基于集成电路技术的机器人控制器设计
机器人控制系统
机器人控制系统随着科技的不断进步,机器人的应用越来越广泛,机器人控制系统成为了机器人技术中的重要一部分。
机器人控制系统是指通过集成电路、计算机和传感器等元器件,对机器人进行指令控制和数据处理的系统。
机器人控制系统的性能对机器人的行为、运动控制、感知和决策等方面均有重要影响,因此掌握机器人控制系统的原理和设计方法具有重要的意义。
本文将介绍机器人控制系统的基本原理、类型、结构组成和设计方法等方面的内容。
一、机器人控制系统的基本原理机器人控制系统的基本原理是通过计算机程序来控制机器人的动作和行为。
计算机程序是指由一系列指令组成的程序,可以实现对机器人的控制。
机器人控制系统中的传感器能够感知机器人的状态,将感知到的信息通过接口传输到计算机上,计算机将收到的信息进行处理,再将结果下达给执行器控制机器人的动作。
例如,可以通过编程实现机器人路径规划、障碍检测、姿态调整等动作。
二、机器人控制系统的类型根据机器人的应用场景和控制方式的不同,机器人控制系统可以分为三种类型:开环控制系统、闭环控制系统和开环闭环控制系统。
1、开环控制系统:又称为无反馈控制系统,其控制方式是将预设的控制命令发送到机器人,机器人按照预设的控制命令执行动作。
开环控制系统没有反馈传感器,不能感知机器人的状态,无法对机器人进行实时的调整和控制。
2、闭环控制系统:又称为反馈控制系统,它是在开环控制系统的基础上增加了反馈传感器,能够感知机器人的状态,将反馈信息传输到计算机中,计算机将根据反馈信息进行调整控制。
闭环控制系统可以提高机器人的精确度和稳定性。
3、开环闭环控制系统:开环闭环控制系统是将开环控制和闭环控制结合起来的一种控制方式,可以在需要高精度和稳定性控制时选择闭环控制,而不需要高精度和稳定性控制时选择开环控制,从而兼顾控制精度和效率。
三、机器人控制系统的结构组成机器人控制系统一般由传感器、执行器、控制器和通信接口等四个部分组成。
1、传感器:感知机器人的状态和环境,例如激光雷达、视觉传感器、力传感器等。
毕业设计(论文)-基于PLC的小车运动控制系统
IVT-REJX-50苏州工业园区职业技术学院毕业项目2011 届2011年5月20日项目类别:毕业论文项目名称:基于PLC 的小车运动控制系统专业名称:电子产品质量检测姓 名 :学 号 :班 级:指导教师:IVT-REJX-51苏州工业园区职业技术学院毕业项目任务书(个人表)系部:电子工程系毕业项目类别:毕业论文毕业项目名:基于PLC的小车运动控制系统校内指导教师:职称:工程师类别:专职校外指导教师:职称:工程师类别:兼职学生:专业:电检班级:1、毕业项目的主要任务及目标任务:结合工作实际,实现基于PLC的小车运动控制系统,完成小车运动控制系统得软硬件设计。
目标:完成一篇5000字以上的论文。
2、毕业项目的主要内容论文的主要内容:用plc控制小车的要求;I/O分配表和工作流程;小车运动系统的控制流程和梯形图;调试过程中的问题及解决方式。
要求:(1).采用学院规定的文档格式(2).论文正文层次分明,行文流畅,易懂(3).不得整段抄袭他人文章或技术资料3、主要参考文献(若不需要参考文献,可注明,但不要空白)[1]范次猛. 可编程控制器原理与应用[M].北京:理工大学出版;[2]张桂香.电气控制与PLC应用[M].北京:化学工业出版社;[3]邓则名,邝穗芳等.电器与可编程序控制器应用技术[M].北京;机械工业出版社;[4]曹辉.可编程序控制器系统原理及应用[M].北京:电子工业出版社;[5]戴冠秀.PLC在运料小车自动控制系统中的应用[J]. 工矿自动化6期,2005年;[6]李仁编.电器控制[M].北京:机械工业出版社;[7]郑凤翼.图解PLC控制系统梯形图和语句表[M]. 北京:人民邮电出版社;[8]廖常初.PLC应用技术问答[M].北京:机械工业出版社;[9]刘柏生. PLC编程实用指南[M]. 北京:机械工业出版社;[10]张万忠. 可编程控制器应用技术[M].北京:化学工业出版社;[11]赵华军. PLC 在生产线送料小车控制系统中的应用[J].机电工程技术,第36卷,第三期;[12]郝力文,王子文.车间运输小车的智能控制[J]. 机电工程.2001 年第28 卷增刊;[13]汪晓光,孙晓瑛,王艳丹.可编程控制器原理及应用[M].北京:机械工业出版社.2002.5;[14]张传祥.电气自动控制系统[M].北京:电子工业出版社. 2003;[15]王国庆.现在PLC的发展及其在先进制造技术中的应用[J].机电工程.1997年,第四期;[16]求是科技. PLC应用开发技术与工程实践[M]. 北京:人民邮电出版社. 2005年。
专用集成电路设计

专用集成电路设计引言专用集成电路(ASIC)是根据特定应用的需求进行定制设计的集成电路。
相比通用集成电路,ASIC更加高效、快速和可靠。
本文将详细讨论ASIC设计的原理、流程和应用。
ASIC设计原理ASIC设计的原理基于数字电子学和半导体技术。
在ASIC中,数字信号通过逻辑门的组合和时钟信号的控制来实现数据处理和控制功能。
ASIC设计流程ASIC设计流程可以分为以下几个步骤:需求分析在需求分析阶段,设计团队与客户紧密合作,明确设计目标和要求。
包括功能需求、性能指标、功耗要求等。
架构设计在架构设计阶段,设计团队根据需求分析的结果,确定ASIC的整体架构。
包括电路的模块划分、模块功能和接口定义等。
功能设计在功能设计阶段,设计团队根据架构设计的指导,对ASIC的功能电路进行详细设计。
包括逻辑电路设计、时序设计和电路优化等。
物理设计在物理设计阶段,设计团队对功能设计的结果进行布局和布线。
包括布局规划、金属层分配和信号线的布线等。
验证与测试在验证与测试阶段,设计团队对ASIC进行功能验证和性能测试。
包括电路仿真、时序分析和功能验证等。
产线生产在产线生产阶段,设计团队将验证通过的ASIC设计文件发送给芯片厂商进行生产。
包括掩膜制作、晶圆加工和封装测试等。
ASIC设计应用ASIC设计广泛应用于各个领域,如通信、计算机、汽车、工业控制等。
以下是一些常见的ASIC应用场景:通信领域在通信领域,ASIC被广泛用于数字信号处理、调制解调器、网络协议处理等功能。
ASIC可以提高通信设备的性能和稳定性。
计算机领域在计算机领域,ASIC用于处理器、内存控制器、图形处理器等重要组件。
ASIC可以提高计算机的处理能力和效率。
汽车领域在汽车领域,ASIC用于安全控制、驾驶辅助和车载娱乐等系统。
ASIC可以提高汽车的安全性和性能。
工业控制领域在工业控制领域,ASIC用于工业自动化、机器人控制和传感器接口等应用。
ASIC 可以提高工业生产的效率和稳定性。
基于单片机的智能扫地机-电路系统设计及装配与调试
基于单片机的智能扫地机-电路系统设计及装配与调试摘要如今,机器越来越智能,随着智能化时代到来,智能机器也给人民带来诸多便利。
家庭智能机器更是应用最广的地方,而智能扫地便能够给人们带来极大的方便,不仅能够给人类带来舒适干净的环境,还能推动社会智能化的发展。
本文主要设计一个简单的智能扫地机。
该扫地机的核心控制元器件是stc89c52,具有编写程序简单,成本普遍较低,功能较多,效率特别高等优点,因此在市场上得到很大的应用。
除此之外,该扫地机能够自动避开障碍物、自动利用风机进行吸尘功能。
该文介绍了扫地机系统的整体制作过程,它主要由单片机主控电路、单片机最小系统电路、红外光电避障电路、按键启动停止电路以及电机驱动电路组成。
通过利用Altium Designer集成电路设计软件,进行原理图以及电路板的设计。
其次通过KEIL编程软件为单片机输送程序,来控制整个扫地机的逻辑。
关键字:智能吸尘机;壁障;stc89c52单片机;L298NIntelligent Sweeper Based On MCU-Circuit system design, assembly and debuggingAbstractNowadays, machines are becoming more and more intelligent. With the coming of intelligent era, intelligent machines also bring many conveniences to people. Home intelligent machine is the most widely used place, and intelligent sweeping can bring great convenience to people. It can not only bring comfortable and clean environment to human, but also promote the development of social intelligence.This paper mainly designs a simple intelligent sweeper. The core control component of the sweeper is STC89C52, which has the advantages of simple programming, low cost, more functions and high efficiency, so it is widely used in the market. In addition, the sweeper can automatically avoid obstacles and use the fan for dust collection. This paper introduces the whole manufacturing process of the sweeper system, which is mainly composed of the main control circuit, the minimum system circuit, the infrared photoelectric obstacle avoidance circuit, the key start stop circuit and the motor drive circuit. By using the integrated circuit design software of Altium designer, the schematic diagram and circuit board are designed. Secondly, the logic of the whole sweeper is controlled by the program of keil.Keywords: intelligent vacuum cleaner; barrier; stc89c52 single chip microcomputer; L298N目录1、概述 ............................................................ 错误!未定义书签。
基于FPGA的六自由度机器人机械手臂的插补控制系统研究
基于FPGA的六自由度机器人机械手臂的插补控制系统研究基于FPGA的六自由度机器人机械手臂的插补控制系统研究摘要:机器人技术的发展日新月异,提高工作效率和精度成为了人们的共同追求。
本文旨在研究基于FPGA的六自由度机器人机械手臂的插补控制系统,通过对机械手臂的建模和控制方法的研究,实现机械手臂在多个点之间的高效连续运动。
利用FPGA技术的高速并行计算能力,插补控制系统能够实时生成流畅的插补路径,并通过驱动电机控制机械手臂的关节运动,使机械手臂完成复杂的工作任务。
关键词:FPGA;机器人;插补控制系统;六自由度;机械手臂1.引言机器人技术是现代科技的重要组成部分,广泛应用于工业生产、医疗保健、军事等领域。
机器人的关键组成部分之一是机械手臂,它具备多个自由度的关节,通过控制这些关节的运动,实现对物体的抓取、搬运等功能。
插补控制系统是机械手臂控制的关键,能够实现机械手臂在空间中的任意位置之间的连续运动。
2.六自由度机械手臂建模六自由度机械手臂是指机械手臂具备6个自由度的关节,分别控制机械手臂在空间中的位移和姿态。
将机械手臂建模为刚体链,并通过欧拉角描述机械手臂的姿态,可以得到机械手臂的运动学和动力学方程。
通过研究和分析机械手臂的运动学和动力学特性,可以为插补控制系统的设计和实现提供依据。
3.FPGA在机械手臂控制中的应用FPGA是一种集成电路芯片,具备高速并行计算和可编程性的特点。
在机械手臂控制中,FPGA可以实现插补算法的高效计算,并通过驱动电机控制机械手臂的关节运动。
FPGA的可编程性使得插补控制系统具有良好的灵活性和可拓展性,能够在不同场景下实现机械手臂的准确控制。
4.插补控制系统设计插补控制系统设计是机械手臂控制的核心,它包括插补算法的设计和实现。
在机械手臂的连续运动中,插补算法可以根据起点和终点之间的插补路径,实时生成下一时刻机械手臂的位置和速度指令。
常用的插补算法有线性插补算法、样条曲线插补算法等。
基于Arduino的CoreXY结构写字机器人设计
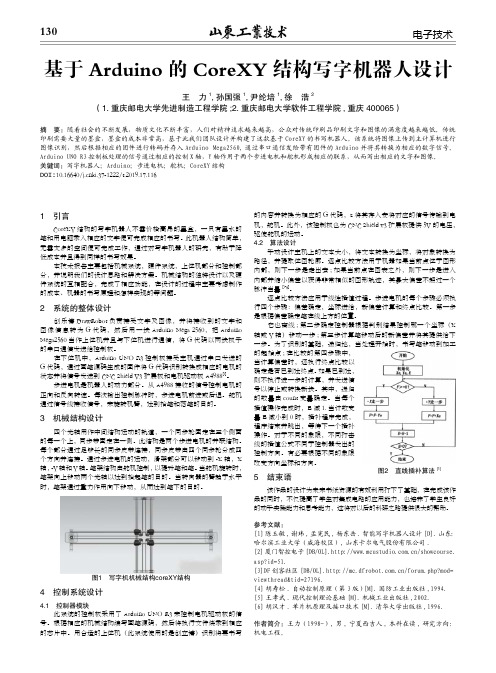
130电子技术1 引言 CoreXY 结构的写字机器人不需价格高昂的墨盒,一只有墨水的笔和用电脑录入相应的文字便可完成相应的书写。
此机器人结构简单,无需太多的空间便可完成工作,通过对写字机器人的研究,有助于降低成本并且得到同样的书写效果。
本技术报告主要包括机械系统,硬件系统,上位机部分和控制部分,并说明我们的设计思路和解决方案。
机械结构的独特设计以及硬件系统的互相配合,完成了相应功能,在设计的过程中主要考虑制作的成本、机器的书写原理和怎样实现的等问题。
2 系统的整体设计 创乐博DrawRobot 负责接受文字及图像,并将接收到的文字和图像信息转为G 代码,然后用一块Arduino Mega 2560,把Arduino Mega2560当作上位机并且与下位机进行通信,将G 代码以两块板子的串口通信发送给控制板。
在下位机中,Arduino UNO R3控制板接受主机通过串口发送的G 代码,通过画笔源码生成的固件将G 代码识别转换成相应的电机的状态并将信号发送到CNC Shield V3扩展板和电机驱动板A4988[1]。
步进电机是机器人的动力部分。
从A4988接收的信号控制电机的正向和反向转速。
每次输出控制脉冲时,步进电机前进或后退。
舵机通过信号线接收信号,来旋转机臂,达到抬笔和落笔的目的。
3 机械结构设计 四个光轴用作中间结构运动的轨道,一个同步轮固定在三个侧面的每一个上,同步带固定在一侧。
此结构是两个步进电机的并联结构。
每个部分通过足够长的同步皮带连接,同步皮带由四个同步轮分成四个方向并连接。
通过步进电机的运动,滑架部分可以移动到-X 轴,X 轴,-Y 轴和Y 轴。
笔架结构由舵机控制,以提升笔和笔。
当舵机旋转时,笔架向上移动两个光轴以达到抬起笔的目的。
当转向器的臂趋于水平时,笔架通过重力作用向下移动,从而达到笔下的目的。
基于Arduino 的CoreXY 结构写字机器人设计王 力1,孙国强1,尹纶培1,徐 浩2(1.重庆邮电大学先进制造工程学院;2.重庆邮电大学软件工程学院,重庆400065)摘 要:随着社会的不断发展,物质文化不断丰富,人们对精神追求越来越高,公众对传统印刷品印刷文字和图像的满意度越来越低。
机器人控制电路设计
2.1 超声波式传感器 ..................................................................................................................................10 2.1.1 超声波传感器工作原理 ..........................................................................................................10 2.1.2 超声波传感器的局限性 ..........................................................................................................11
3.2.1 运动控制系统概述 ..................................................................................................................18 3.2.2 运动控制系统实现方式 ..........................................................................................................18
1.2.1 国外移动机器人的发展状况....................................................................................................7 1.2.2 国内研制的几种移动机器人....................................................................................................8 1.3 本课题的意义和主要研究内容 ...........................................................................................................8
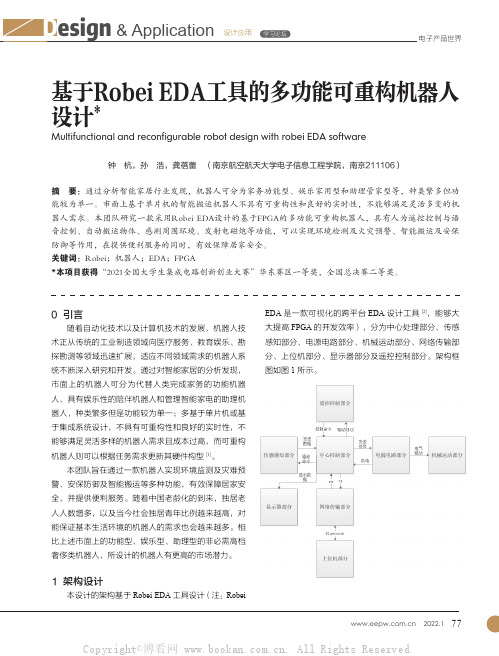
基于Robei EDA工具的多功能可重构机器人设计
5 图像处理
图像处理功能由 CCD 基于 FPGA 实现,主要有两
种功能:轨迹识别及显示、复杂循迹。以下将详细介绍
各个功能的实现。
5.1 轨迹识别及显示
传感系统中的 CCD 模块使用 FPGA 实现,本功能
基于 FPGA 驱动 TS1401 线性 CCD 采集轨迹信息二值
化后输出至上位机,以显示轨迹。
4 算法系统
4.1 机器人运动算法 本作品设计的机器人运动部分采用 4WD 的麦克纳
姆轮,每个麦克纳姆轮上有若干倾斜 45° 的小轮子,在 转动时产生相比机器人倾斜 45° 的摩擦力,4 个轮胎转 动配合即可实现平移、原地旋转等运动。其运动原理如 图 5 所示,其中红色代表轮子向前转,蓝色代表轮子向 后转。
Design & Application 设计应用 学习论坛
电子产品世界
基于Robei EDA工具的多功能可重构机器人 设计*
Multifunctional and reconfigurable robot design with robei EDA software
钟 杭,孙 浩,龚蓓蕾 (南京航空航天大学电子信息工程学院,南京211106)
机器人轮胎选用麦克纳姆轮。由于独特的机械结构, 4 个麦克纳姆轮通过矢量相加可实现机器人平移、原地 旋转等特殊运动。 3.4 电磁炮部分
该部分主要包含逆变升压模块、继电器模块、超级 电容模块和电磁线圈模块。
首先从继电器模块中引出两根信号线给 FPGA, FPGA 可根据手柄和语音控制继电器模块闭合张开以控 制 12 V 电源,通过逆变升压模块给超级电容充电,然 后控制继电器将 12 V 电源断开,此时电能被存储在超 级电容之中。然后再次由 FPGA 控制电磁线圈闭合,使 电能从电容中释放,此时变化的电流通过线圈生成磁场。 根据法拉第电磁感应定律和楞次定律,线圈中将产生排 斥方向的洛伦兹力带动炮管中的金属弹射出。为了保护 电路和隔离,使用可控硅和续流二极管等器件。
智能灭火机器人毕业设计论文

智能灭火机器人摘要文章对消防机器人进行了研究。
介绍了消防机器人的背景并简单描述系统硬件、光电传感器和火焰传感器的工作原理,并附以电路图加以说明,通过传感器连接电压比较器输出电平由M F13处理实现寻找火源。
最后由火焰传感器测距输入单片机实现停车并输出信号控制继电器闭合从而控制风扇灭火。
论文详细阐述了程序流程和实现过程。
此设计以数字集成电路技术为基础并以单片机技术为核心。
依据传感器的信号传入单片机实现各种指令处理。
小车在接近火源的过程中左右波动前进,躲避障碍物,最后找到火源打开风扇灭火。
关键词单片机;光电传感器;灭火装置;复眼目录1前言 (3)2机器人的相关概论 (6)2.1机器人的发展 (6)2.2本课题要研究或解决的问题和拟采用的研究手段 (7)3硬件 (8)3.1机器人外观操作面板介绍 (8)3.2稳压板,灰度检测传感器 (9)3.3光电传感器,复眼 (10)3.4执行机构 (11)4软件电路设计 (12)4.1软件总体设计方案 (13)4.2v j c软件介绍 (14)4.3子程序 (16)4.4硬件电路软件电路 (22)5总结 (25)6参考文献 (26)7源程序 (27)前言目前由于人们的防火意识比较差,生活中火灾频发,消防战士在灭火中牺牲宝贵生命的事件不在少数,迫切要求机器代替人去执行灭火任务。
针对这个问题,前人已经做了很多的研究,有基于M S P430的灭火小车,能实现灭火功能。
还有的是人为地控制机器人的活动和灭火,这样使得不得不靠人来控制,浪费人力资源,不能很好的实现灭火的效果。
此设计在前人研究的基础上,通过不断地学习相关的知识,力求对消防机器人设计达到更深的了解和研究,促进消防机器人在火灾中的应用并推广在相关领域的研究,使消防研究工作不断向前发展,具有很大的学术价值。
在未来智能化和机械化的世界中,尤其是在消防事业中,一款好的机器的使用能够达到事半功倍的效果。
消防机器人的应用前景非常明朗。
PLC在智能机器人技术中的应用

PLC在智能机器人技术中的应用随着科技的迅猛发展,智能机器人已成为现代工业生产领域中不可或缺的一部分。
而PLC(可编程逻辑控制器)作为自动化控制领域中的关键技术之一,其在智能机器人技术中起到了重要的作用。
本文将以PLC在智能机器人技术中的应用为主线,介绍PLC的基本原理和在智能机器人中的各种应用场景。
第一部分:PLC基本原理及其在智能机器人中的地位PLC是以集成电路为核心,内部具有多个通用输入输出端口的控制器,同时具备逻辑运算、定时控制、计数控制等功能。
PLC具有高可靠性、易扩充、操作简单等特点,在自动化控制领域中应用广泛。
PLC在智能机器人技术中的应用主要体现在其作为智能机器人的控制中枢。
通过PLC,智能机器人能够根据预设的程序,对各种传感器和执行器进行控制和调度,实现精确的动作和操作。
第二部分:PLC在智能机器人中的应用场景1. 机械臂控制机械臂是智能机器人中关键的执行元件之一,而PLC则是机械臂控制的核心。
通过PLC的逻辑运算和精准的定时控制,可以实现机械臂的准确定位、抓取、放置等动作。
PLC还可以根据不同的工作需求,灵活调整机械臂的动作序列和速度,提高机械臂的操作效率和稳定性。
2. 视觉识别和处理PLC与视觉系统的结合,可以使智能机器人具备视觉识别和处理的能力。
通过连接摄像头和PLC,智能机器人可以实时获取外部环境的图像信息,并进行分析、识别。
在工业生产中,智能机器人可以通过PLC对产品进行质量检测、尺寸测量等任务,从而实现自动化生产和质量控制。
3. 协调动作和路径规划PLC还可以实现多个执行元件的协调动作和路径规划。
例如,在装配线上,智能机器人可以通过PLC控制多个执行元件的运动,使其协同工作,完成产品的组装任务。
同时,PLC还可以根据预设的路径规划算法,实现智能机器人在复杂环境中的自主导航和避障等功能。
4. 系统监控和故障检测PLC在智能机器人中还承担着系统监控和故障检测的重要任务。
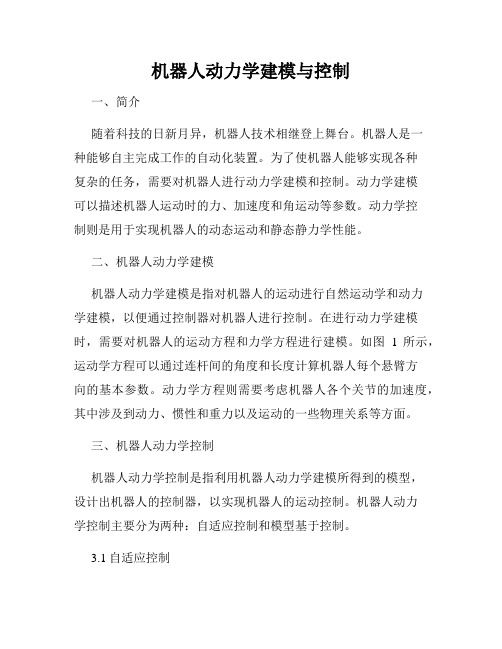
机器人动力学建模与控制
机器人动力学建模与控制一、简介随着科技的日新月异,机器人技术相继登上舞台。
机器人是一种能够自主完成工作的自动化装置。
为了使机器人能够实现各种复杂的任务,需要对机器人进行动力学建模和控制。
动力学建模可以描述机器人运动时的力、加速度和角运动等参数。
动力学控制则是用于实现机器人的动态运动和静态静力学性能。
二、机器人动力学建模机器人动力学建模是指对机器人的运动进行自然运动学和动力学建模,以便通过控制器对机器人进行控制。
在进行动力学建模时,需要对机器人的运动方程和力学方程进行建模。
如图1所示,运动学方程可以通过连杆间的角度和长度计算机器人每个悬臂方向的基本参数。
动力学方程则需要考虑机器人各个关节的加速度,其中涉及到动力、惯性和重力以及运动的一些物理关系等方面。
三、机器人动力学控制机器人动力学控制是指利用机器人动力学建模所得到的模型,设计出机器人的控制器,以实现机器人的运动控制。
机器人动力学控制主要分为两种:自适应控制和模型基于控制。
3.1自适应控制自适应控制是基于机器人动力学模型与集成电路技术发展而产生的。
自适应控制的设计思想是:利用控制输入与机器人运动状态的反馈信息进行自适应修正,以实现机器人的运动控制。
自适应控制系统的应用使得机器人的动态特性及其控制性能得到了显著提高。
3.2模型基于控制模型基于控制是指设计一种基于机器人动力学模型的控制器,以实现机器人的精密控制和优化控制。
该控制器可以是线性的或非线性的控制器,其设计过程一般采用PID控制器或者专用控制算法。
模型基于控制的控制器能够实现机器人的运动控制与工作控制,从而提高机器人的控制精度和控制稳定性。
四、机器人动力学建模与控制的应用机器人动力学建模与控制在航空、军事、制造、自动化等领域应用广泛。
例如,在航空领域中,机器人动力学建模与控制可以用于设计和制造飞行器零部件,提高飞行器的控制精度和稳定性;在军事领域中,机器人动力学建模与控制可以用于制造远程控制的侦察机器人、无人机等;在制造领域中,机器人动力学建模与控制可以用于提高制造系统的控制精度和产品质量;在自动化领域中,机器人动力学建模与控制可以用于机器人控制系统的自主响应和自适应识别。
基于PLC的工业机械手运动控制系统设计

基于PLC的工业机械手运动控制系统设计一、本文概述随着工业自动化的快速发展,工业机械手在生产线上的应用越来越广泛。
作为实现自动化生产的关键设备,工业机械手的运动控制系统设计至关重要。
本文旨在探讨基于可编程逻辑控制器(PLC)的工业机械手运动控制系统设计,通过对PLC技术原理及其在工业机械手控制中的应用进行深入分析,提出一种高效、稳定的运动控制方案。
本文首先介绍了工业机械手及PLC的基本概念,然后详细阐述了基于PLC的工业机械手运动控制系统的硬件组成和软件设计,包括PLC的选型、输入输出电路设计、运动控制程序设计等。
通过实际案例验证了本文所提设计方案的可行性和有效性。
本文旨在为工程师和技术人员提供一套完整的基于PLC的工业机械手运动控制系统设计方案,为工业自动化领域的发展做出贡献。
二、PLC基础知识PLC,即可编程逻辑控制器(Programmable Logic Controller),是一种专为工业环境设计的数字运算电子系统,用于控制各种类型的机械设备或生产过程。
PLC采用可编程的存储器,用于在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式或模拟式的输入/输出控制各种类型的机械或生产过程。
通用性强:PLC产品已经标准化、系列化、模块化,配备有品种齐全的各种硬件装置供用户选用,用户能灵活方便地进行系统配置,组成不同功能、不同规模的系统。
可靠性高:PLC采用大规模集成电路技术,严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性。
PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息。
编程简单:PLC的编程语言易于为工程技术人员所接受。
梯形图语言的图形符号与表达方式和继电器电路图相当接近,只用PLC的少量开关量逻辑控制指令就可以方便地实现继电器电路的功能。
维护方便:PLC的故障率很低,且有完善的自诊断和显示功能。
当系统发生故障时,能及时地查出故障的原因,给出提示,使维修人员能及时排除故障。
面向智能机器人技术的集成电路设计
面向智能机器人技术的集成电路设计哎呀,说起“面向智能机器人技术的集成电路设计”,这可真是个让人兴奋又有点烧脑的话题。
我还记得有一次,我去参加一个科技展览。
在那里,我看到了各种各样神奇的智能机器人,有的能跳舞,有的能跟人对话,还有的能帮着做家务。
当时我就想,这些小家伙们能这么厉害,背后肯定离不开精妙的集成电路设计。
集成电路设计就像是智能机器人的大脑中枢,决定着它们能做什么、能做到多好。
对于智能机器人技术来说,集成电路设计可不是一件简单的事儿。
它需要把一堆复杂的电子元件和线路,巧妙地组合在一起,让机器人能够准确地感知周围环境、快速地处理信息,然后做出恰当的反应。
比如说,一个负责打扫卫生的智能机器人,它得有能够检测灰尘和杂物的传感器,这就需要集成电路来接收和处理这些传感器传来的信号。
然后,根据这些信号,它还得指挥机械臂去清扫,这又得靠集成电路来精准控制电机的转动。
这就像是一个精心编排的舞蹈,每个动作都得恰到好处,不然这机器人可就乱套啦。
要设计出这样厉害的集成电路,可不是拍拍脑袋就能行的。
工程师们得先了解智能机器人的各种需求,就像厨师要知道食客的口味一样。
然后,他们要用各种专业的软件和工具,一点点地画出电路的蓝图。
这过程中,一个小错误都可能导致整个系统出问题,所以得特别细心。
而且,随着技术的不断进步,集成电路也得不断升级。
以前,可能一个简单的芯片就能应付,现在可不行啦。
智能机器人要处理的任务越来越复杂,对集成电路的性能要求也就越来越高。
比如说,要让机器人能够识别更复杂的图像和声音,就得让集成电路有更强的计算能力和更快的传输速度。
还有啊,集成电路的制造工艺也很关键。
就像盖房子,不仅设计要好,材料和施工也不能马虎。
现在的集成电路制造工艺越来越精细,从微米级到纳米级,这对制造设备和技术的要求简直高得吓人。
但也正是因为有了这些先进的工艺,我们才能做出更小、更强大的集成电路,让智能机器人变得更聪明、更灵活。
再想想未来,当智能机器人技术越来越成熟,集成电路设计也会面临更多的挑战和机遇。
厚膜混合集成电路中的机器人与智能制造技术研究
厚膜混合集成电路中的机器人与智能制造技术研究引言:近年来,随着人工智能技术的不断发展,机器人在智能制造领域的应用呈现出了越来越广阔的前景。
厚膜混合集成电路作为一种先进的微电子技术,具有尺寸小、功耗低等优势,为机器人的发展提供了广阔的空间。
本文将针对厚膜混合集成电路中机器人与智能制造技术的研究进行探讨,以期为智能制造领域的发展提供有益的指导和借鉴。
一、厚膜混合集成电路中的机器人技术研究1. 自主导航技术在厚膜混合集成电路中,机器人的自主导航技术是关键的研究内容之一。
自主导航技术使得机器人能够通过对环境感知和数据处理,实现自主的路径规划和导航。
通过在厚膜混合集成电路中集成传感器、控制器和导航算法等元件,可以实现机器人的精准导航,提高工作效率和准确性。
2. 人机交互技术人机交互技术是指机器人与人类之间的信息交流和工作协同技术。
通过在厚膜混合集成电路中集成传感器、摄像头和人工智能算法等元件,机器人可以实现与人类的智能交互。
例如,在智能制造领域,机器人可以与操作员进行实时的语音交流和手势识别,从而实现更加高效和智能化的生产过程。
3. 运动控制技术运动控制技术是机器人技术的核心之一,也是厚膜混合集成电路中机器人技术的重要方面。
通过在厚膜混合集成电路中集成电机驱动器和运动控制系统等元件,机器人可以实现高精度、高速度的运动控制。
这将极大地提高机器人的作业速度和精确度,并且增强机器人对于不同工作环境的适应能力。
二、厚膜混合集成电路中的智能制造技术研究1. 自动化生产技术厚膜混合集成电路中的智能制造技术可以帮助实现生产过程的自动化。
通过在生产线上集成厚膜混合集成电路技术,可以实现产品的自动化装配、检测和包装等工作,大大提高生产效率和质量。
此外,通过在厚膜混合集成电路中加入自动化控制系统和智能算法,还能够实现生产过程的即时监控和优化。
2. 质量控制技术在智能制造领域,质量控制是非常重要的一个环节。
厚膜混合集成电路中的智能制造技术可以为质量控制提供有效的解决方案。
基于集成电路设计的高性能处理器研发
基于集成电路设计的高性能处理器研发随着科技的快速发展,电子设备越来越普及,人们对处理器性能的需求也越来越高。
为了满足这个需求,研发人员不断努力,基于集成电路设计的高性能处理器应运而生。
基于集成电路设计的高性能处理器(High-performance Processor based on Integrated Circuit Design)是指通过集成电路技术,将处理器的各个功能模块相互连接并组合在一起,以实现高性能处理能力和卓越的计算速度。
首先,高性能处理器的研发需要充分理解处理器的架构和原理。
处理器是计算机中的核心组件,它承担着数据的处理和计算任务。
在研发过程中,研发团队需要对处理器的各个模块,如运算器、控制器等进行深入理解,并根据需求进行改进和优化。
同时,研发团队也需要对处理器的指令集进行研究和优化,以提升处理器的执行效率和处理能力。
其次,高性能处理器的集成电路设计需要注重硬件与软件的结合。
在设计过程中,研发团队需要充分考虑处理器的硬件架构和软件编程模型的适配性。
只有硬件与软件的良好结合,才能发挥处理器的最大潜力。
此外,研发团队还需要注重处理器的功耗和热量管理,在高性能处理器的设计中,通过优化电路结构和算法,降低功耗和热量产生,提高处理器的能效比。
高性能处理器的研发还需要注重算法的优化。
处理器的性能不仅仅取决于硬件架构,也受到算法的影响。
在研发过程中,研发团队需要针对不同的应用场景,设计和优化相应的算法。
通过优化算法,可以提高处理器的计算速度和执行效率,满足不同应用领域对处理器性能的需求。
此外,高性能处理器的研发还需要注重系统的可靠性和稳定性。
在集成电路设计中,研发团队需要考虑处理器的可扩展性和容错性。
处理器在运行过程中,需要能够处理各种异常情况,保证系统的稳定性和可靠性。
同时,研发团队还需要进行严格的测试和验证,确保处理器在正常和极端条件下都能正常运行。
在高性能处理器的研发过程中,研发团队需要依托先进的集成电路技术和设计工具。
浅议PLC的概念与意义

浅议PLC的概念与意义PLC即可编程控制器(Programmable logic Controller,是指以计算机技术为基础的新型工业控制装置。
在1987年国际电工委员会(International Electrical Committee)颁布的PLC标准草案中对PLC做了如下定义:“PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
PLC 及其有关的外围设备都应该按易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。
”PLC的特点2.1可靠性高,抗干扰能力强高可靠性是电气控制设备的关键性能。
PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性。
例如三菱公司生产的F系列PLC平均无故障时间高达30万小时。
一些使用冗余CPU的PLC的平均无故障工作时间则更长。
从PLC的机外电路来说,使用PLC构成控制系统,和同等规模的继电接触器系统相比,电气接线及开关接点已减少到数百甚至数千分之一,故障也就大大降低。
此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息。
在应用软件中,应用者还可以编入外围器件的故障自诊断程序,使系统中除PLC以外的电路及设备也获得故障自诊断保护。
这样,整个系统具有极高的可靠性也就不奇怪了。
2.2配套齐全,功能完善,适用性强PLC发展到今天,已经形成了大、中、小各种规模的系列化产品。
可以用于各种规模的工业控制场合。
除了逻辑处理功能以外,现代PLC大多具有完善的数据运算能力,可用于各种数字控制领域。
近年来PLC的功能单元大量涌现,使PLC渗透到了位置控制、温度控制、CNC等各种工业控制中。
加上PLC通信能力的增强及人机界面技术的发展,使用PLC组成各种控制系统变得非常容易。
人工智能集成电路设计与实现
人工智能集成电路设计与实现人工智能(Artificial Intelligence,简称AI)正成为科技领域中的热门话题,其在各个领域的应用也越来越广泛。
其中,人工智能集成电路设计与实现是一个关键领域,它涉及到了电子工程和计算机科学的交叉,为人工智能技术的发展提供了基础和支持。
本文将探讨人工智能集成电路设计与实现的重要性、关键技术和挑战。
人工智能集成电路设计与实现的重要性不言而喻。
随着人工智能技术的快速发展,对高性能、低功耗的硬件实现需求日益增加。
传统的通用计算器无法满足人工智能算法复杂度和计算量大的特点。
因此,为了提高人工智能算法的执行效率和能效,研究人员们开始将人工智能算法与集成电路设计相结合。
在人工智能集成电路设计与实现中,关键的一环是芯片设计。
芯片设计是将人工智能算法转化为硬件电路的过程。
首先,在设计阶段,研究人员需要根据算法的需求设计相应的电路逻辑来实现目标功能。
其次,在电路布局阶段,需要将电路布置在芯片上,以使电路之间的物理连线满足电信号的传输要求。
最后,在验证阶段,对设计的芯片进行功能和性能的验证。
这个过程需要借助计算机辅助设计软件和硬件描述语言。
除了芯片设计,人工智能集成电路设计与实现还涉及到了相应的电源供应、物理封装和测试等环节。
其中,电源供应模块负责将合适的电源电压和电流引入芯片,以保证芯片正常工作;物理封装模块则将芯片封装在适当的外壳中,保护芯片不受外界环境的影响;测试模块则通过对芯片进行各种功能和性能的测试,以确保芯片的质量和可靠性。
在人工智能集成电路设计与实现的过程中,研究人员还面临着一些挑战。
首先,人工智能算法的复杂性要求芯片设计能够支持更高的计算与存储能力。
这就要求设计人员在电路的面积、功耗和可靠性之间进行权衡,以实现最佳方案。
其次,人工智能算法的实时性要求芯片设计能够在有限时间内完成大量的计算任务。
这对芯片设计的并行性和并发性提出了更高的要求。
最后,人工智能算法的灵活性要求芯片设计能够支持算法参数的动态调整和算法结构的变化。
集成电路设计 计算机控制技术

集成电路设计计算机控制技术集成电路设计是一门综合应用计算机控制技术的学科,旨在研究如何将电子元器件和电路集成在一起,实现复杂的功能。
本文将从集成电路设计和计算机控制技术两个方面进行阐述,介绍它们的基本概念、应用领域以及相互关系。
一、集成电路设计集成电路是指将电子元器件(如电阻、电容、晶体管等)和电路(如逻辑门、放大器等)集成在一块半导体芯片上的技术。
它的出现极大地推动了电子技术的发展,使得电子设备越来越小型化、高性能化。
集成电路设计是指通过软件工具对集成电路进行设计,包括电路原理图设计、电路模拟验证、电路布局布线等。
它是电子工程师进行电路设计的重要手段,可以大大提高设计效率和准确性。
集成电路设计的应用非常广泛,涵盖了各个领域,如通信、计算机、医疗、汽车等。
在通信领域,集成电路设计可以用于设计各种无线通信模块,如手机芯片、WiFi模块等;在计算机领域,集成电路设计可以用于设计中央处理器(CPU)、图形处理器(GPU)等核心芯片;在医疗领域,集成电路设计可以用于设计各种医疗仪器,如心电图仪、血压仪等;在汽车领域,集成电路设计可以用于设计各种汽车电子系统,如发动机控制单元(ECU)、车载娱乐系统等。
二、计算机控制技术计算机控制技术是指利用计算机对工程设备、生产过程或系统进行控制和管理的技术。
它通过采集和处理各种传感器信号,实现对设备或系统的自动化控制。
计算机控制技术的核心是控制算法和控制器。
控制算法是指根据控制对象的特性和要求,设计出一系列数学模型和控制策略,用于实现对对象的精确控制。
控制器是指利用计算机硬件和软件实现控制算法的装置,包括传感器、执行器和控制器主机等。
计算机控制技术的应用范围非常广泛。
在工业自动化领域,计算机控制技术可以用于控制生产线、机器人等设备,提高生产效率和质量;在交通运输领域,计算机控制技术可以用于交通信号灯控制、智能交通系统等,提高交通流量的效率和安全性;在家居领域,计算机控制技术可以用于智能家居系统,实现对家电、照明、安防等设备的远程控制和自动化管理。
微型机器人
微型机器人的发展与展望摘要:微型机器人是微电子机械系统的一个重要分支, 由于它能进入人类和宏观机器人所不及的狭小空间内作业, 近几十年来受到了广泛的关注。
本文首先给出了近年来国内外出现的几种微型机器人, 在分析了其特点和性能的基础上, 讨论了目前微型机器人研究中所遇到的几个关键问题, 并且指出了这些领域未来一段时间内的主要研究和发展方向。
关键词:微型机器人; 关键技术;应用**前言机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。
微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。
微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。
MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。
微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。
微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点。
然而,微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合。
微型机器人的研究,是一个新颖又具有重大实际意义和挑战性的课题。
该技术有利于实现真正意义上的微小系统,充分展示了微小系统的巨大魅力;而且建立微型机器人需要更为微小的驱动器、执行器、传感器、处理器等,由此展开的对微型机器人本体加工和微部件的研制,将有利于实现更高意义上的微系统集成,推动MEM S技术继续前进。
1 微型机器人的发展概况近年来,采用MEMS技术的微型卫星、微型飞行器和能进入狭窄空间的微型机器人展示了诱人的应用前景和军民两用的战略意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于集成电路技术的机器人控制器设计
机器人技术是现今科技领域的一个非常热门的研究方向,它对人类的生活和工
作带来了很大的影响。
机器人被广泛应用在工业生产、医疗卫生、军事、航空航天等领域,为人类带来了极大的便利和效益。
机器人技术的发展离不开机器人控制器,而基于集成电路技术的机器人控制器设计也越来越受到人们的关注。
本文将围绕着基于集成电路技术的机器人控制器进行讨论。
1. 机器人控制器的作用及要求
机器人控制器是机器人系统中的核心部件,其作用是负责控制机器人的行动。
因此,机器人控制器的设计要求必须高。
机器人控制器必须能够精准控制机器人的运动,保证机器人能够各项工作功能都能够得到实现。
同时,机器人控制器还需要具备高精度、快速响应和可靠性等特点,以确保机器人的工作效率和稳定性。
2. 集成电路技术在机器人控制器设计中的应用
随着集成电路技术的不断发展,集成电路已经广泛应用于机器人控制器的设计中。
利用集成电路技术可以实现小型化、高效率、低功耗和可靠性强的机器人控制器。
集成电路的应用不仅可以提高机器人控制器的性能,而且可以减少设备的体积和重量,方便机器人的移动和实现对机器人进行更加便捷的控制。
3. 基于集成电路的机器人控制器的具体设计
基于集成电路技术的机器人控制器的设计需要考虑多方面的问题,具体设计步
骤包括芯片选型、系统框架设计、硬件设计和软件算法实现等。
在芯片选型时需要选择性能更加卓越的芯片来满足机器人控制器的要求;在系统框架设计时需要完善的画出机器人控制器的功能结构图,确定各个模块之间的联系;在硬件设计时需要考虑到机器人控制器的大小和结构,尽可能地将其小型化,提高其可移动性;在软件算法实现时,需要利用现代计算机算法来实现更为高效、准确且可靠的运动控制和运动规划。
4. 集成电路技术在机器人控制器设计中的优势和不足
基于集成电路技术的机器人控制器在效率和可靠性方面具有卓越的优势,其利
用集成电路的小型化、高效率、低功耗、可靠性强等特点,能够更加轻松、快速完成机器人控制任务。
同时,如果对于芯片选型、系统框架设计、硬件设计和软件实现等方面的控制和管理不够严格,也会存在性能下降引发的问题,例如,集成电路的制作周期越来越短、芯片的温度敏感度高等问题,容易影响机器人控制器的可靠性和灵活性。
总之,基于集成电路技术的机器人控制器设计具有很好的前景和应用空间。
未
来随着集成电路技术的不断发展和创新,机器人控制器的设计也将会变得更加精准、高效、稳定和真实。
如果能够采取一种科学的、系统的、高效的集成电路技术的机器人控制器设计方案会使得人们在使用过程中的应用更加安全、可靠和方便。