灰度图像的二值化自适应阈值的算法
OpenCV-C++图像自适应阈值二值化处理adaptiveThreshold

OpenCV-C++图像⾃适应阈值⼆值化处理adaptiveThreshold API介绍这篇⽂章主要介绍有关adaptiveThreshold的使⽤⽅式;⾸先,来看⼀下调⽤格式;void adaptiveThreshold( InputArray src, OutputArray dst,double maxValue, int adaptiveMethod,int thresholdType, int blockSize, double C );src表⽰需要进⾏⼆值化的图像;需要注意的是,该输⼊必须是8-bit单通道的图像;dst表⽰输出图像的⼆值图像;maxValue是⼀个⾮零值,⽤于对哪些满⾜条件的阈值进⾏赋值;adaptiveMethod表⽰选择哪⼀种⾃适应阈值算法;Opencv提供两种,ADAPTIVE_THRESH_MEAN_C与ADAPTIVE_THRESH_GAUSSIAN_C,下⾯会详细介绍;thresholdType表⽰⼆值化类型,OpenCV提供两种, THRESH_BINARY与THRESH_BINARY_INV,下⾯会详细介绍;blocksize表⽰参与计算的像素的领域范围,必须使⽤奇数;C可以为正数, 零或者负数;⽤于在计算过程中容忍程度;thresholdType介绍OpenCV在adaptiveThreshold⽅法中允许使⽤两种ThresholdTypes,毕竟是进⾏⼆值化处理;分别为:THRESH_BINARYTHRESH_BINARY_INV计算⽅式如下:其中,\(src(x, y)\)表⽰原始灰度图像灰度值,\(T(x, y)\)是根据⾃适应阈值算法计算得到;计算的⽅式来⾃于adaptiveMethod; adaptiveMethod介绍OpenCV提供两种⾃适应阈值算法:ADAPTIVE_THRESH_MEAN_CADAPTIVE_THRESH_GAUSSIAN_C其中,第⼀种ADAPTIVE_THRESH_MEAN_C,针对像素\((x, y)\)的计算⽅式如下:\(T(x, y)\)结果是在\((x, y)\)的邻域\(blockSize \times blockSize\)范围内所有灰度值的均值减去\(C\);第⼆种ADAPTIVE_THRESH_GAUSSIAN_C,针对像素\((x, y)\)的计算⽅式如下:⾸先,⽣成⼀个⼤⼩为\(blockSize \times blockSize\)的⾼斯核,作为权重;其次,利⽤⾼斯核与\((x, y)\)邻域范围内灰度值,进⾏加权求和,再减去\(C\),得到\(T(x, y)\);⽰例:#include <iostream>#include <opencv2/opencv.hpp>using namespace std;using namespace cv;/*** adaptiveThreshold的使⽤*/int main(){// 读取图像Mat src = imread("/home/chen/dataset/lena.jpg");if (! src.data){cout << "could not load image." << endl;return -1;}namedWindow("src", WINDOW_AUTOSIZE);imshow("src", src);// 转成灰度图Mat srcGray;cvtColor(src, srcGray, COLOR_BGR2GRAY);namedWindow("srcGray", WINDOW_AUTOSIZE);imshow("srcGray", srcGray);// ⾃适应阈值⼆值化Mat srcBinary;adaptiveThreshold(~srcGray, srcBinary, 255, ADAPTIVE_THRESH_MEAN_C, THRESH_BINARY, 11, -2); namedWindow("srcBinary", WINDOW_AUTOSIZE);imshow("srcBinary", srcBinary);waitKey(0);return 0;}。
大津二值化算法

大津二值化算法大津二值化算法(Otsu's method)是一种自适应二值化算法,它是由日本学者大津展之于1979年在日本出版的论文《A Threshold Selection Method from Gray-Level Histograms》中提出的。
算法原理是通过计算图像直方图,尝试找到一个阈值,使得将图像分成前景和背景两部分后,前景和背景之间的方差最小。
找到这个阈值后,将灰度值大于该阈值的像素设为前景,灰度值小于该阈值的像素设为背景。
具体的实现步骤是:1. 统计图像的灰度直方图,即将图像中每个灰度级别的像素的数量记录下来,得到一个长度为256的数组hist。
2. 计算累计直方图函数cumSum,其中cumSum[i]表示灰度值小于等于i的像素的数量之和。
3. 计算每个灰度级别i的像素在前景和背景两个类别中的像素数目分别为n1[i]和n2[i]:n1[i] = cumSum[i]n2[i] = sum(hist) - cumSum[i]4. 计算前景和背景的平均灰度值分别为mean1[i]和mean2[i]:mean1[i] = (cumSum[i]*i)/n1[i]mean2[i] = ((sum(hist)-cumSum[i])*i)/n2[i]5. 计算前景和背景之间的方差(类间方差):variance[i] = (n1[i]*n2[i])*(mean1[i]-mean2[i])*(mean1[i]-mean2[i])6. 找到使得类间方差最小的阈值,即variance数组中的最大值对应的灰度级别就是最佳阈值。
7. 根据最佳阈值,将灰度值大于该阈值的像素设为前景,灰度值小于该阈值的像素设为背景,得到二值化图像。
优点:自适应性很强,可以适用于各种不同光照下的图像。
缺点:如果图像中的前景和背景类别分布非常不均衡,则可能找不到合适的阈值,导致二值化效果不理想。
比较了软阈值硬阈值及当今各种阈值计算方法和阈值函数处理方法的性能
比较了软阈值硬阈值及当今各种阈值计算方法和阈值函数处理方法的性能阈值是图像处理中常用的技术,用于将图像中的灰度值进行二值化处理。
在二值化处理中,大多数像素点的灰度值被映射为0或255,从而实现图像的分割和提取。
常见的阈值处理方法包括软阈值和硬阈值,它们各有优势和适用范围。
软阈值是基于灰度值进行映射的一种阈值处理方法,其基本原理是将灰度值大于一些阈值的像素点映射为255,灰度值小于等于阈值的像素点则设置为0。
软阈值处理可以保留图像中较为细致的细节信息,对于图像中明暗度变化较大的区域有较好的效果。
然而,软阈值处理对于一些图像中灰度值变化较均匀的区域可能会产生较差的效果。
硬阈值是将灰度值进行二分,将大于阈值的像素点设置为255,小于阈值的像素点设置为0。
硬阈值处理简单直接,并且对于图像中明暗度变化较大的区域有较好的效果。
然而,硬阈值处理会丢失一些细节信息,对于灰度值变化较均匀的区域效果较差。
除了软阈值和硬阈值外,还存在各种其他的阈值计算方法和阈值函数处理方法,这些方法根据问题的特点和应用的需求选择不同的阈值处理策略。
常见的阈值计算方法包括固定阈值、自适应阈值和动态阈值。
固定阈值是指将阈值设为一个固定的值,不考虑图像中各个像素点的灰度分布情况。
自适应阈值是根据图像中每个像素点的局部灰度特征来自适应地计算阈值。
动态阈值是根据图像中的灰度分布情况和统计特征来动态地计算阈值。
常见的阈值函数处理方法包括基于统计特征的阈值函数、基于能量特征的阈值函数和基于梯度特征的阈值函数。
基于统计特征的阈值函数是根据图像中的灰度统计特征来确定阈值的处理方法。
基于能量特征的阈值函数是根据图像中像素点的能量特征来确定阈值的处理方法。
基于梯度特征的阈值函数是根据图像中像素点的梯度特征来确定阈值的处理方法。
不同的阈值计算方法和阈值函数处理方法在不同的图像处理任务中具有不同的优势和适用范围。
在实际应用中,根据问题的特点和需求选择合适的阈值处理方法是很重要的。
医学影像处理中的自适应阈值分割算法

医学影像处理中的自适应阈值分割算法医学影像处理在现代医学应用中扮演着极为重要的角色。
随着计算机技术和数字图像处理技术的不断发展,医学影像处理技术也越发成熟,被广泛应用于医学诊断、疾病研究、医疗检测等方面。
医学图像的自动分割技术是医疗影像处理的重要内容之一。
其中,自适应阈值分割算法是一种基于图像直方图分析的图像分析和处理方法,因其能够适应灰度分布不均匀的图像,也就成为医学影像分割领域中应用广泛的技术。
随着医疗影像学技术的发展,医学影像数据的数量以及复杂度也在不断增加,因此如何快速、自动、准确地对医学影像进行分割成为了医学影像处理领域需要解决的难题。
自适应阈值分割算法是一种能够有效解决医学影像非均匀性分布问题的自动分割方法。
该方法将图像处理为灰度直方图,并据此选取合适的阈值进行图像分割。
由于该算法的计算量较小,并且不依赖于特定的二值化阈值,因此在处理医学影像数据中表现出良好的稳定性,从而得到了广泛的应用。
自适应阈值分割算法主要包括基于灰度值的区域分割和基于边界线的区域分割两种方法。
其中,基于灰度值的区域分割通常将图像分成若干个区域,然后对每个区域选取适当的阈值进行分割;而基于边界线的区域分割,则是在灰度图像的边缘区域内使用自适应阈值分配算法,根据图像边缘的特点进行分割。
近年来,随着深度学习技术的广泛应用,医学影像领域也开始探索使用深度学习来进行自动分割和诊断。
有许多研究表明,使用深度学习技术相对于传统的自适应阈值分割算法能够取得更好的分割效果。
然而,深度学习要求有足够的数据进行训练,这在医学影像处理中并不容易实现。
因此,在实际应用中,自适应阈值分割算法仍然是医学图像处理中广泛应用的一种算法,它具有较好的适应性和实时性,能够高效地分割医学影像。
总而言之,自适应阈值分割算法是医学影像处理领域中常用的自动分割技术之一。
它具有简单、快速、适应性强等优点,可以广泛应用于医学影像的分割和诊断。
在不断发展的医学影像处理领域,随着深度学习技术的不断进步,自适应阈值分割算法的一些缺点也将逐渐被克服,使其能够更好地服务于人类的健康事业。
halcon阈值

halcon阈值Halcon是一种高级的计算机视觉软件,常常用于图像处理和机器视觉领域中。
Halcon阈值也称为二值化,是对图像进行处理的一种方法。
在计算机视觉中,阈值是一种重要的方法,它用于将灰度图像转换为二值图像或分割图像。
在本文中,我们将介绍Halcon阈值的用途和如何使用它进行图像处理。
Halcon阈值的定义Halcon阈值是指将一种灰度图像转换为二值图像的操作。
在进行二值图像处理时,我们可以使用一些阈值来划分图像中的不同区域。
具体来说,我们将灰度图像像素值确定为阈值以上还是阈值以下。
阈值可以是任何值,但是通常使用用户可以指定的固定值。
步骤一:图像加载在进行Halcon阈值处理之前,我们需要先加载要处理的图像。
在Halcon软件中,使用read_image函数可以加载图像。
例如:read_image(Image, 'input_image.tif')步骤二:阈值处理Halcon提供了多种阈值处理方法,包括全局阈值和局部阈值。
全局阈值使用一个固定值来划分图像中的像素为黑色或白色。
局部阈值根据图像中不同区域的像素值进行阈值分割。
以下是一些常见的阈值处理方法:1. 二值化处理:最简单的方法是使用threshold函数,将灰度图像转换为二值图像。
threshold(Image, BinaryImage, 128, 255)其中,第一个参数是输入灰度图像,第二个参数是输出的二值图像,第三个参数是阈值下限,第四个参数是阈值上限。
该函数将大于或等于阈值的像素设置为白色(255),小于阈值的像素设置为黑色(0)。
2. 局部阈值处理:Halcon也提供了基于局部像素值的阈值处理方法,例如adaptive_threshold和select_threshold函数。
这些方法在灰度图像的不同区域使用不同的阈值。
3. 自适应阈值。
Halcon阈值还可以使用自适应阈值处理来改善处理效果,方法是计算每个像素的邻域平均值,并使用该值作为该像素的阈值。
灰度梯度自适应阈值二值化算法的FPGA实现

第 3 卷 第 9期 8
20 0 8年 9月
激 光 与 红 外
I SER & I A NFRARED
Vo. 8, 1 3 No. 9 S pe e t mbe 20 8 r, 0
文章编号: 0— 7 (080- 5- 1 1 0820 )9 98 3 0 5 0 0
Ab t a t Ad p i et r s od b n r ain o f r d i g a e nt e c a a t r t f r ys ae g a sb t e n tr s r c : a t h e h l ia i t f nr e v z o i a ma eb s d o h h r ce i i o e c l r d e w e - sc g a g t n a k o n sp o o e n t i a e . i p p ras nr d c d ad s n t c iv h e to y u ig e d b c g u d i r p s d i h sp p r Ths a e o i t u e e i o a h e e t en w meh d b sn a r l o g mo u a z t n meh d a d c aa trs c o aal ld a d pp l e o P A. h sd s n c n an wo mo ue : e d lr a i t o n h ce t fp l ee n i ei fF G T i e i o t is t d ls g y i o r i i r n g r s ae b n r ain mo u e a d a a t e t r s o d T mo u e T ef r rc ris o t t a ie c mp tt n o ia z — c i a z t d l n d p i e h l d l . h o me are u r ml o u ai f n r a l i o v h se n o b i t n wi y c r n u i n s T e b n rzto s b s d o h a g fg e c e g a swhc s as a r d o tb i t s n h o o s s a . h ia iai n i a e n t e r n e o y s a d ih i l o c ri u y o h gl r l r e
图像处理中的图像二值化算法

图像处理中的图像二值化算法随着科技的发展,图像处理技术应用越来越广泛。
作为一项基础技术,图像二值化算法在图像处理中扮演着非常关键的角色,它可以将图像分割成黑白两种颜色,也就是将图像中的灰度值转化为0和1,简化了后续的处理流程。
本文将介绍图像二值化算法的基本原理和应用情况。
一、二值化算法的基本原理在图像中,每个像素都有一定的灰度值,在8位灰度图像中,灰度值的范围在0-255之间,其中0是代表黑色,255代表白色。
当我们需要处理一张图片时,如果直接对每一个灰度值进行处理,那么处理的过程就会非常繁琐,因此,我们需要将图像灰度值转化为0和1两种数字进行处理。
常见的二值化算法有全局阈值算法、局部阈值算法、自适应阈值算法、基于梯度算法等。
其中,全局阈值算法是最基本、最简单的一种算法。
它将整张图像分成黑白两个部分,通过将整个图像的像素点的灰度值与一个固定的阈值进行比较,如果像素点的灰度值大于阈值,就将该像素点的灰度值置为1,否则置为0。
使用全局二值化算法的步骤如下:1.将图像读入到内存中;2.将图像转化为灰度图像;3.计算整个图像的平均灰度值,该平均灰度值作为全局阈值;4.将图像中每个像素点的灰度值与该全局阈值进行比较,灰度值大于等于该全局阈值的像素点赋值为255(代表白色),小于该阈值的像素点赋值为0(代表黑色);5.输出处理后的图像。
当然,这种方法的缺点也非常明显,那就是无法适应不同场合下的图像处理需求,处理效果难以保证。
因此,我们需要更为灵活的算法和方法来进行二值化处理。
二、不同类型的二值化算法1.基于直方图的全局阈值法二值化算法中的全局阈值算法通常是将整个图像分成两类像素:一类像素比较暗,另一类像素比较亮。
在直方图中,该分割就是直方图上的两个峰。
我们可以通过直方图分析来确定这个阈值,并将灰度值低于阈值的像素变为黑色,将灰度值高于阈值的像素变为白色。
对于图像I(x,y),它的灰度直方图h(i)可以表示为:h(i) = N(i) / MN (i=0,1,…,L-1)其中N(i)是图像中所有像素灰度值为i的像素数量,MN是总的像素数量,L是灰度级别数量(在8位图像中,L等于256)然后我们需要确定一个阈值T,所有像素点的灰度值小于T的变为黑色,大于等于T的变为白色。
【数字图像处理】灰度图像二值化

【数字图像处理】灰度图像⼆值化灰度图像每副图像的每个像素对应⼆维空间中⼀个特定的位置,并且有⼀个或者多个与那个点相关的采样值组成数值。
灰度图像,也称为灰阶图像,图像中每个像素可以由0(⿊)到255(⽩)的亮度值(Intensity)表⽰。
0-255之间表⽰不同的灰度级。
灰度图像⼆值化⼆值化:以⼀个值(阈值)为基准,⼤于(等于)这个值的数全部变为是1(或者0),⼩于等于这个数的就全部将他们变为0(或1)。
⼆值化算法处理飞思卡尔赛道思路:设定⼀个阈值valve,对于图像矩阵中的每⼀⾏,从左⾄右⽐较各像素值和阈值的⼤⼩,若像素值⼤于或等于阈值,则判定该像素对应的是⽩⾊赛道;反之,则判定对应的是⿊⾊的⽬标引导线。
记下第⼀次和最后⼀次出现像素值⼩于阈值时的像素点的列号,算出两者的平均值,以此作为该⾏上⽬标引导线的位置。
摄像头的⼆值化的代码:Void image_binaryzation(){for(int i=0;i{for(int j=0;j{if(Image[i][j] >= Threshold)Image_new[i][j]=1;elseImage_new[i][j]=0;}}}Row是对应采集到的⾏数,Col是列数,Image[i][j]是摄像头采集未⼆值化的数据存放的数组,Img[i][j]是新建的存放⼆值化后的数组。
合适的阈值在阈值⼆值化中,最主要的是选取合适的阈值,这也是⼆值化的难点所在。
常⽤的⼆值化阈值选取⽅法有双峰法、p参数法、⼤律法(Otsu法)、最⼤熵阈值法、迭代法等。
⼤律法(Otsu法)Otsu⽅法⼜名最⼤类间差⽅法,通过统计整个图像的直⽅图特性来实现全局阈值T的⾃动选取,其算法步骤为:1) 先计算图像的直⽅图,即将图像所有的像素点按照0~255共256个bin,统计落在每个bin的像素点数量2) 归⼀化直⽅图,也即将每个bin中像素点数量除以总的像素点3) i表⽰分类的阈值,也即⼀个灰度级,从0开始迭代4) 通过归⼀化的直⽅图,统计0~i 灰度级的像素(假设像素值在此范围的像素叫做前景像素) 所占整幅图像的⽐例w0,并统计前景像素的平均灰度u0;统计i~255灰度级的像素(假设像素值在此范围的像素叫做背景像素) 所占整幅图像的⽐例w1,并统计背5) 计算前景像素和背景像素的⽅差 g = w0*w1*(u0-u1) (u0-u1)6) i++;转到4),直到i为256时结束迭代7)将最⼤g相应的i值作为图像的全局阈值缺陷:OSTU算法在处理光照不均匀的图像的时候,效果会明显不好,因为利⽤的是全局像素信息。
otsu阈值处理 确定阈值的算法

otsu阈值处理确定阈值的算法
otsu阈值处理是一种自适应的二值化图像处理方法,它通过计算像素灰度值的方差来确定最佳的二值化阈值。
这种方法适用于背景和前景之间的灰度差异较大的图像。
otsu阈值处理的具体算法如下:
1. 统计图像灰度级的直方图,计算每个灰度级出现的频率。
2. 初始化类间方差为0,然后逐个尝试每个灰度级作为阈值,并将图像分为两个部分,每个部分的像素分别计算其均值和方差。
3. 根据分割后两部分的像素数量比例,分别计算出两个部分的加权均值。
然后根据这两个加权均值和分割后两部分的像素数量比例计算出类间方差。
4. 如果计算出的类间方差大于当前最大类间方差,则将当前灰度级作为最佳阈值,并将当前类间方差作为最大类间方差。
5. 重复步骤2至4,直到尝试完所有灰度级为止。
6. 返回最佳阈值。
otsu阈值处理的优点是可以自动确定最佳阈值,不需要人工干预,具
有更好的适应性。
在图像的二值化处理中,otsu阈值处理也被广泛应用。
在实际应用中,otsu阈值处理算法还需要注意一些问题。
首先是需要
对图像进行预处理,包括去噪和灰度级缩放等。
其次是需要根据具体
情况选择合适的处理方法。
例如,对于漏斗状的图像,可以使用形态
学操作进行处理,以提高分割效果。
综上所述,otsu阈值处理是一种基于类间方差的自适应二值化方法,
其算法简单、运算速度快、效果好。
在图像处理领域得到了广泛应用,并且是一种十分经典和有效的算法。
二值化阈值公式
二值化阈值公式
二值化阈值是图像处理中常用的一种方法,它将灰度图像转化为二值图像,使得像素只能取两个值,通常是0和255。
其中,0代表黑色,255代表白色。
1.全局阈值法:
阈值化公式:`S(x,y)=255,ifI(x,y)>T`
`S(x,y)=0,ifI(x,y)<=T`
其中,S(x,y)是输出二值图像中的像素值,I(x,y)是输入灰度图像中的像素值,T是设定的阈值。
2.自适应阈值法:
阈值化公式:`S(x,y)=255,ifI(x,y)>M(x,y)C`
`S(x,y)=0,ifI(x,y)<=M(x,y)C`
其中,M(x,y)是局部均值,用来估计局部背景亮度;C是一个常数,用来调节阈值的大小。
上述两种阈值化方法都是常见且简单易懂的阈值化方法,可以通过调整阈值或者常数来控制二值化的效果。
此外,还有一些其他的阈值化方法,如Otsu阈值法、最大熵阈值法等,它们根据具体的图像特点和应用需求来选择最佳的阈值。
通过以上的阈值化公式,可以实现对图像的二值化处理,得到所需的二值图像。
envi二值化处理步骤
envi二值化处理步骤引言:二值化是一种常用的图像处理技术,用于将灰度图像转换为二值图像。
在遥感图像处理中,二值化可以用于目标检测、图像分割等任务。
本文将介绍envi软件中的二值化处理步骤,包括图像预处理、阈值选择和二值化操作。
一、图像预处理在进行二值化处理之前,首先需要对图像进行预处理,以提高二值化的效果。
envi提供了多种图像预处理方法,如直方图均衡化、滤波等。
根据实际需求选择合适的预处理方法。
1. 直方图均衡化直方图均衡化是一种常用的图像增强方法,可以提高图像的对比度。
在envi中,可以通过菜单栏中的"图像"-"直方图"-"直方图均衡化"来进行直方图均衡化操作。
2. 图像滤波图像滤波可以去除图像中的噪声,提高图像的质量。
envi提供了多种滤波方法,如均值滤波、中值滤波等。
可以通过菜单栏中的"图像"-"滤波"来选择合适的滤波方法进行操作。
二、阈值选择阈值选择是二值化处理的关键步骤,它决定了图像中哪些像素值被认为是目标,哪些像素值被认为是背景。
envi提供了多种阈值选择方法,如手动选择、自动选择等。
1. 手动选择阈值手动选择阈值是一种简单直观的方法,可以根据图像的特点进行阈值选择。
在envi中,可以通过菜单栏中的"图像"-"直方图"-"手动选择阈值"来进行手动选择阈值的操作。
2. 自动选择阈值自动选择阈值是一种基于计算的方法,可以根据图像的统计特征选择合适的阈值。
envi提供了多种自动选择阈值的方法,如基于最大类间方差、基于迭代法等。
可以通过菜单栏中的"图像"-"直方图"-"自动选择阈值"来选择合适的自动选择阈值方法进行操作。
三、二值化操作阈值选择完成后,就可以进行二值化操作了。
图像二值化阈值选取常用方法汇总
图像二值化阈值选取常用方法最近在公司搞车牌识别的项目,车牌定位后,发现对车牌区域二值化的好坏直接影响后面字符切分的过程,所以就想把常用阈值选取方法做一个总结。
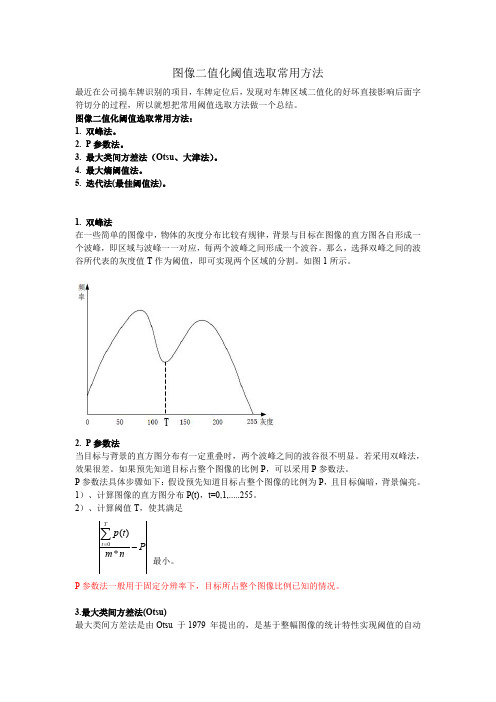
图像二值化阈值选取常用方法:1.双峰法。
2.P 参数法。
3.最大类间方差法(Otsu 、大津法)。
4.最大熵阈值法。
5.迭代法(最佳阈值法)。
1.双峰法在一些简单的图像中,物体的灰度分布比较有规律,背景与目标在图像的直方图各自形成一个波峰,即区域与波峰一一对应,每两个波峰之间形成一个波谷。
那么,选择双峰之间的波谷所代表的灰度值T 作为阈值,即可实现两个区域的分割。
如图1所示。
2.P 参数法当目标与背景的直方图分布有一定重叠时,两个波峰之间的波谷很不明显。
若采用双峰法,效果很差。
如果预先知道目标占整个图像的比例P ,可以采用P 参数法。
P 参数法具体步骤如下:假设预先知道目标占整个图像的比例为P ,且目标偏暗,背景偏亮。
1)、计算图像的直方图分布P(t),t=0,1,.....255。
2)、计算阈值T ,使其满足0()*Tt p t Pm n =-∑最小。
P 参数法一般用于固定分辨率下,目标所占整个图像比例已知的情况。
3.最大类间方差法(Otsu)最大类间方差法是由Otsu 于1979年提出的,是基于整幅图像的统计特性实现阈值的自动选取的,是全局二值化最杰出的代表。
Otsu 算法的基本思想是用某一假定的灰度值t 将图像的灰度分成两组,当两组的类间方差最大时,此灰度值t 就是图像二值化的最佳阈值。
设图像有L 个灰度值,取值范围在0~L-1,在此范围内选取灰度值T ,将图像分成两组G0和G1,G0包含的像素的灰度值在0~T ,G1的灰度值在T+1~L-1,用N 表示图像像素总数,i n 表示灰度值为i 的像素的个数。
已知:每一个灰度值i 出现的概率为/i i p n N =;假设G0和G1两组像素的个数在整体图像中所占百分比为01ϖϖ、,两组平均灰度值为01μμ、,可得概率:00=T ii p ϖ=∑11011L i i T p ωω-=+==-∑平均灰度值:00T i i ipμ==∑111L ii T i p μ-=+=∑图像总的平均灰度值:0011μϖμϖμ=+类间方差:()()()22200110101()g t ωμμωμμωωμμ=-+-=-最佳阈值为:T=argmax(g(t))使得间类方差最大时所对应的t 值。
图像二值化,阈值处理(十)

图像⼆值化,阈值处理(⼗)图像⼆值化:基于图像的直⽅图来实现的,0⽩⾊ 1⿊⾊ 定义:图像的⼆值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有⿊和⽩的视觉效果。
⼀幅图像包括⽬标物体、背景还有噪声,要想从多值的数字图像中直接提取出⽬标物体,常⽤的⽅法就是设定⼀个阈值T,⽤T将图像的数据分成两部分:⼤于T的像素群和⼩于T的像素群。
这是研究灰度变换的最特殊的⽅法,称为图像的⼆值化(Binarization)。
Python-OpenCV中提供了阈值(threshold)函数threshold(src, thresh, maxval, type, dst=None)函数:第⼀个参数 src 指原图像,原图像应该是灰度图。
第⼆个参数 x 指⽤来对像素值进⾏分类的阈值。
第三个参数 y 指当像素值⾼于(有时是⼩于)阈值时应该被赋予的新的像素值第四个参数 Methodsmethod阈值类型⼀般分为五种:cv2.THRESH_BINARY——⼤于阈值的部分像素值变为最⼤值,其他变为0cv2.THRESH_BINARY_INV——⼤于阈值的部分变为0,其他部分变为最⼤值cv2.THRESH_TRUNC——⼤于阈值的部分变为阈值,其余部分不变cv2.THRESH_TOZERO——⼤于阈值的部分不变,其余部分变为0cv2.THRESH_TOZERO_INV——⼤于阈值的部分变为0,其余部分不变import cv2 as cvimport numpy as np# 全局阈值def threshold_image(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)cv.imshow("原来", gray)# ⼤律法,全局⾃适应阈值参数0可改为任意数字但不起作⽤ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)print("yuzhi:%s" % ret)cv.imshow("OTSU", binary)# TRIANGLE法,,全局⾃适应阈值, 参数0可改为任意数字但不起作⽤,适⽤于单个波峰 ret, binary = cv.threshold(gray, 0, 255,cv.THRESH_BINARY | cv.THRESH_TRIANGLE) print("yuzhi:%s" % ret)cv.imshow("TRIANGLE", binary)# ⾃定义阈值为150,⼤于150的是⽩⾊⼩于的是⿊⾊ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_BINARY)print("yuzhi:%s" % ret)cv.imshow("define_yuzhi", binary)# ⾃定义阈值为150,⼤于150的是⿊⾊⼩于的是⽩⾊ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_BINARY_INV)print("yuzhi:%s" % ret)cv.imshow("define_rev", binary)# 截断⼤于150的是改为150 ⼩于150的保留ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_TRUNC)print("yuzhi:%s" % ret)cv.imshow("jieduan1", binary)# 截断⼩于150的是改为150 ⼤于150的保留ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_TOZERO)print("yuzhi:%s" % ret)cv.imshow("jieduan2", binary)src = cv.imread("yiner.jpg")threshold_image(src)cv.waitKey(0)cv.destroyAllWindows()函数threshold()的参数说明:#⼤律法,全局⾃适应阈值参数0可改为任意数字但不起作⽤cv.THRESH_BINARY | cv.THRESH_OTSU#TRIANGLE法,,全局⾃适应阈值, 参数0可改为任意数字但不起作⽤,适⽤于单个波峰cv.THRESH_BINARY | cv.THRESH_TRIANGLE# ⾃定义阈值为150,⼤于150的是⽩⾊⼩于的是⿊⾊cv.THRESH_BINARY# ⾃定义阈值为150,⼤于150的是⿊⾊⼩于的是⽩⾊cv.THRESH_BINARY_INV# 截断⼤于150的是改为150 ⼩于150的保留cv.THRESH_TRUNC# 截断⼩于150的是改为150 ⼤于150的保留cv.THRESH_TOZERO对应的阈值1 函数adaptiveThreshold( src,maxValue,adaptiveMethod,thresholdType,blockSize,C,dst=None)2 参数解说.第⼀个src:原始图像第⼆个maxValue:像素值上限第三个⾃适应⽅法adaptiveMethod: — cv2.ADAPTIVE_THRESH_MEAN_C :领域内均值 —cv2.ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权重为⼀个⾼斯窗⼝第四个值的赋值⽅法: 只有cv2.THRESH_BINARY 和cv2.THRESH_BINARY_INV第五个blockSize 规定领域⼤⼩(⼀个正⽅形的领域)第六个常数C, 阈值等于均值或者加权值减去这个常数(为0相当于阈值就是求得领域内均值或者加权值) 这种⽅法理论上得到的效果更好,相当于在动态⾃适应的调整属于⾃⼰像素点的阈值,⽽不是整幅图像都⽤⼀个阈值。
halcon 二值化阈值

halcon 二值化阈值在图像处理中,二值化是一种常见且重要的操作。
通过将图像中的像素灰度值映射为黑白两种颜色,从而将图像转化为只有黑白两种颜色的二值图像。
在Halcon软件中,二值化操作是非常常用的,并且Halcon提供了多种二值化阈值的计算方法,以适应不同的图像处理需求。
一、二值化简介二值化是将一幅图像转换为只有两种颜色的图像的过程。
这两种颜色通常是黑色和白色,也可以是其他两种特定的颜色。
二值化可以分割图像中的目标物体和背景,减少图像中的信息量,提取所需的目标特征,用于后续的图像处理和分析。
二、Halcon二值化方法Halcon提供了多种二值化阈值的计算方法,下面将分别介绍常用的几种方法。
1. 固定阈值法固定阈值法是最简单、最直接的二值化方法之一。
通过选择一个固定的灰度值作为阈值,大于该灰度值的像素设为白色,小于该灰度值的像素设为黑色。
具体操作步骤如下:①使用read_image函数将图像读入Halcon中。
②使用threshold函数进行固定阈值化处理,指定阈值。
③使用write_image函数将二值化后的图像保存。
2. 标准差法标准差法是根据图像灰度值的标准差进行二值化的方法。
通过计算整个图像的灰度标准差,将标准差的一定倍数作为阈值进行二值化。
具体操作步骤如下:①使用read_image函数将图像读入Halcon中。
②使用deviation_image函数计算图像的标准差。
③选择适当的倍数作为阈值放入threshold函数中进行二值化处理。
④使用write_image函数将二值化后的图像保存。
3. 迭代方法迭代方法是根据图像灰度直方图的波峰和波谷进行二值化的方法。
通过找到波峰和波谷之间的最佳阈值,进行二值化处理。
具体操作步骤如下:①使用read_image函数将图像读入Halcon中。
②使用gray_histo函数计算图像的灰度直方图。
③使用regulate函数对灰度直方图进行处理,得到平滑的直方图。
灰度图像二值化阈值选取常用方法课件

根据图像的局部特征自适应地确定阈值,能够更好地适应局 部变化。
在模式识别中的应用
特征提取
阈值选取可以用于提取图像的局部特征,如边缘、角点等,为后续的模式识别 提供特征向量。
分类器设计
阈值选取可以用于设计分类器,如阈值分类器、支持向量机等,对图像进行分 类和识别。
05
实验部分
实验一
全局阈值、自适应阈值
实验二
步骤
1. 定义窗口大小和步长,一般采用3x3或5x5的正 方形窗口。
2. 对于每个像素,以该像素为中心,计算窗口内 所有像素的灰度平均值。
实验二
01
3. 选择与平均灰度值最接近的像 素点作为阈值。
02
4. 将图像中的像素点进行二值化 处理,根据选择的阈值将像素点 分为背景或前景。
实验三
局部阈值、自适应阈值、抗噪声
自适应阈值选取法
根据局部图像信息动态计 算阈值,能够更好地适应 图像的局部变化。
自适应阈值选取法
• 定义:自适应阈值选取法是一种基于局部图像信息的阈值选取方法,它根据每 个像素点周围的局部区域的灰度分布信息来动态计算阈值。
• 方法流程:自适应阈值选取法通常采用滑动窗口法或区域生长法来实现。滑动 窗口法是通过在图像上滑动一个小窗口,计算窗口内像素点的灰度平均值或中 位数作为该窗口中心的阈值;区域生长法则是通过将像素点分为种子点和相邻 点,根据种子点的灰度值和相邻点的灰度分布信息来计算阈值。
• 优点:自适应阈值选取法能够更好地适应图像的局部变化,对于复杂背景和噪 声较多的图像具有较好的处理效果。同时,它能够减少人工干预,实现自动化 处理。
• 应用场景:自适应阈值选取法在图像处理、计算机视觉、模式识别等领域都有 广泛的应用,特别是在实时视觉检测、智能交通、医学图像处理等方面具有重 要作用。
灰度图像二值化阈值选取常用方法课件

02
CATALOGUE
阈值选取方法
直方图法
总结词:简单直观
详细描述:直方图法是一种基于图像灰度直方图的阈值选取方法。通过观察直方 图的分布,选择一个合适的阈值将图像分为前景和背景两部分。这种方法简单直 观,适用于背景和前景对比度较大的图像。
Otsu法
总结词
自动确定阈值
详细描述
Otsu法是一种基于灰度直方图和类间方差最大化的阈值选取方法。它通过迭代计算不同阈值下的类间方差,自动 确定一个最优的阈值,将图像分为前景和背景两部分。Otsu法能够自适应地处理不同对比度和亮度的图像。
02
跨领域应用研究
将阈值选取方法应用于其他领域,如医学影像分析、遥感图像处理等,
拓展阈值选取方法的应用范围。
03
实时性和性能优化
针对实时性要求较高的应用场景,如何优化阈值选取算法的性能和计算
效率,也是一个值得研究的方向。
THANKS
感谢观看
使用Python进行阈值选取的示例代码
from matplotlib import pyplot as plt img = color.rgb2gray(data.astronaut())
thresh = exposure.threshold_otsu(img)
使用Python进行阈值选取的示例代码
利用图像的局部特性,采用自适 应阈值选取方法,能够更好地处
理局部光照变化和噪声干扰。
机器学习方法
利用机器学习算法对大量训练数 据进行学习,自动确定最优阈值 ,可以提高阈值选取的效率和准
确性。
未来研究方向
01
深度学习在阈值选取中的应用
随着深度学习技术的发展,如何将深度学习技术应用于阈值选取中,提
opencv二值化算法

opencv二值化算法OpenCV提供了多种二值化算法,用于将灰度图像转换为二值图像。
1. 全局阈值法:- `cv2.THRESH_BINARY`:大于阈值的像素设为最大值,小于阈值的像素设为0。
- `cv2.THRESH_BINARY_INV`:大于阈值的像素设为0,小于阈值的像素设为最大值。
- `cv2.THRESH_TRUNC`:大于阈值的像素设为阈值,小于阈值的像素保持原值不变。
- `cv2.THRESH_TOZERO`:大于阈值的像素保持原值不变,小于阈值的像素设为0。
- `cv2.THRESH_TOZERO_INV`:大于阈值的像素设为0,小于阈值的像素保持原值不变。
2. 自适应阈值法:- `cv2.ADAPTIVE_THRESH_MEAN_C`:使用邻域均值作为阈值。
- `cv2.ADAPTIVE_THRESH_GAUSSIAN_C`:使用邻域加权和的高斯权重作为阈值。
使用方法如下:python# 全局阈值法_, binary_image = cv2.threshold(gray_image, threshold_value, max_value, threshold_type)# 自适应阈值法binary_image = cv2.adaptiveThreshold(gray_image, max_value, adaptive_method, threshold_type, block_size, constant)其中,`gray_image`为输入的灰度图像,`threshold_value`为全局阈值,`max_value`为最大值,`threshold_type`为阈值类型,`adaptive_method`为自适应阈值法的方法,`block_size`为计算阈值的邻域大小,`constant`为自适应阈值法中的常数。
注:以上代码中的`_`表示不使用该返回值。
halcon threshold阈值算法

halcon threshold阈值算法
Halcon Threshold是HALCON图像处理软件中的一种二值化算法。
它的主要作用是将图像中灰度值大于一定阈值的像素设置为白色,否则设置为黑色,从而将图像转换为黑白二值图。
该算法可以使用不同的阈值检测方法,如Renyi熵、Otsu等。
使用Halcon Threshold算法进行二值化处理的步骤如下:
1. 加载图像:将需要进行二值化处理的原始图像导入到Halcon软件。
2. 灰度化:将彩色图像转换为灰度图像。
3. 选择阈值检测方法:选择Halcon Threshold中的阈值检测方法,如Renyi 熵、Otsu等。
4. 设置阈值:根据选择的阈值检测方法,设置阈值。
5. 二值化处理:根据设置的阈值,进行二值化处理,将灰度值大于阈值的像素设置为白色,否则设置为黑色。
6. 结果显示:将处理后的二值图像在Halcon中展示出来,可以对处理结果进行查看和调整,优化处理效果。
Halcon Threshold是一种基本的图像处理算法,可以将灰度图像转换为黑白二值图像,从而便于后续的图像分析和处理。
它广泛应用于图像处理领域中的目标检测、轮廓提取、形态学变换等方面。
opencv adaptivethreshold参数详解

opencv adaptivethreshold参数详解在OpenCV 中,`cv2.adaptiveThreshold` 是一个自适应阈值化函数,用于将图像转换为二进制图像。
以下是`cv2.adaptiveThreshold` 函数的主要参数及其解释:```pythoncv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C)```1. `src`: 输入图像,必须是单通道图像(灰度图像)。
2. `maxValue`: 阈值化后的最大值,当满足条件时,像素值为`maxValue`,否则为0。
3. `adaptiveMethod`: 自适应阈值化的方法。
- `cv2.ADAPTIVE_THRESH_MEAN_C`:使用相邻区域的平均值作为阈值。
- `cv2.ADAPTIVE_THRESH_GAUSSIAN_C`:使用相邻区域的加权和,权重是一个高斯窗口。
4. `thresholdType`: 阈值类型,即二值化类型。
- `cv2.THRESH_BINARY`:大于阈值的像素值设置为`maxValue`,小于等于阈值的像素值设置为0。
- `cv2.THRESH_BINARY_INV`:与`cv2.THRESH_BINARY` 相反。
5. `blockSize`: 区域大小,用于计算相邻区域的平均值或加权和。
它是一个奇数,通常设置为3、5、7 等。
6. `C`: 从平均值或加权和中减去的常数。
通常为正数。
它用于调整阈值。
以下是一个示例:```pythonimport cv2import numpy as np# 读取灰度图像image = cv2.imread('input_image.jpg', cv2.IMREAD_GRAYSCALE)# 自适应阈值化adaptive_threshold = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)# 显示原图和阈值化后的图像cv2.imshow('Original Image', image)cv2.imshow('Adaptive Threshold', adaptive_threshold)cv2.waitKey(0)cv2.destroyAllWindows()```在上述示例中,`cv2.adaptiveThreshold` 使用了高斯自适应阈值化,其中`blockSize` 设置为11,`C` 设置为2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
if(*np > gmax) gmax=*np;
if(*np < gmin) gmin=*np;
np++; /* next pixel */
}
}
// set up everything
sum = csum = 0.0;
n = 0;
} //直方图平滑化
for (k = 0; k <= 255; k++)
{
total = 0;
for (t = -2; t <= 2; t++) //与附近2个灰度做平滑化,t值应取较小的值
算法对输入的灰度图像的直方图进行分析,将直方图分成两个部分,使得两部分之间的距离最大。划分点就是求得的阈值。
parameter: *image --- buffer for image
rows, cols --- size of image
则图像的总平均灰度为:u=w0*u0+w1*u1。
前景和背景图象的方差:g=w0*(u0-u)*(u0-u)+w1*(u1-u)*(u1-u)=w0*w1*(u0-u1)*(u0-u1),此公式为方差公式,可参照概率论课本
上面的g的公式也就是下面程序中的sb的表达式
step = 4;
break;
case PixelFormat.Format8bppIndexed:
step = 1;
break;
q = 255;
total = total + pixelNum[q]; //total为总和,累计值
}
pixelNum[k] = (int)((float)total / 5.0 + 0.5); //平滑化,左边2个+中间1个+右边2个灰度,共5个,所以总和除以5,后面加0.5是用修正值
/* takes a 2D unsigned char array pointer, number of rows, and */
/* number of cols in the array. returns the value of the threshold */
/*======================================================================*/
{
q = k + t;
if (q < 0) //越界处理
q = 0;
if (q > 255)
byte* pt = (byte*)bd.Scan0; int[] pixelNum = new int[256]; //图象直方图,共256个点
byte color;
byte* pline;
当方差g最大时,可以认为此时前景和背景差异最大,也就是此时的灰度是最佳阈值
OTSU方法计算图像二值化的自适应阈值
/*
OTSU 算法可以说是自适应计算单阈值(用来转换灰度图像为二值图像)的简单高效方法。
下面的代码最早由 Ryan Dibble提供,此后经过多人Joerg.Schulenburg, R.Z.Liu 等修改,补正。
fmax = -1.0;
n1 = 0;
for (k = 0; k < 255; k++) {
n1 += ihist[k];
if (!n1) { continue; }
n2 = n - n1;
if (n2 == 0) { break; }
csum += (double) k *ihist[k];
int n, n1, n2;
int total; //total为总和,累计值
double m1, m2, sum, csum, fmax, sb; //sb为类间方差,fmax存储最大方差值
当取最佳阈值时,背景应该与前景差别最大,关键在于如何选择衡量差别的标准
而在otsu算法中这个衡量差别的标准就是最大类间方差(英文简称otsu,这也就是这个算法名字的来源)
在本程序中类间方差用sb表示,最大类间方差用fmax
关于最大类间方差法(otsu)的性能:
OTSU方法计算图像二值化的自适应阈值
最大类间方差法(otsu)的原理:
阈值将原图象分成前景,背景两个图象。
前景:用n1, csum, m1来表示在当前阈值下的前景的点数,质量矩,平均灰度
后景:用n2, sum-csum, m2来表示在当前阈值下的背景的点数,质量矩,平均灰度
} //生成直方图
for (int i = 0; i < image.Height; i++)
{
pline = pt + i * bd.Stride;
for (int j = 0; j < image.Width; j++)
{
color = *(pline + j * step); //返回各个点的颜色,以RGB表示
pixelNum[color]++; //相应的直方图加1
}
*/
/*======================================================================*/
/* OTSU global thresholding routine */
int ihist[256]; // 图像直方图,256个点
int i, j, k; // various counters
int n, n1, n2, gmin, gmax;
double m1, m2, sum, csum, fmax, sb;
// 对直方图置零...
memset(ihist, 0, sizeof(ihist));
gmin=255; gmax=0源自 // 生成直方图 for (i = y0 + 1; i < y0 + dy - 1; i++) {
np = &image[i*cols+x0+1];
for (j = x0 + 1; j < x0 + dx - 1; j++) {
thresholdValue = k;
}
}
// at this point we have our thresholding value
// debug code to display thresholding values
if ( vvv & 1 )
fprintf(stderr,"# OTSU: thresholdValue = %d gmin=%d gmax=%d\n",
int k, t, q;
int threshValue = 1; // 阈值
int step = 1;
switch (image.PixelFormat)
x0, y0, dx, dy --- region of vector used for computing threshold
vvv --- debug option, is 0, no debug information outputed
if (!n) {
// if n has no value, there is problems...
fprintf (stderr, "NOT NORMAL thresholdValue = 160\n");
return (160);
}
// do the otsu global thresholding method
类间方差法对噪音和目标大小十分敏感,它仅对类间方差为单峰的图像产生较好的分割效果。
当目标与背景的大小比例悬殊时,类间方差准则函数可能呈现双峰或多峰,此时效果不好,但是类间方差法是用时最少的。
最大最大类间方差法(otsu)的公式推导:
记t为前景与背景的分割阈值,前景点数占图像比例为w0, 平均灰度为u0;背景点数占图像比例为w1,平均灰度为u1。
thresholdValue, gmin, gmax);
return(thresholdValue);
}
另外一个
unsafe public int GetThreshValue(Bitmap image)
{
BitmapData bd = image.LockBits(new Rectangle(0, 0, image.Width, image.Height), ImageLockMode.WriteOnly, image.PixelFormat);
{
case PixelFormat.Format24bppRgb:
step = 3;
break;
case PixelFormat.Format32bppArgb:
for (k = 0; k <= 255; k++) {
sum += (double) k * (double) ihist[k]; /* x*f(x) 质量矩*/
n += ihist[k]; /* f(x) 质量 */
}
m1 = csum / n1;
m2 = (sum - csum) / n2;
sb = (double) n1 *(double) n2 *(m1 - m2) * (m1 - m2);