X-Y数控工作台机电系统设计-数控系统总体方案设计
《数控机床》课程设计---X-Y数控工作台机电系统设计
《数控机床》课程设计说明书设计题目:X-Y数控工作台机电系统设计班级:姓名:指导教师:目录一、《数控机床》课程设计目的 (3)二、设计任务 (3)三、设计主要步骤 (3)1、确定设计总体方案 (4)(1)、机械传动部件的选择 (4)(2)、控制系统的设计 (4)2、机械传动部件的计算与选型 (5)(1)、导轨上移动部件的重量估算 (5)(2)、计算切削力 (5)(3)、滚珠丝杠传动的设计计算及校验 (6)(4)、步进电机的传动计算及电动机的选用 (9)(5)、滚动导轨的设计计算 (15)3、其余附件的选择 (16)四、控制系统的设计 (17)五、机械部分装配图的绘制 (19)六、参考文献 (20)七、总结体会 (20)一、设计的目的《数控机床》课程设计是一个重要的时间性教学环节,要求学生综合的运用所学的理论知识,独立进行的设计训练,主要目的:1、通过设计,使学生全面地、系统地了解和掌握数控机床的基本组成及其想怪知识,学习总体的方案拟定、分析与比较的方法。
2、通过对机械系统的设计,掌握几种典型传动元件与导向元件的工作原理、设计计算及选用的方式 3、通过对机械系统的设计,掌握常用伺服电机的工作原理、计算控制方法与控制驱动方式 4、 培养学生独立分析问题和解决问题的能力,学习并树立“系统设计”的思想 5、 锻炼提高学生应用手册和标准、查阅文献资料及撰写科技论文的能力二、设计任务设计一套供立式数控铣床使用的X-Y 数控工作台,主要参数如下:1、立铣刀最大直径的d=15mm ,立铣刀齿数Z=3,最大铣削宽度c a =15mm 最大背吃刀量p a =8mm ,加工材料为碳素钢或有色金属。
2、X 、Z 方向的定位精度均为±0.02mm 。
3、工作台面尺寸为230mm 230mm ⨯,加工范围为250mm 250mm ⨯;4、工作台空载进给最快移动速度:max max 3000mm /min x y V V ==,工作台进给最快移动速度:max ymax 400mm/min x f f V V ==,加减速0.4s 。
数控钻床X—Y数控工作台设计

数控钻床X—Y数控工作台设计引言:数控钻床是一种应用数控技术进行钻孔加工的机床。
X—Y数控工作台是数控钻床中的一个重要部件,它能够提供X轴和Y轴方向的运动,实现工件的精确定位和加工。
本文将对数控钻床X—Y数控工作台的设计进行讨论和探索。
一、需求分析:在进行数控钻床X—Y数控工作台的设计之前,我们首先需要对其需求进行全面的分析。
数控钻床X—Y数控工作台主要用于钻孔加工,因此需要具备以下功能和性能:1.能够实现X轴和Y轴方向的精确运动,并能够快速定位;2.具备高精度定位和加工能力,满足不同工件的加工需求;3.高刚度和稳定性,能够承受较大的切削力;4.操作简单、易于维护。
二、设计方案:基于需求分析,我们可以提出以下设计方案:1.结构设计:选用高刚度的结构设计,采用铸铁或钢材作为材料,增加机床的稳定性和刚度。
2.运动系统设计:采用直线导轨和滚珠丝杠作为定位和传动机构,实现X轴和Y轴的准确运动控制。
3.控制系统设计:采用数控系统进行控制,通过编程控制钻孔的位置、进给速度等参数。
4.电气系统设计:选用高品质驱动器和电机,确保工作台的平稳运行。
5.人机界面设计:设计直观、易操作的人机界面,方便操作员进行钻孔程序的编写和工作台的操作控制。
6.安全设计:设置安全装置,如急停按钮、防护罩等,确保操作人员的人身安全。
三、具体实施:1.结构设计:针对工作台的刚性需求,选用铸铁作为主要结构材料,通过有限元分析等方法进行结构优化设计,确保机床的稳定性和刚度。
2.运动系统设计:选用高精度直线导轨和精密滚珠丝杠,通过传感器和编码器实时反馈位置信息,实现更精确的定位和运动控制。
3.控制系统设计:选用先进的数控系统,通过编程控制钻孔位置、进给速度等参数,实现自动化运行和高效率加工。
4.电气系统设计:选用高品质电机和驱动器,结合合适的减速装置,确保工作台的平稳运行和高速加工。
5.人机界面设计:设计直观、易操作的人机界面,可以通过触摸屏或键盘等方式进行操作,方便操作员进行加工参数的设置和调整。
x-y数控工作台系统设计
x-y数控工作台系统设计数控工作台(NC台)是一种能够实现自动化控制的机床,通过控制系统控制运动轴,实现加工工件的自动化生产。
NC台具有高精度、高效率和高质量等优点,被广泛应用于机械制造、汽车制造、电子制造等行业。
本文基于x-y数控工作台进行系统设计,主要包括硬件设计和软件设计两个方面。
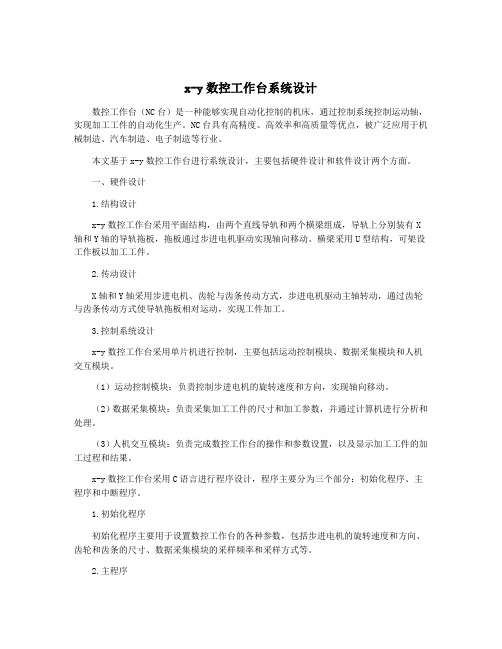
一、硬件设计1.结构设计x-y数控工作台采用平面结构,由两个直线导轨和两个横梁组成,导轨上分别装有X 轴和Y轴的导轨拖板,拖板通过步进电机驱动实现轴向移动。
横梁采用U型结构,可架设工作板以加工工件。
2.传动设计X轴和Y轴采用步进电机、齿轮与齿条传动方式,步进电机驱动主轴转动,通过齿轮与齿条传动方式使导轨拖板相对运动,实现工件加工。
3.控制系统设计x-y数控工作台采用单片机进行控制,主要包括运动控制模块、数据采集模块和人机交互模块。
(1)运动控制模块:负责控制步进电机的旋转速度和方向,实现轴向移动。
(2)数据采集模块:负责采集加工工件的尺寸和加工参数,并通过计算机进行分析和处理。
(3)人机交互模块:负责完成数控工作台的操作和参数设置,以及显示加工工件的加工过程和结果。
x-y数控工作台采用C语言进行程序设计,程序主要分为三个部分:初始化程序、主程序和中断程序。
1.初始化程序初始化程序主要用于设置数控工作台的各种参数,包括步进电机的旋转速度和方向、齿轮和齿条的尺寸、数据采集模块的采样频率和采样方式等。
2.主程序(3)根据加工工件的尺寸和加工参数计算出工作台的运行参数,并将计算结果传输给运动控制模块。
(4)定时更新数控工作台的运行参数,保证加工的稳定性和精度。
3.中断程序中断程序是数控工作台的辅助程序,主要用于接收外部的信号和响应用户的操作。
具体流程如下:(1)接收外部的信号,并根据信号类型跳转到相应的程序段。
(2)响应用户的操作,如调整加工参数、停止加工、保存加工结果等。
三、总结本文基于x-y数控工作台进行系统设计,主要包括硬件设计和软件设计两个方面。
数控车床XY轴工作台和控制系统设计

数控车床XY轴工作台和控制系统设计数控车床是一种通过编程控制刀具在工件表面上进行切削操作的机床。
其中,XY轴工作台和控制系统是数控车床的核心组成部分。
在设计这些部分时,需要考虑机床的精度、稳定性、速度和可编程性等方面。
首先,设计XY轴工作台时需要考虑其机械结构和精度。
机床的工作台需要具备足够的刚性和稳定性,以确保在切削过程中不产生振动和变形。
同时,工作台的导轨和丝杆等传动装置需要具备高精度和低摩擦系数,以保证工件加工的精度和表面质量。
其次,控制系统的设计是数控车床的关键。
控制系统包括硬件和软件两个方面。
在硬件方面,需要选择适合的数控装置、电机和传感器等,以便实现高精度的位置控制。
在软件方面,需要开发编程界面和运动控制算法,以便实现工件加工的自动化和高效率。
在设计控制系统时,需要考虑以下几个关键问题。
首先是编程界面的设计,即操作人员与机床之间的交互方式。
常见的编程界面有G代码和M代码等,操作人员可以通过这些代码来描述加工过程的具体要求。
其次是运动控制算法的设计,即根据编程要求计算出各个轴的运动轨迹和速度。
在运动控制过程中,需要考虑工件表面的曲率和加工精度的要求,以便实现高品质的加工效果。
最后是运动控制的实时性要求,即在短时间内对运动轨迹和速度进行精确控制。
这对硬件设备和软件算法的性能提出了较高的要求。
总结起来,数控车床的XY轴工作台和控制系统的设计是一项复杂而关键的任务。
在设计过程中,需要考虑机床的精度、稳定性、速度和可编程性等方面。
同时,需要选择适合的数控装置、电机和传感器等硬件设备,并开发编程界面和运动控制算法等软件。
通过合理的设计和选择,可以实现数控车床的高效加工和高品质加工。
毕业设计---X-Y数控工作台机电系统设计

毕业设计说明书题目:X-Y数控工作台机电系统设计----Y向工作台三维绘图学院:电气信息系专业:机电一体化摘要目前国内中小企业多采用经济型X-Y数控铣床系统,其工作台是机床上必不可少的部件,工作台的自动化能大大减轻劳动强度,提高劳动生产率。
随着经济的发展,机械行业的许多普通机床和闲置设备,经过数控改造以后,不但可以提高加工精度和生产率,而且能有效的适应多种品种,小批量的市场需求,使之更有效的发挥经济效益和设计效益。
本课题设计了X-Y数控工作台,该平台由两个一维平台叠加实现,其中一维平台由电机带动滚珠丝杠旋转,从而带动螺母副和工作平台完成直线运动,具体实现时先要确定工作平台的各个参数让其能满足题目的要求,再通过精密计算导轨上移动部件的重量估算、铣削力、直线滚动导轨副、滚珠丝杠螺母副等来确定要制作的数控工作平台,最后通过SolidWorks画出设计的工作平台。
本论文的主要设计内容重点是SolidWorks三维建模,根据设计的机械零部件尺寸完成Y方向工作台零件的三维造型,SolidWorks绘图过程中,先画出单个的零部件,其主要通过一些简单的绘图、拉伸、剪切、扫描、阵列等工具进行建模,然后对这些零件进行一系列的装配,主要通过一些面、线的重合、平行、同心等过程进行装配,从而直观清晰的显示出Y方向工作台的内部结构。
关键词 X-Y数控工作台 直线滚动导轨副SolidWorks目录第一章绪论 (5)1.1、目的和意义 (5)1.2、国内外现状 (5)1.3、本设计的主要内容和任务 (6)第二章总体方案的确定 (7)2.1 总体方案 (7)2.2 机械传动部件的选择 (7)第三章机械传动部件的计算与选型 (9)3.1 导轨上移动部件的重量估算 (9)3.2 铣削力的计算 (9)3.3 直线滚动导轨副的计算与选型(纵向) (9)3.4 滚珠丝杠螺母副的计算与选型 (10)第四章 SolidWorks制图 (15)4.1 SolidWorks介绍 (15)4.2 SolidWorks制图 (16)第五章总结与展望 (19)参考文献 (21)致谢 (21)第一章绪论1.1目的和意义本设计所设计的X-Y工作台采用了低摩擦的直线滚动导轨和精密的丝杠,它的工作原理是通过MCS-51单片机来控制步进电机,使X-Y工作台实现了数控控制。
X-Y数控工作台机电系统设计-12页文档资料

一种经济型数控机床的控制系统,包括机床伺服系统和对该伺服系统进行控制的PLC;其特征在于,还包括通过通信接口与PLC通信的触摸屏,所述触摸屏包括:数据输入模块,用于输入、修改被控参数的参数值和操作指令,读取触摸屏的操作界面;数据存储模块,用于存储输入、输出数据;数据处理计算模块,用于对输入、输出参数数据进行处理、计算;包括输入信号的编码运算;输出信号的解码运算;数据存储单元,用于存储移位单元传递来的数据;数据检测单元,用于实时检测坐标轴的当前运动状态参数值,包括距离、速度值,以及控制方式参数值;数据比较单元,用于将检测单元检测到的坐标轴当前运动状态参数值、控制方式参数值与触摸屏存储模块的设定值进行比较;X-Y数控工作台机电系统设计采用步进电机作为驱动装置。
步进电机是一个将脉冲信号转移成角位移的机电式数模转换器装置。
其工作原理是:每给一个脉冲便在定子电路中产生一定的空间旋转磁场;由于步进电机通的是三相交流电所以输入的脉冲数目及时间间隔不同,转子的旋转快慢及旋转时间的长短也是不同的。
由于旋转磁场对放入其中的通电导体既转子切割磁力线时具有力的作用,从实现了旋转磁场的转动迫使转子作相应的转动,所以转子才可以实现转子带动丝杠作相应的运动。
模块化的X-Y数控工作台,通常由导轨座、移动滑块、工作平台、滚珠丝杠螺母副以及伺服电动机等部件构成。
其外观形式如图1所示。
其中,伺服电动机作为执行元件用来驱动滚珠丝杠,滚珠丝杠的螺母带动滑块和工作平台在导轨上运动,完成工作台在X、Y方向的直线移动。
导轨副、滚珠丝杠螺母副和伺服电动机等均已标准化,由专门厂家生产,设计时只需根据工作载荷选取即可。
控制系统根据需要,可以选用标准的工业控制计算机,也可以设计专用的微机控制系统。
题目:X-Y数控工作台机电系统设计任务:设计一种供立式数控铣床使用的X-Y数控工作台,主要参数如下:(1)立铣刀最大直径d =15 mm;(2)立铣刀齿数Z=3;(3)最大铣削宽度a e=15 mm;(4)最大铣削深度a p=8 mm;(5)加工材料为碳素钢(6)X、Y方向的脉冲当量δx =δy=0.005mm/脉冲;(7)X、Y方向的定位精度均为±0.01 mm;(8)工作台面尺寸为230 mm×230 mm,加工范围为300 mm×200 mm;(9)工作台空载最快移动速度v xmax =v ymax =3000 mm/min;(10)工作台进给最快移动速度v xmaxf =v ymaxf =1200 mm/min。
X-Y数控工作台机电系统设计

X-Y数控工作台机电系统设计简介本文档旨在介绍X-Y数控工作台的机电系统设计方案。
X-Y数控工作台是一种能够实现在二维平面上进行精密定位和移动的工作台,通常用于加工、装配和检测等工作场景。
机电系统是该工作台的核心组成部分,负责控制工作台的运动和定位。
机械结构X-Y数控工作台的机械结构采用传统的XY平面结构,其中X轴和Y轴分别对应水平方向和垂直方向的移动。
工作台通过导轨、丝杠和电机实现位置的精密控制。
机械结构的设计需要考虑以下几个方面:1.刚性:机械结构需要具备足够的刚性,以保证工作台在运动和加工过程中的稳定性和精度。
2.导轨选型:导轨是机械结构的关键组成部分,需要选择高精度、低摩擦的导轨,以实现工作台的准确定位。
3.丝杠传动:为了保证工作台的高速运动和高精度定位,通常采用丝杠传动和步进电机驱动的方式。
丝杠需要选择精度高、承载能力强的型号,并考虑到丝杠的进给速度和负载特性。
4.电机选型:电机是工作台实现运动的关键,需要选择合适的步进电机或伺服电机。
选取电机时需要考虑到运动速度、加速度、精度要求和负载特性等因素。
电气控制系统电气控制系统是X-Y数控工作台的关键组成部分,负责实现机械系统的运动控制和位置定位。
电气控制系统的设计需要考虑以下几个方面:1.控制器:选择合适的数控控制器,如PLC、CNC等,能够满足工作台运动控制的要求,包括速度、加速度、精度和多轴控制等。
2.编码器:为了实现位置的准确度,可以在电机和丝杠之间增加编码器,通过反馈信号实时检测位置,从而调整电机的控制信号。
3.电气线路:设计合理的电气线路,包括电源线路、信号线路和电机驱动器连接线路等。
电源线路需要满足工作台电气设备的功率需求,而信号线路需要保证稳定和可靠的传输控制信号。
4.驱动器:选择适合的电机驱动器,根据电机类型和工作台运动需求确定驱动器的性能指标,如控制精度、输出功率和最大电流等。
软件控制系统软件控制系统是X-Y数控工作台的核心,通过编程实现工作台的运动控制和位置定位。
X-Y数控工作台机电系统设计说明书

X-Y数控工作台机电系统设计xxxxxxxxxxxxxxxxxxxx摘要当今世界电子技术迅速发展,微处理器、微型计算机在各技术领域得到了广泛应用,对各领域技术的发展起到了极大的推动作用。
一个较完善的机电一体化系统,应包含以下几个基本要素:机械本体、动力与驱动部分、执行机构、传感测试部分、控制及信息处理部分。
机电一体化是系统技术、计算机与信息处理技术、自动控制技术、检测传感技术、伺服传动技术和机械技术等多学科技术领域综合交叉的技术密集型系统工程。
新一代的CNC系统这类典型机电一体化产品正朝着高性能、智能化、系统化以及轻量、微型化方向发展。
关键字:机电一体化的基础控制自动化系统化1引言机电一体化是多学科领域综合交叉的技术密集型系统工程,它是融合检测传感技术,信息处理技术、自动控制技术、伺服驱动技术、精密机械技术、计算机技术和系统总体技术等多种技术于一体的新兴综合性学科。
随着机电一体化技术的产生和发展,在世界范围内掀起的机电一体化热潮,使机电一体化越来越显示出强大的威力,它使机械产品向着高技术密集——机电一体化的方向发展。
机电一体化课程设计在机电一体化专业教学中占有重要位置,它关系到学生知识的综合运用和学生动手能力的培养及机电产品开发的能力。
因此设计内容选择很重要。
基于微型计算机控制的X-Y工作台是典型的机电一体化系统,以此为设计内容有较强的教学研究意义。
培养我们理论联系实际,解决生产实际问题能力的重要步骤,它起到了设计的作用。
通过对X-Y工作台的设计总体方案的拟定,进给伺服系统机械部分结构设计.计算控制系统硬件电路的设计以及数控机床加工程序的编制,使我们综合运用所学的机械.电子和微机的知识,进行一次机电结合的全面训练。
从而培养了我们具有加工编程能力,初步设计计算的能力以及分析和处理生产中所遇到的机电方面技术问题的能力。
本设计是以PC平台为基础的数控X-Y工作台实验系统,它具有直线插补和圆弧插补等数控系统所使用的常用功能,结构简单,操作方便,控制精度相对较高, 可靠性、稳定性和实用性都很好。
数控X_Y工作台和控制系统设计方案

数控X-Y工作台及其控制系统设计方案第二章课程设计的容和要求2.1 课程设计的容任务是:设计一个数控X-Y工作台及其控制系统。
该工作台可安装在铣床上,用于铣削加工。
具体参数如下:设计容包括:2.1.1数控装置总体方案的确定确定系统组成方案(组成框图、功能、机械传动系统简图、主要的设计参数,及方案分析、比较、说明)。
2.1.2机械部分的设计(1) 确定脉冲当量;(2) 机械部件的总体尺寸及重量、转动惯量的初步估算;(3) 传动元件及导向元件的设计,计算和选用;(4) 伺服电机计算、选用;(5) 绘制机械结构装配图;2.1.3数控系统的设计(1)确定数控系统装置方案(组成框图、功能、主要的设计参数,及方案分析、比较、说明)。
(2) 电气控制原理图设计(CPU、存储器、I/O接口电路及伺服驱动电路)(3) 系统控制软件的结构设计(控制流程图)和部分功能控制软件设计(汇编程序及流程图)。
2.2 课程设计的要求2.2.1图纸要求(1)机械结构装配图,A0图纸一。
要求视图基本完整、符合要求。
其中至少有一个坐标轴的完整剖视图。
(2)数控系统框图(附在说明书上)。
(3)数控电器图,A1图纸一。
(4)软件框图(可附在说明书上)。
2.2.2编写设计说明书要求说明书应当叙述整个设计的容,包括总体方案的确定、系统框图的分析、机械传动设计计算、电气部分的设计说明,选用元件及其具体参数的说明、软件设计及其说明等,说明书不少于8000字第三章系统的总体方案确定数控系统总体方案设计的容包括:系统运动方式的确定,执行机构及传动方案的确定,伺服电机类型及调速方案确定,计算机控制系统的选择。
进行方案的分析、比较和论证。
3.1系统运动方式的确定该系统要求工作台沿各坐标轴的运动有精确的运动关系因此采用连续控制方式。
3.2伺服系统的选择开环伺服系统在负载不大时多采用功率步进电机作为伺服电机.开环控制系统由于没有检测反馈部件,因而不能纠正系统的传动误差。
X-Y数控工作台方案设计介绍说明

1、总体方案设计1.1 设计任务课程设计任务:设计两轴联动的数控X-Y运动平台,完成机械系统设计、控制系统设计与相应软件编程,根据实验条件进行调试,完成整个开发系统。
1.2 总体方案确定1.2.1 方案确定思想方案一:机械部分传动:滚珠丝杠螺母副支撑:双推-双推式滑动导轨控制部分控制器件:单片机控制方式:开环控制伺服电机:步进电动机优点:采用滚珠丝杠螺母副,可实现旋转运动与直线运动相互转换,在具有螺旋槽的丝杠螺母中装有滚珠作为中间传动元件,以减少摩擦。
优点是摩擦系数小,传动效率高,灵敏度高,传动平稳,不易产生滑行,传动精度和定位精度高;磨损小,使用寿命长,精度保持性好。
双推式支撑实现高精度传动,采用单片机控制步进电动机,响应快速而准确。
缺点:滚珠丝杠螺母副的不足在于制造工艺复杂,成本高,不能自锁,故需附加制动装置。
开环控制精度比较低。
方案二:机械部分传动:同步带传动支撑:滑动导轨控制部分控制器件:单片机控制方式:开环控制伺服电机:直流无刷电机优点:同步带传动无相对滑动,传动比准确,传动精度高,齿形带的强度高,厚度小、重量轻,故可用于高速传动;传动比恒定,同步带无需特别涨紧,因而作用于轴和轴承等上的载荷小,传动效率高。
单片机控制直流无刷电机,空载电流小,效率高。
缺点:同步带工作时候有温度要求,安装精度要求较高,中心间距要求较高,有时候需要张紧,安装麻烦。
无刷直流电机启动时有震动,控制器要求高,价格高。
采用开环精度较低。
方案三:机械部分传动:齿轮齿条支撑:直线导轨控制部分控制器件:单片机控制方式:闭环控制伺服电机:直流无刷电机优点:齿轮齿条传动功率大,精度高,稳定性好,响应速度快。
单片机控制直流无刷电机,无刷直流电机启动时有震动,控制器要求高,价格高。
采用开环精度较低。
采用闭环控制,精度高。
双线导轨稳定。
缺点:齿轮齿条无自锁,需要外加自锁机构。
噪音大,磨损较快。
1.2.2 方案对比分析与确定综合课程设计要求,精度为0.04mm,最大载荷是500N,相比同步带和齿轮齿条传动,滚珠丝杠传动更符合精度要求,因为丝杠传的动的精度可以达到±0.01mm,而同步带传动时会产生弹性变形,具有一定的蠕变性。
X-Y工作台总体方案

第一章前言工作台是机床上必不可少的部件,工作台的自动化能大大减轻劳动强度,提高劳动生产率。
数控工作台设计在生产实践中还有很多现实意义和经济效益。
随着经济的发展,机械行业的许多普通机床和闲置设备,经过数控改造以后,不但可以提高加工精度和劳动生产率,而且能有效的适应多品种,小批量的市场经济的需要,使之更有效的发挥经济效益和社会效益。
X-Y数控工作台是许多机电一体化设备的基本部件,如数控车床的纵-横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。
因此,选择X-Y数控工作台作为机电综合课程设计的内容,具有普遍意义。
第二章总体方案的确定2. 1机械系统部件的选择2.1.1导轨副的选用常用的导轨副有滑动导轨、滚动导轨。
下面我们大概对滑动导轨、滚动导轨进行一下对比如下表所示。
要设计的数控铣床作台,需要承受的载荷不大,而且脉冲当量小,定位精度不高,因此选用直线滑动矩形导轨副,它具有结构简单,制造、检验和维修方便,导轨面较宽,承载能力大,刚度高等特点。
2.1.2丝杠螺母副的选用本次课程设计所要求设计的是简单的经济型x-y数控工作台,可用于数控钻床上,提高工作效率和减轻劳动强度。
在设计要求中,工作台尺寸并不大,切削力小,重复定位精度也不高。
工作台行程也比较小,经比较传动部分选滚珠丝杠螺母传动更有利于结构的紧凑性。
2. 2控制系统的选择控制系统由微机部分、I/O接口、步进电机、脉冲分配器、功率放大器电路及光电隔离电路等组成。
设计的X-Y工作台准备用在数控铣床上,其控制系统应该具有单坐标定位、两坐标直线插补与圆弧插补的基本功能,所以控制系统应该设计成连续控制型。
2. 3 总体方案的拟定考虑到定位精度要求不高和经济性的原因,以及目前国内外很多机床厂生产的此类机床均采了开环控并制取得了很好的效果,因此本次设计采用开环控制系统,机械传动部件采用滚珠丝杠传动, 结构简单工作可靠稳定性好,选用MCS-51-8031单片机和相应的驱动电路对两个三相混合式步进电机进行开环控制,又由于工作负载很小,可以由步进电机直接驱动丝杠旋转而不需要中间减速装置,初步拟定总体方案如图2-1所示:图2-1 X-Y工作台总体方案第三章 机械传动部件的计算与选型3.1 基本参数预置3.1.1 导轨上移动部件的重量估算重量:按重量=体积×材料比重估算 (灰铸铁HT200的密度为7.2g/cm3) 工作台面尺寸:250mm ×250mm ×20mm工作台重量=25mm ×25mm ×2mm ×7.2g/cm3×10×10-3=90N 。
数控x-y工作台系统设计

第1章绪论1.1数控机床的概述随着科学技术的飞速发展和经济竞争的日趋激烈,产品更新速度越来越快,复杂形状的零件越来越多,精度要求越来越高,多品种、中小批量生产的比重明显增加。
激烈的市场竞争使产品研制生产周期越来越短。
传统的加工设备和制造方法已难于适应这种多样化、柔性化与复杂形状零件的高效高质量加工要求。
因此近几十年来,世界各国十分重视发展能有效解决复杂、精密、小批多变零件的数控加工技术,在加工设备中大量采用以微电子技术和计算机技术为基础的数控技术。
目前,数控技术正在发生根本性变革,它集成了微电子、计算机、信息处理、自动检测、自动控制等高新技术于一体,具有高精度、高效率、柔性自动化等特点,对制造业实现柔性自动化、集成化、智能化起着举足轻重的作用。
汽车、拖拉机与家用电器等行业的产品零件,为了解决高产优质的问题,多采用专用的工艺装备、专用自动化机床或专用的自动生产线和自动化车间进行生产。
但是应用这些专用生产设备,生产准备周期长,产品改型不易,因而使新产品的开发周期增长。
在机械产品中,单件与小批量产品占到70%一80%,这类产品一般都采用通用机床加工,当产品改变时,机床与工艺装备均需作相应的变换和调整。
通用机床的自动化程度不高,基本上由人工操作,难于提高生产效率和保证产品质量,特别是一些由曲线、曲面轮廓组成的复杂零件,只能借助靠模和仿形机床,或者借助划线和样板用手工操作的方法来加工,加工精度和生产效率受到很大的限制。
数控机床就是为了解决单件、小批量、特别是复杂型面零件加工的自动化并保证质量要求而产生的,它为单件、小批生产的精密复杂零件提供了自动化加工手段。
数控技术是制造业实现自动化、柔性化、集成化生产的基础,现代的CAD/CAM、FMS、CIMS等,都是建立在数控技术之上,离开了数控技术,先进制造技术就成了无本之木。
同时,数控技术的利用关系到国家的战略地位,是体现国家综合国力水平的重要基础性产业,其水平高低是衡量一个国家制造业现代化程度的核心标志,实现加工机床及生产过程数控化,已经成为当今制造业的发展方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、引言现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
在机械工程领域,由于微电子技术和计算机技术的迅速发展及其向机械工业的渗透所形成的机电一体化,使机械工业的技术结构、产品机构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化”迈入了“机电一体化”为特征的发展阶段。
其中X-Y数控工作台及其控制系统就是一个典型的机电一体化系统,而本文所设计的X-Y数控工作台及其控制系统机电系统设计是一个开环控制系统,其结构简单。
实现方便而且能够保证一定的精度。
降低成本,是微机控制技术的最简单的应用。
它充分的利用了危机的软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高。
X-Y 数控工作台机电系统设计是利用8031单片机,及2764,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能。
2、数控系统总体方案设计2.1 设计任务设计一个数控X-Y工作台及其控制系统。
该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm,定位精度为0.025mm。
设计参数如下:负载重量G=150N;台面尺寸C×B×H=145mm×160mm×12mm;底座外形尺寸C1×B1×H1=210mm×220mm×140mm;最大长度L=388mm;工作台加工范围X=55mm,Y=50mm;工作台最大快移速度为1.5m/min。
2.2 总体方案确定(1)系统的运动方式与伺服系统由于工件在移动的过程中没有进行切削,故应用点位控制系统。
定位方式采用增量坐标控制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y工作台。
(2)计算机系统X-Y数控工作台机电系统设计是利用8031单片机,及2764,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过圆弧或者直线插补程序以实现对零件进行几何加工,每进行一段加工都要产生一定的脉冲以驱动电机正反转,同时通过8155(1)将相应的加工进刀信息送至刀架库中以实现以之相应的走刀,电机和刀具的相对运动所以实现了刀具对工件的加工。
本设计采用了与MCS-51系列兼容的A T89S51单片机控制系统。
它的主要特点是集成度高,可靠性好,功能强,速度快,有较高的性价比。
控制系统由微机部分、键盘、LED、I/O接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。
系统的加工程序和控制命令通过键盘操作实现。
LED显示数控工作台的状态。
(3)X-Y工作台的传动方式为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。
为提高传动刚度和消除间隙,采用预加负荷的结构。
由于工作台的运动载荷不大且要求结构简单,因此采用有预加载荷的圆形滚珠导轨。
采用滚珠导轨可减少两个相对运动面的动、静摩擦系数之差,从而提高运动平稳性,减小振动。
考虑电机步距角和丝杆导程只能按标准选取,为达到分辨率的要求,需采用齿轮降速传动。
图2-1 系统总体框图3、机械系统设计机械部分设计内容包括:确定系统脉冲当量,运动部件惯性的计算,选择步进电机,传动及导向元件的设计、计算与选择,绘制机械部分装配图等。
脉冲当量δp是一个进给指令时工作台的位移量,应小于等于工作台的位置精度,由于定位精度为±0.01mm因此选择脉冲当量为0.01mm。
3.1、工作台外形尺寸及重量估算3-1工作台简图取X 向导轨支撑钢球的中心距为145mm,Y 向导轨支撑钢球的中心距为160mm,设计工作台简图如下:X 向拖板(上拖板)尺寸:长⨯宽⨯高 145×160×50 重量:按重量=体积×材料比重估算=X W 3214516050107.81090--⨯⨯⨯⨯⨯≈NY 向拖板(下拖板)尺寸: 14516050⨯⨯ =Y W 3214516050107.81090--⨯⨯⨯⨯⨯≈N上导轨座(连电机)重量:223(2201403821558)7.81010 1.110107π--⨯⨯+⨯⨯⨯⨯⨯⨯+⨯≈()N夹具及工件重量:约150N 。
X-Y 工作台运动部分的总重量:约437N 。
3.2、滚动导轨副的计算与选择根据给定的工作台运动部件的总重量及负载和估算的 X W 和 Y W 计算导轨的静安全系数SL f =C0/P ,式中:C0为导轨的基本静额定载荷KN ;工作载荷 P=0.5(Z F +W);SL f =1.0~3.0(一般运行状况),3.0~5.0(运动时受冲击、振动)。
根据计算结果查有关资料初选导轨:因系统受中等冲击,因此取4.0sL f =,()N F z 437287150=+=,,,0.5()O SL X YX Y Z X Y C f P P F W ==+()()()()()()()()N P f C N P f C N W F P N W F P Y SL OY X sl OX Y Z Y X Z X 10545.263410545.26345.263904375.05.05.263904375.05.0=⨯===⨯===+=+==+=+=根据计算额定静载荷初选导轨:⑴、导轨型式:圆形截面滚珠导轨 ⑵、导轨长度 ①上导轨(X 向)取动导轨长度 100B l = 动导轨行程 55l =支承导轨长度 155B L l l =+= ②下导轨(Y 向)50l = 100B l = 150L =选择导轨的型号:GTA16⑶、直线滚动轴承的选型 ①上导轨240()X G N =②下导轨的()N G Y 437=由于本系统负载相对较小,查表后得出LM10UUOP 型直线滚动轴承的额定动载荷为437N ,大于实际动负载;但考虑到经济性等因素最后选择LM16UUOP 型直线滚动轴承。
并采用双排两列4个直线滚动轴承来实现滑动平台的支撑。
⑷、滚动导轨刚度及预紧方法当工作台往复移动时,工作台压在两端滚动体上的压力会发生变化,受力大的滚动体变形大,受力小的滚动体变形小。
当导轨在位置Ⅰ时,两端滚动体受力相等,工作台保持水平;当导轨移动到位置Ⅱ或Ⅲ时,两端滚动体受力不相等,变形不一致,使工作台倾斜α角,由此造成误差。
此外,滚动体支承工作台,若工作台刚度差,则在自重和载荷作用下产生弹性变形,会使工作台下凹(有时还可能出现波浪形),影响导轨的精度。
3.3、滚珠丝杠的设计计算滚珠丝杠的负荷包括铣削力及运动部件的重量所引起的进给抗力。
应按铣削时的情况计算。
⑴、最大动负载Q 的计算H Q f P ω=查表得系数1f ω=,1H f =,寿命值66010nT L =查表得使用寿命时间T=15000h ,初选丝杠螺距t=4mm ,得丝杠转速()min 37545.110001000max r t V n =⨯==所以 5.337101500375606=⨯⨯=L X 向丝杠牵引力1.414x x P f G =当 ()f 当——当量摩擦系数1.4140.01240 3.39()N =⨯⨯=Y 向丝杠牵引力Y P =1.414当f Y G =1.414×0.01×437=6.18()N所以最大动负荷X 向 6.2039.3112253=⨯⨯⨯=x Q ()N Y 向 Y Q =3225×1×1⨯6.18=37.60()N查表,取滚珠丝杠公称直径 010d mm =,选用滚珠丝杠螺母副的型号为 SFK1004,其额定动载荷为390N ,足够用。
⑵、滚珠丝杠螺母副几何参数计算表3-1 滚珠丝杠螺母副几何参数⑶、传动效率计算7.260.973()(7.260.2)tg tg tg tg γηγϕ===++式中:ϕ——摩擦角;γ——丝杠螺纹升角。
⑷、刚度验算滚珠丝杠受工作负载P 引起的导程0L 的变化量EFPL L 01±=∆ Y 向所受牵引力大,故应用Y 向参数计算()N P Q Y 76.30== 00.4()L cm =6220.610(/)E N cm =⨯ ()材料为钢()2220.7983.140.52F R cm π⎛⎫=== ⎪⎝⎭所以()cm L 661108.15.0106.205.060.37-⨯±=⨯⨯⨯±=∆ 丝杠因受扭矩而引起的导程变化量1L ∆很小,可以忽略。
所以导程总误差()um L L 8.44.0100108.1100601=⨯=∆=∆- 查表知E 级精度的丝杠允许误差15m μ,故刚度足够。
⑸、稳定性验算由于丝杠两端采用止推轴承,故不需要稳定性验算。
3.4、步进电机的选用⑴、步进电机的步距角b θ取系统脉冲当量0.01/p mm stepδ=,初选步进电机步距角 1.5b θ=。
⑵、步进电机启动力矩的计算设步进电机等效负载力矩为T ,负载力为P ,根据能量守恒原理,电机所做的功与负载力做功有如下关系T Ps ϕη=式中:ϕ ——电机转角;s ——移动部件的相应位移;η ——机械传动效率。
若取 b ϕθ=,则p s δ=,且S P P G μ=+,所以()()Nm uG P T b S S ηπθδ236+=式中:S P ——移动部件负载(N );G ——移动部件重量(N ); z P ——与重量方向一致的作用在移动部件上的负载力(N );μ ——导轨摩擦系数;b θ——步进电机步距角,(rad );T ——电机轴负载力矩(Nm )本例中,取0.03μ=(淬火钢滚珠导轨的摩擦系数),0.96η=,S P 为丝杠牵引力,N P P H s 7.24==。
考虑到重力影响,Y 向电机负载较大,因此取=G Y G =437N ,所以T =()()Nm 102.030.961.5243703.07.2401.0362-⨯=⨯⨯⨯+⨯π若不考虑启动时运动部件惯性的影响,则启动力矩0.3~0.5q TT =取安全系数为0.3,则 ()Nm T q 63.63.01003.22=⨯=- 对于工作方式为三相六拍的三相步进电机 ()Nm T T q j 67.7866.0max ==⑶、步进电机的最高工作频率()Hz V f F 250001.0605.11000601000max max =⨯⨯=δ 查表选用两个45BF005-Ⅱ型步进电机。
电机的有关参数见表3-2。
3.5、确定齿轮传动比因步进电机步距角 1.5b θ=,滚珠丝杠螺距 4t mm =,要实现脉冲当量0.01/p mm stepδ=,在传动系统中应加一对齿轮降速传动。