MAX813看门狗电路
C51单片机看门狗电路及程序设计方案

C51单片机看门狗电路及程序设计案院系:信息工程学院年级:2010级电子一班禹豪电子一班训虎电子二班邓启新一、引言在由单片机构成的微型计算机系统中,程序的正常运行常常会因为来自外界的电磁场干扰等原因而被打断,从而造成程序的跑飞,而陷入死循环。
由此导致单片机控制的系统无法继续工作,造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片或程序,俗称"看门狗"(watchdog)(1)看门狗电路基本原理看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连**,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
*此处设计原理实际上为下文中硬件看门狗设计思路。
(2)看门狗电路一般设计式“看门狗”电路一般分为硬件看门狗与软件看门狗两种设计式。
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位。
如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。
常用的WDT芯片如MAX813,5045,IMP 813等,价格4~10元不等.软件看门狗技术的原理和硬件看门狗类似,只不过是用软件的法实现(即利用单片机部定时器资源,通过编程模拟硬件看门狗工作式),以51系列为例:因在51单片机中有两个定时器,在利用部定时器资源来对主程序的运行进行监控时。
看门狗MAX705、706、813中文说明
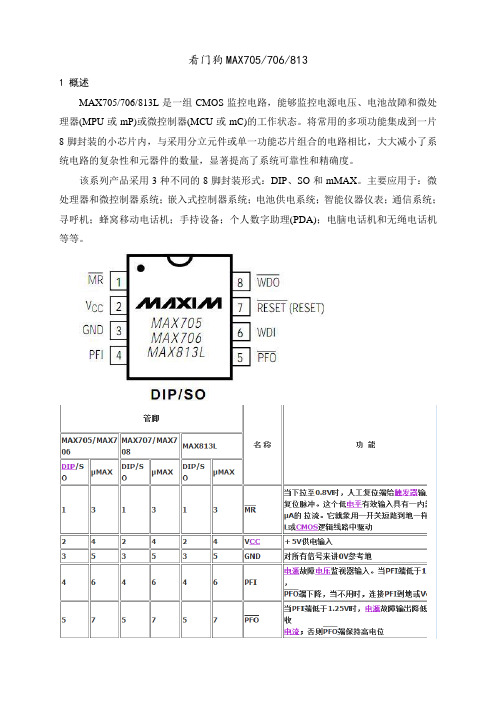
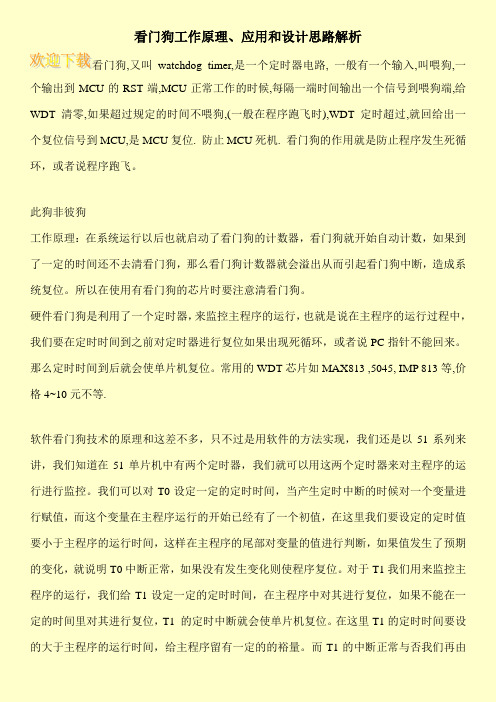
看门狗MAX705/706/8131 概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
2 功能说明2.1 RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
如果在已经开始的复位脉冲期间出现电源跌落,复位脉冲至少再维持140ms。
在掉电期间,一旦电源电压Vcc降到复位门限以下,只要Vcc不比1.0V还低,就能使RESET维持电压不高于0.4V的低电平。
MAX705和MAX706提供的复位信号为低电平RESET,而MAX813L提供的复位信号为高电平RESET,三者其它功能完全相同。
有些单片机,如INTEL的80C51系列,需要高电平有效的复位信号。
2.2 看门狗定时器MAX705/706/813L片内看门狗定时器用于监控MPU/MCU的活动。
看门狗工作原理、应用和设计思路解析
看门狗工作原理、应用和设计思路解析看门狗,又叫watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
此狗非彼狗工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。
所以在使用有看门狗的芯片时要注意清看门狗。
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。
那么定时时间到后就会使单片机复位。
常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等.软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。
我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。
对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。
在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。
而T1的中断正常与否我们再由。
如何设计看门狗(硬件看门狗与软件看门狗)
看门狗电路的概念和作用2007/08/05 15:26一般看门狗电路用来监视MCU内部程序运行状态,在程序跑飞或死锁情况下,可以自动复位。
不过由于厂家、型号不同可能有些差别。
看门狗电路的工作原理是:当系统工作正常时,CPU将每隔一定时间输出一个脉冲给看门狗,即“喂狗”,若程序运行出现问题或硬件出现故障时而无法按时“喂狗”时,看门狗电路将迫使系统自动复位而重新运行程序。
主要作用是防止程序跑飞或死锁看门狗电路其实是一个独立的定时器,有一个定时器控制寄存器,可以设定时间(开狗),到达时间后要置位(喂狗),如果没有的话,就认为是程序跑飞,就会发出RESET指令在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"看门狗电路电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位.看门狗,又叫 watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
单片机看门狗(Watchdog)的工作原理及其应用
单片机看门狗(Watchdog)的工作原理及其应用2010年05月16日星期日 23:00在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环。
程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果。
所以,出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"(watchdog)。
看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行。
这个时候,看门狗电路就会由于得不到单片机送来的信号。
便在它和单片机复位引脚相连的引脚上送出一个复位信号。
使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
看门狗,又叫 watchdog timer,是一个定时器电路。
一般有一个输入,叫喂狗(kicking the dog or service the dog),一个输出到MCU的RST端,MCU 正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零。
如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就会给出一个复位信号到MCU,是MCU复位,防止MCU死机。
看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。
所以,在使用有看门狗的芯片时要注意清看门狗。
C51单片机看门狗电路及程序设计方案解读
C51单片机看门狗电路及程序设计方案院系:信息工程学院年级:2010级电子一班刘禹豪电子一班赵训虎电子二班邓启新一、引言在由单片机构成的微型计算机系统中,程序的正常运行常常会因为来自外界的电磁场干扰等原因而被打断,从而造成程序的跑飞,而陷入死循环。
由此导致单片机控制的系统无法继续工作,造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片或程序,俗称"看门狗"(watchdog)(1)看门狗电路基本原理看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连**,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
(2)看门狗电路一般设计方式“看门狗”电路一般分为硬件看门狗与软件看门狗两种设计方式。
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位。
如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。
常用的WDT芯片如MAX813,5045,IMP 813等,价格4~10元不等.软件看门狗技术的原理和硬件看门狗类似,只不过是用软件的方法实现(即利用单片机*此处设计原理实际上为下文中硬件看门狗设计思路。
内部定时器资源,通过编程模拟硬件看门狗工作方式),以51系列为例:因在51单片机中有两个定时器,在利用内部定时器资源来对主程序的运行进行监控时。
MAX705 706 813中文参考资料(详细)

MAX705/706/813中文资料。
基本参数:工作电压范围:1.0~5.5V电源电流:150~350uA复位闵值:4.25~4.5V复位脉冲宽度:140~280(ms)输出电压:0.4V看门狗超时周期:1.6sec上拉电流:100.~600uAMR脉冲宽度:150(ns)MR输入闵值:0.8~2.0VPFO输出电压:-1.5~0.4V存储温度范围:-65°C ~160°C工作温度范围:-40°C ~ 85°C焊接温度范围:+300°C安装类型:表面贴装引脚图概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU 或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
功能说明RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
单片机复位看门狗电路
705系列复位电路#概述GC705/706/707/708/813L是一组CMOS微处理器监控电路,可用来监控微处理器系统供电异常、电池故障和工作状态。
和采用分立元件及多片IC组合成电路相比,明显减小了系统电路的复杂性和元器件的数量,并提高了系统的可靠性和精度。
GC705/706/813L具备以下四项基本功能:1)电源开机,关机及电源供电不足时给出复位输出。
2)内含独立的看门狗电路输出。
如看门狗电路输入在1.6秒内未得到翻转信号,看门狗电路输出端将变成低电平。
3)内含门限1.25V的检测器,用于掉电报警,电池欠电监测和监测加错电源的状况(以+5V为准)。
4)手动复位时,给出确定脉宽的负向复位脉冲GC707/708和GC705/706基本功能一致,区别只在于GC705/706芯片中的第8脚正脉冲的复位(RESET)输出取消了,换成了看门狗定时器,原第6脚空脚被用做看门狗电路的输入端。
GC813L则除了第7脚输出正脉冲的RESET外,其它功能和GC705/706完全一样。
这几种电路的管脚功能定义和差异详见管脚定义图和管脚说明附表。
#应用范围计算机,微处理器和微控制器系统;嵌入式控制器系统;智能仪器仪表;通信系统;工业自动化系统;电池供电手持设备等等。
# 电气参数 除非特殊说明,Vcc =4.75V~5.5V (GC705/GC707/GC813), Vcc=4.5V~5.5V (GC706/GC708),T A = T MIN to T MAX参数符号 测试条件最小值典型值 最大值 单位GC705、706、707、708 1.0 5.5电源电压范围 Vcc GC813 1.1 5.5VGC705、706、813 150 350电源电流IccGC707、70850 350uAGC705、707、8134.50 4.65 4.75 GC706、708 4.25 4.40 4.50 复位门限 V RT GC706T 3.00 3.08 3.15 V复位门限迴差40 mV复位脉冲宽度 t RS 140 200 280 ms I SOURSE =800uAVCC-1.5 I SINK = 3.2mA 0.4GC705~708,VCC=1V ,I SINK =50uA 0.3GC707\708,I SOURCE =800uAVCC-1.5GC707\708,I SINK = 1.2mA 0.4 复位输出电压GC813,I SOURCE =4uA,V CC =1.1V 0.8V看门狗计时长度 t WD GC705\706\813 1.00 1.60 2.25 秒 WDI 脉冲宽度 t WPVIL =0.4V ,VIH =(VCC)(0.8) 50 ns 下限 0.8WDI 输入阈值 上限 GC705\706\813 V CC =5V3.5 VGC705\706\813,WDI =VCC 50 150WDI 输入电流 GC705\706\813,WDI =0V -150 -50uAGC705\706\813,I SOURCE =800uA VCC-1.5WDI 输出电压 GC705\706\813,I SINK =1.2mA 0.4VMR 上拉电流MR =0V100 250 600 uA MR 脉冲宽度 t MR150 ns 下限 0.8MR 输入阈值 上限2.0VMR 到RESET 的延迟 t MD250 ns PFI 输入阈值 VCC =5V V PFI 输入电流-25 25 nAI SOURCE =800uA VCC-1.5PFO 输出电压I SINK =3.2mA0.4V#极限参数源跌落),RESET引脚就会变低。
MAX813L

-22-《国外电子元器件》1997年第6期1997年6月微处理器监控器MA X813L刘国勇摘要:MAX813L 是美国MAXIM 公司生产的微处理器专用监控器,具有看门狗、电压检测和上电复位等功能,可提高系统的可靠性和准确性。
本文介绍该芯片的内部结构、典型应用和作为单片机看门狗电路的实用电路。
关键词:监控电路看门狗电路MAX813L 复位电压检测图1MA X813L 内部框图●新特器件应用1、概述目前,监控电路在工业监控系统和微处理器中已得到广泛的应用,它可以有效的防止程序的“跑飞”,并自动将系统恢复正常工作状态。
当外来干扰导致数据总线、I/O 总线或控制总线上的数字信号错乱时,将引发一系列的后果,特别是程序指针计数器PC 值受干扰而改变时,将引起程序“跑飞”,使系统出现死机或其他一些不可预知的情况。
2、内部结构MAX813L 是美国MAXIM 公司生产的低价格单片机监控电路。
它减少了在微处理器系统中采用分离元件来实现监控功能所用的元器件数量和复杂性,并能提高系统的可靠性和准确性。
它除有看门狗作用以外,还有电源电压检测和上电(手动)复位的功能。
图1是MAX813L 的内部框图。
PEI 用于监测电源电压,如果PF I 端输入的与电源电压成正比的电压低于1.25V ,则PFO 端输出为低电平,这个负脉冲可以作为微处理器的中断脉冲。
看门狗电路监测着微处理器的状态。
如果微处理器在1.6秒之内没有触发看门狗输入端WD I 并且WD I 端不是处于三态状态,那么WDO 将变为低电平。
一旦R ESE T 信号产生或者WD I 输入为三态,看门狗定时器就会被清零且不计数。
除非R ESE T 信号消失而且WD I 端置为高电平或者低电平(即不是处于高阻状态),看门狗定时器又将开始计数。
3、MAX813L 实用实例典型的接法如图3。
将WDO接到微处理器的非屏蔽中断输入端NM I ,当电源电压V CC 低于复位的门限电平时,无论看门狗计数器计数值是否到,WDO 端都将被拉至低电平,产生非屏蔽中断,同时R ESE T信号也同时产-23-图3MA X813L 的典型应用生,因此,非屏蔽中断将会被R ESE T 信号所覆盖。
七种复位电路的介绍和复位电路几种设计详细概述

七种复位电路的介绍和复位电路几种设计详细概述
复位源是导致单片机内部复位操作的源泉,大致可分为七种:上电复位(POR)﹑人工复位(MRST)﹑电源欠电压复位(LVR)﹑看门狗复位(WDR)﹑软件复位(SWR)﹑软硬件复位(SHR)﹑和非法地址复位(IAR)。
一﹑上电复位电路
上电复位的实质是上电延时复位,也就是在上电延时期间把CPU锁定在复位状态上,就是为了弥补由于电源滤波电容存在使单片机电源由低到高逐渐上升的时间。
如下图示就是利用RC支路的充电时间而形成的常用的上电复位电路。
在每次单片机断电之后,应使延时电容C上的电荷立刻放掉,以便重新作好延时准备,为随后可能在很短时间内再次加电面作好准备。
否则,在断电后C内还没有充分放电的情况下,如果很快又加电,RC支路就失去了应有的延时功能,为次在电路中加入了一个二极管,如图C所示。
二﹑人工复位电路。
如何设计看门狗(硬件看门狗与软件看门狗)
看门狗电路的概念和作用2007/08/05 15:26一般看门狗电路用来监视MCU内部程序运行状态,在程序跑飞或死锁情况下,可以自动复位。
不过由于厂家、型号不同可能有些差别。
看门狗电路的工作原理是:当系统工作正常时,CPU将每隔一定时间输出一个脉冲给看门狗,即“喂狗”,若程序运行出现问题或硬件出现故障时而无法按时“喂狗”时,看门狗电路将迫使系统自动复位而重新运行程序。
主要作用是防止程序跑飞或死锁看门狗电路其实是一个独立的定时器,有一个定时器控制寄存器,可以设定时间(开狗),到达时间后要置位(喂狗),如果没有的话,就认为是程序跑飞,就会发出RESET指令在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"看门狗电路电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位.看门狗,又叫 watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
单片机看门狗电路的作用,看门狗系统设计技巧及其抗干扰措施
单片机看门狗电路的作用,看门狗系统设计技巧及其抗干扰措施在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称看门狗(watchdog)其作用是使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
单片机看门狗电路的作用看门狗的作用:看门狗定时器是一个计数器,基本功能是在发生软件问题和程序跑飞后使系统重新启动。
看门狗计数器正常工作时自动计数,程序流程定期将其复位清零,如果系统在某处卡死或跑飞,该定时器将溢出,并将进入中断。
在定时器中断中执行一些复位操作,使系统恢复正常的工作状态,即在程序没有正常运行期间,如期复位看门狗以保证所选择的定时溢出归零,使处理器重新启动。
软件的可靠性一直是一个关键问题。
任何使用软件的人都可能会经历计算机死机或程序跑飞的问题,这种情况在嵌入式系统中也同样存在。
由于单片机的抗干扰能力有限,在工业现场的仪器仪表中,常会由于电压不稳、电弧干扰等造成死机。
在水表、电表等无人看守的情况下,也会因系统遭受干扰而无法重启。
为了保证系统在干扰后能自动恢复正常,看门狗定时器(Watchdog TImer)的利用是很有价值的。
MAX813L
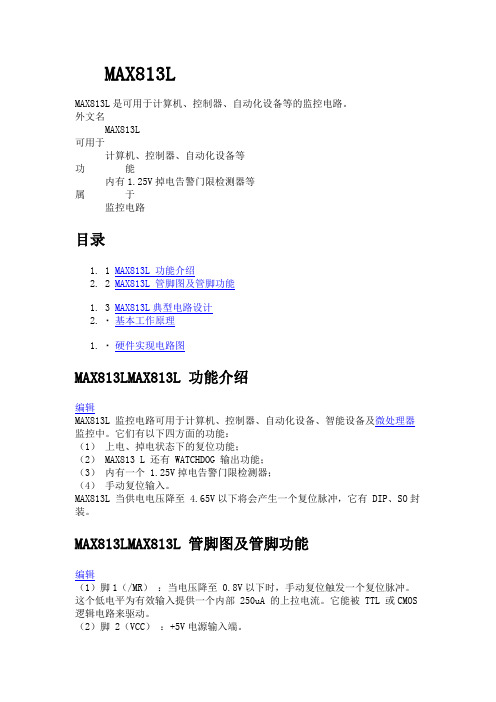
MAX813LMAX813L是可用于计算机、控制器、自动化设备等的监控电路。
外文名MAX813L可用于计算机、控制器、自动化设备等功能内有1.25V掉电告警门限检测器等属于监控电路目录1. 1 MAX813L 功能介绍2. 2 MAX813L 管脚图及管脚功能1. 3 MAX813L典型电路设计2.▪基本工作原理1.▪硬件实现电路图MAX813LMAX813L 功能介绍编辑MAX813L 监控电路可用于计算机、控制器、自动化设备、智能设备及微处理器监控中。
它们有以下四方面的功能:(1)上电、掉电状态下的复位功能;(2) MAX813 L 还有 WATCHDOG 输出功能;(3)内有一个 1.25V掉电告警门限检测器;(4)手动复位输入。
MAX813L 当供电电压降至 4.65V以下将会产生一个复位脉冲,它有 DIP、SO封装。
MAX813LMAX813L 管脚图及管脚功能编辑(1)脚1(/MR):当电压降至 0.8V以下时,手动复位触发一个复位脉冲。
这个低电平为有效输入提供一个内部 250uA 的上拉电流。
它能被 TTL 或CMOS 逻辑电路来驱动。
(2)脚 2(VCC):+5V电源输入端。
(3)脚 3(GND):对所有信号 0V参考地。
(4)脚4(PFI):电源失效监督输入端。
当 PFI 低于 1.25V,/PFO 为低电平。
若 PFI不用,可将其与 GND或 VCC 相连。
(5)脚 5(/PFO):当 PFI 低于 1.25V时,电源失效输出为低电平,且吸收电流。
(6)脚 6(WDI):看门狗输入端。
当 WDI 维持高电平或低电平达 1.6S 时,其内部WATCHDOG 定时器完成计数,且 WDO 为低电平。
WDI 悬空或将 WDI 接到一个三态高阻缓冲器可使 WACHTDOG 失去作用。
一旦证实复位发生,WDI 处于三态状态,或在 WDI 端检测到一个上升沿或下降沿,内部 WATCHDOG 定时器则被清零。
单片机看门狗电路的作用,看门狗系统设计技巧及其抗干扰措施
单片机看门狗电路的作用,看门狗系统设计技巧及其抗干扰措施在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称看门狗(watchdog)其作用是使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
单片机看门狗电路的作用看门狗的作用:看门狗定时器是一个计数器,基本功能是在发生软件问题和程序跑飞后使系统重新启动。
看门狗计数器正常工作时自动计数,程序流程定期将其复位清零,如果系统在某处卡死或跑飞,该定时器将溢出,并将进入中断。
在定时器中断中执行一些复位操作,使系统恢复正常的工作状态,即在程序没有正常运行期间,如期复位看门狗以保证所选择的定时溢出归零,使处理器重新启动。
软件的可靠性一直是一个关键问题。
任何使用软件的人都可能会经历计算机死机或程序跑飞的问题,这种情况在嵌入式系统中也同样存在。
由于单片机的抗干扰能力有限,在工业现场的仪器仪表中,常会由于电压不稳、电弧干扰等造成死机。
在水表、电表等无人看守的情况下,也会因系统遭受干扰而无法重启。
为了保证系统在干扰后能自动恢复正常,看门狗定时器(Watchdog TImer)的利用是很有价值的。
MAX705

功能监控器MAX705/706/813中文资料。
功能监控器MAX705/706/813中文资料。
概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
功能说明RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V 的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
如果在已经开始的复位脉冲期间出现电源跌落,复位脉冲至少再维持140ms。
在掉电期间,一旦电源电压Vcc降到复位门限以下,只要Vcc不比1.0V还低,就能使RESET维持电压不高于0.4V的低电平。
MAX705和MAX706提供的复位信号为低电平RESET,而MAX813L提供的复位信号为高电平RESET,三者其它功能完全相同。
有些单片机,如INTEL的80C51系列,需要高电平有效的复位信号。
看门狗定时器MAX705/706/813L片内看门狗定时器用于监控MPU/MCU的活动。
MAX813及看门狗电路
MAX813看门狗电路是常用的一种抗干扰措施,用以保证系统因干扰失控后能自动复位。
Max813看门狗电路实质上是一个可由CPU复位的定时器,它的定时时间是固定不变的,一时定时时间到,电路就产生复位信号或中断信号。
当程序正常运行时,在小于定时时间隔内,单片机输出一信号刷新定时器,定时器处于不断的重新定时过程,因此看门狗电路就不会产生复位信号或中断信号,反之,当程序因出现干扰而“跑飞”时,单片机不能刷新定时器,产生复位信号或产生中断信号使单片机复位或中断,在中断程序中使其返回到起始程序,恢复正常。
应用:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其它控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段不进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
看门狗技术可由硬件实现,也可由软件实现。
在系统成本允许的情况下,就选择专门的看门狗芯片或片内带看门狗的单片机。
若条件不允许,应加软件看门狗。
软件看门狗就是利用程序,在运行时间上对条件不满足而无法退出的一个模块、一个非正常结束的任务进行约束。
看门狗电路可以分为内看门狗和外看门狗两在类。
内看门狗电路是指看门狗的硬件电路包含在单片机内部。
对于没有内看门狗定时器的单片机或认为内看门狗不可靠时,可以采用外部看门狗定时器。
外部看门狗电路既可以用专用看门狗芯片,也可用普通芯片搭成。
专用硬件看门狗电路实际上是一个特殊的定时器,当定时时间到,发出溢出脉冲。
硬件电路连接好后,在程序中适当地插入一些看门狗复位的指令(即“喂狗“指令),保证单片机的RESET引脚使单片机复位。
主要功能:1.上电、掉电以及降压情况下具有RESET输出。
MAX813(En)

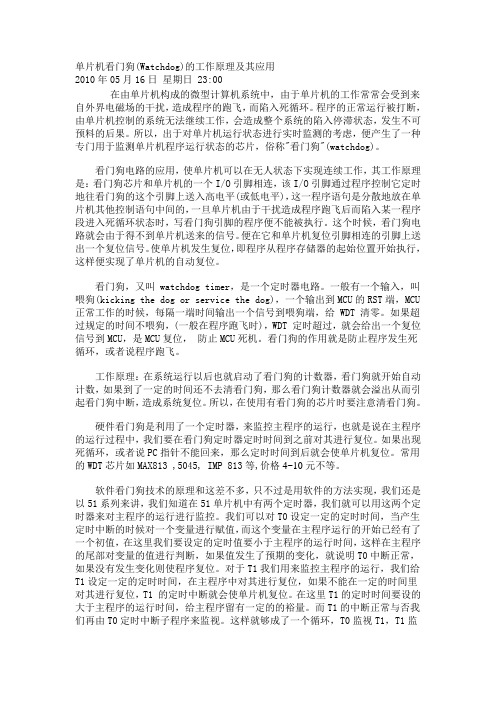
MAX705–MAX708/MAX813LLow-Cost, µP Supervisory Circuits________________________________________________________________Maxim Integrated Products 1_________________Pin Configurations__________Typical Operating CircuitCall toll free 1-800-998-8800 for free samples or literature.19-4334; Rev. 5; 9/95_______________General DescriptionThe MAX705-MAX708/MAX813L microprocessor (µP)supervisory circuits reduce the complexity and number of components required to monitor power-supply and battery functions in µP systems. These devices signifi-cantly improve system reliability and accuracy com-pared to separate ICs or discrete components.The MAX705/MAX706/MAX813L provide four functions:1)A reset output during power-up, power-down, and brownout conditions.2)An independent watchdog output that goes low if the watchdog input has not been toggled within 1.6seconds.3)A 1.25V threshold detector for power-fail warning,low-battery detection, or for monitoring a power sup-ply other than +5V.4)An active-low manual-reset input.The MAX707/MAX708 are the same as the MAX705/MAX706, except an active-high reset is substituted for the watchdog timer. The MAX813L is the same as the MAX705, except RESET is provided instead of RESET.Two supply-voltage monitor levels are available: The MAX705/MAX707/MAX813L generate a reset pulse when the supply voltage drops below 4.65V, while the MAX706/MAX708 generate a reset pulse below 4.40V.All four parts are available in 8-pin DIP, SO and µMAX packages._______________________ApplicationsComputers ControllersIntelligent Instruments Automotive SystemsCritical µP Power Monitoring___________________________Featureso µMAX Package: Smallest 8-Pin SO o Guaranteed RESET Valid at V CC = 1V o Precision Supply-Voltage Monitor4.65V in MAX705/MAX707/MAX813L 4.40V in MAX706/MAX708o 200ms Reset Pulse Widtho Debounced TTL/CMOS-Compatible Manual-Reset Inputo Independent Watchdog Timer—1.6sec Timeout (MAX705/MAX706)o Active-High Reset Output (MAX707/MAX708/MAX813L)o Voltage Monitor for Power-Fail or Low-Battery Warning______________Ordering InformationOrdering Information continued at end of data sheet.*Dice are specified at T A = +25°C.**Contact factory for availability and processing to MIL-STD-883.M A X 705–M A X 708/M A X 813LLow-Cost, µP Supervisory CircuitsTerminal Voltage (with respect to GND)V CC ..............................................-0.3V to 6.0V All Other Inputs (Note 1)...............-0.3V to (V CC + 0.3V)Input CurrentV CC ......................................................20mA GND ....................................................20mA Output Current (all outputs).............................20mA Continuous Power DissipationPlastic DIP (derate 9.09mW/°C above +70°C).......727mWSO (derate 5.88mW/°C above +70°C)...............471mW µMAX (derate 4.10mW/°C above +70°C)............330mW CERDIP (derate 8.00mW/°C above +70°C)..........640mW Operating Temperature RangesMAX70_C__, MAX813LC__....................0°C to +70°C MAX70_E__, MAX813LE__...................-40°C to +85°C MAX70_MJA ................................-55°C to +125°C Storage Temperature Range ................-65°C to +160°C Lead Temperature (soldering, 10sec)................+300°CELECTRICAL CHARACTERISTICS(V CC = 4.75V to 5.5V for MAX705/MAX707/MAX813L, V CC = 4.5V to 5.5V for MAX706/MAX708, T A = T MIN to T MAX , unless otherwise noted.)Stresses beyond those listed under "Absolute Maximum Ratings " may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.ABSOLUTE MAXIMUM RATINGSNote 1:The input voltage limits on PFI and MR can be exceeded if the input current is less than 10mA.MAX705–MAX708/MAX813LLow-Cost, µP Supervisory Circuits_______________________________________________________________________________________3ELECTRICAL CHARACTERISTICS (continued)(V CC = 4.75V to 5.5V for MAX705/MAX707/MAX813L, V CC = 4.5V to 5.5V for MAX706/MAX708, T A = T MIN to T MAX , unless otherwise noted.)Note 2:Applies to both RESET in the MAX705-MAX708 and RESET in the MAX707/MAX708/MAX813L.M A X 705–M A X 708/M A X 813LLow-Cost, µP Supervisory Circuits 4_________________________________________________________________________________________________________________________________Typical Operating CharacteristicsMAX707/MAX708/MAX813L RESET OUTPUT VOLTAGE vs. SUPPLY VOLTAGE500ms/divV CC0VRESET0V+5V1V/div+5V1V/divMAX813LRESET RESPONSE TIME2µs/div+5V V CC0V0V+4V+4VMAX705/MAX707 RESET OUTPUT VOLTAGE vs. SUPPLY VOLTAGE500ms/divV CC0VRESET0V+5V1V/div+5V1V/divMAX705/MAX707 RESET RESPONSE TIME 2µs/divV CC+5V RESET+5V+4V1V/div 0VPOWER-FAIL COMPARATOR DE-ASSERTION RESPONSE TIME400ns/divPFI +1.20VPFO0V+3V+1.30VPOWER-FAIL COMPARATOR ASSERTION RESPONSE TIME400ns/divPFI+1.30V PFO+5V0V+1.20V1V/div50mV/divMAX707RESET, RESET ASSERTION400ns/div0V+5VRESET1V/div+5V0VMAX707400ns/div0V +5VRESET RESET2V/div+5V0VMAX705–MAX708/MAX813LLow-Cost, µP Supervisory Circuits_______________________________________________________________________________________5______________________________________________________________Pin DescriptionM A X 705–M A X 708/M A X 813L_______________Detailed DescriptionReset OutputA microprocessor’s (µP’s) reset input starts the µP in a known state. Whenever the µP is in an unknown state, it should be held in reset. The MAX705-MAX708/MAX813L assert reset during power-up and prevent code execu-tion errors during power-down or brownout conditions.On power-up, once V CC reaches 1V, RESET is a guaran-teed logic low of 0.4V or less. As V CC rises, RESET stays low. When V CC rises above the reset threshold, an inter-nal timer releases RESET after about 200ms. RESET puls-es low whenever V CC dips below the reset threshold, i.e.brownout condition. If brownout occurs in the middle of a previously initiated reset pulse, the pulse continues for at least another 140ms. On power-down, once V CC falls below the reset threshold, RESET stays low and is guar-anteed to be 0.4V or less until V CC drops below 1V.The MAX707/MAX708/MAX813L active-high RESET output is simply the complement of the RESET output, and is guaranteed to be valid with V CC down to 1.1V. Some µPs,such as Intel’s 80C51, require an active-high reset pulse.Watchdog TimerThe MAX705/MAX706/MAX813L watchdog circuit moni-tors the µP’s activity. If the µP does not toggle the watch-dog input (WDI) within 1.6sec and WDI is not three-stat-is asserted or theWDI input is three-stated, the watchdog timer will stay cleared and will not count. As soon as reset is released and WDI is driven high or low, the timer will start counting.Pulses as short as 50ns can be detected.Typically, WDO will be connected to the non-maskable interrupt input (NMI) of a µP. When V CC drops below will go low whether or not the watchdog timer has timed out yet. Normally this would trigger an NMI interrupt, but RESET goes low simultane-ously, and thus overrides the NMI interrupt.If WDI is left unconnected, WDO can be used as a low-line output. Since floating WDI disables the internal timer, WDO goes low only when V CC falls below the reset threshold, thus functioning as a low-line output.The MAX705/MAX706 have a watchdog timer and a RESET output. The MAX707/MAX708 have both active-high and active-low reset outputs. The MAX813L has both an active-high reset output and a watchdog timer.Manual ResetThe manual-reset input (MR) allows reset to be trig-gered by a pushbutton switch. The switch is effectively debounced by the 140ms minimum reset pulse width.MR is TTL/CMOS logic compatible, so it can be driven can be used to force a watchdog timeout to generate a reset pulse in the MAX705/MAX706/MAX813L. Simply connect WDO to MR.Low-Cost, µP Supervisory Circuits 6_______________________________________________________________________________________Figure 1. MAX705/MAX706/MAX813L Block Diagram Figure 2. MAX707/MAX708 Block DiagramPower-Fail ComparatorThe power-fail comparator can be used for various pur-poses because its output and noninverting input are not internally connected. The inverting input is internal-ly connected to a 1.25V reference.To build an early-warning circuit for power failure, con-nect the PFI pin to a voltage divider (see Typical Operating Circuit ). Choose the voltage divider ratio so that the voltage at PFI falls below 1.25V just before the to interrupt the µP so it can prepare for an orderly power-down.__________Applications InformationEnsuring a Valid RESET Output Down to V CC = 0VWhen V CC falls below 1V, the MAX705-MAX708 RESET output no longer sinks current—it becomes an open cir-cuit. High-impedance CMOS logic inputs can drift to undetermined voltages if left undriven. If a pull-down resistor is added to the RESET pin as shown in Figure 5,any stray charge or leakage currents will be drained to ground, holding RESET low. Resistor value (R1) is not critical. It should be about 100k Ω, large enough not to load RESET and small enough to pull RESET to ground.Monitoring Voltages Other Than theUnregulated DC InputMonitor voltages other than the unregulated DC by connecting a voltage divider to PFI and adjusting the ratio appropriately. If required, add hysteresis by con-necting a resistor (with a value approximately 10 times the sum of the two resistors in the potential divider net-work) between PFI and PFO. A capacitor between PFI and GND will reduce the power-fail circuit’s sensitivity to high-frequency noise on the line being monitored.can be asserted on other voltages in addition to the +5V V CC line. Connect PFO to MR to initiate a RESET pulse when PFI drops below 1.25V. Figure 6 shows the MAX705-MAX708 configured to assert RESET when the +5V supply falls below the reset threshold, or when the +12V supply falls below approximately 11V.Monitoring a Negative VoltageThe power-fail comparator can also monitor a negative supply rail (Figure 7). When the negative rail is good (a negative voltage of large magnitude), PFO is low, and when the negative rail is degraded (a negative voltage is high. By adding the resis-tors and transistor as shown, a high PFO triggers reset.As long as PFO remains high, the MAX705-MAX708/MAX813L will keep reset asserted (RESET =low, RESET = high). Note that this circuit’s accuracy depends on the PFI threshold tolerance, the V CC line,and the resistors.MAX705–MAX708/MAX813LLow-Cost, µP Supervisory Circuits_______________________________________________________________________________________7Figure 3. MAX705/MAX706/MAX813L Watchdog TImingM A X 705–M A X 708/M A X 813LInterfacing to µPs with Bidirectional Reset PinsµPs with bidirectional reset pins, such as the Motorola 68HC11 series, can contend with the MAX705-MAX708RESET output. If, for example, the RESET output is driven high and the µP wants to pull it low, indeterminate logic levels may result. To correct this, connect a 4.7k Ωresistor between the RESET output and the µP reset I/O,as in Figure 8. Buffer the RESET output to other system components.Low-Cost, µP Supervisory Circuits 8_______________________________________________________________________________________Figure 7. Monitoring a Negative VoltageFigure 8. Interfacing to µPs with Bidirectional Reset I/OFigure 5. RESET Valid to Ground Circuit Figure 6. Monitoring Both +5V and +12VMAX705–MAX708/MAX813LLow-Cost, µP Supervisory Circuits_______________________________________________________________________________________9__Ordering Information (continued)*Dice are specified at T A = +25°C.**Contact factory for availability and processing to MIL-STD-883.8CERDIP**-55°C to +125°CMAX813LMJA8Plastic DIP 0°C to +70°C MAX708CPA 8SO 0°C to +70°C MAX708CSA Dice*0°C to +70°C MAX708C/D 8Plastic DIP -40°C to +85°C MAX708EPA 8SO -40°C to +85°C MAX708ESA 8CERDIP**-55°C to +125°C MAX708MJA 8Plastic DIP 0°C to +70°C MAX813L CPA 8SO 0°C to +70°C MAX813LCSA Dice*0°C to +70°C MAX813LC/D 8Plastic DIP -40°C to +85°C MAX813LEPA 8SO -40°C to +85°C MAX813LESA 8CERDIP**-55°C to +125°C MAX707MJA 8SO-40°C to +85°C MAX707ESA 8Plastic DIP -40°C to +85°C MAX707EPA Dice*0°C to +70°C MAX707C/D 8SO 0°C to +70°C MAX707CSA 8Plastic DIP 0°C to +70°C MAX707CPA 8CERDIP**-55°C to +125°C MAX706MJA 8SO -40°C to +85°C MAX706ESA 8Plastic DIP -40°C to +85°C MAX706EPA 8CERDIP**-55°C to +125°C MAX705MJA 8SO -40°C to +85°C MAX705ESA 8Plastic DIP -40°C to +85°C MAX705EPA PIN-PACKAGE TEMP. RANGE PART Dice*0°C to +70°C MAX706C/D 8SO 0°C to +70°C MAX706CSA 8Plastic DIP 0°C to +70°C MAX706CPA 8µMAX 0°C to +70°C MAX706CUA 8µMAX 0°C to +70°C MAX707CUA 8µMAX 0°C to +70°C MAX708CUA 8µMAX 0°C to +70°C MAX813LCUA _______Pin Configuration (continued)____________________Chip T opography( ) ARE FOR MAX813L ONLY.TRANSISTOR COUNT: 572SUBSTRATE MUST BE LEFT UNCONNECTED.RESET (RESET) GNDWDO/RESETPFI0.051" (1.30mm)0.074" (1.88mm)WDI/N.C.PFOV CC MRM A X 705–M A X 708/M A X 813LLow-Cost, µP Supervisory Circuits 10_____________________________________________________________________________________________________________________________________________Package InformationMAX705–MAX708/MAX813LLow-Cost, µP Supervisory Circuits______________________________________________________________________________________11MA X 12324.37/4.62250 0.15/0.6/1.2 0.2(0.05)81.71M A X 690A /692A 4.65/4.40140 1.6 10400 0.35(0.2)5(0.05)83.26M A X 690R /S /T 2.63/2.93/3.08140 1.6 6400 0.5(0.4)1(0.4)83.23M A X 691A /693A 4.65/4.40140/a d j . 1.6/ad j . 1.225 /10n s 0.1(0.035)5(0.04)163.61M A X 1691T he M A X 1691 i sa m o d u l e w it h t h eM A X691Aa nda125m A h li t h i u m ba t t e r y 16††M A X 696A d j .35/a d j . 1.6/a d j . 163.55M A X 697A d j .35/adj . 1.6/a d j . 163.58M A X 7004.65/a d j .200 0.2(0.1)82.17M A X 703/7044.65/4.40140 10400 0.35(0.2)5(0.05)81.38*M A X 704R /S /T 2.63/2.93/3.08140 6400 0.5(0.4)1(0.4)82.93M A X 705/7064.65/4.40140 1.6 0.35(0.2)81.02*M A X 706P 2.63140 1.6 0.35(0.2)81.71M A X 706R /S /T 2.63/2.93/3.08140 1.6 0.35(0.2)81.71M A X 707/7084.65/4.40140 0.35(0.2)80.88*M A X 708R /S /T 2.63/2.93/3.08140 0.35(0.2)81.63M A X 7914.65140 1 1.225 /10n s 0.15(0.06)5(0.04)163.90M A X 792L /M/R/S /T 4.65/4.40/140 1 /10n s 0.15(0.07)163.422.63/2.93/3.08M A X 793R /S /U /T 2.63/2.93/3.07/3.08140 1.6 T B D T B D T B D T B D 16††M A X 794A d j .140 1.6 T B D T B D T B D T B D 16††M A X 795R /S /U /T 2.63/2.93/3.07/3.08140 T B D T B D T B D T B D 8††M A X 800L /M 4.60/4.40140 1.6/a dj . 1.225 /10n s /±2% 0.1(0.035)5(0.04)163.88M A X 801L /N /M 4.68/4.58/4.43140 /±1.5% 1.6 T B D T B DT B D T B D 8††M A X 802L /M /R /S /T 4.60/4.40/140 1.6 10400 /±2%0.35(0.2)5(0.05)83.592.63/2.93/3.08M A X 804R /S /T 2.63/2.93/3.08140 1.6 6400 /±2%0.5(0.4)1(0.4)83.66M A X 805L /M /R /S /T 4.65/4.40/140 1.6 10400 0.35(0.2)5(0.05)83.262.63/2.93/3.08M A X 806R /S /T 2.63/2.93/3.08140 6400 /±2% 0.5(0.4)1(0.4)83.90M A X 807L /N /M 4.68/4.58/4.43140 /±1.5% /±1.5% 1.6 T B D T B D T B D T B D 8††M A X 808L /N /M 4.68/4.58/4.43140 /±1.5% T B D T BDT B D T B D 16††M A X 809L /M /R /S /T 4.65/4.40/140 0.06(0.024)3††2.63/2.93/3.08M A X 810L /M /R /S /T 4.65/4.40/140 0.06(0.024)3††2.63/2.93/3.08M A X 813L 4.65140 1.6 /±2% 0.35(0.2)81.02*M A X 814K /L /N /T 4.80/4.70/4.55/3.03140 /±1% /±1% /±2% T B D T B D 8††M A X 815K /L /N /T 4.80/4.70/4.55/3.03140 /±1%1.6 /±2% T B D T B D 8††M A X 816A d j ./±1%140 /±2% T B D T B D 8††M A X 820L /M /R /S /T 4.65/4.40/140 1 /10n s /±2% 0.15(0.07)163.822.63/2.93/3.08M X D 12104.37/4.62 2.5667 0.5(.23).1(0.002)82.44___________________________________________µP S u pe r v i s o r y C i rc u i t s P r i c e †1000-u p ($)P a r t N u m b e r N o m i n a l R e s e t T h r e s h o ld (V )M i n i m u m Re s e t P u l s e W i d t h (m s )A c t i v e -L o w R e s e t A c t i v e -H i g h R e s e t N o m i n a l W a t c h d o g T i m e o u t P e r i o d (s e c ), if A v a i l a b l e S e p a r a t e W a t c h d og O u t p u t B a c k u p -B a t t e r y S w i t ch V C C -t o -V O U T On R e s i s t a n c e M a x (Ω)–C —E –W r i t e P r o t e c t V B A T T -t o -V O U T O n R e s i s t a n c e M a x (Ω)M a n u a l -R e s e t In p u t L o w -L i n e O u t p u t B a t t e r y -O n Ou t p u t P o w e r -F a i l C o m p a r a t o r I S U P P L Y O p e r a t i n g M o d e m A m a x (t y p )I S U P P L Y B a c k u p M o d e µA m a x (t y p ) P i n s –R —E —S —E —T –V a l i d to V C C = 1V †P r i c e s p r o v i d e dar ef o r d e s ig n g u id a n c ea n d a re F O B U S A (u n l e s s o t h e rw i s e n o t e d ).I n t e rn atio nalpriceswilld ifferdu et olocald uties,taxes,a ndexch angerates.††F u t u re p r o d u c t—c o n t a c t fa c t o ryf orp ricin ga nda v a ila b ility.Spe cifica tio nsa r epreli m inary.*25,pc.pr ice ,f actorydirectMaxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.12__________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 (408) 737-7600©1995 Maxim Integrated Products Printed USA is a registered trademark of Maxim Integrated Products.M A X 705–M A X 708/M A X 813LLow-Cost, µP Supervisory Circuits。
一种看门狗芯片电参数测试电路设计
一种看门狗芯片电参数测试电路设计曹玉翠;王香芬;高成【摘要】看门狗芯片是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器或微控制器的工作状态.由于芯片通用的功能和低廉的价格,在工程中应用越来越广泛.看门狗芯片种类较多,质量参差不齐,如何将合格的芯片投入生产,检测就成了至关重要的环节.以MAX705/706/813L为研究对象,根据MAX706芯片的工作特性,通过研究看门狗电路的工作原理,设计了一种简单的测试电路,能够有效地测试出合格的看门狗芯片.采用该测试电路进行测试,与自动测试系统测试数据对比,误差在15%之内,证明了测试电路的有效性.【期刊名称】《电子与封装》【年(卷),期】2018(000)0z1【总页数】6页(P13-17,49)【关键词】看门狗电路;参数测试;MAX706;CMOS型【作者】曹玉翠;王香芬;高成【作者单位】北京航空航天大学可靠性系统工程研究所,北京 100094;北京航空航天大学可靠性系统工程研究所,北京 100094;北京航空航天大学可靠性系统工程研究所,北京 100094【正文语种】中文【中图分类】TN4021 引言看门狗是智能化电路模块的重要组成部分之一,工程上很多监控电路采用专门的看门狗芯片如MAX705/706实现,完成诸如上电复位、手动复位及掉电复位等功能。
由于看门狗的重要作用,看门狗的应用越来越广泛。
对于保障系统的可靠运行具有十分重要的意义。
市场上看门狗芯片的种类很多,质量也参差不齐,如何将合格的芯片投入生产,检测就成了最重要的一步。
看门狗电路的电性能检测多采用集成电路自动测试系统进行,通过编写机台的程序,判断各个参数是否在合格范围。
目前市场上自动测试系统的价格在几十万左右,如果仅用于检测该芯片,则大大增加了合格芯片的使用成本。
为此,本文以MAX706为研究对象,设计了一种有效、成本低的专用于看门狗芯片的电参数测试电路,能够筛选出合格产品用于生产。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
看门狗电路设计在工业现场运行的单片机应用系统,由于坏境恶劣,常有强磁场、电源尖峰、电火花等外界干扰,这些干扰可能造成仪表中单片机的程序运行出现“跑飞”现象,引起程序混乱,输出或显示不正确,甚至“死机”。
系统无法继续正常的运行,处在一种瘫痪状态,它的硬件电路并没有损坏,只是内部程序运行出现了错误,这时,即使干扰消失,系统也不会恢复正常,这就需要采取一些措施来保障系统失控后能自动恢复正常,“程序运行几天来视系统”(Watchdog看门狗)就是常用的一种抗干扰措施,用以保证系统因干扰失控后能自动复位。
为了提高仪表可靠性及抗干扰能力,通常在智能仪表中采用“看门狗”技术。
看门狗电路它实质上是一个可由CPU复位的定时器,它的定时时间是固定不变的,一旦定时时间到,电路就产生复位信号或中断信号。
当程序正常运行时,在小于定时时间隔内,单片机输出一信号刷新定时器,定时器处于不断的重新定时过程,因此看门狗电路就不会产生复位信号或中断信号,反之,当程序因出现干扰而“跑飞”时,单片机不能刷新定时器,产生复位信号或产生中断信号使单片机复位或中断,在中断程序中使其返回到起始程序,恢复正常。
它的工作原理如同图3-4所示的两个计时周期不同的定时器T1和T2是两个时钟源相同的定时器,设T1=1.0s,T2=1.1s,而用T1定时器的溢出脉冲P1同时对T1和T2定时器清零,只要T1定时器工作正常,则定时器T2永远不可能计时溢出。
当T1定时器不在计时,定时器T2则会计时溢出,并产生溢出脉冲P2。
一旦产生溢出脉冲P2,则表明T1出了故障。
这里的T2即是看门狗。
利用溢出脉冲P2并进行巧妙的程序设计,可以检测系统的出错,而后使“飞掉”的程序重新恢复运行。
图3-4 看门狗工作原理示意图看门狗电路的应用,使单片机可以在无人关态下实现连续工作。
看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其它控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段不进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
“看门狗”技术既可由硬件实现,也可由软件实现。
在系统成本允许的情况下,就选择专门的看门狗芯片或片内带看门狗的单片机。
若条件不允许,应加软件“看门狗”。
所谓软件“看门狗”,就是对程序中可能出现这种条件不满足而无法退出的一个模块、一个非正常结束的任务等,在运行时间上进行约束,将理论计算得到的最大时间跨度,作为这个模块或任务的最大执行时间,如果超过了这个时间跨度,则强制退出(结束)本模块、本次任务,把MCU的时间交给下一个模块或恢复有关资源的初始状态,供下一次任务使用。
“看门狗”电路可以分为内“看门狗”和外“看门狗”电路两大类。
内“看门狗”电路是指“看门狗”的硬件电路包含在单片要内部。
对于没有内“看门狗”定时器的单片机或认为内“看门狗”不可靠时,可以采用外部“看门狗”定时器。
外部“看门狗”电路既可以用专用“看门狗”芯片,也可用普通芯片搭成。
专用硬件看门狗是指一些集成化的或集成在单片机内的专用看门狗电路,它实际上是一个特殊的定时器,当定时时间到时,发出溢出脉冲。
从实现角度上看,该方式是一种软件与片外专用电路相结合的技术,硬件电路连接好以后,在程序中适当地插入一些看门狗复位的指令(即“喂狗”指令),保证单片机的RESET 引脚使单片机复位。
在这种方式中,看门狗能否可靠有效地工作,与硬件组成及软件的控制策略都有密切的关系。
目前常用的集成看门狗电路很多,如MAX705~708、MAX791、MAX813L、X5043/5045等。
/////////////////////////////////////// 本系统采用MAX813L看门狗电路监控单片机的工作,如果单片机工作不正常,看门狗电路在规定时是内得不到刷新复位,就输出信号强制单片机复位重新启动工作,保证仪器正常工作。
////////////////////////////////////////////////1.MAX813L芯片功能原理MAX813L主要有以下几个功能:(1)上电、掉电以及降压情况下具有RESET输出。
(2)独立的“看门狗”电路。
“看门狗”定时时间为 1.6s。
/////////////////////////(3)1.25V门限检测器,用于低压报警,适时监视+5V以外的电源电压。
(4)具有手工复位输入端。
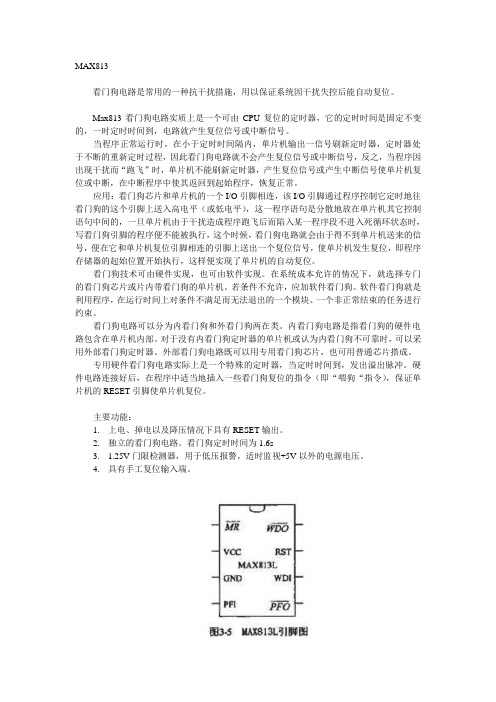
MAX813L是MAXIM公司推出的低成本微处理器监控芯片,封装形式为8脚双列直插式(DIP)和小型(SO)式封装,引脚图如图3-5所示。
MAX813L引脚说明如下:○1脚():手动复位输入端(),当该端输入低电平保持140ms以上,MAX813L就输出复位信号。
该输入端的最小输入脉宽要求可以有效地消除开关的抖动。
与TTL/CMOS兼容。
○2脚(VCC):5V电源。
////////////////////////////////////////////////////○3脚(GND):电源地。
////////////////////////////////////////////////////// ○4脚(PFI):电源检测输入端。
可将需要检测的电源连接于此,不用时接地或电源。
○5脚():电源检测输出端。
被检测电源正常时,输出高电平,否则输出低电平。
○6脚(WDI):“看门狗”输入端,俗称“喂狗”信号。
程序正常运行时,必须在小于1.6s的时间间隔内向该输入端发送一个脉冲信号,以清除芯片内部的看门狗定时器。
若超过1.6s该输入端收到脉冲信号,则内部定时器溢出,8号引脚由高电平变为低电平。
○7脚(RESET):上电时自动产生200ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
○8脚():“看门狗”输出端“喂狗”信号在1.6s内不能及时送入时,该脚即产生1个低电平信号。
////////////////////////////////////////////////////////2.硬件实现电路图////////////////////////////////////////////////图3-6给出了MAX813L在系统中的线路图。
此电路可以实现上电、瞬时掉电以及程序运行出现“死机”时的自动复位和随时的手动复位;并且可以实时地监视电源故障,以便及时地保存数据。
本电路巧秒地利用了MAX813L的手动复位输入端。
只要程序一旦跑飞引起程序“死机”,端电平由高到低,当变低超过140ms,将引起MAX813L 产生一个200ms的复位脉冲。
同时使看门狗定时器清0和使脚变成高电平。
也可以随时使用手动复位按扭使MAX813L产生复位脉冲,由于为产生复位脉冲端要求低电平至少保持140ms以上,故可以有效地消除开关抖动。
该电路可以适时地监控电源故障(掉电、电压降低等)。
图3-6中RI的一端接未经稳压的直流电源。
电源正常时,确保R2上的电压高于 1.26V,即保证MAX813L的PFI输入端电平高于1.26V。
当电源发生故障,PFI输入端的电平低于1.25V时,电源故障输出端电平由高变低,引起单片机中断,CPU响应中断,执行相应的中断服务程序,保护数据,断开外部用电电路等。
3.软件设计(1)程序运行“死机”及相应对策///////////////////////////////////////////////////程序正常运行时,由主程序在小于1.6s的时间间隔内周期性地从P1.7端向MAX813L的P1.7输入端发送一个脉冲信号,以消除芯片内部的看门狗定时器。
实现指令为:若超过1.6s该输入端收不到脉冲信号,则内部看门狗定时器溢出,8号引脚由高电平变为低电平。
引起MAX813L产生一个200ms的复位脉冲。
同时使看门狗定时器清零和使8号引脚变成高电平。
需要引起注意的是,整个单片机系统完成复位后,在PC指针的指针下整个程序将从0000H地址处重新开始初始化运行,而这在很多情况下是不允许的(如连续的工艺流程),为此必须采取相应的措施。
首先在对单片机系统完成复位后,程序应该先判断是开机运行(冷启动)还是运行过程中“死机”之后的重新加载运行(热启动)。
因此一般情况下在这两种启动方式下,系统程序在进入主流程在进入主流程前所要做的工作往往不同。
如冷启动后,系统程序在初始化程序往往要进行系统资源的自检以及将各外围设备修改设置,只是对单片机系统本身的一些资源进行必要的设置工作。
其次,在大多数情况下,我们总可以把一个连续的过程分解开来,把它变成一个个独立的子过程(状态)组成的连续过程。
在主程序运行过程中,适时保存相应状态和该状态下的相关参数。
这样当程序运行出现“死机”,在MAX813L作用下系统复位和初始化后,将首先查询事先保存的状态参数,然后根据此参数决定程序的流向。
同时把该状态下事先保存的参数取出,对系统外围设备进行必要的恢复设置工作和引导程序继续运行。
根据这一思想设计的系统程序流程图如图3-7所示。
图3-7 看门狗软件流程图(2)电源故障及相应对策当电源发生故障时,引起单片机中断,CPU响应中断,执行相应的中断服务程序,保护数据,断开外部用电电路等。
为了做到这一点必须把中断优先级(PX0)设为最高,特别是系统中还有其它中断时,更应该如此。
中断优先级的设置可通过中断优先寄存器实现,此外还要设置中断允许寄存器的总允许位(EA)及外部中断0中断允许位(EX0)。
实现指令为:SETB IP.0:设置PX0=1SETB IE.7:设置EA=1SETB IE.0:设置EX0=1。