基于Simulink的精梳机主传动机构建模与仿真
基于MATLABSimulink机电系统动态仿真教程第一章
二、仿真的分类
按模型分类
1、物理仿真:采用物理模型,有实物介入! 具有效果逼真,精度高等优点,但造价高或耗时长, 大多在一些特殊场合下采用(如导弹、卫星一类飞 行器的动态仿真,发电站综合调度仿真与培训系统 等),具有实时性、在线的特点。 2、数学仿真:采用数学模型 在计算机上进行,具有非实时性、离线的特点,经 济、快速、实用。
《机电系统动态仿真——基于 MATLAB/Simulink》
刘白雁教授编著 机械工业出版社
2006,8
仿真软件的简介 一、仿真的发展
1、程序编程阶段: 所有问题(如:微分方程求解、 矩阵运算、绘图等)都是用高级算法语言(如C、 FORTRAN等)来编写。 2、程序软件包阶段: 出现了“应用子程序库”。 3、交互式语言阶段(仿真语言:仿真语言可用一 条指令实现某种功能,如“系统特征值的求解”, 使用人员不必考虑什么算法,以及如何实现等低 级问题。 4、模型化图形组态阶段:符合设计人员对基于模 型图形化的描述。
三、常见的几种仿真软件
PSPICE、ORCAD:通用的电子电路仿真软件, 适合于元件级仿真。 SYSTEM VIEW:系统级的电路动态仿真软 件 MATLAB:具有强大的数值计算能力,包含 各种工具箱,其程序不能脱离MATLAB环境 而运行,所以严格讲,MATLAB不是一种计 算机语言,而是一种高级的科学分析与计算软 件。 SIMULINK:是MATLAB附带的基于模型化 图形组态的动态仿真环境。
按计算机类型分类
1、模拟仿真:采用数学模型,在模拟计算机 上进行的实验研究。50年代 2、数字仿真:采用数学模型,在数字计算机 上借助于数值计算方法所进行的仿真实验。 60年代
3、混合仿真:结合了模拟仿真与数字仿真。 4、现代计算机仿真:采用先进的微型计算机,基于 专用的仿真软件、仿真语言来实现,其数值计算 功能强大,使用方便,易学。80年代以来
MATLABSimulink模型建立与仿真指南
MATLABSimulink模型建立与仿真指南第一章:MATLAB与Simulink简介MATLAB是一种高级的数值计算和科学分析的编程语言,由MathWorks开发。
它提供了强大的数学函数库和绘图工具,使得用户可以进行复杂的数值计算和数据可视化。
Simulink是MATLAB的扩展,是一种用于建立和仿真动态系统的图形化环境。
在MATLAB中,用户可以通过命令行或脚本文件进行计算。
而在Simulink中,用户可以利用图形化界面来搭建系统模型,并进行仿真。
Simulink提供了丰富的预置模块库,用户只需将这些模块连接起来,即可构建复杂的系统模型。
第二章:Simulink模型的基本组成Simulink模型由多个部分组成,包括输入信号、输出信号和系统组件。
输入信号可以是手动输入的常数,也可以是来自其他模型的信号。
输出信号是用户对系统模型感兴趣的结果。
系统组件即模型中的各个模块,这些模块可以完成各种功能,如乘法、滤波、逻辑运算等。
第三章:模型建立与仿真流程1. 确定系统模型的目标和需求:在建立模型之前,需要明确系统模型的目标和需求。
这些可能包括系统的输入输出关系、稳定性要求、性能要求等。
2. 模型建立:根据系统的目标和需求,选择合适的系统组件,并将其连接起来,构建系统模型。
可根据需要进行参数设置,以适应不同的场景。
3. 仿真设置:在进行仿真之前,需要设置仿真参数。
这些包括仿真时间、仿真步长等。
仿真时间指定了仿真的时间范围,仿真步长指定了仿真的时间间隔。
4. 仿真运行:设置好仿真参数后,可以运行仿真。
Simulink将逐步模拟系统的行为,并输出仿真结果。
第四章:Simulink模型调试与优化在进行仿真时,可能会发现模型存在问题,如输出不符合预期、系统不稳定等。
这时需要对模型进行调试和优化。
1. 系统调试:可以通过数据观察、信号域分析等方法,定位系统问题。
更换输入信号、输出信号,或调整模型参数,可以帮助发现问题。
matlab的simulink仿真建模举例 -回复
matlab的simulink仿真建模举例-回复Matlab的Simulink仿真建模举例Simulink是Matlab附带的一款强大的仿真建模工具,它能够帮助工程师们通过可视化的方式建立和调试动态系统模型。
Simulink通过简化传统的数学模型建立过程,使得工程师们能够更加直观地理解和分析复杂的系统。
在本文中,我们将介绍一个关于电机控制系统的Simulink仿真建模的例子。
一、了解电机控制系统在开始建模之前,我们首先需要了解电机控制系统的基本原理。
电机控制系统通常包括输入、电机和输出三个主要部分。
输入通常是来自于传感器或用户的命令信号,例如转速、位置或力矩。
电机是通过接受输入信号并根据特定的控制算法生成输出信号。
输出信号通常是电机的转速、位置或功率等。
控制算法通常采用比例-积分-微分(PID)控制或者其他控制算法。
二、建立Simulink模型1. 创建新的Simulink模型在Matlab主界面中,选择Simulink选项卡下的“New Model”创建一个新的Simulink模型。
2. 添加输入信号在Simulink模型中,我们首先需要添加输入信号模块。
在Simulink库浏览器中选择“Sources”类别,在右侧面板中找到“Step”模块,并将其拖放到模型中。
3. 添加电机模型接下来,我们需要将电机模型添加到Simulink模型中。
Simulink库浏览器中选择“Simscape”类别,在右侧面板中找到“Simscape Electrical”子类别,然后找到“Simscape模型”模块,并将其拖放到模型中。
4. 连接输入信号和电机模型将输入信号模块的输出端口与电机模型的输入端口相连,以建立输入信号与电机模型之间的连接。
5. 添加输出信号模块在Simulink模型中,我们还需要添加输出信号模块。
在Simulink库浏览器中选择“Sinks”类别,在右侧面板中找到“Scope”模块,并将其拖放到模型中。
第三章 matlab的simulink建模与仿真
3、信号组合与分支
3、运行仿真
四、simulink子系统介绍
1、子系统生成
在已有的系统模型中建立子系统
先建立空的子系统
2、建立复杂系统模型
自下向上的设计思路
自顶向下的设计思路
3.5 simulink与matlab的接口设计
一、使用工作空间变量设置系统模块参数
二、将信号输出到workspace
3、其它子系统
可配置子系统,代表用 户定义库中的任意模块, 只能在用户定义库中使用。 函数调用子系统。
for循环
信号组合器
信号探测器 信号维数改变器
函数调用发生器
向goto模块传递信号
选择或重组信号
信号属性修改 输入信号宽度
Sinks(系统输出模块库)
以数值形式显示输入信号
悬浮信号显示器
为子系统或模型提供输出端口 信号显示器 当输入非零时停止仿真 中断输出信号 将仿真数据写入.mat文件 将仿真数据输出到matlab工作空间 使用matlab图形显示器
三、从workspace中产生信号源
四、向量与矩阵
五、matlab function与function模块
Fcn: 用于实现简单函数关系 输入总表示成u(可是一向量) 输出是一标量 Matlab Fcn: 用于调用matlab函数实现某一 功能 所调用函数只能有一个输出 (可以是一个向量)
单输入函数只需要使用函数名, 多输入需引用相应的元素
在每个仿真步长内都需要调用 matlab解释器
例:信号平方运算
3.6 simulink子系统技术
一、回顾
1、通用子系统的生成
2、子系统的基本操作
子系统的命名
子系统的编辑
基于MATLAB的机电动力系统建模与仿真方法研究

基于MATLAB的机电动力系统建模与仿真方法研究机电动力系统是指组成系统的机械、电气和控制等部分之间相互作用的力学、电气和能量转换装置的集合。
其建模与仿真方法的研究对于系统的分析、优化以及性能评估十分重要。
本文将基于MATLAB的机电动力系统建模与仿真方法进行研究。
首先,机电动力系统的建模是基于实际系统的动力学和控制特性进行描述。
对于机械系统,可以使用欧拉-拉格朗日方法进行建模,得到系统的运动方程。
对于电气系统,可以使用基尔霍夫电流法、基尔霍夫电压法等方法进行建模。
对于控制系统,可以使用状态空间法或者传递函数法进行建模。
基于这些方法,可以将机电动力系统描述为一组常微分方程或者微分代数方程。
其次,仿真是利用计算机模拟机电动力系统的运行过程。
MATLAB作为一种强大的数学计算工具和仿真环境,可以实现机电动力系统的建模和仿真。
使用MATLAB的Simulink工具箱,可以构建机电动力系统的框图模型,并通过连接各个子系统的信号线来描述系统动态行为。
此外,Simulink还提供了丰富的信号处理、控制设计和参数优化等功能,方便进行系统仿真和性能评估。
在进行机电动力系统仿真之前,需要对系统的输入信号进行设定。
可以使用恒定输入、周期性输入或者随机输入等方式来模拟实际工作条件。
接下来,可以利用数值方法对系统模型进行求解,并通过绘制波形图、频谱图等方式来分析系统的响应和性能。
除了Simulink工具箱,MATLAB还提供了多种工具和函数用于机电动力系统的建模和仿真。
例如,MATLAB的Control System Toolbox提供了用于控制设计和分析的函数和工具;MATLAB的Simscape工具箱专门用于动态系统建模和仿真;MATLAB的Optimization Toolbox用于参数优化和系统辨识等。
总结起来,基于MATLAB的机电动力系统建模与仿真方法主要包括使用Simulink工具箱构建系统模型、设定输入信号、数值求解和性能分析等步骤。
基于Simulink的精梳机主传动机构建模与仿真

多电机分部传动提供 了准确的数据来源。该方法具有简洁高效、 精度高、 速度 快等特点。
关键 词 : 梳 机 ; 板 ; 离 罗拉 ; 态仿 真 精 钳 分 动
【 bt c】D nm cl e A s at ya i p 咖 r a
e o r s i i ehn m h i e dt e c i s ft nms o m cai s ft n p r n edt h g a sn s o e p a h a n
d nmi l eபைடு நூலகம்om  ̄ e ees l e i i uiks ̄ ae h hrc r t uvso i lc - y a c r r o sw r i a d w t Sm l o w r.T e c aat i i c r fds ae ap f mu t h n g es c e p
基 于 Smuik的精梳机 主传动机 构建模 与仿 真 i l n
徐 鹏程 孙振 国 黄 操
( 华大 学 机械 工程 系 先进 成形 制造 教 育部重 点 实验室 , 清 北京 108 ) 004
Mo eig a dsm ua ino o d l n i lt f mb r n o c e i r n miso c a im a e n smu ik man t s s in me h ns b s do i l a n
() a传动轮系 () b 连杆机构
动的控制系统 , 同时 , 只要修改仿真模块 中的参数就可 以不断优
化机构输 出特性 , 适应不 同的机型 。
图 1精梳机分离罗拉 传动机 构图
21连杆 机构 .
见图 lb , A 为输入杆 , ( )O 其转 速即为锡林转 速 ∞为常数 , , O 为输 出杆 。 建立如图所示 的直角坐标系 , 根据六连杆的闭环
机电系统动态仿真-基于MATLABSimulink课程设计

机电系统动态仿真-基于MATLAB Simulink课程设计简介机电系统是由电气、机械及控制部分组成的复杂系统。
动态仿真是一种研究系统行为的方法,可以帮助我们更好地理解系统的运行原理。
本课程设计旨在介绍机电系统动态仿真的基本原理和方法,并使用MATLAB Simulink软件进行实践操作。
课程内容本课程设计包括以下几个部分:1. 机电系统简介介绍机电系统的组成部分、基本特性及其应用场景,旨在让学生对机电系统有一个全面的认识和了解。
2. MATLAB Simulink简介介绍MATLAB Simulink的基本使用方法,包括模块的添加、参数的设置和仿真结果的显示等。
3. 机电系统建模使用MATLAB Simulink软件对机电系统进行建模,包括机械部分、电气部分及控制部分等。
4. 系统仿真利用所建立的机电系统模型进行系统仿真,包括控制器输出、系统响应等结果分析。
5. 结果分析对仿真结果进行对比分析,分析不同参数条件下系统的运行情况,找出系统的优化方案。
实践操作为了让学生更好地掌握机电系统动态仿真的基本原理和方法,本课程设计还包括以下的实践操作:1. 模型建立使用MATLAB Simulink工具箱,建立一个简单的机电系统模型。
2. 参数设置调整模型内参数,观察系统响应情况。
3. 仿真并分析结果执行仿真操作,对仿真结果进行分析,并尝试不同参数条件下系统的运行情况。
4. 优化方案结合分析结果,提出相应的优化方案,并重新设置参数进行仿真。
5. 实验报告整理实验数据、结果和分析,撰写实验报告。
实验环境本课程设计使用的软件工具为MATLAB Simulink,需要学生提前安装并掌握基本使用方法。
课程收获通过本课程的学习和实践操作,学生能够初步掌握机电系统动态仿真的基本原理和方法,了解MATLAB Simulink的基本使用方法,从而更好地理解机电系统的运行原理和优化方案。
同时,学生能够提高实际操作能力,加强分析和解决问题的能力。
65-基于SIMULINK的交流传动系统仿真

1 引言
交流电气传动系统包含了交流电机, 电力电 子技术 , 计算机控制等多学科理论及应用。 从应用 上讲, 基于矢量控制的通用变频器已大量投入市 场。 从理论上讲, 近几年交流电机的高性能抗干扰 控制成为控制理论界的一个研究热点 , 各种高级 控制算法不断出现。但是将控制算法应用于实际 系统通常需要花费大量的时间和精力 , 而且实际 系统中存在很多复杂非线性成分无法直接分析。 因此, 在实际实施前有必要对控制算法的有效性 以及整个系统的性能进行动态仿真。 M AT L AB 语言及 其 SIMU L INK 可视化 仿 真 平台在控制系统仿真中应用非常普遍。使用 SIMU LINK 可以迅速建立各种线性或非线性模 型 , 用户可以任意观测系统各处的动态变化 , 而且 仿真速度比使用 M AT L AB 语言更快。本文将讨 论基于 SIM UL INK 的交流传动系统仿真。一方 面用来验证新的控制方法, 另一方面在硬件实现
Simul ation of AC Electric Drive Systems by SIMULINK Ding Gang Han Zengjin
Abstract: T his paper address es t he sim ulat ion of A C elect ric drive sys t ems by a visualizat ion s imul at ion sof t ware, SIM U L IN K . T he n ew PO W ERS Y S tool box in M A TLA B5. 2 is int roduced and appl ied t o th e simu lation of a vect or cont rol of in duct ion mot ors . Bot h t he ad vant ages and d isadvant ages are inves t igat ed. A direct m et hod usi ng S IM U LIN K t o s imulat e t he h igh perf ormance cont rol of A C mot ors is als o pr esent ed . Th e gen eral appr oach t o th e simu lation of A C drive s yst em s is concl uded. Keywords : S IM U LIN K A C mot or dynam ic simu lat ion
基于Matlab_Simulink数控伺服系统的建模仿真
文章编号:1001-2265(2006)08-0067-03收稿日期:2006-02-27 3基金项目:广东省自然科学基金资助项目(32364);广东省高教厅基金资助项目(Z02067)作者简介:王小东(1981—),男,内蒙古赤峰人,五邑大学机电工程系硕士研究生,研究方向为数控系统及其仿真,(E -mail )wangxiaodong1816@ 。
基于Matlab /Si m ulink 数控伺服系统的建模仿真3王小东,王大承(五邑大学机电工程系,广东 江门 529020)摘要:利用M atlab /Si m ulink 软件,通过对永磁同步电机(P M S M )本体、d /q 坐标系向a /b /c 坐标系转换、三相电流源逆变器等功能模块建立与组合,构建了永磁同步电机控制系统的速度和电流双闭环仿真模型。
根据数控伺服系统的性能要求,进行参数选择及仿真。
仿真结果证明了该系统模型的有效性,为数控伺服控制系统的设计和调试提供了理论基础。
关键词:M atlab /Si m ulink;数控伺服系统;永磁同步电机;仿真中图分类号:TP273 文献标识码:AS i m ul a ti on and M odeli n g of P M S M Ba sed on M a tl abWANG Xiao 2dong,WANG Da 2cheng(Depart m ent of Mechanical and Electrical Engineering,W uyi University,J iang men Guangdong 529020,China )Abstract:I n Matlab /Si m ulink,the bl ocks,such as P MS M bl ock,coordinate transfor mati on f or med q /d t o a /b /c bl ock,three phase current s ource inveter contr oller bl ock,etc .have been modeled .By the organic combi 2nati on of these bl ocks,t w o contr ol l oop s are used .The para meters are chosed by the perf or mance of servo sys 2te m.The reas onability and validity have been testified by si m ulate result and this novel method offers a ne w thought for designing and debugging actual mot or .Key words:Matlab /Si m ulink,NC servo syste m;P MS M ,si m ulati on0 引言数控机床的伺服系统一般由电流环和速度环组成[1]。
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
基于MATLAB的机电动力系统建模与仿真方法研究

基于MATLAB的机电动力系统建模与仿真方法研究机电动力系统是指由电力系统和机械系统组成的复杂系统,它涉及到电力的生成与传输、机械运动的控制和能量转化等多个方面。
对于机电动力系统的建模与仿真,可以通过MATLAB软件来进行研究和实现。
一、机电动力系统建模方法1. 电力系统建模:电力系统由发电机、变压器、电缆、断路器、负载等组成,可以将其建模为电气网络。
可以使用MATLAB的Simulink工具箱来建立电力系统模型。
在建立模型时,需要考虑发电机的动力学特性、负载的特性以及电路的拓扑结构等,可以采用不同的电路元件进行建模,如电阻、电感、电容等。
2. 机械系统建模:机械系统由电动机、传动装置、负载等组成,可以将其建模为动力学系统。
可以使用MATLAB的Simulink工具箱来建立机械系统模型。
在建立模型时,需要考虑电动机的转矩特性、传动装置的动力学特性以及负载的特性等,可以采用不同的机械元件进行建模,如惯性元件、摩擦元件等。
3. 机电耦合建模:机电动力系统是电力系统和机械系统的耦合系统,需要将电力系统和机械系统的模型进行耦合建模。
可以使用MATLAB的Simulink工具箱来建立机电耦合模型。
在建立模型时,需要考虑电力系统和机械系统之间的能量转换和信息传递等关系,可以通过引入耦合元件和耦合方程来实现机电耦合模型。
二、机电动力系统仿真方法1.参数仿真:通过改变机电动力系统的参数来进行仿真分析。
可以通过修改电力系统和机械系统的参数,如发电机的额定功率、电动机的额定电流等,来分析机电动力系统的性能指标,如功率因数、效率等。
2.稳态仿真:用于分析机电动力系统的稳定运行状态。
可以根据机电动力系统的稳态方程,设置合适的边界条件,进行稳态仿真分析,包括功率平衡、电压稳定等。
3.动态仿真:用于分析机电动力系统的动态响应。
可以通过给系统施加不同的输入信号,如负载变化、电压突变等,来研究机电动力系统的瞬态响应和稳定性能,如过电压、过电流等。
MatlabSimulink系统建模与仿真

课程设计任务书设计题目Matlab/Simulink系统建模与仿真设计要求1.认真学习并熟练掌握Matlab/Simulink软件的应用及仿真。
2.按照题目1给出的要求建立起Simulink模型,并进行仿真,仿真完成后,可以由MATLAB命令可以得出输出信号波形。
3.按照题目2给出的要求,建立起系统的Simulink仿真模型,并绘制出滤波前后频谱波形。
工作计划2011.6.19查询资料,下载相关软件并正确安装。
2011.6.20-6.25学习相关软件,并按要求进行模型设计,应用相关软件进行仿真。
2011.6.26检查仿真结果并提交完成好的设计报告。
指导老师:教研室主任:电子信息课程设计Matlab/Simulink通信系统建模与仿真一、设计目的:学习Matlab/Simulink的功能及基本用法,对给定系统进行建模与仿真。
二、基本知识:Simulink是用来对动态系统进行建模、仿真和分析的软件包,依托于MATLAB丰富的仿真资源,可应用于任何使用数学方式进行描述的动态系统,其最大优点是易学、易用,只需用鼠标拖动模块框图就能迅速建立起系统的框图模型。
三、设计内容:1、基本练习:(1)启动SIMULINK:先启动MATLAB,在命令窗口中键入:simulink,回车;或点击窗口上的SIMULINK图标按钮。
(2)点击File\new\Model或白纸图标,打开一个创建新模型的窗口。
(3)移动模块到新建的窗口,并按需要排布。
(4)连接模块:将光标指向起始模块的输出口,光标变为“+”,然后拖动鼠标到目标模块的输入口;或者,先单击起始模块,按下Ctrl键再单击目标模块。
(5)在连线中插入模块:只需将模块拖动到连线上。
(6)连线的分支与改变:用鼠标单击要分支的连线,光标变为“+”,然后拖动到目标模块;单击并拖动连线可改变连线的路径。
(7)信号的组合:用Mux模块可将多个标量信号组合成一个失量信号,送到另一模块(如示波器Scope)。
matlab-SIMULINK仿真实例解析
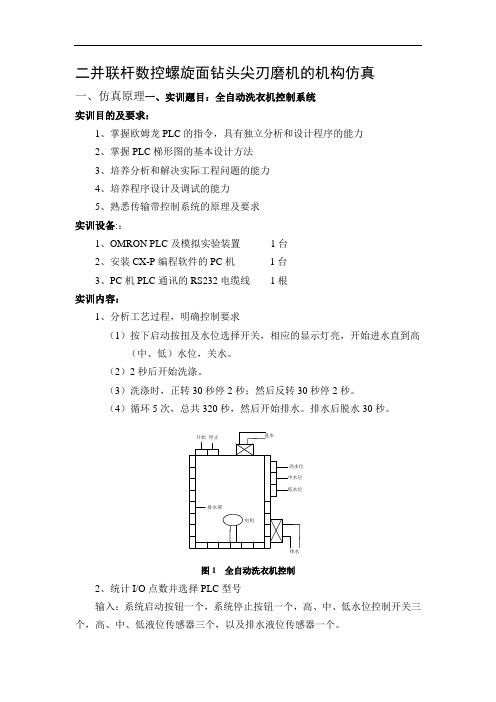
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
matlabsimulink动力学建模与仿真
matlabsimulink动力学建模与仿真
Matlab Simulink是一种功能强大的动力学建模和仿真软件。
它
可以帮助工程师和科研人员以直观的方式创建和分析各种系统的数学
模型。
使用Matlab Simulink,我们可以轻松地建立复杂的动力学系统模型,例如机械系统、电力系统、控制系统等。
Matlab Simulink提供了丰富的图形化建模功能,用户可以使用
预定义的模块和组件来组装模型。
这些模块包括各种传感器、执行器、控制器等,用户只需拖拽和连接这些模块即可快速搭建所需的系统模型。
用户还可以通过自定义模块来增加系统的特定功能。
在模型建立完成后,Matlab Simulink提供了各种仿真和分析工具,可以帮助用户验证和优化系统设计。
用户可以设置仿真参数,例
如仿真时间、信号输入等,然后运行仿真以观察系统的动态行为。
通
过仿真结果,用户可以评估系统的性能指标,并进行参数调整和优化。
此外,Matlab Simulink还支持与MATLAB的深度集成,用户可以在仿
真过程中使用MATLAB的强大数学和数据处理功能。
总之,Matlab Simulink是一个强大的动力学建模和仿真工具,
它可以帮助工程师和科研人员快速建立和分析各种系统模型。
通过使
用Matlab Simulink,我们可以更好地理解和预测系统的行为,从而提供有效的解决方案。
基于SIMULINK的交流传动系统仿真

基于SIMULINK的交流传动系统仿真一、系统模型概述本系统是基于SIMULINK可视化动态仿真平台针对交流传动系统进行的仿真。
该模型利用Matlab软件中的SimPowerSystem工具箱里的各种电力器件模型建立了交流电力系统的一个仿真模型。
为了讨论方便,该模型结合异步电机的转子磁场定向矢量控制来进行仿真实验,系统的SIMULINK模型如下图所示。
图 1 异步电机矢量控制SIMULINK仿真结构图二、相关模块介绍1.Powergui该模块不仅可以给你提供解决线路问题的三个办法(连续,离散,向量),而且还可以显示测量的电流电压的值、修改初始状态、执行负载流量使得仿真在稳定状态下进行、显示的阻抗频率曲线、对结果进行FFT分析、对系统生成状态空间模型、生成包含测量稳态值得报表、饱和变压器的滞回特性。
2.异步电机该模块选用标准单位模型,转子电压短路。
3.比例积分调节器速度控制器,磁场控制器和转矩控制器均为比例-积分(PI)调节器。
4.函数发生器该模块生成转子磁场电流幅值参考信号,基速以上实现弱磁调速。
5.电流控制PWM逆变器该模块包括电流比较控制和PWM逆变器两部分,其中逆变器可以使用MOSFET电力电子器件或可控电压源,只是可控电压源要比MOSFET电力电子器件仿真速度更快。
6.磁链估计模型该模块是一个封装模块,各参数有对应的方程(见论文)。
7.输入信号输入信号包括速度信号和负载转矩。
速度指令为速度控制器提供信号,负载转矩为异步电机提供输入信号。
8.测量模块系统中至少包括一个测量环节,主要有转速测量,异步电机的线电压测量,电流测量等9.坐标变换模块系统包括3相与2相静止坐标变换,定子2相静止坐标与转子磁场2相旋转坐标变换。
三、仿真及结果分析开始仿真后,SimPowerSystem将会自动分析模型的电路结构,生成线性电路相应的状态空间SIMULINK模型,并加入已建立好的电机等非线性模型,然后开始整个系统的仿真。
传动系统(驱动系统)的力学建模与仿真SimDriveLine
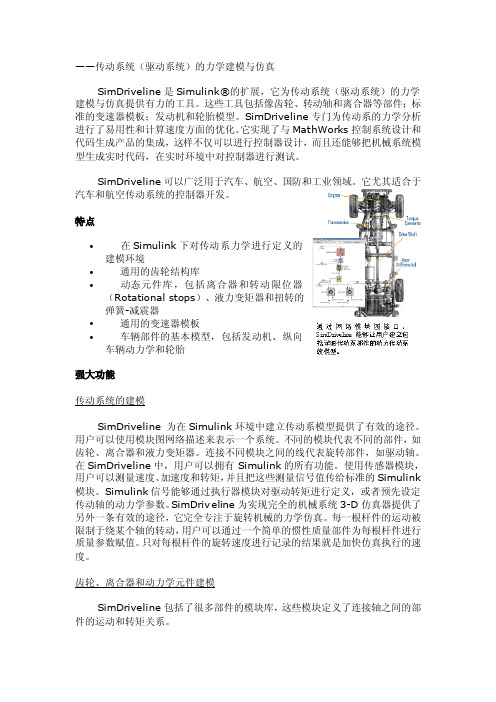
——传动系统(驱动系统)的力学建模与仿真SimDriveline是Simulink®的扩展,它为传动系统(驱动系统)的力学建模与仿真提供有力的工具。
这些工具包括像齿轮、转动轴和离合器等部件;标准的变速器模板;发动机和轮胎模型。
SimDriveline专门为传动系的力学分析进行了易用性和计算速度方面的优化。
它实现了与MathWorks控制系统设计和代码生成产品的集成,这样不仅可以进行控制器设计,而且还能够把机械系统模型生成实时代码,在实时环境中对控制器进行测试。
SimDriveline可以广泛用于汽车、航空、国防和工业领域。
它尤其适合于汽车和航空传动系统的控制器开发。
特点•在Simulink下对传动系力学进行定义的建模环境•通用的齿轮结构库•动态元件库,包括离合器和转动限位器(Rotational stops)、液力变矩器和扭转的弹簧-减震器•通用的变速器模板•车辆部件的基本模型,包括发动机、纵向车辆动力学和轮胎强大功能传动系统的建模SimDriveline为在Simulink环境中建立传动系模型提供了有效的途径。
用户可以使用模块图网络描述来表示一个系统。
不同的模块代表不同的部件,如齿轮、离合器和液力变矩器。
连接不同模块之间的线代表旋转部件,如驱动轴。
在SimDriveline中,用户可以拥有Simulink的所有功能。
使用传感器模块,用户可以测量速度、加速度和转矩,并且把这些测量信号值传给标准的Simulink 模块。
Simulink信号能够通过执行器模块对驱动转矩进行定义,或者预先设定传动轴的动力学参数。
SimDriveline为实现完全的机械系统3-D仿真器提供了另外一条有效的途径,它完全专注于旋转机械的力学仿真。
每一根杆件的运动被限制于绕某个轴的转动,用户可以通过一个简单的惯性质量部件为每根杆件进行质量参数赋值。
只对每根杆件的旋转速度进行记录的结果就是加快仿真执行的速度。
齿轮、离合器和动力学元件建模SimDriveline包括了很多部件的模块库,这些模块定义了连接轴之间的部件的运动和转矩关系。
Simulink在现代交流传动系统中建模与仿真方法的研究

上最为流行的软件之一 。它自问世起 , 就以数值计 算称雄 ,它的图形可视能力在所有数学软件中也是 首屈一指的 。Matlab 提供了众多的工具箱 , 动态系 统仿真工具 Simulink 是其主要工具箱之一 , 其主要 功能是对动态系统做适当分析 , 可以在做出实际系 统之前 ,预先对系统进行仿真和分析 ,并可以做适当 地实时修正 ,提高系统的性能 , 减少系统修改时间 , 实现高效开发系统的目的 。
・2 9 ・
图1 定子磁链的电动机仿真模型
图2 经过封装后的定子磁链的电动机仿真模型
模型的输入是电动机的定子电压 Us 和电流 i s 及转子转速 ω , 输出定子磁链 Ψs 和电流 i s 及转矩
Td ,实际电流和估计电流可以用来调整模型的精度 。
参数的输入有以下几种方法 : ( 1) 打开子系统模块对话框 , 逐个模块输入参 数。
Simulink 是一个比较特别的工具箱 , 它是一个
进行动态系统建模 、 仿真和综合分析的集成软件包 。 它的出现可以使仿真工作以结构图的形式加以进 行 , 且采用分层结构 。从建模角度讲 , 这既适合于
T op - down 的设计流程 , 又适合于 Bottum - up 逆程
ห้องสมุดไป่ตู้
设计 。从仿真角度讲 , Simulink 模型不仅能让用户 知道具体环节的动态细节 , 而且能够让用户清晰地 了解各种器件 、 各子系统 、 各系统间的信息交换 , 掌 握各部分之间的交互影响 , 同时可以借助模拟示波
( 2) 通过 Simulink 的 Mask 封装功能 , 创建该子
由比 ,可以看到采用 Subsystem 非常地方便 、 简捷 ,尤 其在复杂的系统建模中表现得更为突出 。
基于MATLABSimulink的机电一体化系统的仿真分析实验
实验五、基于MATLAB/Simulink的机电一体化系统的仿真分析实验一、实验目的机电一体化系统建模是进行机电一体化系统分析与设计的基础,通过对系统的简化分析建立描述系统的数学模型,进而研究系统的稳态特性和动态特性,为机电一体化系统的物理实现和后续的系统调试工作提供数据支持,而仿真研究是进行系统分析和设计的有利方法。
本实验目的在于通过实验使同学对机电一体化系统建模方法和仿真方法有初步的了解,初步掌握在MA TLAB/ SIMULINK环境下对机电一体化系统数学模型进行仿真的方法。
(1)掌握机电一体化系统数学建模的基本方法(2)掌握机电一体化系统数学仿真的基本方法和步骤。
(3)掌握在MA TLAB/ SIMULINK环境下对机电一体化系统数学模型进行仿真的方法。
二、实验器材(1)计算机(2)MA TLAB/ SIMULINK软件三、实验原理(一)建立数学模型以一定的理论为依据把系统的行为概括为数学的函数关系,包括以下内容:1)确定模型的结构,建立系统的约束条件,确定系统的实体、属性与活动。
2)测取有关的模型数据。
3)运用适当理论建立系统的数学描述,即数学模型。
4)检验所建立的数学模型的准确性。
机电一体化系统数学模型的建立是否得当,将直接影响以此为依据的仿真分析与设计的准确性、可靠性,因此必须予以充分重视,以采用合理的方式、方法。
(二)机电一体化系统的计算机数字仿真实现1)根据已建立的数学模型和精度、计算时间等要求,确定所采用的数值计算方法。
2)将原模型按照算法要求通过分解、综合、等效变换等方法转换为适于在数字计算机上运行的公式、方程等。
3)用适当的软件语言将其描述为数字计算机可接受的软件程序,即编程实现。
4)通过在数字计算机上运行,加以校核,使之正确反映系统各变量动态性能,得到可靠的仿真结果。
(三).凑试法确定PID调节参数凑试法是通过模拟或闭环运行(如果允许的话)观察系统的响应曲线(例如阶跃响应),然后根据各调节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID调节参数。
Matlab中的Simulink和SimMechanics做仿真
这里我们利用Matlab中的Simulink和SimMechanics做仿真,那么先来看看相关的资料。
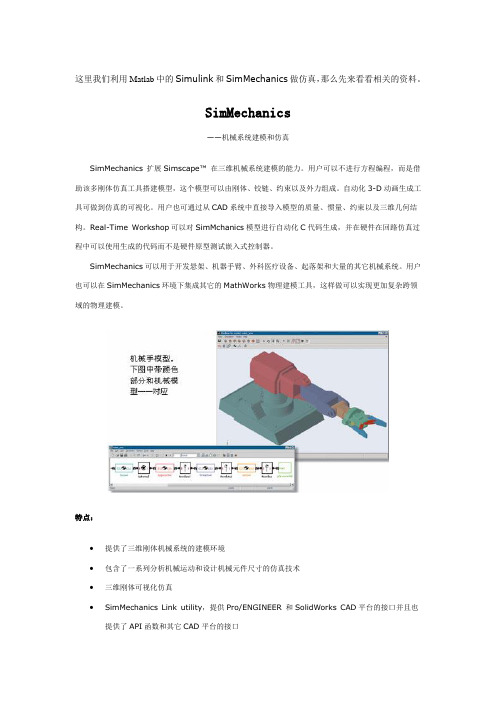
SimMechanics——机械系统建模和仿真SimMechanics 扩展Simscape™ 在三维机械系统建模的能力。
用户可以不进行方程编程,而是借助该多刚体仿真工具搭建模型,这个模型可以由刚体、铰链、约束以及外力组成。
自动化3-D动画生成工具可做到仿真的可视化。
用户也可通过从CAD系统中直接导入模型的质量、惯量、约束以及三维几何结构。
Real-Time Workshop可以对SimMchanics模型进行自动化C代码生成,并在硬件在回路仿真过程中可以使用生成的代码而不是硬件原型测试嵌入式控制器。
SimMechanics可以用于开发悬架、机器手臂、外科医疗设备、起落架和大量的其它机械系统。
用户也可以在SimMechanics环境下集成其它的MathWorks物理建模工具,这样做可以实现更加复杂跨领域的物理建模。
特点:∙提供了三维刚体机械系统的建模环境∙包含了一系列分析机械运动和设计机械元件尺寸的仿真技术∙三维刚体可视化仿真∙SimMechanics Link utility,提供Pro/ENGINEER 和SolidWorks CAD平台的接口并且也提供了API函数和其它CAD平台的接口∙能够把模型转化为C代码(使用Real-Time Workshop)∙由于集成在Simulink环境中,因此可以建立高精度、非线性的模型以支持控制系统的开发和测试。
强大功能:搭建机械系统模型使用SimMechanics用户仅需要收集物理系统信息即可建立三维机械系统模型。
使用刚体、坐标系、铰链和作用力元素定义和其它Simulink模型直接相连的部分。
这个过程可以重用Simulink模型以及扩展了SimMechanics工具的能力。
用户还可把Simulink模型和SimMechnics模型集成为一个模块,并可封装成可在其它模型中复用的子系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言精梳机的主传动机构包括钳板和分离罗拉传动机构,作为精梳机的关键运动部件,其好坏直接影响着精梳机的档次和性能。
为了实现精梳机的多电机分部传动,首先必须模拟再现原精梳机钳板和分离罗拉传动机构的机械模型,得到其运动规律和数据。
目前对精梳机运动分析采用比较多的是解析法[1-2],计算各个分度的位置,但求解复杂,不直观,计算量大,很多时候运动方程难以求解。
鉴于这种情况,通过建立传动机构的运动学模型,列出其微分方程,利用matlab的Simulink[3]仿真工具包实现对运动方程的隐式求解,从而可以回避机械构件的位置问题,可以准确、快速地得到各个位置的速度、加速度参数,提供给精梳机多电机传动的控制系统,同时,只要修改仿真模块中的参数就可以不断优化机构输出特性,适应不同的机型。
2分离罗拉传动机构建模及仿真精梳机分离罗拉传动机构采用的是六连杆机构和外差动式行星轮系相结合的方式(图1)其中行星轮系提供的是恒速运动,使分离罗拉顺转,而六连杆机构则使分离罗拉作顺转和倒转的变速运动,在一个工作循环中,分离罗拉包括正转、顺转、基本静止三种状态,且正转量大于顺转量。
整个机构比较复杂,运动量也较大,工作质量要求高,是影响精梳机工作的关键机构之一。
(a)传动轮系(b)连杆机构图1精梳机分离罗拉传动机构图2.1连杆机构见图1(b),O1A为输入杆,其转速即为锡林转速ω,为常数,O2D为输出杆。
建立如图所示的直角坐标系,根据六连杆的闭环矢量方程可得到运动方程:(1)基于Simulink的精梳机主传动机构建模与仿真徐鹏程孙振国黄操(清华大学机械工程系先进成形制造教育部重点实验室,北京100084)ModelingandsimulationofcombermaintransmissionmechanismbasedonsimulinkXUPeng-cheng,SUNZhen-guo,HUANGCao(KeyLaboratoryforAdvancedMaterialsProcessingTechnology,MinistryofEducation,DepartmentofMechanicalEngineering,TsinghuaUniversity,Beijing100084,China)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!!!!!!!"【摘要】针对精梳机的钳板和分离罗拉传动机构,建立运动学模型,并利用Simulink进行了动态仿真,得到各机构的运动特性曲线。
通过修改仿真参数可优化机构运动特性,同时为精梳机的多电机分部传动提供了准确的数据来源。
该方法具有简洁高效、精度高、速度快等特点。
关键词:精梳机;钳板;分离罗拉;动态仿真【Abstract】Dynamicalperformancesoftransmissionmechanismsofthenipperandthedetachingrolleronacomberwereanalyzed,andthemathematicalmodelswerebuiltup.Basedonthemodels,thedynamicalperformancesweresimulatedwithSimulinksoftware.Thecharacteristiccurvesofdisplace-ment,velocityandaccelerationwerepresented.Thetransmissionmechanismswereoptimizedbymodify-ingsimulationparameters.Featuredwithadvantagesofsimplicity,accuracyandefficiency,thismethodprovidesusefuldataforthedesignofamulti-motorcomberdrivingsystem.Keywords:Comber;Nipper;Detachingroller;Dynamicalsimulation中图分类号:TH112文献标识码:A*来稿日期:2007-04-29文章编号:1001-3997(2008)01-0061-022227262890332118DO1O2dbO3O1aDCAYBl7l6l5l1l2l3c!7!6!1!3!2锡林主轴分离罗拉28第1期2008年1月-61-MachineryDesign&Manufacture机械设计与制造对(1)式求导可得到速度关系的运动方程:(2)对(1)式二次求导可得到加速度关系的运动方程,并整理为矩阵如下:(3)2.2分离罗拉整体运动分析见图1(a),由行星轮系的计算公式可得分离罗拉的运动方程:(4)式中:S1、S2、S3—分别为恒速部分位移、变速部分位移、总位移;C—分离罗拉位移比,即末轮每转动一齿时分离罗拉的位移量;θ7_18、θH—分离罗拉倒转开始时摆杆O2D的角度以及锡林转过角度。
2.3仿真及结果据机构运动方程(1) ̄(4)利用Simulink建立仿真模型[4],如图2所示:图2分离罗拉传动机构的仿真模型模块中各个构件物理参数为:l1=25.3mm,l2=160mm,l3=119mm,l4=160mm,l5=68mm,l6=66mm,a=125mm,b=126.4mm,c=66.33mm,d=119.22mm,ω=26.17弧度/秒(即锡林钳次为250r/min),Z0=18,ZH=90,Z1=33,Z2=21,Z3=26,Z4=28,C=13.14mm。
以分离罗拉开始倒转θ1=231.9!时作为机构的起始位置,代入上述模型,结果如图3、图4所示:图3分离罗拉位移曲线图4分离罗拉速度及加速度曲线3钳板传动机构建模及仿真钳板的传动采用曲柄-滑块-滑杆机构,其传动机构图可简化为图5所示。
在图5中,O、O1分别为锡林和钳板的中心,A即为滑块,O1A为滑杆。
设OA=r,O1A=l,O1O=L。
图5钳板传动机构图采用与分离罗拉同样的分析方法,可得到钳板的运动方程:(5)(6)(7)式中:"—为锡林即曲柄OA的角速度;ALOO1X#11r0角速度角加速度98.186137.618-4847.9-116.7518分度变速位移S2总位移S恒速位移S133.76分度38-57.621022263034261014182018-20-40-60lntegratorlntegrator1lntegrator2lntegrator3lntegrator4lntegrator5摆杆速度摆杆角度摆杆加速度六连杆运动方程MATLABFunctionMATLABFunctionMATLABFun分离罗拉角加速度分离罗拉角速度恒速部分位移变速部分位移分离罗拉合成拉移rollerWorkspace角度锡林速度1s1s1s1s1s1s1s1s1s1s-62-第1期徐鹏程等:基于Simulink的精梳机主传动机构建模与仿真l!—为滑杆O1A长度变化的速度;!1—为钳板即滑杆O1A的角速度。
基于Simulink的仿真模型与前节类似,此处略去图示。
以锡林转角θ=0"时为机构的起始位置,r=70mm,L=207mm,!=26.17弧度/秒。
利用模型进行仿真,结果如图6所示:图6钳板运动曲线4结果分析通过比较可以发现,利用Simulink仿真所计算的结果与实际应用[5-6]是吻合的。
而利用Simulink可以方便地实现不同参数下的仿真。
以钳板为例,对r分别取75mm,70mm,65mm进行仿真,可得到不同的加速度特性曲线(图略)。
设计者可以根据实际需要确定参数。
5结论通过对精梳机的钳板和分离罗拉的传动机构进行分析,推导出机构的运动学方程,并利用Simulink工具建立运动学仿真模型,得到包括六连杆机构、行星轮系、曲柄滑块滑杆机构在内的机构运动特性曲线,为精梳机的多电机传动提供了数据来源。
该方法简洁高效,避免了对精梳机各分度下位置、速度、加速度的直接求解,且可以根据多电机控制系统的需要,计算出任意位置点的参数。
同时,采用Simulink模型仿真只要修改入口参数就可以改变精梳机传动机构的运动特性,而无需对运动方程重新进行复杂的求解,为精梳机的改进提供了一个简单有效的途径。
参考文献1任家智.E7/5型精梳机钳板传动机构分析[J].棉纺织技术,1998,26(6):336 ̄340.2赵宁.FA261/ZF精梳分离接合机构的分析[J].西北纺织工学院学报,1999,13(2):158 ̄163.3王沫然.Simulink4建模及动态仿真[M].北京:电子工业出版社,2002.4武娟,任家骏等.基于MATLAB软件中SIMULINK的机构运动仿真[J].机械工程与自动化,2004(3):4 ̄6.5陆再生.棉纺设备[M].北京:中国纺织出版社,1995.6李营建,肖丰.E7/4型精梳机钳板机构作用分析[J].郑州纺织工学院学报,2001,12(4):32 ̄35.24分度24374.79926.614819.763519.7640-13.3766角位移!1角速度!1角加速度#1一种新型篮球轮椅的结构设计与有限元分析*马笑玲雷蕾关天民(大连交通大学机械工程学院,大连116028)StructuredesignandFEanalysisofanewlybasketballwheelchairMAXiao-ling,LEILei,GUANTian-min(MechanicalEngineeringInstitute,DalianJiaotongUniversity,Dalian116028,China)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!!"!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!!"【摘要】基于人机工程学的理论对篮球轮椅进行了结构设计,采用了PRO/E软件对篮球轮椅进行三维实体造型,并利用I-DEAS软件对篮球轮椅进行了有限元计算分析,计算结果验证了所设计的篮球轮椅的安全性。
关键词:人机工程学;篮球轮椅;结构设计;有限元分析【Abstract】BasedonthehumanengineeringtheorythestructureofthenewlyBasketballwheelchairisdesigned.AndthethreedimensionalmodelisdrawnbymeansofthePRO/Esoftwareafterthedesign,andtheFEmethodofI-DEASsoftwareisusedtocalculatetheintensity,thecalculatingresultsshowthatthenewlyBasketballwheelchairissafe.Keywords:Humanengineering;Basketballwheelchair;Structuraldesign;FEanalysis中图分类号:TH12,O241.82文献标识码:A*来稿日期:2007-04-26*基金项目:大连市计划项目(2004A1GX059)和世界轮椅基金会(美国)资助项目文章编号:1001-3997(2008)01-0063-031概述随着人们生活质量的不断提高,在轮椅的帮助下,已经有越来越多的残疾人参与社会活动。