PMIC看门狗的应用
常用看门狗芯片

常用看门狗芯片常用看门狗芯片是一种用于监控和保护计算机系统的重要硬件设备。
它可以监测计算机系统的运行状态,并在系统出现故障或异常时采取相应的措施,确保系统的稳定运行和安全性。
一、看门狗芯片的工作原理看门狗芯片主要由计时器和复位电路组成。
计时器负责计算计算机系统的运行时间,当计时器达到预设的时间阈值时,会产生一个复位信号,通过复位电路将计算机系统重新启动。
如果计算机系统正常运行,会定期喂狗,即重置计时器,避免产生复位信号。
而如果计算机系统出现故障或异常,无法定期喂狗,计时器将超过预设的时间阈值,产生复位信号,将系统重新启动,从而恢复到正常工作状态。
二、看门狗芯片的应用场景1. 服务器系统:在服务器系统中,看门狗芯片可以监测服务器的运行状态,当服务器出现死机或崩溃时,看门狗芯片会自动进行系统复位,确保服务器的稳定运行。
2. 嵌入式系统:在嵌入式系统中,看门狗芯片可以监测嵌入式设备的运行状态,当设备出现故障或异常时,看门狗芯片会自动进行复位,保证设备的正常工作。
3. 工控系统:在工控系统中,看门狗芯片可以监测工控设备的运行状态,当设备出现故障或异常时,看门狗芯片会自动进行复位,确保工控系统的稳定运行。
1. 稳定可靠:常用看门狗芯片采用高品质的元器件和先进的制造工艺,具有较高的稳定性和可靠性,能够长时间稳定工作。
2. 灵活可调:常用看门狗芯片可以根据不同的需求进行设置和调整,包括计时器的时间阈值、复位电路的复位方式等,以适应不同系统的要求。
3. 低功耗:常用看门狗芯片采用低功耗设计,能够在保证系统稳定运行的同时,降低能耗和发热量,延长设备的使用寿命。
4. 兼容性强:常用看门狗芯片具有良好的兼容性,可以与各种不同的计算机系统和嵌入式设备进行集成,方便应用和使用。
5. 成本低廉:常用看门狗芯片采用成熟的制造工艺和大规模生产,具有较低的成本,适用于大规模应用和推广。
四、看门狗芯片的发展趋势随着计算机技术的不断发展和应用领域的不断拓展,看门狗芯片也在不断创新和改进。
嵌入式系统中看门狗的使用总结
嵌入式系统中看门狗的使用总结最近需要在板子上加上一块WatchDog,以确保在系统出错时自动重启,所以看了一些在嵌入式系统中使用看门狗的资料,现在总结如下:一、看门狗原理在产品化的嵌入式系统中,为了使系统在异常情况下能自动复位,一般都需要引入看门狗。
看门狗其实就是一个可以在一定时间内被复位的计数器。
当看门狗启动后,计数器开始自动计数,经过一定时间,如果没有被复位,计数器溢出就会对CPU产生一个复位信号使系统重启(俗称“被狗咬”)。
系统正常运行时,需要在看门狗允许的时间间隔内对看门狗计数器清零(俗称“喂狗”),不让复位信号产生。
如果系统不出问题,程序保证按时“喂狗”,一旦程序跑飞,没有“喂狗”,系统“被咬”复位。
这就好比你的身边有一只时刻饥饿的狗,你不按时给它肉吃,它就会吃你的肉,你被吃了......挂了,投胎转世,彻底重新做人了。
不幸的是来世你还得喂狗-_-!!二、看门狗的种类在现在的嵌入式系统中主要可以分为两种类型的看门狗:1、CPU内部自带的看门狗:此类看门狗一般是将一个芯片中的定时器来作为看门狗,通过程序的初始化,写入初值,设定溢出时间,并启动定时器。
程序按时对定时器赋初值(或复位),以免被咬。
这种看门狗是可以被禁用的(只要停止这个定时器即可),好比对那只要咬你的狗来个“葵花点穴手”。
大部分CPU都内置看门狗,硬件原理可参考各芯片数据手册。
优点:可以通过程序改变溢出时间;可以随时禁用缺点:需要初始化;如果程序在初始化、启动完成前跑飞或在禁用后跑飞,看门狗就无法复位系统,这样看门狗的作用就没有了,系统恢复能力降低。
2、独立的看门狗芯片:这种看门狗主要有一个用于喂狗的引脚(一般与CPU的GPIO相连)和一个复位引脚(与系统的RESET 引脚相连),如果没有在一定时间内改变喂狗脚的电平,复位引脚就会改变状态复位CPU。
此类看门狗一上电就开始工作,无法禁用。
现在常用的芯片有:CAT705/CAT706、IMP706等等,溢出时间在1.6秒左右。
看门狗工作原理、应用和设计思路解析
看门狗工作原理、应用和设计思路解析看门狗,又叫watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
此狗非彼狗工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。
所以在使用有看门狗的芯片时要注意清看门狗。
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。
那么定时时间到后就会使单片机复位。
常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等.软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。
我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。
对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。
在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。
而T1的中断正常与否我们再由。
PMIC安全机制系列之“看门狗”
PMIC 安全机制系列之“看门狗”摘要:电源管理集成电路(Power Management Integrated Circuits PMIC)稳压器具有可配置性、可编程性、高集成度和高效率的特点。
精确的上下电时序、低压差、同步升降压可确保优化功耗,为汽车和工业提供可扩展的、安全且灵活的解决方案。
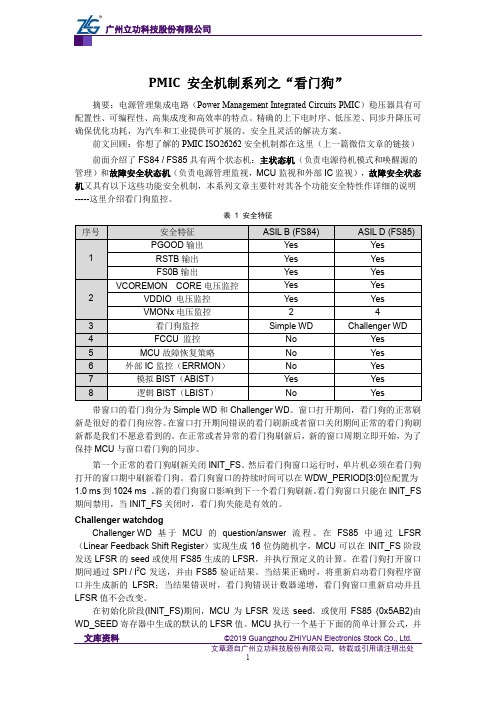
前文回顾:你想了解的PMIC ISO26262安全机制都在这里(上一篇微信文章的链接)前面介绍了FS84 / FS85具有两个状态机:主状态机(负责电源待机模式和唤醒源的管理)和故障安全状态机(负责电源管理监视,MCU监视和外部IC监视),故障安全状态机又具有以下这些功能安全机制,本系列文章主要针对其各个功能安全特性作详细的说明-----这里介绍看门狗监控。
表 1 安全特征带窗口的看门狗分为Simple WD和Challenger WD。
窗口打开期间,看门狗的正常刷新是很好的看门狗应答。
在窗口打开期间错误的看门刷新或者窗口关闭期间正常的看门狗刷新都是我们不愿意看到的。
在正常或者异常的看门狗刷新后,新的窗口周期立即开始,为了保持MCU与窗口看门狗的同步。
第一个正常的看门狗刷新关闭INIT_FS。
然后看门狗窗口运行时,单片机必须在看门狗打开的窗口期中刷新看门狗。
看门狗窗口的持续时间可以在WDW_PERIOD[3:0]位配置为1.0 ms到1024 ms 。
新的看门狗窗口影响到下一个看门狗刷新。
看门狗窗口只能在INIT_FS 期间禁用,当INIT_FS关闭时,看门狗失能是有效的。
Challenger watchdogChallenger WD基于MCU的question/answer流程。
在FS85中通过LFSR (Linear Feedback Shift Register)实现生成16位伪随机字,MCU可以在INIT_FS阶段发送LFSR的seed或使用FS85生成的LFSR,并执行预定义的计算。
在看门狗打开窗口期间通过SPI / I2C发送,并由FS85验证结果。
MSP430单片机的看门狗使用方法

MSP430单片机的看门狗使用方法
以MSP430F2274 为例。
其中汇编实现采用的是IAR 汇编,CCE 汇编实现稍作修改即可。
1. 看门狗有三种工作模式:停止模式,计时器模式,看门狗模式。
2. 其中后两种模式可以选择的时钟源有:SMCLK 和ACLK。
3. 在使用后两种模式时候要注意单片机所处的状态下看门狗能否工作,如单片机处在LPM3 时候只有ACLK 时钟,处在LPM4 下,没有时钟可以使用。
4. 看门狗模式的使用方法:当看门狗计数溢出时,程序复位。
在程序中开启看门狗,在计数溢出前清空看门狗,或重置看门狗,以使其重新计数。
若程序
跑飞,看门狗可能没有被清空或重置,就会溢,使程序复位。
5. 在MSP430F2274 中,看门狗模式下可以计时最长为1s,若需要以更长的时间复位,可采取的方法,使用其他计数器,计数满后执行((void (*)()) RESET_VECTOR)();或计数满后往看门狗控制寄存器写个错误值或执行一条无效命令:如((void (*)())0x170)();0x170 是外围模块的一个地址,不可能是一个函数地址,所以执行此句将使程序复位。
停止模式:关闭看门狗
C 语言实现:WDTCTL = WDTPW + WDTHOLD
汇编语言实现:mov.w #WDTPW+WDTHOLD,&WDTCTL
计时器模式:作为一个计时器使用,计数器满产生中断时执行看门狗中断函数。
C 语言实现:
主程序中:开启看门狗计时器,如:WDTCTL = WDT_MDLY_8;或WDTCTL = WDT_ADLY_250;等。
看门狗应用
看门狗应用看门狗:看门狗是单片机的一种超时复位机制。
实际上看门狗是一个硬件的计时器,在到达一定的时间后令单片机复位,即程序从头开始重新运行。
在很多种单片机中都有看门狗,除了STC89系列单片机,还有凌阳等。
看门狗的功能:在工业应用中由于一些意外的原因,如电磁干扰、内部硬件错误等,造成单片机死机或陷入死循环中,这样可能会出现很严重的后果,这就需要一种自我检测复位的功能。
在对看门狗进行设置之后,它便开始计时。
在程序运行的过程中对计时器的值定时清零,这就是通常所说的“喂狗”。
如果程序运行正常,则看门狗由于可以及时得以清零,所以不会出溢出。
但是如果程序停滞或进行死循环,就使得看门狗不能清零(看门狗是硬件实现的,与程序的运行是无关的),从而在到达设定的时间后产生溢出,使单片机复位。
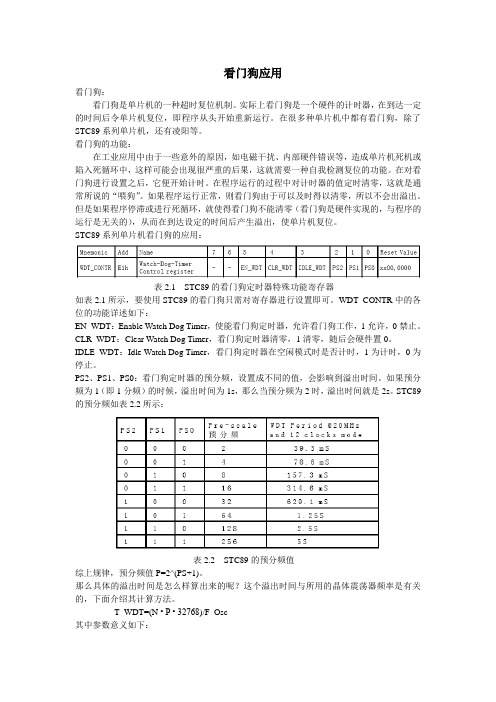
STC89系列单片机看门狗的应用:表2.1 STC89的看门狗定时器特殊功能寄存器如表2.1所示,要使用STC89的看门狗只需对寄存器进行设置即可。
WDT_CONTR中的各位的功能详述如下:EN_WDT:Enable Watch Dog Timer,使能看门狗定时器,允许看门狗工作,1允许,0禁止。
CLR_WDT:Clear Watch Dog Timer,看门狗定时器清零,1清零,随后会硬件置0。
IDLE_WDT:Idle Watch Dog Timer,看门狗定时器在空闲模式时是否计时,1为计时,0为停止。
PS2、PS1、PS0:看门狗定时器的预分频,设置成不同的值,会影响到溢出时间。
如果预分频为1(即1分频)的时候,溢出时间为1s,那么当预分频为2时,溢出时间就是2s。
STC89的预分频如表2.2所示:表2.2 STC89的预分频值综上规律,预分频值P=2^(PS+1)。
那么具体的溢出时间是怎么样算出来的呢?这个溢出时间与所用的晶体震荡器频率是有关的,下面介绍其计算方法。
T_WDT=(N • P• 32768)/F_Osc其中参数意义如下:T_WDT:溢出时间N:单片机的时钟数(所谓时钟数就是外部时钟的频率经过N分频后作为单片机工作的时钟,比如外部时钟频率是12M,如果单片机的时钟数N=12的话,那么单片机内部的工作时钟频率便为1M,STC89系列单片机有两种时钟数模式,6时钟与12时钟,当然不同的单片机可能有不同的时钟数,这在相应的芯片文档中会有所说明,如STC12系列单片机的时钟数为1时钟,即外部时钟频率就是工作频率,我们在这里对STC12单片机不作详述)P:就是上面所提到的看门狗定时器的预分频值。
看门狗芯片

复位操作,使系统重新启动
看门狗芯片的发展历程
• 早期看门狗芯片主要用于硬件系统,如计算机主板、通信设备等
• 随着嵌入式系统的普及,看门狗芯片逐渐应用于各种嵌入式设备,如微控制器、传
感器等
• 如今,看门狗芯片已经成为嵌入式系统中不可或缺的组成部分
看门狗芯片的工作原理及分类
看门狗芯片的工作原理
• 看门狗芯片内部有一个计数器,用于记录CPU发送的重置信号数量
• 防止程序长时间运行导致的系统资源耗尽
• 提高系统的可靠性和稳定性
• 防止系统故障无法及时发现和处理
看门狗芯片对嵌入式系统可靠性的提升
提高系统的可靠性
• 防止程序死机或跑飞导致的系统故障
• 提高系统的可靠性和稳定性
降低系统的维护成本
• 减少因系统故障导致的硬件损坏和维修成本
• 提高系统的可维护性和可扩展性
⌛️
04
看门狗芯片的未来发展趋势与挑战
看门狗芯片的技术发展趋势
01
高性能、低功耗的看门狗芯片
• 随着芯片技术的不断发展,未来的看门狗芯片将具有更
高的性能和更低的功耗
• 提高系统的稳定性和可靠性,降低系统的能耗
02
集成化的看门狗芯片
• 随着芯片集成度的提高,未来的看门狗芯片将与其他功
能模块集成在一起
保证汽车电子设备的稳定运行
• 避免因程序死机或跑飞导致的汽车电子设备故障
• 提高汽车电子设备的可靠性和稳定性
防止汽车电子系统资源耗尽
• 防止程序长时间运行导致的系统资源耗尽
• 防止系统故障无法及时发现和处理
降低汽车电子系统的维护成本
• 减少因系统故障导致的硬件损坏和维修成本
看门狗的原理和应用

看门狗的原理和应用1. 什么是看门狗?看门狗(Watchdog)是一种硬件或软件机制,用于监控和保护系统的稳定运行。
它类似于一个定时器,定期检查系统的状态,并在系统出现故障或崩溃时采取必要的措施,例如自动重启系统。
2. 看门狗的原理看门狗的原理主要基于以下几个方面:•计时器:看门狗通常内置一个计时器,用于记录系统的运行时间。
•喂狗操作:软件需要定期向看门狗发送喂狗信号,告诉它系统正常运行。
如果喂狗信号未及时发送,看门狗会认为系统出现问题。
•复位信号:当看门狗认为系统出现问题时,它会触发一个复位信号,导致系统重新启动。
3. 看门狗的工作流程看门狗的工作流程可以描述如下:1.系统启动时,看门狗开始计时。
2.软件定期发送喂狗信号,重置看门狗的计时器。
3.如果系统正常运行,重复步骤2。
4.如果软件未及时发送喂狗信号,看门狗的计时器将超时。
5.看门狗将触发复位信号,导致系统重新启动。
4. 看门狗的应用看门狗在许多领域都有广泛应用,以下是一些常见的应用场景:•嵌入式系统:嵌入式系统通常需要长时间稳定运行,看门狗可以在系统崩溃或死锁时自动重启系统,保持系统的稳定性。
•服务器管理:服务器是运行24/7的关键设备,看门狗可以检测服务器的状态,并在出现故障时重新启动服务器,确保服务的连续性。
•物联网设备:物联网设备通常地处边缘环境,稳定性是非常重要的。
看门狗可以监控设备状态,并在设备失效时采取必要的措施。
•工业自动化:在工业自动化过程中,看门狗可以监控设备运行状态,并在设备故障时采取措施,以防止生产线停机。
5. 注意事项在使用看门狗时,需要注意以下几点:•喂狗频率:喂狗信号的频率应根据系统的实际情况来确定。
喂狗频率过低可能导致系统误判为故障,喂狗频率过高则可能浪费系统资源。
•信号丢失:由于各种因素,喂狗信号有可能丢失。
在设计系统时,应考虑如何处理喂狗信号丢失的情况,以避免误判系统故障。
•重启过程:由于看门狗的触发会导致系统重新启动,因此需要谨慎处理重启过程中的数据保存和恢复操作,以免造成数据丢失或损坏。
MSP430F149的看门狗操作

MSP430F149的看门狗操作1)看门狗的图解图1 看门狗图解2)看门狗介绍看门狗由一个16位寄存器控制,高八位是密匙,密匙密码是05AH,读取是069H。
MSP430F149的看门狗是系统默认开启的,所有一般不用的时候,程序一开始就关闭看门狗。
看门狗有两种工作模式:1.看门狗模式。
2.定时器模式。
3)看门狗的控制寄存器1.WDTCTL●WDTPW:高八位是密匙。
一般IAR的头文件里面都包含有。
●WDTHOLD:选择是否打开看门狗。
0开1关。
●WDTNMIES:当复位端用作NMI(外部的非可屏蔽中断)的时候,选择是上升沿触发中断还是下降沿触发中断。
0上升1下降。
●WDTNMI:选择复位端是作为复位端口还是NMI(外部的非可屏蔽中断)端口。
0复位1NMI。
●WDTTMSEL:选择看门狗模式还是定时器模式。
0看门狗1定时器。
●WDTCNTCL:看门狗计数清零。
1清零。
●WDTSSEL:看门狗的时钟来源选择。
0子系统时钟1主系统时钟。
●WDTISx:看门狗时钟分频选择。
2.IE1●NIMIE:外部非可屏蔽中断使能。
●WDTIE:看门狗中断使能。
(当看门狗做定时器的时候也是这个使能)3.IFG1(一般C语言不操作,都会有硬件置位)●NMIIFG:外部非可屏蔽中断标志。
●WDTIFG:看门狗中断标志。
4)当看门狗用作定时器使用的时候的操作。
1.把看门狗设置到定时器模式。
(也还可以设置触发边沿,选择时钟和分频)2.清零看门狗。
3.打开看门狗中断使能。
#include<msp430x14x.h>#define uint unsigned intvoid main(){WDTCTL=WDT_MDLY_32;//相当于WDTPW+WDTTMSEL+WDTCNTCL//也就是密匙+选择定时器模式+清零看门狗IE1|=WDTIE;//打开看门狗中断使能,由于看门狗是非可屏蔽中断所有不用//打开总中断IEwhile(1){LPM3;}}#pragma vector=WDT_VECTOR//看门狗的中断入口地址是WDT_VECTOR,NMI的入口地址是NMI_VECTOR __interrupt void P1RT(void){//中断程序,硬件自动清除中断标志所有不用软件清除。
第7章 看门狗的应用
2.系统控制和状态寄存器(SCSI)
WDINTS:看门狗中断状态位,反映WDINT的状态。 WDENINT: 1--看门狗复位信号(WDRST)被屏蔽, 看门狗中断信号使能(WDINT); 0--看门狗复位信号(WDRST)被使能, 看门狗中断信号屏蔽(WDINT); WDOVERRIDE: 1--允许改变WDCR中的看门狗屏蔽位WDDIS; 0--不能改变WDDIS; 清零后只有系统复位才允许改变该位的状态,用户可读取该位状态
看门狗相关寄存器
1.看门狗控制寄存器(WDCR)
WD预定标设置位,其值为看门狗计 数时钟相对于OSCCLK/512的倍率。 逻辑校验位,必须写101,否则复位器件内核。 看门狗禁止位 (仅当SCSR的WD OVERRIDE位为1时有效) WD标志位,当看门狗使CPU复位时,该位置1,写1清除标志位。
为了提高系统的抗干扰能力,DSP芯片中使用了“看 门狗”技术来监视系统的软件和硬件。它可以在程序 跑飞时强制对系统复位或中断,使系统进入初始状态, 从而保证系统按要求运行。
看门狗模块框图
看门狗使用一个独立于CPU的定时器计数单元, 这个8位的看门狗计数器(WDCNTR),当计 数到最大值时看门狗模块产生一个输出脉冲 (512个OSCCLK时钟宽度),并可以中断或 复位DSP。因此,为了避免不必要的复位,用 户可以屏蔽计数器或周期地对看门狗复位控制 寄存器写“0x55+0xAA”序列(可以复位看门 狗计数器)。
KickDog(); EALLOW; SysCtrlRegs.WDCR=0x0028; //使能看门狗,WDCLK=OSCCLK/512/1 EDIS; For(;;) { //用户代码 … } } void KickDog(void) //喂狗程序,清零看门狗计数器 { EALLOW; SysCtrlRegs.WDKEY = 0x0055; SysCtrlRegs.WDKEY = 0x00AA; EDIS; }
看门狗

看门狗看门狗简介在嵌入式应用中,CPU必须可靠工作,即使因为某种原因进入了一个错误状态,系统也应该可以自动恢复。
看门狗的用途就是使微控制器在进入错误状态后的一定时间内复位。
其原理是在系统正常工作时,用户程序每隔一段时间执行喂狗动作(一些寄存器的特定操作),如果系统出错,喂狗间隔超过看门狗溢出时间,那么看门狗将会产生复位信号,使微控制器复位。
看门狗简介LM3S9B96微控制器有两个看门狗定时器模块,一个模块(Watch Timer0)由系统时钟作为时钟源,另一个模块(Watch Timer1)由PIOSC 作为时钟源。
除了WDT1处于不同的时钟域外,这两个模块是相同的。
每个看门狗定时器模块包括一个32位递减计数器、可编程的装载寄存器、中断产生机制和锁定寄存器。
一旦配置完看门狗定时器,可以用看门狗定时器锁定寄存器锁定看门狗,以防止软件以外地改写定时器配置。
看门狗定时器模块结构框图看门狗控制寄存器看门狗定时器加载寄存器,WDTLOADWDTLOAD(Watchdog Load),offset 0x000这个寄存器用来存储32位计数器使用的32位间隔值。
当该寄存器被执行写操作,新值立即被载入并且计数器从新值开始重新向下计数。
如果WDTLOAD寄存器被载入值0x0000.0000,则立即会产生一个中断。
看门狗控制寄存器看门狗定时器取值寄存器,WDTVALUEWDTVALUE(Watchdog Value), offset 0x004这个寄存器包含看门狗定时器的当前计数值看门狗控制寄存器看门狗定时器控制寄存器,WDTCTLWDTCTL(Watchdog Control),offset 0x008该寄存器可以配置看门狗定时器在第二次超时时产生复位信号或在超时时产生一个中断。
当看门狗中断被使能,所有后即的对该寄存器的写操作被忽略。
可以重新使能写操作的唯一机制是一个硬件中断。
看门狗控制寄存器看门狗中断清零寄存器,WDTICRWDTICR(Watchdog Interrupt Clear),offset 0x00C向该寄存器写入任何值都将清除看门狗中断状态并从WDTLOAD寄存器重新载入32位计数值。
看门狗芯片的选择与软件控制

”芯片的选择及软件控制看门狗”“看门狗作为一种解决微处理器因干扰而死机的有效方法,目前看门狗基本上已经成为MCU的必备辅助外围电路。
笔者在单片机应用开发中对于看门狗的使用积累了一定的经验,下面以看门狗在MCU系统中的应用为例,与同行们做一下交流。
看门狗的工作原理看门狗是由英文“WATCH DOG”翻译过来的,它的设计使用目的是做微处理器的一个监控者。
微处理器在运行中会受到各种各样的干扰,如电源及空间电磁干扰,当它们超过抗干扰极限的时候,就有可能引起微处理器死机。
尤其在MCU的应用环境中,更容易受到复杂干扰源的干扰影响。
有了看门狗这个监控,就能够在MCU死机后,重新使它复位恢复运行。
看门狗电路本身是一个带清除端和溢出触发器的定时器,如果不清除它,它就以固定频率发出溢出触发脉冲。
实际使用中把这个触发输出引入到MCU的复位端,使用MCU的一个I/O控制它的清除端。
看门狗的监控思路是:MCU正常运行时,软件被设计成定时清除看门狗定时器,而一旦MCU死机,这时认为MCU不再发出清除脉冲,看门狗定时器溢出,则自动复位MCU。
看门狗芯片的选择早期的看门狗电路一般都是使用NE555或者CD4060等定时芯片搭建的,直到目前,仍旧有一些书籍和刊物介绍这些电路,实际上它们早已被独立的看门狗芯片取代了。
提到看门狗,则必须提一下电源监控和上电复位电路。
为了使用者的方便,现在的芯片都把上电复位、电源监控及看门狗集成到一起,如IMP813L就是这样一款芯片。
还有的芯片更是把EEPROM也集成进去,如X5045芯片。
现在的MCU被集成了越来越多的功能,有的集成了看门狗,如PHILIPS的P89C51RX2,有的干脆把电源监控和上电复位及RC时钟也集成了进去,如PHILIPS的P87LPC762。
使用者可以根据自己所选择的具体MCU来配置外围看门狗电路及电源监控,除了对功能的选择外,使用看门狗还应该注意它的复位门限电压,一定要确保MCU在看门狗芯片的最小复位门限电压下可以正常工作。
PIC单片机之看门狗

PIC 单片机之看门狗
看门狗定时器
看门狗定时器(WDT,WatchDogTImer)是单片机的一个组成部分,它实际上是一个计数器,一般给看门狗一个数字,程序开始运行后看门狗开始倒计数。
如果程序运行正常,过一段时间CPU 应发出指令让看门狗复位,重新开始倒计数。
如果看门狗减到0 就认为程序没有正常工作,强制整个系统复位。
工作原理
使用时,WDT 将递增,直到溢出,或称超时。
除非处于休眠或空闲模式,WDT 超时会强制器件复位。
为避免WDT 超时复位,用户必须定期用PWRSAV 或CLRWDT 指令将看门狗定时器清零。
如果WDT 在休眠或空闲模式下超时,器件将唤醒并从PWRSAV 指令执行处继续执行代码。
在上述两种情况下,WDTO 位(RCON《4》)都会置1,表示该器件复位或唤醒事件是由于WDT 超时引起的。
如果WDT 将CPU 从休眠或空闲模式唤醒,休眠状态位(RCON《3》)或空闲状态位(RCON《2》)也会置1,表示器件之前处于省电模式。
看门狗电路应用基本技巧和注意事项
看门狗电路应用基本技巧和注意事项
一、前言
在MCU、DSP等应用中,广泛用的看门狗(WatchDog)电路,又称电压监控器电路,比如,IMP813L、X25045等,本文总结了看门狗电路应用中的一些基本技巧和注意事项。
二、看门狗电路基本技巧
1、系统电压
选择看门狗依据系统内部的电压轨,也就是说,根据MCU或DSP 的驱动电压来选择电压监控器。
2、看门狗输入端(WDI)
一旦MCU无法正常工作时,而且其片内看门狗功能也无法复位,软件进入死循环。
这时,具有集成看门狗功能的监控器可触发复位,从而提高系统的可靠性。
3、手动复位(MR)功能
借助该功能,可对电路进行手动复位,或者通过应用中的另一个器件来主动控制监控器电路。
4、有效高电平输出
如果处理器需要采用有效高电平复位输入,无需增加额外的器件就可实现。
5、电源故障输入/输出(PFI/PFO)
利用该比较器能够提供更大的灵活性,例如用来实现电池电量的长时间监测和电压跌落预警。
6、延迟时间
一定的延迟时间使得电压和电路中的其它器件能够在正常操作重新开始之前先稳定先来,降低电压波动,提高系统的可靠性。
7、通道数
一般而言,系统中所需的监控器功能的数量取决于处理器及外围器件的电压。
例如,独立电压的处理器有可能需要对两个电源轨进行监控,与此同时,系统中的存储器可能也需要进行监控并工作在第三
个(不同的)电压轨上。
8、芯片启动选通作用
一旦电源电压处于欠压状态时,看门狗电路的芯片启动选通功能能够防止错误数据使CMOSRAM发生劣化。
看门狗芯片工作原理
看门狗芯片工作原理一、引言看门狗芯片是一种常用于嵌入式系统的硬件设备,它能够监控系统运行状态并在出现故障时进行重启。
本文将从看门狗芯片的定义、应用场景、工作原理等多个方面详细介绍该芯片的工作原理。
二、看门狗芯片的定义看门狗芯片是一种专门用于监控嵌入式系统运行状态的硬件设备。
它可以在系统出现故障或死锁时进行重启,确保系统正常运行。
三、应用场景看门狗芯片广泛应用于各种嵌入式系统中,如智能家居、智能穿戴设备、汽车电子等领域。
这些系统需要长时间稳定运行,并且不能因为某个模块出现问题导致整个系统崩溃。
此时,看门狗芯片就起到了至关重要的作用。
四、看门狗芯片的工作原理1. 看门狗计时器看门狗计时器是看门狗芯片中最核心的部分。
它可以定期向CPU发送一个信号以确认CPU是否正常运行。
如果CPU无法响应该信号,则看门狗芯片会认为系统出现了故障,并在一定时间后进行重启。
2. 看门狗喂狗看门狗喂狗是指CPU定期向看门狗芯片发送一个信号以表明自己正常运行。
这个信号可以是任何形式,如写入某个特定的寄存器、执行某个特定的指令等。
如果CPU没有及时发送该信号,看门狗芯片会认为系统出现了故障,并在一定时间后进行重启。
3. 看门狗复位看门狗复位是指在系统出现故障时,看门狗芯片会向CPU发送一个复位信号以进行重启。
这个复位信号可以是硬件级别的,也可以是软件级别的。
4. 看门狗时间设置看门狗时间设置是指用户可以通过设置寄存器或其他方式来调整看门狗计时器的计时周期。
一般来说,该周期应该小于系统最长无响应时间,以确保在出现故障时能够及时进行重启。
五、总结综上所述,看门狗芯片作为一种专用于监控嵌入式系统运行状态的硬件设备,在各种嵌入式系统中都有广泛的应用。
其工作原理主要包括看门狗计时器、看门狗喂狗、看门狗复位和看门狗时间设置等方面。
通过对这些原理的深入了解,我们可以更好地理解看门狗芯片的作用和应用。
看门狗的作用

目前,在许多情况下,设计人员会用软件实现以往由硬件才能完成的电路功能,其中部分原因是低成本的微处理器(μP)为大家提供了广泛的选择。
软件常常是解决问题成本最低、灵活性最高的方案,但它也迫使设计人员进行一些额外的测试以确保系统的可靠性。
当然,如果程序没有代码错误也就不存在上述问题,细心的测试能够在1000条指令中减少1至10条错误。
而设计人员则希望在10,000条指令中出错率不要超过十处。
在台式机系统中出现导致系统瘫痪的软件错误并不可怕,因为用户只需重新启动系统即可,它只会造成少量数据的丢失。
然而,对于运行在工控系统的软件,系统则必须能够在没有人为干预的条件下恢复故障。
这一特性在两种情况下非常关键:一种是高有效性系统,如服务器、电话系统以及生产线等;另一种是高可靠性系统,因为这种系统一旦出现错误将造成伤害,如汽车、医疗设备、工业控制、机器人、自动门等。
即使不考虑这些要求严格的应用,系统在无需用户干预的条件下自动(按下复位键或重新上电)从故障状态下恢复也是很有益处的,这种设备的好处是显而易见的,因为用户不希望设备内部出现问题。
改善这类系统可靠性的一种简单、有效的措施是采用看门狗电路。
1看门狗看门狗实际上是一个计数器,它需要在一定的看门狗延时周期内被清零,如果没有清零动作,看门狗电路将产生一个复位信号以使系统重新启动或建立一个非屏蔽中断(NMI)并执行故障恢复子程序。
大多数看门狗电路是沿触发,这样,无论是上升沿还是下降沿触发看门狗的输入端(WDI)通常都能够清计数器。
WDI引脚一般连接在处理器的一个I/0口,这条口线可由软件触发。
图1所示是微处理器通过在WDl脚发送脉冲清除看门狗定时器以防止复位的连接方式,实际上,清看门狗计数器的命令必须在主程序内。
如果看门狗没有被清零,复位后软件将从地址为0000(启动程序)的子程序处开始运行。
计算主程序的运行时间往往很困难,因为在此期间可能需要多次调用子程序,这与系统输入有关。
看门狗平台应用与可靠性研究
看门狗平台应用与可靠性研究随着物联网技术的普及,越来越多的智能家居产品进入我们的生活。
智能家居产品中最为关键的一环就是安防系统,而安防系统中最为重要的模块便是监控。
为了实现监控的效果,人们需要用到监控软件和监控硬件。
其中,监控软件就是看门狗平台,它可以用于实现安防监控、物联网设备监控、工业控制和实验室安全等多个领域。
看门狗平台应用看门狗平台既可以作为智能家居的安防监控软件,也可以应用于医疗设备、机器人、智慧城市等诸多领域。
例如,在智慧城市领域,看门狗平台可以用于监控交通流量、城市公共区域安全等。
在医疗设备领域,看门狗平台可以用于远程监护、医疗设备维护等。
在机器人领域,看门狗平台可以用于监控机器人状态、维护机器人等等。
同时,看门狗平台可以实现对物联网设备的维护和管理。
物联网设备可以连接多台设备,但这些设备之间运行不稳定,很难保证整个网络的稳定性。
通过使用看门狗平台,这些设备可以得到有效的管理和监控,从而实现设备的稳定运行。
看门狗平台可靠性研究看门狗平台作为一个安防监控软件,在设计和使用时,需要考虑到以下几个方面的问题:一、可靠性看门狗平台需要保证系统的可靠性,避免系统崩溃或者误判等问题。
为了提高可靠性,看门狗平台需要考虑系统的容错能力。
如果系统出现了故障或者错误,看门狗平台需要有足够的能力检测并处理这些错误,同时,还需要保证处理这些错误的效率和准确性。
二、安全性看门狗平台需要保证系统的安全性,避免被黑客攻击或者数据泄露等问题。
为了提高安全性,看门狗平台需要考虑系统的加密和安全协议,并进行安全漏洞测试,保证系统的安全。
同时,看门狗平台还需要注意用户权限控制,避免用户在未经授权的情况下操作系统和数据。
三、稳定性看门狗平台需要保证系统的稳定性,避免系统频繁崩溃或者运行缓慢等问题。
为了提高稳定性,看门狗平台需要通过对系统进行测试和优化,降低系统出现故障的风险,同时还需要充分考虑系统的扩展性和负载能力,确保系统能够承受更大的请求量和更高的并发量。
嵌入式系统之WATCHDOG(看门狗)概述

1。
概述:WATCHDOG对于没有底层开发经验的开发人员来说,可能比较陌生,但是它在系统起到非常重要的作用,相当于系统警察,当系统发生严重错误(如程序进入死循环等)不能恢复的时候,W ATCHDOG能够让系统重启。
WATCHDOG的应用主要是在嵌入式操作系统中,避免了系统在无人干预时长时间挂起的情况。
2。
W ATCHDOG模块在比较高档的嵌入式硬件芯片中,都有一个W ATCHDOG模块,如果在MCU/MPU中没有集成W ATCHDOG,一般会在此嵌入式系统中加一个专门的W ATCHDOG芯片来实现WATCHDOG机制。
此模块主要的功能包括:1 提供WATCHDOG控制寄存器和配置寄存器,供软件开发人员根据系统需要进行灵活配置。
2 提供一接口,使应用软件能够定时给W ATCHDOG“喂狗”。
3 提供W ATCHDOG机制,当系统进入不可恢复错误时,能产生一个不可屏蔽中断来通知系统自动重启(一般这样,也有改变为其他处理方式的),只有相应的复位信号才能清除它。
3。
WA TCHDOG的实现方式:对于W ATCHDOG模块的实现,不同的硬件芯片有不同的方式,这里介绍2中工作方式:1。
利用系统操作系统时钟来实现WA TCHDOG在Intel XScale系列中,利用了操作系统时钟的比较寄存器3(OSMR3)做为WA TCHDOG 的运行主体,当系统的W A TCHDOG激活后,软件就必须在一定时间内从OSMR3读出当前的计数,然后加上一定的计数值(下一次到期的计数值),再写回到OSMR3中,软件一直周期性的重复这个过程,如果软件没有重新写入新的计数使定时器到期,此OSMR3会利用一个GPIO触发系统复位。
2。
芯片的专门W ATCHDOG模块对于现在的很多芯片,已经集成了专门的WATCHDOG模块,比如ARM11的芯片,WATCHDOG模块中,提供了比较灵活的配置和控制机制:A。
宽范围设置过期时间间隔,从0。
pmic应用场景

pmic应用场景PMIC(Power Management Integrated Circuit)即为功率管理集成电路,是一类主要用于移动电子设备、消费电子设备等的高度集成化的电源管理芯片。
本文将结合其技术特点,全方位为大家讲解pmic应用场景。
PMIC能够减少电源管理电路的复杂度,提升系统效率和性能,同时减小系统的体积和重量。
它的应用范围非常广泛,包括手机、平板电脑、笔记本电脑、智能手表、智能穿戴设备、家用电器等等。
手机手机作为移动终端的代表,PMIC可以在手机中发挥多种作用。
其中,一个显著的功能是:使手机每秒能够连接到数百个微小的射频信号,其中包括电话信号、无线网络信号、蓝牙信号等。
这需要一个可靠的电源管理电路来保证系统的稳定性并延长电池寿命。
因此,一个适当的PMIC架构能够为用户提供更好的使用体验并满足高效、低功耗的需求。
平板电脑平板电脑中使用的PMIC是必须具备快速响应速度和低功耗。
PMIC的功率转换效率对平板电脑电池寿命的影响比手机更重要。
快速充电功能也是平板电脑的一大优点。
大型电池的快速充电也需要更高效的PMIC芯片才能保证快速充电的同时保证电路的安全。
笔记本电脑在笔记本电脑中,PMIC起到更多的保护控制作用。
通常会为计算机各单元部件(主板、处理器、芯片组等)提供稳定的电源,以保证计算机的正常运行,提高性能和保证安全。
另外,还可以控制USB快速充电、小电池充电等一些特性。
智能手表和智能穿戴设备智能手表和智能穿戴设备不仅需要在使用体验上更加人性化和方便,而且要确保电池寿命,因此PMIC扮演了重要角色。
PMIC应用于智能手表和智能穿戴设备能够保持这些设备的最佳性能并且延长电池寿命,使它们具有更长的使用寿命和更佳的用户体验。
家用电器PMIC还广泛应用于家用电器领域,如智能灯具、智能电视、智能音箱等。
PMIC可提供高效、精准的电源管理解决方案,并减小系统的体积和重量,保证安全性和可靠性的同时,也能够提高设备的使用寿命。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PMIC 看门狗的应用
PMIC(Power Management IC)集成了电源管理、系统控制、电池管理、接口和音频功能及其他系统专用功能,可为各种设备提供最佳集成,其采用高性能处理技术,提供可延长电池使用时间并降低功耗的高效解决方案。
电源是系统的重要组成部分,电源的调试又是工程师们最头痛的问题之一,读者中有没有遇到过棘手的问题呢?最近,小编在调试某平台时,遇到一个很诡异的现象:PMIC输出几秒,突然又断开几秒,紧接着又开始输出,如此循环,并且很有规律性。
小编在分析问题之前,先展示一下这颗非常具有潜力的PMIC-FS8530器件。
PMIC最高支持ASIL-D的安全等级,其具有故障安全输出机制,支持多输出轨、输出电压可配置及工作频率和上电时序可设置,并且支持看门狗监控等体现安全的功能。
●三路低压Buck,两路线性稳压器(LDO);
●通过SPI或I2C接口进行配置和诊断执行;
●通过OTP编程进行配置;
●VPRE同步降压控制器,带有外部MOSFET,可配置的输出电压,开关频率,最高
10A峰值的电流能力;
●低压集成同步BUCK1/2转换器。
可配置的输出电压,电流能力高达3.6A峰值。
BUCK1/2的多相功能可在单轨上将电流能力扩展至7.2A峰值;
●具有独立监控电路的ASIL-D,用于MCU监控的专用接口,具有watchdog,复位
和中断,内置自检,故障安全输出功能。
回归正题,继续文章开始的问题。
开始排查了PMIC的Reset,Wake等信号,都没发现异常,鉴于输出波形的规律性,经过小编的苦苦研究,问题终于找到,原因出现在这里:由于OTP时启用了Challenger watchdog监视功能。
Challenger watchdog基于MCU的question/answer流程。
在FS8530中通过LFSR(Linear Feedback Shift Register)实现生成16位伪随机字。
MCU可以在INIT_FS阶段发送LFSR的seed或使用FS85生成的LFSR,并执行预定义的计算。
在watchdog OPEN窗口期间通过SPI / I2C发送,并由FS8530验证结果。
当结果正确时,将重新启动watchdog程序窗口并生成新的LFSR。
当结果错误时,watchdog错误计数器递增,watchdog窗口重新启动并且LFSR值不会改变。
在初始化阶段(INIT_FS)期间,MCU发送LFSR的seed,或使用由WD_SEED寄存器中提供的FS8530(0x5AB2)生成的默认LFSR值。
使用此LFSR,MCU根据以下公式执行简单计算,并将结果发送到WD_ANSWER寄存器。
watchdog错误策略适用于Challenger watchdog和Simple watchdog。
watchdog错误计数器在设备中实现,用来过滤不正确的watchdog刷新。
每次发生watchdog故障时,器件将此计数器递增2;每次正确刷新watchdog时,watchdog错误计数器将递减1。
此原则可确保循环“OK / NOK”行为收敛到故障检测。
为了实现应用程序的灵活性,此计数器的最大值可在INIT_FS阶段使用WD_ERR_LIMIT [1:0]位进行配置。
根据以上原因分析,解决该问题有两个方法:
1、使用Debug模式,此时,看门狗窗口完全打开,故障安全状态机的深度故障保护请求(DFS = 1)被屏蔽,RSTB引脚的8s定时器监控被禁用,不需要看门狗刷新(仅限于调试时使用);
2、MCU/CPU通过I2C/SPI在INIT_FS阶段发送LFSR的seed或使用FS8530生成的LFSR,并执行预定义的计算,避免watchdog错误次数达到预定值而复位,导致断断续续输出。
在清晰了PMIC工作的机制后,解决问题就水到渠成了。
在往常,看门狗一般应用于主控MCU的安全性监控,但随着汽车设计安全性的需求越来越高,节点系统的各个部分将拥有越来越多的安全机制,我们将在后续的文章中一一为大家呈现。