不确定的Lu系统的自适应Backstepping控制
反步法及其在自适应控制中的应用

( 常 , : ,一、引言显然,如果 则近年来,反步法或后推法(bac kst epp ing )引起了有关学 渐进稳定。
但通 ,因 者的高度重视,并在航天航空和机器人控制设计中得到了成功 此我们需要引入虚拟控制使 的应用。
在文献[1]中介绍的是用自适应反馈线性化来设计模型得误差具有期望的渐进性 参考自适应控制器,由于参数估计的高阶倒数将出现在高阶系态。
为此,我们进行下一步 统的控制律中,所以此方法不能应用于通过反馈进行线性化的 ( )4设计 所有系统中。
第二步定义取则基于文献[2],我们提出了另外一种非线性设计方法反步法。
并举例说明了它在自适应控制器设计中的应用。
控制器的设计基 于backs tep pin g 思路,在每一步设计中,都可以得到一个由V 函数,不确定参数的自适应调节函数和一个已知李亚普诺夫函数的虚拟控制系统的镇定函数组成的三元组,整个系统的V 函数和自 适应控制律由最后一步得出。
它适用于可状态线性化或严参数反馈的不确定系统,可以方便的用符号代数软件来实现。
应用此方(5) 法所设计出来的自适应控制器可保证整个非线性系统的稳定性, 通过适当的引入虚拟控制,使得其与虚拟反馈间具有某种渐近特同理,我们还需要引入虚拟控制 ,使得 具有 性,从而实现整个系统的渐近镇定。
期望的渐进性态,以此类推,可得到一般情形下的李雅普诺夫函 二、基于反步法的控制器的设计方法简介数及虚拟控制。
第 步:定义李雅普诺夫函数 及虚拟控制 为考虑单输入单输出非线性系统其中,为系统的状态变量,为系统的输入变量。
非线性部分呈下三角结(6) 构。
反步法的设计思想是视每一个子系 则有:统 中的为虚拟控制,通过确定适当的虚 拟 反馈使得系统的前面状态达到渐进稳 在最后一步可得 定。
但系统的解一般不满足次, 因此, 我们引进误差变量,期望通过控制的作 用,使得与虚拟反馈键具有某种渐进特 选取反馈控制规律为: ()7性,从而实现整个系统的渐进镇定。
一类不确定非线性系统基于SVR的Backstepping自适应跟踪控制
21 0 2年 9月
东 南 大 学 学 报 (自然科 学版 )
J R L O OU H AS I R IY ( aua SineE io ) OU NA FS T E TUN VE ST N trl c c dt n e i
Vo. 142
Absr c :A n a a tv o ln a o to lri e eo e o b n n c t p i g tc n q e wih t e ta t d p i e n n i e rc nr le s d v l p d c m i i g ba kse p n e h i u t h
!
I
戈 = 贾) △ ) g( ) + g( + I ( + ( + “ △ 贾) d
y=
误差 、 存在未 知外 界 扰 动 等 控制 问题 时 , 果并 不 效 理想 . 。
为 弥补 传统 自适应 B c s p ig控 制 的 不足 , ak t pn e 解 决多 种不 确定 因素作 用 下 的非线 性 系 统 控 制 问 题 , 多学 者将 智 能控 制 方 法 引入 其 中. 别 是 随 诸 特 着神 经 网络的发 展 , 们利 用神经 网络 能够 以任 意 人 理想精 度 逼近平 滑非 线性 函数 的特性 , 系统未 知 对 不确 定性 进行逼 近 , 合 自适 应 B cs p ig控 制 结 akt p e n 方法 , 设计 具有 较 强鲁 棒 性 的 非线 性 控 制 器 , 得 取 了一 系列 研究成 果 ” . 同样 基于 “ ” 核 的学 习 方法 , 支持 向量 机 (u . sp p r vco cie S M )自 2 ot etrmahn , V 0世 纪 9 0年 代 由 Vank1 提 出 以来 , p i ] 4 理论 研究 和算 法 实 现 上 都 取 得 了突 破性进 展 . 同于神 经 网络 , 持 向量 机 建 不 支 立在 结构 风 险最 小 化 (t cua r kmii zt n, su trl i nmia o r s i S M) R 原则 基 础 之上 , 不存 在 “ 数 灾 难 ” “ 学 维 和 过 习” 问题 , 广 性 好 , 解 决 控 制 问题 上 也 取 得 了 推 在 较 大进 展 . 于神 经 网络 的 控 制方 法 与基 于支 基 持 向量 机 的控 制方 法 的主要不 同点 在于 , 前者 通过 调 节未 知 的网络互 联权值 来 实现参 数 的优化 , 而后 者 将状 态 向量序 列作 为未 知 参 数 向量 的一 部分 进 行 优 化 计 算 . 径 向 基 函数 (ail ai fn . 就 rda b s u c s t n R F 神经 网络而 言 , 隐层节 点数 目, 向基 i ,B ) o 其 径 函数 中心 和宽度 需要依 赖 于经验 进行设 定 , 而支持 向量机 则 在对偶 空 间 的优 化 计 算 过程 中 自动 确定 函数参 数 , 有更 强 的适 应性 . 具 本 文在 相关 研究基 础 上 , 针对 一类 不确 定非线 性 系 统 , 支 持 向量 回 归 (u p r vco c ie 将 sp ot etrmahn rges n S e rs o ,VR) B c s p ig控制 方法 相 结合 , i 与 akt pn e 基 于 B cs p i akt pn e g方法 构造镇 定控 制器 , 采用 S R V 逼 近系统 非线性 过程 不确 定项 , 引入 自适应 算法 调 节S VR权 值 , 最终 得 到 满 足 闭环 系统 全 局 渐 近 稳 定 的控制 器 . 过 对 典 型系 统 的 仿 真分 析 表 明 , 通 该 控制 方法 控制效 果 较好 , 具有 一定 的鲁棒 性 . 且
一类输入受限的不确定非线性系统自适应 Backstepping变结构控制

一类输入受限的不确定非线性系统自适应 Backstepping变结构控制李飞;胡剑波;王坚浩;汪涛【摘要】针对一类输入受限的不确定非线性系统,提出了一种自适应Backstepping变结构控制器设计方法.建立了受未知非线性特征约束的执行器故障模型,可以描述系统存在死区、齿隙、饱和、滞回等输入受限情形以及可能发生的执行器失效、卡死等故障情形.设计径向基函数神经网络补偿未建模动态项,引入一阶低通滤波器避免了Backstepping控制中的计算复杂性问题.自适应近似变结构控制能够有效削弱控制信号抖振.理论分析和仿真实验结果证明,提出的自适应鲁棒控制律能够在输入受限的情况下自适应地调节控制输入,使得闭环系统稳定且满足控制性能要求.%An adaptive Backstepping sliding mode control method is proposed for a class of uncertain nonlinear systems with input constraints.A model for the nonlinear actuator is developed, which includes input constrained situations such as dead zone, backlash, saturation, hysteresis, and unknown faults such as partial loss of effectiveness fault and actuator stuck fault.Radial basis function neural network is employed to approximate the unknown nonlinear functions.The explosion of complexity is avoided in the traditional Backstepping design method by introducing a first order filter.Adaptive approximate variable structure control is effective to reduce the chatting of the control signal.Theoretical analysis and simulation results are presented to demonstrate the effectiveness of this method by adaptively adjusting control input.【期刊名称】《系统工程与电子技术》【年(卷),期】2017(039)008【总页数】11页(P1823-1833)【关键词】未知非线性;未知故障;不确定性;自适应Backstepping控制;径向基函数神经网络【作者】李飞;胡剑波;王坚浩;汪涛【作者单位】空军工程大学理学院, 陕西西安 710051;空军工程大学装备管理与安全工程学院, 陕西西安 710051;空军工程大学装备管理与安全工程学院, 陕西西安710051;空军工程大学装备管理与安全工程学院, 陕西西安 710051【正文语种】中文【中图分类】TP273物理器件的固有特性、机械设计和制造偏差、外部环境干扰以及安全因素的制约,使得死区、齿隙、饱和以及滞回等非线性特征不可避免地存在于机械系统、伺服系统、压电系统等实际控制系统中,使得系统控制信号受到一定的约束限制,影响被控系统的性能,甚至会造成系统出现发散、震荡等不稳定情况。
具有参数不确定性的轮式移动机器人自适应backstepping控制

具有参数不确定性的轮式移动机器人自适应backstepping控制孙棣华;崔明月;李永福【期刊名称】《控制理论与应用》【年(卷),期】2012(29)9【摘要】针对参数不确定的轮式移动机器人的轨迹跟踪问题,设计自适应跟踪控制器.基于移动机器人的动力学模型,采用backstepping积分方法,通过逐步递推选择适当的Lyapunov函数,设计基于状态反馈的自适应控制器,并进行了相应的稳定性分析.与传统PID控制进行仿真对比,结果表明提出的自适应控制策略能较好地补偿系统参数摄动的影响,提高了移动机器人的轨迹跟踪性能和鲁棒性.%Based on the dynamics model of wheeled mobile robots, an adaptive backstepping method is used to design the controller for tracking the trajectory of wheeled mobile robots with parameter uncertainties. The adaptive control laws based on the state feedback are developed with backstepping approach through a step-by-step selection of appropriate Lyapunov function. The motion stability of the wheeled mobile robot is proved by using the Lyapunov stability theory. Simulation results show that the proposed method greatly compensates the effects of parameter uncertainties and improves the system tracking accuracy and robustness, in comparison with traditional PID control laws.【总页数】7页(P1198-1204)【作者】孙棣华;崔明月;李永福【作者单位】重庆大学自动化学院,重庆400044;重庆大学自动化学院,重庆400044;重庆大学自动化学院,重庆400044【正文语种】中文【中图分类】TP273【相关文献】1.具有参数不确定性伺服系统的H∞自适应控制器设计 [J], 郭庆鼎;于善涛2.具有非线性不确定参数的电液伺服系统自适应backstepping控制 [J], 林浩;李恩;梁自泽3.具有可参数化不确定性系统的对偶自适应模型预测控制 [J], 曹文祺; 李少远4.一类具有非线性参数不确定性的系统的自适应控制 [J], 沈海峰;陈彭年5.具有参数和负载不确定性的感应电机自适应反步控制 [J], 张兴华因版权原因,仅展示原文概要,查看原文内容请购买。
不确定系统的自适应反步控制

不确定系统的自适应反步控制系统中的不确定性是指描述被控对象及其所处环境的数学模型是不完全确定的,其中可能包含某些未知因素或随机因素。
客观地说,任何一个实际系统都具有不同程度的不确定性。
它们可能表现在系统内部,也可能表现在系统外部。
系统内部的不确定性通常指的是描述被控对象的数学模型的结构和参数存在的不确定性,如未建模动态,未知系统参数和未知控制系数,设计者事先不能确切知道。
而系统外部的不确定性则可能来自于不可预知的执行器延迟或随机性的扰动等,例如时间大小不可预知的确定性的常值控制输入时延以及统计特性未知的随机性测量噪声等。
如果在进行控制设计的时候不充分考虑这些不确定性的影响,则被控对象的性能可能达不到所要求的效果,严重的甚至可能会导致系统不稳定。
面对这些客观存在的各式各样的不确定性,如何设计适当的控制律,使闭环系统稳定,并能实现某些期望的性能指标,是自适应控制所要研究解决的问题。
本论文的主要研究对象为不确定非线性时变系统、不确定线性最小相位系统、不确定线性时滞系统等多种类型的不确定对象,采用的主要控制手段是一种使用非常广泛的自适应反步控制方法(Adaptive Backstepping)。
因为被控对象的多样性,传统的自适应Backstepping方法无法实现所期望的控制目标,所以本论文针对不同的被控系统,对Backstepping方法进行了改进,也将这种方法与其它的控制方法进行了适当的结合,通过研究取得了以下的成果,(1)针对具有参数化严格反馈形式的带有跳变参数的非线性时变系统提出了一种基于模块的自适应反步控制方法。
这里考虑的未知参数既包括连续时变参数,也包括分段跳变参数,而且它们不必局限于缓慢时变或非频繁跳变,控制器模块和参数估计器模块这两个模块的设计是相互独立的。
稳定性分析显示整个闭环系统信号是全局一致有界的,关于参数变化速率的均方意义下的跟踪误差性能也得到了保证。
(2)针对不确定最小相位线性系统提出了一种新的基于输出反馈的自适应反步控制方法。
不确定的Lü系统的自适应Backstepping控制
不确定的Lü系统的自适应Backstepping控制
封希媛;李医民
【期刊名称】《西安科技大学学报》
【年(卷),期】2013(033)004
【摘要】混沌反控制模型Lü系统连接了著名的Lorenz系统和Chen系统,并代表了它们之间的连续演变.针对混沌系统的控制问题,已有很多控制方法.本文是针对Lü系统参数未知情形,研究了混沌控制在Lü系统中的问题,并将Lü系统转换成一种非线性的一般严格反馈形式,利用自适应Backstepping设计方法,针对Lü系统的三个未知参数,结合Lü系统的特性设计出一种新的自适应控制器,保证闭环系统全局稳定,仿真结果表明了该方法的可行性和有效性.
【总页数】4页(P466-469)
【作者】封希媛;李医民
【作者单位】青海民族大学计算机学院,青海西宁810007;江苏大学理学院,江苏镇江212013
【正文语种】中文
【中图分类】TP273
【相关文献】
1.模型不确定非线性系统的自适应模糊Backstepping预测控制 [J], 郑兰;周卫东;廖成毅;程华
2.具有非线性不确定参数的电液伺服系统自适应backstepping控制 [J], 林浩;李
恩;梁自泽
3.基于 ELM 的一类不确定性纯反馈非线性系统的Backstepping 自适应控制 [J], 李军;石青
4.一类输入受限的不确定非线性系统自适应 Backstepping变结构控制 [J], 李飞;胡剑波;王坚浩;汪涛
5.一类不确定非线性系统的鲁棒自适应Backstepping控制 [J], 粟世玮;张思洋;尤熠然;李雍
因版权原因,仅展示原文概要,查看原文内容请购买。
船舶电力系统自适应Backstepping混沌控制

图 1 船舶 电力系统两机并联模型
=
一 一 打 打
=
一
S
式 中 E- ̄ J ,和 1
分别 为系统 中两 台发 电机 的 电势 ,x 和 X d d分别代 表 两 台发 电机 的 同步 电抗 , ,X
n
分别是 线路 电阻和 电抗 。 由于 船舶 电力 系统 线路 短 ,故线 路 电阻非 常小 ,常 忽略 不计 , P, Q表 示 系 — 统 负载 ,该 图可用 来表 示那 些没有 变压 器 的船舶 电力 系统 。 船 舶 电力系 统一 般采 用 同型 号发 电机 ,分 别 记 : 一 2 6,
力 系统 的容量 有 了显 著提 高 ,这 就对 船舶 电力 系 统 的可靠 性 与稳 定性 提 出 了更高 要求 。近 年来 在船 舶 航行 过程 中发 现 电力 系统 出现 了突 发 或 阵发性 的 混沌振 荡 现象 ,这 对 船舶 电网 的安全 运行 构成 了潜在
的威胁 ,可 能 导致系 统 失稳 l。 J J 目前 已有 的 电力 系统 混沌控 制 方法 主要 是针对 陆 上 电力系 统 的 , 思路一 般是将 成 熟 的控 制 方法 , 其 如 自适 应补偿 控 制 、反馈 控 制 】 一、逆系 统控 制 等[7 5] 到 混沌 系统 的控制 中。船 舶 电力系 统较 陆上 -移植
n
() 1
式 中,H 、D 为等值 转动 惯量和 等值 阻尼 系数 ,P m为发 电机输 入机械 功 率 , 为系 统 的输 出 电磁功 率 。
通过 变换 =f
,(பைடு நூலகம் (, = = f () )
( ,方 程 ( )简 化为 f ) 1
式中 = , D
控 系统 能够 保持 闭环渐 进 稳定 ,并 且辨 识 出 了导致 系 统产 生混 沌振 荡 的参数值 。
弹性高超声速飞行器输入饱和抑制backstepping控制

提出方法的有效性。
关键词:高超声速飞行器;弹性;backstepping;饱和抑制;干扰观测器
中图分类号:V448.2
文献标志码:A
DOI: 10. 13465/j. .nki. .vs. 2019. 20. 007
Saturation restraint of inputs backstepping control for a fexible hypersonic vehicle
Key words: hypersonic vehicle; elasticity; backstepping; saturation restraint; disturbance obse/er
高超声速飞行器是指飞行马赫数大于 5的飞行 器[1]&它具有机动灵活、隐身性高、突防能力强等特 点,可以作为战略突袭武器的发射平台 ,因而受到了各 个航天强国的广泛关注。其中,乘波体构形的吸气式 高超声速飞行器(Aiob/ahing Hypersonic Vehicle, AHV)因具有较高的升阻比,被认为是高超声速飞行器 最好的气动外形⑷,具有广阔的应用前景。
backstepping的输入饱和抑制非线性控制方法。考虑升降舵偏转量对升力的影响,引入新的虚拟控制量精准控制攻角状
态。将机体的弹性模态影响视作一类干扰项,设计非线性干扰观测器对其进行估计,并在控制器中予以补偿。引入非线
性增益函数提高系统控制输入量的饱和抑制能力,并基于李雅普诺夫理论证明了闭环系统的稳定性。仿真分析验证了所
LU Yao, SUN You, LU Kunfeng
( Beo.ongAeaospaceAuiomaiocConiaoeInsioiuie, Be o.ong 100854 , Chona)
backstepping介绍及其在主动悬架控制中的应用

256e-6路面不平度C级路面,10m/s车速
车身加速度:蓝色:backstepping控面 车身加速度
悬架动挠度
车轮动变形
车身加速度
动挠度
车轮动变形
Backstepping介绍及其在主动 悬架控制中的应用
1、backstepping介绍
• Backstepping (反演,反步)是将 Lyapunov 函数的选取与控制器的设计相结 合的一种递归设计方法。它通过从系统的 最低阶次微分方程开始,引入虚拟控制的 概念,一步一步设计满足要求的虚拟控制, 最终设计出真正的控制律。
控制器设计过程1
• 第一步
z1 ' x1 ' x2 f1 x1 z2 1 f1 x1
k1z1 f1 x1
设计虚拟反馈 1
1 2 2 则 v1 z1 , v1 ' z1 z1 ' k1 z1 z1 z2 2
若z2=0,则z1渐进稳定,但一般情况下z2≠0, 所以需要进一步引入虚拟控制α2,使其误差 z2具有期望的渐进稳定
控制器设计过程2
• 第二步
z2 ' x2 ' 1 ' x3 f 2 x1, x2 1 ' z3 2 f 2 x1, x2 1 '
设计虚拟反馈 2 k2 z2 f 2 x1, x2 z1 1 '
则有 1 2 v2 v1 z2 , v2 ' v1 ' z2 z2 ' k1 z12 k 2 z22 z2 z3 2
控制器设计过程4
• 第n步
zn ' xn ' n 1 ' xn f n x1 ,..., xn n 1 ' zn u f n x1 ,..., xn n 1 ' u k z f x ,..., x z ' (真实控制率) n n n 1 1 n 1 n 1 n 1 n 1 1 2 vn v j z n 2 j 1 n 2 v ' k z jj n 1 j 1
backstepping介绍及其在主动悬架控制中的应用解析
李雅普诺夫函数
V1=½*z12 V2=V1+½*z22
…
Vn=∑( ½*zn2)
• 输出为 x1 ,希望输出跟踪0,定义跟踪误差
z1 x1 0 x1
1 2 • 构造李雅普诺夫函数v1 z1 0 ,则有 v1 ' z1z1 ' 2
• 由 z1 ' x1 ' x2 f1 x1 ,通过适当的反馈(虚拟)
256e-6路面不平度C级路面,10m/s车速
车身加速度:蓝色:backstepping控制,粉色:被动
悬架动挠度
正弦路面 车身加速度
悬架动挠度
车轮动变形
车身加速度
动挠度
车轮动变形
Backstepping介绍及其在主动 悬架控制中的应用
1、backstepping介绍
• Backstepping (反演,反步)是将 Lyapunov 函数的选取与控制器的设计相结 合的一种递归设计方法。它通过从系统的 最低阶次微分方程开始,引入虚拟控制的 概念,一步一步设计满足要求的虚拟控制, 最终设计出真正的控制律。
¼ 车辆主动悬架控制
非线性
主动悬架控制思路
• • • • • 1、建立动力学模型 2、选取控制目标(x1车身位移,x3车轮位移): (1)e=x1(车身加速度跟踪0) (2)e=x1-x31(x31时变非线性滤波后的车轮位移) (3)e=w1*x1+w2*x3(w1、w2分线性滤波和时变非 线性滤波) • 3、完成控制器设计 • 4、simulink仿真
控制器设计过程4
• 第n步
zn ' xn ' n 1 ' xn f n x1 ,..., xn n 1 ' zn u f n x1 ,..., xn n 1 ' u k z f x ,..., x z ' (真实控制率) n n n 1 1 n 1 n 1 n 1 n 1 1 2 vn v j z n 2 j 1 n 2 v ' k z jj n 1 ,k1 0 使系统达到稳定,
舰船混沌运动的改进自适应Backstepping控制

第42卷第4期2020年8月指挥控制与仿真CommandControl&SimulationVol 42㊀No 4Aug 2020文章编号:1673⁃3819(2020)04⁃0128⁃05舰船混沌运动的改进自适应Backstepping控制∗黄㊀谦,周红进,金㊀鑫,韩云东(海军大连舰艇学院,辽宁大连㊀116018)摘㊀要:针对舰船混沌运动控制中模型参数无法确知导致的控制结果不确定问题,将自适应控制方法与Backstepping方法相结合,在设计控制器时,引入参数估计误差补偿项,有效实现了系统参数的准确辨识,并得到了一种改进自适应Backstepping控制方法㊂实验结果表明,该方法能够实现对系统关键参数未知的舰船混沌运动的稳定有效控制,为舰船航向的高精度保持提供了一种有效途径㊂关键词:舰船混沌运动;未知参数;自适应控制;Backstepping方法中图分类号:U674 7㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2020.04.025ChaosControlofShipSteeringViaImprovedAdaptiveBacksteppingControlHUANGQian,ZHOUHong⁃jin,JINXin,HANYun⁃dong(DalianNavalAcademy,Dalian116018,China)Abstract:Tosolvetheproblemofuncertaincontrolresultscausedbytheuncertainparametersofthechaoticshipsteeringcontrolmodel,theadaptivecontroliscombinedwiththeBacksteppingmethod,andparameterestimationerrorcompensationisintroducedwhendesigningthecontroller.Asaresult,thesystemparameterscanbeeffectivelyandcorrectlyidentified,andanimprovedadaptiveBacksteppingcontrolmethodhasbeenconcluded.Ourexperimentalresultsdemonstratestableandeffectivecontrolofthechaoticshipsteeringwithunknownkeysystemparameters,provideaneffectiveapproachforhighac⁃curacycoursekeeping.Keywords:chaoticshipsteering;unknownparameters;adaptivecontrol;Backsteppingmethod㊀收稿日期:2019⁃11⁃13修回日期:2019⁃12⁃19∗基金项目:国家自然科学基金(6130392)作者简介:黄㊀谦(1980 ),男,福建福州人,博士,讲师,研究方向为舰船非线性运动及其控制㊂周红进(1978 ),男,博士,副教授㊂㊀㊀处于海上复杂环境中的舰船在航行过程中受到多种不同外力的扰动,不可避免会产生艏摇㊁横摇等运动㊂研究发现,舰船在海上航行过程中出现的非线性混沌运动是导致其不能实现高精度直航向航行的重要影响因素㊂这种混沌运动容易导致舰船偏离航向或失控,必须予以消除或转变为影响较小㊁较易控制的周期运动[1⁃2]㊂自1990年Ott等人提出混沌控制的OGY方法[3]起,各种混沌控制方法被陆续提出,例如,延迟反馈控制㊁PID控制㊁脉冲控制㊁自适应控制等[4⁃6],这些研究为舰船混沌运动的控制提供了良好的理论基础[7⁃8]㊂但由于混沌系统自身特点,目前,许多方法对复杂非线性混沌系统的控制往往不能达到令人满意的控制效果,对于参数未知或变化的舰船混沌运动更是如此㊂本文作者曾经探讨了一种舰船混沌运动的PID控制方法,实现了舰船混沌运动的稳定控制[9],但该方法的前提是确定的系统模型参数,一旦舰船混沌运动模型参数发生变化,原有PID控制器就可能无法实现对舰船混沌运动的有效控制㊂为了解决舰船混沌运动中的参数不确定性问题,本文在某型舰船转艏操纵运动非线性模型的基础上,将Lyapunov稳定性理论与Backstepping方法相结合,提出了一种改进自适应Backstepping混沌控制方法㊂该方法实现了将混沌系统状态变量控制到不动点上的目的,而且具有良好的参数辨识性能,对舰船混沌运动的控制具有重要价值㊂1㊀舰船混沌运动模型及问题描述研究表明,在实际舰船运动过程中,由于操舵伺服机构及舰船本身等多方面因素的影响,舵角和转艏角速度之间存在较大的非线性关系㊂为了使舰船模型更接近实际情况,Bech经过深入研究及合理假设,得到了适用于一般海上舰船的操纵运动非线性模型[9]㊂根据Bech非线性模型,本文作者在前期研究中,以保持直航向航行的海上舰船为研究对象,抓住舰船动态从舵角到舰船转艏角速度的主要环节,考虑舰船航行过程中的浪力等效舵角,并对舰船转艏角速度做比例反馈控制,得到舰船转艏操纵运动非线性响应的通用数学模型[10],如式(1)所示㊂x㊃1=x2x㊃2=ax2+bx1+cx31+dcosωt+esinωt{(1)其中,x=[x1,x2]TɪR2,x1ɪR分别为系统状态变量及输出量,x1是舰船转艏角速度,x2为舰船转艏角第4期指挥控制与仿真129㊀加速度;a㊁b㊁c㊁d㊁e为系统模型参数㊂相关的先期研究表明,当船的阻尼项系数和刚度项系数相差不是很大时,通过反馈增量的补偿,阻尼项系数和刚度项系数是同一数量级,在给定值较小的情况下,系统将进入非线性混沌状态,即舰船在航向保持过程中会出现混沌现象[10]㊂本文以某型舰船为研究对象,计算其相应参数得出该型舰船转艏操纵运动非线性响应模型如下:x㊃1=x2x㊃2=-0 3208x2+0 2715x1-4 3945x31+0 10368cos(0 8t)+0 0788sin(0 8t)ìîíïïïï(2)对该模型进行数值仿真实验,仿真步长取0 001s,系统初始值取(x10,x20)=(0 3,0 3),舰船初始航向090ʎ,仿真运行800s,绘制出系统相位图㊁系统庞加莱截面映射图和舰船航向时序图,如图1 3所示㊂图1㊀系统相位图图2㊀Poincaré截面映射图图3㊀舰船航向时序图从图1㊁图2可以看出,该型舰船的转艏操纵运动非线性响应模型具有典型的混沌系统特征㊂从图3可以发现,舰船在把定舵角为零的情况下,其航向无法保持在指定的初始航向090ʎ上,呈现典型的振荡㊂因此,必须对舰船转艏操纵运动中的混沌现象进行控制和消除,从而实现舰船的高精度航向保持㊂2㊀舰船混沌运动的改进自适应Backstepping控制㊀㊀大量的研究发现,一些非线性系统,如Duffing振荡㊁VanderPol振荡㊁Rössler系统等,可表示为如式(2)所示的非自治 严格反馈 系统[11⁃12]㊂x㊃i=gi( xi,t)xi+1+θTFi( xi,t)+fi( xi,t)㊀(i=1, ,n-1)x㊃n=gn( xn,t)u+θTFn( xn,t)+fn( xn,t)y=x1ìîíïïïïï(3)其中, xi=[x1,x2, ,xi]TɪRi,i=1, ,n,uɪR及yɪR分别是系统状态变量㊁输入量和输出量;θɪRp是未知常参数向量;gi(㊃)ʂ0,Fi(㊃),fi(㊃),i=1, ,n-1为已知光滑非线性函数;gn(㊃)ʂ0,Fn(㊃),fn(㊃)为已知连续非线性函数㊂通过运用Backstepping方法对控制器u进行设计,就可以实现非线性系统的控制或同步[11]㊂对于如式(1)所示的舰船转艏操纵运动非线性响应模型,其受控系统可写为如下形式x㊃1=x2x㊃2=u+ax2+bx1+cx31+dcos(ωt)+esin(ωt)y=x1ìîíïïïï(4)其中,x=[x1,x2]TɪR2,uɪR,yɪR分别为系统状态变量㊁控制输入量及输出量㊂对系统施加控制的目的是设计控制器u使得系统状态变量满足limtңɕx =0㊂将式(4)与式(3)所示的非自治 严格反馈 系统相比较,可得g1(x1,t)=1,F1(x1,t)=0,f1(x1,t)=0g2(x1,x2,t)=1,F2(x1,x2,t)=[x2x1x31cosωtsinωt],f2(x1,x2,t)=0θ=[θ1θ2θ3θ4θ5]T=[abcde]Tìîíïïïïïïïï(5)对于本文研究的舰船转艏操纵运动非线性响应模型,其混沌运动控制器设计步骤如下㊂第一步,定义误差变量:z1=x1z2=x2-a1{(6)130㊀黄㊀谦,等:舰船混沌运动的改进自适应Backstepping控制第42卷其中,a1为虚拟控制㊂利用自适应Backstepping方法设计控制器u㊂第二步,对z1进行求导,可得z㊃1=x㊃1=x2=z2+a1,取虚拟控制a1=-c1z1,c1为大于0的常数,则z㊃1=z2-c1z1(7)取Lyapunov函数V1=12z21(8)对V1求导,有V㊃1=z1z㊃1=z1z2-c1z21(9)第三步,令^a㊁^b㊁^c㊁^d㊁^e分别为不确定参数a㊁b㊁c㊁d㊁e的估计值,对z2进行求导,可得z㊃2=x㊃2-̇a1=^a(z2-c1z1)+^bz1+^cz31+^dcosωt+^esinωt+u+c1z㊃1-(^a-a)(z2-c1z1)-(^b-b)z1-(^c-c)z31-(^d-d)cosωt-(^e-e)sinωt(10)取Lyapunov函数V2=V1+12z22+12r-1(^a-a)2+12r-1(^b-b)2+12r-1(^c-c)2+12r-1(^d-d)2+12r-1(^e-e)2(11)其中,r为正常数,对V2求导,则有V㊃2=-c1z21+[z1+^a(z2-c1z1)+^bz1+^cz31+^dcosωt+^esinωt+c1z2-c21z1+u]z2+(^a-a)[r-1e^㊃-(z22-c1z1z2)]+(^b-b)(r-1b^㊃-z1z2)+(^c-c)(r-1c^㊃-z31z2)+(^d-d)(r-1d^㊃-z2cosωt)+(^e-e)(r-1e^㊃-z2sinωt)(12)第四步,为了保证V㊃2ɤ0,根据如式(13)所示的Backstepping方法控制器设计原则进行控制器设计:u=1gn(-cnzn-gn-1zn-1-^θTnthFns-fns)(13)取舰船混沌运动控制输入量u为u=-c2z2-z1-^az2-c1z2+c21z1+^ac1z1-㊀㊀^bz1-^cz31-^dcosωt-^esinωt(14)第五步,针对采用自适应Backstepping方法对系统模型参数辨识不准确的问题,本文在选取控制器参数自适应律时,引入参数估计误差补偿项,经改进的参数自适应律如下:a^㊃=r[(z22-c1z1z2)-l(^a-a)]b^㊃=r[z1z2-m(^b-b)]c^㊃=r[z31z2-n(^c-c)]d^㊃=rz2cosωte^㊃=rz2sinωtìîíïïïïïïïï(15)则V㊃2变为V㊃2=-c1z21-c2z22-l(^a-a)2-m(^b-b)2-n(^c-c)2ɤ0(16)显然,V㊃2负定,控制器u设计完毕㊂此时,按照本文提出的方法,可得到如下误差系统:z㊃1=z2-c1z1z㊃2=-c2z2-z1-(^a-a)(z2-c1z1)-(^b-b)z1-㊀(^c-c)z31-(^d-d)cosωt-(^e-e)sinωtìîíïïïï(17)结论:考虑混沌系统(4)㊁控制输入量(14)㊁误差系统(17)及参数自适应律(15),z=[z1,z2]T=0的平衡状态是全局一致稳定的,从而使得系统状态变量x=[x1,x2]T㊁控制输入量u以及参数估计值^θ(t)全局有界,进而有limtңɕx(t)=0(18)证明:对于误差系统(17)存在Lyapunov函数V,V=12z21+12z22+12r-1(^a-a)2+12r-1(^b-b)2+12r-1(^c-c)2+12r-1(^d-d)2+12r-1(^e-e)2(19)可知,V>0,对其进行求导,可得V㊃=-c1z21-c2z22-l(^a-a)2-m(^b-b)2-n(^c-c)2(20)易得V㊃ɤ0,即可证明误差系统(17)在z=[z1,z2]T=0的平衡状态是全局一致稳定的㊂由误差变量系统定义(6)及虚拟控制a1定义可知,系统状态变量x1,x2均有界,且当z1ң0,z2ң0时,有x1ң0,x2ң0,即limtңɕx(t)=0㊂根据V及V㊃可知,系统参数估计值^θ(t)是全局有界的㊂根据控制输入量u的定义(14),得出控制输入量也是有界的㊂证明完毕㊂通过从理论上对式(15)及系统(17)进行分析,采用改进的自适应Backstepping设计方法得到的控制器u和参数自适应律,能够使系统的运动轨迹收敛于使V㊃(x,t)=0的不变子集M,且当V㊃(x,t)=0时,^a-a=0㊁^b-b=0及^c-c=0成立,即实现了对系统不确定参数的准确辨识㊂3 仿真实验及分析为了验证本文设计的混沌控制器的控制效果,进行仿真实验,设定系统初值(z10,z20)=(0 2,0 2),^a0=0,^b0=0,^c0=0,^d0=0,^e0=0,c1=3,c2=2,r=1,l=100,m=100,n=100,舰船航向初始值为090ʎ,仿真步第4期指挥控制与仿真131㊀长0 001s,仿真时长50s,仿真实验结果及系统参数辨识结果如图4 8所示㊂图4㊀误差变量时序图图5㊀状态变量时序图图6㊀舰船航向时序图图7㊀控制作用u从图4㊁图5中可以看到,原混沌系统及误差系统在加入控制器u后都能被迅速稳定至(0,0),控制效果明显㊂图6中舰船航向在加入控制器u后迅速稳定在090ʎ,与图3中的混沌状态相比,明显得到了稳定控制㊂实验表明,在控制器u的作用下,舰船转艏操纵运动中的混沌状态得到了抑制,进一步验证了本文设计的控制器u的有效性㊂图7为所施加的自适应控制作用,其表明控制器的控制信号为连续有界信号㊂图8为系统参数辨识过程的收敛曲线,从图中可以看出,参数估计值^a㊁^b㊁^c㊁^d㊁^e分别收敛于^a=-0 3208㊁^b=0 2715㊁^c=-4 3945㊁^d=0 10368㊁^e=0 0788,辨识结果准确㊂实验表明,依据本文所提出的改进自适应Backstepping方法设计得到的控制器,不仅对关键参数未知的舰船混沌运动具有良好的控制效果,而且能够实现对系统参数的准确辨识,表明了本文所提方法具有良好的适用性和有效性㊂4㊀结束语对舰船转艏操纵运动而言,其非线性运动模型中各参数会随着舰船的航速㊁吃水㊁海水密度等影响因素的改变而变化,这导致了模型参数的不确定性㊂本文针对这一模型参数不确定问题,采用自适应控制技术132㊀黄㊀谦,等:舰船混沌运动的改进自适应Backstepping控制第42卷图8㊀系统参数辨识的收敛曲线实现对混沌运动的控制㊂为了克服采用一般自适应Backstepping方法进行舰船混沌运动控制器设计时存在的部分系统参数无法准确辨识的不足,在理论分析基础上,提出了一种基于改进自适应Backstepping的混沌控制方法㊂该方法可以实现对系统关键参数未知的舰船混沌运动的稳定有效控制,并做到对舰船混沌运动非线性响应模型中不确定参数的良好辨识,为舰船航向的高精度保持提供了一种可供参考和实现的有效途径㊂参考文献:[1]㊀黄迪山,刘献之,邵何锡.多自由度参数振动混沌控制方法研究[J].动力学与控制学报,2018,16(3):233⁃238.[2]㊀侯建军,常小勇,石爱国.舰船摇荡运动数据采集及混沌特性分析[J].船舶工程,2011,33(6):25⁃28.[3]㊀OttE,GrebogiC,YorkeJA.ControllingChaos[J].PhysicalReviewLetters,1990,64(11):1196-1199.[4]㊀陶思言,林达,曾晓辉.参数不确定统一混沌系统鲁棒最优控制[J].测控技术,2016,35(2):96⁃98.[5]㊀杨昌烨,陈艳峰,张波,等.基于参数扰动的混沌控制方案在Buck-Boost变换器中的应用研究[J].电源学报,2018,16(2):32⁃37.[6]㊀魏强.复杂系统的混沌控制和同步若干方法研究[D].大连:大连理工大学,2015.[7]㊀张显库,王坤飞.船舶横摇运动中的混沌及其非线性简捷控制[J].中国造船,2010,51(4):21⁃27.[8]㊀苏宁.混沌学与船舶运动控制[D].大连:大连海事大学,1996.[9]㊀黄谦,徐晓刚,李天伟,等.OceanInfo平台中舰船操纵运动控制研究[J].舰船科学技术,2016,38(6):63⁃66.[10]黄谦,李天伟,杨绍清.船舶混沌运动的周期脉冲参数微扰控制[J].控制理论与应用,2012,29(12):1603⁃1608.[11]GeS.S.,WangC.,LeeT.H.AdaptiveBacksteppingControlofaClassofChaoticSystems[J].BifurcationandChaos,2000,10(5):1149-1156.[12]魏剑林.基于Backstepping方法的混沌系统控制的研究与应用[D].泉州:华侨大学,2007.(责任编辑:张培培)。
控制方向未知的不确定系统预设性能自适应神经网络反演控制
控制方向未知的不确定系统预设性能自适应神经网络反演控制耿宝亮;胡云安【摘要】对一类控制方向未知的不确定严格反馈非线性系统的预设性能自适应神经网络反演控制问题进行了研究.系统中含有时变非匹配不确定项且控制方向未知.首先,提出了一种新的误差转化方法,放宽了对初始误差已知的限制;随后,利用径向基函数(radial basis function,RBF)神经网络及跟踪微分器分别实现了对未知函数和虚拟控制量导数的逼近,并综合运用Nussbaum函数和反演控制技术设计了控制器.所设计的控制器能保证系统内所有信号有界且输出误差满足预设的瞬态和稳态性能要求.最后的仿真研究验证了控制器设计方法的有效性.【期刊名称】《控制理论与应用》【年(卷),期】2014(031)003【总页数】7页(P397-403)【关键词】预设性能;神经网络;Nussbaum函数;反演【作者】耿宝亮;胡云安【作者单位】海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001【正文语种】中文【中图分类】TP273近年来,科研工作者对不确定非线性系统的稳定控制问题进行了大量的研究,最初系统的不确定性仅限于某些不确定的参数,研究成果包括自适应反馈线性化[1]、自适应反演[2]、控制Lyapunov函数[3]等;神经网络的出现使得更为复杂的不确定系统的稳定控制成为可能,神经网络由于其逼近特性而被用于对未知函数进行逼近,将神经网络与自适应技术相结合成为最近的一个研究热点[4–5].上述文献虽不要求控制增益精确已知,但是却要求控制方向已知,Nussbaum增益法[6]的出现为解决控制方向未知的不确定非线性系统的稳定控制问题提供了一条途径,将自适应技术与Nussbaum函数相结合也取得了一系列的研究成果[7–9].另外一个研究热点是系统的跟踪性能问题,包括稳态性能和瞬态性能两个方面.现有的控制方法大多将注意力放在系统稳态性能的研究上,即保证系统的跟踪误差收敛到一个有界的区域或渐近收敛到原点,而对系统的瞬态性能(包括超调量和收敛速度)缺乏系统的分析和设计工具.Bechlioulis等[10]提出了预设性能的概念,同时兼顾了系统的稳态和瞬态性能.所谓预设性能是指在保证跟踪误差收敛到一个预先设定的任意小的区域的同时,保证收敛速度及超调量满足预先设定的条件.文献[10]针对一类单输入单输出反馈线性化系统进行了预设性能控制器的设计,文献[11]将模型进一步推广到多输入多输出反馈线性化系统,文献[12–14]将预设性能的概念与输出反馈相结合,提出了一种预设性能输出反馈控制器的设计方法;但上述方法并不能简单推广到严格反馈系统,控制方向未知也使问题变得更为复杂,对于控制方向未知的严格反馈非线性系统的预设性能控制问题还没有发现相关报道,并且现有预设性能方法都要求初始跟踪误差已知,使预设性能控制的应用领域受到很大限制.针对上述问题,本文提出一种新的误差转化方法,放宽了对初始误差已知的限制,并针对一类具有非匹配不确定项且控制方向未知的严格反馈非线性系统进行研究,综合运用backstepping技术、Nussbaum增益、自适应控制技术和跟踪微分器解决了此类系统的预设性能控制问题.2.1 问题描述(Problem description)考虑如下具有一般形式的严格反馈非线性系统:其中:x=[x1x2...xn]T∈ℝn,u∈ℝ和y∈ℝ分别为系统的状态量、输入量和输出量;定义¯xi= [x1x2...xi]T∈ℝi,fi(.)和gi(.)为未知连续光滑函数,∆i(t,¯xi)为非匹配不确定项.控制目标如下:1)输出误差e(t)=y(t)−yr(t)满足预先设定的瞬态和稳态性能;2)闭环系统中的所有信号有界.对系统的基本假设[15]如下:假设1存在一个紧集Ω,使得x∈Ω.假设2函数gi(¯xi)及其符号未知,且存在未知正常数和使得0注1假设2表明光滑函数为严格正或严格负.假设3存在未知正常数和已知非负函数,使得假设4期望轨迹yr(t)及其高阶导数yir(t)(i= 1,2,...,n)均连续有界.2.2 性能函数(Performance function)定义1连续函数ρ∶ℝ+→ℝ+为性能函数,满足:1)ρ(t)是正的且严格递减;为满足控制目标(2),文献[10]在假设e(0)已知的情况下给出如下形式:显然,假设e(0)已知具有很大的局限性,在很多系统中是不满足的,本文给出一种变参数约束方案:其中光滑函数和α¯(t)满足下面的性质:且严格递减;注2上面的性质(2)表明,在初始误差e(0)未知的情况下,(0)ρ(0)<e(0)<−(0)ρ(0)始终满足,因此也就放宽了对初始误差已知的限制,本文选取和为如下形式:其中λ,γ,µ,ν为选取的正常数.性能函数选取为其中:ρ0,ρ∞,l>0为预先设定的常数,max{γ/λ, ν/µ}.ρ∞表示预先设定的稳态误差的上界,误差收敛速度及最大超调量可以通过系数λ,µ,l进行调节,上述过程可借助图1进行说明.2.3 误差转化(Error transformation)对于系统中存在形如式(2)的不等式约束的情况,直接处理的难度很大,为将其转化为等式约束,定义误差转化函数S(ε):其中:ε为转化误差,S(ε)满足下述性质:1)S(ε)光滑且严格递增;注3结合性质(2)和ρ(t)>0,得到S(ε)ρ(t)<(t),代入式(5)可得(t)ρ(t)<e(t)<α¯(t)ρ(t),式(2)所示的不等式约束得到满足.本文选取误差转化函数(如图2所示)为由误差转化函数的性质可知,S(ε)可逆(T= S−1),因此转化误差ε可表示为注4如果ε∈ℓ∞,∀t≥0,则不等式约束(2)满足,进一步,考虑到性能函数ρ(t)的衰减特性,对应的跟踪误差将被限制在以下区域:2.4 神经网络逼近(Neural approximation)假设系统中的不确定函数可表示为f(x),其中: x∈ℝn.对于自治型的不确定性,径向基函数(RBF)神经网络的逼近引理如下:引理1对于定义在紧子集Ω∈ℝn上的连续函数f∶Ω→ℝ,存在最优权值向量θ∗f∈ℝm和对应的高斯基函数φf(.)∶ℝn→ℝm,使得[16]其中:m为神经元节点数;x∈ℝn为神经网络的输入向量;ωf(x)为网络重构误差.且存在未知常数Wf>0,使得为解决增益函数及其符号未知的问题,引入Nussbaum增益法.Nussbaum函数的基本定义如下:定义2任意的连续函数N(.)∶ℝ→ℝ,称为Nussbaum函数,如果满足[6]显然,N(ζ)=ζ2cosζ是一个典型的Nussbaum函数,且具有如下的性质[17]:引理2设V(.)和N(.)为定义在[0,tf)上的连续函数,V(t)≥0,∀t∈[0,tf);如果N(.)满足[17]式中:c1,c0>0为适当的常数,g(x(τ))严格正或严格负,则V(t)及ζ(t)在[0,tf)上有界. Step 1对于模型(1)中的第1个子系统,选择虚拟状态量由式(6)可得转化误差ε1为式(9)两边对时间求导可得其中:为关于状态和参数的已知函数,选取Lyapunov函数为其中:=−为估计误差,为对未知参数的估计值.式(11)对时间求导并结合式(10)可以得到选择虚拟控制量x2d为其中=r1ε1η1,η1为待设计的光滑函数.将式(13)代入式(12)得其中z2=x2−x2d为虚拟状态量.结合式(7)–(8)以及假设3得到选择其中k1,nf1,nφ1,ng1,σ1>0.又有将式(15)–(17)代入式(14)得如果|z2(t)|≤Wz2,Wz2>0为未知常数,结合假设2,进一步得到其中:常数p1,q1>0,且定义为式(18)两侧同时乘以ep1t,得到在[0,t)上对式(19)积分,得到由引理2可得,ζ1,V1有界,进一步得到ε1和˜θf1有界.因此,问题转化为z2(t)的有界问题.Step 2对于模型(1)中的第2个子系统,虚拟状态量转化误差式(22)两边对时间求导,得到其中:为关于状态的已知函数.由于˙x2d非常难以计算,本文采用二阶非线性跟踪微分器对其进行光滑逼近.对于跟踪微分器的性能,作如下假设[18]:假设5合理设计跟踪微分器,可以使得跟踪微分器的输出和其输入信号x2d的微分之间的误差一致有界,即存在未知常数εx2d>0,使得|−注5假设5同样适用于其他子系统的设计过程,即存在常数Wxi,d>0,使得|˙xi,d−ˆ˙xi,d|≤Wxi,d,i=3,4,...,n.选取Lyapunov函数为其中:为估计误差,为对未知参数的估计值.式(24)对时间求导并结合式(23)可以得到选择虚拟控制量x3d为其中:˙ζ2=r2ε2η2,η2为待设计的光滑函数.将式(26)代入式(25)得其中z3=x3−x3d为虚拟状态量.结合式(7)–(8)以及假设3和假设5得到选择其中:k2,nf2,nφ2,ng2,nx2d,σ2>0.将式(29)代入式(28)得接下来的步骤与Step1中对应的过程类似,这里不再赘述,最终得到结合引理2可得,ζ2,V2有界,进一步得到ε2和˜θf2有界.采用递归的思想,得到Stepn对于模型(1)中的第n个子系统,选择虚拟状态量误差转化方程为选取Lyapunov函数为其中:=−为估计误差,为对未知参数的估计值.控制量u选择为其中:为待设计的光滑函数.选择最终得到ζn,Vn有界,进一步得到εn和有界.定理1对于式(1)所描述的控制方向未知的不确定严格反馈非线性系统,以假设1–5为前提,采用误差转化方程(33),设计控制器(35)–(36)和自适应律(37),可得到如下结论:1)输出信号y(t)跟踪期望信号yr(t)的同时,闭环系统中的所有信号有界;2)输出误差e(t)=y(t)−yr(t)满足预先设定的瞬态和稳态性能.平面上的双连杆机械手具有强非线性,其动力学方程可以写成如下形式:其中:二维向量q=(q1,q2)T表示关节角,二维力矩向量u=(u1,u2)T为机械手关节处的执行器输入,为机械手惯性矩阵,C(q)=为向心力和科氏力矩阵,G(q)=为重力矩,∆(q,˙q,t)为非匹配不确定项. 2由于上述模型是多输入多输出系统,令q2=˙q2= 0,将其转化为单输入单输出系统,参考信号设置为qr1(t)=π/2+π/6cos(t).具体参数设置为质量/kg:m1=3.2,m2=2.长度/m:l1=0.5,l2=0.4,r1=l1/2,r2=l2/2.转动惯量/(kg.m2):Iz1=0.96,Iz1=0.81.摩擦力系数/(N.m):km1=1,km2=1.性能函数参数:l=0.2,ρ0=1,ρ∞=5×10−3.初值:[q1(0)˙q1(0)]T=[80π/180 0]T.控制器参数:k1=1.0,k2=5.0,nf=1.0,nφ=3.0,ng=0.6,nx2d=5.0.引入二阶非线性跟踪微分器对x2d的导数进行光滑逼近,其数学表达式如下[19]: 其中设计跟踪微分器的参数为R=3.0,δ=0.1.用一个RBF神经网络对系统中的不确定函数进行逼近,选取25个节点,权值向量的初值设为零向量,仿真结果如图3–6所示.图3为跟踪误差随时间的变化情况(左图为整个时间区间的仿真情况,右图为最后10s的仿真情况),图中的点划线表示预先设定的上界和下界,其包围的区域便为跟踪误差的限制区域,可以看出,跟踪误差始终没有超出这个预设的区域,系统响应速度快,超调量小,稳态误差最终控制在5×10−3以内,因此满足文中所提到的预设性能的要求.图4为RBF神经网络的权值变化情况,可以看出25维的权值向量是收敛的,图5为RBF神经网络对未知函数的逼近情况,可以看出不论是逼近速度还是逼近精度都达到了很好的效果,图6为控制量u的变化情况,控制曲线连续平滑,而且幅值较小,易于工程实现.另外,在整个仿真过程中,系统的所有信号有界(限于篇幅,没有一一列出),充分验证了定理1的正确性.本文针对一类含非匹配不确定项及控制方向未知的严格反馈系统进行研究,提出了一种新的误差转化方法,将预设性能这种新型控制方式的应用对象进一步拓宽,并将其与backstepping技术、Nussbaum增益、自适应控制技术和跟踪微分器相结合,完成了控制器的设计,解决了此类系统的预设性能控制问题.耿宝亮(1984–),男,博士研究生,目前研究方向为智能控制、自适应控制等,E-mail:********************;【相关文献】[1]KANELLAKOPOULOS I,KOKOTOVIC P V,MARINO R.An extended direct scheme for robust adaptive nonlinear control[J].Automatica,1991,27(2):247–255.[2]KOJIC A,ANNASWAMY A M.Adaptive control of nonlinearly parameterized systems with a triangular structure[J].Automatica,2002, 38(1):115–123.[3]LIN Y,SONTAG E D.Control-Lyapunov universal formulas for restricted inputs[J].Control Theory and Advanced Technology,1995, 10(4):1981–2004.[4]CHEN F C,KHALIL H K.Adaptive control of nonlinear systems using neuralnetworks[J].International Journal of Control,1992, 55(6):1299–1317.[5]ROVITHAKIS G A.Stable adaptive neuro-control design via Lyapunov function derivative estimation[J].Automatica,2001,37(8): 1213–1221.[6]NUSSBAUM R D.Some remarks on the conjecture in parameter adaptivecontrol[J].Systems and Control Letters,1983,3(5):242–246.[7]YE X.Asymptotic regulation of time-varying uncertain nonlinear systems with unknown control directions[J].Automatica,1999, 35(5):929–935.[8]GE S S,WANG J.Robust adaptive neural control for a class of perturbed strict feedback nonlinear systems[J].IEEE Transactions on Neural Networks,2002,13(6):1409–1419.[9]GE S S,HONG F,LEE T H.Adaptive neural control of nonlinear time-delay systems with unknown virtual control coeff i cients[J]. IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2004,34(1):499–516.[10]BECHLIOULIS C P,ROVITHAKIS G A.Prescribed performance adaptive control of SISO feedback linearizable systems with disturbances[C]//The 16th Mediterranean Conference on Control and Automation.Ajaccio,France:IEEE,2008:1035–1040.[11]BECHLIOULIS C P,ROVITHAKIS G A.Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance[J].IEEE Transactions on Automatic Control,2008,53(9): 2090–2099.[12]KOSTARIGKA A K,ROVITHAKIS G A.Prescribed performance output feedback control:an approximate passivation approach[C] //The 18 th Mediterranean Conference on Control and Automation. Marrakech,Morocco:IEEE,2010:11–16.[13]KOSTARIGKA A K,ROVITHAKIS G A.Prescribed performance outputfeedback/observer-free robust adaptive control of uncertain systems using neural networks[J].IEEE Transactions on Systems, Man,and Cybernetics,PartB:Cybernetics,2011,41(6):1483–1494.[14]KOSTARIGKA A K,ROVITHAKIS G A.Adaptive dynamic output feedback neural network control of uncertain MIMO nonlinear systems with prescribed performance[J].IEEE Transactions on Neural Networks and Learning Systems,2012,23(1):138–149.[15]胡云安,晋玉强,李海燕.非线性系统鲁棒自适应反演控制[M].北京:电子工业出版社,2010. (HU Yun’an,JIN Yuqiang,LI Haiyan.Robustness of Adaptive Backstepping Control forNonlinear Systems[M].Beijing:Publishing House of Electronics Industry,2010.)[16]PARK J,SANDBERG I W.Universal approximation using radial basis function networks[J].Neural Computation,1991,3(2):246–257.[17]XU J X,YAN R.Iterative learning control design without a priori knowledge of the control direction[J].Automatica,2004,40(11): 1802–1809.[18]韩京清,王伟.非线性跟踪–—微分器[J].系统科学与数学,1994, 14(2):177–183. (HAN Jingqing,WANG Wei.Nonlinear tracking differentiator[J]. System Science and Mathematics,1994,14(2):177–183.)[19]李静,胡云安,耿宝亮.控制方向未知的二阶时变非线性系统自适应迭代学习控制[J].控制理论与应用,2012,29(6):730–740. (LI Jing,HU Yun’an,GENG Baoliang.Adaptive iterative learningcontrol for second-order time-varying nonlinear system with unknown control directions[J].Control Theory and Applications,2012, 29(6):730–740.)。
非线性系统Backstepping飞行控制律设计
=
)+g ( x ) +d ( , t )
1 = l
当 ,=0时 , ≤0 , 控制 器镇 定.
第i 步: 。 一O l ㈠, 仪 =一C i Z 一 一 1 构 造
引入下列 误差 迭代变 换
L y a p u n 。 v函数 = 一 。 + 1 2 并 求导
l
= 一
2
=
2 一
∑ 2 + 2 ; i Ⅲ
并求 导
=
n n
—
Ot n 1
一
当 + =0时 , ≤ 0, 控制器 镇定.
第 n步 : : 一 +
=
一
第一步: i= 1 , l
,
1 , 1 =一 C 1 z 1 ,构 造
L y a p u n 。 v函数 V z= 1 2 对 其 求导 = 1 ( 2+O L 1 ) =一C 1 z + 1 2 当 =0时 , ≤0 , 控制 器镇定 .
7 8
佳 木 斯 大 学 学 报 ( 自 然 科 学 版 ) 】= 2+d 1 ( , t )
正 2= 3+d 2 ( , t )
= 一 cI z — c 2 + Z 2 Z 3
2 0 1 3年
造L y a p u n o v函数 = + 1 2 并求 导
= 一
i a 1 0 9 3 0 +
适应 B a c k s t e p p i n g 控制 问题 在控制领域 中是非常
必 要 的.
W。 =
一 3 0 w + 等+ + —
一
/ 4 ‘ 1 9
本文提 出了一种 B a c k s t e p p i n g 飞行控 制律 的 设计方法 , 最终 的控制信号 u 通过一系列的虚拟信
不确定非线性系统的自适应pi控制研究

中文摘要摘要近年来,关于不确定非线性系统跟踪问题的研究与应用越来越受人关注。
在设计控制器时,假若忽略了非线性系统的不确定因素(可能包括未知参数、外界扰动,测量误差等等),很有可能带来不可估量的损失。
为此本论文基于结构简单、计算量小的神经网络自适应比例积分(PI)控制算法,研究不确定非线性系统的跟踪控制。
第一,针对一类非仿射非线性不确定系统,设计自适应PI控制算法。
由于系统模型具有非仿射和不确定性,即控制输入是以隐含的方式体现。
因此首要问题是将系统转换为仿射模型,这里利用的是中值定理;其次,利用神经网络函数的逼近性解决系统的非线性问题,同时引入虚拟参数简化分析过程;最后结合虚拟参数的估计误差和选取李雅普诺夫函数及合理的推导过程,表明所提方法能够保证闭环系统内的信号一致最终有界。
最后通过数值仿真分析,体现所设计的控制器具有良好的动态性能和稳态性能。
第二,针对一类带有执行器饱和的不确定非线性系统,设计自适应PI控制算法。
考虑到执行器具有非光滑的饱和结构,首先利用一种光滑函数逼近饱和函数;其次针对系统模型考虑的外部干扰、测量误差等不确定非线性项,利用神经网络函数的逼近性解决;然后基于巧妙选取李雅普诺夫函数及稳定性分析过程,证明所提方法能够保证闭环系统内的信号一致最终有界。
最后通过数值仿真分析,体现所设计的控制器与传统的PI算法相比,具有良好的动态性能和稳态性能。
第三,针对一类输入饱和的非线性系统,提出一种改进的自适应神经网络PI 控制算法。
在使用神经网络函数的逼近性能时,严格意义上必须保证神经网络的输入在一个紧集范围内,这里借助障碍李雅普诺夫函数的性质。
最后通过理论推导和数值仿真分析,均能体现所提方法的有效性和可行性。
关键词:不确定非线性系统,神经网络,自适应比例积分控制,一致最终有界I英文摘要ABSTRACTIn recent years, the tracking control problem for a class of complex and uncertain nonlinear dynamic systems have received a great deal of attention. It may be suffer great losses when the uncertainties are not considered in the control design for nonlinear systems. These uncertain factors include unknown parameters and external disturbance, measurement error, etc. In this work, we explore a low-cost proportional-integral (PI) tracking control solution for MIMO nonlinear systems, which are simplicity and intuitiveness in both structure and concept.For a class of MIMO nonaffine nonlinear systems, neural adaptive PI control with self-tuning gains is proposed. Because of the nonaffine and uncertain nature, the control input enters into and impacts on the behavior of nonaffine system through a completely uncertain and implicit way, making it nontrivial to design a reliable and cost-effective control scheme for such system. First, converting the original nonaffine system into an affine one by using the mean value theory. Second, using the neural network (NN) to approximate the resultant lumped nonlinearities and uncertainties in the system and introducing the concept of virtual parameter. Third, blending the virtual parameter estimation error into the skillfully chosen Lyapunov function to guide the derivation of the tracking control algorithms. It is shown that the proposed neuro-adaptive PI control ensures the uniformly ultimately boundedness of all the signals of the closed-loop system. The benefits and feasibility of the developed control are also confirmed by simulations.For a class of multi-input multi-output subject to unknown actuation characteristics and external disturbances., neural adaptive PI control with self-tuning gains is proposed. First, to facilitate the controller construction, a smooth function is used to approximate the saturation function. Second, using the neural network (NN) to approximate the resultant lumped nonlinearities and uncertainties in the system and introducing the concept of virtual parameter. Third, blending the virtual parameter estimation error into the skillfully chosen Lyapunov function to guide the derivation of the tracking control algorithms. It is shown that the proposed neuro-adaptive PI control ensures the uniformly ultimately boundedness of all the signals of the closed-loop system. The proposed PI control has better stability and transient performance.For a class of multi-input multi-output subject to unknown actuation characteristicsIIIand external disturbances., Motivated by the established PI control scheme with well explained analytical tuning algorithms. Now present a modified version to ensure the full functionality of the method. Note that to use NN for function approximation, the selected training input vector must remain in a compact set. To this end, we make use of the unique feature of barrier Lyapunov function (BLF) to develop strategies for confining/constraining the NN input. Stability analysis and simulation studies are performed to illustrate and verify the benefits and feasibility of the proposed method.Keywords:uncertain nonlinear dynamic systems, neural network, adaptive PI control, uniformly ultimately boundednessIV目录目录中文摘要 (I)英文摘要 (III)1 绪论 (1)1.1 课题研究背景及意义 (1)1.2 国内外研究现状 (2)1.2.1 自适应控制 (2)1.2.2 滑模与鲁棒控制 (3)1.2.3 神经网控制技术 (3)1.2.4 PID控制 (4)1.3 文章主要内容和安排 (5)2 预备知识 (9)2.1 数学基础知识 (9)2.2 信号分析基本定义及定理 (9)2.2.1 有界性定理 (10)2.2.2 障碍李雅普诺夫函数 (10)2.2.3 稳定性理论 (10)2.3 神经网络函数 (12)2.4 PI控制原理 (13)3 一类非仿射系统的自适应神经网络PI控制 (15)3.1 引言 (15)3.2 问题描述 (15)3.3 控制器设计及稳定性分析 (16)3.3.1 方系统下的PI控制设计 (17)3.3.2 非方系统下的PI控制设计 (19)3.4 仿真验证 (21)3.5 本章小结 (24)4 一类饱和非线性系统的自适应神经网络PI控制 (25)4.1 引言 (25)4.2 问题描述 (25)4.2.1 系统描述 (25)4.2.2 动态误差 (27)V4.3 控制器设计和稳定性分析 (29)4.3.1 方系统下的PI控制设计 (29)4.3.2 非方系统下的PI控制设计 (32)4.4 仿真验证 (34)4.5 本章小节 (38)5 一类基于BLF的非线性系统的自适应PI控制 (39)5.1 引言 (39)5.2 问题描述 (39)5.2.1 系统描述 (39)5.2.2 动态误差 (41)5.3 控制器设计与分析 (42)5.3.1 方系统下的PI控制设计 (43)5.3.2 非方系统下的PI控制设计 (46)5.4 仿真验证 (49)5.5 本章小结 (53)6 总结与展望 (55)6.1 总结 (55)6.2 展望 (56)致谢 (57)参考文献 (59)附录 (65)A. 攻读学位期间发表的论文目录 (65)B. 攻读学位期间获得的荣誉 (65)VI1 绪论1 绪论1.1 课题研究背景及意义非线性系统控制是复杂控制科学与控制理论界研究的重点和难点。
汽车主动悬架的自适应Backsetpping控制
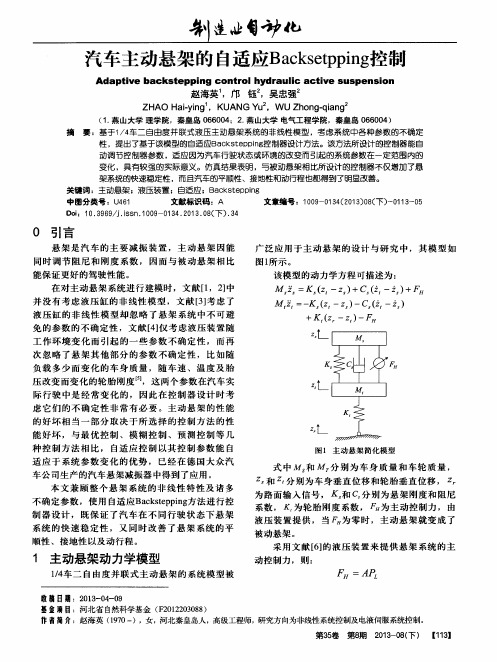
1 主动悬架 动力学模型
1 / 4 车 二 自由度 并 联 式 主 动悬 架 的 系统 模 型 被
收稿 日捌 :2 0 1 3 -0 4 - 0 9
基金项 目:河北 省 自然科学 基金 ( F 2 0 1 2 2 0 3 0 8 8 ) 作者简介 :赵海英 ( 1 9 7 0一 ),女 ,河北秦皇岛人 ,高级工程师,研究方向为非线性系统 控制及 电液伺服系统控制 。 第3 5 卷 第8 期 2 0 1 3 — 0 8 ( 下) [ 1 1 3 ]
适 应 于 系统 参 数 变 化 的优 势 , 已 经 在 德 国 大众 汽
图 1 主 动 悬 架 简化 模 型
车 公 司生产 的 汽车 悬架 减振 器 中得 到 了应用 。 本 文 兼 顾 整 个 悬 架 系 统 的 非 线 性 特 性 及 诸 多 不 确 定参 数 ,使 用 自适 应 B a c k s t e p p i n g 方法 进 行 控
l
=
訇 似
值 ,f =1,2 , …, 9 。下面 采 用 自适 应Ba c k s t e p p i n g 方 法逐 步进 行控制 器设 计 。
式 中 和 分 别 为 车 身 质 量 和 车 轮 质 量 ,
z 和z r 分 别 为 车身 垂 直位 移 和 轮胎 垂 直 位移 , z , 为 路 面输 入 信 号 , 和C 分 别为 悬 架 刚 度 和 阻尼 系数 , K 为 轮 胎 刚度 系数 , 为主 动 控 制 力 , 由
辛 |
M.
际 行 驶 中是 经 常 变 化 的 , 因此 在 控 制 器 设 计 时 考
虑 它 们 的 不 确 定 性 非 常 有 必 要 。主 动 悬 架 的 性 能 的好 坏 相 当 一 部 分 取 决 于 所 选择 的 控 制 方 法 的 性 能 好 坏 , 与最 优控 制 、 模 糊 控 制 、 预 测 控 制 等 几 种 控 制方 法 相 比 , 自适 应 控 制 以 其 控 制 参数 能 自
基于Backstepping的自适应模糊控制算法研究
基于Backstepping的自适应模糊控制算法研究王泰华;王坤非;姚学召【摘要】机器人是一种不确定性、非线性系统,为了实现不确定机器人系统的精确控制,基于Backstepping的自适应模糊控制算法,对直驱电机双关节机械臂进行了研究.首先,针对直驱技术双关节机械臂的数学模型,并结合Backstepping算法,对该系统进行相关数学理论分析;其次,详细介绍了Backstepping自适应模糊控制器的设计过程,并通过Lyapunov函数证明所设计控制系统闭环有界,且稳定可靠;最后,以Matlab软件组建该控制算法仿真平台,通过试验结果与单一自适应模糊控制算法比较分析表明,所设计控制器对关节1和关节2的位置跟踪响应时间大约分别为0.12 s和0.1 s,而且位置跟踪曲线更加精确.因此,该智能控制算法可以实现对不确定机器人系统位置的精确跟踪和快速响应,为解决高精度设备的轨迹跟踪问题提供了一定思路.所提出的直驱机械臂既节省资金,又具有很高的实用价值,值得推广和应用.%The robot is an uncertain and nonlinear system.In order to realize the precise control of the uncertain robot system,with the dual-joint manipulator which is composed of the direct drive motor as the object,the self-adaptive fuzzy control algorithm based on backstepping is studied.Firstly,in accordance with the mathematical model of the direct drive double-joint manipulator,and combining with the basis of backstepping algorithm,the relevant mathematical theory isanalyzed.Secondly,the design process of backstepping adaptive fuzzy controller is introduced in detail,and relying on Lyapunov function,to prove that the designed control system is closed-loop bounded and stable and reliable.Finally,the simulation platform is established by Matlabsoftware.The comparison between the experimental results and the single adaptive fuzzy control algorithm shows that the designed controller has about 0.12 s and 0.1 s respectively for the positional tracking response for joint 1 and joint 2,and the position tracking curve is moreaccurate.Therefore,this intelligent control algorithm can implement accurate tracking and fast response to the position of the uncertain robot system,and it provides a certain idea for solving the tracking of high precision equipment,and the proposed direct drive manipulator both saves money and provides high practical value,which is worth to be promoted and applied.【期刊名称】《自动化仪表》【年(卷),期】2017(038)009【总页数】4页(P36-39)【关键词】Backstepping;机器人;电机;自适应模糊控制;位置跟踪【作者】王泰华;王坤非;姚学召【作者单位】河南理工大学电气工程与自动化学院,河南焦作 454000;河南理工大学电气工程与自动化学院,河南焦作 454000;河南理工大学电气工程与自动化学院,河南焦作 454000【正文语种】中文【中图分类】TP241;TH113.2针对现阶段我国机器人行业缺乏核心技术及关键零部件问题,王延觉等人[1-2]提出直驱力矩电机替代传统“电动机+减速器”伺服系统[3]。
毕业设计(论文)-自适应反演滑模控制[管理资料]
![毕业设计(论文)-自适应反演滑模控制[管理资料]](https://img.taocdn.com/s3/m/be39fb98a98271fe900ef921.png)
摘要滑模变结构控制出现在20世纪中后期,由于变结构系统的滑动模态运动对系统的参数摄动、外界的扰动、不确定模态和模型不确定性具有自适应性,也就是完全鲁棒性,使得滑模控制引起了人们的极大关注。
反演(backstepping)是将复杂的非线性系统分解成不超过系统阶数的子系统,然后为每个子系统分别设计李雅普诺夫函数和中间虚拟控制量,一直后退到整个系统,直到完成整个控制律的设计。
本课题与李雅普诺夫型自适应律结合,综合考虑控制律和自适应律,使整个闭环系统满足期望的动静态性能指标。
在本论文中,将滑模变结构控制和基于backstepping设计方法的自适应控制有机结合,实现了以下技术指标:研究了Backstepping的基本思想和设计方法,并通过仿真实例进行验证。
设计出Backstepping滑模控制器。
设计出自适应Backstepping滑模控制器,使整个闭环系统满足期望的动静态性能指标。
通过MATLAB平台,对实例进行了仿真。
仿真结果表明:研究自适应反演滑模控制策略,为一大类不确定非线性系统提供了一种更有效的控制策略。
关键词:滑模变结构,反演控制器,自适应,李雅普诺夫函数Adaptive Backstepping Sliding Mode ControlABSTRACTThe sliding mode variable structure control was brought in the mid-and late 20th century. It is attention-getting because the sliding mode movement of variable structure system holds the adaptability, an ideal robustness, for the change of system parameters, outside disturbance, uncertain mode and model uncertainty of the system.Backstepping algorithm is designed to decompose a complicated nonlinear system to several subsystems with lower orders, and then a Lyapunov function and an interim virtual control variable are respectively designed for each subsystem. The steps of recursive algorithm will continue until the whole control law is worked out. In order to make the whole closed-loop system meet the anticipant stable and dynamic performance indexes, the subject is combined to Lyapunov’s adaptive law, and the control law and adaptive law are also taken into consideration.In this paper, the sliding mode variable structure control is properly combined to adaptive control based on backstepping design and the technical goals are realized as following.The basic ideal and designing method of backstepping are studied and proved through the simulation of practical examples.Backstepping sliding mode controller is developed.Adaptive backstepping sliding mode controller is designed to make the whole closed-loop system meet the anticipant stable and dynamic performance indexes.The simulation of practical examples is carried out on the platform of MATLAB. The simulation results show that the adaptive backstepping slidingmode provides a more efficient control strategy for a large class of uncertain nonlinear systems.Key words:sliding mode variable structure,backstepping controller,adaptive,Lyapunov function自适应反演滑模控制0 引言进入20世纪80年代以来,随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展,变结构控制理论和应用研究开始进入了一个新阶段。
不确定系统的自适应对偶控制方法

对偶控制方法适用于多变量系统,能够同时控制多个变量,并协调它们之间的关系。
适用于多变量系统
对偶控制方法通过将问题分解为较小的子问题,降低了计算复杂度,提高了计算效率。
优化计算效率
结合两种方法的优点
自适应对偶控制算法结合了自适应控制和对偶控制的优点,能够更好地应对系统的不确定性和复杂性。
优化参数调整
根据原系统和其对偶系统的性能指标,优化参数调整,使得对偶控制器的输出能够以最小的误差跟踪参考信号。
01
根据不确定系统的模型和性能指标,构建一个仿真模型,该模型能够模拟不确定系统的动态行为和性能。
构建仿真模型
02
根据优化参数调整的结果,设定仿真模型的参数,包括原系统和其对偶系统的参数、控制器的参数等。
讨论算法优缺点
01
02
03
06
CHAPTER
不确定系统自适应对偶控制的应用
总结词
重要、广泛、高效
详细描述
不确定系统的自适应对偶控制方法在工业控制领域有着广泛的应用。由于工业控制具有复杂性和不确定性,该控制方法能够有效地应对这些挑战。通过自适应对偶控制方法,可以精确地控制工业过程,提高生产效率。
1
2
3
虽然该自适应对偶控制方法在理论上进行了证明,但在实际应用中,还需要进一步考虑如何更好地实现该方法。
对于一些具有高度非线性和不确定性的系统,该方法可能还需要进一步改进和完善,以更好地适应这些系统的需求。
在未来的研究中,可以进一步探索该自适应对偶控制方法在其他领域中的应用,例如机器人控制、电力系统控制等。
对偶控制方法是一种将原系统转化为对偶系统的控制方法,通过对偶系统的优化控制实现对原系统的精确控制。
参数不确定混沌系统的自适应Backstepping控制解析

参数不确定混沌系统的自适应Backstepping控制
摘要:针对一个新的参数不确定混沌系统,提出基于误差补偿的自适应Backstepping控制方法.通过在每一步虚拟控制设计中增加一个误差补偿项,补偿未知误差动态对系统的影响,获得更加平稳的混沌镇定过程,并提高参数辨识的速度.同时,基于Lyapunov定理给出严格的理论推导,证明混沌控制系统中所有信号的一致有界性.对比仿真结果表明,该方法具有更好的瞬时响应.
关键词:不确定混沌系统;参数辨识;自适应控制;
Backstepping设计自20世纪60年代Lorenz[1]发现第一个混沌吸引子以来,许多实际系统中都发现了混沌现象.由于混沌具有初值敏感和长期不可预测的特点,混沌控制的研究就显得至关重要.自1990年OGY方法[2]被提出以后,出现了各种各样的混沌控制方法,例如微分几何法[3-4]、反馈控制方法[5]、自适应方法[6]、状态观测器方法[7]以及逆控制方法[8]等.但这些控制方法对于复杂的未知非线性动态系统难以达到满意的控制效果.自适应Backstepping方法[9]作为一种自适应非线性控制方法,能够保证系统的全局稳定性和良好的控制性能.近来,Backstepping控制方法被应用于混沌系统的控制中[10-11].但上述文献中考虑的混沌系统参数需完全已知或部分未知,适用范围有限,且参数辨识在控制器设计之前进行.因此,作者将设计参数辨识和控制可同时在线运行的控制方法.2007年,Cai等[12]基于电路系统提出新的参数完全未知的不确定混沌系统,目前对此系统的研究还较少,该文献中虽然给出了一般Backstepping控制方法,但由于未知误差动态的影响,混沌镇定和参数辨识过程中存在一定振荡,影响实际应用.针对上述不足,作者设计一种基于误差补偿的自适应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
封 希媛 等 : 不确 定 的 L u系统 的 自适应 B a c k s t e p p i n g控 制
r =0 ( y一 )
4 6 7
{ =( c 一 0 ) 一 + c y ,
【 z = x y一 次 当参数 值 为 a= 3 5 , b= 3 , C = 2 8时 , C h e n系统 有 一 个混 沌 吸 引 子 。文献 [ 3— 4 ] 发 现 了一 个新 的混 沌 吸引子 , 它 连接 了著 名 的 L o r e n z 吸引 子和 C h e n吸引子 , 它 的数 学模 型为
摘
要: 混沌反 控制模 型 L n系统连 接 了著名 的 L o r e n z系统和 C h e n系统 , 并代 表 了它们之 间 的连
续演 变。针对 混 沌 系统 的控制 问题 , 已有很 多控 制 方 法 。本 文是 针 对 L n系统 参 数 未知 情 形 , 研 究 了混 沌控制在 L n系统 中的 问题 , 并将 L n系统转换 成 一种 非线 性 的一般 严 格反馈 形式 , 利用 自
J u 1 . 2 0 1 3
文章编号 : 1 6 7 2— 9 3 1 5 ( 2 0 1 3 ) 0 4— 46 0 6— 4 0
不确 定 的 L i i 系统 的 自适 应 B a c k s t e p p i n g 控 制
封希媛 , 李 医民
( 1 . 青海 民族大学 计算机学 院, 青海 西 宁 8 1 0 0 0 7 ; 2 . 江苏大学 理学 院, 江苏 镇江 2 1 2 0 1 3 )
收 稿 日期 : 2 0 1 3— 0 5—1 0
基金项 目: 国家 自然科学基金项 目( 1 1 0 7 2 0 9 0 ) 通讯作者 : 封希嫒 ( 1 9 6 5一) , 女, 河南洛阳人 , 硕士 , 教授 , 主要从 事高等数学 、 离散数学与概率论与数理统计 的教学工作
第 4期
控 制器 , 通过 应用 此种 B a c k s t e p p i n g 设计 程序设 计 出 的控 制器 , 使 该 闭环系 统全局稳 定 。
1 L o r e n z混沌 系统介绍
巨 x = a ( y - x )
当参 数值 为 a= 1 0 , b = 8 / 3 , C = 2 8时 , L o r e n z 系统有 一个 混 沌 吸引 子 。文献 [ 2 ] 发 现 了N ̄ b - 个混 沌
第3 3 卷 第4 期
2 0 1 3年 0 7月
西
安科ຫໍສະໝຸດ 技大 学 学报
Vo 1 . 3 3 No . 4
J OU R N AL OF X I ’ A N U MⅦ R S nY O F S C I E N C E AN D T E C HN0 I J 0 GY
适应 B a c k s t e p p i n g 设计方法, 针对 L n系统的三个未知参数 , 结合 L i i 系统 的特性设计 出一种新的
自适应控 制 器 , 保证 闭环 系统 全局稳 定 , 仿 真 结果表 明 了该 方 法的可行性 和有 效性 。
关 键词 : L i i系统 ; B a c k s t e p p i n g方 法 ; 自适应
中图分 类号 : T P 2 7 3
文献标 志码 : A
0 引 言
E N L o r e n z 在 一个 自治 的三维 系 统 中发 现 了第 一 个混 沌 吸引 子—— L o r e n z 系 统 , 最 近 几十 年混 沌 得到 了广泛 的研究 J 。混 沌控 制 的研 究 有 许 多方 法 , 如 O G Y方 法 J , 线 形 状 态空 间反 馈法 J , 微 分 几 何学法 , 自适 应控 制 ] 、 状 态 观测器 方法 J 、 以及 逆控 制 方 法 _ 1 。 。 但 这 些 控 制方 法 对 于 复杂 的未 知非 线 性动态 系统 难 以达到满 意 的控制效 果 , 自适应 B a c k s t e p p i n g 方 法作 为一种 自适应 非线 性控 制 方法 , 能够 保 证 系统 的全 局稳 定性 和 良好 的控 制 性 能 。B a c k s t e p p i n g方 法 已成 为非 线 性 自适 应 控 制有 效 方 法 , 并 已演 示 了许 多 著名 的混沌 学系 统作 为研 究 混 沌 的典 型样 式 , 包括 D u f f i n g振子 1 1 ] , V a n d e r P 0 l 振 子 1 2 ] , R 6 s l e r 系统 和 L o r e n z 系统 , 自适应 B a c k s t e p p i n g 也 已被 应用 并延伸 到 了这 些混 沌 系统 的控 制 当中 。考虑 到转 换成 一般 严格反 馈形 式 的 L n系统并 不能 直 接应 用 B a c k s t e p p i n g方 法来 研 究它 的特殊 问题 。作 为一 种设 计工 具 , B a c k s t e p p i n g比其 它一般方 法受 到更 少 的约束 。针对 未 知误差 动 态 的影 响 , 混 沌镇 定 和参 数 辨识 过程 中存 在一定 振荡 , 影 响实 际应用 。文献 [ 1 4 ] 设计 一种 基于误 差补偿 的 自适应 B a c k s t e p p i n g 控 制方法 , 通 过在每 一步 虚拟控 制设 计 中增 加 误差 补偿 项 , 抵 消混 沌 镇 定 和参 数辨 识 中未 知误 差 动态 的影 响 , 构建
新的控制器结构和参数辨识规律 , 并提高参数辨识速度 。文献 [ 1 5 ] 同时考虑系统参数 由于 内部噪声等未 知 扰动 的影 响而在 有界范 围 内波动 的情况 , 研 究 了含 参数 扰 动 混沌 系 统 的控 制 问题 。本 文 考 虑到 L n系
统 参数未 知 , 将 B a c k s t e p p i n g控制方 法与 自适应 机制 进 行有 机 的结 合 , 即在 L n系 统 的第 三个 方 程 中引 进