基于AT90CAN128单片机的高炉烧结配料系统设计CAN总线通信部分
基于AT90CAN128步进电机控制驱动系统模块设计

片 机 供 电 , 强 电 给 步 进 电 机 驱 动 供 电 , 且 两 电源 不 共 地 。
4 系 统 程 序 设 计
主 程 序 设 计 流 程 图 如 图 3所 示 。 程 序
在 初 始 化 时 , 由 于 本 系 统 定 时 器 设 置 成 比 较 匹 配 清 0模 式 , 所 以 初 始 化 时 需 要 把 两 台 电 机 发 出 脉 冲 CP对 应 的 端 口 B 和 端 口 E 的 OC1 口 和 OC3 口设 置 成 0 否 则 无 法 A A , 产 生 触 发 脉 冲 。 状 态 信 号 P0S1 ,POS 2和
・
数 字技 术 ・
系统 内可编 程 FL H,4 E P l 和 4 AS K E ROM K
S RAM ,5 3个 通 用 I O 口 ,4个 具 有 比 较 模 / 式 的 定 时 器 /计 数 器 , 1 8通 道 1 个 0位 A/ D 转 化 器 , 1个 可 编 程 看 门 狗 定 时 器 , 1个 JTA 测 试 接 口 等 。 运 动 控 制 中 由 G AT9 CAN 1 片 机 发 出 脉 冲 信 号 CP, 0 8单 2
是脉 冲 分 配 器 。L 9 2 7还 设 有 两 个 PW M 斩 波 器 来 控 制 线 绕 组 电 流 , 实 现 恒 流 斩 波 控 制 , 以获 得 良好 的 转 矩频 率 特 性 。 可 有半 部 , 整 部 和 波 状 三 种 驱 动 模 式 。 H/F悬 空 表 示 整 部 工 作 方 式 。 该 器 件 的 一 个 显 著 特 点 是 仅 需 要 脉 冲 CP,方 向 DI 以 及 启 / 停 R 状态 P 0S信 号 , 步 进 电 机 所 需 相 位 由 电 路 内 部 产 生 , 大 大 减 轻 了 CPU 的 负 担 。 接 线 时 启 /停状 态 P OS接 L 9 2 7的 e a l n b e管 脚 。 L9 2 7的 基 准 电 压 输 入 端 r f 用 于 确 定 电 机 e
基于AT90CAN128单片机的某车型CAN总线系统设计
基于AT90CAN128单片机的某车型CAN总线系统设计引言现场总线技术[1]是目前自动化控制领域发展比较迅速的一门技术,其中CAN(Controller Area Network)总线[2]是在国际上应用最广泛的现场总线之一。
近几年随着汽车电子行业的发展,现代汽车中CAN 总线已经成为必须采用的装置之一。
本文以ATMEL 公司新近生产的一款内置CAN 控制器的单片机——AT90CAN128 为基础,设计了一款车载CAN 总线系统,通过CAN 智能测控仪表对车中部分单元参数量进行实时监控,使各单元之间协调运转。
另外,传输线束大大简化,可靠性得到了极大的提高,有效节约了线束安装空间和系统成本。
1AT90CAN128 特性概述1.1 基本特性AT90CAN128[3]是基于AVR RISC 结构的8 位低功耗CMOS 微处理器,它采用了先进的指令集以及单周期指令执行时间,其数据吞吐率高达1MIPS/MHz,其内核具有丰富的指令集和32 个通用工作寄存器。
所有寄存器都直接与ALU 相连接。
通过将8 位RISC CPU 与系统内可编程的Flash 集成在一个芯片内,为许多嵌入式控制应用提供了灵活而低成本的方案。
1.2内置CAN 控制器概述AT90CAN128 内置有完全符合CAN2.0A 和2.0B 标准协议的CAN 控制器。
采用MOb(消息对象)方式进行数据的发送和接收,共有15 个MOb,它们具有相同的属性:有11 位标识符(2.0A 协议),也可扩展至29 位(2.0B 议);8 位数据缓冲(静态分配);Tx,Rx 帧缓冲或自动响应配置;时间标识。
CAN 控制器的结构如图1 所示。
基于AT90CAN128的CAN总线数据采集节点设计
45 真 空中高压 电极的单次脉冲沿面 闪络耐压 .
程焰林 向 伟 雷杨俊
氧化铝陶瓷以其优 良的机 电性能在特种电真空器件中被广泛应用,起着高压绝缘、真空密封以及支撑 固定的作用。随着脉冲功率技术和 电真空器件技术的迅速发展,对氧化铝陶瓷的耐压性能提出了更高的要 求 。实践表明,在真空条件下,氧化铝陶瓷绝缘子耐压水平往往低于其体击穿强度和相 同尺寸的真空间隙 的耐压水平,其原因就是绝缘子表面发生了沿面闪络击穿。针对真空器件在特定的环境中,氧化铝陶瓷绝 缘子表面绝缘能力的提高已成为电真空领域所关注和亟待解决的问题之一。电极作为高压的加载对象 ,其 结构上的变化对绝缘子沿面耐压有着至关重要的作用 。国外早在 2 世纪 6 年代就有相关报道,但在单次 O 0 微秒级脉冲加载电压下缺少实验研究和系统分析, 文中对几种新型电极结构进行 了场强仿真计算和实验研
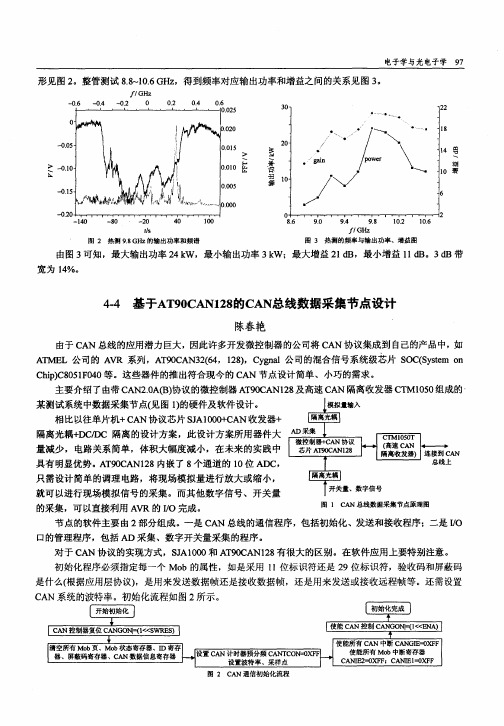
有 空余 的发送 Mo b的情 况下 ,将 转换好 的数字信 号写入 某一 发送 Mo b中 ,然后 由 C NC MO A D B寄存 器来 控制 发送动 作 ,将 消息发送 出去 。若 多于 8 B,由于 C N 的一帧报 文最 多 只能传 送 8 A B的数据 ,所 以只 能 把所 有 的数 据 分成几 个标准 帧发送 到 总线上 。发送 与接 收流程 如 图 3所 示 。
C N 控制 器复位 C NCO A A , N ̄ I< WR S < S E) 清 空 所有 Mo 、Mo 态寄存 器 、I 寄存 b页 b状 【 ) 器、屏蔽码寄存器、C N数据信息寄存器 A
【丝 塞 J 塑 壁
设置 C N计时器预分频 C NT O A A C 设置波 特 率、采 样 点
主要 介绍 了由带 C N20 B协 议 的微控 制 器 A 9C N18 高速 C N 隔 离收发 器 C M 15 A . A() T0A 2及 A T 00组成 的
基于AT90CAN128单片机CAN总线实现方案的研究
1 )能够 处理所 有 的帧类型 ( 据 帧 、 数 远程 帧 、 错
误 帧 和超载 帧) ;
2 )具有 1 个 独立 的信息 对象 : 5
( )1 1 1位的标 志码 ( 准 2 0 , 9位 的标 志 标 . A) 2 码( 标准 2 0 ) ( )1 位 的屏蔽 码 ( . B ;2 1 标准 2 0 ,9 . A) 2
较 为 常见 的 方 法 是 用 单 片 机 与 C AN 控 制 器 相 结 合, 如使 用 ATME GA1 8和 S A1 0 2 J 0 0芯 片[ , 文 2本 J 介 绍 的是一 种新 型 的 内嵌 C AN控 制 器 的 AVR型 单片机 A 0 AN1 8 实现 C T9 C 来 2 AN 节点 的方法 .
主要 软件 的 程序 源代 码 .
关键词 : A 总线; VR; C N A 单片机
中 图 分 类 号 : P 3 T 36 文献标识码 : A
C AN( o tol e t r ) C nr l rAraNewo k 总线是 目前 最 e 有前 途 的几种 现场 总 线 之一 , 广 泛 应 用于 汽 车 以 被 及各 种工 业控制 系统 中. AVR型 单片 机采用 增强 型
Vo . 6 No 1 12 .
Fe . 0 7 b 20
文章 编 号 :0 14 7 ( 0 7 0 —0 2 0 1 0 — 3 3 2 0 ) 10 3 — 3
基于 A C T9 AN1 8单 片 机 C O 2 AN 总 线 实现 方 案 的研 究
李 积 英
( 兰州交通大学 电子与信息工程学院, 甘肃 兰州 707) 3 00
个 主从 S I P 串行 口, 个两 线 (。 串行接 口 , 个 8 1 I C) 一 通道 1 O位具有 可选 增益 差分 输入 的 A/ D转 换 器 , 1
基于AT90CAN128的CAN总线的分采集器设计
hu d t r d a i mi iy, a i ton, ii l y a a mos v sbii nd t t phe i e s r e c rc pr s u e t .The t o n, he c mm u c ton wih t e nia i t h ma n i
关键 词 : 9C AT 0 AN1 8 C 2 ; AN 总 线 ; 采 集 器 分
中 图分类 号 : 4 4 P 1
文献标 识 码 : A
文 章编 号 :0 60 9 2 1 ) 10 8 —4 1 0 —0 X( 0 10 —0 20
De i n o u — o lc o t s g f s b c le t r wih CAN u a e n AT9 CAN1 8 b sb s d o 0 2
分 采集 器 。
统 的容量 大 ; 有 较 强 的 自校 和 自诊 断 功 能 。而 具
பைடு நூலகம்
目前 国内大都 采用 进 口产 品 。虽 有部 分 系统投 入
试运 行 , 但还 未能 有效 形成 模块 化设 计 、 可灵 活组 态 的数据 采集 器 。 从 发展方 向上 看 , 国外数 据采 集 系 统 的数 据
收 稿 日期 : 0 0 1 — 7 2 1 — 02 .
1 数 据分 采 集器 硬 件 电路设 计
第 1期
21 0 1年 3月
气 象 水 文 海 洋 仪 器
M e e r l ia , yd o o iala a i ns r e t t o oog c l H r l g c nd M rne I tum n s
NO 1 . Ma. O l r 2 1
基 于 AT9 C O AN1 8的 C 2 AN 总线 的分 采 集 器 设 计
基于AT90CAN128的CAN总线节点设计与研究
基于AT90CAN128的CAN总线节点设计与研究作者:金树军来源:《现代电子技术》2014年第09期摘要: CAN总线在汽车电子、楼宇控制及其他工业控制领域中得到了广泛应用,AVR型单片机在仪表、工业控制领域也得到了广泛应用。
主要介绍AVR型单片机AT90CAN128在CAN总线节点中的实现方案及具体技术路线,给出增强型CAN总线节点电路原理图、主要程序设计方案,为开发人员快速应用提供必要的技术基础。
关键词: CAN总线节点;单片机;程序设计;工业控制中图分类号: TN911.7⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)09⁃0093⁃040 引言CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。
在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
CAN总线目前已经在车辆、船舶等运输业中;嵌入式机器控制、工厂自动化、过程自动化和发电等制造业中;电梯控制、嵌入式门控制、供暖控制、通风控制、空调控制等楼宇自动化中;医疗设备、重病监护等卫生保健中;分拣机、输送机、加油站、自动取款机等行业中;舞台控制、照明控制等娱乐行业中;煤矿安全监控系统等工业通信中得到广泛应用。
AVR单片机做为一款单周期指令的单片机,具有简单易学、费用低廉、功能强大等优点。
目前已用于军事、工业、家用电器、智能玩具、便携式智能仪表和机器人制作等领域。
广泛用于空调控制板、打印机控制板、智能电表、智能手电筒、LED控制屏、医疗设备、GPS等领域或设备。
AT90CAN128作为AVR单片机系列之一,不仅拥有AVR单片机本身的功能和资源,更兼具了CAN控制器功能。
基于AT90CAN128的CAN总线的分采集器设计
第1期 气象水文海洋仪器No.12011年3月M eteor olog ical,Hy drolog ical and M arine InstrumentsM ar.2011收稿日期:2010 10 27.作者简介:黄兆富(1981),男,硕士研究生.研究方向:信号与信息处理.基于AT 90CA N128的CAN 总线的分采集器设计黄兆富1,马尚昌1,2(1.成都信息工程学院,成都610225;2.中国气象局大气探测重点实验室,成都610225)摘 要:在以Atm el 公司AVR 系列新型微控制器AT90CAN128为核心的基础上开发了用于气象业务的数据采集系统,该系统主要对雨量、风向、风速、温湿度、辐射、能见度以及气压等气候物理量进行测量,并通过CA N 总线实现与主采集器的通信。
关键词:AT 90CAN128;CAN 总线;分采集器中图分类号:P414 文献标识码:A 文章编号:1006 009X(2011)01 0082 04Design of sub collector with CAN bus based on AT90CAN128H uang Zhaofu 1,Ma Shangchang 1,2(1.Chengd u Univers ity of I nf or mation Science &T echnology ,Chengd u 610225;2.K ey Labor ator y of A tmosp heric Sounding of CM A ,Chengdu 610225)Abstract:The w eather data acquisitio n system is designed based on the AT 90CAN128as micro controller,a new style AVR single chip,w hich is produced by Atm el cor poration.This sy stem mainly measures the w eather data,such as precipitatio n,w ind speed,w ind directio n,temper ature,humidity,radiatio n,visibility and atmo spheric pressure etc.Then,the com munication w ith the m ain collector is achieved by using CAN bus.Key words:AT90CAN 128;CAN bus;sub collector0 引言随着气象事业的快速发展,人们对于信息的需求无论从量上还是质上都在日益提高。
基于AT90CAN128单片机的高炉烧结配料系统设计CAN总线通信部分毕业设计
随着计算机网络技术和芯片技术的发展,控制芯片的性能大幅度提高,成本不断减低,网络几乎深入到我们生活的每一个角落,以现场总线为代表的控制网络也在工业以及其他控制系统中扮演着不可缺少的角色。
自从20世纪90年代以来,自动控制系统已经开始从集散控制系统(DCS)向现场总线控制系统(FCS)过渡。
在21世纪,现场总线控制系统将会成为控制领域的主流。
CAN总线由于具有可靠性高、成本低、容易实现等优点,在现场总线的实际工程应用中占据了较大的份额;汽车电子在我国正方兴未艾,作为其主要组成部分的CAN总线也得到了广泛的使用,并且CAN在工业控制、小区智能监控等热点领域有着广泛的应用前景;使得CAN总线成为教学和科研方面极好的范例和基础课程课题。
关键词:控制芯片;现场总线;自动控制系统;CAN总线Sintering blast furnace system based on AT90CAN128 single-chip microcomputer——CAN Bus CommunicationWith the development of computer network technology and chip technology, the Controller chip has been significantly improved in the performance, continually Reduced in costs. Network almost has gone deep into every corner of our lives, and control network represented by a field bus is also playing an important role in the industrial and other control systems. Since the 90's of 20th century, automatic control system has changed from the distributed control system (DCS) to the field bus control system (FCS). In the 21st century, field bus control system will become the mainstream of control area.CAN bus with the advantages of high reliability, low cost, easy availability holds a larger share in field bus of the actual engineering application. As motor electronic is still flourishing, the CAN bus as part of its main components has been used widely. And CAN in hot fields such as industrial control, intelligent monitoring of housing estate has a wide range of applications. And all these have made CAN bus making an excellent example and infrastructure issues in teaching and scientific research programs.Key words: Controller chip; field bus; Automatic Control System; CAN bus目录摘要 (I)Abstract (II)第一章引言 (1)1.1 研究背景 (1)1.2现场总线概述 (2)1.2.1 现场总线的现状 (2)1.2.2 主流现场总线简介 (3)1.2.3 CAN总线的简介 (6)1.2.4 CAN总线与其他通信方式的比较 (7)第二章烧结配料系统设计 (8)2.1 高炉控制系统 (8)2.2系统工作流程图 (8)2.3 系统工作方式 (9)2.4 系统各部分功能 (10)2.4.1 操作站的功能 (10)2.4.2 称重皮带秤及控制仪表功能 (10)2.4.3 计算机监控部分 (11)2.4.4 变频控制部分 (12)2.4.5 现场操作箱 (12)2.5 系统的过程控制实现 (12)第三章CAN总线的概述 (14)3.1 CAN总线的概念 (14)3.1.1 CAN总线的结构 (14)3.1.2 CAN总线网络结构 (15)3.1.3 CAN总线的主要特点 (15)3.1.4 CAN总线的位数值表示 (16)3.1.5 CAN总线的通信距离 (16)3.2 CAN总线的分层结构 (16)3.3 CAN报文的帧结构 (17)3.3.1 CAN报文的帧类型 (17)3.3.2 CAN报文的帧格式 (20)3.4 CAN总线的扩展应用及其协议介绍 (22)3.4.1 概述 (22)3.4.2 DeviceNet (23)3.4.3 CANOpen (24)3.4.4 CAN总线协议的内容 (25)3.5 CAN软件设计基础 (25)3.5.1 CAN总线系统的节点 (25)3.5.2 报文发送 (27)3.5.3 报文接收 (28)第四章CAN通信应用层协议设计 (29)4.1 配料控制器的协议 (29)4.1.1 配料控制器发送的信息 (29)4.1.2 配料控制器接收的信息 (31)4.2 主控制器的协议 (32)4.2.1 主控制器发送的信息 (32)4.2.2主控制器接收的信息 (33)4.3 小结 (35)总结 (36)参考文献 (37)附录A (38)附录B (41)致谢 (44)第一章引言1.1 研究背景控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
基于AT90CAN128的步进电机控制驱动系统

1.引言步进电机是一种将电脉冲转化为角位移的执行机构,即当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步钜角)。
步进电机通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
由于步进电机具有控制方便、体积小等特点,所以在智能仪表和位置控制中得到了广泛的应用。
随着近年来大规模集成电路的发展以及各种单片机的迅速发展和普及,为设计功能很强而且价格低的步进电机控制驱动器提供了先进的技术和充足的货源。
用AVR单片机可以用很低的成本实现较复杂的控制方案。
所以,采用AVR单片机的步进电机控制系统在控制精度和抗干扰方面比51单片机控制系统有着显著的优势。
2.硬件组成与工作原理步进电机控制驱动系统由单片机、驱动电路、步进电机等组成。
本文所设计的步进电机控制驱动系统的框图如图1:图1本文设计的步进电机控制驱动框图本控制系统采用Atmel公司AVR系列单片机AT90CAN128作为处理器。
系统所用的电机为86BYG450A-02型混合式步进电机,其工作电压是直流5V,AT90CAN128单片机配以时钟电路、“看门狗”复位电路等。
驱动电路采用专用芯片L297和L298以及外围分立元器件组成。
单片机产生脉冲信号按照步进电机的励磁顺序进行信号分配,信号经过驱动电路功率放大后,再与步进电机相应励磁线圈的引脚相连,即可驱动步进电机。
AVR单片机内部有128K字节的系统可编程Flash4K字节的EEP-ROM,通过JTAG接口实现对Flash,EEPROM,熔丝位和锁定位编程。
两个具有独立的预分频器和比较器功能的8位定时器/计数器,两个有预分频功能,比较功能和捕捉功能的16位定时器/计数器。
两路8位pwm,6路分辨率可编程(2—16)位的pwm。
CAN控制器2.0A和2.0B具有传输、接收、自动回复和帧缓冲接收模式,1Mbits/s的最大传输率为8MHz。
AT90CAN128中文资料
特点•高性能,低功耗的AVR ® 8位微控制器•先进的RISC结构- 133 - 最强大的单时钟周期指令执行- 32个8位通用工作寄存器+外设控制寄存器- 全静态工作- 高达16 MIPS的吞吐量为16兆赫- 片2周期乘法器•非挥发性程序和数据存储器- 在系统内32K/64K/128K字节可重编程闪存(AT90CAN32/64/128)•耐久性:10,000写入/擦除周期- 可选启动代码段与独立锁定位•可选启动大小:1K字节,2K字节,4K字节或8K字节•在系统编程的片上引导程序(CAN总线,UART 的,...)•真正的了解,同时,写操作- 1K/2K/4K字节的EEPROM(耐力:100,000写入/擦除周期)(AT90CAN32/64/128)- 2K/4K/4K字节内部SRAM(AT90CAN32/64/128)- 高达64K字节可选外部存储空间- 编程软件安全锁•JTAG接口(IEEE标准。
1149.1兼容)接口- 边界扫描功能根据JTAG标准- 编程闪存(硬件的ISP)的EEPROM,熔丝位和锁定- 广泛的片上调试支持•CAN控制器的电流及2.0B - 的ISO 16845认证(1)- 15个具有独立完整的邮件对象标识标签和面具- 发送,接收,自动回复和帧缓冲区接收模式- 1Mbits / s的8 MHz的最大传输速率- 冲压时,公车及听力模式(间谍或自动波特)•外设特点- 可编程看门狗定时器,带有片上振荡器- 8位同步Timer/Counter-0•10位预分频器•外部事件计数器•输出比较或8位PWM输出- 8位异步Timer/Counter-2•10位预分频器•外部事件计数器•输出比较或8位PWM输出•32kHz振荡器实时时钟运行- 双通道16位同步Timer/Counters-1&3•10位预分频器•输入捕获噪声抵消•外部事件计数器•3输出比较或16位PWM输出•输出比较调制- 8通道,10位SAR ADC•8个单端通道•7个差分通道•2个差分通道,再加上1倍,10倍,或200x中可编程增益- 片内模拟比较器- 字节为导向的两线串行接口- 双可编程串行的USART- 主/从SPI串行接口•编程闪存(硬件的ISP)•特殊的处理器特点- 上电复位和可编程欠压检测- 内部RC振荡器校准- 8个外部中断源- 5睡眠模式:空闲,ADC噪声降低,电力保存,掉电和待机- 软件可选的时钟频率- 全球拉禁用•I / O和软件包- 53可编程I / O口线- 64引脚TQFP和64引脚QFN封装•工作电压:2.7 - 5.5V的•工作温度:工业(-40 ° C至+85℃)•最大工作频率:在2.7V 8兆赫,16兆赫在4.5V 注:1。
AT90CAN128的双机热备结构继电器驱动系统设计
关 键 词 :双 机 热 备 ; AT9 0 CAN1 2 8; 驱 动 系统 ; 安全型继电 器; 可 靠 性
中 图分 类 号 :TP 2 0 2 文 献 标 识 码 :A
..
路 运 输 自动 控 制 、 远 程 控 制 信 号 设 备 正 常 使 用 的 必 要 条
一L_
件 ] 。 因此 , 对 于 在 铁 路 等 重 要 场 合 使 用 的 安 全 型 继 电
器, 需 要 采 用 高 可 靠 性 的 驱 动 电路 系 统 。本 文 利 用 AVR
Des i gn o f Rel ay Dr i v er Sy s t e m wi t h Tw o — s h i pp er Ho t Sp ar e Ba s e d o n AT9 0 CAN 1 2 8
Ruan R uo l i n
。 . 。
簟
曩 嘲 薯 曩
的双 机 热 备结构 继 电器驱 动 系统 设计
阮 若 琳
( 兰州 交 通 大学 光 电技 术 与 智 能 控 制 教 育 部 重 点 实 验 室 , 兰州 7 3 0 0 7 0 )
摘 要 :提 出 了一 种 高 可 靠 性 单 片 机 控 制 的 安 全 型 继 电 器 驱 动 系统 , 采 用 第 三 方监 测 下 的 双 机 热备 结 构 。通 过 对 双 机 热 备 冗余 结 构 的 分 析 , 比 较 了此 结 构 下 的 两种 工 作 模 式 的 可 靠 性 。 系统 硬 件 采 用 3片 AT9 0 CAN1 2 8单 片 机 作 : 勾控 制 核
CAN128试验说明书
AT90CAN128处理器主控单元说明书一、前言AT90CAN128是一款低功率CMOS 8位的微处理器,它是基于A VR增强型RISC结构的。
在一个时钟周期里执行强大功效的指令,AT90CAN128可完成1 MIP 每MHz的吞吐量,从而让系统设计者可对进程速度进行优化功率消耗。
A VR内核结合了一个丰富的指令设置,有32个通用目标工作寄存器。
所有32个寄存器都直接和运算器连接,两个独立的寄存器允许被在一个时钟周期里执行的一条单个指令访问。
这种结构比常规的微处理器更具有效率。
AT90CAN128有以下特点:128K的内部可编程FLASH,具有可读写能力,4K 的EEPROM,4K的SRAM,53个通用目标I/O接口,32个通用目标工作寄存器,一个CAN控制器,实时时钟(RTC),四个灵活的定时/计数器,具有比较输出模式和PWM,两个USART,一位定向两线串行接口,一个8通道10位的ADC,一个可编程的带有内部震荡器的看门狗计时器,一个SPI串口,JTAG测试接口,也可用于访问片上调试系统和五个软件选择的省电模式。
空闲模式会关闭CPU,但允许SRAM,定时/计数器,SPI/CAN口和中断系统继续工作。
掉电模式保存寄存器内容,但停止震荡器,禁止所有其他片上功能直到下一个中断或者硬件复位。
省电模式中,异步计时器继续运行,当其他的器件处于休眠时允许用户保留一个计时器。
ADC噪声消除模式关闭CPU和所有的I/O接口模块(但除了异步计时器和ADC),以此在ADC转换期间使噪声最小化。
在备用模式中,晶体振荡器运行当其他器件都休眠。
器件运用Atmel公司的高密度非易失的存储技术制造。
片上ISP FLASH允许程序存储器被一个常规的非易失的储存编程器或者一个在A VR内核上运行的片上启动程序,通过一个内部SPI串行接口来重新编程。
启动程序能用于任何接口在应用FLASH储存器里来下载应用程序。
当应用FLASH部分被更新时,在启动FLASH 部分内的软件将继续运行,提供真正的读写操作。
基于AT90CAN128的车用CAN网络节点的研究与实现
Abstrac t: The deve lopm ent of CAN node, using a kind o f new contro ller) ) ) AT90CAN 128 by A tm el is introduced. T he ha rdw are design and the driver developm ent are also introduced in deta i.l Based on K C-6 DF STN2000 exper im ent p latform in our labo rato ry, steady data transm iss ion and rea l tim e con tro l am ong CAN nodes a re rea lized. T h is design prov ides a m ore e fficien t and integrated hardwa re platform fo r som e high level CAN pro tocol such as CAN open. K ey word s: CAN; veh icle e lectronic dev ices; AT 90CAN 128
( 1. Inst itute of V eh icle Eng ineering, B eijing U n ivers ity of S cien ce and Technology, B eijing 100083, Ch ina; 2. A u tom at ion Schoo,l Beijing U n iversity of Posts and Telecommun ications, B eijing 100876, Ch ina; 3. H ebei U n ivers ity of S cien ce and Technology, Sh ij iazhuang 050018, Ch ina; )
基于AT90CAN128的CAN总线设计
基于AT90CAN128的CAN总线设计
1 前言
现场总线是当前工业总线领域中最活跃的一个领域,CAN 总线是工业数据总线领域重要的现场总线之一。
CAN 是Contro ller Area N etw ork 的缩写,是国际标准化的串行通信协议。
在当今的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为减少线束的数量、通过多个LAN 进行大量数据的高速通信,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。
而今CAN 在欧洲已是汽车网络的标准协议。
CAN 的初衷是为了解决汽车里多种复杂数据的通信,后来证实在很多工业领域也能应用自如。
2 CAN 总线特性及当今状况
CAN 总线与其他通讯网络的不同之处在于: 报文传送中不包括目标地址,以全网广播为基础,各接收站根据报文中反映数据性质的标识符过滤报文;强化了对数据安全性的关注,满足控制系统较高的数据需求。
它具有如下显着特征: 极高的总线利用率、低成本、高速的数据传输速率、远距离传输、可靠的错误处理和检错机制、可根据报文的ID 决定接收或屏蔽该报文,节点在错误严重的情况下具有自动退出总线的功能等等。
CAN 总线所需完善的通信协议可由CAN 控制器芯片和接口芯片实现,大大降低了系统的开发难度、组成成本、缩短了开发周期,其高性能高可靠性以及灵活的设计受到人们的重视,应用也越来越广泛。
目前比较流行的控制器芯片是飞利浦公司的SJA1000 和收发器芯片TJA1050。
基于AT90CAN128的CAN总线节点的实现方案
基于AT90CAN128的CAN总线节点的实现方案摘要现场总线在控制领域得到广泛应用,CAN总线广泛应用于工业控制系统和汽车控制系统。
本文对用内嵌CAN总线控制器的A VR单片机控制器AT90CAN128构建CAN节点的方案进行了探索。
关键词CAN总线;A VR单片机;AT90CAN128;CAN总线节点实现方案0 引言随着微型计算机、嵌入式系统、网络技术、传感与检测技术的发展,现场总线在控制领域得到广泛应用。
德国Bosch公司推出CAN (Controller Area Network)现场总线是的一种是国际标准化的串行通信协议。
一般用主CPU 外接一个专用CAN 控制器以实现。
广泛应用在汽车控制系统与工业领域。
A VR 单片机是由ATMEL公司利用Flash新技术研发的RISC精简指令集的高速8位单片机。
高速、低耗、功能强大。
AT90CAN128s是内置CAN 总线控制器的A VR 单片机。
本文介绍AT90CAN128实现CAN节点的方法。
1 集成CAN 控制器的AT90CAN128AT90CAN128是ATMEL公司利用Flash新技术生产的一种基于RISC结构的8位A VR增强型单片机。
资源丰富,功能强大。
除拥有一般A VR处理器的基本接口模块外,还集成CAN 控制器。
与CAN标准帧完全2.0兼容。
为搭建基于CAN 通信的系统提供了便利。
2 硬件设计一个CAN总线由模块控制器、CAN控制器、CAN收发器3个部分组成。
本方案节点电路主要由A VR单片机AT90CAN128和高速CAN总线收发器构成,如图1所示。
AT90CAN128是为总线节点的模块控制器和CAN控制器,采用16MHz时钟,负责上层应用与系统控制,执行完整的CAN协议总线,实现总线数据的发送与接收通信。
CA82C251为专用总线收发处理器,具有瞬间抗干扰能力和保护总线能力,主要实现逻辑电平的控制和接口电气特性的处理。
图1AT90CAN128CAN总线节点结构图3 软件设计依据模块控制器AT90CAN128内部结构与特点,本方案软件选用A VR单片机专用编程环境,用C语言进行设计,按模块化的设计方法。
基于AT90CAN128的开关量控制单元设计

基于AT90CAN128的开关量控制单元设计CAN(Controller Area NetWork)技术是一种有效支持分布式控制和实时控制的串行通信网络,广泛应用于工业控制。
其硬件衔接容易,牢靠性好,实时性和性价比高,能够很好地满足计算机联锁系统通信网络对实时性和牢靠性的要求。
是由公司研发的增加型内置Flash的RISC高速8位单片机。
本设计用法的是AVR系列新型单片机AT90CAN128,它自带CAN控制器,使得通信部分的硬件设计大大简化,因此增加了系统牢靠性。
1 技术简介CAN总线是德国Bosch公司20世纪80年月初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议。
它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1 Mbps。
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等工作。
CAN总线具有以下技术特性:①废除了传统的站地址编码,改为对通信数据块举行编码。
采纳这种办法的优点是,可使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,因此可以定义211或229个不同的数据块;这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中十分实用。
②数据段长度最多为8个字节,可满足通常工业领域中控制指令、工作状态及测试数据的普通要求。
同时,8个字节不会占用总线时光过长,从而保证了通信的实时性。
CAN协议采纳CRC校验并可提供相应的错误处理功能,保证了数据通信的牢靠性。
③CAN采纳非破坏总线仲裁技术。
当多个节点同时向总线发送信息浮现矛盾时,优先级较低的节点会主动退动身送,而优先级最高的节点可不受影响地继续传输数据,从而大大节约了总线矛盾仲裁时光。
即使在网络负载很重的状况下,也不会浮现网络瘫痪的状况。
AT90CAN128的CAN编程1
这几天一直在忙活AT90CAN128的CAN编程,几天终于有眉目了。
其实他的can用起来不复杂,只是一开始没有仔细看手册,走了不少弯路。
编译器ICCAVR4M晶振50K波特率void can_init(void){// CAN Controller initialization// CAN Controller initialization// CAN System Clock: 400.0 kHzCANBT1=0x12;// Propagation Time Segement: 7.500 us// Re-Sync Jump Width: 2.500 usCANBT2=0x04;// Sample Point(s): 3// Phase Segment 1: 5.000 us// Phase Segment 2: 5.000 usCANBT3=0x13;// CAN Timer Clock Period: 2.000 usCANTCON=0x00;//--------------can_MOB INITIAL-------------------//MOB0=RXCANPAGE = 0x00;//MOB0,自动增量,初值为0CANSTMOB = 0;CANCDMOB = 0x80; // RX//can2a,DLC=8CANIDT4 = 0x00;//CANIDT3 = 0x00;//CANIDT2 = 0x00;//CANIDT1 = 0x00;//CANIDM4 = 0x00;// 11111 100 CANIDM3 = 0x00;// 11111 111 CANIDM2 = 0x00;// 11111 111 CANIDM1 = 0x00;//CANIDM4-1数据校验屏蔽寄存器00000 111 //MOB1=TXCANPAGE = 0x10;CANSTMOB = (1<<6); //txokCANCDMOB = 0x08;CANIDT4 = 0x00;//CANIDT3 = 0x00;//CANIDT2 = 0xe0;//CANIDT1 = 0x00;//CANIDM4 = 0x00;// 11111 100 CANIDM3 = 0x00;// 11111 111 CANIDM2 = 0x00;// 11111 111 CANIDM1 = 0x00;//CANIDM4-1数据校验屏蔽寄存器00000 111 // CAN Interrupts:// Timer Overrun: Off// General Errors: Off// Frame Buffer: Off// MOb Errors: Off// Transmit: Off// Receive: Off// Bus Off: Off// All, except Timer Overrun: OnCANGIE=0xf0;// MOb0: Enabled, MOb1: Enabled, MOb2: Disabled, MOb3: Disabled, MOb4: Disabled, MOb5: Disabled, MOb6: Disabled, MOb7: DisabledCANEN2=0xff;// MOb8: Disabled, MOb9: Disabled, MOb10: Disabled, MOb11: Disabled, MOb12: Disabled, MOb13: Disabled, MOb14: DisabledCANEN1=0xff;// MOb0..7 Interrupts: MOb0: On, MOb1: On, MOb2: Off, MOb3: Off, MOb4: Off, MOb5: Off, MOb6: Off, MOb7: OffCANIE2=0x03;// MOb8..14 Interrupts: MOb8: Off, MOb9: Off, MOb10: Off, MOb11: Off, MOb12: Off, MOb13: Off, MOb14: OffCANIE1=0x00;// Highest Interrupt Priority: MOb0CANHPMOB=0x00;CANGCON |= 0x02; //CAN控制器启动}// CAN interrupt service routine#pragma interrupt_handler can_isr:19void can_isr(void){// Place your code hereunsigned char i, flag;CANGIE &= ~(1<<ENRX); //关接收中断****LED_RUN(ON);flag = CANSIT2;//-----------------------------------------------------if (flag & (1<<0)){CANPAGE = 0<<4;for(i = 0; i < 8; i++){data_buf[i]=CANMSG; //取得8个字节的数据}CANPAGE = 0<<4;CANSTMOB &= ~(1<<RXOK); //清中断标志****CANCDMOB = 0x80; //接收使能}if (flag & (1<<1)){CANPAGE = 1<<4;CANSTMOB &= ~(1<<TXOK); //清中断标志**** }//------------------------------------------------------LED_RUN(OFF);CANGIE |=(1<<ENRX);}void can_send (unsigned char n){unsigned char i;CANGIE &= ~(1<<ENRX);CANPAGE = (n<<4); //MOB_n, auto increment, index 0if (CANSTMOB & (1<<TXOK)){CANSTMOB &= ~(1<<TXOK);for(i = 0; i < 8; i++){CANMSG = data_buf[i];}CANCDMOB = 0x48;}CANGIE |=(1<<ENRX);}。
基于CAN总线的烧结配料监控系统设计
基于CAN总线的烧结配料监控系统设计
江杰;张书博
【期刊名称】《自动化技术与应用》
【年(卷),期】2013(032)007
【摘要】本文介绍了一种基于CAN总线的烧结配料监控系统的设计.采用CAN总线实现通信,使用Labview软件实现上位机监控,系统能够实现配料过程的实时监测和远程控制现场设备,实现了分布式控制和集中管理.该系统各个控制器使用
STM32单片机为控制核心,该单片机功能强、体积小、价格便宜,而且支持软件很多,在智能仪表中应用十分广泛.
【总页数】5页(P14-17,51)
【作者】江杰;张书博
【作者单位】内蒙古科技大学,内蒙古包头 014010;内蒙古科技大学,内蒙古包头014010
【正文语种】中文
【中图分类】TP336
【相关文献】
1.基于CAN总线的烧结配料监控系统 [J], 默少丽;赵凤鸣
2.基于智能配料的烧结配料精度改善措施研究 [J], 李丽
3.基于DDE技术的自动配料监控系统设计 [J], 陆建华
4.基于CAN总线的自动烧结配料系统 [J], 张兄华; 马昭
5.基于智能配料的烧结配料精度改善措施研究 [J], 李丽
因版权原因,仅展示原文概要,查看原文内容请购买。
基于AT90CAN128的多功能通讯转换器的研制与应用的开题报告

基于AT90CAN128的多功能通讯转换器的研制与应用的开题报告1. 研究背景现在,随着工业自动化、智能化的不断发展,各种不同的通信协议得到了广泛的应用,例如CAN、Modbus、Ethernet等,这些协议虽然各有特点,但是它们之间的互通性较差。
在实际的应用中,常常需要将不同的协议之间进行转换,这需要使用通讯转换器来实现。
通讯转换器通常包含了一个或多个硬件接口用于不同协议的连接,同时还包含相应的转换逻辑,可以实现不同协议之间的转换。
通讯转换器的开发和应用对于实现不同协议之间的无缝连接具有重要的意义。
2. 研究内容本研究将以AT90CAN128为核心,设计一种基于硬件的多功能通讯转换器,它具有以下特点:(1)支持多种通信协议,包括CAN、Modbus、Ethernet等;(2)采用32位ARM Cortex-M3内核设计,实现高效的数据处理;(3)具有扩展性和可升级性,可以随时增加新的通信协议和接口;(4)具有高度的稳定性和可靠性,可以满足工业环境的使用需求。
研究包括以下方面:(1)AT90CAN128的硬件设计,包括选型、电路原理图设计、PCB 设计等;(2)软件设计,包括驱动程序开发、通讯协议转换逻辑设计等;(3)实验验证,包括对通讯转换器进行功能测试、性能测试和可靠性测试等。
3. 研究意义本研究将研制一种性能稳定、功能强大的通讯转换器,可以在不同的工业环境中应用,满足不同的应用场景需求。
它可以帮助用户降低系统集成成本,提高系统的兼容性和可扩展性,推动工业自动化和智能化的不断发展。
4. 研究方法本研究采用了以下研究方法:(1)文献研究法:通过查阅相关文献,了解通讯转换器的设计原理和通讯协议的特点;(2)硬件设计法:采用AT90CAN128为核心,进行电路原理图设计、PCB设计等工作;(3)软件设计法:开发相应的驱动程序、通讯协议转换逻辑等;(4)实验研究法:进行功能测试、性能测试和可靠性测试等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
3.附件包括:任务书、开题报告、外文译文、译文原文(复印件)。
4.文字、图表要求:1)文字通顺,语言流畅,书写字迹工整,打印字体及大小符合要求,无错别字,不准请他人代写2)工程设计类题目的图纸,要求部分用尺规绘制,部分用计算机绘制,所有图纸应符合国家技术标准规范。
图表整洁,布局合理,文字注释必须使用工程字书写,不准用徒手画3)毕业论文须用A4单面打印,论文50页以上的双面打印4)图表应绘制于无格子的页面上5)软件工程类课题应有程序清单,并提供电子文档5.装订顺序1)设计(论文)2)附件:按照任务书、开题报告、外文译文、译文原文(复印件)次序装订3)其它基于AT90CAN128单片机的高炉烧结配料系统设计——CAN总线通信部分摘要随着计算机网络技术和芯片技术的发展,控制芯片的性能大幅度提高,成本不断减低,网络几乎深入到我们生活的每一个角落,以现场总线为代表的控制网络也在工业以及其他控制系统中扮演着不可缺少的角色。
自从20世纪90年代以来,自动控制系统已经开始从集散控制系统(DCS)向现场总线控制系统(FCS)过渡。
在21世纪,现场总线控制系统将会成为控制领域的主流。
CAN总线由于具有可靠性高、成本低、容易实现等优点,在现场总线的实际工程应用中占据了较大的份额;汽车电子在我国正方兴未艾,作为其主要组成部分的CAN总线也得到了广泛的使用,并且CAN在工业控制、小区智能监控等热点领域有着广泛的应用前景;使得CAN总线成为教学和科研方面极好的范例和基础课程课题。
关键词:控制芯片;现场总线;自动控制系统;CAN总线Sintering blast furnace system based on AT90CAN128 single-chip microcomputer——CAN Bus CommunicationAbstractWith the development of computer network technology and chip technology, the Controller chip has been significantly improved in the performance, continually Reduced in costs. Network almost has gone deep into every corner of our lives, and control network represented by a field bus is also playing an important role in the industrial and other control systems. Since the 90's of 20th century, automatic control system has changed from the distributed control system (DCS) to the field bus control system (FCS). In the 21st century, field bus control system will become the mainstream of control area.CAN bus with the advantages of high reliability, low cost, easy availability holds a larger share in field bus of the actual engineering application. As motor electronic is still flourishing, the CAN bus as part of its main components has been used widely. And CAN in hot fields such as industrialcontrol, intelligent monitoring of housing estate has a wide range of applications. And all these have made CAN bus making an excellent example and infrastructure issues in teaching and scientific research programs.Key words: Controller chip; field bus; Automatic Control System; CAN bus目录摘要 (V)Abstract (VI)第一章引言 (1)1.1 研究背景 (1)1.2现场总线概述 (2)1.2.1 现场总线的现状 (2)1.2.2 主流现场总线简介 (4)1.2.3 CAN总线的简介 (7)1.2.4 CAN总线与其他通信方式的比较 (8)第二章烧结配料系统设计 (9)2.1 高炉控制系统 (9)2.2系统工作流程图 (10)2.3 系统工作方式 (11)2.4 系统各部分功能 (12)2.4.1 操作站的功能 (12)2.4.2 称重皮带秤及控制仪表功能 (12)2.4.3 计算机监控部分 (13)2.4.4 变频控制部分 (15)2.4.5 现场操作箱 (15)2.5 系统的过程控制实现 (15)第三章CAN总线的概述 (17)3.1 CAN总线的概念 (17)3.1.1 CAN总线的结构 (17)3.1.2 CAN总线网络结构 (18)3.1.3 CAN总线的主要特点 (18)3.1.4 CAN总线的位数值表示 (19)3.1.5 CAN总线的通信距离 (19)3.2 CAN总线的分层结构 (20)3.3 CAN报文的帧结构 (21)3.3.1 CAN报文的帧类型 (21)3.3.2 CAN报文的帧格式 (25)3.4 CAN总线的扩展应用及其协议介绍 (27)3.4.1 概述 (27)3.4.2 DeviceNet (27)3.4.3 CANOpen (29)3.4.4 CAN总线协议的内容 (30)3.5 CAN软件设计基础 (31)3.5.1 CAN总线系统的节点 (31)3.5.2 报文发送 (32)3.5.3 报文接收 (33)第四章CAN通信应用层协议设计 (35)4.1 配料控制器的协议 (35)4.1.1 配料控制器发送的信息 (35)4.1.2 配料控制器接收的信息 (37)4.2 主控制器的协议 (39)4.2.1 主控制器发送的信息 (40)4.2.2主控制器接收的信息 (41)4.3 小结 (43)总结 (44)参考文献 (45)附录A (47)附录B (52)致谢 (56)第一章引言1.1 研究背景控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
控制器局部网将在我国迅速普及推广。
随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。
由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。
这类系统是以微型机为核心,将5C技术--COMPUTER(计算机技术)、CONTROL(自动控制技术)、COMMUNICATION(通信技术)、CRT(显示技术)和CHANGE(转换技术)紧密结合的产物。
它在适应范围、可扩展性、可维护性以及抗故障能力等方面,较之分散型仪表控制系统和集中型计算机控制系统都具有明显的优越性。
典型的分散式控制系统由现场设备、接口与计算设备以及通信设备组成。
现场总线(FIELDBUS)能同时满足过程控制和制造业自动化的需要,因而现场总线已成为工业数据总线领域中最为活跃的一个领域。
现场总线的研究与应用已成为工业数据总线领域的热点。
尽管目前对现场总线的研究尚未能提出一个完善的标准,但现场总线的高性能价格比将吸引众多工业控制系统采用。
同时,正由于现场总线的标准尚未统一,也使得现场总线的应用得以不拘一格地发挥,并将为现场总线的完善提供更加丰富的依据。