多边形区域填充算法
c语言多边形区域填充算法
c语言多边形区域填充算法C语言多边形区域填充算法一、介绍多边形区域填充算法是计算机图形学中的一项重要技术,用于将给定的多边形区域进行填充,使其呈现出丰富的颜色或纹理,增强图形的效果和表现力。
本文将介绍一种常用的C语言多边形区域填充算法——扫描线填充算法。
二、扫描线填充算法原理扫描线填充算法是一种基于扫描线的填充方法,其基本思想是将多边形区域按照水平扫描线的顺序,从上到下逐行扫描,通过判断扫描线与多边形边界的交点个数来确定是否进入多边形区域。
具体步骤如下:1. 首先,确定多边形的边界,将其存储为一个边表。
边表中的每个边都包含起点和终点的坐标。
2. 创建一个活性边表(AET),用于存储当前扫描线与多边形边界的交点。
初始时,AET为空。
3. 从上到下逐行扫描多边形区域,对每一条扫描线,从边表中找出与该扫描线相交的边,并将其加入AET中。
4. 对于AET中的每一对交点,按照从左到右的顺序两两配对,形成水平线段,将其填充为指定的颜色或纹理。
5. 在扫描线的下一行,更新AET中的交点的坐标,然后重复步骤4,直到扫描到多边形区域的底部。
三、代码实现下面是一个简单的C语言实现扫描线填充算法的示例代码:```#include <stdio.h>#include <stdlib.h>#include <stdbool.h>typedef struct {int x;int y;} Point;typedef struct {int yMax;float x;float dx;int next;} Edge;void fillPolygon(int n, Point* points, int color) {// 获取多边形的边界int yMin = points[0].y;int yMax = points[0].y;for (int i = 1; i < n; i++) {if (points[i].y < yMin) {yMin = points[i].y;}if (points[i].y > yMax) {yMax = points[i].y;}}// 创建边表Edge* edges = (Edge*)malloc(sizeof(Edge) * n);int k = n - 1;for (int i = 0; i < n; i++) {if (points[i].y < points[k].y) {edges[i].yMax = points[k].y;edges[i].x = points[i].x;edges[i].dx = (float)(points[k].x - points[i].x) / (points[k].y - points[i].y);edges[i].next = k;} else {edges[i].yMax = points[i].y;edges[i].x = points[k].x;edges[i].dx = (float)(points[i].x - points[k].x) / (points[i].y - points[k].y);edges[i].next = i;}k = i;}// 扫描线填充for (int y = yMin; y < yMax; y++) {int xMin = INT_MAX;int xMax = INT_MIN;for (int i = 0; i < n; i++) {if (y >= edges[i].yMax) {continue;}edges[i].x += edges[i].dx;if (edges[i].x < xMin) {xMin = edges[i].x;}if (edges[i].x > xMax) {xMax = edges[i].x;}int j = edges[i].next;while (j != i) {edges[j].x += edges[j].dx; if (edges[j].x < xMin) {xMin = edges[j].x;}if (edges[j].x > xMax) {xMax = edges[j].x;}j = edges[j].next;}}for (int x = xMin; x < xMax; x++) { drawPixel(x, y, color);}}free(edges);}int main() {// 定义多边形的顶点坐标Point points[] = {{100, 100},{200, 200},{300, 150},{250, 100}};// 填充多边形区域为红色fillPolygon(4, points, RED);return 0;}```四、总结通过扫描线填充算法,我们可以实现对多边形区域的填充,从而提升图形的表现效果。
计算机图形学--填充

扫描线多边形填充算法扫描线多边形区域填充算法是按照扫描线顺序,计算扫描线与多边形的相交区间,再用要求的颜色显示这些去区间的像素(即完成填充)。
填充过程:1 求交:计算扫面线与多边形个边的交点。
2 排序: 把所有交点按x值地震顺序排序。
2 配对:两两配对,1,和2,3和4 等等。
每对交点代表扫面线与多边形的一个相交区间。
4 填充:把相交区间内的像素设置成多边形颜色。
相交顶点的数目确定:检查相交顶点的两条边的另外两个定点的y值。
按这两个y值中大于交点y值得个数是0,1,2来决定是取0,1或2个。
边界像素取舍:对扫描线与多边形的相交区间取左闭右开。
水平边界处理:水平边不参与求交计算,跳过。
相交:把多边形的所有边放在一个表中,处理每条扫描线是,按顺序从表中取出所有边,分别与扫面线求交。
改进:效率低,可只求与它相交的多边形的边进行求交运算。
算法思想及实现:活性边:与当前扫描线相交的边。
活性边表:把活性边按与扫描线线交点x坐标递增的顺序存放在一个链表中。
活性边的每个节点的内容:X ,X的变化量,Y的最大值,一个指针。
1 存放当前扫描线与边的交点坐标x值。
2 存放从当前扫描线到下一条扫描线间x的增量3 存放该边所交的最高扫面线号ymax;4 存放指向下一条边的指针。
算法的主要步骤:建立NET(new edge list)从最低扫面线开始到最高扫面线循环。
建立或调整AET(active edge list)按照AET总的接点顺序填充。
算法描述:算法描述:void polyfill (多边形polygon, 颜色color){for (各条扫描线i ){ 初始化新边表头指针NET [i];把ymin = i 的边放进边表NET [i];}y = 最低扫描线号;初始化活性边表AET为空;for (各条扫描线i ){ 把新边表NET[i]中的边结点用插入排序法插入AET表,使之按x坐标递增顺序排列;遍历AET表,把配对交点区间(左闭右开)上的象素(x,y),用drawpixel (x, y, color) 改写象素颜色值;遍历AET表,把y max= i +1的结点从AET表中删除,并把y max > i+1结点的x值递增D x;若允许多边形的边自相交,则用冒泡排序法对AET表重新排序;}} /* polyfill */。
计算机图形学---多边形填充算法课件
使用更有效的数据结构
使用更有效的数据结构可以减少算法在内存中的访问次数,从而提高算法的性能。例如,可以使用边 界盒(bounding box)来加速多边形的遍历。
还可以使用索引数据结构来加速多边形的遍历,例如使用四叉树(quadtree)或八叉树(octree)。
并行化填充算法以提高性能
并行化填充算法可以将计算任务分配 给多个处理器核心,从而提高算法的 性能。例如,可以使用多线程技术来 并行化填充算法。
CHAPTER 04
填充算法的应用
在游戏开发中的应用
角色和场景渲染
多边形填充算法用于在游戏中创 建逼真的角色和场景,通过填充 多边形来模拟物体的形状和纹理
。
碰撞检测
游戏中的物体需要进行碰撞检测 ,以确保游戏的真实性和玩家的 交互体验。多边形填充算法可以 用于检测多边形之间的重叠,从
而实现碰撞检测。
地表现自然和人造物体的细节,从而丰富图形表现形式。
拓展应用领域
03
随着多边形填充算法的发展,计算机图形学将在虚拟现实、增
强现实、游戏设计、影视制作等领域得到更广泛的应用。
区域增长填充算法
区域增长填充算法是一种基于区域的填 充算法,通过将多边形内部的像素连接 起来形成一个区域,然后对该区域进行
填充。
该算法首先确定多边形的所有像素,然 后从多边形内部的一个像素开始,将其 相邻的像素加入到区域中,直到整个多
边形内部都被填充。
区域增长填充算法的优点是能够处理复 杂的填充需求,如填充不规则形状或多
种子填充算法
种子填充算法是一种基于种子点的填充算法,通过从指定的种子点开始,向周围 扩散填充颜色来实现填充。
该算法适用于任意形状的多边形,具有灵活、易于实现的特点,但可能会在处理 大型多边形时效率较低。
多边形填充算法
多边形填充算法
多边形填充算法是一种计算机图形学中的算法,用于将一个封闭的多边形区域(如矩形、三角形、梯形等)填充成指定的颜色。
在计算机图形学中,多边形是由一系列线段(边)连接成的封闭区域。
填充算法的目的是在多边形的内部填充指定的颜色。
这种算法通常用于计算机辅助设计、计算机游戏开发、计算机动画、计算机视觉等领域。
填充算法有多种实现方法,包括扫描线填充、种子填充、边界填充、区域分割等。
其中,扫描线填充是最常见的一种算法,它的基本思想是从多边形的最上面一行开始,逐行向下扫描,同时记录扫描线和多边形之间的交点。
当扫描线与多边形的边相交时,根据交点的奇偶性来判断该点是否在多边形内部。
如果是奇数个交点,则该点在多边形内部,需要进行填充;如果是偶数个交点,则该点在多边形外部,不需要填充。
种子填充是另一种常见的填充算法,它的基本思想是从多边形内部的一个点(种子)开始,向外扩散填充。
在扩散过程中,同时记录已经填充过的像素点,避免重复填充。
这种算法的优点是填充速度较快,但容易出现填充区域不封闭、填充效果不理想等问题。
边界填充和区域分割是另外两种填充算法,它们的实现方式比较复杂,但可以处
理比较复杂的填充情况,例如多个子多边形共同填充、奇异多边形填充等。
总的来说,多边形填充算法在计算机图形学中具有重要的应用价值和研究意义,不同的填充算法各有优缺点,需要根据具体的需求和应用场景来选择合适的算法。
多边形的区域填充
b++;
p[b]=(int)edge[j].xmax;
}
}
if((scan>edge[j].ymin)&&(scan<edge[j].ymax))
{
b++;
p[b]=(int)(edge[j].xmax+edge[j].dx*(scan-edge[j].ymax));
}
}
//pDC->LineTo(spt[edge[0].num].x,spt[edge[0].num].y);
4.用C/C++语言编写源程序并调试、执行(最好能用动画显示填充过程);
5.分析实验结果
6.对程序设计过程中出现的问题进行分析与总结;
7.打印源程序或把源程序以文件的形式提交;
8.按格式要求完成实验报告。
五、实验结果及分析
种子填充算法的优点是非常简单,缺点是需要大量栈空间来存储相邻的点。扫描线填充算法就是它的改进的方法。它是通过沿扫描线填充水平像素段,来处理四连通或八连通相邻点,这样就仅仅只需要将每个水平像素段的起始位置压入栈,而不需要将当前位置周围尚未处理的相邻像素都压入栈,从而可以节省大量的栈空间。
if(spt[i].y > pmax)
pmax = spt[i].y;
if(spt[i+1].y < pmin)
pmin = spt[i+1].y;
}
}
for(int r=1;r<=6;r++)//排序edge(yUpper,xIntersect),结果为从大到小
{
for(int q=0;q<=6-r;q++)
计算机图形学第3讲多边形区域填充算法
40
种子填充算法
栈实现的种子填充算法(四向算法)
void BoundaryFill4(int x, int y, int boundColor, int newColor) { int px = x, py = y; stackPush(px, py); while(!stackEmpty()) { stackPop(&px, &py); SetPixel(x, y, newColor);
扫描转换算法
区域填充算法
34
种子填充算法
区域:点阵表示的图形,像素集合 表示方法
内点表示 区域内的所有像素具有同一颜色,而区域外的所有像素具有另 一种颜色 边界表示 区域边界上的所有像素具有特定的颜色(可以是填充色),在 区域内的所有像素均不能具有这一特定颜色,而且边界外的像 素也不能具有与边界相同的颜色
若低端点y值为ymin,则该边就放在ymin所对应的桶中
桶中的各边:
按下端点的x坐标值排序
27
12 10(2,9) l3 8 6 4 2 l2 l4
(13,11) l5 (13,5) l6
(7,7)
(2,3) (7,1) l1 2 4
9 11 9 3 ∧ ∧
6
8 10 12 14
7 3/2 11
扫描线算法
取整问题
扫描线与多边形边界交点坐标值不为整数 当扫描线与多边形边界交点坐标为小数值时,如果多 边形在此边界右侧,则将该小数值进1作为边界点,否 则舍去小数部分并进行填充,这样可使多边形不扩大
解决方法
16
扫描线算法
水平边问题
多边形填充算法本
多边形填充算法本在计算机图形学中,使用多边形填充算法可以实现各种图形的绘制,例如:圆形、椭圆形、字母等。
对于任意形状的多边形来说,其内部像素点的坐标是无法直接计算得到的,因此需要通过一定的算法来实现。
常见的多边形填充算法有扫描线填充算法和边界填充算法。
接下来我们来详细了解这两种算法。
扫描线填充算法是通过扫描多边形上的每一条水平线,找到与多边形相交的线段,并进行填充操作。
具体步骤如下:1.找到多边形的最高点和最低点,作为扫描线的起点和终点。
2.将扫描线从起点依次向下移动,直到到达终点。
3.在每一条扫描线上,找到与多边形相交的线段。
4.根据线段的起点和终点,计算交点的x坐标,并从起点到终点对应的像素点进行填充。
5.重复步骤4,直到所有的扫描线都处理完毕。
扫描线填充算法的优点是简单易懂,适用于一般情况。
但是对于复杂的多边形来说,会存在边界交叉的情况,需要特殊处理。
边界填充算法是通过检测多边形的边界点,并进行填充操作。
具体步骤如下:1.找到多边形的最左边、最右边、最上边和最下边的点,作为边界点。
2.从最上边的点开始,依次向下遍历每一行像素点。
3.在每一行中,寻找与多边形边界相交的点,并进行填充操作。
4.重复步骤3,直到到达最下边的点。
边界填充算法的优点是对具有复杂交叉边界的多边形也能进行正确的填充操作。
但是对于非凸多边形来说,边界填充算法可能会有空隙出现。
除了以上两种常见的多边形填充算法,还有其他一些算法也可以实现多边形的填充操作,例如:扫描转换填充算法、边界边框填充算法等。
在实际应用中,多边形填充算法通常结合图形处理库或者计算机图形学软件来实现。
这些软件提供了丰富的函数和方法,可以直接调用进行多边形的填充操作。
综上所述,多边形填充算法是计算机图形学中的一个重要算法。
通过扫描线填充算法或者边界填充算法,可以实现对任意形状多边形的填充操作。
随着计算机图形学的发展,多边形填充算法也不断进化和优化,以满足不同应用场景的需求。
多边形的扫描转换算法、区域填充算法

贵州大学计算机图形学实验报告学院:计算机科学与信息学院专业:软件工程班级:反映)根据扫描线的连贯性可知:一条扫描线与多边形的交点中,入点和出点之间所有点都是多边形的内部点。
所以,对所有的扫描线填充入点到出点之间的点就可填充多边形。
如何具体实现(如何找到入点、出点)?根据区域的连贯性,分为3个步骤:(1)求出扫描线与多边形所有边的交点;(2)把这些交点按x坐标值以升序排列;(3)对排序后的交点进行奇偶配对,对每一对交点间的区域进行填充。
步骤(3)如上图:对y=8的扫描线,对交点序列按x坐标升序排序得到的交点序列是(2,4,9,13),然后对交点2与4之间、9与13之间的所有象素点进行填充。
求交点、排序、配对、填色利用链表:与当前扫描线相交的边称为活性边(Active Edge),把它们按与扫描线交点x坐标递增的顺序存入一个链表中,称为活性边表AEL (AEL, Active Edge List)。
它记录了多边形边沿扫描线的交点序列。
AEL中每个对象需要存放的信息:ymax:边所交的最高扫描线;x:当前扫描线与边的交点;Δx:从当前扫描线到下一条扫描线之间的x增量next:指向下一对象的指针。
伪码:建立ET,置y为ET中非空桶的最小序号;置AEL表为空,且把y桶中ET表的边加入AEL表中;while AEL表中非空do begin对AEL表中的x、Δx按升序排列;按照AEL表中交点前后次序,在每对奇偶交点间的x段予以填充;计算下一条扫描线:y=y+1;if 扫描线y=ymax then 从AEL表中删除这些边;对在AEL表中的其他边,计算与下一条扫描线的交点:x=x +Δx 按照扫描线y值把ET表中相应桶中的边加入AEL表中;endend of algorithm二、区域填充算法:区域可采用两种表示形式:内点表示枚举区域内部的所有像素;内部的所有像素着同一个颜色;边界像素着不同的颜色。
边界表示:枚举出边界上所有的像素;边界上的所有像素着同一颜色;内部像素着不同的颜色。
计算机图形学 第四讲 区域填充
活化边表
把与当前扫描线 相交的边称为活 化边,并把它们 按与扫描线交点 X坐标递增的顺 序存放在一个链 表中,形成活化 边表。
表结构
算法中采用较灵活的数据结构。它由边的分有序边 表ET(Edge Table)和边的活化边表AEL(Active Edge Table )两部分组成。 表结构ET和AET中的基本元素为多边形的边。边 的结构由以下四个域组成: ymax 边的上端点的y坐标; x 在ET中表示边的下端点的x坐标,在 AET中则表示边与扫描线的交点的坐标; Δx 边的斜率的倒数; next 指向下一条边的指针。
四个方向运动 八个方向运动
四连通区域
八连通区域
算法原理:
填充区域边界 以一种颜色指 定,从区域的 一个内部点开 始,由内至外 绘制直到填充算法
设(x,y)为内点表示的4连通区域内的一点,oldcolor为区域的 原色,要将整个区域填充为新的颜色newcolor。内点表示的 4连通区域的递归填充算法: void FloodFill4(int x,int y,int oldcolor,int newcolor) { if(GetPixel(x,y)==oldcolor) { SetPixel(x,y,newcolor); FloodFill4(x,y+1,oldcolor,newcolor); FloodFill4(x,y-1,oldcolor,newcolor); FloodFill4(x-1,y,oldcolor,newcolor); FloodFill4(x+1,y,oldcolor,newcolor); } }
i1
a
i1
i
a
其中 x
b 为常数, a
交点数的处理
第4章多边形填充算法
E2
E5
E3 E4
边缘填充算法示意图
1.边缘填充算法(正负相消法) 基本原理是:对每一条扫描线,依次求与多边形各边 的交点,将该扫描线上交点右边的所有像素求补。多 边形所有边处理完毕,填充即完成。
优点:简单易行 缺点:多边形外的像素处 理过多,输入输出量大
算法改进
• ቤተ መጻሕፍቲ ባይዱ围盒 • 栅栏
带包围盒的多边形
第4章 多边形填充算法
4.3 边缘填充算法
4.3.1 填充原理
• 求出多边形的每条边与扫描线的交点 • 将交点右侧的所有像素颜色全部取为补
色。 • 按任意顺序处理完多边形的所有边。
4.3.2 填充过程
假定边的访问顺序为E0、E1、E2、E3、E4、E5和E6。
P1(x1,y1)
E1
E0
E6
P0(x0,y0)
缺点:某些像素被重复取补
3.边标志填充算法
基本思想:先用一种特殊的颜色在帧缓存中将多边形 的边界(水平边除外)勾画出来,然后将着色的像素点依x 坐标递增的顺序两两配对,再将每一对像素所构成的扫描线 区间内的所有像素置为填充色。
3.边标志填充算法
①打标记:对多边形边界所在像素置一个特殊标志。按照 “下闭上开”的原则处理局部最低点为两个交点,局部 最高点为0个交点。
② 填充:对于每条与多边形相交的扫描线,依照“左闭 右开”的原则从左至右逐个访问该扫描线上的像素,并 着色。
3.边标志填充算法
栅栏填充算法
栅栏:一条过多边形顶点且与扫描线垂直的直线,它将 多边形分成两半,只要将栅栏与多边形之间的像素求补 即可。
缺点:某些像素被重复取补
栅栏填充算法
基本原理:对于每条扫描线与多边形的交点,将交点与栅栏 之间的扫描线上的像素取补,也就是说,若交点位于栅 栏左边,则将交点之右、栅栏之左的所有像素取补;若 交点位于栅栏右边,则将栅栏之右、交点之左的所有像 素取补。
图形学_06_二维图形填充
⑷.对于多边形的水平边 , 则不计它与扫描线 对于多边形的水平边,
的交点。 的交点。
F H G C
E G′ D ℓ m
A
B
如图: 与扫描线ℓ 如图 : ① 边 AB与扫描线 ℓ 与扫描线 交点不计,则扫描线ℓ 交点不计 , 则扫描线ℓ与边 HA有一 ( 下方) 交点A, 有一( 下方 ) 交点 , 有一 只计一次,与边BC有一交 只计一次 , 与边 有一交 下方) , 则填充AB。 点 ( 下方 ) B, 则填充 。
Ymax Ymin中的 中的X 中的
1 m
下一结点地址
8 7 6 5 4 3 2 1 0 ∧ ∧ 3 7 ∧ 9 2 ∧ 9 7
e3 e3
−5 2
∧ ∧ e5 e2
e4 11 7
3 2
∧
11 13 0 0
−5 2
e1
e6 5 7
3 2
∧
② 有效边表(当前边表AET) 有效边表(当前边表AET) 为一动态链表, 由一系列边结点组成, 为一动态链表 , 由一系列边结点组成 , 表 示当前扫描线与所有相关的边求出的交点, 示当前扫描线与所有相关的边求出的交点, 且 按 X 从小 到大排 序 。 当 该边处 理完毕 , 则 从 AET中删除,若ET中有相关边,则加入到 中删除, 中有相关边, 中删除 中有相关边 则加入到AET, , 直至ET、 全为空。 直至 、AET全为空。 全为空 以下图为例: 以下图为例:
四连通区域
八连通区域
1、简单填充算法 基本思想: 从多边形内部任一点(象素 象素)出 基本思想 : 从多边形内部任一点 象素 出 左上右下”顺序判断相邻象素, 发,依“左上右下”顺序判断相邻象素,若其 不是边界象素,对其填充,并重复上述过程, 不是边界象素,对其填充,并重复上述过程, 直到所有象素填充完毕——称四向种子填充算 称四向种子填充算 直到所有象素填充完毕 法。
算法系列之十二:多边形区域填充算法--递归种子填充算法
算法系列之十二:多边形区域填充算法--递归种子填充算法平面区域填充算法是计算机图形学领域的一个很重要的算法,区域填充即给出一个区域的边界(也可以是没有边界,只是给出指定颜色),要求将边界范围内的所有象素单元都修改成指定的颜色(也可能是图案填充)。
区域填充中最常用的是多边形填色,本文中我们就讨论几种多边形区域填充算法。
一、种子填充算法(Seed Filling)如果要填充的区域是以图像元数据方式给出的,通常使用种子填充算法(Seed Filling)进行区域填充。
种子填充算法需要给出图像数据的区域,以及区域内的一个点,这种算法比较适合人机交互方式进行的图像填充操作,不适合计算机自动处理和判断填色。
根据对图像区域边界定义方式以及对点的颜色修改方式,种子填充又可细分为几类,比如注入填充算法(Flood Fill Algorithm)、边界填充算法(Boundary Fill Algorithm)以及为减少递归和压栈次数而改进的扫描线种子填充算法等等。
所有种子填充算法的核心其实就是一个递归算法,都是从指定的种子点开始,向各个方向上搜索,逐个像素进行处理,直到遇到边界,各种种子填充算法只是在处理颜色和边界的方式上有所不同。
在开始介绍种子填充算法之前,首先也介绍两个概念,就是“4-联通算法”和“8-联通算法”。
既然是搜索就涉及到搜索的方向问题,从区域内任意一点出发,如果只是通过上、下、左、右四个方向搜索到达区域内的任意像素,则用这种方法填充的区域就称为四连通域,这种填充方法就称为“4-联通算法”。
如果从区域内任意一点出发,通过上、下、左、右、左上、左下、右上和右下全部八个方向到达区域内的任意像素,则这种方法填充的区域就称为八连通域,这种填充方法就称为“8-联通算法”。
如图1(a)所示,假设中心的蓝色点是当前处理的点,如果是“4-联通算法”,则只搜索处理周围蓝色标识的四个点,如果是“8-联通算法”则除了处理上、下、左、右四个蓝色标识的点,还搜索处理四个红色标识的点。
计算机图形学多边形填充算法

计算机图形学多边形填充算法计算机图形学中的多边形填充算法是指将给定的多边形区域进行颜色填充,以使其完全填充的过程。
在图形学中,多边形是由一系列连续的线段组成的封闭图形。
填充算法可用于渲染图形、绘制图像等应用场景。
多边形填充算法的目标是根据设计要求和用户输入,给定一个多边形的边界,将多边形的内部区域进行颜色填充。
填充算法的实现涉及到图像的扫描线和区域判定,以确定填充的区域和颜色。
在本文中,我们将介绍常见的多边形填充算法,包括扫描线填充算法、边界填充算法等,并讨论它们的优缺点和适用场景。
扫描线填充算法扫描线填充算法是一种常见且简单的多边形填充算法。
该算法将多边形划分为一条条水平扫描线,并通过判断扫描线与多边形边界的交点,确定填充区域。
具体步骤如下:1.找到多边形边界的最上端和最下端。
2.从最上端开始,逐行进行扫描。
3.在每一行,通过求解扫描线与多边形边界的交点,确定填充区域。
4.对于每个填充区域,根据设计要求进行颜色填充。
扫描线填充算法的优点是简单易懂、实现较为容易。
然而,该算法存在一些缺点。
首先,对于具有复杂形状的多边形,扫描线填充算法可能会产生很多不必要的计算,导致效率降低。
其次,该算法需要处理多边形边界相交的情况,可能出现像素重复填充的问题,需要进行额外的处理。
边界填充算法边界填充算法是另一种常见的多边形填充算法。
与扫描线填充算法不同的是,边界填充算法是从多边形的边界出发,向内部填充颜色。
该算法的基本思想是对多边形的每条边进行填充,最终得到多边形的填充区域。
具体步骤如下:1.遍历多边形的每条边,保存每条边的起点和终点。
2.对于每个边,根据设计要求进行颜色填充。
3.对于多边形内部的区域,根据边界的颜色填充。
边界填充算法的优点是适用于复杂形状的多边形,无需处理边界相交的问题。
然而,该算法的实现相对复杂,需要处理边界的细化以及边缘像素重复填充的问题。
适用场景不同的多边形填充算法在不同场景下有不同的适用性。
《计算机图形学教学资料》第6讲-多边形填充
05
多边形填充的未来发展
新型填充算法的研究
基于物理的填充算法
模拟真实世界的物理现象,如流体动 力学、表面张力等,以实现更加自然 的多边形填充效果。
智能优化算法
利用遗传算法、模拟退火等智能优化 技术,自动寻找最优的填充方案,提 高填充效率和准确性。
人工智能在多边形填充中的应用
学习型填充算法
通过机器学习技术,让算法自动学习优秀的人类设计师的填充风格,实现更加 艺术化的多边形填充效果。
优化内存管理
合理分配和释放内存,避免频繁的内 存分配和释放操作,可以提高多边形 填充的性能。
04
多边形填充的实践案例
使用OpenGL实现多边形填充
总结词
使用OpenGL进行多边形填充是一种常见的图形编程实践,它涉及到顶点数据、着色器程序和渲染流程的配置。
详细描述
首先,你需要定义多边形的顶点坐标,并将其存储在一个顶点数组中。然后,你需要编写一个OpenGL着色器程 序,用于处理顶点数据并进行渲染。在渲染过程中,你需要设置正确的顶点属性、着色器程序和渲染流程,以确 保多边形能够正确填充颜色。
填充区域
填充区域指的是多边形的内部区域,即所有被填充 的像素组成的区域。
填充颜色
填充颜色是指用于填充多边形内部的颜色,可以根 据需要选择不同的颜色。
填充算法的分类
扫描线填充算法
扫描线填充算法是一种基于扫 描线的填充算法,通过从左到 右、从上到下扫描多边形的内 部像素,对落在多边形内部的 扫描线进行上色。
在游戏开发中应用多边形填充
总结词
在游戏开发中应用多边形填充技术可以创建 更加逼真的游戏场景和角色模型。
详细描述
游戏开发者通常使用游戏引擎(如Unity或 Unreal Engine)来创建游戏场景和角色模 型。在这些引擎中,多边形填充技术被广泛 应用,以实现更加逼真的场景和角色模型。 通过合理配置顶点数据、着色器程序和渲染 流程,游戏开发者可以创建出令人惊叹的游 戏视觉效果。
第四讲 区域填充
多边形分为凸多边形、凹多边形、含内环的多边形。
4.1多边形的扫描转换
多边形的表示方法
顶点表示
点阵表示
顶点表示:用多边形顶点的序列来刻划多边形。 直观、几何意义强、占内存少;不能直接用于 面着色。 点阵表示:用位于多边形内的象素的集合来刻 划多边形。失去了许多重要的几何信息;便于 运用帧缓冲存储器表示图形,易于面着色。
=xi+(-b/a)= xi+1/m
因此,利用这种边的相关性,我们不需算出边线与各 扫描线的全部交点,只需以边为单位,对每条边建立 一个边记录即可,其内容如下(P35): 边记录 ymax xi 1/m next
奇点的处理
当扫描线与多边形P的交点是P的顶点时,则 称该交点为奇点。
多边形P的顶点可分为两类:极值奇点和非极值奇 点。如果(yi-1 - yi)(yi+1 - yi)≥0,则称顶点Pi 为极值点;否则称Pi为非极值点。 规定:奇点是非极值点时,该点按两个交点计算, 否则按一个交点计算。
点阵字符:存储量大,易于显示
矢量字符:存储量小,美观,变换方便; 但需 要光栅化后才能显示。
字符属性
字体 宋体 仿宋体 楷体 黑体 隶书
字高 宋体 宋体 宋体 宋体
字宽 大海 大海 大海 大海
字倾斜角
倾斜 倾斜
对齐 (左对齐、中心对齐、右对齐)
字色 红色、绿色、蓝色
3)按“右上左下”的顺序检查与出栈像素相邻的四个像素,若 其中某个像素不在边界上且未置成多边形色,则把该像素入栈。
(2)内点表示的四连通区域种子填充算法
基本思想:从多边形内部任一点(像素)出发,按照“右上左下” 的顺序判断相邻像素,若是区域内的像素,则对其填充,并重复 上述过程,直至所有像素填充完毕。
任意多边形区域的快速填充算法

任意多边形区域的快速填充算法一、前言任意多边形区域的快速填充算法是计算机图形学中的一个重要问题,其应用广泛,例如在计算机游戏、数字地图等领域中都有广泛的应用。
本文将介绍几种常见的任意多边形区域的快速填充算法,包括扫描线算法、边界填充算法、种子填充算法等。
二、扫描线算法扫描线算法是一种基于扫描线原理的填充算法,其基本思想是将区域划分为若干个水平方向上的扫描线,然后在每条扫描线上找到交点,并根据交点进行填充。
具体步骤如下:1. 将多边形顶点按照纵坐标从小到大排序;2. 从最小纵坐标开始,依次向上扫描每条水平方向上的线段;3. 对于每条水平方向上的线段,找到与之相交的多边形边界,并记录下所有交点;4. 根据相邻两个交点之间是否为奇数个来确定是否需要进行填充。
三、边界填充算法边界填充算法也是一种常见的任意多边形区域的快速填充算法,其基本思想是通过递归调用来进行填充。
具体步骤如下:1. 对于每个多边形边界上的像素点,将其标记为“边界点”;2. 从任意一个未填充的内部像素点开始,向四周搜索,如果遇到“边界点”则停止搜索,并将搜索路径上的所有像素点标记为已填充;3. 重复步骤2直到所有内部像素点都被填充。
四、种子填充算法种子填充算法也是一种常见的任意多边形区域的快速填充算法,其基本思想是通过找到一个内部像素点作为“种子”,然后向四周扩散进行填充。
具体步骤如下:1. 随机选择一个内部像素点作为“种子”,并将其标记为已填充;2. 向四周搜索,如果遇到未被标记为已填充的像素,则将其标记为已填充,并加入到待处理列表中;3. 重复步骤2直到待处理列表为空。
五、总结以上介绍了几种常见的任意多边形区域的快速填充算法,每种算法都有其特定的优缺点,选择合适的算法需要根据具体的应用场景进行考虑。
在实际应用中,还需要考虑算法的效率、稳定性、可扩展性等方面的问题。
多边形区域填充算法
}
p=p->next;
}
} //按照xi值的大小将当前ET表中的记录放置到AET表中
Enode<int> *f,*g;
if(etp.a[0])
{
f=etp.a[0];
while(f->next)
{
g=f;
f=f->next;
for(int j=g->xi;j<=g->next->xi;j++)
putpixel(j,i,color);
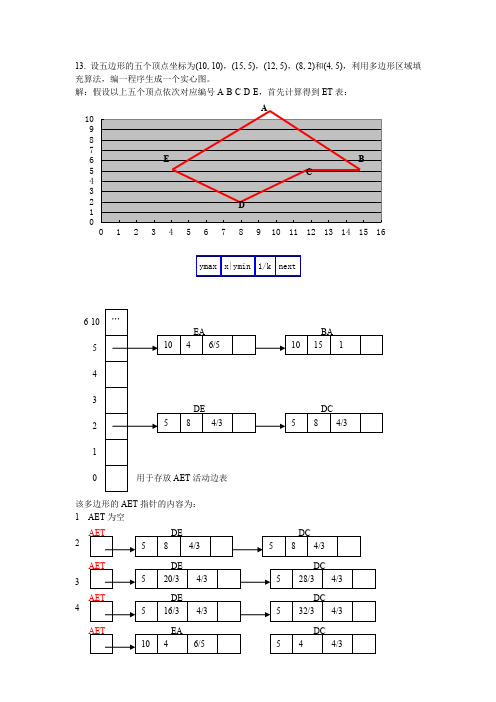
该多边形的AET指针的内容为:
1 AET为空
2
3
4
5
6
7
8
9
10
具体编程实现如下:
第1步:(1)根据输入的五个顶点坐标找到y值最小的点(例如点D,此时y=2),并找到与D有边关系的两个顶点(此时为E和C),在y=2处建立ET边表记录(ymax、xi和m值均可通过顶点坐标间的计算得到,例如DE边的建立,特别注意:当D点和E点y坐标值相同时,也即是DE与x轴平行,该边不能计入ET边表),之后标记D点被访问过;(2)排除访问过的点以及和该点相关联的边,重复(1)直至将ET表建立完善。
template <class T>
struct Enode
{
Enode() {next=NULL;}
Enode(T pymax, float pxi, float pm, Enode *pnext)
{
ymax=pymax; xi=pxi;
m=pm; next=pnext;
}
T ymax, xi; //ymax表示最大的y值,xi表示最底端点的x坐标值
a[u]=p;
算法系列之十二:多边形区域填充算法--扫描线填充算法(有序边表法)

算法系列之⼗⼆:多边形区域填充算法--扫描线填充算法(有序边表法)⼆、扫描线算法(Scan-Line Filling)扫描线算法适合对⽮量图形进⾏区域填充,只需要直到多边形区域的⼏何位置,不需要指定种⼦点,适合计算机⾃动进⾏图形处理的场合使⽤,⽐如电脑游戏和三维CAD软件的渲染等等。
对⽮量多边形区域填充,算法核⼼还是求交。
《计算⼏何与图形学有关的⼏种常⽤算法》⼀⽂给出了判断点与多边形关系的算法――扫描交点的奇偶数判断算法,利⽤此算法可以判断⼀个点是否在多边形内,也就是是否需要填充,但是实际⼯程中使⽤的填充算法都是只使⽤求交的思想,并不直接使⽤这种求交算法。
究其原因,除了算法效率问题之外,还存在⼀个光栅图形设备和⽮量之间的转换问题。
⽐如某个点位于⾮常靠近边界的临界位置,⽤⽮量算法判断这个点应该是在多边形内,但是光栅化后,这个点在光栅图形设备上看就有可能是在多边形外边(⽮量点没有⼤⼩概念,光栅图形设备的点有⼤⼩概念),因此,适⽤于⽮量图形的填充算法必须适应光栅图形设备。
2.1扫描线算法的基本思想扫描线填充算法的基本思想是:⽤⽔平扫描线从上到下(或从下到上)扫描由多条⾸尾相连的线段构成的多边形,每根扫描线与多边形的某些边产⽣⼀系列交点。
将这些交点按照x坐标排序,将排序后的点两两成对,作为线段的两个端点,以所填的颜⾊画⽔平直线。
多边形被扫描完毕后,颜⾊填充也就完成了。
扫描线填充算法也可以归纳为以下4个步骤:(1) 求交,计算扫描线与多边形的交点(2) 交点排序,对第2步得到的交点按照x值从⼩到⼤进⾏排序;(3) 颜⾊填充,对排序后的交点两两组成⼀个⽔平线段,以画线段的⽅式进⾏颜⾊填充;(4) 是否完成多边形扫描?如果是就结束算法,如果不是就改变扫描线,然后转第1步继续处理;整个算法的关键是第1步,需要⽤尽量少的计算量求出交点,还要考虑交点是线段端点的特殊情况,最后,交点的步进计算最好是整数,便于光栅设备输出显⽰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{
int i=1; //i作为控制变量标识扫描线
while(i<ep-1)
{
if(etp.a[i]!=NULL)
{
Enode<int> *p,*r;
p=etp.a[i];
r=etp.a[0];
{
stack_list *new_node;
new_node=new stack_list();
new_node->x=xx;
new_node->y=yy;
new_node->next=stack;
stack=new_node;
}
//pop an element
void pop(int &xx,int &yy)
int color=5; //color用于标识填充颜色
ET<int> et(e);
et.Insert(2,5,8,4/3);
et.Insert(2,5,8,-4/3);
et.Insert(5,10,15,-1);
et.Insert(5,10,4,6/5); //根据初始数据建立边表
po_fill(et, e, color); //调用填充函数
int n; //覆盖该多边形的扫描线的总数,从0开始计数
Enode<T> **a;
}; //定义了边表类
template <class T>
ET<T>::ET(int mSize)
{
n=mSize;
a=new Enode<T> *[n];
for(int i=0;i<n;i++) a[i]=0;
} //ET边表的初始化
1
2
3
4
5
6
15.用扫描线种子填充算法,编写一个填充多边形区域的程序。
该测试多边形的各个端点坐标分别为:
A(50, 150),B(50, 100),C(100, 50),D(250, 50),E(200, 150);
F(100, 100),G(100, 75),H(175, 135);
/****************************************************************************
{
putpixel(x0,y,4);
x0=x0-1;
}
xl=x0+1;//记录最左值
xlold=xl;//再记录一次最左值,以备后用
y0=y+1;//go up向上移一条扫描线
go2=0;//go2也只是一个用来标记的变量
while(xr>xl&&go==0)//查找上一条线的最右值,并记录为xr
{
} //把一对相邻结点的xi区间范围进行填充
}
if(etp.a[0]!=NULL)
{
Enode<int> *w;
int s=1;
while(s)
{
Enode<int> *z=NULL;
w=etp.a[0];
s=0;
while(w && w->ymax!=i)
{
z=w; w=w->next;
}
if(!w) break;
int x;
int y;
stack_node *next;
};
typedef stack_node stack_list;
typedef stack_list *link;//用单链表来表示堆栈
link stack = 0; //stack标识栈顶指针
//push an element
void push(int xx,int yy)
if(z) z->next=w->next;
else etp.a[0]=w->next;
delete w;
s=1;
} //删去AET表中i值已经等于ymax的结点记录
if(etp.a[0])
{
Enode<int> *u,*v;
u=etp.a[0];
while(u)
{
v=u;
u=u->next;
v->xi=v->xi+v->m;
int go=0,go2=0;
int i=0;
push(x,y);//种子像素入栈
while(stack!=0)//如果栈不空则循环,stack==0表示栈空
{
go=0; //go只是一个标记
pop(x,y); //从栈中将栈顶元素弹出
putpixel(x,y,4); //将该点置色
x0=x+1;//取种子右边的像素
while(getpixel(x0,y)!=4)//fill right填充右边像素
{
putpixel(x0,y,4);
x0=x0+1;
}
xr=x0-1;//记录最右值
xrold=xr;//再记录一次最右值,以备后用
x0=x-1;//取种子左边的像素
while(getpixel(x0,y)!=4)//fill left填充左边像素
扫描的次序:先上后下
进栈的次序:先右后左
测试数据:
第一个多边形:A(50, 150),B(50, 100),C(100, 50),D(250, 50),E(200, 150);
第二个多边形:F(100, 100),G(100, 75),H(175, 135);
*****************************************************************************/
if(r->xi>q->xi) {etp.a[0]=q; q->next=r;}
else {
while(q->xi>r->xi && r->next)
r=r->next;
if(r->next) {q->next=r->next; r->next=q; }
else {r->next=q; q->next=NULL;}
[注]边关系的建立可通过邻接矩阵的数据结构实现,权值可以为该矩阵行编号对应点的y坐标值,ET边表采用邻接表的数据结构
第2步:根据ET表构建AET表,并逐行完成多边形填充,具体的C++代码如下:
(1)建立头文件base_class.h,主要是边表结点结构体和ET边表类的实现
enum ResultCode{Success, Failure};
14.已知多边形各顶点坐标为(2, 2)(2, 4)(8, 6)(12, 2)(8, 1)(6T及全部AET内容。
解:如图所示:
则该多边形的ET表为:
6
5
4
3
2
1
该多边形的AET指针的内容为:(每条扫描线均有3行指针链,第1行表示将ET表加入AET中,第2行表示从AET表中删去yi=ymax,第3行表示xi=xi+1/m后,学生只要写出第2行即可)
template <class T>
ET<T>::~ET()
{
Enode<T> *p, *q;
delete a[0];
for(int i=1;i<n;i++)
{
p=a[i]; q=p;
while(p)
{
p=p->next;
delete q;
q=p;
}
}
delete []a;
} //析构函数负责回收内存空间
}
}
p=p->next;
}
} //按照xi值的大小将当前ET表中的记录放置到AET表中
Enode<int> *f,*g;
if(etp.a[0])
{
f=etp.a[0];
while(f->next)
{
g=f;
f=f->next;
for(int j=g->xi;j<=g->next->xi;j++)
putpixel(j,i,color);
}
} //用xi+m来替代原有的xi
}
i++; //进入下一条扫描线
}
}
void main()//主函数的实现
{
int gdriver, gmode;
gdriver=DETECT;
gmode=VGAHI;
initgraph(&gdriver, &gmode,""); //图形系统初始化
int e=11;
本程序实现区域填充功能,首先输入多边形顶点的个数,回车,
然后依次输入各顶点的坐标格式如下:100,123回车
一定要在中间用逗号隔开噢,输完最后一个点后,屏幕上会依次
画出各条边,最后填充满
程序还不完善,比如颜色值应该用变量表示以易于修改,画多边形和求种子点
应该做成独立的函数等等,以后再做上吧,这是细节的问题
template <class T>
ResultCode ET<T>::Insert(int u, T ymax, float xi, float m)
{
if(u<0||u>n-1) return Failure;