一种旋转型超声波电动机转速控制方法-论文
超声波电机驱动控制器毕业设计论文
毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
旋转行波超声电机结构设计

编号无锡太湖学院毕业设计(论文)题目:旋转行波超声电机结构设计信机系机械工程及自动化专业学号:学生姓名:指导教师:(职称:副教授)2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)旋转行波超声电机结构设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目旋转行波超声电机的结构设计2、专题超声电机的结构设计二、课题来源及选题依据传统的电机如电磁电机或者直流电机在使用中往往受到很多方面的限制,在某些特定的环境下如真空中,或者不可有磁场影响的环境下往往无法发挥良好的性能。
为此,一种新型的电机的设计对于人们的各行各业的使用开始至关重要。
超声电机是一种利用压电陶瓷的逆压电效应,依靠定子和转子的摩擦耦合从而获得能量。
超声电机具有结构简单,体积小,耐高温等特点,这些特点让超声电机可以在航空航天,汽车,磁悬浮列车等方面能发挥无可取代的作用。
三、本设计(论文或其他)应达到的要求:①熟悉超声电机的历史及发展历程,对超声电机的适用领域及特点性能有全面的了解;②充分解析超声电机的工作原理以及各部件的作用;③掌握ANSYS有限元分析软件对超声电机的可行性进行分析,确定超声电机的可行性;④对超声电机的可行性进行分析,得到超声电机的可行性理论值,与ANSYS 分析得到的结果进行对比,确定超声电机的可行性模态;⑤对超声电机的各部件尺寸进行设计,并且绘制出各零件的零件图以及装配图;四、接受任务学生:机械94 班姓名五、开始及完成日期:自2012年11月7日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长研究所所长〕签名系主任签名2012年11月7日摘要超声电机是利用压电陶瓷的逆压电效应,激励弹性体产生谐振作用,把电能转换成微米级振幅的振动,再依靠定子和转子之间产生的摩擦耦合将这细微振动扩大为转子及与之相联的轴的旋转运动。
旋转行波型超声波电动机的控制系统
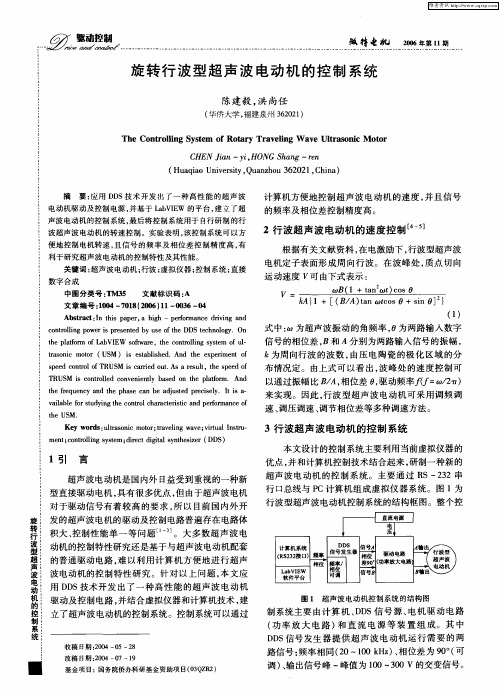
优 点 , 和计算 机控 制技 术结合 起来 , 并 研制 一种新 的 超 声 波 电 动机 的控 制 系 统 。主 要 通 过 R S一22串 3 行 口总线与 P C计算 机 组成 虚 拟 仪器 系 统 。图 1为 行 波 型超声 波 电动机控 制 系统 的结构框 图 。整个控
k为周 向行 波 的 波 数 , 由压 电 陶 瓷 的极 化 区域 的分
t s nc m tr( S r o i oo U M) i et l h d A d te e p r e t o a s s b i e . n h x e m n f a s i
s e d c nto fTRUSM sc rid o . e u t h p e f p e o r lo i a re ut Asa rs l .t e s e do
v ia e frsu i g t o to ha a t rsi n ro a eo a lbl o t dyn hec n r lc r ce tc a d pe r nc f i f m t he USM .
Ke r s: l a o i tr ta e ig w v ; i u n t — y wo d ut s n c moo ;r v l a e vf a I sr r n ll u
Abs r t:n t i pe , g — pef r a c d vn nd tac I h s pa r a hih rom n e r i g a i
电机 定子 表面 形成 周 向行 波 。在 波 峰处 , 点 切 向 质
运 动速度 可 由下式 表示 :
一
旦 ±! : 2 旦 ( 垒 竺
T RUS i c n r l d c n e i nl a e n t e pa o . An M s o t l o v n e t b s d o h lt r oe y fm d
超声波电机转速的PIDNN控制
超声波电机转速的PIDNN控制朱宜家;陈国光;范旭;杨智杰;白敦卓【摘要】针对行波超声波电机运行过程中的较强时变性与非线性特征,引入了一种比例—积分—微分神经元网络(PIDNN)电机速度控制器.控制器网络融合了状态转换函数,具备动态映射能力,利用PID控制律先验知识确定权值初值,通过可变学习速度反传算法(VLBP)在线学习,使训练结果快速收敛,不易陷入局部极小,从而实现对超声波电机稳定快速的控制.采用参数变化电机模型对控制器进行仿真校验,仿真结果表明:方法具有较快的响应速度和较高的鲁棒性,能通过在线学习补偿电机运行过程中的非线性.%Aiming at strong time-varying and non-linear characteristics in the process of ultrasonic motor operation,a motor speed proportion integration differentiation neural network(PIDNN)controller is introduced. The controller network fuses the state transition function,and uses the PID control law prior knowledge to determine the initial value of the weights. Through the variable learning speed BP(VLBP)algorithm,training results are quickly converged and it is difficult to fall into the local minimum,so as to stably and fastly control ultrasonic motor. Use parametric-variable motor model to simulate and verify controller. The simulation results show that the method has a fast response speed and high robustness,and can compensate the nonlinearity of the motor during operation by online learning.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)011【总页数】4页(P60-63)【关键词】超声波电机;比例—积分—微分神经网络;可变学习速度反传算法;速度控制【作者】朱宜家;陈国光;范旭;杨智杰;白敦卓【作者单位】中北大学机电工程学院,山西太原030051;中北大学机电工程学院,山西太原030051;中北大学机电工程学院,山西太原030051;中北大学机电工程学院,山西太原030051;豫西工业集团有限公司,河南南阳473000【正文语种】中文【中图分类】TP273由于超声波电机[1~3]特殊的工作原理,其输出特性会随环境温度、摩擦损耗、驱动激励频率等因素变化呈现出严重的非线性与时变性,因此,难以建立其精确数学模型。
一种旋转型超声波电动机转速控制方法

一种旋转型超声波电动机转速控制方法
白永明;孙志峻
【期刊名称】《微特电机》
【年(卷),期】2014(042)006
【摘要】超声波电动机是一个高度非线性系统,采用传统控制方法无法取得良好的控制效果.为了研究超声波电动机在有负载工况下的性能并实现其在工程领域的推广应用,必须找到一种有效的控制方法.BP神经网络PID控制器非常适合非线性系统的控制,具有结构简单、鲁棒性好、PID参数能在线实时调整的优点,设计了一种BP神经网络PID控制器,用于旋转型超声波电动机的转速控制研究.控制器的输入层节点数为3,隐含层点数为5,输出层节点数为3.通过一系列试验研究,发现采用BP 神经网络PID控制取得了较好的控制效果,为超声波电动机的工程应用找到一种有效可行的控制方法.
【总页数】4页(P64-66,69)
【作者】白永明;孙志峻
【作者单位】无锡工艺职业技术学院,宜兴214206;南京航空航天大学,南京210016
【正文语种】中文
【中图分类】TM359.9
【相关文献】
1.一种单相异步电动机转速控制方法的研究与实现 [J], 翟玉文;刘刚
2.基于单神经元自适应PID的超声波电动机转速控制 [J], 白永明;孙志峻
3.一种基于光流传感器的四旋翼室内位置控制方法 [J], 刘涵;郑鑫;张未辰;刘文迪;稂时楠
4.基于BPNN的超声波电动机转速控制与实验研究 [J], 武海强; 徐文潭; 王光庆; 崔素娟; 赵泽翔; 谭江平
5.一种基于串级线性自抗扰控制的四旋翼无人机控制方法 [J], 钟元; 章豪
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ke y wo r d s : u l t r a s o n i c mo t o r ; s p e e d c o n t r o l ;BP n e u r a l n e t wo r k s P I D c o n t r o l
式( 1 6 ) 中, / ( ・ ) =÷[ 1一 / ( x ) ] , 式( 1 8 ) 中,
为了使 P I D的三个参数为正值 , 特选取非负 的 S i g m o i d函数为输 出层神 经元 活化 函数 :
g ( ) = ( 1 0 )
输 出层 的三个 输 出节 点分 别为 P I D控制 算法 的
A u ( k ) =k 。 [ e ( k )一e ( k一 1 ) ] k i e ( k )+ 2 ) k [ e ( )一2 e ( k一1 )+e ( k一2 ) ] (
1 B P神 经 网络 P I D 控 制器
B P神 经 网络如 图 1所 示 。控 制 不 需 控 制 对 象
三个参 数 k 。 , k i , k d : 0 ( k ) =k p 1
0
。 ( k ) = k i }
’ ( k ) =k d J
( 9 )
0
性能 函数 选 用平 方 型误差 函数 :
E ( k ) = ÷[ 一 ( ) ]
( 1 1 )
n e u r a l n e t wo r k P I D c o n t r o l l e r w a s d e s i g n e d t o s t u d y t h e s p e e d c o n t r o l o f r o t a y r u l t r a s o n i c mo t o r .I n p u t l a y e r n o d e n u mb e r i s
e f f e c t b y a s e r i e s o f e x p e r i me n t a l s t u d y , a n d i s a n e f f e c t i v e a n d r e l i a b l e c o n t r o l me t h o d or f t h e e n g i n e e r i n g a p p l i c a t i o n o f u l —
电动机的控制研究基本是 电机在空载状态下进行控
制研 究 的。 为 了加 快 超 声 波 电 动机 在 工程 领 域 的 推 广 应
传统 P I D 的控 制算 法如 下 :
U ( k ) =u ( k一1 )+a u ( )
用, 必须 找 到一种 有效 可行 的控制 方法 。
A Spe e d Co nt r o l Me t ho d o n Ro t a r y Ul t r a s o n i c Mo t o r
B A I
一 m i n g , S U N Z h i - j u n
( 1 . Wu x i I n s t i t u t e o f A r t s& T e c h n o l o g y , Y i x i n g 2 1 4 2 0 6 , C h i n a ;
/ / 》 … …
0
。 ( k ) = n e t [ ( k ) ]
1 , 2 , …, Q( 5 )
综上 , 隐含层 权值 系数 的 自学 习算 法 :
式 中:
, Q分别 为 隐含层 的权 值 系数 和节 点数 。
) = a A w  ̄ 2 ) ( 一 1 ) + ’ ( ) ( 1 5 )
动机的工程应用找到一种有效可行的控制方法 。
关键词 : 超声波 电动机 ; 转速控制 ; B P神经网络 P I D控制
中图 分 类 号 : T M3 5 9 . 9 文 献标 志码 : A 文章编号 i 1 0 0 4 - 7 0 1 8 ( 2 0 1 4) 0 6 - 0 0 6 4 — 0 3
图 2 控制流程 图
式中: , Y ( k ) 为 系统 控制 的 目标值 和实 际测量 值 。 B P神经 网络 控 制 按 负 梯 度 方 向搜 索 调 整 权 值 系数 , 并 通过 增加 惯 性 项 使 搜 索更 加 快 速 收敛 至 最
e f f e c t .I n o r de r t o r e s e a r c h t he pr o pe r t i e s o f ul t r a s o n i c mo t o r wi t h l o a d c o n d i t i o n a nd r e a l i z e t h e a pp l i c a t i o n o f ul t r a s o n i c no —
t o r i n t h e e n g i n e e r i n g i f e l d, w e s h o u l d in f d a b e t t e r c o n t r o l me t h o d .BP n e u r a l n e t wo r k P I D c o n t r o l l e r i s v e r y s u i t a b l e f o r t h e
2 . N a n j i n g U n i v e r s i t y o f A e r o n a u t i c s &A s t r o n a u t i c s , N a n j i n g 2 1 0 0 1 6 , C h i n a )
Ab s t r a c t : Ul t r a s o n i c mo t o r i s a h i g h l y n o n l i n e a r s y s t e m ,u s i n g t h e t r a d i t i o n a l c o n t r o l me t h o d c a n n o t o b t a i n g o o d
3.hi dd e n l a y e r n o d e nu mbe r i s 5. a nd o u t p ut l a y e r n o d e nu mbe r i s 3. BP ne u r a l n e t wo r k PI D c o n t r o l a c hi e v e s g o o d c o n t r o l
g ( ・ ) =g ( ) [ 1一g ( ) ]。 B P神 经 网络 P I D控制 流程 如 图 2所示 。
) ]
( 1 8 )
式 中: ’ 为输 出层 的权值系数。 上述 公式 中上 角标 ( 1 ) 、 ( 2 ) 、 ( 3 ) 用 以区分输 入
层、 隐含层 和输 出层 。
0 引 言
超 声波 电动 机 因其 具 有 短 、 小、 轻、 薄 和无 电磁 干扰等 优点 在一 些需 无 磁 工 作 的医疗 器 械 、 深 空 探 测 设备 和各 种精 密仪 器等 高新技 术领 域有 着广 泛 的
应 用前 景 。
用 以及 经典 P I D控 制使 用 成 熟 、 结 构 简单 和容 易 实 现等 优 点 , 设计一种 B P神 经 网 络 P I D控 制
驱动控制
… …
白永明, 儆持电棚 2 0 1 4 年 第 4 2 卷 第6 期
… … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … ‘
。
∥
一
种 旋 转 型 超 声 波 电 动机 转 速 控 制方 法
B P神 经 网络输入 层节 点 的输入 : 0 ” = ( ) =1 , 2 , …,
式 中: 为输入 层 的节点 数 。 隐含层 的输 入 、 输 出分 别为 :
M
( 3 )
的精确数 学模 型、 在 非线性 控制 中 的广泛有 效应
6 4 i
收 稿日 期 : 2 0 1 3 一 o 9 — 0 1
c o n t r o l o f n o n l i n e a r s y s t e ms , a n d i t h a s a s i m p l e s t r u c t u r e , g o o d r o b u s t n e s s , r e a l — t i me a d j u s t m e n t o f P I D p a r a me t e r s . A B P
( 1 7)
输 出层 的输入Biblioteka 、 输 出分 别 为 : n e t [ ( ) =∑ w S ’ ’ ( )
0 ( k ) =g [ e £ 。 ( k ) ] f _1 , 2 , 3
( 7 )
( 8 )
) _ e ㈩ s g n 器 。
白永 明 , 孙 志峻
( 1 . 无锡工艺职业技术学院 , 宜兴 2 1 4 2 0 6 ; 2 . 南京航空航天大学 , 南京 2 1 0 0 1 6 )
摘
要: 超声波电动机是一个高度非线性系统 , 采用传 统控制方 法无法 取得 良好的控制效 果 。为 了研 究超声
波 电动机在有 负载工况 下的性 能并 实现其 在工程领 域 的推 广应用 , 必须 找到一 种有效 的控制方 法。B P神经 网络 P I D控制器非 常适合非线性 系统的控制 , 具 有结 构简单 、 鲁 棒性好 、 P I D参数 能在 线实时 调整 的优点 , 设计 了一 种 B P神经 网络 P I D控制器 , 用于旋转型超声波 电动机 的转速控 制研究 。控制器 的输入层 节点数 为 3 , 隐含层点 数为 5 , 输 出层节点数 为 3 。通过一系列试验研究 , 发现采用 B P神 经网络 P I D控制 取得 了较好 的控制效果 , 为超 声波 电