
研创物联UWB Tag 手持器User GuideVersion V1.0温州市研创物联网科技有限公司地址:浙江省温州市瓯海区茶山高教园区高科路 技术热线/微信:156****0772QQ :171932915淘宝店:https:///研创物联UWB Tag 手持器使用手册目录简介2 UWB M INI 3模块介绍2 UWB N ANO模块介绍3开发环境介绍3专业术语表3TOF M ESSAGE R EPORT 串口数据解析5 T RILATERATION算法计算5 OLED液晶显示6连接UWB 模块7手持器供电7 T AG录入基站坐标信息7测试结果8开发软件9安装KEIL59打开工程10编译与下载10©温州市研创物联网科技有限公司2017Page 1研创物联UWB Tag 手持器开发板介绍简介UWB Tag 手持器开发板,旨在实现将UWB Mini 3模块 或UWB Nano X1模块 从串口输出的TOF Report Message 数据按照一定的格式进行解析,结合研创物联独家Trilateration 三边定位算法,简化数学运算真正实现在STM32F103C8T6单片机(嵌入式系统)上对测距数据的实时解算,并且将坐标计算结果X ,Y ,Z 显示在OLED 上。
STM32F103C8T6单片机在没有DSP 库及FPU 浮点运算的支持下,依旧能够做到5ms 解算一次坐标,该算法计算巧妙,调用简单,能够最大限度地缩短解算时间。
该功能适用于现场没有PC 电脑但是需要显示定位信息的应用场合,例如:高速公路、工厂、沙漠、矿井、无人机等。
图1.1 UWB Tag 手持器开发板实物图UWB Mini 3模块介绍UWB Mini 3模块采用STM32F105单片机为主控芯片。
外围电路包括:DWM1000模块、电源模块、LED 指示模块、拨码开关、复位电路等。
该模块既可以作为基站,也可以作为标签,通过拨码开关进行切换。
研创物联 UWB Mini4sPlus 使用手册说明书

研创物联UWB系列开发板Mi n i4sP lu s开发板- 操作使用手册Version 1.1 (2019.04.04)目录研创物联定位开发套件及配件介绍 (3)研创UWB系列产品 (3)研创物联UWB系列模块详细参数对比 (3)模块介绍 (3)应用场合 (4)国内外室内定位技术的优缺点 (4)专业术语表 (5)主要参数 (6)出厂程序固件 (6)硬件参数 (6)硬件IO分配一览 (6)实测频谱 (7)研创UWB产品能用在哪些场合? (8)国内外主流室内定位技术的优缺点? (8)常见技术问题问答 (9)原理 (9)使用 (9)UWB MINI4sPlus定位套件测试说明 (10)模式配置 (10)定位测试:3基站+1标签测试 (10)定位测试:4基站+多标签测试 (12)测距测试:1基站+3标签测试 (13)研创定位系统数据入网解决方案简介 (14)概述 (14)模块二次开发 (15)开发环境和工具 (15)固件更新 (15)从串口输出数据的方法 (15)从USB虚拟串口输出数据的方法 (16)PC上位机通讯数据格式与二次开发 (18)实时定位系统上位机简介 (18)实时定位系统上位机界面 (18)数据帧TOF Report Message (20)日志文件Log Files (21)三边定位法Trilateration的原理与计算方法 (21)UWB产品化开发 (23)数据标定方法 (23)进一步提升测距刷新速率的方法 (23)进一步提升定位刷新速率的方法 (24)遮挡对室内定位UWB 的影响 (24)AT指令集 (25)AT+SW指令(8标签及以下) (25)AT+QSET指令(9标签及以上) (25)文档管理信息表 (27)关于研创物联 (28)研创物联定位开发套件及配件介绍研创UWB系列产品产品级基站UWB Pro-Anc 标签UWB Pro-Tag开发板级Mini3 / Mini4开发板Mini3s 开发板Mini3sPlus/4sPlus开发板手持器 / Smartlink 模组级DWM1000-陶瓷天线(进口)DWM1000-SMA MAX2001-陶瓷天线MAX2001- SMA 芯片级DW1000 (进口)研创物联UWB系列模块详细参数对比Mini3s模块Mini3sPlus模块Mini4sPlus模块ProTag标签发行时间2016.10.2 2017.5.17 2018.8.14 2018.5.17特色性价比高距离远功耗低可充电,距离远PCB尺寸46mm * 20mm 58mm*24mm 47mm*26mm 50mm*35mm PCB板材高频4层板高频4层板高频4层板高频4层板供电接口USB/正负接线柱USB/正负接线柱USB/正负接线柱USB USB通讯接口√√√√TTL串口接口√√√√SWD下载调试接口√√√√主控芯片STM32F103T8U6 STM32F103T8U6 STM32F103C8T6 STM32F103T8U6 锂电池管理芯片××√√加速度传感器××√×天线外置棒状天线外置棒状天线陶瓷板载天线陶瓷板载天线发射功率-42dbm/Mhz -22dbm/Mhz -45dbm/Mhz -30dbm/Mhz 工作信道CH2 / CH5 CH2 CH2 CH2稳定有效覆盖半径80m 300m 30m / 500m 200m测距精确度误差<10 cm <10 cm <10 cm <10 cm定位精确度误差<15 cm <15 cm <15 cm <15 cm 模块介绍概述UWB Mini4sPlus采用“底板+模块”的架构。
立功科技UWB100 UWB模块说明书

UWB100UWB模块DS01010101 1.0.00 Date:2023/6/15——————————————概述UWB100是立功科技▪求远电子研发的一款高性能UWB超宽带模块,它同时集成了蓝牙SOC、天线、电源管理和时钟控制,以简化系统设计。
通过串口/蓝牙AT指令控制,可配置多种应用场景,如双路TOF、2D AOA;同时帮助用户绕开繁琐复杂的射频调试、参数配置、校准和PCB 调试等工作,降低开发难度,缩短产品研发周期,帮助用户加快产品上市。
——————————————产品特性◆ 3.3V供电;◆同时搭载UWB芯片和蓝牙IC;◆UWB遵守IEEE 802.15.4z和Fira协议;◆板载BLE陶瓷天线和3路UWB天线座;◆支持BLE无线通讯和UART接口通讯;◆支持单路TOF、双路TOF和2D AOA;◆尺寸:25mm × 20mm × 0.8mm;◆邮票孔:1.27mm间距。
————————————产品应用◆舞台追光灯方案;◆智能门锁方案;◆防丢器,寻物器方案;—————————————订购信息型号温度范围描述UWB100 -30°C ~ +85°C /————————————————————————————————模块展示修订历史版本日期原因V1.0.00 2022/09/25 创建文档V1.0.01 2022/10/25 更新模板V1.0.02 2023/6/15 1.表2.2增加睡眠模式功耗参数;2.表2.5增加典型性能参数。
目录1. 引脚定义 (1)1.1引脚分布 (1)1.2引脚说明 (1)1.3天线接口说明 (2)2. 电气特性 (3)2.1绝对最大额定值 (3)2.2功耗参数 (3)2.3工作条件 (3)2.4无线参数 (4)3. 典型应用电路 (5)4. 模块布局规范 (6)5. 封装尺寸 (7)6. 生产指导 (8)6.1存储与运输 (8)6.2湿敏等级 (8)6.3回流焊温度参考曲线 (8)7. 免责声明 (10)1. 引脚定义1.1 引脚分布UWB100模块采用半孔工艺,如图1.1所示,引脚说明请参考表1.1。
基于UWB技术的TW-TOF测距跟踪架构

跟踪与导航P400测距和通讯模块既支持跟踪系统,也支持导航系统。
P400测距和通讯模块是点对点的精确测距设备。
在构建定位和导航同时工作的系统时,常常需要通过另外的无线电系统把位置信息从移动设备发送给控制中心或者把控制中心所知道的移动点的位置信息发送给移动设备,P400测距和通讯模块是一个带有综合数据通信能力的射频系统,因此本征上支持这些跟踪/导航综合系统。
参照和移动节点典型的跟踪系统包含有“移动”和“参照”设备或者节点。
参照节点的(x,y,z)坐标对于定位系统来说是已知的,移动节点相对于参照点的位置是计算出来的。
当参照节点处于已知和静态的位置时,他们通常被叫做“锚”。
P400测距和通讯模块本身并不是一个跟踪系统,也不是一个导航系统。
但是作为一个点对点集成有无线通讯能力(无线通信是用来协调测距交通和传播的参照点位置数据)的射频测距设备,它为各种不同定位架构的系统提供了最大的灵活性。
测距和通讯模块用来测量以下节点之间的距离:1. 移动点和移动点(用于传播参照或者协调相对行为,例如编队和跟随)2. 移动点和参照点(用于精确定位或漂移校正)3. 参照点和参照点 (用于在设置特设“锚”,也就是参照点时达到额外的高精确度)4. 移动的参照点和移动的目标(用于自动车辆安全和态势感知 )参照节点处于静止状态时较易理解,实际上任何一个具有准确瞬间动态位置的节点都可以用来作为参考节点。
例如,GPS卫星就可以作为参照点,但是他们不是静态的。
卫星的位置不断被动态更新并且通过无线方式传送给移动的GPS接收器,GPS接收器根据收到的GPS “锚”之间的位置和延时来进行定位。
同样,在一个由测距和通讯模块RCM辅助的定位系统中,任何具有瞬时精确位置的节点都可以作为一个相对于具有不太精确的已知位置的邻居节点的参照点。
这种“传播参照点”技术可以扩展跟踪系统的监控范围,但是以传播位置误差为代价。
一般来说,系统需要周期性地通过访问一个知道准确位置的临时静态节点来限制传播误差。
研创物联 UWB DWM3220-EVK 开发板使用手册说明书

UWB DWM3220-EVK开发板使用手册V2.0目录1UWB DWM3220-EVK开发板简介 (3)1.1DWM3220-EVK系列开发板 (3)1.2TWR定位套件构成 (7)1.3PDOA定位套件构成 (7)2TWR定位套件测试说明 (9)2.1基站AT指令功能配置与设置 (9)2.2测试环境搭建 (9)2.3电脑端RTLS上位机 (10)3PDOA定位套件测试说明 (17)3.1测试环境搭建 (17)3.2电脑端RTLS上位机 (17)4固件更新 (19)4.1STM32 NUCLEO-F429ZI硬件连接 (19)4.2STLINK驱动安装 (19)4.3固件更新具体步骤 (19)5文档管理信息表 (22)1UWB DWM3220-EVK开发板简介1.1DWM3220-EVK系列开发板UWB DWM3220-EVK系列开发板,有如下3种型号,分别搭载研创自研的DWM3220-IPEX,DWM3220-CA,DWM3220-SMA模组。
模组详细信息,请用户自行参考模组手册DWM3220-EVK系列开发板由DWS3220转接板与NUCLEO-F429ZI开发板构成。
Arduino Shield转接板DWS3220见1.1.3节描述,NUCLEO-F429ZI开发板见1.1.4节描述。
+=DWS3220-CANUCLEO-F429ZIDWM3220-CA-EVK图1.1 DWM3220-EVK 开发套件UWB 硬件参数表1.1.1 UWB DWM3220-EVK 硬件参数基本参数无线参数PCB 工艺 4层板-环氧树脂 通讯速率 850 kbit/s, 6.8 Mbit/s 供电 micro-USB(5.0V) 工作频率 6.0 GHz ~ 9.0 GHz 通讯接口 micro-USB(5.0V) 工作频道 信道5,信道9 下载接口 STLINK-V2 发射功率-35dbm/MHZ ~ -62dbm/MHZ 可程控主控制器 STM32F429ZIT6 最大包长 1023字节 外部晶振8Mhz通讯距离 约30mDWS3220转接板UWB Arduino Shield 扩展板是为了方便DWM3220系列模组调试所设计的转接板,DWM3220-CA 模组对应DWS3220-CA 转接板,DWM3220-SMA 模组对应DWS3220-SMA 转接板,DWM3220-IPEX 模组对应DWS3220-IPEX 转接板,DWS3220原理图设计如图1.1.2。
uwb定位用到的协议

uwb定位用到的协议
UWB(Ultra-Wideband,超宽带)定位技术通常涉及多种协议和标准,以实现准确的室内定位和跟踪。
以下是一些常用的UWB定位用到的协议:
1. IEEE 80
2.15.4a: 这是一种无线个人局域网(WPAN)协议,它支持UWB技术,提供了在较短距离内进行高速数据传输和定位的能力。
该协议定义了UWB通信的物理层和MAC层规范。
2. Time Difference of Arrival (TDoA): TDoA是一种UWB定位系统中常用的测距技术,它利用信号到达不同接收器的时间差来计算目标位置。
通常需要在系统中使用TDoA算法来处理接收到的UWB信号。
3. Two-Way Ranging (TWR): TWR是另一种常见的UWB定位技术,它通过来回的信号传输和接收来测量信号的往返时间,从而计算出目标的位置。
TWR通常需要在UWB设备之间进行精确的时间同步。
4. 超宽带联盟(UWB Alliance): 这是一个致力于推动UWB技
术发展和标准化的组织,他们制定了一些UWB技术的标准和规范,以促进UWB在各种应用中的使用。
总的来说,UWB定位涉及的协议和技术非常多样化,涵盖了物理层、MAC层、定位算法等多个方面。
这些协议和标准的综合应用可以实现高精度的室内定位和跟踪,为物联网、智能制造、智能家居等领域提供了广阔的应用前景。
研创物联 DWM1000-SMA 说明手册说明书

DWM1000-SMA用户手册兼容DWM1000封装中程距离UWB射频模块Version V1.1易于集成,无需额外射频设计;提高企业DWM1000目录1.1DWM1000功能描述3 1.2DWM1000供电启动3 1.3SPI主机接口4 1.4通用输入输出口(GPIO)5 1.5AON存储器5 1.6一次性可编程存储器(OTP)5 1.7中断及设备状态51.8校验及检测52.1DWM1000校准63.1引脚定义73.2引脚描述74.1额定工作条件9 4.2直流特性9 4.3接收交流特性9 4.4接收机灵敏度特性10 4.5参考时钟交流特性10 4.6发射交流特性10 4.7温度和电压监测特性10 4.8天线性能114.9极限值115.1关于设备板的布线提示125.2应用电路图126.1模块图纸14 6.2模块推荐封装14 6.3模块焊接曲线15DWM1000简介DWM1000模块遵循802.15.4-2011协议。
该无线通讯模块包括Qorvo的DW1000 UWB收发芯片,及该模块上的其他组件构成。
DWM1000可以降低开发成本,提高开发效率,降低了UWB通讯及定位测距的复杂性,大大促进了基于该技术的设计开发。
1.1DWM1000功能描述DWM1000板上的DW1000芯片,是基于CMOS的、低功耗的的无线收发集成电路,遵循802.15.4-2011[1]协议中的UWB标准的芯片。
DWM1000并不需要用户去设计电路,因为模块上包含了天线、无线通讯模块及相关的电路。
该模块包括了一个板上38.4MHZ的参考晶振,通过把该晶振嵌入到产品中,可以把初始化频率误差降到大约百万分之二,具体如何使用DW1000的片上晶振,见章节2.1.1。
AON存储能用来保存当模块处于低功耗操作模式时DWM1000的配置数据,此时芯片没有被供电。
这些数据可以被自动地上传和下载,并且DWM1000中的AON存储是可配置的。
uwb 模块 测距 参数
uwb 模块测距参数UWB模块测距参数UWB(Ultra-Wideband)技术是一种宽带、低功耗的无线通信技术,可以实现高精度的室内定位和测距。
UWB模块是一种基于UWB技术的硬件设备,用于测量物体之间的距离。
在本文中,我们将重点介绍UWB模块测距的参数及其相关内容。
一、测距原理UWB模块的测距原理基于时域反射测距技术,通过发送一系列非常短的脉冲信号,并测量这些脉冲信号的传播时间来计算距离。
具体来说,UWB模块发送一个特定的脉冲信号,当这个信号被目标物体反射后,UWB模块接收到反射信号。
通过测量脉冲信号从发送到接收的时间差,可以计算出目标物体与UWB模块之间的距离。
二、测距参数在使用UWB模块进行测距时,有几个重要的参数需要考虑:1. 发送功率(Tx Power):发送功率是UWB模块发送信号的强度。
较高的发送功率可以提高信号的传播距离,但也会增加功耗和干扰。
因此,需要根据具体应用场景来选择适当的发送功率。
2. 带宽(Bandwidth):带宽是指UWB模块发送的脉冲信号的频带宽度。
较宽的带宽可以提供更高的测距分辨率和精度,但也会增加信号的复杂性和功耗。
3. 脉冲宽度(Pulse Width):脉冲宽度是指UWB模块发送的脉冲信号的持续时间。
较短的脉冲宽度可以提供更高的测距精度和分辨率,但也会增加信号的复杂性和功耗。
4. 接收灵敏度(Receiver Sensitivity):接收灵敏度是指UWB模块接收信号的灵敏度。
较高的接收灵敏度可以提高信号的接收距离和抗干扰能力,但也会增加功耗。
需要根据具体应用场景来选择适当的接收灵敏度。
5. 多径干扰(Multipath Interference):多径干扰是指脉冲信号在传播过程中受到反射、散射等因素的影响,导致信号到达时间和强度出现变化,从而影响测距精度。
为了减少多径干扰,可以采用信号处理算法、天线设计等方法。
三、测距误差及解决方法在实际应用中,UWB模块的测距精度会受到多种因素的影响,从而引起测距误差。
研创物联 DWM3220 系列 UWB 模组用户手册说明书

DWM3220 UWB 无线射频模块用户使用手册V1.0产品概述DWM3220模块是基于研创物联自研的Y3 UWB SIP IC 设计的超宽带 UWB 收发器模块。
其封装完全兼容DWM1000与DWM3000。
该模块集成了包括所有的射频电路、电源管理和时钟电路及天线接口。
这款模块可用在TWR 、TDOA 、PDOA 定位系统中,用来定位目标,其精度能小于10cm ;并且该模块支持高达6.8Mbps 的数据传输率。
DWM3000的设计符合FiRa PHY 和MAC 规范,能够与其他FiRa™兼容设备实现互操作性。
主要优势• 在实时定位系统中用于物体的定位,精度误差小于10厘米;• DWM3220-IPEX 支持双天线PDOA 功能; • 抗多径衰落能力强;• 在UWB RTLS (实时定位系统)中支持高密度的标签分布;• 封装接口兼容原厂DWM1000与DWM3000主要特征• 符合 IEEE 802.15.4-2015 和 IEEE 802.15.4zBPRF 标准;• 完全符合FiRa™ PHY、MAC 和认证开发; • 支持 UWB 通道 5 (6.5 GHz ) 和 9 (8GHz );• 发射端输出功率编程可控;• 完全相干接收机,最大化使用距离,精确度高;• 其设计遵守FCC&ETSI UWB 的频谱标准; • 供电为2.8V~3.6V ;• 数据传输率为850kbps ,6.8Mbps ; • 最大数据包长度为1023字节,满足高数据量交换的应用需求; • 集成MAC 支持功能; • 主机接口为SPI ;模组框图G P I O 6G P I O 5G P I O 4G P I O 3G P I O 2G P I O 1G P I O 0V S S应用领域• 使用TWR 或TDOA 定位高精度实时定位系统(RTLS ),满足不同的市场需求; • 位置感知的无线传感器网络(WSNs )目录1概述 (5)1.1DWM3220功能描述 (5)1.2DWM3220供电启动 (5)1.3SPI主机接口 (6)1.4通用输入输出口(GPIO) (8)1.5AON存储器 (9)1.6一次性可编程存储器(OTP) (9)1.7中断及设备状态 (9)1.8校验及检测 (9)2DWM3220模块校准 (10)2.1DWM3220校准 (10)2.2发射校准 (10)2.3天线延迟校准 (10)3DWM3220引脚连接 (11)3.1引脚定义 (11)3.2引脚描述 (11)4电气规格 (14)4.1额定工作条件 (14)4.2直流特性 (14)4.3接收交流特性 (15)4.4参考时钟交流特性 (15)4.5传输机交流特性 (15)4.6绝对最大额定值 (16)5应用注意要点 (17)5.1DWM3220外围电路设计 (17)5.2DWM3220布线提示 (19)6封装信息 (20)6.1模块尺寸与封装 (20)6.2模块焊接曲线 (21)7订购信息 (22)8词汇表 (23)9附录 (25)9.1ISO9001认证文件 (25)10文档管理信息表 (26)1概述1.1DWM3220功能描述DWM3220模块遵循IEEE 802.15.4-2011 和 IEEE 802.15.4z(BPRF 模式)协议。
研创物联 UWB Mini5 使用手册说明书

YCHIOT UWB开发板Mini5User GuideVersion 1.0Content1研创物联定位开发套件简介 (4)1.1UWB Mini 5系列模块介绍 (4)1.2专业术语表 (6)2研创UWB实际项目应用情况 (8)2.1UWB Mini5能用在哪些场合? (8)2.2国内外主流室内定位技术的优缺点? (8)3常见技术问题问答 (9)3.1原理 (9)3.2使用 (9)3.3开发 (10)4UWB MINI5定位套件测试说明 (11)4.1基站AT指令功能配置与设置 (11)4.23基站+1标签测试(玩法1——室内定位) (12)4.31基站+3标签测试(玩法2——超范围报警) (14)5UWB MINI5模块二次开发 (16)5.1Mini5固件更新 (16)5.2Mini5使能串口输出数据的方法 (16)5.3基站输出数据入网解决方案 (17)6PC上位机通讯数据格式与二次开发 (19)6.1RTLS上位机简介 (19)6.2RTLS上位机界面 (19)6.3TOF Report Message (22)6.4Log Files (23)6.5Trilateration三边测量法的原理与计算方法 (23)7UWB产品化开发 (25)7.1数据标定方法 (25)7.2遮挡对室内定位UWB的影响 (26)8文档管理信息表 (27)1 研创物联定位开发套件简介1.1 UWB Mini 5系列模块介绍UWB Mini 5系列概述UWB Mini5模块采用STM32G070RBT6单片机为主控芯片。
外围电路包括:DWM1000模块、电源模块、LED 指示模块、复位电路等。
3.5c m2.4cmDW MODULE 10 FEB 2014REV 1.1ARMSTM32F103RCT6DW1000RUPF-G0001A DW 69102A 004U W B 67U W B M i n iG N D G N D S C K U 4R S D O U 4T V C 5 V C 5图1.3.1.1 UWB Mini5正面图图1.3.1.2 UWB Mini5背面图DW MODULE 10 FEB 2014REV 1.1ARMSTM32F105RCT6单片机控制灯TPS73601DBVR 超低纹波LDODW1000-RX LED 指示灯 DW1000-TX LED 指示灯USART1串口输出引脚 SWD STLINK 下载调试接口UWB Mini 5硬件参数表1.3.2 UWB Mini5硬件参数基本参数无线参数PCB工艺4层板-环氧树脂通讯速率110 kbit/s, 850 kbit/s, 6.8 Mbit/s供电接口micro-USB(5.0V) / 接线柱工作频率 3.5 GHz ~ 6.5 GHz (见1.3.2节)通讯接口micro-USB(5.0V) / 串口(3.3V TTL)工作频道 6 (见1.3.2节)下载接口SWD (VCC SDIO SCKGND)发射功率-35dbm/MHZ ~ -62dbm/MHZ可程控主控制器STM32F103RCT6(64pin) 最大包长1023字节外部晶振8Mhz 通讯距离Mini5-CA为30m,Mini5-SMA为80米PCB尺寸35mm * 24mm 数据抖动典型±10cm,一般遮挡±30cm UWB Mini 5 支持频段UWB发射功率比WIFI小,应该没有人身伤害。
超宽带(UWB)测距(TWR)原理

超宽带(UWB)测距(TWR)原理1UWB超宽带概念UWB是一种无线载波通信技术,利用纳秒级的非正弦波窄脉冲传输数据,工作频段在GHZ~6.75GHZ,频宽典型值为500MHZ或者1GHZ,所以可以获取亚纳米的精确时间(1ns约等于30cm)。
UWB信号的时域波形如图1-1所示。
不同于传统的无线射频信号有固定频率的载波(如蓝牙2.4G),UWB在不发送数据时是完全静态的,要发送数据时才发送宽度很窄(如1ns)的脉冲信号。
该窄脉冲在频域上很宽,所以叫超宽带。
因为UWB时域信号脉冲较窄,所以在时间、空间上有较大分辨力,比较容易抵抗室内信号传输常见的多径效应(信号因为反射造成的多路径传播)的影响,因此测距和定位精度较高。
图 1‐1 超宽带时域和幅关系图 1‐2 超宽带频域和功率关系2UWB测距原理UWB测距主要采用双向测距(Two-way Ranging)方法,以下所有的方法都包括两个节点:设备A和设备B,默认设备A是测距的发起者,设备B是响应者;双向测距主要分为以下两种方法:1.单边双向测距(Single-sided Two-way Ranging)2.双边双向测距(Double-sided Two-way Ranging)3.使用4消息方式(4 messages)4.使用3消息方式(3 messages)3单边双向测距(Single-sided Two-way Ranging)单边双向测距(Single-sided Two-way Ranging),单侧双向测距(SS-TWR)是对单个往返消息时间上的简单测量,设备A主动发送数据到设备B,设备B返回数据响应设备A。
图 2‐2 单边双向测距测距流程:设备A(Device A)主动发送(TX)数据,同时记录发送时间戳,设备B(Device B)接收到之后记录接收时间戳;延时Treply之后,设备B发送数据,同时记录发送时间戳,设备A接收数据,同时记录接收时间戳。
联合UWB和IMU的矿井内实体定位及语义地图构建系统

联合UWB和IMU的矿井内实体定位及语义地图构建系统作者:郑桂锋徐浩恺胡雄杰韦焯淇来源:《电脑知识与技术》2021年第05期摘要:煤矿开采包括地面开采和地下开采两种方式,在全世界,地下开采方式占60%,矿井作业依然普遍。
为保证矿井下作业人员的安全,需要实时掌握井下人员的位置情况,传统的GPS在矿井环境下由于信号衰减太大已经不再适用。
为解决矿井环境下人员的稳定定位、安全保障问题,本文提出了一种联合UWB和IMU器件的矿井内实体定位及语义地图构建系统,介绍了系统总体构成、系统实现的功能和系统各部分的原理及技术实现方法。
该系统可以实现矿井下人员的稳定定位,具备一键SOS功能、物理实体的语义地图构建功能,在平时,井下作业人员基于所构建的语义地图可以更高效地工作;在发生危险时,能让相关人员及时地获取到遇险人员的位置信息。
关键词:矿井定位;UWB;IMU;语义地图1 引言随着无线传感网络和无线通信知识的逐步完善,各类定位系统得到了快速发展。
目前,GPS卫星定位能够满足人们大部分户外定位的需求,但是矿井环境错杂,电磁波传输损耗严重,并不能实现精确有效的定位,并且矿井一旦发生安全事故,矿井内人员的位置信息就十分重要,这一点是卫星定位所不能完成的。
目前,矿井内部大多采用射频识别以及无线网络来实现对人员的监测以及定位,但是大多存在信号损耗严重,可检测距离短,精度不高等问题,并非真正意义上的高精度定位系统,这将会导致发生事故时不能精确得到人员的位置信息。
因此,本文章提出了一种基于UWB和IMU的矿井内实体定位及语义地图构建系统。
超宽带(UWB)定位系统是一套基于架设基站的独立的定位系统,不依赖于GPS,可独立实现精准的室内定位,结合UWB技术的优势,利用UWB构建一套针对矿井环境的系统,可以很好地解决矿井环境下人员的稳定定位、安全保障问题[3]。
IMU惯性测量单元则装在用户端,通过监测用户姿态信息来对UWB系统进行定位补偿,然后通过语义地图来实现对矿井下用户的实时监测,不仅能够实现对用户的稳定定位,同时也大大提高了定位精度。
基于uwb技术的twtof测距跟踪架构
基于uwb技术的twtof测距跟踪架构跟踪与导航P400测距和通讯模块既支持跟踪系统,也支持导航系统。
P400测距和通讯模块是点对点的精确测距设备。
在构建定位和导航同时工作的系统时,常常需要通过另外的无线电系统把位置信息从移动设备发送给控制中心或者把控制中心所知道的移动点的位置信息发送给移动设备,P400测距和通讯模块是一个带有综合数据通信能力的射频系统,因此本征上支持这些跟踪/导航综合系统。
参照和移动节点典型的跟踪系统包含有“移动”和“参照”设备或者节点。
参照节点的(x,y,z)坐标对于定位系统来说是已知的,移动节点相对于参照点的位置是计算出来的。
当参照节点处于已知和静态的位置时,他们通常被叫做“锚”。
P400测距和通讯模块本身并不是一个跟踪系统,也不是一个导航系统。
但是作为一个点对点集成有无线通讯能力(无线通信是用来协调测距交通和传播的参照点位置数据)的射频测距设备,它为各种不同定位架构的系统提供了最大的灵活性。
测距和通讯模块用来测量以下节点之间的距离:1. 移动点和移动点(用于传播参照或者协调相对行为,例如编队和跟随)2. 移动点和参照点(用于精确定位或漂移校正)3. 参照点和参照点(用于在设置特设“锚”,也就是参照点时达到额外的高精确度)4. 移动的参照点和移动的目标(用于自动车辆安全和态势感知)参照节点处于静止状态时较易理解,实际上任何一个具有准确瞬间动态位置的节点都可以用来作为参考节点。
例如,GPS卫星就可以作为参照点,但是他们不是静态的。
卫星的位置不断被动态更新并且通过无线方式传送给移动的GPS接收器,GPS接收器根据收到的GPS “锚”之间的位置和延时来进行定位。
同样,在一个由测距和通讯模块RCM辅助的定位系统中,任何具有瞬时精确位置的节点都可以作为一个相对于具有不太精确的已知位置的邻居节点的参照点。
这种“传播参照点”技术可以扩展跟踪系统的监控范围,但是以传播位置误差为代价。
一般来说,系统需要周期性地通过访问一个知道准确位置的临时静态节点来限制传播误差。
UWB定位系统介绍

14
Ubisense 定位引擎
15
© Ubisense
Ubisense 定位平台
16
© Ubisense
• Ubisense 与超宽频
– Ubisense使用的频率范围约7.2千兆赫,左右波动为1.75千兆赫 ( Ubisense名下的7000系列) – 功率约 1毫瓦( 约为一部移动电话的1 / 100) – 不会干扰未来的超宽带通信应用
5
© Ubisense
超宽带提供的独特的优势
医疗保健
实时跟踪病人,进行照顾 和管理 - 病情分析与治疗改进 - 人力资源管理
4
© Ubisense
超宽频(UWB)
• 频率
• 一般频率使用情况
– 在美国内部允许使用的超宽带的频率范围一般是从3至10千兆赫(最 大为41.3 dBm/MHz) – 在欧盟内部允许使用的超宽带的频率范围一般是从6到8.5千兆赫(最 大41.3 dBm/MHz) -欧洲电信标准协会标准EN 302 500定位跟踪 – 在亚洲/太平洋地区一些国家,如韩国、日本、新加坡则使用国际通 用的超宽带标准 – 其他地区到目前为止还没有规定这一标准
Ubisense RTLS
总体介绍
© 2007 Ubisense
Ubisense – 精 确 实 时 定 位
• 公司介绍
– 成立于2003年1月 – 来自剑桥大学的工程师队伍
• 专业通信工程实验室 • 10年的位置搜索经验
– 专业的管理团队,建立成功的定位系统有着 丰富的经验 – 总部设在英国,在美国、德国和新加坡设有 办事处 – 全球员工超过90名
• 动态控制的标签
– Ubisense标签,可以设定产生的超宽带脉冲的频率,最高10Hz
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
APH001-UWB模块TWR双边测距协议文档更新时间:2018-06-1定位帧基本结构•该定位帧遵循IEEE 802.15.4协议。
IEEE 802.15.4描述了低速率无线个人局域网的物理层和媒体接入控制协议。
它属于IEEE 802.15工作组。
IEEE 802.15.4是ZigBee, WirelessHART, MiWi, Thread规范的基础。
•IEEE 802.15.4 MAC层帧结构的设计是以用最低复杂度实现在多噪声无线信道环境下的可靠数据传输为目标的。
每个MAC 子层的帧都包含帧头、负载和帧尾三部分。
帧头部分由帧控制信息、帧序列号和地址信息组成。
MAC子层的负载部分长度可变,负载的具体内容由帧类型决定。
帧尾部分是帧头和负载数据的16位CRC(FCS)校验序列。
•在MAC子层中设备地址有两种格式:16位(两个字节)的短地址和64位(8个字节)的扩展地址。
16位短地址是设备与个域网协调器关联时,由协调器分配的个域网内局部地址;64位扩展地址则是全球唯一地址,在设备进入网络之前就分配好了。
16位短地址只能保证在个域网内部是唯一的,所以在使用16位短地址通信时需要结合16位的个域网网络标识符才有意义。
两种地址类型地址信息的长度是不同的,所以MAC帧头的长度也是可变的。
一个数据帧使用哪种地址类型由帧控制字段标识。
表1 信标帧格式2字节1字节2字节2字节2字节可变字节2字节Frame Control (FC)SequenceNumberPAN IDDestinationAddressSourceAddressRangingMessageFCS MHR帧头MAC负载MFR帧尾Frame ControlFrame Control (FC)Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Bit 8Bit 9Bit10Bit11Bit12Bit13Bit14Bit15 1000001000DestAddrMode00SrcAddrMode Data Frame SEC PEND ACK0101 Sequence Number序列号,会自增。
PAN IDPAN ID是个域网地址。
出现一般是伴随在确定信道以后的。
PAN ID其全称是Personal Area Network ID,意即网络的ID(即网络标识符)。
固定值,设置为0xDECA。
Destination Address对方地址的ID,关于地址,目前是由拨码开关所决定的,虽然Mini3开发板地址由3bit拨码开关决定,Mini3s / Mini3sPlus地址由AT命令设置。
通过以上方式设置地址的数量是有限制的,通过修改STM32源码可设置65535个不同的地址。
Source Address本机地址。
Ranging MessageRanging Message有以下三种类型,在程序的不同阶段请对号入座。
详细说明见第2章。
FCSFrame Check Sequence(简称FCS),利用一定的校验方法,校验整个帧的数据。
校验方法例如:如CRC校验、XOR校验、LRC 校验等。
这里的FCS是在操作一定寄存器下,由DW1000自动计算的。
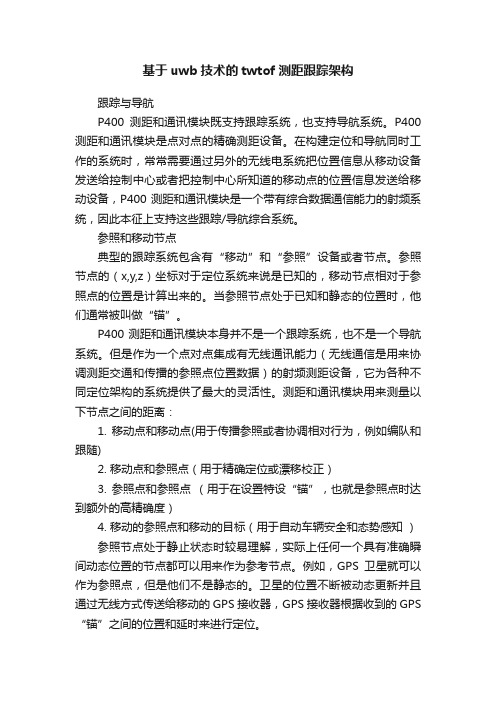
Ranging MessagePoll Message1字节1字节FunctionCodeRangenumber0x81-这个是由Tag发起的一个Poll message。
Response Message1字节2字节4字节1字节FunctionCodeSleepCorrectionToF (n-1)Rangenumber0x70---这个是由基站给标签发的,这里的ToF是上一个阶段的飞行时间。
1字节1字节5字节5字节5字节5字节5字节5字节1字节FunctionCodeRangenumberPoll TXtimeA0 Resp RXtimeA1 Resp RXtimeA2 Resp RXtimeA3 Resp RXtimeFinal TXtimeValidResp 0x82--------收发应答过程Mini3标签Mini3sPlus基站TOF 数学计算1. // poll response round trip delay time is calculated as2. // (anchorRespRxTime - tagPollTxTime) - (anchorRespTxTime - tagPollRxTime)3. Ra = (int64)((anchorRespRxTime - tagPollTxTime) & MASK_40BIT);4. Db = (int64)((inst->txu.anchorRespTxTime - inst->tagPollRxTime) & MASK_40BIT);5.6. // response final round trip delay time is calculated as7. // (tagFinalRxTime - anchorRespTxTime) - (tagFinalTxTime - anchorRespRxTime) 8. Rb = (int64)((tagFinalRxTime - inst->txu.anchorRespTxTime) & MASK_40BIT); 9. Da = (int64)((tagFinalTxTime - anchorRespRxTime) & MASK_40BIT); 10.11. RaRbxDaDb = (((double )Ra))*(((double )Rb)) - (((double )Da))*(((double )Db)); 12.13. RbyDb = ((double )Rb + (double )Db); 14. RayDa = ((double )Ra + (double )Da); 15.16. tof = (int32) ( RaRbxDaDb /(RbyDb + RayDa) );bb a a ba b a fabD R D R D D R R T ˆˆˆˆˆˆˆˆˆ+++−=三边定位算法有购买上位机源代码的客户,可在源文件中提取三边定位算法,使用GetLocation 函数进行坐标计算,调用十分简单。
经验证,该函数在普通嵌入式单片机上亦运行良好。
其完整函数为:1. int GetLocation(vec3d *best_solution, int use4thAnchor, vec3d* anchorArray, int *distanceArray)2. {3. /* processing */4. }4个参数,*best_solution 指向的是最终坐标的地址,vec3d 是一个结构体。
第二个参数,如果使用3个基站进行定位,use4thAnchor 等于0,如果使用4个基站进行定位,use4thAnchor 等于1。
anchorArray 需要传入的是基站的坐标位置。
*distanceArray 是基站到标签的距离。
Device ADevice BTXT f T fRXRXTX D bR atimeRXTXD aR bT fRMARKERP1P1P2P3P2P3使用例子如下所示:1.int main()2.{3.int result = 0;4. vec3d anchorArray[4];5. vec3d report;6.int Range_deca[4];7. anchorArray[0].x = 0.000; //anchor0.x uint:m8. anchorArray[0].y = 0.000; //anchor0.y uint:m9. anchorArray[0].z = 2.000; //anchor0.z uint:m10.11. anchorArray[1].x = -6.80; //anchor1.x uint:m12. anchorArray[1].y = 0.000; //anchor1.y uint:m13. anchorArray[1].z = 2.000; //anchor1.z uint:m14.15. anchorArray[2].x = 0.000; //anchor2.x uint:m16. anchorArray[2].y = -10.8; //anchor2.y uint:m17. anchorArray[2].z = 2.000; //anchor2.z uint:m18.19. anchorArray[3].x = 0.000; //anchor3.x uint:m20. anchorArray[3].y = -5.80; //anchor3.y uint:m21. anchorArray[3].z = 2.000; //anchor3.z uint:m22.23. Range_deca[0] = 5784; //tag to A0 distance24. Range_deca[1] = 7021; //tag to A1 distance25. Range_deca[2] = 5995; //tag to A2 distance26. Range_deca[3] = 2000; //tag to A3 distance27.28. result = GetLocation(&report, 0, &anchorArray[0], &Range_deca[0]);29.30. printf("result = %d\r\n",result);31. printf("tag.x=%.3f\r\ntag.y=%.3f\r\ntag.z=%.3f\r\n",report.x,report.y,report.z);32.return 0;33.}所计算的结果,保存在report.x,report.y,report.z中,并通过printf函数打印出来。
参考文献[1] DecaRangeRTLS_ARM_Source_Code_Guide, Decawave[2] Indoor Positioning using Ultra-wideband Technology, Marcus Utter[3] IEEE P802.15 Working Group for Wireless Personal Area Networks (WPANs)。