通力电梯调试(V3F1825)
通力电梯V3f25调试指南
V3f25调试指南一:概要调试指南仅用于v3f25驱动模块 713990REV2.0该驱动模块在出厂前已经过测试,并预设基本调节1.1安全与健康强制规定注释遵守您所在国家的电梯安全法规如本指南与您所在国家的电梯安全法规冲突时,以后者为准必须极其小心地操作电气部件和外罩 V3f25的主电路电容和逆变板,安全回路,控制内都有高电压关闭主电源后至少等5分钟才能测量v3f25内部和马达接线箱逆娈板的Led danger灯亮表示 v3f25内仍有高压存在,即关闭主电源,照明,风扃,插座及其相关线路仍有 220v电压。
1.2 工具数字万用表/测试法码1.3 参考资料am-1.1.30-b tc04807wl-en.tc04807w2-en so-11.65.09-6 as-11.65.01-a as-11.65.08-a1.4 操作界面: Lce 软件必须是3.3 相当于(chinaMAX1.4) 或以上版本,V3f25参数在Lce菜单6中,其操作方法与其它菜单相似,更改Lce菜单6中参数必须在Rdf模式下进行,读取或更改完菜单6的参数后记隹退出菜单6。
更改后就参数就起作用,但断电后丢失。
用菜单6-99永久保存参数。
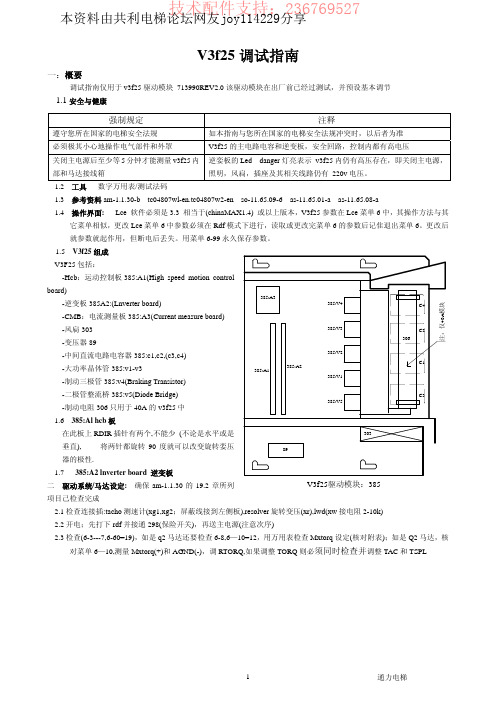
1.5 V3f25组成V3F25包括:-Hcb:运动控制板board)-逆变板385A2:(Lnverter board)-CMB:电流测量板385:A3(Current measure board)-风扃303-变压器89-中间直流电路电容器385:c1,c2,(c3,c4)-大功率晶体管385:v1-v3-制动三极管385:v4(Braking Transistor)-二极管整流桥385:v5(Diode Bridge)-制动电阻306只用于40A的v3f25中1.6 385:Al hcb板在此板上RDIR插针有两个,不能少(不论是水平或是垂直), 将两针都旋转90度就可以改变旋转娈压器的极性.1.7 385:A2 lnverter board 逆变板二驱动系统/马达设定:确保am-1.1.30的19.2章所列项目己检查完成2.1检查连接插:tacho测速计(xg1,xg2;屏蔽线接到左侧板),resolver旋转变压(xr),lwd(xw接电阻2-10k)2.2开电;先打下rdf并接通298(保险开关),再送主电源(注意次序)2.3检查(6-3---7,6-60=19),如是q2马达还要检查6-8,6—10=12,用万用表检查Mxtorq设定(核对附表);如是Q2马达,核对菜单6—10,测量Mxtorq(+)和AGND(-),调RTORQ,如果调整TORQ则必须同时检查并调整TAC和TSPL注:q1马达是一种新的mxl8马达型Array号,在马达铬牌上标为mxl8q22.4 tacho极性向上TPOL亮,否则调换XGl和XG2注意:rdir插针有两个,不能少(不管是水平还是垂直),将两插针都旋转90度就可以改变旋转变压器的极性.2.5 Resolve极性向上RPOL亮,否则将RDIR跳线转90度.注:以下(2.x)和(2.y)并非出自AM-11.65.15原文,而是参照FL-Il.65.20(2.x) 385:A3cmb板平衡调节,务必按以下次序:(a) 调p1,使U与CMB板上的AGND之间电压为0mv(+/-0.1mv);(b) 调p2,使W与CMB板上的AOND之间电压为0mv(+/-0.1mv);(c) 调p3,使v与CMB板上的AGND之间电压为Omv(+/-O.1mv)(2.y) 385:AIHCB板三相平衡调节,先短接UREF2:(a) 调RTR,使TTR与HCB板上的AGND电压为Omv(+/-0.5mv);(b) 调RTS,使TTS与HCB板上的AGND电压为0mv(+/-0.5mv);(c) 调RTT,使TTT与HCB板上的(d) 取走UREF2的短接线2.6 检查LWD;调LWD和LWDF使2.7 调整Resolver旋转变压器角度;旋转变压器角度自动调整介绍:有关,小化(对应于所需的马达转矩).调整过程是半自动的:-在钢丝绳未安装时通过RDF确保测速计(Tacho)和旋转变压器号已调整.-无论何时都要确保安全:钮中断调整,中断后只能从头开始-操作者自己决定方向-V3f25决定何时停止两次成功的RDF运行(v3f25运行是v3F25驱动马达旋转1.4HBC板上有一个蜂鸣器:-如果旋转变压器是零度(表示末调过),你能听到每隔15秒有四短音-在调整时你能听到两重蜂鸣响声-上行时,每隔一秒有四短音-下行时,每隔一秒有两短音-一长两短音表示有故障,可能的原因是;你按RDF按钮手指松开了,或安全回路断开了,那么只有从头开始调整注意:有一种特殊情况v3f25无法找到角度:如果你偿试了5次以上,每次刚启动就停住,那你就必须调换马达的U,V接线然后重新开始调整-在这种隋况下,你能听到一长三短的蜂鸣.(2.71)未安装钢丝绳:马达第一次运行,检查没有任何物件在曳引轮上.a) 确保制动器已经调好,检查RDF开关已打下.2.72己安装钢丝绳a) 打下rdf开关,确保井道有足够的运行空间让马达转两圈.b) 检查xw插已接好,监时调节lwd(参看2.8)使5-1的载重显示与轿厢载荷相对应.c) 轿厢装入大约25-35%或65-75%的荷载(不能是空载或满载).Mxl8曳引机没有装制动电路,松制动器要小心,不能让溜车速度太快.此时不允许有人在井道!d) 短时松开制动器一下,检查tpol和rpol灯,上行都亮,下行都不亮.e) 如果轿厢向下溜,依照(2.71),即先上后下运行两遍.f) 如果轿厢向上溜,依照(2.71),但要先下后上(记住:总是先向重的方向运行).最后检查6-62,如果等于0度,表示自动检测不成功,重做;如果是1-360度,则用6-99保存.2.8临时调lwd注意: 安装进度在此时应装好钢丝绳,V3f25可以驱动轿厢运行.以下的1wd调整是基于下述情况.对重已装入大约40%的对重块,轿厢的装璜尚未安装.轿厢与对重大至平衡,但轿厢必须比对重重一点.a) 电气调整前必须先调整1wd机械安装.b) 连接1wd插头,代替临时插头.屏蔽线接到驱动模块左边的金属板上.Mxl8曳引机没有装备动态的制动电路,松制动器要十分小心,不能让溜车速度太快.c) 轿厢空载,短时松开制动器一下,确认电梯向下溜,轿厢比对重重一点.d) 轿厢空载,调节hcb的1wde(offset)至5-1菜单显示0%载荷.e) 轿厢空载,调节hcb的1wdf(gain)至5-l菜单显示50%载荷f) 卸掉半载(轿厢空载),调节hcb的1wde(offset)至5-1菜单显示50%载(因为此时轿厢与对重大致平衡).注意:如果实际情况与上述的不同,则调整称重不但要考虑轿内载荷,还要考虑轿厢与对重的平衡情况根据安装手册继续余下的工作.3 快车调试3.1细调lwda) 空载时,检查轿厢和轿底1wd的安装.b) 电压表一极接1wd(+),一极接agnd(-)c) 轿厢空载,调1wed至1.0v(+/-0.0lv),而且菜单5-1显示00d) 50%载荷:调1wdf至2.5v(+/-0.0lv),而且菜单5-1显示50.e) 打下rdf开关,拨出1wd插,检查lce菜单5-1的显示应低于-15%(如-20%)f) 如果菜单5-1的显示大于-15%(如-2%),应增大称重感应器到感应片之间的距离,并重调.参看E—lineMinlSpace安装手册12.10章节.3.2 SETUPa) 将rdf拉下,驱动电梯至底层或稍低一点.检查lcecpu板上30,61:u,77:n,?7:s灯亮.b) 技菜单5-2-l,蜂鸣响起:间歇的长音.rdf打上,电梯自动慢速向上.c) 如果电梯中途停下,会显示故障代码(111---116)d) 如果setup成功,将显示顶层楼楼层,电梯从Setup运行模式进入正常运行模式.3.3 测量马达力矩3.3.1平衡系数:a) 轿厢50%载荷,从底层向顶层快速运行,到达顶层后拉下rdf,记下6-71(马达力矩)读数(不带符号).b) 打上Rdf,从顶层向底层快速运行,到达底层后拉下rdf,记下6-71(马达力矩)读数(不带符号).c) 两次读数应很接近,两者的差(上减下)就是Balance error(平衡误差),该差值x额定载重量=??kg,就是半载轿厢与对重的重量差.d) 如果上行读数大,应增加对重的重量.c) 如果下行读数大,应减小对重的重量.f) 如果改变了对重的重量,则重新比较读数.3.3.2检查驱动参数:空车向上全程运行,到顶层停车后拉下rdf,检查6-71(马达力矩),不应小于0.6.空车向上全程运行,到顶层停车后拉下rdf检查6-71(马达力矩),不应小于1.2.否则应重复步骤(2.3),某些参数或电位器可能设置不对.细调和测试本章包含下列主题:舒适感,运行效率,停层精度,曳引试验和缓冲器试验.并不意味着每一台电梯都要一页一页地,系统地执行本章所有内容,如果你在上述某个主题有问题,只需根据相关主题的步骤执行.4.1舒适感:注意:本章所有参数都对电梯舒适感有影响,能达到的最好效果需要综合所有参数来调试.某些参数调好后不需要再调.同时,机械部分必须正确安装(导轨,平衡系数,轿厢及隔震,导靴)4.1.1震动a) 制动器调节:制动器衬垫不得与制动轮摩擦.b) 细调Resolver角度(Q2马达不需要做):电梯开到顶层,每2度增大或减少菜单6—22的值(<+/-20度),快车乘坐感觉尤其注意加减速过程.总是从同一层向下测试,用菜单6-99保存,并记录在移交文件里以便更换HCB板时需要.c) 速度控制:减小p或增大i能减轻可能的震动,但同时使干层精度变差.6-1(p Factor)=2.5,以0.5逐次减小,细调时用更小步.6-2l(I Factor)=0.1s,以0.1逐次增大.细调时用更小步.用菜单6-99保存d) 如轿厢有高频振动,可增大Tacho软件滤波时间Tacho filter time(6-32=15ms),用菜单保存.4.1.2 启动空车下行检查马达开始转动时制动器应先打开.可调整启动延时Start delay(6-33,默认值4CDH-0.3秒),不应太大,以免影响电梯的效率,用菜单6-99保存.回溜或很“冲”: 调之前Setup应以做好,因为驱动系统必须知道井道楼层位置数据.a) 首先检查电梯的平衡系数.b) 再检查称重信号,如需要重新调整1wd.c) 轿厢半载.d) 记下6-33启动延时值,将其暂时改为1秒.e) 记下6-1 p factor的值,如大于1.5将其暂时改为1.5.f) 在井道中部,调整6-24 Balance error(平衡偏差-0.2---0.2,每次改变0.02)直至rdf在两个方向启动都好,用菜单6-99保存.s) 在底层,检查6-26 Rope weight(钢丝绳重量),如有补偿链=0,如没有=3.0,每次改变0.5使慢车上行无回溜,如上行有回溜则调大,用菜单6-99保存.h) 使轿厢空载.在底层慢车上行调6-23(start torque scaling,默认值=1.00),每次改变0.05使慢车上行无回溜,均从底层启动,每次间隔10秒以确保启动LWD信号稳定.调好后用菜单6-99保存.i) 在顶层下行调6-27(cai-cable weight随行电缆重量,默认值=0),每次改变0.5.均从项层启每次间隔10秒以确保启动时LWD信号稳定,调好后用菜单6-99保存.j) 恢复6-1 P factor和6-33 Start delay原值,用菜单6-99保存.4 .1.3平层停车最后爬行距离(时间)调节,6-28(Final jerk distance)=125mm,减小6-28使平层更有效率,增大使平层更平滑.4.2电梯运行效率4.2.1 加速度参数(仅在必要时才更改,加速度影响77:U/N的位置)4.2.2 最后爬行距离(时间),6-28(Final jerk distance)=125mm,没有提前开门时4.3 平层精度4.3.1 正常运行的平层精度(注意调节参数P过大或I参数过小可能会引起振动)a) KTW/Q参数:默认值2.8,如果额定载重大(超过(1000kg)可调节参数最大至3.5,每次改变后都检查平层精度,同样用6-99保存,KTW/Q=(轿厢+吊架+门机构+装修+对重)的重量/额定载重.b) P(6-1)每次增加0.5,如细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) Final jerk distance(6-28)调整,参看4.1.34.3.2再平层精度(注意:调节参数P过大或I过小可能会引起振动)a) 如果只是个别楼层的再平层不好,先检查6l:u/n的重叠量.b) p(6-1)每次增加0.5,细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) 增加Relevelling correction distance(6-29).最后用菜单6-99保存.4.4曳引试验参看Mini Space安装手册中的空载曳引试验的125%的曳引试验及制动试验.a) 按菜单6-72(enable traction test)曳引测试=1,该功能放宽了速度监察,只对第一次运行有效.b) 根据安装手册进行测试.c) 如果马达不够力:1)记录下HCB板Mxtorq(+),AGND(-)之间的电压.2)调高0.5v(注意:不能趄过4.8V,如果马达转动不了,不应驱动马达超过2至3秒)3)重新进行测试4)如果马达仍不能动,再0.5V调高0.5V(注意:不能超过4.8v,如果马达转动不了,不应驱动马达超过2至3秒)5)重新进行测试6)测试完成,恢复你改动过Mxtorq电压.4.5缓冲器测试(满速冲击测试,仅在必要时才做)4.5.1对重缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门c)按6-73(缓冲器测试功能,只有效一次).d)打上RDF,按顶层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器有无损坏.4.5.2轿厢缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门.c) 按6-73(缓冲器测试功能,只有效一次).d) 打上RDF,按底层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器的无损坏.4.6马达电流测量测量HCB板上的(+)Meas和(-)Agnd之间的电压,Ivac=30A(如果驱动单元是40A)或lvac=60A(如果驱动单元80A)5故障排除5.1 V3f25故障代码:参看E—line Mini Space安装手册,在逆变板(1nverter board)上有三个红色LED灯,分别表示电流过大(SCL),制动电阻故障(BRSL),中间直流电压监察(DCL),同时在LCECPU板上显示故障代码5.2平层感应器:30,61u/n感应器之间必须装隔离片.5.3 HCB板复位:如果HCB板根本不工作且持续复位(你会听到蜂鸣报警),检查RESLOVER连线和接头.5.4 Reslover角度:当出现以下情况时:a)轿厢和钢丝绳已经装好.b)轿厢空载,对重被支撑着,因此松闸时对重不能被提起.c)Resslover角度未调.你可能无法移走对重下的支撑架,在这种情况下,有两重方法可以试一试(此时不允许有人在井道工作):a) 使用6-70自动检测角度,向下开动.b) 从360度开始,每隔30度试角度,向下开动.直到能提起对重,移走支撑架.然后依照2.7自动检测geslover角度.5.5更换HCB(参看AS-11.65.1)a) 用菜单6-62记下旧板的旋转变压器的角度,关电换新板.b) 设置6-62为0并按6-98(电梯处于RDF模式,停于底层)设置默认参数.c) 根据现场电梯规格调节菜单6-3至6-7.(对于q2马达,调节6-3至6-8,6-60=12)d) 设置6-62为旧的旋转变压器角度,按6-99保存.c) 核对列表数据(对于q2马达,核对6-10)检查Mxtorq电压(+/-0.01V),调rtorq.f) 调节TAC电压等于6-11(37.3mm)或6-12(75mm):拔下XC/l-2,将S5跳线从2-3移至l-2位置,测量TAC(+)和AGND(-),调节Tacho电位器,误差+/-0.01,调好后恢复S5和XG.g)调节TSPL电压等于6-13所示值(+/-0.01v),测量TAPL+和ANGD-,调节RSPL.h)调节LEDi)做SETUP5.6 TAC和TSPL电压计算参看英文原版(AM-11.65.15),(0%=1v,20%=1.6v,50=%2.5v,100%=4v,110%=4.3v)附录1:Lce菜单6中的v3f25参数(图号:713983)识别号与菜单6一至菜单6 单位范围默认值工厂设定现场设定参数组文档识别号=本表格6-0 2000--- 2000 2000 2000电梯参数注意!首先检查这些参数和6-60(*)P增益6-1 S/m 0.0---15.9 2.5 2.5加速度6-2 m/s2 0.6---1.0 0.8 0.8r额定速度6-3 m/s 1.00---2.50 2.50d额定载重量6-4 Kg 400 1800 630电流感应比例(40A是1,80A是2) 6-5 1---2 2r曳引轮直径6-6 mm 600---750650绳比6-7 1---2---3 2额定力矩电流(1800Nm) 6-8 Amp 5.0---99.9Q2马达注:曳引轮直径和绳比决定了速度控制器里旋转变压器的比例,它们同时也用于计算电梯的额定力矩电位器调节,注:这些参数由v3f25计算,是只读参数识别号与菜单6一至菜单6 单位范围默认值工厂设定现场设定0.000—5.000---VMXTORQ 6-10测试电压(直径=37.7mm) 6-11 V 2.350—7.500---测试电压(直径=75mm) 6-12 V 2.350—7.500 2.431对应于0.3m/s的速度限制电压6-13 V 0.150—5.0000.540微调参数识别号与菜单6一至菜单6 单位范围默认值工厂设定检修或RDF速度6-20 m/s 0.3 0.5 0.3 0.3I 参数6-21 sec 0.05---1.00 0.20 0.20速度降低比=降低的速度/额定速度6-22 0.03---1.00 1.00 1.00 Start torque scaling启动力矩比例6-23 0.50---1.10 1.00 1.00 Balance error (平衡误差) 6-24 -0.30---0.30 0.00 0.00 KTW/Q factor 6-25 0.4---7.0 2.8 2.8Rope weight钢丝绳重量6-26 Kg/m-2.0---7.0 0.0Car cable weight随行电缆重量6-27 Kg/m0.00---5.00 0.00 0.00 Final jerk distance最后爬行距离6-28 mm 0---250 125 125e再平层校正距离6-29 mm 0---20 0 0 Tacho scaling factor测速记比例系数6-30 0.400---0.900 0.900 0.900 Tacho fault counter测速记故障计数6-31 0---10 0 0 Tacho filer time测速记滤波时间6-32 ms 0---40 15 15 Start delay启动延时6-33 sec 0.10---1.00 0.30 0.30曳引机参数识别号与菜单6一至菜单6 单位范围默认值工厂设定现场设定马达极对数 (*) 6-60 12---19 19Nm 1800 1800 1800 1800 曳引机力矩mx18=1800Nm 6-61旋转变压器角度6-62 ele 0---360 0 0调试和试验识别号与菜单6一至菜单6 单位范围默认值工厂设定旋转变压器角度自动调整6-70 0---1 0 0马达力矩测量6-71 -1.500---1.500 0 0 Enable traction test曳引试验6-72 0---1 0 0 Enable buffer test缓冲器试验6-73 0---1 0 0注:曳引试验和缓冲试验只一次有效PERMANENT STORE: 永久保存Default parameters 默认参数6-98 0---1 0 0 Save 永久保存参数6-99 0---1 0 0要恢复默认参数,将6-62改为0,再将6-98改为1,然后断电V3F18/V3F25M parmeter factory and site setting table附录2: Mx18-/v3f25规格表pully Mxtorpvoltage Speed Tsp Roping Drive TachoG Xx LoadG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压M/S mm A mm V KGG 9 630 1 650 1:1 40 37.7 1.09G 1 630 1 750 1:1 40 37.7 1.26G 18 800 1 650 1:1 40 37.7 1.40G 2 800 1 750 1:1 40 37.7 1.62G 3 1000 1 650 1:1 40 37.7 2.12G 4 1000 1 750 1:1 40 37.7 2.48voltage G Xx Loadpully MxtorpSpeed Tsp Roping Drive TachoG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压M/S mm A mm V KGG 19 630 1.6 650 1:1 40 37.7 1.65G 5 630 1.6 750 1:1 40 37.7 1.91G 59 800 1.6 650 1:1 40 37.7 2.12G 6 800 1.6 750 1:1 40 37.7 2.45G 7 1000 1.6 650 1:1 40 37.7 3.15G 8 1000 1.6 750 1:1 40 37.7 3.12G 64 630 2 650 1:1 40 37.7 2.80G 10 630 2 750 1:1 40 37.7 2.76G 69 800 2 650 1:1 40 37.7 3.58G 11 800 2 750 1:1 40 37.7 3.54G 12 1000 2 650 1:1 40 37.7 2.26G 13 1000 2 750 1:1 40 37.7 2.25G 90 630 2.5 650 1:1 40 37.7 2.8037.7 14 630 2.5 750 1:1 40 37.7 2.76G 91 800 2.5 650 1:1 40 37.7 3.58G 15 800 2.5 750 1:1 40 37.7 3.54G 16 1000 2.5 650 1:1 80 37.7 2.26G 17 1000 2.5 750 1:1 80 37.7 2.25G 20 630 1 650 2:1 40 37.7 1.04G 21 800 1 650 2:1 40 37.7 1.31G 29 800 1 750 2:1 40 37.7 1.50G 22 1000 1 650 2:1 40 37.7 1.64G 39 1000 1 750 2:1 40 37.7 1.89G 23 1350 1 650 2:1 40 37.7 2.22G 24 1350 1 750 2:1 40 37.7 2.75G 25 1600 1 650 2:1 40 37.7 3.22G 26 1600 1 750 2:1 40 37.7 3.08G 27 1800 1 650 2:1 40 37.7 3.65G 28 1800 1 690 2:1 40 37.7 3.88G 30 630 1.6 650 2:1 40 75G 31 800 1.6 650 2:1 40 75 1.82G 49 800 1.6 750 2:1 40 75 2.29G 32 1000 1.6 650 2:1 40 75 2.61G 79 1000 1.6 750 2:1 40 75 2.85G 33 1350 1.6 650 2:1 40 75 2.73G 34 1350 1.6 750 2:1 40 75 3.86voltagepully MxtorpG Xx LoadSpeed Tsp Roping Drive TachoG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压KGM/S mm A mm VG 35 1600 1.6 650 2:1 80 75 4.44G 36 1600 1.6 750 2:1 80 75 2.65 2.30G 37 1800 1.6 650 2:1 80 75 2.60G 38 1800 1.6 690 2:1 80 75 2.76G 40 630 2 650 2:1 40 75 2.33G 41 800 2 650 2:1 40 75 2.92G 42 1000 2 650 2:1 40 75 3.61G 43 1350 2 650 2:1 80 75 2.45G 44 1350 2 750 2:1 80 75 2.80G 45 1600 2 650 2:1 80 75 2.90G 46 1600 2 750 2:1 80 75 3.34G 47 1800 2 650 2:1 80 75 3.28G 48 1800 2 659 2:1 80 75 3.48G 50 630 2.5 650 2:1 40 75 2.73G 51 800 2.5 650 2:1 40 75 3.41G 52 1000 2.5 650 2:1 80 75 2.11G 53 1350 2.5 650 2:1 80 75 2.84G 54 1350 2.5 750 2:1 80 75 3.24G 55 1600 2.5 650 2:1 80 75 3.92G 56 1600 2.5 750 2:1 80 75 3.86G 57 1800 2.5 650 2:1 80 75 4.42G 58 1800 2.5 690 2:1 80 75 4.02G 65 630 1.75 750 1:1 40 37.3 1.91G 66 800 1.75 750 1:1 40 37.3 2.46G 67 1000 1.75 650 1:1 40 37.3 3.16G 68 1000 1.75 750 1:1 40 37.3 3.67G 70 630 1.25 650 2:1 40 37.3 1.28G 71 800 1.25 650 2:1 40 37.3 1. 6 1G 72 1000 1.25 650 2:1 40 37.3 2.0118G 73 1350 1.25 650 2:1 40 37.3 3.G 74 1350 1.25 750 2:1 40 37.3 3.15G 75 1600 1.25 650 2:1 40 37.3 3.79G 76 1600 1.25 750 2:1 40 37.3 3.76G 77 1800 1.25 650 2:1 40 37.3 4.28G 78 1800 1.25 690 2:1 40 37.3 4.55voltagepully MxtorpSpeed Tsp Roping Drive TachoG Xx LoadG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压M/S mm A mm V KGG 80 630 1.75 650 2:1 40 75 1.84G 81 800 1.75 650 2:1 40 75 2.30G 82 1000 1.75 650 2:1 40 75 2.87G 83 1350 1.75 650 2:1 80 75 2.43G 84 1350 1.75 750 2:1 80 75 2.23G 85 1600 1.75 650 2:1 80 75 2.88G 86 1600 1.75 750 2:1 80 75 2.51G 87 1800 1.75 650 2:1 80 75 3.26G 88 1800 1.75 690 2:1 80 75 3.46附录3: 蜂鸣代号(*):一短音 (-):一长音 ( ):停顿约1秒 (q):停顿约15秒 (m):停顿约60秒 (---):不间断蜂鸣编号警告内容蜂鸣代号1 驱动模块过热(-*-*m )2 马达过热(-*m )3 旋转变压器角度为零(未调整) (****q)4 旋转变压器角度自动调整:上行(****)5 旋转变压器角度自动调整:下行(** )6 旋转变压器角度自动调整过程出错(-** )7 无发找出旋转变压器角度,需调换马达U/V接线(-*** )8 没有做SETUP(井道设定) (*-*m )9 SETUP(井道设定)指令处于有效状态( - )10 在STUP过程中V3F25检查到井道设备有错(-****q)11 NTS错误:V3F25在正常模式下曾开始减速(***q )12 参数已被改变(* q )13 V3F25位置错误(*- )14 缓冲器和曳引测试(-----)。
巨人通力某电梯调试全参数(2019最新)
巨人通力电梯调试资料E1故障历史记录显示最近的故障情况E2清除故障记录重置故障记录,清除内存菜单子菜单功能注d驱动故障参看故障代码表菜单子菜单功能注代码含义(斜体表示默认侄)必备11主楼层选择主楼层(1)楼层号12控制方式集选方式选择:1=SBC单按钮控制:2=DC下集选:3=FC 全集选:4=PB按钮控制门系统110开门时间相应普通楼层的内指信号时,从门完全打开至开始关门时的时间(5S)单位秒(1--60)111重新开门时间重开门后,从门完全打开至重新开始关门的时间(20)单位0.1秒(1—99)112激活ADO激活提前开门功能0=关闭:1=激活113强迫关门如果在一段选定的时间内关门受阻,门将以较慢的速度响蜂鸣关门,此时,只有关门力限制器起作用,强迫关门持续到关门结束,0=关闭;1=有效;2=NUD114强迫关门时间限制设置开始强迫关门的时间(20)单位秒(1--60)115新内指登记快速关门开门或门已打开时,按下按钮可以缩短开门时间单位0。
1秒。
0=无该功能(0-99)116光眼延时设置光眼被挡到重新关门的时间(0-99)20单位0。
1秒。
=无该功能(0-99)117光眼正常快速关门设置光眼正常后快速关门0=无1=有118禁止同时开门A门和B门的开门及同时开门功能1=A门优先;2=B 门优先3=同时119对穿门轿厢选用对穿门轿厢0=一个门;1=对穿门120门终鸣器为盲人选择门终鸣器0=关;1=门完全打开时响121延长开门时间LCECOS的输入XC(34:E)的类型0=按钮(DOEB);1=开关带蜂鸣器(DOES);2=开关不带蜂鸣器(DOES);122DOP类型选择DOP类型0=none;1=DOP CS泊梯130泊梯楼层如1-33=2(群组泊梯)1#梯此菜单选择的楼层是第一泊梯楼层(PAM)2#梯此菜单选择的楼层是第二泊梯楼层(PAS)3#梯此菜单应0,0=0FF,nn=楼层号131泊梯时开门泊梯时A门与B门的开关情况0=关,1=A门优先,2=B 门优先,3=AB门同时开132泊梯时间选择电梯在开始泊梯前的空闲时间(30)(1-99)秒133泊梯模式选择单台或群组泊梯0=关,1=单梯,2=群组泊梯134自动从特定楼层派遣电梯空闲电梯将离开此楼层(ADF)功能0=关,nn=指定楼层135自动返回特定楼层(ADF)功能将电梯开往此楼层0=回主楼层,nn=指定楼层内指140允许反向内选允许登陆与电梯运行方向相反的内指信号,一旦停梯使这些信号开始响应0=关,1=开,141错误内选删除电梯连续完成两个内指而无人出入轿厢的情况下删除所有内指信号0=关,1=开142内选登记蜂鸣器当内选按亮(登记)时发出一短促声音0=关,1=开143忽略新外呼为响应运时的外呼而忽略新外呼0=关,1=开144司机模式选择0:标准1:ATS HK/ 2:ATS CS145锁的类型(楼层进出控制)指定LCEOPT的锁输入信号-锁-的用法0=关,1:锁内选,2:锁外呼,3:锁内选和外呼146优先下呼1。
通力电梯调试资料
通力电梯调试资料菜单子菜单功能注E1故障历史记录显示最近的故障情况E2清除故障记录重置故障记录,清除内存菜单子菜单功能注d驱动故障参看故障代码表菜单子菜单功能注代码含义(斜体表示默认侄)必备11主楼层选择主楼层(1)楼层号12控制方式集选方式选择:1=SBC单按钮控制:2=DC下集选:3=FC全集选:4=PB按钮控制门系统 110开门时间相应普通楼层的内指信号时,从门完全打开至开始关门时的时间(5S)单位秒(1--60)111重新开门时间重开门后,从门完全打开至重新开始关门的时间(20)单位 0.1秒(1—99) 112激活ADO激活提前开门功能0=关闭:1=激活113强迫关门如果在一段选定的时间内关门受阻,门将以较慢的速度响蜂鸣关门,此时,只有关门力限制器起作用,强迫关门持续到关门结束,0=关闭;1=有效;2=NUD114强迫关门时间限制设置开始强迫关门的时间(20)单位秒(1--60)115新内指登记快速关门开门或门已打开时,按下按钮可以缩短开门时间单位 0。
1秒。
0=无该功能(0-99)116光眼延时设置光眼被挡到重新关门的时间(0-99)20单位 0。
1秒。
=无该功能(0-99)117光眼正常快速关门设置光眼正常后快速关门0=无1=有118禁止同时开门A门和B门的开门及同时开门功能1=A门优先;2=B门优先3=同时119对穿门轿厢选用对穿门轿厢0=一个门;1=对穿门120门终鸣器为盲人选择门终鸣器0=关;1=门完全打开时响121延长开门时间LCECOS的输入XC(34:E)的类型0=按钮(DOEB);1=开关带蜂鸣器(DOES);2=开关不带蜂鸣器(DOES);122DOP类型选择DOP类型0=none;1=DOP CS泊梯130泊梯楼层如1-33=2(群组泊梯)1#梯此菜单选择的楼层是第一泊梯楼层(PAM)2#梯此菜单选择的楼层是第二泊梯楼层(PAS)3#梯此菜单应0,0=0FF,nn=楼层号131泊梯时开门泊梯时A门与B门的开关情况0=关,1=A门优先,2=B门优先,3=AB门同时开132泊梯时间选择电梯在开始泊梯前的空闲时间(30)(1-99)秒133泊梯模式选择单台或群组泊梯0=关,1=单梯,2=群组泊梯134自动从特定楼层派遣电梯空闲电梯将离开此楼层(ADF)功能0=关,nn=指定楼层135自动返回特定楼层(ADF)功能将电梯开往此楼层0=回主楼层,nn=指定楼层内指140允许反向内选允许登陆与电梯运行方向相反的内指信号,一旦停梯使这些信号开始响应0=关,1=开,141错误内选删除电梯连续完成两个内指而无人出入轿厢的情况下删除所有内指信号0=关,1=开142内选登记蜂鸣器当内选按亮(登记)时发出一短促声音0=关,1=开143忽略新外呼为响应运时的外呼而忽略新外呼0=关,1=开144司机模式选择0:标准 1:ATS HK/ 2:ATS CS145锁的类型(楼层进出控制)指定LCEOPT的锁输入信号-锁-的用法0=关,1:锁内选,2:锁外呼,3:锁内选和外呼146优先下呼1。
通力电梯变频器现场调试设置步骤

通力电梯变频器现场调试设置步骤通力电梯变频器现场调试设置步骤变频器:KDL32原因:变频器主板损坏,无法维修,更换新板,无参数,需重新调试。
过程:1.由于是3台群控,型号一样,参数参照旁边的一台即可。
2.进入菜单6,6菜单是变频器菜单,并且只需进6菜单,因为其它功能没变,均正常。
3.事先将旁边无故障电梯的6菜单参数全部抄录。
4.将新板安装完毕,送电,机房打检修,观察主控板(LCECPU 板)指示灯V3FOK,如果正常点亮,证明新变频器主板工作正常,如果不能点亮,要么是新板版本不对,要么主板或外围有问题。
5.进入6菜单。
6-0检查版本是否与原先吻合。
进入6-95,将值设为0,意思是参数锁定取消,如果不设为0,将不能输入重要参数,如电机参数和型号。
6.进入6-98,设为1。
(默认参数)7.进入6-60。
选择马达类型。
这一步很重要,我是直接用旁边电梯的参数,所以直接输入14,我的类型是14,如果没有其它电梯参数的参考,可以查看电机的名牌,根据名牌上的类型输入即可。
类型输入之后,剩下的6-6、6-33、6-61、6-63、6-64、6-65、6-66、6-67的参数将被自动设定。
8.从6-1开始,把旁边电梯的参数照着输入即可,并检查上面提到的电机参数。
9.在输入到6-62的时候(力矩补偿角度),请注意这个参数不能参照其它电梯参数,因为这个参数是需要学习的,没学习之前,一定要设为0。
10.参数6-63(旋转变压器速度和极性)、6-65(编码器类型和极性),这两个参数可以跟旁边电梯一致,直接设为一样即可,无需判断,因为这些都没有变动。
11.所有参数设定之后,进入6-99(保存参数),将值设为1,设完之后,该值自动恢复为0。
12.为了保证角度学习顺利通过,在角度学习之前,一定要查看旋转变压器(测速发电机)的角度是否与旋转方向一直(6-63)。
13.进入6-75(这个菜单有很多功能,可以观察很多参数,详情请自行查找资料,没有的话请回帖索要)。
V3F1825(S)通力调试培训课程-推荐下载

通力电梯产品调试技能培训——驱动系统V3F18/25介绍及调试目录1 教材的有效性------------------------------------------------22 电气安全----------------------------------------------------23 驱动介绍--------------------------------------------------- 23.1 V3F25(S)介绍------------------------------------------- 23.2 V3F18 介绍----------------------------------------------43.3 HCB 板介绍----------------------------------------------53.4逆变板385A:2 -------------------------------------------73.5 LED 指示介绍--------------------------------------------83.6 电流检测板----------------------------------------------94 调试前准备工作----------------------------------------------94.1 调试前的检查--------------------------------------------94.2 检查接线------------------------------------------------105 慢车调试----------------------------------------------------135.1 设置驱动型号---- ---------------------------------------135.2 设置驱动参数--------------------------------------------135.3 设置6- 38参数------------------------------------------145.4 调整测速计的测试电位计----------------------------------145.5 检查 MXTORQ---------------------------------------------155.6 检查旋转编码器的极性------------------------------------155.7 检查测速计极性------------------------------------------155.8 旋转编码器相角初始化------------------------------------156 快车调试----------------------------------------------------167 蜂鸣器报警--------------------------------------------------178 V3F18/25 参数表---------------------------------------------189 V3F25与V3F25S 的区别---------------------------------------1910 V3F25S 参数表-----------------------------------------------201 本教材的有效性本指导对HCB板781380G01/G02有效(参数6_0值必须2011/2013)。
巨人通力电梯调试参数
E1 故障历史记录显示最近的故障情况E2 清除故障记录重置故障记录,清除内存菜单子菜单功能注d 驱动故障参看故障代码表菜单子菜单功能注代码含义(斜体表示默认值)必备1-1 主楼层选择主楼层(1)楼层号1-2 控制方式集选方式选择:1=SBC 单按钮控制:2=DC 下集选:3=FC 全集选:4=PB 按钮控制门系统1-10 开门时间相应普通楼层的内指信号时,从门完全打开至开始关门时的时间(5S)单位秒(1--60)1-11 重新开门时间重开门后,从门完全打开至重新开始关门的时间(20)单位0.1 秒(1—99)1-12 激活ADO 激活提前开门功能0=关闭:1=激活1-13 强迫关门如果在一段选定的时间内关门受阻,门将以较慢的速度响蜂鸣关门,此时,只有关门力限制器起作用,强迫关门持续到关门结束,0=关闭;1=有效;2=NUD1-14 强迫关门时间限制设置开始强迫关门的时间(20)单位秒(1--60)1-15 新内指登记快速关门开门或门已打开时,按下按钮可以缩短开门时间单位0.1 秒。
0=无该功能(0-99)1-16 光眼延时设置光眼被挡到重新关门的时间(0-99)20 单位0.1 秒。
0=无该功能(0-99)1-17 光眼正常快速关门设置光眼正常后快速关门0=无1=有1-18 禁止同时开门A 门和B 门的开门及同时开门功能1=A 门优先;2=B门优先3=同时1-19 对穿门轿厢选用对穿门轿厢0=一个门;1=对穿门1-20 门终鸣器为盲人选择门终鸣器0=关;1=门完全打开时响1-21 延长开门时间LCECOS 的输入XC(34:E)的类型0=按钮(DOEB);1=开关带蜂鸣器(DOES);2=开关不带蜂鸣器(DOES);1-22 DOP 类型选择DOP 类型0=none;1=DOP CS泊梯1-30 泊梯楼层如1-33=2(群组泊梯)1#梯此菜单选择的楼层是第一泊梯楼层(PAM)2#梯此菜单选择的楼层是第二泊梯楼层(PAS)3#梯此菜单应0,0=0FF,nn=楼层号1-31 泊梯时开门泊梯时A 门与B 门的开关情况0=关,1=A 门优先,2=B门优先,3=AB 门同时开1-32 泊梯时间选择电梯在开始泊梯前的空闲时间(30)(1-99)秒1-33 泊梯模式选择单台或群组泊梯0=关,1=单梯,2=群组泊梯1-34 自动从特定楼层派遣电梯空闲电梯将离开此楼层(ADF)功能0=关,nn=指定楼层1-35 自动返回特定楼层(ADF)功能将电梯开往此楼层0=回主楼层,nn=指定楼层内指1-40 允许反向内选允许登陆与电梯运行方向相反的内指信号,一旦停梯使这些信号开始响应0=关,1=开,1-41 错误内选删除电梯连续完成两个内指而无人出入轿厢的情况下删除所有内指信号0=关,1=开1-42 内选登记蜂鸣器当内选按亮(登记)时发出一短促声音0=关,1=开1-43 忽略新外呼为响应运时的外呼而忽略新外呼0=关,1=开1-44 司机模式选择0:标准1:ATS HK/ 2:ATS CS1-45 锁的类型(楼层进出控制)指定LCEOPT 的锁输入信号-锁-的用法0=关,1:锁内选,2:锁外呼,3:锁内选和外呼1-46 优先下呼1。
通力驱动培训KONE_3000_V3F1825(S)

通力电梯产品调试技能培训——驱动系统 V3F18/25 介绍及调试TSG 中级目录1 2 3 教材的有效性------------------------------------------------2 电气安全----------------------------------------------------2 驱动介绍--------------------------------------------------- 2 3.1 V3F25(S)介绍------------------------------------------- 2 3.2 V3F18 介绍----------------------------------------------4 3.3 HCB 板介绍----------------------------------------------5 3.4 逆变板 385A:2 -------------------------------------------7 3.5 LED 指示介绍--------------------------------------------8 3.6 电流检测板----------------------------------------------9 4 调试前准备工作----------------------------------------------9 4.1 调试前的检查--------------------------------------------9 4.2 检查接线------------------------------------------------10 5 慢车调试----------------------------------------------------13 5.1 设置驱动型号---- ---------------------------------------13 5.2 设置驱动参数--------------------------------------------13 5.3 设置 6- 38 参数------------------------------------------14 5.4 调整测速计的测试电位计----------------------------------14 5.5 检查 MXTORQ---------------------------------------------15 5.6 检查旋转编码器的极性------------------------------------15 5.7 检查测速计极性------------------------------------------15 5.8 旋转编码器相角初始化------------------------------------15 6 快车调试----------------------------------------------------16 6.1 设置称重------------------------------------------------17 6.2 带 LCEVTC 称重板 称重的调整方法--------------------------17 6.3 作初始化运行(井道设定)----------------------------------18 6.4 测量马达转矩--------------------------------------------18 6.5 检查驱动调整--------------------------------------------19 7 舒适感调试--------------------------------------------------19 7.1 乘坐舒适性----------------------------------------------19 8 常见问题处理------------------------------------------------24 9 蜂鸣器报警--------------------------------------------------25 10 V3F18/25 参数表---------------------------------------------26 11 V3F25 与 V3F25S 的区别---------------------------------------27 12 V3F25S 参数表-----------------------------------------------28通力电梯有限公司1培训教材 仅供参考 不得外传通力电梯产品调试技能培训——驱动系统 V3F18/25 介绍及调试TSG 中级1 本教材的有效性本指导对 HCB 板 781380G01/G02 有效(参数 6_0 值必须2011/2013)。
巨人通力电梯调试全参数(精)
E1 故障历史记录显示最近的故障情况E2 清除故障记录重置故障记录,清除内存菜单子菜单功能注d 驱动故障参看故障代码表菜单子菜单功能注代码含义(斜体表示默认值必备1-1 主楼层选择主楼层(1楼层号1-2 控制方式集选方式选择:1=SBC 单按钮控制:2=DC 下集选:3=FC 全集选:4=PB 按钮控制门系统1-10 开门时间相应普通楼层的内指信号时,从门完全打开至开始关门时的时间(5S单位秒(1--601-11 重新开门时间重开门后,从门完全打开至重新开始关门的时间(20单位0.1 秒(1—991-12 激活ADO 激活提前开门功能0=关闭:1=激活1-13 强迫关门如果在一段选定的时间内关门受阻,门将以较慢的速度响蜂鸣关门,此时,只有关门力限制器起作用,强迫关门持续到关门结束,0=关闭;1=有效;2=NUD1-14 强迫关门时间限制设置开始强迫关门的时间(20单位秒(1--601-15 新内指登记快速关门开门或门已打开时,按下按钮可以缩短开门时间单位0.1 秒。
0=无该功能(0-991-16 光眼延时设置光眼被挡到重新关门的时间(0-9920 单位0.1 秒。
0=无该功能(0-991-17 光眼正常快速关门设置光眼正常后快速关门0=无1=有1-18 禁止同时开门A 门和B 门的开门及同时开门功能1=A 门优先;2=B门优先3=同时1-19 对穿门轿厢选用对穿门轿厢0=一个门;1=对穿门1-20 门终鸣器为盲人选择门终鸣器0=关;1=门完全打开时响1-21 延长开门时间LCECOS 的输入XC(34:E的类型0=按钮(DOEB;1=开关带蜂鸣器(DOES;2=开关不带蜂鸣器(DOES;1-22 DOP 类型选择DOP 类型0=none;1=DOP CS泊梯1-30 泊梯楼层如1-33=2(群组泊梯1#梯此菜单选择的楼层是第一泊梯楼层(PAM2#梯此菜单选择的楼层是第二泊梯楼层(PAS3#梯此菜单应0,0=0FF,nn=楼层号1-31 泊梯时开门泊梯时A 门与B 门的开关情况0=关,1=A 门优先,2=B门优先,3=AB 门同时开1-32 泊梯时间选择电梯在开始泊梯前的空闲时间(30(1-99秒1-33 泊梯模式选择单台或群组泊梯0=关,1=单梯,2=群组泊梯1-34 自动从特定楼层派遣电梯空闲电梯将离开此楼层(ADF功能0=关,nn=指定楼层1-35 自动返回特定楼层(ADF功能将电梯开往此楼层0=回主楼层,nn=指定楼层内指1-40 允许反向内选允许登陆与电梯运行方向相反的内指信号,一旦停梯使这些信号开始响应0=关,1=开,1-41 错误内选删除电梯连续完成两个内指而无人出入轿厢的情况下删除所有内指信号0=关,1=开1-42 内选登记蜂鸣器当内选按亮(登记时发出一短促声音0=关,1=开1-43 忽略新外呼为响应运时的外呼而忽略新外呼0=关,1=开1-44 司机模式选择0:标准1:ATS HK/ 2:ATS CS1-45 锁的类型(楼层进出控制指定LCEOPT 的锁输入信号-锁-的用法0=关,1:锁内选,2:锁外呼, 3:锁内选和外呼1-46 优先下呼1。
通力电梯调试资料

179锁梯模式得轿厢照明锁机OSS模式时关闭照明0=关; 1=开;
180主楼层时强制停梯电梯经过主楼层时必须停梯,以便保安人员检查轿内乘客0=不停;1=下行时停;2=上行时停;3=上下均停
181经过楼层时得信号响声提示乘客轿厢经过或停在某楼层0=关; 1=开;
消防159消防保留楼层用FID 6(udding)与FID M(achine room)时必须为0,0=nn
160消防楼层选择消防返回楼层(1)楼层号
161地区消防法规(0-17)选择各个国家得消防类型0=未用,1=德国。。。6=英国(正常)7=荷兰,8=英国(消防),10=瑞典,11=香港,12=澳洲,14=马来西亚,15=新加坡,16=印尼,17=亚太地区
FID AC+ FRD、13= FID AO+ FRD。
163消防返回楼层得开门侧选择A门或B门;1=A门;2=A+ B门;3=B+ A门;4= B门
164紧急供电返回楼层(EPD)选择紧急供电运行时得返回楼层(0-nn)0=下一个可能得楼层
165紧急返回后得门位置选择紧急返回后得A门与B门得开关情况0=门关;1=A门开;2= B门开;3=AB门均开
153外呼重新开门次数当轿厢有内选时外呼使门重得次数1=1次,2=多次,3=REOHK
154最低楼层选择最低楼层得楼层编号1—nn更改后须重划楼板FE3选项菜单1-30、34。59。64、89选择得非零值、否则将自动取此菜单值
155EMC(E—Link)得组号选择EMC(E—Link)得组号(croud number)(0) 0—31
132泊梯时间选择电梯在开始泊梯前得空闲时间(30)(1-99)秒
通力电梯调试

通力电梯调试引言通力电梯是现代建筑中不可或缺的设备之一。
在安装电梯后,为了确保其安全正常运行,通力电梯需要进行调试和测试。
本文档将介绍通力电梯调试的步骤和注意事项。
调试步骤步骤一:安全检查在进行电梯调试前,首先需要进行安全检查。
确保所有安全设备安装完好,并按照相关标准进行连接。
检查所有电气线路的连接是否牢固,并检查电梯底坑和顶层设备的安装是否牢固。
步骤二:电气系统调试1.打开电梯控制柜,检查电气系统的工作状态。
2.检查电气线路的连接是否正确,是否存在断路或短路的情况。
3.检查电梯主机和门机的电气系统是否正常工作。
4.检查电气系统的保护装置是否正常工作,如断电器、熔断器等。
步骤三:机械系统调试1.检查电梯轿厢和对重的平衡状态,调整平衡重。
2.检查轿厢门和对重门的闭合状态,调整门扇间隙。
3.检查电梯导轨的安装是否牢固,调整导轨对接度。
4.检查安全装置的工作状态,如门锁、限速器、缓冲器等。
步骤四:安全功能调试1.检查紧急停止开关的工作状态,测试其是否能够迅速停止电梯运行。
2.检查紧急通话装置的工作状态,测试其是否能正常与外界通讯。
3.检查应急照明系统和防爆门的工作状态,测试其是否能在断电情况下正常工作。
步骤五:运行调试1.将电梯置于运行状态,观察其运行是否平稳,是否存在异常噪音。
2.测试电梯的上行和下行功能,确保其正常运行。
3.测试电梯的开门和关门功能,观察门扇的运动是否顺畅。
4.检查电梯的楼层显示是否准确,测试按钮功能是否正常。
注意事项1.通力电梯调试需要由专业技术人员进行,确保其专业性和安全性。
2.调试过程中,需要关注电梯各部件的工作状态,及时处理发现的问题。
3.在调试过程中,必须遵守相关安全规范,并确保符合法定标准。
4.如果发现调试过程中存在严重问题,应及时停止调试,并请专业人员进行修复。
结论通力电梯调试是确保电梯安全运行的必要步骤。
通过合理的调试过程,可以确保电梯的各项功能正常工作,并提供安全可靠的乘坐体验。
通力电梯V3f25调试指南

V3f25调试指南一:概要调试指南仅用于v3f25驱动模块 713990REV2.0该驱动模块在出厂前已经过测试,并预设基本调节1.1安全与健康强制规定注释遵守您所在国家的电梯安全法规如本指南与您所在国家的电梯安全法规冲突时,以后者为准必须极其小心地操作电气部件和外罩 V3f25的主电路电容和逆变板,安全回路,控制内都有高电压关闭主电源后至少等5分钟才能测量v3f25内部和马达接线箱逆娈板的Led danger灯亮表示 v3f25内仍有高压存在,即关闭主电源,照明,风扃,插座及其相关线路仍有 220v电压。
1.2 工具数字万用表/测试法码1.3 参考资料am-1.1.30-b tc04807wl-en.tc04807w2-en so-11.65.09-6 as-11.65.01-a as-11.65.08-a1.4 操作界面: Lce 软件必须是3.3 相当于(chinaMAX1.4) 或以上版本,V3f25参数在Lce菜单6中,其操作方法与其它菜单相似,更改Lce菜单6中参数必须在Rdf模式下进行,读取或更改完菜单6的参数后记隹退出菜单6。
更改后就参数就起作用,但断电后丢失。
用菜单6-99永久保存参数。
1.5 V3f25组成V3F25包括:-Hcb:运动控制板board)-逆变板385A2:(Lnverter board)-CMB:电流测量板385:A3(Current measure board)-风扃303-变压器89-中间直流电路电容器385:c1,c2,(c3,c4)-大功率晶体管385:v1-v3-制动三极管385:v4(Braking Transistor)-二极管整流桥385:v5(Diode Bridge)-制动电阻306只用于40A的v3f25中1.6 385:Al hcb板在此板上RDIR插针有两个,不能少(不论是水平或是垂直), 将两针都旋转90度就可以改变旋转娈压器的极性.1.7 385:A2 lnverter board 逆变板二驱动系统/马达设定:确保am-1.1.30的19.2章所列项目己检查完成2.1检查连接插:tacho测速计(xg1,xg2;屏蔽线接到左侧板),resolver旋转变压(xr),lwd(xw接电阻2-10k)2.2开电;先打下rdf并接通298(保险开关),再送主电源(注意次序)2.3检查(6-3---7,6-60=19),如是q2马达还要检查6-8,6—10=12,用万用表检查Mxtorq设定(核对附表);如是Q2马达,核对菜单6—10,测量Mxtorq(+)和AGND(-),调RTORQ,如果调整TORQ则必须同时检查并调整TAC和TSPL注:q1马达是一种新的mxl8马达型Array号,在马达铬牌上标为mxl8q22.4 tacho极性向上TPOL亮,否则调换XGl和XG2注意:rdir插针有两个,不能少(不管是水平还是垂直),将两插针都旋转90度就可以改变旋转变压器的极性.2.5 Resolve极性向上RPOL亮,否则将RDIR跳线转90度.注:以下(2.x)和(2.y)并非出自AM-11.65.15原文,而是参照FL-Il.65.20(2.x) 385:A3cmb板平衡调节,务必按以下次序:(a) 调p1,使U与CMB板上的AGND之间电压为0mv(+/-0.1mv);(b) 调p2,使W与CMB板上的AOND之间电压为0mv(+/-0.1mv);(c) 调p3,使v与CMB板上的AGND之间电压为Omv(+/-O.1mv)(2.y) 385:AIHCB板三相平衡调节,先短接UREF2:(a) 调RTR,使TTR与HCB板上的AGND电压为Omv(+/-0.5mv);(b) 调RTS,使TTS与HCB板上的AGND电压为0mv(+/-0.5mv);(c) 调RTT,使TTT与HCB板上的(d) 取走UREF2的短接线2.6 检查LWD;调LWD和LWDF使2.7 调整Resolver旋转变压器角度;旋转变压器角度自动调整介绍:有关,小化(对应于所需的马达转矩).调整过程是半自动的:-在钢丝绳未安装时通过RDF确保测速计(Tacho)和旋转变压器号已调整.-无论何时都要确保安全:钮中断调整,中断后只能从头开始-操作者自己决定方向-V3f25决定何时停止两次成功的RDF运行(v3f25运行是v3F25驱动马达旋转1.4HBC板上有一个蜂鸣器:-如果旋转变压器是零度(表示末调过),你能听到每隔15秒有四短音-在调整时你能听到两重蜂鸣响声-上行时,每隔一秒有四短音-下行时,每隔一秒有两短音-一长两短音表示有故障,可能的原因是;你按RDF按钮手指松开了,或安全回路断开了,那么只有从头开始调整注意:有一种特殊情况v3f25无法找到角度:如果你偿试了5次以上,每次刚启动就停住,那你就必须调换马达的U,V接线然后重新开始调整-在这种隋况下,你能听到一长三短的蜂鸣.(2.71)未安装钢丝绳:马达第一次运行,检查没有任何物件在曳引轮上.a) 确保制动器已经调好,检查RDF开关已打下.2.72己安装钢丝绳a) 打下rdf开关,确保井道有足够的运行空间让马达转两圈.b) 检查xw插已接好,监时调节lwd(参看2.8)使5-1的载重显示与轿厢载荷相对应.c) 轿厢装入大约25-35%或65-75%的荷载(不能是空载或满载).Mxl8曳引机没有装制动电路,松制动器要小心,不能让溜车速度太快.此时不允许有人在井道!d) 短时松开制动器一下,检查tpol和rpol灯,上行都亮,下行都不亮.e) 如果轿厢向下溜,依照(2.71),即先上后下运行两遍.f) 如果轿厢向上溜,依照(2.71),但要先下后上(记住:总是先向重的方向运行).最后检查6-62,如果等于0度,表示自动检测不成功,重做;如果是1-360度,则用6-99保存.2.8临时调lwd注意: 安装进度在此时应装好钢丝绳,V3f25可以驱动轿厢运行.以下的1wd调整是基于下述情况.对重已装入大约40%的对重块,轿厢的装璜尚未安装.轿厢与对重大至平衡,但轿厢必须比对重重一点.a) 电气调整前必须先调整1wd机械安装.b) 连接1wd插头,代替临时插头.屏蔽线接到驱动模块左边的金属板上.Mxl8曳引机没有装备动态的制动电路,松制动器要十分小心,不能让溜车速度太快.c) 轿厢空载,短时松开制动器一下,确认电梯向下溜,轿厢比对重重一点.d) 轿厢空载,调节hcb的1wde(offset)至5-1菜单显示0%载荷.e) 轿厢空载,调节hcb的1wdf(gain)至5-l菜单显示50%载荷f) 卸掉半载(轿厢空载),调节hcb的1wde(offset)至5-1菜单显示50%载(因为此时轿厢与对重大致平衡).注意:如果实际情况与上述的不同,则调整称重不但要考虑轿内载荷,还要考虑轿厢与对重的平衡情况根据安装手册继续余下的工作.3 快车调试3.1细调lwda) 空载时,检查轿厢和轿底1wd的安装.b) 电压表一极接1wd(+),一极接agnd(-)c) 轿厢空载,调1wed至1.0v(+/-0.0lv),而且菜单5-1显示00d) 50%载荷:调1wdf至2.5v(+/-0.0lv),而且菜单5-1显示50.e) 打下rdf开关,拨出1wd插,检查lce菜单5-1的显示应低于-15%(如-20%)f) 如果菜单5-1的显示大于-15%(如-2%),应增大称重感应器到感应片之间的距离,并重调.参看E—lineMinlSpace安装手册12.10章节.3.2 SETUPa) 将rdf拉下,驱动电梯至底层或稍低一点.检查lcecpu板上30,61:u,77:n,?7:s灯亮.b) 技菜单5-2-l,蜂鸣响起:间歇的长音.rdf打上,电梯自动慢速向上.c) 如果电梯中途停下,会显示故障代码(111---116)d) 如果setup成功,将显示顶层楼楼层,电梯从Setup运行模式进入正常运行模式.3.3 测量马达力矩3.3.1平衡系数:a) 轿厢50%载荷,从底层向顶层快速运行,到达顶层后拉下rdf,记下6-71(马达力矩)读数(不带符号).b) 打上Rdf,从顶层向底层快速运行,到达底层后拉下rdf,记下6-71(马达力矩)读数(不带符号).c) 两次读数应很接近,两者的差(上减下)就是Balance error(平衡误差),该差值x额定载重量=??kg,就是半载轿厢与对重的重量差.d) 如果上行读数大,应增加对重的重量.c) 如果下行读数大,应减小对重的重量.f) 如果改变了对重的重量,则重新比较读数.3.3.2检查驱动参数:空车向上全程运行,到顶层停车后拉下rdf,检查6-71(马达力矩),不应小于0.6.空车向上全程运行,到顶层停车后拉下rdf检查6-71(马达力矩),不应小于1.2.否则应重复步骤(2.3),某些参数或电位器可能设置不对.细调和测试本章包含下列主题:舒适感,运行效率,停层精度,曳引试验和缓冲器试验.并不意味着每一台电梯都要一页一页地,系统地执行本章所有内容,如果你在上述某个主题有问题,只需根据相关主题的步骤执行.4.1舒适感:注意:本章所有参数都对电梯舒适感有影响,能达到的最好效果需要综合所有参数来调试.某些参数调好后不需要再调.同时,机械部分必须正确安装(导轨,平衡系数,轿厢及隔震,导靴)4.1.1震动a) 制动器调节:制动器衬垫不得与制动轮摩擦.b) 细调Resolver角度(Q2马达不需要做):电梯开到顶层,每2度增大或减少菜单6—22的值(<+/-20度),快车乘坐感觉尤其注意加减速过程.总是从同一层向下测试,用菜单6-99保存,并记录在移交文件里以便更换HCB板时需要.c) 速度控制:减小p或增大i能减轻可能的震动,但同时使干层精度变差.6-1(p Factor)=2.5,以0.5逐次减小,细调时用更小步.6-2l(I Factor)=0.1s,以0.1逐次增大.细调时用更小步.用菜单6-99保存d) 如轿厢有高频振动,可增大Tacho软件滤波时间Tacho filter time(6-32=15ms),用菜单保存.4.1.2 启动空车下行检查马达开始转动时制动器应先打开.可调整启动延时Start delay(6-33,默认值4CDH-0.3秒),不应太大,以免影响电梯的效率,用菜单6-99保存.回溜或很“冲”: 调之前Setup应以做好,因为驱动系统必须知道井道楼层位置数据.a) 首先检查电梯的平衡系数.b) 再检查称重信号,如需要重新调整1wd.c) 轿厢半载.d) 记下6-33启动延时值,将其暂时改为1秒.e) 记下6-1 p factor的值,如大于1.5将其暂时改为1.5.f) 在井道中部,调整6-24 Balance error(平衡偏差-0.2---0.2,每次改变0.02)直至rdf在两个方向启动都好,用菜单6-99保存.s) 在底层,检查6-26 Rope weight(钢丝绳重量),如有补偿链=0,如没有=3.0,每次改变0.5使慢车上行无回溜,如上行有回溜则调大,用菜单6-99保存.h) 使轿厢空载.在底层慢车上行调6-23(start torque scaling,默认值=1.00),每次改变0.05使慢车上行无回溜,均从底层启动,每次间隔10秒以确保启动LWD信号稳定.调好后用菜单6-99保存.i) 在顶层下行调6-27(cai-cable weight随行电缆重量,默认值=0),每次改变0.5.均从项层启每次间隔10秒以确保启动时LWD信号稳定,调好后用菜单6-99保存.j) 恢复6-1 P factor和6-33 Start delay原值,用菜单6-99保存.4 .1.3平层停车最后爬行距离(时间)调节,6-28(Final jerk distance)=125mm,减小6-28使平层更有效率,增大使平层更平滑.4.2电梯运行效率4.2.1 加速度参数(仅在必要时才更改,加速度影响77:U/N的位置)4.2.2 最后爬行距离(时间),6-28(Final jerk distance)=125mm,没有提前开门时4.3 平层精度4.3.1 正常运行的平层精度(注意调节参数P过大或I参数过小可能会引起振动)a) KTW/Q参数:默认值2.8,如果额定载重大(超过(1000kg)可调节参数最大至3.5,每次改变后都检查平层精度,同样用6-99保存,KTW/Q=(轿厢+吊架+门机构+装修+对重)的重量/额定载重.b) P(6-1)每次增加0.5,如细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) Final jerk distance(6-28)调整,参看4.1.34.3.2再平层精度(注意:调节参数P过大或I过小可能会引起振动)a) 如果只是个别楼层的再平层不好,先检查6l:u/n的重叠量.b) p(6-1)每次增加0.5,细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) 增加Relevelling correction distance(6-29).最后用菜单6-99保存.4.4曳引试验参看Mini Space安装手册中的空载曳引试验的125%的曳引试验及制动试验.a) 按菜单6-72(enable traction test)曳引测试=1,该功能放宽了速度监察,只对第一次运行有效.b) 根据安装手册进行测试.c) 如果马达不够力:1)记录下HCB板Mxtorq(+),AGND(-)之间的电压.2)调高0.5v(注意:不能趄过4.8V,如果马达转动不了,不应驱动马达超过2至3秒)3)重新进行测试4)如果马达仍不能动,再0.5V调高0.5V(注意:不能超过4.8v,如果马达转动不了,不应驱动马达超过2至3秒)5)重新进行测试6)测试完成,恢复你改动过Mxtorq电压.4.5缓冲器测试(满速冲击测试,仅在必要时才做)4.5.1对重缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门c)按6-73(缓冲器测试功能,只有效一次).d)打上RDF,按顶层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器有无损坏.4.5.2轿厢缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门.c) 按6-73(缓冲器测试功能,只有效一次).d) 打上RDF,按底层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器的无损坏.4.6马达电流测量测量HCB板上的(+)Meas和(-)Agnd之间的电压,Ivac=30A(如果驱动单元是40A)或lvac=60A(如果驱动单元80A)5故障排除5.1 V3f25故障代码:参看E—line Mini Space安装手册,在逆变板(1nverter board)上有三个红色LED灯,分别表示电流过大(SCL),制动电阻故障(BRSL),中间直流电压监察(DCL),同时在LCECPU板上显示故障代码5.2平层感应器:30,61u/n感应器之间必须装隔离片.5.3 HCB板复位:如果HCB板根本不工作且持续复位(你会听到蜂鸣报警),检查RESLOVER连线和接头.5.4 Reslover角度:当出现以下情况时:a)轿厢和钢丝绳已经装好.b)轿厢空载,对重被支撑着,因此松闸时对重不能被提起.c)Resslover角度未调.你可能无法移走对重下的支撑架,在这种情况下,有两重方法可以试一试(此时不允许有人在井道工作):a) 使用6-70自动检测角度,向下开动.b) 从360度开始,每隔30度试角度,向下开动.直到能提起对重,移走支撑架.然后依照2.7自动检测geslover角度.5.5更换HCB(参看AS-11.65.1)a) 用菜单6-62记下旧板的旋转变压器的角度,关电换新板.b) 设置6-62为0并按6-98(电梯处于RDF模式,停于底层)设置默认参数.c) 根据现场电梯规格调节菜单6-3至6-7.(对于q2马达,调节6-3至6-8,6-60=12)d) 设置6-62为旧的旋转变压器角度,按6-99保存.c) 核对列表数据(对于q2马达,核对6-10)检查Mxtorq电压(+/-0.01V),调rtorq.f) 调节TAC电压等于6-11(37.3mm)或6-12(75mm):拔下XC/l-2,将S5跳线从2-3移至l-2位置,测量TAC(+)和AGND(-),调节Tacho电位器,误差+/-0.01,调好后恢复S5和XG.g)调节TSPL电压等于6-13所示值(+/-0.01v),测量TAPL+和ANGD-,调节RSPL.h)调节LEDi)做SETUP5.6 TAC和TSPL电压计算参看英文原版(AM-11.65.15),(0%=1v,20%=1.6v,50=%2.5v,100%=4v,110%=4.3v)附录1:Lce菜单6中的v3f25参数(图号:713983)识别号与菜单6一至菜单6 单位范围默认值工厂设定现场设定参数组文档识别号=本表格6-0 2000--- 2000 2000 2000电梯参数注意!首先检查这些参数和6-60(*)P增益6-1 S/m 0.0---15.9 2.5 2.5加速度6-2 m/s2 0.6---1.0 0.8 0.8r额定速度6-3 m/s 1.00---2.50 2.50d额定载重量6-4 Kg 400 1800 630电流感应比例(40A是1,80A是2) 6-5 1---2 2r曳引轮直径6-6 mm 600---750650绳比6-7 1---2---3 2额定力矩电流(1800Nm) 6-8 Amp 5.0---99.9Q2马达注:曳引轮直径和绳比决定了速度控制器里旋转变压器的比例,它们同时也用于计算电梯的额定力矩电位器调节,注:这些参数由v3f25计算,是只读参数识别号与菜单6一至菜单6 单位范围默认值工厂设定现场设定0.000—5.000---VMXTORQ 6-10测试电压(直径=37.7mm) 6-11 V 2.350—7.500---测试电压(直径=75mm) 6-12 V 2.350—7.500 2.431对应于0.3m/s的速度限制电压6-13 V 0.150—5.0000.540微调参数识别号与菜单6一至菜单6 单位范围默认值工厂设定检修或RDF速度6-20 m/s 0.3 0.5 0.3 0.3I 参数6-21 sec 0.05---1.00 0.20 0.20速度降低比=降低的速度/额定速度6-22 0.03---1.00 1.00 1.00 Start torque scaling启动力矩比例6-23 0.50---1.10 1.00 1.00 Balance error (平衡误差) 6-24 -0.30---0.30 0.00 0.00 KTW/Q factor 6-25 0.4---7.0 2.8 2.8Rope weight钢丝绳重量6-26 Kg/m-2.0---7.0 0.0Car cable weight随行电缆重量6-27 Kg/m0.00---5.00 0.00 0.00 Final jerk distance最后爬行距离6-28 mm 0---250 125 125e再平层校正距离6-29 mm 0---20 0 0 Tacho scaling factor测速记比例系数6-30 0.400---0.900 0.900 0.900 Tacho fault counter测速记故障计数6-31 0---10 0 0 Tacho filer time测速记滤波时间6-32 ms 0---40 15 15 Start delay启动延时6-33 sec 0.10---1.00 0.30 0.30曳引机参数识别号与菜单6一至菜单6 单位范围默认值工厂设定现场设定马达极对数 (*) 6-60 12---19 19Nm 1800 1800 1800 1800 曳引机力矩mx18=1800Nm 6-61旋转变压器角度6-62 ele 0---360 0 0调试和试验识别号与菜单6一至菜单6 单位范围默认值工厂设定旋转变压器角度自动调整6-70 0---1 0 0马达力矩测量6-71 -1.500---1.500 0 0 Enable traction test曳引试验6-72 0---1 0 0 Enable buffer test缓冲器试验6-73 0---1 0 0注:曳引试验和缓冲试验只一次有效PERMANENT STORE: 永久保存Default parameters 默认参数6-98 0---1 0 0 Save 永久保存参数6-99 0---1 0 0要恢复默认参数,将6-62改为0,再将6-98改为1,然后断电V3F18/V3F25M parmeter factory and site setting table附录2: Mx18-/v3f25规格表pully Mxtorpvoltage Speed Tsp Roping Drive TachoG Xx LoadG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压M/S mm A mm V KGG 9 630 1 650 1:1 40 37.7 1.09G 1 630 1 750 1:1 40 37.7 1.26G 18 800 1 650 1:1 40 37.7 1.40G 2 800 1 750 1:1 40 37.7 1.62G 3 1000 1 650 1:1 40 37.7 2.12G 4 1000 1 750 1:1 40 37.7 2.48voltage G Xx Loadpully MxtorpSpeed Tsp Roping Drive TachoG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压M/S mm A mm V KGG 19 630 1.6 650 1:1 40 37.7 1.65G 5 630 1.6 750 1:1 40 37.7 1.91G 59 800 1.6 650 1:1 40 37.7 2.12G 6 800 1.6 750 1:1 40 37.7 2.45G 7 1000 1.6 650 1:1 40 37.7 3.15G 8 1000 1.6 750 1:1 40 37.7 3.12G 64 630 2 650 1:1 40 37.7 2.80G 10 630 2 750 1:1 40 37.7 2.76G 69 800 2 650 1:1 40 37.7 3.58G 11 800 2 750 1:1 40 37.7 3.54G 12 1000 2 650 1:1 40 37.7 2.26G 13 1000 2 750 1:1 40 37.7 2.25G 90 630 2.5 650 1:1 40 37.7 2.8037.7 14 630 2.5 750 1:1 40 37.7 2.76G 91 800 2.5 650 1:1 40 37.7 3.58G 15 800 2.5 750 1:1 40 37.7 3.54G 16 1000 2.5 650 1:1 80 37.7 2.26G 17 1000 2.5 750 1:1 80 37.7 2.25G 20 630 1 650 2:1 40 37.7 1.04G 21 800 1 650 2:1 40 37.7 1.31G 29 800 1 750 2:1 40 37.7 1.50G 22 1000 1 650 2:1 40 37.7 1.64G 39 1000 1 750 2:1 40 37.7 1.89G 23 1350 1 650 2:1 40 37.7 2.22G 24 1350 1 750 2:1 40 37.7 2.75G 25 1600 1 650 2:1 40 37.7 3.22G 26 1600 1 750 2:1 40 37.7 3.08G 27 1800 1 650 2:1 40 37.7 3.65G 28 1800 1 690 2:1 40 37.7 3.88G 30 630 1.6 650 2:1 40 75G 31 800 1.6 650 2:1 40 75 1.82G 49 800 1.6 750 2:1 40 75 2.29G 32 1000 1.6 650 2:1 40 75 2.61G 79 1000 1.6 750 2:1 40 75 2.85G 33 1350 1.6 650 2:1 40 75 2.73G 34 1350 1.6 750 2:1 40 75 3.86voltagepully MxtorpG Xx LoadSpeed Tsp Roping Drive TachoG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压KGM/S mm A mm VG 35 1600 1.6 650 2:1 80 75 4.44G 36 1600 1.6 750 2:1 80 75 2.65 2.30G 37 1800 1.6 650 2:1 80 75 2.60G 38 1800 1.6 690 2:1 80 75 2.76G 40 630 2 650 2:1 40 75 2.33G 41 800 2 650 2:1 40 75 2.92G 42 1000 2 650 2:1 40 75 3.61G 43 1350 2 650 2:1 80 75 2.45G 44 1350 2 750 2:1 80 75 2.80G 45 1600 2 650 2:1 80 75 2.90G 46 1600 2 750 2:1 80 75 3.34G 47 1800 2 650 2:1 80 75 3.28G 48 1800 2 659 2:1 80 75 3.48G 50 630 2.5 650 2:1 40 75 2.73G 51 800 2.5 650 2:1 40 75 3.41G 52 1000 2.5 650 2:1 80 75 2.11G 53 1350 2.5 650 2:1 80 75 2.84G 54 1350 2.5 750 2:1 80 75 3.24G 55 1600 2.5 650 2:1 80 75 3.92G 56 1600 2.5 750 2:1 80 75 3.86G 57 1800 2.5 650 2:1 80 75 4.42G 58 1800 2.5 690 2:1 80 75 4.02G 65 630 1.75 750 1:1 40 37.3 1.91G 66 800 1.75 750 1:1 40 37.3 2.46G 67 1000 1.75 650 1:1 40 37.3 3.16G 68 1000 1.75 750 1:1 40 37.3 3.67G 70 630 1.25 650 2:1 40 37.3 1.28G 71 800 1.25 650 2:1 40 37.3 1. 6 1G 72 1000 1.25 650 2:1 40 37.3 2.0118G 73 1350 1.25 650 2:1 40 37.3 3.G 74 1350 1.25 750 2:1 40 37.3 3.15G 75 1600 1.25 650 2:1 40 37.3 3.79G 76 1600 1.25 750 2:1 40 37.3 3.76G 77 1800 1.25 650 2:1 40 37.3 4.28G 78 1800 1.25 690 2:1 40 37.3 4.55voltagepully MxtorpSpeed Tsp Roping Drive TachoG Xx LoadG号码载重速度曳引轮径绳比驱动模块测速记直径Mxtorq电压M/S mm A mm V KGG 80 630 1.75 650 2:1 40 75 1.84G 81 800 1.75 650 2:1 40 75 2.30G 82 1000 1.75 650 2:1 40 75 2.87G 83 1350 1.75 650 2:1 80 75 2.43G 84 1350 1.75 750 2:1 80 75 2.23G 85 1600 1.75 650 2:1 80 75 2.88G 86 1600 1.75 750 2:1 80 75 2.51G 87 1800 1.75 650 2:1 80 75 3.26G 88 1800 1.75 690 2:1 80 75 3.46附录3: 蜂鸣代号(*):一短音 (-):一长音 ( ):停顿约1秒 (q):停顿约15秒 (m):停顿约60秒 (---):不间断蜂鸣编号警告内容蜂鸣代号1 驱动模块过热(-*-*m )2 马达过热(-*m )3 旋转变压器角度为零(未调整) (****q)4 旋转变压器角度自动调整:上行(****)5 旋转变压器角度自动调整:下行(** )6 旋转变压器角度自动调整过程出错(-** )7 无发找出旋转变压器角度,需调换马达U/V接线(-*** )8 没有做SETUP(井道设定) (*-*m )9 SETUP(井道设定)指令处于有效状态( - )10 在STUP过程中V3F25检查到井道设备有错(-****q)11 NTS错误:V3F25在正常模式下曾开始减速(***q )12 参数已被改变(* q )13 V3F25位置错误(*- )14 缓冲器和曳引测试(-----)。
通力通力调试资料(带6菜单)
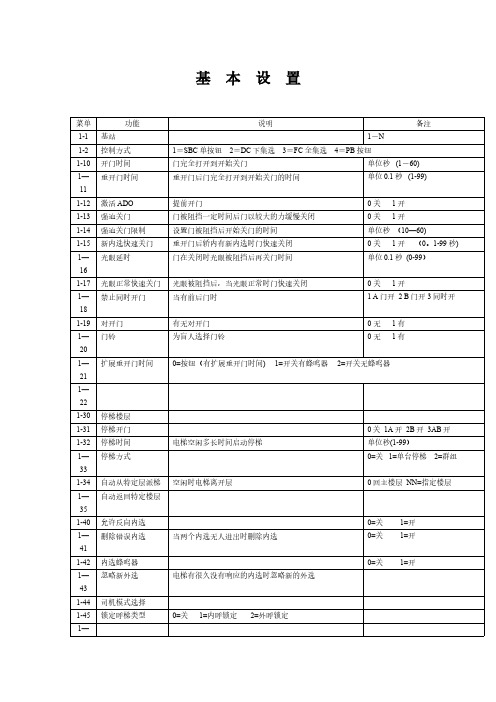
基 本 设 置菜单功能说明备注1-1基站1-N1-2控制方式1=SBC单按钮 2=DC下集选 3=FC全集选 4=PB按钮1-10开门时间门完全打开到开始关门单位秒 (1-60)1—重开门时间重开门后门完全打开到开始关门的时间单位0.1秒 (1-99)111-12激活ADO提前开门0 关 1 开1-13强迫关门门被阻挡一定时间后门以较大的力缓慢关闭0 关 1 开1-14强迫关门限制设置门被阻挡后开始关门的时间单位秒(10—60)1-15新内选快速关门重开门后轿内有新内选时门快速关闭0 关 1 开(0。
1-99秒) 1—光眼延时门在关闭时光眼被阻挡后再关门时间单位0.1秒 (0-99)161-17光眼正常快速关门光眼被阻挡后,当光眼正常时门快速关闭0 关 1 开1—禁止同时开门当有前后门时 1 A门开 2 B门开 3同时开181-19对开门有无对开门0 无 1 有1—门铃为盲人选择门铃0 无 1 有201—扩展重开门时间0=按钮(有扩展重开门时间) 1=开关有蜂鸣器 2=开关无蜂鸣器211—221-30停梯楼层1-31停梯开门0关 1A开 2B开 3AB开1-32停梯时间电梯空闲多长时间启动停梯单位秒(1-99)1—停梯方式0=关 1=单台停梯 2=群组331-34自动从特定层派梯空闲时电梯离开层0回主楼层 NN=指定楼层1—自动返回特定楼层351-40允许反向内选0=关 1=开1—删除错误内选当两个内选无人进出时删除内选0=关 1=开411-42内选蜂鸣器0=关 1=开1—忽略新外选电梯有很久没有响应的内选时忽略新的外选431-44司机模式选择1-45锁定呼梯类型0=关 1=内呼锁定 2=外呼锁定1—1-471-50电梯组群编号并联时电梯编号,主梯为11-511-521-53外呼重开门次数1=1次 2=2次 3=REOHK1-54最低楼层1-55EMC的组号1—消防保留层0—NN591-60消防楼层1—地区法规611-62消防类型0无消防 1frd 2frd门关 3fid 门开 4frd和fid门关 5frd和fid门开 ( fid消防检测 frd消防运行) 1-63在消防返回层开门1=A 2=B 3=A+B 4=B1—紧急返回楼层0-NN 0=下一个可能的楼层641—紧急返回楼层门0=关 1=A开 2=开 3=A+B开651-66防火门0=无FPD 1=有FPD EPS电源0=外部 1-6=内置EPS1—671—最多电梯台数允许紧急返回和服务的电梯台数0—6681-70满裁百分比1—轿顶检修限位0=77U/N 1=77U 2=77N 3=不停711—锁梯时停止层721-73锁梯门位置0=关 1=A开 2=B开 3=A+B开1—优先外呼服务方式0=无 1=PRL LA 2=PRL LO 3=PRL HA 4=PRL HO 5=HELA 6=HELO741—轿厢风扇省电0=无 1-59分钟751-76轿厢照明省电0=无 1—59分钟1-77轿厢照明电压监控0=无 1=开1-78照明电流监控1—791—主层强制停车0不 1=下行 2=上行 3=上下行801—经过楼层时的信号响声提示(轿厢过某层或在某层)0=关 1=开1—82到站钟类型0关 1开 2提前闪(LALAB) 3提前闪(LALDN)1—83超载灯闪烁指示0=关 1=开1-84内选优先PRC LCE COB输入XC16 1=普通PRCK 2=PRCB 3=PRCCS菜单功能说明备注1—851-86地震1—87应急电池1—881—891—901—91DOM CS选项0 11—921-931-941—99重置厂方设置对菜单2无效2—1马达型号05=MX05 06=MX06 10=MX102-2不准驱动2—3加加速度加加速度,圆化加速度,恒速和减速0=0。
通力电梯V3f25调试指南

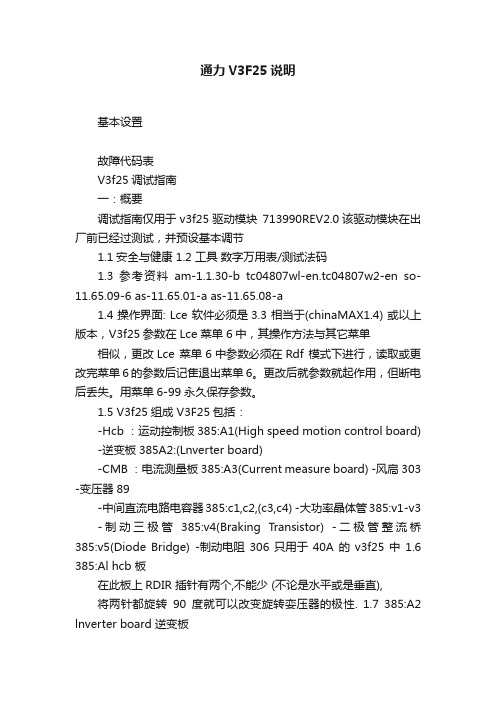
V3F25包括:
-Hcb:运动控制板 385:A1(High speed motion control
board) -逆变板 385A2:(Lnverter board) -CMB:电流测量板 385:A3(Current measure board) -风扃 303 -变压器 89 -中间直流电路电容器 385:c1,c2,(c3,c4) -大功率晶体管 385:v1-v3 -制动三极管 385:v4(Braking Transistor) -二极管整流桥 385:v5(Diode Bridge) -制动电阻 306只用于 40A的 v3f25中
TSPL
XR RESOLVER
12 34
RDIR 旋转变压器方向
(b) 调 RTS,使 TTS与 HCB板上的
385:A1板
AGND电压为 0mv(+/-0.5mv);
X7G
420V
(c) 调 RTT,使 TTT与 HCB板上的 AGND电压为 Omv(+/-0.5mv)
BRF
X6
Байду номын сангаас
(d) 取走 UREF2的短接线
385:A3
385:A1
385:A2
385:V4 385:V3 385:V2 385:V1 385:V5
C4 C2 306 C1
C3
1.6 385:Al hcb板
在此板上 RDIR插针有两个,不能少 (不论是水平或是
303
垂直), 将两针都旋转 90 度就可以改变旋转娈压
89
器的极性.
1.7 385:A2 lnverter board 逆变板 二 驱动系统/马达设定: 确保 am-1.1.30 的 19.2 章所列 项目己检查完成
通力电梯维修调试资料大全
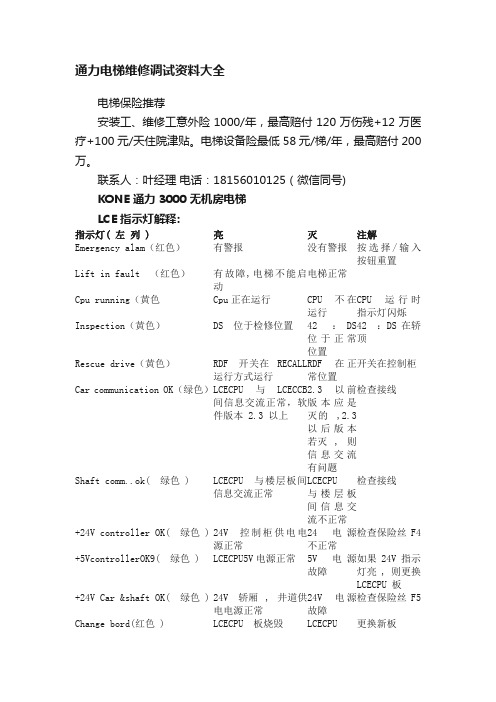
通力电梯维修调试资料大全电梯保险推荐安装工、维修工意外险1000/年,最高赔付120万伤残+12万医疗+100元/天住院津贴。
电梯设备险最低 58元/梯/年,最高赔付200万。
联系人:叶经理 电话:181****0125(微信同号)KONE 通力 3000 无机房电梯LCE 指示灯解释:指示灯( 左 列 )亮 灭 注解 Emergency alam (红色) 有警报没有警报 按选择/输入按钮重置 Lift in fault (红色) 有故障,电梯不能启动电梯正常Cpu running (黄色 Cpu 正在运行 CPU 不在运行 CPU 运行时指示灯闪烁Inspection (黄色) DS 位于检修位置 42 :DS 位于正常位置42 :DS 在轿顶Rescue drive (黄色) RDF 开关在 RECALL 运行方式运行 RDF 在正常位置开关在控制柜Car communication OK (绿色) L CECPU 与 LCECCB 间信息交流正常,软件版本 2.3 以上 2.3 以前版本应是灭的 ,2.3以后版本若灭 , 则信息交流有问题检查接线Shaft comm..ok( 绿色 ) LCECPU 与楼层板间信息交流正常 LCECPU 与楼层板间信息交流不正常检查接线+24V controller OK( 绿色 ) 24V 控制柜供电电源正常 24 电源不正常检查保险丝 F4+5VcontrollerOK9( 绿色 ) LCECPU5V 电源正常 5V 电源故障 如果 24V 指示灯亮 , 则更换LCECPU 板+24V Car &shaft OK( 绿色 ) 24V 轿厢 , 井道供电电源正常 24V 电源故障检查保险丝 F5Change bord(红色 ) LCECPU 板烧毁 LCECPU 更换新板板正常 Speed>0.1m/s( 黄色 ) 正在加速 ,速度大于 0.1M/S 正在减速 ,速度小于0.1M/S指示灯( 中间 ) 亮 灭 注解Start pemit(黄色 主继电器都激活 (201:1,201:2,201:4) 主继电器都释放 如果灯不灭 ,可能有继电器阻塞(XD1/3POS379)Shaft door contact( 黄色 ) 所有层门都已关好 层门未关好 XH2/3 终端POS.379Close door command( 黄色 ) 关门命令有效 关门命令无效 从LCE 到 ADV 从 LCE 到 ADVDrive needed( 黄色 ) 控制系统认为需要启动 不需要启动 呼梯 ,泊梯 . 自动平层等V3F OK( 绿色 ) 驱动系统可正常运行 驱动单元有故障Safety input(绿色 ) 到轿门触点前的安全回路正常 到轿门触点前的安全回路有问题XC1/5 POS379Open door command( 黄色 ) 开门命令有效 无命令 从 LCE 到 ADV photocell ( 黄色 ) 光眼光束受挡 光束未受挡 光束未受挡 XB29/2 及XB31/2POS.379 Open button(黄色 ) 轿厢内开门按钮按下 未按下Close force limiter( 黄色 ) 关门力限制器申请重开门 不需重开门 XB28/8 及 XB30/8POS806 指示灯( 右列 ) 亮 灭 注解 Drive up( 黄色 ) 向上运行指令已送往 V3F25 无效77:U( 黄色 ) 轿厢在上部减速区 轿厢不在上部减速区 77:U 断开61:U( 黄色 ) 轿厢在 61:U 区内 轿厢不在 61:U 区内 地坎以上地坎以上 5MM,以下 145MM30 ( 黄色 ) 轿厢在门区内 轿厢不在门区内 地坎以上150MM, 以下150MM 61N( 黄色 )轿厢在 61:N 区内 轿厢不在 61:N 区内 地坎以下 5MM, 以上 145MM 77:N( 黄色 )轿厢在下部减速区 轿厢不在下部减速区 77:N 断开 77:S( 黄色 )77:S 开关断开或无此开关 轿厢不在上下端站 只在终端楼层间距短的时候 Drive down(黄色 ) 向下运行指令已送往 V3F25无效LCE 用户接口功能模式:(EcoDisc )菜单子菜单 功能 注 解- E 1 故障历史记录 -显示最近的故障情况- F 2 清除故障记录-重置故障记录,清除内存- 菜单子菜单功能 注 解- d 驱动故障 -参看故障代码表- 菜单 子菜单功能 注 解 代码含义 ( 斜体表示默认值 )必备 1 1 基站 选择基站 (1) 楼层号1-N1 2 控制方式 3 集选方式选择,相应普通楼层的内指令信号 1=SBC 单按钮控制 2=DC 下集选 3=FC 全集选 4=PB 按钮控制门 系 统 1 10 开门时间 相应普通楼层的内指令信号时 , 从门完全打开至开始关门时的时间单位秒 (1-60)1 11 重新开门时间 重开门后 , 从门完全打开至重新开始关门的时间 (20)单位 0.1 秒 (1-99)1 12激活 ADO 激活提前开门功能 0= 关闭 1= 激活1 13 强迫关门 如果在一段选定的时间内关门受阻 , 门将以较慢的速度蜂鸣关门 , 此时只有关门力限器起作用 , 强迫关门持续到关门结束0= 关闭 1= 激活1 14 强迫关门时间限制设置开始强迫关门的时间 (20) 单位秒 (10-60)1 15 新轿内指登记快速关门开门或门已打开时 , 按下内指按钮可以缩短开门时间 单位 0.1 秒 0= 无该功能 (0-99)1 16 光眼延时 设置光眼被挡到重新关门的时间 (0-99) 20单位 0.1 秒 . 0= 无该功能 1 17 光眼正常快速快门设置光眼正常后快速关门 0= 无 1= 有1 18 禁止同时开门 A 门及B C 门的开门及同时开门功能 1=A 门优先开 2=C 门优先开 3= 同时开门1 19 对穿门轿厢选用对穿门轿厢 0= 一个门 1= 对穿门 1 20门铃 为盲人选择门铃 0= 关 1= 门完全打开时响 1 21 扩展延长开门时间 LCECOB 的输入 SC17(34:E) 的类型 0= 按钮 (DOEB)有重开门时间 1= 开关带蜂鸣器 (DOE S) 2=开关不带蜂鸣器 (DOE S)1 22 DOP 类型选择DOP 类型 0=none;1=DOP CS泊 梯 1 30泊梯楼层 选择泊梯楼层0=off 楼层号 1 31 泊梯时开门 泊梯时 A 门与B C 门的开关情况 0= 关 1=A 门优先 2=C 门优先 3=AC 同时开1 32 泊梯时间 选择电梯在开始泊梯前的空闲时间 301-99 秒1 33 泊梯模式 选择单台或群组泊梯 0= 关 1= 单梯 2= 群组泊梯1 34 自动从特定楼层派遣电梯空闲电梯将离开此楼层( ADF 功能)0= 关 nn= 指定楼层 1 35 自动返回特定楼层( ADF 功能)将电梯开往此楼层 0= 回主楼层 nn= 指定楼层 内 指 1 40 允许反向内选 允许登录与电梯运行方向相反的内指令信号,一旦停梯,便对这些信号开始响应0= 关 1= 开1 41 错误内选删除 电梯连续完成两个内指而无人出入轿厢的情况下删除所有内指信号0= 关 1= 开1 42 内选登记蜂鸣器当内选登记时发出一声短促声 0= 关 1= 开1 43 忽略新外呼 为响应超时的外呼而忽略新外呼(有很久没有相应的内选时)0= 关 1= 开1 4司机模式- 0= 标准 1=ATS HK 2=ATS CS4 选择1 45锁定呼梯的类型 指定 LCEOPT 的锁输入信号 - 锁 - 的用法 (楼层进出控制) 0= 关 1= 锁定内选 2= 锁定外呼 3= 锁定内选和外呼 1 46优先下呼1。
通力电梯V3F25与V3F16的比较
通力电梯V3F25与V3F16的比较
1、V3F25 与 V3F16 是两套不同的驱动系统,虽然两种驱动柜都能
与 LCE 接口相接,但两种驱动柜的配件不能互换使用;
2、V3F25 用于小机房的电梯。
旋转编码器、称重装置、测速发电机
以及马达的热敏电阻等设备的输入端口都固化在(HCB)385:A1 板
上;
3、V3F16 用于无机房电梯。
无机房电梯没有旋转编码器,其称重装
置、测速发电机以及马达热敏电阻等设备的输入端口也都固化在385A1(DCB)上,但是它的 A1 板上有一 FULL POWER 按钮,在调
超载和相关实验时非常有用。
4、V3F25 所采用的主要电气零部件的功率和容量都比 V3F16 要大。
5.V3F16L 输出最大频率为 75HZ 输出电压为 240-330VAC 直流母
线电压为 560VDC 对于马达是电压控制对于马达的感应器有
Tacho 和热敏电阻驱动器的温度是靠自然对流; V3F25 为输出最大
频率为 60HZ. 输出电压为 0-320VAC 直流母线电压为 540VDC 对于马达是 MX 电流控制对于马达的感应器有 Tacho 和 resolver 和热敏电阻驱动器的温度是内部风扇
6.V3F16L 驱动马达的选择一般常见的有MX05;MX06;MX10;对于
tacho 的最大输入电压为 7V,tacho:7V/1000rpm V3F25 的马达选择 MX10, MX18, MX20, MX32 对于 tacho 最大输入电压
120V,tacho:60V/1000rpm。
通力电梯调试资料2

电梯调试电梯的调试运行阶段,请务必在井道和轿厢内无人的情况下进行!以免有发生意外。
1. 机械安装、电气接线检查正确的各部件安装是保证电梯运行舒适的重要保证,门系统的安装、PAD 感应器与插板的配合,终端开关架与撞弓的配合等。
严格遵照系统接线布线和正确接线,尤其是2. 编码器检查:安装稳固、使用屏蔽线,走线必须与动力线分槽布置,走独立的金属护管,编码器反馈的脉冲信号是实现精度控制的重要保证。
3. 电源检查:检查总线容量,三相五线制;电压波动在标准范围内。
4. 接地检查:检查地线PE 与各电源端子阻值应无穷大,检查所有电梯的电气部件的接线端子与控制柜进线PE 地的电阻应尽可能小。
5. 上电检查:对应图纸测量各控制电源电压;检查F5 组参数设置与图纸各个点功能要求是否一致。
检查F0组、F1组、F6组、F8组参数设置是否符合本合同要求。
6. 检修试运行:检查各输入、输出信号、运行方向,编码器计数方向,通讯是否正常。
7. 门系统调试:手动调试门控制是否正常,开关门应流畅,关门不应有撞击,如有可以调整爬行速度或减速时间。
机械上要考虑门自复、门刀与每个门的门球的配合尺寸,保证每个厅门运行自如。
8. 快车调试:保证井到畅通,机械和电气各部件安装完成结束,无任何短接线;电气各接线及参数设置正确。
井道自学习;称重自学习;用主控板小键盘F1 组功能或操作键盘F7 测试功能,进入单层测试运行,观察运行状态和门系统是否按要求执行。
正确完毕后,再进行其他相关功能测试。
最后进行整机舒适性的调试。
l 除了调试手册上“故障诊断及对策”外,我们补充些常见问题解决指南。
1 ,层高为2 层的电梯如何完成井道自学习?现场描述:电梯完成井道自学习后,可以进行高速运行,但重新上电后,NICE3000 出现E35 ,无法进行高速运行。
问题原因:该电梯只有 2 层,井道自学习是在 1 楼平层开始的。
因此在进行井道自学习后,所得到平层插板脉冲数F4-05 为0。
通力电梯V3F25,V3F18驱动的调试快车慢车调试默者

通力电梯V3F25,V3F18驱动的调试快车慢车调试默者慢车调试:慢车前的检查请参阅通力电梯KDL16KDL32KDM慢车调试步骤6菜单清空:6-61-06-98--16-1-马达型号6-2-梯速6-3-载重量6-4-曳引比6-5-A3板线过电流互感器直接过是1,绕一圈过是2。
6-6-KTC参数(马达铭牌)6-7-马达曳引轮直径6-8-测速机轮直径。
6-10-测速机电压(一定要量)6-60-12(马达极对数)6-61-角度6-74-称重6-99-1保存快车调试:快车前的检查请参阅通力电梯KDL16KDL32KDM快车调试步骤清空轿厢调试快车。
轿底称重:传感器和地只间的直流电压(小于1,大约0.95-0.98只间)6-74- -1 清空称重6-74-0 写0点6-99-1保存。
此处为隐藏的内容!发表评论并刷新,才能查看发表评论清空轿厢:6-74- -1 清空称重6-74-0 写0点6-99-1保存。
轿厢内加入50%的重物6-74-写50%重量单位公斤额定载重除以2。
6-99-1保存轿厢内加到110%重物额定载重。
6-74-写110%重量单位公斤额定载重的110%(1吨写1100)。
合上机房检修超载报警响,轿顶XB35要插上。
轿厢出来1人5-1显示小于110%6-99-1保存(如果不对不要保存)轿厢人出来5-1显示低于超载,6-20-1.56-37-1.006-99-1保存轿厢剩余50%载重50% 6-28-中间层(6-75-14 ,0变1)曳引轮上加下减。
6-99-1保存50% 6-30-底层曳引轮上减下加。
6-99-1保存清空轿厢0% 6-27-中间层(6-75-14 ,0变1)曳引轮上加下减。
6-99-1保存0% 6-31-顶层曳引轮上减下加。
6-99-1保存6-20-恢复5.06-37-恢复原数值。
6-99-1保存。
注意:有空层时可以用慢车调整,看清楚开闸瞬间就行。
通力无机房电梯称重装置调试和注意事项
通力无机房电梯(V3F16ES)称重装置调试和注意事项1、在自动状态将电梯空载开到中间层,打到检修状态。
2、将菜单调到5-1-1确认,七段码显示L X(X为轿厢载重,范围为-33~115)3、空载的调整:将385板上的GAIN(LWDF)电位器(增益)调到中间位置(先逆时针旋转到底,会听到一种声音(轻微叭的一声),证明已到底,然后再顺时针调15圈,即为中间位置,顺时针调到底应为30圈),再调整OFFSET(LWDE)电位器(偏置),使显示变为L 0。
4、半载的调整:往轿厢内加入半载砝码,应显示50,否则调整GAIN(LWDF)电位器使之显示50,5、满载的调整:往轿厢内加入满载砝码,应显示100,否则调整GAIN(LWDF)电位器使之显示100.6、卸去砝码,应显示L 0,否则调整OFFSET(LWDE)电位器,使显示变为L 0。
7、重复4,5,6步骤,直到空载显示L 0,半载显示L 50,满载显示L 100。
8、将称重插头拔下,应显示L –15以下(如-20),否则从头重调。
9、注意事项:(1)、由于称重传感器位于绳头装置的一边,各根钢丝绳对称重感应器的影响不同,同样的拉力,越靠近感应器的影响越大(我感觉这样的称重设计是不合理的)。
因此钢丝绳涨力发生了变化或调整了钢丝绳涨力后,应重新调整称重。
(2)、如果没有补偿链,电梯在顶层和底层的称重数值会有所不同,误差如果在+ -7之内,一般不会有什么问题,如果大于+ -9,则需要调整了。
(3)、空载数值超过8,电梯上行应没问题,但下行时,会因倒溜而保护;满载数值小于93,下行没问题,上行时因下沉而保护。
(4)、由于曳引轮槽磨损不均匀(有的槽深,有的槽浅),这样电梯在不同楼层时,各根钢丝绳的涨力会发生不同变化,进而影响到称重在各层的数值偏差,如果通过调整称重不能解决,只有更换曳引轮了。
以上程序和数据仅供参考和交流,错误之处欢迎批评指正。
通力V3F25说明
通力V3F25说明基本设置故障代码表V3f25调试指南一:概要调试指南仅用于v3f25驱动模块713990REV2.0该驱动模块在出厂前已经过测试,并预设基本调节1.1安全与健康 1.2 工具数字万用表/测试法码1.3 参考资料am-1.1.30-b tc04807wl-en.tc04807w2-en so-11.65.09-6 as-11.65.01-a as-11.65.08-a1.4 操作界面: Lce 软件必须是3.3 相当于(chinaMAX1.4) 或以上版本,V3f25参数在Lce 菜单6中,其操作方法与其它菜单相似,更改Lce 菜单6中参数必须在Rdf 模式下进行,读取或更改完菜单6的参数后记隹退出菜单6。
更改后就参数就起作用,但断电后丢失。
用菜单6-99永久保存参数。
1.5 V3f25组成 V3F25包括:-Hcb :运动控制板385:A1(High speed motion control board) -逆变板385A2:(Lnverter board)-CMB :电流测量板385:A3(Current measure board) -风扃303 -变压器89-中间直流电路电容器385:c1,c2,(c3,c4) -大功率晶体管385:v1-v3 -制动三极管385:v4(Braking Transistor) -二极管整流桥385:v5(Diode Bridge) -制动电阻306只用于40A 的v3f25中1.6 385:Al hcb 板在此板上RDIR 插针有两个,不能少 (不论是水平或是垂直),将两针都旋转90度就可以改变旋转娈压器的极性. 1.7 385:A2 lnverter board 逆变板二驱动系统/马达设定: 确保am-1.1.30的19.2章所列项目己检查完成2.1检查连接插:tacho测速计(xg1,xg2;屏蔽线接到左侧板),resolver旋转变压(xr),lwd(xw接电阻2-10k)2.2开电;先打下rdf并接通298(保险开关),再送主电源(注意次序)2.3检查(6-3---7,6-60=19),如是q2马达还要检查6-8,6—10=12,用万用表检查Mxtorq设定(核对附表);如是Q2马达,核对菜单6—10,测量Mxtorq(+)和AGND(-),调RTORQ,如果调整TORQ 则必须同时检查并调整TAC和TSPL注:q1马达是一种新的mxl8马达型号,在马达铬牌上标为mxl8q22.4 tacho极性向上TPOL亮,否则调换XGl和XG2注意:rdir插针有两个,不能少(不管是水平还是垂直),将两插针都旋转90度就可以改变旋转变压器的极性.2.5 Resolve极性向上RPOL亮,否则将RDIR跳线转90度.注:以下(2.x)和(2.y)并非出自AM-11.65.15原文,而是参照FL-Il.65.20(2.x) 385:A3cmb板平衡调节,务必按以下次序:(a) 调p1,使U与CMB板上的AGND之间电压为0mv(+/-0.1mv);(b) 调p2,使W与CMB板上的AOND之间电压为0mv(+/-0.1mv);(c) 调p3,使v与CMB板上的AGND之间电压为Omv(+/-O.1mv)(2.y) 385:AIHCB板三相平衡调节,先短接UREF2:(a) 调RTR,使TTR与HCB板上的AGND电压为Omv(+/-0.5mv);(b) 调RTS,使TTS与HCB板上的AGND电压为0mv(+/-0.5mv);(c) 调RTT,使TTT与HCB板上的AGND电压为Omv(+/-0.5mv)(d) 取走UREF2的短接线2.6 检查LWD;调LWD和LWDF使LCE菜单5—l显示50%2.7 调整Resolver旋转变压器角度;旋转变压器角度自动调整介绍: 马达的电流与旋转变压器的角度有关,调整旋转变压器角度可以优化马达的效率并使马达电流最小化(对应于所需的马达转矩).调整过程是半自动的:-在钢丝绳未安装时通过RDF驱动马达上/下运行来调整,在调整前要确保测速计(Tacho)和旋转变压器(Resolver)的极性正确及LWD 称重信号已调整.-无论何时都要确保安全: 操作者能随时松开RDF的RB按钮或方向按钮中断调整,中断后只能从头开始-操作者自己决定方向-V3f25决定何时停止两次成功的RDF运行(每次包含两个方向)便能找出角度,有时v3f25在刚启动就停止,这是测试的一部分,属正常现象,成功的运行是v3F25驱动马达旋转1.4圈左右,并自动停止HBC板上有一个蜂鸣器:-如果旋转变压器是零度(表示末调过),你能听到每隔15秒有四短音-在调整时你能听到两重蜂鸣响声-上行时,每隔一秒有四短音-下行时,每隔一秒有两短音-一长两短音表示有故障,可能的原因是;你按RDF按钮手指松开了,或安全回路断开了,那么只有从头开始调整注意:有一种特殊情况v3f25无法找到角度:如果你偿试了5次以上,每次刚启动就停住,那你就必须调换马达的U,V接线然后重新开始调整-在这种隋况下,你能听到一长三短的蜂鸣.(2.71)未安装钢丝绳:马达第一次运行,检查没有任何物件在曳引轮上.a) 确保制动器已经调好,检查RDF开关已打下.按6-70自动检查Pesolver角度菜单,依据图示,先上后下.2.72己安装钢丝绳a) 打下rdf开关,确保井道有足够的运行空间让马达转两圈.b) 检查xw插已接好,监时调节lwd(参看2.8)使5-1的载重显示与轿厢载荷相对应.c) 轿厢装入大约25-35%或65-75%的荷载(不能是空载或满载).Mxl8曳引机没有装制动电路,松制动器要小心,不能让溜车速度太快.此时不允许有人在井道!d) 短时松开制动器一下,检查tpol和rpol灯,上行都亮,下行都不亮.e) 如果轿厢向下溜,依照(2.71),即先上后下运行两遍.f) 如果轿厢向上溜,依照(2.71),但要先下后上(记住:总是先向重的方向运行).最后检查6-62,如果等于0度,表示自动检测不成功,重做;如果是1-360度,则用6-99保存.2.8临时调lwd注意: 安装进度在此时应装好钢丝绳,V3f25可以驱动轿厢运行.以下的1wd调整是基于下述情况.对重已装入大约40%的对重块,轿厢的装璜尚未安装.轿厢与对重大至平衡,但轿厢必须比对重重一点.a) 电气调整前必须先调整1wd机械安装.b) 连接1wd插头,代替临时插头.屏蔽线接到驱动模块左边的金属板上.Mxl8曳引机没有装备动态的制动电路,松制动器要十分小心,不能让溜车速度太快.c) 轿厢空载,短时松开制动器一下,确认电梯向下溜,轿厢比对重重一点.d) 轿厢空载,调节hcb的1wde(offset)至5-1菜单显示0%载荷.e) 轿厢空载,调节hcb的1wdf(gain)至5-l菜单显示50%载荷f) 卸掉半载(轿厢空载),调节hcb的1wde(offset)至5-1菜单显示50%载(因为此时轿厢与对重大致平衡).注意:如果实际情况与上述的不同,则调整称重不但要考虑轿内载荷,还要考虑轿厢与对重的平衡情况根据安装手册继续余下的工作.3 快车调试3.1细调lwda) 空载时,检查轿厢和轿底1wd的安装.b) 电压表一极接1wd(+),一极接agnd(-)c) 轿厢空载,调1wed至1.0v(+/-0.0lv),而且菜单5-1显示00d) 50%载荷:调1wdf至2.5v(+/-0.0lv),而且菜单5-1显示50.e) 打下rdf开关,拨出1wd插,检查lce菜单5-1的显示应低于-15%(如-20%)f) 如果菜单5-1的显示大于-15%(如-2%),应增大称重感应器到感应片之间的距离,并重调.参看E—lineMinlSpace安装手册12.10章节.3.2 SETUPa) 将rdf拉下,驱动电梯至底层或稍低一点.检查lcecpu板上30,61:u,77:n,?7:s灯亮.b) 技菜单5-2-l,蜂鸣响起:间歇的长音.rdf打上,电梯自动慢速向上.c) 如果电梯中途停下,会显示故障代码(111---116)d) 如果setup成功,将显示顶层楼楼层,电梯从Setup运行模式进入正常运行模式.3.3 测量马达力矩3.3.1平衡系数:a) 轿厢50%载荷,从底层向顶层快速运行,到达顶层后拉下rdf,记下6-71(马达力矩)读数(不带符号).b) 打上Rdf,从顶层向底层快速运行,到达底层后拉下rdf,记下6-71(马达力矩)读数(不带符号).c) 两次读数应很接近,两者的差(上减下)就是Balance error(平衡误差),该差值x额定载重量=??kg,就是半载轿厢与对重的重量差.d) 如果上行读数大,应增加对重的重量.c) 如果下行读数大,应减小对重的重量.f) 如果改变了对重的重量,则重新比较读数.3.3.2检查驱动参数:空车向上全程运行,到顶层停车后拉下rdf,检查6-71(马达力矩),不应小于0.6.空车向上全程运行,到顶层停车后拉下rdf检查6-71(马达力矩),不应小于1.2.否则应重复步骤(2.3),某些参数或电位器可能设置不对.细调和测试本章包含下列主题:舒适感,运行效率,停层精度,曳引试验和缓冲器试验.并不意味着每一台电梯都要一页一页地,系统地执行本章所有内容,如果你在上述某个主题有问题,只需根据相关主题的步骤执行.4.1舒适感:注意:本章所有参数都对电梯舒适感有影响,能达到的最好效果需要综合所有参数来调试.某些参数调好后不需要再调.同时,机械部分必须正确安装(导轨,平衡系数,轿厢及隔震,导靴)4.1.1震动a) 制动器调节:制动器衬垫不得与制动轮摩擦.b) 细调Resolver角度(Q2马达不需要做):电梯开到顶层,每2度增大或减少菜单6—22的值(<+/-20度),快车乘坐感觉尤其注意加减速过程.总是从同一层向下测试,用菜单6-99保存,并记录在移交文件里以便更换HCB板时需要.c) 速度控制:减小p或增大i能减轻可能的震动,但同时使干层精度变差.6-1(p Factor)=2.5,以0.5逐次减小,细调时用更小步.6-2l(I Factor)=0.1s,以0.1逐次增大.细调时用更小步.用菜单6-99保存d) 如轿厢有高频振动,可增大Tacho软件滤波时间Tacho filter time(6-32=15ms),用菜单保存.4.1.2 启动空车下行检查马达开始转动时制动器应先打开.可调整启动延时Start delay(6-33,默认值4CDH-0.3秒),不应太大,以免影响电梯的效率,用菜单6-99保存.回溜或很“冲”: 调之前Setup应以做好,因为驱动系统必须知道井道楼层位置数据.a) 首先检查电梯的平衡系数.b) 再检查称重信号,如需要重新调整1wd.c) 轿厢半载.d) 记下6-33启动延时值,将其暂时改为1秒.e) 记下6-1 p factor的值,如大于1.5将其暂时改为1.5.f) 在井道中部,调整6-24 Balance error(平衡偏差-0.2---0.2,每次改变0.02)直至rdf在两个方向启动都好,用菜单6-99保存.s) 在底层,检查6-26 Rope weight(钢丝绳重量),如有补偿链=0,如没有=3.0,每次改变0.5使慢车上行无回溜,如上行有回溜则调大,用菜单6-99保存.h) 使轿厢空载.在底层慢车上行调6-23(start torque scaling,默认值=1.00),每次改变0.05使慢车上行无回溜,均从底层启动,每次间隔10秒以确保启动LWD 信号稳定.调好后用菜单6-99保存.i) 在顶层下行调6-27(cai-cable weight随行电缆重量,默认值=0),每次改变0.5.均从项层启每次间隔10秒以确保启动时LWD信号稳定,调好后用菜单6-99保存.j) 恢复6-1 P factor和6-33 Start delay原值,用菜单6-99保存.4 .1.3平层停车最后爬行距离(时间)调节,6-28(Final jerk distance)=125mm,减小6-28使平层更有效率,增大使平层更平滑.4.2电梯运行效率4.2.1 加速度参数(仅在必要时才更改,加速度影响77:U/N的位置)4.2.2 最后爬行距离(时间),6-28(Final jerk distance)=125mm,没有提前开门时4.3 平层精度4.3.1 正常运行的平层精度(注意调节参数P过大或I参数过小可能会引起振动)a) KTW/Q参数:默认值2.8,如果额定载重大(超过(1000kg)可调节参数最大至3.5,每次改变后都检查平层精度,同样用6-99保存,KTW/Q=(轿厢+吊架+门机构+装修+对重)的重量/额定载重.b) P(6-1)每次增加0.5,如细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) Final jerk distance(6-28)调整,参看4.1.34.3.2再平层精度(注意:调节参数P过大或I过小可能会引起振动)a) 如果只是个别楼层的再平层不好,先检查6l:u/n的重叠量.b) p(6-1)每次增加0.5,细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) 增加Relevelling correction distance(6-29).最后用菜单6-99保存.4.4曳引试验参看Mini Space安装手册中的空载曳引试验的125%的曳引试验及制动试验.a) 按菜单6-72(enable traction test)曳引测试=1,该功能放宽了速度监察,只对第一次运行有效.b) 根据安装手册进行测试.c) 如果马达不够力:1)记录下HCB板Mxtorq(+),AGND(-)之间的电压.2)调高0.5v(注意:不能趄过4.8V,如果马达转动不了,不应驱动马达超过2至3秒)3)重新进行测试4)如果马达仍不能动,再0.5V调高0.5V(注意:不能超过4.8v,如果马达转动不了,不应驱动马达超过2至3秒)5)重新进行测试6)测试完成,恢复你改动过Mxtorq电压.4.5缓冲器测试(满速冲击测试,仅在必要时才做)4.5.1对重缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门b)按6-73(缓冲器测试功能,只有效一次).c)打上RDF,按顶层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器有无损坏.4.5.2轿厢缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门.c) 按6-73(缓冲器测试功能,只有效一次).d) 打上RDF,按底层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器的无损坏.4.6马达电流测量测量HCB板上的(+)Meas和(-)Agnd之间的电压,Ivac=30A(如果驱动单元是40A)或lvac=60A(如果驱动单元80A)5故障排除5.1 V3f25故障代码:参看E—line Mini Space安装手册,在逆变板(1nverter board)上有三个红色LED灯,分别表示电流过大(SCL),制动电阻故障(BRSL),中间直流电压监察(DCL),同时在LCECPU板上显示故障代码5.2平层感应器:30,61u/n感应器之间必须装隔离片.5.3 HCB板复位:如果HCB板根本不工作且持续复位(你会听到蜂鸣报警),检查RESLOVER连线和接头.5.4 Reslover角度:当出现以下情况时:a)轿厢和钢丝绳已经装好.b)轿厢空载,对重被支撑着,因此松闸时对重不能被提起.c)Resslover角度未调.你可能无法移走对重下的支撑架,在这种情况下,有两重方法可以试一试(此时不允许有人在井道工作):a) 使用6-70自动检测角度,向下开动.b) 从360度开始,每隔30度试角度,向下开动.直到能提起对重,移走支撑架.然后依照2.7自动检测geslover 角度.5.5更换HCB(参看AS-11.65.1)a) 用菜单6-62记下旧板的旋转变压器的角度,关电换新板.b) 设置6-62为0并按6-98(电梯处于RDF模式,停于底层)设置默认参数.c) 根据现场电梯规格调节菜单6-3至6-7.(对于q2马达,调节6-3至6-8,6-60=12)d) 设置6-62为旧的旋转变压器角度,按6-99保存.c) 核对列表数据(对于q2马达,核对6-10)检查Mxtorq电压(+/-0.01V),调rtorq.f) 调节TAC电压等于6-11(37.3mm)或6-12(75mm):拔下XC /l-2,将S5跳线从2-3移至l-2位置,测量TAC(+)和AGND(-),调节Tacho电位器,误差+/-0.01,调好后恢复S5和XG.g)调节TSPL电压等于6-13所示值(+/-0.01v),测量TAPL+和ANGD-,调节RSPL.h)调节LEDi)做SETUP5.6 TAC和TSPL电压计算参看英文原版(AM-11.65.15),(0%=1v,20%=1.6v,50=%2.5v,100%=4v,110%=4.3v)附录1:Lce菜单6中的v3f25参数(图号:713983)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
备注 延时 8 秒熄灭 延时 8 秒熄灭 延时 8 秒熄灭 工作时要确保安全
8
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.6
电流检测板 385A:3
4 调试前准备工作
4.1 调试前的检查
开始调试前,检查以下的工作已完成:
项目 *1 *2 3 *4 *5 *6 *7 *8 *9 10 *11 12 *13 *14 *15 检查内容 具备调试用电(临时/永久)及电源开关 机房/井道/轿顶须有适当照明设施(临时或永久) 控制柜须妥善安装在适当位置 所有接线(控制柜, 限速器, 主机等)必须完成 主机及导向轮安装完成及调整正确 # 轿厢/轿架/导靴/导轨/钢丝绳须安装完成正确 # 制动器须调校完成及正确有效 限速器及缓冲器须安装完成及正确有效 安全钳须安装正确及有效 # 所有厅门须安装完成及能自由关闭 减速箱及缓冲器油量须正确加满 井道, 井底及机房须清理妥当 随行电缆须正确安装 轿厢安全回路须接通及有效 机房门锁完好有效,门扇应设置向外开启
4
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.3
HCB 板介绍 3.3.1HCB 板(781380G01) 介绍
图为
HCB 板结构图
5
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.3.2 HCB 板(781380G02) 介绍
滤波模块(389)
主接触器 (201:1, 2) 122 变压器
制动器控制模 块(385:A5)
V3F18 包括: 1. HCB:动作控制板 385:A1 2. 逆变器板 385:A2 3. 电流测量板 385:A3 4. 风扇 303 5. 变压器 89 6. 中间直流电路电容器 385:C1,C2 7. 大功率晶体管 385:V1...V3 8. 制动三极管 385:V4 9. 二极管整流桥 385:V5 10. 制动器控制模块 385: A5
3 驱动介绍
3.1 V3F25(S)简介
供电 …4 1 5 380 VAC 中间电压 530...650 VDC 马达供电 0...380VAC 0...20 Hz
L 1 L L 2 3
r s t
AC DC
DC
M
AC
旋转变压器
Fi l t er
R
V3F25
module Electronics
a c d. wmf c
6
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.4 385A2 介绍
7
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.5 LED 指示介绍
HCB(385:A1) 77:U 61:N 61:U 77:N 77:S INSP.DRIVE NORMAL RUN RELEV. RED.SPEED HALF SPEED UP START DOWN START TPOL RPOL MAIN CONT BRAKE SP.LIMIT PICK UP RXD TXD INVB(385:A2) DCL SCL BRSL BRL DANGER 亮 电梯在上部减速区域内 61:N 在感应片内 61:U 在感应片内 电梯在下部减速区域内 电梯在顶层或底层同步区域内 LCE 发出检修或 RDF 运行命令 LCE 发出正常运行命令 LCE 发出再平层命令 Correction Drive 校正运行 (找平层) LCE 发出低额定速度命令 上启动命令 下启动命令 电梯上行 电梯上行 允许主接触器吸合 打开制动器命令 加速时:速度<0.1m/s 减速时:速度<0.3m/s 在可能的减速点前总是有效 闪烁时表示 V3F 在接收数据 闪烁时表示 V3F 在发送数据 亮 中间直流电压过高或过低 马达电流超出范围 制动电阻损坏 制动晶体管控制脉冲 ON 主电路及逆变板有高压 加速时:速度>0.1m/s 减速时:速度>0.3m/s 灭 电梯不在上部减速区域 内 61:N 不在感应片内 61:U 不在感应片内 电梯不在下部减速区域 内 电梯在同步区域外 备注 上减速磁开关 电梯在门区 2 内 电梯在门区 2 内 下减速磁开关
3
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.2.2 V3F18 的组成
电流测量板
动态制动
中间直流电路 电容器(385: C1,C2)
制动三极管 (385:V4) 大功率晶体管 (385:V1...V3) PCB 模块 (385:A1, A2)
风扇
注意!仅用于 40A 的模块
制动电阻 306
385: A3
制动三极管
385: V4 385: A2 385: V3 385: C4
3.1.2 V3F25(S)的组成
V3F25(S)包括: 1. HCB:动作控制板 385:A1 2. 逆变器板 385:A2 3. 电流测量板 385:A3 4. 风扇 303 5. 变压器 89 6. 中间直流电路电容器 385:C1,C2,(C3, C4) 7. 大功率晶体管 385:V1...V3 8. 制动三极管 385:V4 9. 二极管整流桥 385:V5 10. (内部)制动电阻 306。只用 于 40A 的 V3F25 中
V3F25 简图 2 培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
3.1.1 V3F25(S)规格
速度: 1.0…2.5m/s 载重: 1000Kg ~5000Kg(根 据速度的不同最大载重也不 同) 启动次数: 240/小时 加减速度 0.6,0.8,1.0m/s2 平层精度:+/-5mm max.
385: C2
385: A1
IGBT 晶 体管
385: V2 385: V1 385: C1
电 容 器
二极管 整流桥
385:V5
385: C3
303
89 变压器
风扇
V3F25 驱动单元结构图
3.2
V3F18 简介
3.2.1 V3F18 的原理
V3F18 是通力较新的驱动系统之一,它基于 V3F25 基础上。V3F18 用于控制同步马达(以 同步转速旋转,没有滑差),其工作原理是以 AC/DC 和 DC/AC 转换为基础的 V3F(Variable Voltage Variable Frequency). 首先交流电经整流进入中间电路,形成稳定的直流电压,经过滤波后存储在电容中。当马达运 行时,中间电路稳定的直流电重新转化成交流电, 但这时的电压和频率会根据速度给定和 TACHO 的反馈分别设定。
安装班组 调试小组
复检日期及签署
9
培训教材 仅供参考 不得外传
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试 检查接线 检查马达接线
通力电梯产品调试技能培训
——驱动系统
V3F18/25 介绍及调试
目录
1 2 3 教材的有效性------------------------------------------------2 电气安全----------------------------------------------------2 驱动介绍--------------------------------------------------- 2 3.1 V3F25(S)介绍------------------------------------------- 2 3.2 V3F18 介绍----------------------------------------------4 3.3 HCB 板介绍----------------------------------------------5 3.4 逆变板 385A:2 -------------------------------------------7 3.5 LED 指示介绍--------------------------------------------8 3.6 电流检测板----------------------------------------------9 4 调试前准备工作----------------------------------------------9 4.1 调试前的检查--------------------------------------------9 4.2 检查接线------------------------------------------------10 5 慢车调试----------------------------------------------------13 5.1 设置驱动型号---- ---------------------------------------13 5.2 设置驱动参数--------------------------------------------13 5.3 设置 6- 38 参数------------------------------------------14 5.4 调整测速计的测试电位计----------------------------------14 5.5 检查 MXTORQ---------------------------------------------15 5.6 检查旋转编码器的极性------------------------------------15 5.7 检查测速计极性------------------------------------------15 5.8 旋转编码器相角初始化------------------------------------15 6 快车调试----------------------------------------------------16 7 蜂鸣器报警--------------------------------------------------17 8 V3F18/25 参数表---------------------------------------------18 9 V3F25 与 V3F25S 的区别---------------------------------------19 10 V3F25S 参数表-----------------------------------------------20