电梯安全钳提拉机构的计算
电梯安全钳制动距离

电梯安全钳制动距离
电梯作为现代化建筑中必不可少的垂直交通设备,为住宅和公共建筑
的出入口提供便利,但电梯的使用也存在安全隐患。
钳制动作为电梯
安全装置之一,其距离直接关系到电梯的安全性和使用效果。
本文将
从电梯安全钳制动的原理和距离方面进行分析和阐述。
钳制动是电梯安全保护装置之一,主要起到当电梯超速或者受到外力
冲击时,能够自动刹车,保证乘客的安全。
钳制动是由制动器、滚轮、减速器和控制系统等组成的,这些部件之间密切协作,一旦出现故障,可能导致电梯失控、坠落等事故。
钳制动距离是指电梯在出现紧急停留信号时,制动器将减速器带动的
电机停止转动的距离。
通过对电梯的动力学分析可以得知,钳制动距
离与电梯的速度、载荷、轮轴摩擦力以及制动器的动作速度等因素有关。
一般来说,正常情况下的钳制动距离应该是电梯最大超速时的运
行距离,保证钳制动能够及时刹车,并且在刹车过程中不会产生触顶
或者失控等情况。
为了保证电梯的钳制动距离符合要求,需要通过定期维护和保养电梯
设备,确保各个部件的正常运行。
同时,电梯安全检测也应该是每年
进行一次,通过专业技术手段对电梯的各项指标进行检测和评估,发
现问题及时进行修复和升级。
总之,电梯安全钳制动距离是电梯安全的重要指标之一,合理的距离设置能够有效预防电梯事故的发生。
为了保障乘客的安全,应该加强电梯的维护和管理,确保钳制动距离处于正常状态,提高电梯的安全性和运行效率。
此外,作为使用电梯的消费者,我们也应该遵守电梯使用规范,确保自己和他人的安全,不轻信谣言和不当操作,如此才能让电梯真正成为我们生活中的舒适交通工具。
电梯安全钳动作受力分析及相关问题阐述

电梯安全钳动作受力分析及相关问题阐述作者:朱敏来源:《中国科技纵横》2016年第12期【摘要】电梯作为目前的重要运输工具,每一个组成部分都具有独特的作用。
安全钳是近几年比较关注的部件,其动作受力和失效情况,直接关系到电梯能否正常的运行,整体上产生的影响是非常广泛的。
当电梯出现失控时,安全钳可以及时的停止电梯下降,对内部人员、货物提供较高的安全保障。
文章针对安全钳受力展开分析,并且对失效情况进行探究。
【关键词】电梯安全钳受力分析失效随着经济的发展和社会建设水平的提升,电梯的普及程度不断提高,已经成为了所有建筑的必要工具。
从客观的角度来分析,电梯本身是一种精密的大型仪器,安全钳的作用是毋庸置疑的。
倘若安全钳的受力情况出现偏差,将有极大的可能引起失效事故,届时对电梯造成的破坏、对内部人员和货物造成的威胁,均是非常严重的。
因此,必须对电梯安全钳动作受力展开分析,了解如何应对失效事故。
1 电梯安全钳动作受力分析1.1 安全钳工作原理电梯作为一种重要的建筑内部运输工具,在很多方面都具有较大的积极作用。
为了能够加强电梯的稳定性,因此在设计安全钳的过程中,主要是通过限速器、安全钳、张紧轮以及其他的部件共同组成的。
分析电梯安全钳的工作原理为:在电梯运行过程中,如果电梯出现意外发生失控快速下降或当电梯下行速度过快(超过限速器设定的限制速度)时,这时限速器卡紧机构使限速轮停止转动,限速绳在摩擦力作用下带动安全钳动作,这时电梯轿厢仍继续下行,安全钳钳块相对于轿厢作向上运动,钳块提起并与导轨并紧,由于摩擦力的作用使电梯轿厢制停,从而避免电梯下坠引起安全事故。
1.2 安全钳动作受力分析电梯本身在运行过程中,需要承受来自于各个方面的“力”,为了加深对安全钳的动作受力分析,应结合具体情况来了解。
在电梯运行的过程中,安全钳与导轨之间存在力的作用,倘若其中夹杂了异物,安全钳将会受到“合力”的作用。
将安全钳受到拉杆的作用力设定为R,导轨运行过程中,其势必会与安全钳产生相应的摩擦力。
800kg1.0m电梯设计计算说明

b)层门型式、开门净尺寸宁波申菱中分式层门装置,开门净尺寸800*2100,附图如下:e)门板悬挂装置和导向装置简图轿门板悬挂装置厅门板悬挂装置866.2=0.082<[Y]=0.1823cm=8788N/cm2/96EJ(5Q1/8+Q2)大学毕业论文规范一、结构要求一份完整的本科生毕业论文档案袋内应包含两个部分内容:1、毕业论文装订册;2、毕业论文附件材料。
二、版面要求A4纸张,其中:页边距上3cm,下、左2.5cm,右2cm;页脚1.75cm;每册的封面与封底需用白色的铜版纸张(规格120g-150g)印制。
三、毕业论文装订册组成部分与要求(一)封面。
论文题目不得超过20个字,要简练、准确,可分为两行。
(二)内容。
1、毕业论文任务书。
任务书由指导教师填写,经系部审查签字后生效。
2、毕业论文开题报告;3、毕业论文学生申请答辩表与指导教师毕业论文评审表;4、毕业论文评阅人评审表;5、毕业论文答辩表;6、毕业论文答辩记录表;7、毕业论文成绩评定总表;8、学位论文原创性声明及版权使用授权书;9、中英文题目与作者;10、中英文内容摘要和关键词。
(1)摘要是论文内容的简要陈述,应尽量反映论文的主要信息,内容包括研究目的、方法、成果和结论,不含图表,不加注释,具有独立性和完整性。
中文摘要一般为200-400字左右,英文摘要应与中文摘要内容完全相同。
(2)关键词是反映毕业论文主题内容的名词,是供检索使用的。
主题词条应为通用技术词汇,不得自造关键词。
关键词一般为3-5个,按词条外延层次(学科目录分类),由高至低顺序排列。
关键词排在摘要正文部分下方。
11、目录;目录按三级标题编写,要求层次清晰,且要与正文标题一致。
主要包括绪论、正文主体、结论、致谢、主要参考文献及附录等。
12、正文。
论文正文部分包括:绪论(或前言、序言)、论文主体及结论。
(1)绪论。
综合评述前人工作,说明论文工作的选题目的和意义,国内外文献综述,以及论文所要研究的内容。
电梯参数计算公式
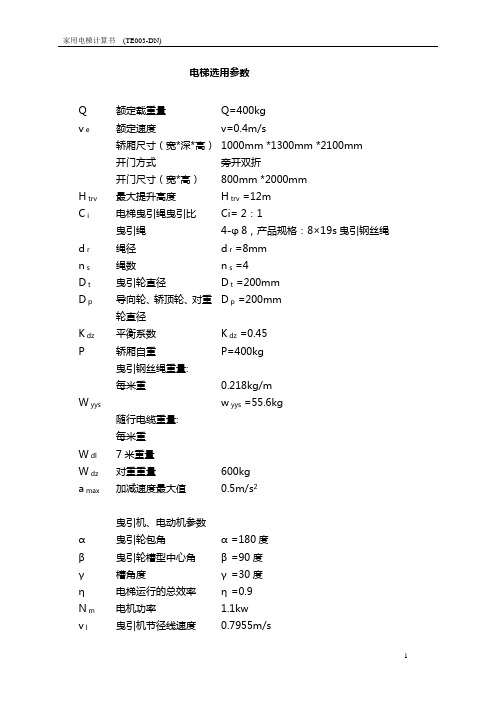
电梯选用参数Q 额定载重量Q=400kg v e额定速度v=0.4m/s轿厢尺寸(宽*深*高)开门方式开门尺寸(宽*高)1000mm *1300mm *2100mm 旁开双折800mm *2000mmH trv最大提升高度H trv =12m C i电梯曳引绳曳引比Ci= 2:1d r n s 曳引绳绳径绳数4-φ8,产品规格:8×19s曳引钢丝绳d r =8mmn s =4D t曳引轮直径D t =200mm D p导向轮、轿顶轮、对重轮直径D p =200mmK dz平衡系数K dz =0.45P 轿厢自重P=400kgW yys 曳引钢丝绳重量:每米重0.218kg/mw yys =55.6kgW dl 随行电缆重量: 每米重7米重量W dz对重重量600kga max加减速度最大值0.5m/s2曳引机、电动机参数α曳引轮包角α=180度β曳引轮槽型中心角β=90度γ槽角度γ=30度η电梯运行的总效率η=0.9N m电机功率 1.1kwv l曳引机节径线速度0.7955m/sn\m电机转速76 rpm轿厢导轨T75限速器动作速度0.536m/s<V动<0.64m/s安全钳瞬时式动作缓冲器聚氨酯,行程H=60mm一、电动机功率计算对于交流电梯而言,当平衡系数K dz≤0.5时,通常用下列公式计算,即能满足要求:N=(1- K dz)Qv l /(102ηCi) (KW)(1)上式中:K dz——平衡系数;φ=0.45Q——额定载荷;Q=400Kgv l——曳引机节径线速度;v l =0.7955m/sη——电梯运行的总效率;取η=0.9C i——曳引机曳引比;C i =2:1代入(1)式,N=(1-0.45)×400×0.7955/(102×0.9×2)=0.95(KW)选用VM450曳引机,电机功率N=1.1KW,其功率满足上式计算要求。
二、电梯运行速度的计算:根据公式:V=π×D×n m / (60×C i)上式中:D ——曳引轮节圆直径, D=200mmn m ——电机的转速, n m=76rpmC i ——曳引比;C i =2:1V=(3.14×0.2×76)/ (60×2)=0.4m/s选用曳引机能够满足速度要求。
电梯安全钳的混合高斯分布可靠性分析方法

0 引言电梯安全关系着所搭载乘客的人身安全以及所装载物品的安全,特别是客梯安全,危及生命安全,故确保电梯安全是非常必要的。
电梯安全不仅指电梯零部件的强度刚度满足要求,安装牢靠,机械原理合理,机械动作顺畅等,还应包括对结构合理、可靠性、电气控制等各方面综合考虑,针对各种潜在的危险,提出应对措施。
针对电梯失控下坠这一危险情景,其关键的安全保护装置安全钳的误动作及故障失效将会严重危及乘客和货物的安全。
电梯安全钳是电梯的失速保护装置,与限速器一起构成限速器-安全钳系统,当电梯失速时,通过该系统将电梯轿厢紧急制停[1],从而对电梯进行安全保护。
安全钳的误动作一般有以下几种情况:1)限速器橡胶轮的离心力过大,2)安全钳楔块与导轨间隙不正确,3)楔块动作迟滞。
为了避免以上安全钳误动作,通常需要在电梯安装过程中十分注意,必须严格依据电梯安装要求,排除电梯安全隐患和潜在危险问题。
一种新研发的新型电梯安全钳提拉机构,用于替代传统限速器-安全钳系统,其作用原理是依靠弹簧储存和释电梯安全钳的混合高斯分布可靠性分析方法*刘 钊 李 伦 段红林 俞 水1四川省特种设备检验研究院 成都 610000 2四川省化工质量安全检测研究院 成都 6100313轨道交通运维技术与装备四川省重点实验室 成都 6100131摘 要:安全钳作为电梯必备的防坠装置,其运动可靠性对电梯安全起着决定性的作用。
为了高效高精地估计安全钳在制动电梯过程中的运动可靠性,开发了融合拉丁化部分分层抽样(Latinized partially stratified sampling,LPSS)和混合高斯分布的时变运动可靠性分析方法。
以安全钳制动面板加速度不超过电梯安全加速度构建性能函数;基于时变可靠性极值分析方法,采用拉丁化部分分层抽样方法估计安全钳性能函数的原点矩;以混合高斯分布原点矩的数值表达与性能函数原点矩相等构建多元方程组,求解混合高斯分布的参数,计算安全钳运动可靠性。
电梯安全部件之---安全钳

电梯安全部件之---安全钳安全钳是电梯的安全保护装置。
电梯安全钳装置是在限速器的操纵下,当电梯速度超过电梯限速器设定的限制速度,或在悬挂绳发生断裂和松弛的情况下,将轿厢紧急制停并夹持在导轨上的一种安全装置。
它对电梯的安全运行提供有效的保护作用,一般将其安装在轿厢架或对重架上。
组成:安全钳装置是由安全钳操纵机构和安全钳体两部分组成。
即安全钳机构动作时,首先触动电器机构使电梯安全回路断开制停电梯,如果制动器无法制停时安全钳就会进一步动作,使电梯制停在导轨上。
种类:电梯用安全钳按照其制动元件结构形式的不同可分为锲块型、偏心轮型和滚柱型三种,按制停减速度(制停距离)的不同可分为瞬时式和渐进式两种。
重要性:安全钳杠杆-限速器钢丝绳-张紧轮-限速器-夹绳器,是保证电梯在出现不正常状态时,及时进入保护状态的第一套机械保护措施。
工作原理:安全钳的工作原理是:由安全钳杠杆带动限速器钢丝绳,由张紧轮保持限速器钢丝绳与限速器轮的摩擦力,使得限速器轮转速与轿厢运行速度保持一致。
在轿厢(安全钳、安全钳杠杆、限速器钢丝绳、限速器轮)运行速度≥115%额定速度时,限速器动作,由刹绳块压迫限速器钢丝绳,使其停止运转,并带动安全钳杠杆,使安全钳动作。
协调标准一种渐进型设备,使得轿厢速度超过1米/秒;具有缓冲效果的瞬时型安全钳,使得速度不超过1米/秒;瞬时型安全钳,使得速度大于0.63米/秒;使用范围安全钳分为瞬时式安全钳和渐进式安全钳,瞬时式安全钳使用≤0.63m/s的电梯,渐进安全钳用于>0.63m/s的电梯。
校验调试:安全钳是电梯中最重要的安全部件,只有保证了安全钳的安全有效,才能保证电梯的安全。
值得注意的是:安全钳部件不是孤立的主体,只有与限速器正确配合使用才能达到应有的作用。
安全钳装置包括安全钳本体、安全钳提拉联动机构和电气安全触点。
安全钳按结构和工作原理可分为瞬时式和渐进式安全钳。
瞬时式安全钳在动作时,轿厢的动能和势能主要由安全钳的钳体变形和挤压导轨所消耗。
安全钳提拉机构的设计
安全钳提拉机构的设计崔莹【摘要】SAM is a safety actuation module, another name is safety lifting system. This system is one of the most important system in elevator. SAM system can transfer governor force to the safeties which installed on the both side of car or CWT.Then safety wedges can contact the surface of guide rail and stop the elevator. This paper introduce the function, parameters, design requirement and the calculation method of inertia and spring tension. SAM system can be designed according those parameters. This paper provide the design requirements of EN81 and A17.1. And also introduce the verification method of SAM system. Designers can reference to this paper.%SAM是电梯的触动系统, 又名安全钳提拉机构, 是电梯的重要安全部件之一. SAM系统将限速器提拉力传递到两侧安全钳, 安全钳楔块压紧导轨接触面并制停电梯.本文阐述了电梯安全部件的基本性能、重要参数和设计要求.详述了系统惯性力、弹簧拉力的计算方法.为SAM系统部件设计和选型提供重要的参数依据.同时本文提供了欧标和美标对SAM系统的设计要求, 以及SAM部件选型的验证方法.为设计者提供设计依据.【期刊名称】《天津理工大学学报》【年(卷),期】2019(035)002【总页数】3页(P42-44)【关键词】提拉机构;限速器拉力;系统惯性力;弹簧拉力【作者】崔莹【作者单位】基伊埃机械设备(天津)有限公司,天津 301700【正文语种】中文【中图分类】TU229随着社会的进步电梯已经是我们日常必不可少的工具,电梯的可靠性和安全性是大家关注的焦点.本文详细介绍了电梯安全部件选型、SAM系统设计以及验证方法. SAM(Safety Actuation Module)是又叫安全钳提拉机构,它将限速器提拉力传递到轿厢或者对重安全钳.SAM 系统包括钢丝绳,阻尼杆,弹簧,连杆等.当电梯正常运行时,SAM 可以防止安全钳误动作;电梯超过额定速度的115%时,限速器被触动,限速器钢丝绳拉紧,SAM 系统受到限速器提拉力,将提拉力同时传递给安全钳,达到安全钳动作并制停电梯[1-3].1 电梯主要安全部件1.1 电梯安全系统示意图图1 是电梯安全系统的示意图,安全钳提拉机构安装在电梯上梁.很多电梯也将提拉机构安装在下梁上.两种安装形式是由电梯的整体设计和成本决定,但是功能基本相似.图1 电梯安全系统示意图Fig.1 Diagram of elevator safety system1.2 电梯安全部件限速器:电梯一般使用离心限速器.大多安装在机房.作用是在电梯超速的工况下,断开安全回路,卡住限速器钢丝绳.主要参数是DPTF 和PTF,是限速器选型的重要依据[1-3].PTF 动态提拉力是指限速器作用在SAM 系统中的最大值,这是一个实验数值或者在限速器的参数目录中查到.DPTF 会随着电梯系统参数变化,如提升高度,速度等;PTF 限速器动作后作用在SAM 系统上的最小理论力,受到限速器摩擦力影响较大.在SAM系统设计中PTF 十分关键,用于校准系统所需的提拉力,并确认设计是否满足标准[4].阻尼杆:阻尼杆是连接限速器,防止限速器受到乘客或者其他外界因素干扰的装置,可以减少限速器开关故障或者误动作[5-6].安全钳:安全钳是当电梯上行或下行超速时,制停电梯的重要部件.目前电梯利用的是瞬时安全钳和渐进安全钳,当电梯运行速度小于等于0.63 m/s的时候可以考虑使用瞬时安全钳.渐进安全钳的触发后对轿厢的平均减速度为0.2 g 到0.5 g[7]. 提拉机构:提拉机构是连接限速器和轿厢或对重两侧安全钳的重要结构[8].当限速器动作,限速器钢丝绳将拉力传到提拉机构,提拉机构触动后通过连接杆主动侧和被动侧安全钳压紧导轨接触面[9-10].2 提拉机构的设计安全钳提拉机构设计重点在摇杆尺寸的确定和弹簧的选择.摇杆尺寸可以根据轿厢尺寸进行处设计,再根据验算结果进行微调.弹簧的选型是依据是和这两个重要参数.是弹簧在初始状态下的作用到SAM 系统的拉力,Fs′是弹簧在提拉状态下作用在SAM 系统拉力[1-2].下面是Fs 和Fs′的计算方法:图2 提拉机构动作示意图Fig.2 Diagram of SAM system公式(1)和公式(2)为提拉机构初始位置计算.公式(3)和公式(4)为提拉机构完全提拉状态受力.上式中:Ti 为系统惯性力;Fw 为安全钳楔块和提拉杆重量;Fs 为连接杆上弹簧所用在系统上的弹力;Fgov 为限速器的提拉力;h 为SAM 系统触动最小行程-安全钳动作的最小行程(安全钳参数表可查);Fgov 需要符合公式(5)或者公式(6)的要求.PTF 限速器作用在SAM 的最小理论静拉力,通过限速器参数表可得.Ti 是系统惯性力,分析见图3,由公式(7)可得:图3 系统受力分析图Fig.3 System force analysis式中:Acar 为轿厢下降最大加速度=g(自由落体)-a(轿厢系统下降反力)=0.8×(理论计算值);Mrope 为限速器绳的质量;Mimb 限速器环的不平衡质量(大多数系统为0);Jgov 为限速器绳轮惯性力;Rgov 为限速器绳轮半径;Jten_shv 为张紧绳轮惯性力;Rten 为张紧轮半径(一般等于限速器绳轮半径).3 SAM系统设计验证3.1 弹簧的验证弹簧在初始位置的压缩量(S-S1),当安全钳最大行程即弹簧到达最大压缩量为(S-S2).两个变形量可以通过设计模型中计算得出.则两个位置的弹簧力通过下面公式得出:初始位置满足公式(8):提拉位置满足公式(9):当满足Fs′<F<Fs′和Fs<F′<Fs 时,认为弹簧可以满足设计要求.3.2 限速器验证图4 是提拉机构的受力图,通过公式计算可以得出当电梯在正常运行状态和触发状态的受力情况,F即系统需要限速器提供的拉力,由公式(10)可得:当满足Ti < F < 0.5×PTF 时,认为系统受力满足设计要求.图4 提拉机构受力分析图Fig.4 Force analysis of SAM system4 结论安全钳提拉机构是保证电梯安全运行的重要部件之一,需要做到在电梯正常运行时安全钳不因受到干扰而被触动,即满足系统所受到的力小于系统惯性力,否则将出现安全钳误动作现象;当电梯超速时则可以触发限速器,提拉机构和安全钳等部件动作.保证电梯和乘客的安全.文中重点强调了提拉系统的弹簧受力和选型.弹簧是重要部件,关系到主动侧安全钳和被动侧安全钳是否能严紧导轨接触面.弹簧的受力计算是关键,本文为设计者提供了设计参考.参考文献:【相关文献】[1]刘光.论电梯限速器-安全钳联动的试验[J].科技创新导报,2011(12):62-62.[2]许佳滨.关于电梯检验中限速器-安全钳联动试验的工作原理及失效的原因分析[J].内燃机与配件,2017(14):74-75.[3]查道鹏.浅谈电梯限速器-安全钳联动试验[J].科技信息,2013(21):118-118.[4]连海文.电梯限速器-安全钳联动机构的故障分析[J].科技创新与应用,2013(26):105-105.[5]宋旺业.电梯检验中安全钳和限速器常见问题分析[J].科技创新与应用,2017(18):131-131.[6]陈彬彬,鲁玉博.电梯安全保险装置设计的技术方案[J].职业教育(下旬刊),2017(5):18-22.[7]唐涛.如何保证电梯安全运行[J].建筑安全,2000(6):41-41.[8]王坚,张国安.电梯安全风险的评价方法[J].中国特种设备安全,2012(3):51-54.[9]黄雯雯.电梯安全钳工作原理与故障分析[J].科技传播,2014(4):159-159. [10]海曼.电梯安全钳的结构及性能分析[J].大众标准化,2005(5):18-20.。
浅析电梯限速器安全钳联动机构故障

浅析电梯限速器安全钳联动机构故障作者:李加将来源:《商品与质量·学术观察》2014年第01期摘要:随着经济的迅速发展,电梯也普及到日常生活中。
在电梯的日常使用中,保证电梯的安全运行是重中之重,在电梯的使用中由于制动器失灵、制动力不足、曳引条件不满足要求,或钢丝绳断裂以及失去控制等各种原因都有可能引起轿厢超速或坠落,对乘客安全构成极大威胁,此时合格的限速器-安全钳联动机构能将轿厢及时地制停在导轨上,最大程度保证乘客的安全。
本文阐明限速器安全钳联动机构的原理及要求,并根据实际工作经验,对限速器-安全钳联动机构进行讨论,并对故障进行分析。
关键词:垂直电梯限速器安全钳一、限速器安全钳联动机构的原理1、限速器工作原理电梯限速器是电梯安全保护系统中的安全控制部件之一。
当电梯在运行中无论何种原因使轿厢发生超速,甚至发生坠落的危险,而所有其他安全保护装置不起作用的情况下,则限速器和安全钳发生联动动作,使电梯轿厢停住。
限速器工作原理是:当电梯运行速度超过额定速度,限速器上的超速电气开关会发生动作,从而切断安全回路,使制动器抱闸制停电梯。
如果电梯继续超速,即制动器不能有效令电梯减速,当超过额定速度的115%但小于规定值时,限速器中的机械装置动作,限速器停止旋转。
限速器有两种分类类:1、摆锤式;2、离心式(1)摆锤式限速器一般是采用限速器轮上的凸轮以带动摆锤进行摆动,其摆锤摆动的振幅和频率会随着绳轮转速的增加而不断增加,如果出现绳轮转速接近或者达到额定速度,那么摆锤会触发限速器的安全开关动作,使绳轮制停,完成电梯的制动,以便进一步拉动安全钳进行保护。
一般常见于老式的电梯。
(2)离心式限速器工作原理是:利用连杆机构使甩块与限速器同步转动,如果电梯运行速度超过了额定速度,在离心力的作用下甩块会向外甩开,甩到一定程度时电气开关会因此动作,此时制动器应抱闸使电梯减速。
若是电梯的速度继续增大,当到达到限定值时,棘爪便会动作,棘轮在棘爪的带动下开始转动,钢丝绳钳块便会夹住限速器绳,拉动安全钳完成电梯的制停。
对电梯限速器提拉力计算的讨论

对电梯限速器提拉力计算的讨论作者:刘文林来源:《品牌与标准化》2014年第02期【摘要】电梯限速器是电梯安全保护系统中的安全控制部件之一,本文就限速器动作时限速器绳上拉力变化从钳体和限速器绳受力的角度做简单讨论和分析。
【关键词】限速器拉力计算电梯限速器,是电梯安全保护系统中的安全控制部件之一。
当电梯在运行中无论何种原因使轿厢发生超速,甚至发生坠落的危险,而所有其他安全保护装置不起作用的情况下,则限速器和安全钳发生联动动作,将电梯轿厢制停在导轨上,并保持静止状态,从而避免发生人员伤亡及设备损坏事故。
本文就限速器动作时限速器绳上拉力变化从钳体和限速器绳受力的角度做简单讨论和分析。
1 限速器作用及标准相关要求限速器的作用是,随时监测控制着轿厢的速度,当出现超速度情况时,即电梯运行速度大于额定速度的115%时,能及时发出信号,继而产生机械动作切断供电电路,使曳引机制动。
如果电梯仍然无法制动,则安装在轿厢底部的安全钳动作将轿厢强制制停。
限速器是指令发出者,而安全钳是执行者。
两者的共同作用才出现了安全电梯之说。
GB7588-2003《电梯制造与安装安全规范》对限速器的规定是:“9.9.4限速器动作时,限速器绳的张力不得小于以下两个值的较大值:a)安全钳起作用所需力的两倍;b)300N。
”和“9.9.6.2限速器绳的最小破断载荷与限速器动作时产生的限速器绳的张力有关,其安全系数不应小于8。
”2 限速器作用受力分析(a)正常工作状态(b)制动状态图1 限速器绳张力示意图如图1所示,设安全钳与限速器连接于A点。
可知,(a)为正常工作状态A点受力情况:[G1]为限速器绳自身重量,包括保险绳头、拉杆、连接架和楔块的重量;[G2]为限速器滑轮和重锤的重量作用在A点的拉力;[ft]为此时克服限速器绳轮、张紧轮与转轴间的摩擦力所需的力。
可知,在此状态下,钢丝绳各处受力基本相等(钢丝绳自重不计)。
(b)为限速器制动状态受力情况:对于连接点A上的C点,[fg1]为绳上受到的额外拉力;[G1]为限速器绳自身重量,包括保险绳头、拉杆、连接架和楔块的重量;[ft]为此时克服限速器绳轮、张紧轮与转轴间的摩擦力所需的力,这里有通用公式:[ft=(1-μ1μ2)(G1+G2)],这里:[μ1],[μ2]分别是滚动和滑动轴承摩擦系数;[G2]为限速器滑轮和重锤的重量作用在A点的拉力。
电梯安全钳工作原理

电梯安全钳工作原理
电梯安全钳是一种用于保护电梯乘客安全的装置。
它采用机械原理,通过与电梯导轨之间的摩擦力来避免电梯的自由下坠或超速运行。
电梯安全钳通常安装在电梯井壁上,并与电梯导轨对应位置配合使用。
当电梯正常运行时,安全钳与导轨之间的摩擦力较小,电梯能够自由上下运行。
然而,一旦遇到电梯自由下坠或超速运行的情况,安全钳会迅速发挥作用。
它会自动打开并迅速移动到电梯导轨上,形成与导轨之间的强大摩擦力。
这种摩擦力的作用下,安全钳能够有效地阻止电梯的继续下坠或超速运行,保护乘客的安全。
电梯安全钳工作原理的关键在于摩擦力的运用。
通过增大安全钳与导轨之间的接触面积,摩擦力得以提升,从而有效地阻止电梯的异常行为。
此外,电梯安全钳一般采用双剪式结构,确保在发生异常情况时可以更可靠地夹住电梯导轨。
需要注意的是,电梯安全钳的工作原理需要与电梯的其他安全装置协同配合使用,如电梯制动系统。
只有在各项安全措施的配合下,电梯的运行才能更加安全可靠,保障乘客的出行安全。
电梯安全钳动作受力分析及失效探究

电梯安全钳动作受力分析及失效探究作者:梁洪来源:《中国科技纵横》2017年第24期摘要:在社会的发展完善下,高层建筑数量增加,人们对电梯的需求也在无形中提升。
电梯安全钳的应用能够更多确保电梯的使用安全。
为此,文章结合电梯安全钳原理,对电梯安全钳的受力情况和应用失效问题进行探究。
关键词:电梯安全钳;受力分析;失效探究中图分类号:TU857 文献标识码:A 文章编号:1671-2064(2017)24-0055-021 电梯安全钳运作原理电梯的安全钳系统主要由限速器、安全钳、张紧轮及其他部件组成,具体结构如图1所示。
电梯安全钳运作原理是在电梯应用的时候,如果出现了电梯意外事故,电梯会迅速下行。
当电梯快速下行的时候,速度可能会超过限速器设定的速度,通过甩块(或者类似结构)的离心力作用,限速器在这个时候会因为快速运作卡紧相关的限速器结构(例如棘轮),从而导致电梯限速器停止运作。
限速器在摩擦力的影响下向上提拉安全钳钳块动作,而电梯轿厢由于惯性持续下行。
在电梯下行的时候,产生相对运动,导致安全钳钳块、导轨、轿厢之间间隙减小并且并紧卡死,从而避免电梯下坠引起安全事故。
2 电梯安全钳受力分析电梯安全钳在不同状态下的受力情况不同,具体可分为五种,具体如图2所示。
图2(a)是电梯在轿厢中被卡住之后停止时候的受力情况,在电梯停止之后钳块会受到6个力的作用。
电梯轿厢和钳块之间作用能够产生压力F、反作用力F’,电梯导轨和钳块互相作用带来的正压力Q、反作用力Q’,P是钳块的重量,R是拉杆上弹簧对钳块带来的拉力,电梯限速绳带来的摩擦力是T。
结合各种受力情况得到电梯安全钳受力分析公式:F·sinθ-Ffcosθ-Q=0F·cosθ+Ffsinθ-T=0。
图2(b)是钳块与轿厢及导轨无相互作用时候电梯安全钳的受力情况。
Q=0,Q′=0,F=0,F′=0。
图2(c)是电梯安全钳和电梯导轨之间产生的作用力。
这个时候电梯安全钳的受力计算公式为:N=Q1-F1fsinθ-F1cosθ。
电梯安全钳提拉机构以及与安全钳的关系
见的同初始角度对安全钳动作的同步性影 响进行分析。
2.1转臂铅垂布置式
如图4所示,电梯正常运行时,转臂所 处的位置是铅垂位置。 此种布置方式是完全 对称式结构,其制造和安装都较为简单,目 前在实际运用中是比较常见的。 下面简单计 算分析它对两侧安全钳动作同步性的影响。
图4 转臂铅垂布置式
由图4可知,初始位置时,连杆AB的长 度为
L A2 4R 2
式中:
图3 安全钳提拉机构简化图 L-连杆长度; A-两站轴间距离; R-转臂半径; β-中东转臂丛初始位置开始提拉到制动元件
由图3可见,这种提拉联动机构实际上 是一个曲柄摇杆机构,主动转臂可视为曲 柄,从动转臂可视为摇杆。要保证轿厢两侧 安全钳的同步动作, 安全钳提拉机构要满 足下面的条件: 从安全钳制动元件开始被提 拉到制动元件与导轨侧面问的间隙消除, 开 始楔入钳座和导轨之间的过程中,主、从动 转臂所转的角度应相等。 在安全钳制动过程 中,主、从动转臂转过的角度一般不超过45 ゜。在这个有限的转角范围内,转臂的初始 角度(指电梯正常运行时安垒钳提拉机构 主、从动转臂与铅垂线的夹角口),直接影 响两侧安垒钳动作的同步性。 下面就几种常
2 提拉机构对两安全钳动作同
2012 年 10 月
电梯安全钳提拉机构以及与安全钳的关系
步性的影响
国家标准GB7588一1995中第9.8.7条规 定: “在载荷(如果有的话)均匀分布的情况 下, 安全钳装置动作后轿厢地板的倾斜度应 不得大于其正常位置的5% ”。这里实际也 提出了一个轿厢两侧安全钳动作的同步性 问题。图3所示是上提拉式安全钳提拉机构 简化图,为叙述方便,把与限速器绳提拉臂 同轴安装的一侧称为主动侧, 另一侧为从动 侧。
续转过β/2角时, 如果从动转臂也相应转过 了β/2角,则连杆A′B′的长度为
电梯检验限速器-安全钳联动实验常见问题分析

电梯检验限速器-安全钳联动实验常见问题分析摘要:限速器和安全钳是电梯十分重要的机械安全保护装置,也称之为断绳保护和超速保护。
限速器的钢丝绳围绕着绳轮和底坑中的涨紧轮形成一个闭环,其绳头部与轿厢紧固在一起,并通过机械连杆与安全钳连起来。
如果轿厢超速,限速器立即动作,触发夹绳装置夹紧钢丝绳。
当轿厢继续下降时,钢丝绳拉动安全钳运作使安全钳对导轨产生摩擦力,把轿厢迅速制动在导轨上,停止运动。
无论是限速器还是安全钳都不能单独完成上述任务,上述任务的完成靠它们的配合来实现的。
关键词:限速器;安全钳;联动试验1导言电梯一般来说广泛采用曳引驱动方式。
曳引机作为驱动机构,钢丝绳挂在曳引机的绳轮上,一端悬吊轿厢,另一端悬吊对重装置。
曳引机转动时,由钢丝绳与绳轮之间的摩擦力产生曳引力来驱使轿厢上下运动。
2限速器限速器是一个超速探测装置,一般安装在电梯机房或电梯井道顶部,也有装于底坑的情况。
当电梯超速达到设定的电气动作速度时,它会通过电气开关切断电梯的安全回路,进而切断系统电源。
如果电梯由于重力或惯性还继续超速,会触发限速器的机械动作装置,使限速钢丝绳停止运动,从而提拉安全钳。
3安全钳安全钳是一个制动装置,安装在电梯轿厢或电梯对重装置底部。
它包括提拉机构和制动机构两部分。
提拉机构的作用是将限速器的机械动作传递到制动机构并使制动机构动作,制动机构动作后其内部的楔形块会将电梯卡在导轨上,避免电梯进一步坠落。
为了防止出现曳引机继续旋转,专门设置了安全钳开关,安全钳动作作时,其开关动作并切断控制回路。
4电梯限速器-安全钳在检验规则中的规定特种设备安全技术规范TSG T7001—2009《电梯监督检验和定期检验规则—曳引与强制驱动电梯》中第2.9项规定受检电梯的维护保养单位应当每2年(对于使用年限不超过15年的限速器)或者每年(对于使用年限超过15年的限速器)进行一次限速器动作速度校验,校验结果应当符合要求。
第8.4项规定如下:(1)施工监督检验:轿厢装有下述载荷,以检修速度下行,进行限速器-安全钳联动试验,限速器、安全钳动作应当可靠:①瞬时式安全钳,轿厢装载额定载重量,对于轿厢面积超出规定的载货电梯,以轿厢实际面积按规定所对应的额定载重量作为试验载荷;②渐进式安全钳:轿厢装载1.25倍额定载重量;对于轿厢面积超出规定的载货电梯,取1.25倍额定载重量与轿厢实际面积按规定所对应的额定载重量两者中的较大值作为试验载荷;对于额定载重量按照单位轿厢有效面积不小于200kg/m2计算的汽车电梯,轿厢装载1.5倍额定载重量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[2] 林永光. 电梯安全钳动作原因分析及检验注意点[J].机
电技术,2009(1).
[3] 罗礼森. 电梯夹绳式限速器—安全钳联动试验失效分析
[J]. 机电工程技术,2010,39(10):89-91.
[4] 叶友谊. 浅析电梯限速器-安全钳联动试验失效[J]. 机电
工程技术, 2010.5.
[5] GB7588-2003 电梯制造与安装安全规范. 中国标准出版
设备运维
电梯安全钳提拉机构的计算
朱宇华(上海市特种设备监督检验技术研究院,上海 200062)
摘要:本文针对限速器——安全钳联动装置在电梯中的失 效模式进行分析,通过计算可以得出限速器——安全钳联动装 置的失效原因主要是由安全钳提拉力、弹簧装置、限速器钢丝 绳打滑等原因造成失效。因此在电梯检验时,合理地分析和计 算安全钳装置提拉机构的故障原因,并且采取相应纠正措施, 具有一定的现实价值。
不计算各转轴间的摩擦力,则可以把(μ4)省去。
T1①与 T1②的区别在于有否包含力 F2,T1不包含 F2,F2在安全 钳杠杆系统的提拉力中,是一对内力,不起阻碍作用,仅仅是安
全钳复位时的一个楔块复位作用。所以
T
1
=
T① 1
(3-3)
T1
=
1 203(0.9)4
(203
×
1g
+
102
×
3.5g
+
180
环,只要在限速器绳轮两侧的钢丝绳上加上能克服限速器钢丝
绳与张紧轮的摩擦力,那么钢丝绳就不会移动,此时,T2 有另一 种计算公式:
T2= T2②=(1-μ1μ2)(G1+G2)g =(1-0.97×0.99)(12.04+38.28)×9.8=266.15g
(3-4a)
如果按照(3-4)来计算,
则
T② 2
社,2003.
2
2017 年 07 月
构将失效。
电梯限速器——安全钳联动装置的失效模式在设计和运
行中至关重要,但常常被忽略。比如安全钳提拉力直接关系到
安全钳制动力的实际动作。所以,无论是在实际的设计中还是
在最终运行使用中,应该引起重视,综合分析其失效的原因。
参考文献:
[1] 连海文. 电梯限速器-安全钳联动机构的故障分析[J]. 科
技创新与应用,2013(26).
×
4
(3-3a)
×1.3g + 180 × 4 × 1.9g + 54 × 17.71) = 217.58(N)
若是把 F2错加上,则有:
T1
=
T② 1
=
1 203(0.9)4
(203
×
1g
+
102
×
3.5g
+
180
×
4
×
1.3g (3-3b)
+180 × 4 × 1.9g + 54 × 17.71 + 180 × 4 × 8.36) = 262.72(N)
全钳是静止的,所以安全钳上的各个应力是平衡的。该提拉杠
杆系统的各力对转轴 O 取矩为:
T① 1
=
1 203μ4
(203G3 g
+
102G4
g
+
180
×
4G5 g
(3-2)
+180 × 4G6 g + 54F1)
T② 1
=
1 203μ4
(203G3 g
+
102G4
g
+
180
×
4G5 g
(3-2a)
+180 × 4G6 g + 54F1 + 180 × 4F2) 取μ=0.9,其中(μ4)是为了考虑各转轴间的摩擦力因素,若
关键词:电梯;安全钳提拉力;安全钳制动力 电梯给人们的生活带来了便捷,它不仅提高了人们的生活 品质,同时还改变了人们对科学技术的认知。电梯限速器—— 安全钳联动装置在电梯中有着重要的作用,它保障了电梯的运 行安全。正因为电梯的使用频率较高,所以人们对电梯的安全 性才有更严格的要求。所以防止电梯限速器——安全钳联动 装置失效是尤为重要,分析和解决失效问题,才能避免事故的 发生。 电梯安全钳装置包括安全钳及安全钳提拉机构。电梯安 全钳提拉力机构的形式是由安全钳的类型和轿架结构所决定 的。电梯的安全钳通常情况下是安装在电梯井道内,轿厢架子 的底部两端或者下梁两边的立梁里。安全钳的提拉力可以分 为上提拉力和上推式。上提拉力运用较为广泛。设计不合理 的安全钳提拉机构可能会引起电梯安全钳的误动作或者无法 正常动作。因此,需要验证电梯安全钳的提拉力是否可靠。 《GB7588—2003 电梯制造与安装安全规范》第 9.9.4 条规 定:“限速器动作时,限速器绳的张力不得小于以下两个值的较 大者:a) 安全钳起作用所需力的两倍;或 b)300N。” 下面以一台通用的瞬时式安全钳为例,计算提拉力。图 32 为安全钳提拉杠杆系统,图 3-3 为限速器传动系统。
G5——拉杆的质量,G5=1.3kg
G6——楔块的质量,G6=1.9kg
F1——连杆系统弹簧的张力,F1=17.71N
F2——拉杆弹簧的张力,F2=8.36N
μ——为安全钳转轴与轿架的摩擦系数,
当安全钳起作用时,所需的提拉力 T 为:
T=T1+T2
(3-1)
T1为提拉安全钳杠杆系统所需的力,电梯在正常运行中,安
T2 是为克服限速器绳轮、张紧轮与转轴间的摩擦力所需
的力。
T2
=
(
G1
+ 2
G2
)g
+
(1
-
μ1
μ
2)(G1
+
G
2)g
(3-4)
式中:μ1——滚动轴承的摩擦系数,取值为 0.97
μ若2— 是—去滑除动(G轴1 +2承G的2 )g摩的擦力系,数则,是取另值为一
0.99 种体
现
。
当
电
梯
没
有
安全钳的时候,限速器绳轮与张紧轮被钢丝绳绕城一个封闭
图 3-2 安全钳提拉杠杆系统
图 3-3 限速器传动系统
T——安全钳的提拉力,N
T1——提拉安全钳杠杆系统所需的力,N
T2——客服限速器绳轮,张紧轮与转轴间的摩擦力所需的
力,N
G1——张紧轮的质量,G1=12.04kg
G2——重锤的质量,G2=38.28kg
G3——保险绳头的质量,G3=1kg
G4——连接架的质量,G4=3.5kg
=
ቤተ መጻሕፍቲ ባይዱ
(
G1
+ 2
G2
)g
+
(1
-
μ1
μ2)(G1
+
G2)g
= (12.04
+ 2
38.28
)9.8
+
19.58
=
266.15(N)
由此可得:
(3-4b)
当 T=237.16<300(N) 符合要求
当 T=528.67>300(N) 不符合要求
因此,对于电梯限速器——安全钳联动装置来讲,安全钳
提拉机构若是不满足张力不小于 300N 时,此安全钳的提拉机
图32安全钳提拉杠杆系统图33限速器传动系统t安全钳的提拉力nt1提拉安全钳杠杆系统所需的力nt2客服限速器绳轮张紧轮与转轴间的摩擦力所需的力ng1张紧轮的质量g11204kgg2重锤的质量g23828kgg3保险绳头的质量g31kgg4连接架的质量g435kgg5拉杆的质量g513kgg6楔块的质量g619kgf1连杆系统弹簧的张力f11771nf2拉杆弹簧的张力f2836n为安全钳转轴与轿架的摩擦系数当安全钳起作用时所需的提拉力t为