3—RPS并联平台机构的位姿研究
飞机装配中基于3-RPS的并联机构法向调整算法
飞机装配中基于3-R P S 的并联机构法向调整算法邹冀华1 周万勇1,2韩先国21.北京航空制造工程研究所,北京,1000242.北京航空航天大学,北京,100083摘要:在飞机壁板柔性装配和钻铆时,采用典型的3-R P S 并联机构进行自动调姿,该机构的末端执行器要求钻铆头沿孔位处的蒙皮法向进给㊂为了解决该法向调整问题,先对3-R P S 并联机构动平台位姿进行建模描述,再在此基础上提出法向调整的求解算法㊂结合实例说明了该算法完全具有实际工程应用能力,且该法向调整算法还可以推广应用于定位㊁调姿等飞机数字化制造及装配工作中㊂关键词:装配;3-R P S 并联机构;法向调整;动平台中图分类号:T P 242 文章编号:1004 132X (2011)05 0557 04N o r m a l A d j u s t i n g A l g o r i t h mo f a 3-R P SP a r a l l e lM e c h a n i s mi nA i r p l a n eA s s e m b l yZ o u J i h u a 1 Z h o u W a n y o n g 1,2 H a nX i a n gu o 21.B e i j i n g A e r o n a u t i c a lM a n u f a c t u r i n g T e c h n o l o g y R e s e a r c h I n s t i t u t e ,B e i j i n g,1000242.B e i j i n g U n i v e r s i t y o fA e r o n a u t i c s a n dA s t r o n a u t i c s ,B e i j i n g,100083A b s t r a c t :W h e n t h ew a l l p a n e l sw e r e f l e x i b l y a s s e m b l e d ,d r i l l e d o r r i v e t t e d ,a t y p i c a l 3-R P S p a r -a l l e lm e c h a n i s m w a s u s e d f o r s e l f a d j u s t i n g t h e p o s i t i o n a n do r i e n t a t i o n .A n d t h e e n d e f f e c t o r r e q u e s -t e d t h e a i g u i l l ew o r k i n g t h r o u g h t h e s k i n n o r m a l d i r e c t i o n f r o mt h e h o l e .F o r r e s o l v i n g t h e n o r m a l a d -j u s t i n gp r ob l e m ,t h e p o s i t i o na n do r i e n t a t i o nm o d e l i n g w a s f i r s t l y a n a l y z e d a n dd e sc r i b ed f o r t h em o -b i le p l a tf o r mo f a 3-R P S p a r a l l e lm e c h a n i s m.A n d t h e n t h e n o r m a l a d j u s t i ng s o l u t i o n a l go r i t h m w a s b r o u g h t f o r w a r d .F i n a l l y ,t h r o u g h a n e x a m p l e t h em e t h o d i s s h o w n t h a t i t h a s t h e p r a c t i c a l e n g i n e e r -i n g a p p l i c a t i o n c a p a b i l i t y .A n d t h i s n o r m a l a d j u s t i n g a l g o r i t h mc a nb e e x t e n d e d t o t h e f u r t h e r a i r p l a n e d i g i t a lm a n u f a c t u r i n g a n d a s s e m b l y s u c ha s p o s i t i o n i n g a n d a t t i t u d e r e gu l a t i o n .K e y wo r d s :a s s e m b l y ;3-R P S p a r a l l e lm e c h a n i s m ;n o r m a l a d j u s t i n g ;m o b i l e p l a t f o r m 收稿日期:2010 02 230 引言飞机装配过程就是实现定位㊁调整㊁连接等一系列操作的工作过程㊂现代飞机先进装配技术己完全不同于传统的模式,实现了飞机装配过程中的数字化㊁自动化㊁柔性化㊁信息化和模块化㊂其中并联机构在飞机装配中的应用也越来越广泛[1]㊂基于3-R P S 的并联机构是一种典型的运动机构[2],它可应用于飞机装配的众多环节中,并能够大幅度提高装配性能和效率㊂与传统飞机生产模式相比,现代飞机生产数量更多,结构设计更加复杂,装配工艺和模式也随之改变,并对飞机产品精度㊁装配效率和装配周期㊁生产成本都有了更高的要求,对装配定位㊁调整等很多环节都要求不断改用自动化㊁模块化和柔性化等技术来实现,而3-R P S 并联机构的自由灵活㊁精确调整的特点可以更好地满足这些要求,因此采用伺服控制自动调整的3-R P S 并联机构在现代飞机装配中具有重要的应用价值㊂1 问题的提出3-R P S 并联机构由动平台㊁静平台和3根可以自由伸缩的连杆构成㊂它可以应用在飞机装配的许多重要环节,如:①装配自动定位调姿平台㊂可实现产品对接时带动装配件精确空间姿态定位;②自动钻铆定位机构㊂用来带动自动钻铆头和精确找准钻铆头法向进给方向;③并联机器人㊂实现更加灵活精准的机械手空间运动和定位[3]等㊂但是,由于具有三自由度的3-R P S 并联机构存在闭环,故其6个运动位姿参数并不完全独立,这使得运动分析相对比较复杂㊂在实际应用中,经常会遇到由于伺服控制和机械结构自身的系统误差导致动平台未能准确运动到位的情况[4‐5],即装配产品㊁钻铆头㊁机械手等末端执行器加装在动平台上,按照预定轨迹和程序控制其运动,但校验最终位置会有微小偏差㊂此时,为了避免这种偏差,需要两个辅助工作:一㊃755㊃是在加装末端执行器的动平台上安装精确测距装置,以获得当前动平台位置与目标位置的空间关系;二是通过算法计算出动平台法向调整的矢量值,并编程传输给伺服控制系统以带动电机运动㊂可见,对3-R P S 并联机构的法向调整算法进行研究是实际应用中的必要环节㊂我们以航空制造中遇到的一个实际问题进行分析,即在一台3-R P S 并联机床的动平台上加装钻铆用的末端执行机构,以便对飞机壁板蒙皮进行钻孔工作,要求末端执行器的钻铆头进给方向垂直于蒙皮表面,即沿钻孔点的蒙皮法向㊂2 3-R P S 并联机构动平台位姿描述如图1所示,设3-R P S 并联平台机构的静平台为B 1B 2B 3,动平台为P 1P 2P 3,它们之间由3根自由伸缩的连杆L 1㊁L 2㊁L 3连接㊂静平台与连杆之间由转动副连接,3个连杆均为移动副,动平台与连杆之间由球面副连接[6]㊂记静平台上3个铰链点为B i (i =1,2,3),动平台上3个铰链点为P i (i =1,2,3),它们分别成等边三角形B 1B 2B 3和P 1P 2P 3,且外接圆半径分别为r 和R ㊂在静平台建立固定坐标系O X Y Z ,原点位于等边三角形B 1B 2B 3的中心,X 轴指向B 1,Y 轴平行于B 2B 3,Z 轴垂直于静平台;在动平台上建立动坐标系P X 'Y 'Z ',原点P 位于等边三角形P 1P 2P 3的中心,X '轴指向P 1,Y '轴平行于P 2P 3,Z '垂直于动平台㊂图1 3-R P S 并联机构示意图因此,B 1㊁B 2㊁B 3在固定坐标系下的坐标分别为:(r ,0,0)㊁(-r 2,3r 2,0)㊁(-r 2,-3r 2,0);P 1㊁P 2㊁P 3在动坐标系下的坐标分别为:(R ,0,0)㊁(-R 2,3R 2,0)㊁(-R 2,-3R 2,0)㊂动坐标系P X 'Y 'Z '的姿态相对于静平台固定坐标系O X Y Z的转换矩阵为T =x i yi z i x P x jy jz j y P x k y kz k z P éëêêêêêùûúúúúú001(1)式中,x m ㊁y m ㊁z m (m =i ,j ,k )为固定坐标系下的方向余弦;(x P ,y P ,zP )为P 点在固定坐标系下的坐标㊂三自由度机构仅有3个参数是独立和可控的,机构动平台上三铰链点P 1㊁P 2㊁P 3的轨迹分别分布在3个垂直面y =0㊁y =-3x ㊁y =3x 内㊂这样,3个约束方程为x j =yi x P =R 2(x i -y j )y P =-Rx üþýïïïïj (2)3-R P S 机构是三自由度机构,z P是完全独立的变量,则已知z P 和其余5个自由度中的2个变量,就可以确定其余3个变量㊂用Z X Z 型欧拉角ψ㊁θ㊁φ表示动平台相对静平台的姿态㊂则此时动平台相对于静平台位姿转换矩阵为[7‐8]T =c ψc φ-s ψc θs φ-c ψs φ-s ψc θc φs ψs θx P s ψc φ+c ψc θs φ-s ψs φ+c ψc θc φ-c ψs θy P s θs φs θc φc θz P éëêêêêêùûúúúúú0001(3)式中,c ψ=c o s ψ;s ψ=s i n ψ;其余类似㊂由上述可得φ=-ψ(4)3 法向调整算法工艺上要求飞机壁板上的制孔要沿该孔中心的法线方向㊂法向调整算法是假设当前加工点的位置是正确的,但方向不是法线方向㊂若要3-R P S 并联机构实现一个加工点不变,则需要将制孔轴线方向调整为蒙皮在该点处的法线方向㊂已知动平台的初始姿态为(ψ0,θ0,φ0),动平台在静平台坐标系下的初始位置为(x 0,y0,z 0),该点是动平台坐标系的原点在静平台上的坐标㊂并设l A ㊁l B ㊁l C ㊁l D 表示4个距离测量仪沿动平台坐标系Z '向的测量值㊂计算得调整后动平台的原点位置为(x 1,y 1,z 1),姿态为(ψ1,θ1,φ1)㊂当将法向调整算法应用在飞机蒙皮法向钻铆过程中时,我们需要对当前末端执行器相对于蒙皮表面的位姿进行确认,即根据前面问题提出时采用的方法,在动平台上安装4个距离测量仪,用它们精确测出动平台上的四点A '㊁B '㊁C '㊁D '到蒙皮表面A ㊁B ㊁C ㊁D 四点的距离,如图2所示㊂蒙皮㊃855㊃表面上该4个点在动平台坐标系中的坐标为(X A ,Y A ,Z A ),(X B ,Y B ,Z B ),(X C ,Y C ,Z C ),(X D ,Y D ,Z D )图2 测距点设置示意图设4个距离测量仪的安装高度一致,为Z h ,则有Z I =l I +Z hI =A ,B ,C ,D 又设蒙皮上该4个测量点在静平台固定坐标系中的坐标为(x A ,y A ,z A ),(x B ,y B ,z B ),(x C ,y C ,z C ),(x D ,y D ,z D)则有x A x B x C x D y A y B y C y D z A z B z C z D éëêêêêêùûúúúúú1111=T X A X B X C X D Y A Y B Y C Y D Z A Z B Z C Z D éëêêêêêùûúúúúú1111事实上,通过4个测量点求蒙皮平面的法线方向是冗余的,用3个即可,之所以使用了4个距离测量装置,是防止有的测量点没有落到蒙皮表面而落到了蒙皮孔里或边缘外㊂由于飞机蒙皮表面在钻铆点附近局部小范围内的曲率较小,故可认作近似小平面㊂这里选A ㊁B ㊁C 三点确定该蒙皮局部平面㊂有A B =(x B -x A ,y B -y A ,z B -z A)A C =(x C -x A ,y C -y A ,z C -z A)蒙皮局部平面的法线方向n 可以用作确定目标姿态(ψ1,θ1,φ1)㊂根据:n =A B ×A C /(|A B ||A C |)=s ψ1s θ1-c ψ1s θ1c θéëêêêùûúúú1可以解出目标姿态ψ1㊁θ1,又由式(4)可得到φ1㊂对角线A C 中点为加工点,其在静平台坐标系下的坐标为(x A +x C 2,y A +y C 2,z A +z C2),可由其在动平台坐标系下的坐标值求得,即:(x A +x C )/2(y A +y C )/2(z A +z C )/2éëêêêêêùûúúúúú1=T 0(X A +X C )/2(Y A +Y C )/2(Z A +Z C )/2éëêêêêêùûúúúúú1其中,T 0可根据(ψ0,θ0,φ0)㊁(x 0,y 0,z 0)和式(3)求得㊂设调整后距离测量仪在蒙皮上的4个测量点在动平台坐标系中的坐标为(X A ,Y A ,Z ),(X B ,Y B ,Z ),(X C ,Y C ,Z ),(X D ,Y D ,Z )Z =l A +l C2+Z h加工点在调整后的动平台坐标系下的坐标为(X A +X C 2,Y A +Y C 2,Z ),则x A +x C 2y A +y C 2z A +z C éëêêêêêêêêùûúúúúúúúú21=T 1X A +X C 2Y A +Y C 2Z éëêêêêêêêùûúúúúúúú1(5)T 1=c ψ1c φ1-s ψ1c θ1s φ1-c ψ1s φ1-s ψ1c θ1c φ1s ψ1s θ1x 1s ψ1c φ1+c ψ1c θ1s φ1-s ψ1s φ1+c ψ1c θ1c φ1-c ψ1s θ1y 1s θ1s φ1s θ1c φ1c θ1z 1éëêêêêêùûúúúúú0001将T 1代入式(5)中即可解出位置坐标(x 1,y1,z 1)㊂4 应用现为某航空企业研制开发了用于某型飞机翼身壁板蒙皮钻铆的3-R P S 并联机床,可以完成自动定位找准待加工孔位㊁调整钻铆方向㊁多功能钻孔与连接等操作㊂其中,对孔位的加工方向即钻铆进给方向进行了算法分析,利用本文提出的法向调整算法进行编程设计,可很好地实现位姿精确调整㊂如图3所示,该机构的特点是,在3根连杆的伸缩运动下,动平台可以进行Z 向平动和绕X ㊁Y 轴的转动(即A 摆㊁B 摆)㊂而沿X 向和Y 向的平动,将靠另外的定位工装辅助实现㊂其中,法向计算调整的整个工作过程分为以下几步:图3 3-R P S 机构模型(自动钻铆并联机床)(1)对动静平台初始标定㊂找到其动平台原点P 相对于静平台的初始位姿(ψ0,θ0,z 0),作为算法程序的输入参数之一,如ψ0=270°,θ0=3°,z 0=1765mm ㊂㊃955㊃(2)将每个距离测量仪到被加工工件表面的实测距离输入到算法程序中,分别为25.32mm㊁25.76mm㊁26.25mm㊁26.00mm㊂(3)根据算法需要知道4个距离测量仪在动平台坐标系P X'Y'Z'中的坐标位置,这个数值需要通过设备初始标定工作进行测量得到㊂(4)通过算法程序,解算出动平台需要调整的偏移量,用坐标原点P处的变化表示,即P点的X Y Z坐标变化值,以及动平台绕X轴和Y轴的转动角度㊂根据以上各步的数据参数,经过解算得到结果:Δx=x1-x0=122.599mm,Δy=y1-y0= -3.074mm,Δz=z1-z0=24.789mm, p u s a i1=ψ1=-183.028°,t h i t a1=θ1=-0.287°㊂该算法和程序已在工程实物样机上进行了模拟验证,并能够进行正确的法向位姿调整,在壁板蒙皮表面上得到了准确的垂直钻孔方向的试验结果㊂5 结语通过以上算法编程计算,可以根据3-R P S 并联机构动平台初始位姿㊁动平台上的4个任意测量点,以及该四点到被加工工件表面的距离长度,得到垂直加工工件时动平台需调整的位移量和偏转角度㊂在构建动平台法向调姿算法过程中,是以所测量蒙皮的中心(即A C的中点)作为钻铆的目标点㊂在实际装配测量过程中,要保证该点是目标点主要取决于两方面因素:一方面是工件(壁板件)本身的制造误差δ1,如壁板蒙皮表面的变形误差;另一方面是机构平台的定位精度误差δ2㊂一般地,壁板孔位误差允许值在1mm左右,而前者δ1可达到0.3mm,后者δ2可达到0.1mm㊂因此,一般的制孔点位能满足钻铆的目标点位精度要求㊂就该算法本身而言,不会产生额外的位置精度误差㊂由于实际算法选用四点中3个测量点的测距数据,所以,在编程中应充分考虑对合理测量点数据的筛选㊂对于工件表面复杂(如有凹陷㊁突变㊁阶差㊁断层等)的情况,距离测量仪的合理测距数据采集与选择方法就更显重要,而对平直或曲率小的大工件表面,该法向调整算法更为适用㊂另外,这种方法不仅可用于加工调整,同样可用于装配定位的柔性平台调姿,或为其他3-R P S机构的动平台法向空间调整计算所借鉴㊂总之,该算法在实际装配工程应用中有着重要的参考意义和实用价值㊂参考文献:[1] Z o u J i h u a,R i a zA,F a nY u q i n g.R e s e a r c hf o rM a-j o r-p a r t sD i g i t a lA s s e m b l y S y s t e mo f L a r g e-s c a l eA i r p l a n e[J].W s e a s T r a n s a c t i o n s o n S y s t e m s,2007,6(2):316‐321.[2] 宋欣,崔振海,韩瑞.3-R P S并联平台机构空间位置分析[J].哈尔滨铁道科技,2003(4):17‐19.[3] 陈学生㊁陈在礼,孔民秀.并联机器人的进展与现状[J].机器人,2002(9):464‐470.[4] S o n g S M,Z h a n g M D.A S t u d y o f R e a c t i o n a lF o r c eC o m p e n s a t i o nB a s e do n T h r e e-D e g r e e-o fF r e e d o m P a r a l l e lP l a t f o r m s[J].Jo fR o b o t i cS y s-t e m,1995,12(12):783‐794.[5] B a s uD,G h o s a l A.S i n g u l a r i t y A n a l y s i s o f P l a t f o r m-t y p eM u l t i-l o o p S p a t i a lM e c h a n i s m[J].M e c h a-n i s ma n d M a c h i n eT h e o r y,1997,32(3):375‐389.[6] 黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,2006.[7] L e e K M,S h a h D K.K i n e m a t i c A n a l y s i so faT h r e e-d e g r e e-o f-f r e e d o mI n-p a r a l l e lA c t u a t e dM a n i p u l a t o r[J].I E E EJ o u r n a l o fR o b o t i c s a n dA u-t o m a t i o n,1998,4(2):354‐360.[8] S o k o l o vA,X i r o u c h a k i sP.D y n a m i c sA n a l y s i so f a3-D O FP a r a l l e lM a n i p u l a t o rw i t h R-P-SJ o i n tS t r u c t u r e[J].M e c h a n i s m a n d M a c h i n e T h e o r y, 2007,42(5):541‐557.(编辑 袁兴玲)作者简介:邹冀华,男,1978年生㊂北京航空制造工程研究所数字化与柔性装配技术研究室高级工程师㊁博士㊂主要研究方向为数字化装配㊁数字化测量和数字化容差分配技术㊂发表论文10余篇㊂周万勇,男,1971年生㊂北京航空制造工程研究所数字化与柔性装配技术研究室高级工程师,北京航空航天大学机械工程及自动化学院博士研究生㊂韩先国,男,1970年生㊂北京航空航天大学机械工程及自动化学院副教授㊁博士㊂㊃065㊃。
3RPS-SPS并联机构的力位混合冗余驱动控制

第 54 卷第 9 期2023 年 9 月中南大学学报(自然科学版)Journal of Central South University (Science and Technology)V ol.54 No.9Sep. 20233RPS-SPS 并联机构的力位混合冗余驱动控制张氢,赵伯伦,陈文韬,秦仙蓉,孙远韬(同济大学 机械与能源工程学院,上海,201804)摘要:为了提升冗余并联机构的运动精度和承载能力,以新型3RPS-SPS 冗余并联机构为对象,研究并联机构的驱动控制策略。
首先,对该并联机构运动学进行研究,根据螺旋理论分析了机构自由度;其次,运用解析法获得并联机构位置反解和位置正解的解析表达式;第三,根据位置反解表达式,求导得到速度、加速度模型,并通过拉格朗日法建立并联机构的动力学模型;最后,提出冗余驱动控制方式下的驱动力分配方法,设计了力位混合控制策略,并搭建了基于Simulink 的联合仿真系统进行仿真实验。
研究结果表明:该机构具有2个转动自由度和1个移动自由度,在2个转动自由度上,机构旋转运动的角度最大误差分别为5.66´10-4 rad 与3.45´10-4 rad ,在移动自由度机构平移运动的位移最大误差为4.01´10-2 mm ;所提出的力位混合控制策略的最大驱动力(66 N)小于传统位置控制策略的最大驱动力(190 N),并且机构驱动支链驱动力在力位混合控制策略下的分配更均衡。
设计的控制策略使3RPS-SPS 并联机构具有了较高的运动精度和较强的承载能力。
关键词:并联机构;冗余驱动;力位混合控制;联合仿真;运动学;动力学中图分类号:TP112 文献标志码:A 开放科学(资源服务)标识码(OSID)文章编号:1672-7207(2023)09-3481-12Force/position hybrid control of 3RPS-SPS redundant parallelmechanismZHANG Qing, ZHAO Bolun, CHEN Wentao, QIN Xianrong, SUN Yuantao(College of Mechanical and Energy Engineering, Tongji University, Shanghai 201804, China)Abstract: In order to improve the motion accuracy and load-bearing capacity of redundant parallel mechanisms, the new 3RPS-SPS redundant parallel mechanism was taken as the research object and the drive control strategy of parallel mechanisms was studied. Firstly, kinematic analysis was conducted on the parallel mechanism, and the freedom degree was analyzed according to the screw theory. Secondly, the analytical expressions of the inverseposition solution and the positive position solution of the parallel mechanism were obtained by using the analytical收稿日期: 2022 −10 −15; 修回日期: 2022 −12 −01基金项目(Foundation item):上海市科委重大科研计划资助项目(19DZ1100202) (Project(19DZ1100202) supported by theCommittee of Science and Technology of Shanghai Municipality)通信作者:张氢,博士,教授,从事重载机械装备、大型工程结构与设备开发与监控技术研究;E-mail :*****************.DOI: 10.11817/j.issn.1672-7207.2023.09.010引用格式: 张氢, 赵伯伦, 陈文韬, 等. 3RPS-SPS 并联机构的力位混合冗余驱动控制[J]. 中南大学学报(自然科学版), 2023, 54(9): 3481−3492.Citation: ZHANG Qing, ZHAO Bolun, CHEN Wentao, et al. Force/position hybrid control of 3RPS-SPS redundant parallel mechanism [J]. Journal of Central South University(Science and Technology), 2023, 54(9): 3481−3492.第 54 卷中南大学学报(自然科学版)method. Thirdly, according to the inverse position solution expression, the velocity and acceleration models were obtained. The dynamic model of the parallel mechanism was established by the Lagrangian method. The driving force distribution method in the redundant driving control mode of the mechanism was analyzed. Finally, a force/ position hybrid control strategy was designed on the basis of kinematics and dynamics analysis. Simulation experiments were conducted on a co-simulation system based on Simulink. The results show that the mechanism has two rotational degrees of freedom and one moving degree of freedom. The maximum angle errors of the mechanismon two rotational degrees of freedom are 5.66´10-4 rad and 3.45´10-4 rad, respectively. The maximum displacement error of the mechanism on the translational degree of freedom is 4.01´10-2 mm. Meanwhile, the maximum driving force(66 N) of the proposed force/position hybrid control strategy is smaller than the maximum driving force(190 N) of the traditional position control strategy. The distribution of the driving force of the mechanism driving branch chain is more balanced with the force/position hybrid control strategy. The designed control strategy makes the 3RPS-SPS parallel mechanism have higher kinematic accuracy and stronger bearing capacity.Key words: parallel mechanism; redundant drive; force-position hybrid control; co-simulation; kinematics; dynamics并联机构具有结构紧凑、运动精度高、机构刚度大和承载能力强[1]等优点。
毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://img.taocdn.com/s3/m/3ad4a49648d7c1c709a145a5.png)
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
3PRS并联机构的运动学和误差分析

3PRS并联机构的运动学和误差分析目录一、内容概述 (1)二、概述并联机构及运动学基础 (2)三、3PRS并联机构的运动学分析 (3)3.1 机构描述与基本结构 (5)3.2 运动学建模与方程建立 (6)3.3 运动学仿真与结果分析 (7)四、误差来源及分类分析 (8)4.1 制造误差分析 (9)4.2 安装误差分析 (10)4.3 运行误差分析 (11)五、误差模型建立与误差计算 (12)5.1 误差模型的建立方法 (13)5.2 误差计算过程及影响因素分析 (15)5.3 误差优化策略探讨 (16)六、实验验证与结果讨论 (17)6.1 实验目的与实验方案制定 (18)6.2 实验数据与结果分析对比讨论 (19)七、结论总结与展望未来发展方向分析 (20)一、内容概述本文档旨在探讨“3PRS并联机构的运动学和误差分析”。
我们需要理解并联机构及其重要性,并联机构是一种多输入多输出的机械结构,广泛应用于各种精密制造和加工领域。
3PRS并联机构以其独特的结构特点和性能优势,在机器人技术、航空航天等领域发挥着重要作用。
运动学分析:这一部分的重点在于理解3PRS并联机构的基本运动特性。
这包括对其运动学模型的建立,对其关节、连杆和末端执行器等部件的运动分析,以及对整体运动性能的优化。
理解这些基本知识,对于我们进行误差分析是非常重要的基础。
误差建模:由于在实际应用中,各种因素如制造误差、装配误差等都会对并联机构的运动性能产生影响,因此误差建模是本文的重要部分。
在这一部分,我们将详细介绍如何建立3PRS并联机构的误差模型,并分析误差来源和影响。
我们还将探讨如何对误差进行量化评估。
误差分析:基于建立的误差模型,我们将对3PRS并联机构的误差进行详细的定量和定性分析。
这包括分析误差的分布特性、对运动性能的影响等。
我们还将探讨如何通过优化结构设计、改进制造工艺等方法来减小误差,提高并联机构的运动性能。
实验验证:为了验证理论分析的正确性,本文将介绍相关的实验验证工作。
3—RPR并联机构的位姿分析及其运动仿真

A G R IC U L T U R A L T E C H N O L O G Y &E Q U IP M E N T2016.12总第324期Wu Zhenhua()In this paper,the 3-RPR parallel mechanism is taken as a research object.The position and pose of 3RPR paral-lel mechanism are analyzed.The positive solution and inverse solution of the mechanism position are obtained.Getting six group of solutions,then make the motion simulation through software UG,displacement,velocity and acceleration curve are obtained by individual axle drive and three axis drive.The results provide a basis for further research and development of the 3-RPR parallelmechanism.3-RPR mechanism,Position and orientation analysis,Motion simulation3-R P R 并联机构的位姿分析及其运动仿真武振华(山西农业大学信息学院,山西太谷030800)摘要以3-R P R 并联机构为研究对象,对机构进行了运动分析,计算机构的位姿正解和反解,得出机构的六组解,然后用U G 软件对机构进行运动分析仿真,分别对于单轴驱动和三轴驱动下机构的动平台的位移,速度和加速度的分析,为该机构的以后的分析研究和开发奠定了基础。
3-RPS并联隔振平台的建模与控制

3-RPS并联隔振平台的建模与控制【摘要】本文主要研究了3-RPS并联隔振平台的建模与控制。
在介绍了研究背景、研究意义和研究目的。
在详细讨论了3-RPS并联隔振平台的建模方法和控制策略,包括控制算法设计、仿真与实验结果以及性能优化。
最后在结论部分进行了研究总结并展望未来研究方向,对本文的结论进行了评述。
通过本文的研究,可以为3-RPS并联隔振平台的设计与控制提供重要参考,促进相关领域的发展和应用。
【关键词】3-RPS并联隔振平台、建模、控制方法、控制算法设计、仿真、实验结果、性能优化、研究总结、展望未来、结论评述1. 引言1.1 研究背景过去的研究主要集中在隔振平台的传统设计和控制策略上,但随着人们对高性能、高效率设备的需求不断增加,传统的设计和控制方法已经不能完全满足需求。
有必要对3-RPS并联隔振平台进行进一步的研究,探索新的建模方法和控制算法。
本研究旨在通过建模分析和控制算法设计,提高3-RPS并联隔振平台的性能和稳定性,为工程领域中的隔振问题提供一种新的解决方案。
通过本文的研究,不仅可以推动隔振平台技术的发展,还可以促进工程领域中的振动与噪声控制技术的进步。
1.2 研究意义3-RPS并联隔振平台的研究意义主要表现在以下几个方面:研究3-RPS并联隔振平台的建模与控制方法,对提高设备的稳定性和精度具有重要意义。
通过建立合理的动力学模型和设计有效的控制算法,可以使3-RPS并联隔振平台在不同工况下具有良好的控制性能,提高系统的抗干扰能力和适应性,从而满足工程实践中对高精度、高稳定性设备的需求。
研究3-RPS并联隔振平台的建模与控制方法,不仅有助于推动相关领域的发展和进步,也具有重要的应用和工程价值。
在未来的研究工作中,可以进一步优化系统性能,拓展应用领域,为相关领域的发展提供有力支撑。
1.3 研究目的研究目的是为了解决现有隔振平台在实际应用中存在的问题,如振动抑制效果不理想、控制精度不高等。
三自由度3_RPUR并联机构性能指标分析及优化设计_刘艳敏

图 3 机构的工作空间容积性能指标 ηW 图谱
2.2 全域条件数性能图谱及分析
机构的雅克比矩阵与机构的位形有关, 采用基于
工作空间的全域条件数性能指标来总体评价机器人的
各向同性和灵巧度,且全域条件数越接近 1,机器人的
灵巧度和控制精度越高,机构运动学性能越好。根据文
献[9],全域条件性能指标定义如下:
3.0
1.51.3 2.0
O 0.5 1.0 1.5 2.0 2.5 3.0
r1
(b)β=45°
3.0
3.0
r2
2.5 11.0
2.0
7.5 3.55.0
1.5 2.5
1.0 2.0 1.2
2.5
0.5 1.8
1.8
1.41.1
1.4
O 0.5 1.0 1.5 2.0 2.5 3.0
r1
(c)β=60°
平面图内 r1<1.5 且 r2 适中的区域;
(2)该指标值 ζ 与 Vmax l3 基本上成反比关系;
(3)随着 β 角增大,速度极大值在逐渐减小;
(4)随着 r2 的增大 ,速度的极大 值 在 增 加 ;随 着 r1 的增大,速度的极大值有两个对称轴。
r2
3.0
2.5 0.66
2.0
0.67 0.680.675
0.2
2.0 0.25
0.27
1.5 0.30 0.40
0.10
1.0 0.50
0.75 0.15 0.40
0.5
0.50 0.50 0.2 0.30
0.20
O 0.5 1.0 1.5 2.0 2.5 3.0
r1
(a)β=30°
r2
3(3-RPS)并-串联机构及其运动学分析研究
机
电
工
程
Journal of Mechanical & Electrical Engineering
Vol. 34 No. 1 Jan. 2017
DOI: 10. 3969 / j. issn. 1001 - 4551. 2017. 01. 006
3 ( 3-RPS) 并 -串联机构及其运动学分析研究 *
3( 3RPS) Parallelserial manipulator and its kinematics analysis
LIANG Hui,HU Tongshuai,WANG Lei,YANG Jiali
( College of Electromechanical Engineering ,Qingdao University of Science and Technology ,Qingdao 266061 ,China)
0
引
言
[13 ]
3RPR, 3领域出现了很多性能优越的新构型 , 例如, PSR, 3RRS, 3UPU, 3RRUR, 4CRR, 4UPU, 4RRUR 等。将多个少自由度并联机构串接成多层并串联机 构是该领域未来发展的新方向, 此类机构大多有 6 个 , 尤其在少自由度并联机构
梁 王 辉, 胡同帅 , 蕾, 杨加礼
( 青岛科技大学 机电工程学院, 山东 青岛 266061 )
3 ( 3RPS) 并RPS ) 并提出了一种新结构串联机构, 对 3 ( 3串联机构进 摘要: 针对并联机构运动学和动力学性能方面存在的问题 , RPS ) 并行了运动学方面的研究 , 对 3 ( 3串联机构的结构特点进行了介绍 , 利用螺旋理论及修正的 Kutzbach – Grüble 公式对 3 ( 3RPS) 并RPS ) 并串联机构进行了自由度计算 , 利用机构影响系数法和螺旋理论对 3 ( 3串联机构的速度和加速度进行了建模 , RPS) 并RPS ) 并得到了 3 ( 3串联机构速度和加速度的理论模型 , 利用工程分析软件 ADAMS 和 Abaqus 对 3 ( 3串联机构进行了运 动学仿真及结构受力分析 , 得到了上平台在空间中的速度和加速度曲线变化图与机构的结构受力变形图 。 研究结果表明: 3 ( 3RPS) 并RPS) 并串联机构的自由度数为 9 , 速度和加速度值等于各层之和 ; 本研究分析 3 ( 3串联机构运动学的方法也适合其他并 串联机构。 关键词: 并串联机构; 自由度; 速度; 加速度; 仿真 中图分类号: TH112 文献标志码: A 文章编号: 1001 - 4551 ( 2017 ) 01 - 0028 - 06
3-RPS并联隔振平台的建模与控制

3-RPS并联隔振平台的建模与控制1. 引言1.1 研究背景随着科学技术的不断发展,人们对高精度、高稳定性的隔振平台的需求日益增加。
隔振平台是一种能够有效隔离外部振动和噪音干扰的装置,广泛应用于精密仪器、光学设备、半导体生产等领域。
传统的隔振平台往往存在结构复杂、调节困难、控制精度低等问题,因此急需开发一种新型的隔振平台来满足高精度、高稳定性的需求。
本文旨在探讨3-RPS并联隔振平台的建模与控制方法,提出一种新型的控制策略,通过仿真实验验证方法的有效性和优势。
通过本研究的论证,可以为隔振平台的设计与控制提供新的思路和方法,推动隔振平台技术的发展和应用。
1.2 研究目的研究目的是为了解决现有隔振平台在工程实践中存在的问题,提高隔振效果。
具体包括改进隔振平台结构设计,优化建模方法,设计有效的控制策略,提出新颖的控制算法,从而实现隔振平台的稳定性和控制性能的提升。
通过本研究,旨在为工程实践提供更可靠、高效的隔振解决方案,推动隔振平台技术的发展和应用。
通过对隔振平台的建模与控制进行深入研究,可以扩展对复杂系统的控制理论,为跨学科研究提供新的方法和思路。
本研究旨在为相关领域的研究者和工程师提供参考和借鉴,推动隔振平台技术的创新和进步。
1.3 研究意义3-RPS并联隔振平台是一种应用于工程领域的重要装置,其研究对于提高工程设备的稳定性和精度具有重要的意义。
通过对3-RPS并联隔振平台的建模与控制进行深入研究,可以有效地提高该平台在工程领域的应用效果,提升工程设备的效率和性能。
研究3-RPS并联隔振平台的建模与控制方法,也有助于推动相关领域的技术创新和发展,为工程装备的设计和制造提供更加科学和可靠的技术支持。
本文旨在探讨3-RPS并联隔振平台的建模与控制方法,旨在为工程领域的相关研究和实践提供有益的参考和借鉴,具有一定的理论和实践意义。
2. 正文2.1 3-RPS并联隔振平台的结构设计3-RPS并联隔振平台的结构设计是整个系统中至关重要的一环。
3-RPS并联机器人机构位置正解的杆长逼近法(精)
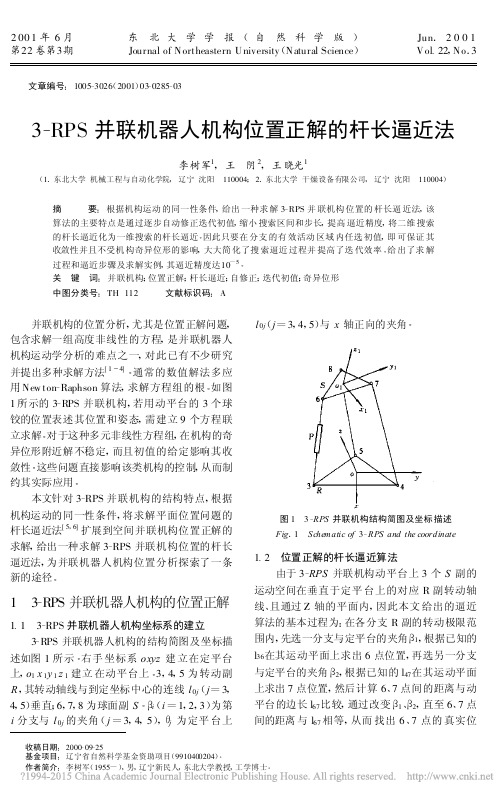
收稿日期:2000-09-25基金项目:辽宁省自然科学基金资助项目(9910400204)·作者简介:李树军(1955-),男,辽宁新民人,东北大学教授,工学博士·2001年6月第22卷第3期东北大学学报(自然科学版)Journal of Northeastern University (Natural Science )Jun .2001Vol .22,No .3文章编号:1005-3026(2001)03-0285-033-RPS 并联机器人机构位置正解的杆长逼近法李树军1,王 阴2,王晓光1(1.东北大学机械工程与自动化学院,辽宁沈阳 110004;2.东北大学干燥设备有限公司,辽宁沈阳 110004)摘 要:根据机构运动的同一性条件,给出一种求解3-RPS 并联机构位置的杆长逼近法,该算法的主要特点是通过逐步自动修正迭代初值,缩小搜索区间和步长,提高逼近精度,将二维搜索的杆长逼近化为一维搜索的杆长逼近·因此只要在分支的有效活动区域内任选初值,即可保证其收敛性并且不受机构奇异位形的影响,大大简化了搜索逼近过程并提高了迭代效率·给出了求解过程和逼近步骤及求解实例,其逼近精度达10-5·关 键 词:并联机构;位置正解;杆长逼近;自修正;迭代初值;奇异位形中图分类号:TH 112 文献标识码:A并联机构的位置分析,尤其是位置正解问题,包含求解一组高度非线性的方程,是并联机器人机构运动学分析的难点之一,对此已有不少研究并提出多种求解方法[1~4]·通常的数值解法多应用New ton -Raphson 算法,求解方程组的根·如图1所示的3-RPS 并联机构,若用动平台的3个球铰的位置表述其位置和姿态,需建立9个方程联立求解·对于这种多元非线性方程组,在机构的奇异位形附近解不稳定,而且初值的给定影响其收敛性·这些问题直接影响该类机构的控制,从而制约其实际应用·本文针对3-RPS 并联机构的结构特点,根据机构运动的同一性条件,将求解平面位置问题的杆长逼近法[5,6]扩展到空间并联机构位置正解的求解,给出一种求解3-RPS 并联机构位置的杆长逼近法,为并联机器人机构位置分析探索了一条新的途径·1 3-RPS 并联机器人机构的位置正解1.1 3-RPS 并联机器人机构坐标系的建立3-RPS 并联机器人机构的结构简图及坐标描述如图1所示·右手坐标系oxyz 建立在定平台上,o 1x 1y 1z 1建立在动平台上·3,4,5为转动副R ,其转动轴线与到定坐标中心的连线l 0j (j =3,4,5)垂直;6,7,8为球面副S ·βi (i =1,2,3)为第i 分支与l 0j 的夹角(j =3,4,5),θj 为定平台上l 0j (j =3,4,5)与x 轴正向的夹角·图1 3-RPS 并联机构结构简图及坐标描述Fig .1 Schematic of 3-RPS and the coordinate1.2 位置正解的杆长逼近算法由于3-RPS 并联机构动平台上3个S 副的运动空间在垂直于定平台上的对应R 副转动轴线、且通过Z 轴的平面内,因此本文给出的逼近算法的基本过程为:在各分支R 副的转动极限范围内,先选一分支与定平台的夹角β1,根据已知的l 36在其运动平面上求出6点位置,再选另一分支与定平台的夹角β2,根据已知的l 47在其运动平面上求出7点位置,然后计算6、7点间的距离与动平台的边长l 67比较,通过改变β1、β2,直至6、7点间的距离与l 67相等,从而找出6、7点的真实位置;再选另一分支与定平台的夹角β3,根据已知的l58在其运动平面上求出8点位置并计算7、8点间的距离与实际l78比较,通过改变β3直至7、8点间的距离与l78相等,求出8点的位置·将传统的求解9个非线性方程组的问题,转化为先进行二维搜索的杆长逼近,再进行一维搜索的杆长逼近·求解步骤如下·(1)设β1,β1m in≤β1≤β1m ax,由β1、l36求出6点位置x6=(l03-l36cosβ1)cosθ1y6=(l03-l36cosβ1)sinθ1z6=l36sinβ1(1)(2)设β2,β2m in≤β2≤β2m ax,由β2、l47求出7点位置x7=(l04-l47cosβ2)cosθ2y7=(l04-l47cosβ2)sinθ2z7=l47sinβ2(2)(3)计算6、7两点间的距离L67并判断是否与动平台的边长l67相等(设误差为Δl)L267=(x6-x7)2+(y6-y7)2+(z6-z7)2(3)判断|l67-L67|≤Δl(4)如果式(4)成立,转(5);(4)使β2=β2+Δβ,转(2);若β2>β2max,则β1 =β1+Δβ,转(1),直至式(4)成立·(5)设β3,β3m in≤β3≤β3m ax,由β3、l58求出8点位置x8=(l05-l58cosβ3)cosθ3y8=(l05-l58cosβ3)sinθ3z8=l58sinβ3(5)(6)计算7、8两点间的距离L78并判断是否与动平台的边长l78相等(误差为Δl)L278=(x7-x8)2+(y7-y8)2+(z7-z8)2(6)判断|l78-L78|≤Δl(7)如果式(7)成立,结束;否则β3=β3+Δβ,转(5)直至式(7)成立·求出6、7、8点的位置后,便可求出动平台的位置和姿态·2 改进的逼近算法按上述逼近算法和逼近步骤求得6,7,8点的坐标,虽然使式(4)和(7)成立,但受逼近精度Δl 的影响,有时不一定能保证6,8点的距离与l68之差在给定的精度Δl内,如果给定精度Δl过高还可能导致不收敛或逼近效率过低·因此在实际求解时可以通过采取逐步修正初始值并逐步提高逼近精度和缩小搜索区间的策略进行逼近·改进的逼近算法如下·(1)按1.2步骤(1)设定6点的一初始位置·(2)按1.2步骤(2)求出7点的位置,如果式(4)成立或β2≥β2max,转(3);否则使β2=β2+Δβ,重复(2)·(3)按1.2步骤(5)求出8点的位置,如果式(7)成立或β3≥β3max,转(4);否则使β3=β3+Δβ,重复(3)·(4)判断|l68-L68|≤Δl(8)如果式(4),(7),(8)同时成立结束逼近;否则令βi =βi-5Δβ(i=1,2,3),Δβ=0.618Δβ,Δl= 0.618Δl转(5)·(5)按式(1)~(3)求出6点的新位置,如果式(8)成立或β1≥β1max转(2);如果βi≥βi m ax(i= 1,2,3),机构装配不上,停止迭代;否则使β1=β1 +Δβ重复(5)·通过上述的逼近修正过程可以看出,新的逼近过程是通过逐渐自行修正初始值、缩小搜索区间和搜索步长、提高逼近精度实现的·改进后的逼近算法,将前述的二维搜索的杆长逼近化为一维搜索的杆长逼近,大大简化了搜索逼近过程并提高了逼近效率·3 算 例设图1所示机构的结构参数如下:定平台为正三角形,θ1=300°,θ2=60°,θ3=180°,l o3=l o4= l o5=0.16m,上平台为正三角形,l o16=l o17=l o18= 0.1m,当Δl=10-5时,计算结果如表1所示·表1 计算结果Tab.1 Calculating resultsl36/m0.1320.1320.1720.152l47/m0.1320.1320.1720.172l58/m0.1320.1520.1620.162x6/m4.9993946E-024.993849E-024.993989E-024.952895E-02 y6/m-0.0864977-8.649601E-02-8.649844E-02-8.578667E-02286东北大学学报(自然科学版) 第22卷 续表1x 7/m 4.993742E -024.993838E -024.993698E -020.0495648y 7/m 8.649416E -028.649583E -020.08649348.584877E -02z 7/m 0.11751160.11751250.16114860.1608689x 8/m -9.987894E -02-9.833808E -02-9.948455E -02-0.1002699y 8/m -8.731694E -09-8.596988E -09-8.697215E -09-8.765873E -09z 8/m 0.11751360.13893090.15027270.1505866β1/(°)62.905362.9043569.5410666.36337β2/(°)62.9033162.9042569.5389969.27411β3/(°)62.905366.068568.0651568.364274 结 论(1)提出的杆长逼近法及其修正算法,只要在分支的有效活动区域内任选初值,即可保证其收敛性并不受机构奇异位形的影响,因为初值在逼近过程中是自动修正的·(2)提出的修正算法将二维搜索的杆长逼近化为一维搜索的杆长逼近,通过自动修正初值、缩小搜索区间和步长、提高逼近精度,大大简化了搜索逼近过程并提高了逼近效率·程序运行实践表明,其逼近精度达10-5·但是当逼近精度时,出现不收敛现象,需要对搜索区间和步长进行专门处理·参考文献:[1]Han K Y ,Chung W Y ,Youm Y .New resolution scheme of the forward kinematics of parallel manipulators using extra sens or [J ].Transactions of the ASM E J of M ech Design ,1996,118(2):214-219.[2]Al izade R I ,Tagiyev NR .A forw ard and reversedisplacem ent anal ysis of a 6-DOF in -parallel manipulator [J ].M ech M ach Theory ,1994,29(1):115-124.[3]Zhao X H ,Peng S X ,A s uccessive approximation algorithm for the direct position anal ysis of parallel manipulators [J ].M ech M ach Theory ,2000,35(8):1095-1101.[4]赵明扬·并串联机器人结构、建模与控制研究[D ]·沈阳:东北大学,1994·(Zhao M Y .Research on structures ,modeling and con trol of series -paral lel robot manipulator [D ].Shenyang :Northeastern University ,1994.)[5]李树军,王丹,王晓光,等·复杂平面机构运动分析的角变量逼近法[J ]·东北大学学报(自然科学版),2000,21(1):46-49·(Li S J ,W ang D ,Wang X G ,et al .Tu rning variables iterative method for kinematic analys is of complex planar linkages [J ].Journal of Northeastern Univers ity (Natu ral Science ),2000,21(1):46-49.)[6]黄真·平面多杆机构位置问题的杆长逼近法[J ]·机械工程学报,1981,17(2):68-76·(Huang Z .T he method of successive approximation of l ink length for the pos ition problem of complex plane l ink mechanisms [J ].Chinese Jou rnal of M echanical Engineering ,1981,17(2):68-76.)Forw ard Position Analysis of 3-RPS In -Parallel Manipulator UsingSelf -modified Successive Approximation MethodLI Shu -jun 1,WANG Y ue 2,WANG X iao -guang 1(1.School of Mechanical Eng ineering &Automation ,No rtheastern U niversity ,Shenyang 110004,China ;2.Drying Equipment Co .,L td .,Nor theastern University ,Shenyang 110004,China )A bstract :A new scheme for the forward position analysis of 3-RPS in -parallel manipula tor ,which is based on the fact that locations of three globular joints fo rm triangle of the moving platfo rm ,is presented .I n the successive approx imation method ,the joint positio ns of globular joints is de termined by checking the distances of three sides of moving platform .I n general numerical schemes ,which determine a solutio n from a set of nonlinear simultaneous equations ,the convergence rate varies with different joint inputs .T he co nvergence of this metho d depends chiefly o n approx imative accuracy not on the joint inputs because joint inputs ,search reg ion and step are self -modified successively in the process .T here is also no influence o n the neighborhood of sing ularity for the solutio n .T he example was given ,and running results o f the prog ram show the approx imative accuracy can be 10-5.Key words :parallel manipulator ;forw ard position ;successive approximation ;self -modified ,joint inputs ,singularity(Received September 25,2000)287第3期 李树军等:3-RPS 并联机器人机构位置正解的杆长逼近法。
3-RPS并联隔振平台的建模与控制

3-RPS并联隔振平台的建模与控制1. 3-RPS并联隔振平台的结构与原理3-RPS并联隔振平台是一种基于平台和支撑系统连杆机构的并联机构。
其主要由平台、3个R(旋转)P(平移)S(绕线)连杆机构和支撑系统组成。
平台负责承载实验设备或工件,而3个RPS连杆机构则通过旋转、平移和绕线运动,使平台能够实现多维度的隔振效果。
支撑系统则通过控制力的调节,实现对平台在不同频率下的隔振要求。
2. 3-RPS并联隔振平台的建模为了研究和控制3-RPS并联隔振平台的运动特性,需要建立其运动学和动力学模型。
在进行建模时,通常可以采用基于刚体运动学的方法来描述平台和连杆机构之间的运动关系,同时通过运动学方程和动力学方程来描述系统的运动特性。
2.1 运动学模型在建立3-RPS并联隔振平台的运动学模型时,不同连杆机构之间的运动关系是需要特别考虑的问题。
通过建立以平台为参考系的坐标系,可以描述平台与3个RPS连杆机构之间的运动关系。
利用这些坐标关系,可以推导出平台的位姿和姿态信息,从而描述平台的运动状态。
2.2 动力学模型除了运动学模型外,动力学模型也是非常重要的一部分。
通过建立3-RPS并联隔振平台的动力学模型,可以描述系统在受到外力或扰动时的运动特性。
在建立动力学模型时,需要考虑到平台的质量、支撑系统的刚度和阻尼等因素,从而描述系统的动力学特性。
3. 3-RPS并联隔振平台的控制方法在研究与应用3-RPS并联隔振平台时,其控制方法是非常关键的一环。
通过合理的控制方法,可以实现对平台的精确控制,从而有效减小地面振动对系统的影响。
3.1 传统的PID控制方法在控制3-RPS并联隔振平台时,传统的PID控制方法是一种常用的控制策略。
通过调节控制器中的比例、积分和微分参数,可以实现对平台的位置控制和姿态控制,使其能够达到所需的隔振效果。
3.2 模型预测控制方法除了传统的PID控制方法外,模型预测控制方法也是一种常用的控制策略。
3-PRS并联机构位置正解分析
3-PRS并联机构位置正解分析黄俊杰;赵俊伟【摘要】The structure of a 3-PRS parallel mechanism, including two rotation degrees of freedoms (DOFs) and one prismatic DOF, is analyzed. The kinematic equation of a motion platform is given by a closed vector method and a simplified coordinate transfer matrix, and then the kinematic forward solution of this parallel mechanism is optimized by making use of a genetic algorithm object function, which is substituted into the kinematic equation and the length of a linked rod is solved. This approach has a small error and high precision compared with the known connecting rod, and provides a foundation for their control strategies. This method does not select the initial iteration value and does not need a complicated mathematical deduction. The results are satisfactory and the implement is easy. Thusly, it is also suitable for other similar parallel mechanisms.%根据3-PRS并联机构具有2个转动自由度和1个移动自由度的结构特点,利用封闭矢量方法和简化坐标转换矩阵,得到该机构运动平台中心的运动方程,然后运用遗传算法并结合其运动方程给出并联机构运动学位置正解适应度函数和目标函数,将计算结果代入运动方程求出杆长,其误差小、精度高,为3-PRS并联机构的控制策略奠定了基础.该解法既不需要选取迭代初值,也不需要复杂的数学推导,容易实现而且通用性强.【期刊名称】《河南理工大学学报(自然科学版)》【年(卷),期】2012(031)004【总页数】4页(P434-436,452)【关键词】3-PRS并联机构;运动学正解;遗传算法;Matlab【作者】黄俊杰;赵俊伟【作者单位】河南理工大学机械与动力工程学院,河南焦作454000;河南理工大学机械与动力工程学院,河南焦作454000【正文语种】中文【中图分类】TD712.520 引言少自由度并联机构具有结构简单、容易控制等优点,常用于模块化制造系统和用以构成串并联机床、微动机构和特殊用途的机器人中.目前,随着自动化程度的提高,少自由度并联机构具有很大的发展潜力和广阔的应用前景[1].少自由度并联机构的运动学位置正解(用已知驱动件的运动规律来求解运动平台末端的位姿称为正解,反之称为逆解或反解)是并联机构运动学研究的难点之一;又因为它是工作空间分析、动力分析和误差分析等的基础,具有重要的理论意义,所以一直是学者们研究的热点.目前,常用的方法有数值法和解析法两种[2-3].数值法是一种效果不错的方法,但传统的迭代方法依赖于迭代初值,计算量大且迭代结果可能不收敛.为避免求解复杂的强耦合非线性方程组,将一些智能算法例如粒子群优化算法、神经网络等非数值算法运用到并联机构中,以解决其不同的问题[4-5].1 3-PRS并联机构3-PRS并联机构主要由3个完全相同的支链AiPiBi(i=1,2,3)组成(图1),其3个立柱空间均匀分布并与固定平台A1A2A3固结在一起,滑块通过移动副与立柱连接;连杆PiBi(i=1,2,3)一端通过转动副与滑块相连,另一端通过球铰与运动平台相连接,主轴安装于运动平台B1B2B3中央,以实现其运动的要求[6].2 运动学正解分析为便于分析,在固定平台上建立了1个绝对坐标系oxyz.其中,xoy平面垂直于3个立柱,x轴过△A1A2A3的顶点A1.假设△A1A2A3的外接圆半径为R,运动平台B1B2B3的外接圆半径为r,几何中心为C,在运动平台上建立局部坐标系ocxcyczc,坐标原点oc与几何中心C重合.xc轴的顶点B1、坐标轴的方向如图1所示.在绝对坐标系oxyz坐标下,有rpi(i=1,2,3),(1)式中:roc表示运动平台中心C在绝对坐标系oxyz的向量坐标,表示点Bi在局部坐标系ocxcyczc的向量坐标,,,表示点pi在绝对坐标系中的向量坐标,且有rp1=[R 0 zp1],,R表示局部坐标系ocxcyczc向绝对坐标系oxyz的坐标变换矩阵.由文献[6-7] 可知,该并联机构的运动平台3个自由度,分别为2个转动自由度和1个移动自由度,因此R简化表示为:,式中:α和β分别为绕x轴和y轴的姿态角.而连杆的长度为|rpiBi|=l(i=1,2,3).(2)由式(1)和(2)可知,运动平台几何中心C应满足3 正解的遗传算法遗传算法[8-9](Genetic Algorithm,简称GA)最先是在1975年由John Holland 提出的,为一类借鉴生物界自然选择和自然遗传机制的随机搜索算法.它是以一种群体中的所有个体为对象,利用随机化对一个被编码的参数空间进行高效搜寻,其中选择、交叉和变异为遗传算法的基本操作.因此,该算法非常适用于处理传统搜索算法难以解决的非线性优化问题(常被用于组合优化、信号处理和自适应控制等领域,取得了良好的成果).运用遗传算法求解问题的关键是建立适应于遗传算法的适应度函数以及目标函数,式(3)是3-PRS并联机构正解的运动学模型.其中,(x,y,z)为运动平台中心C的坐标.运用遗传算法时,需要优化这3个变量,寻求其最优解.其求解3-PRS并联机构正解的适应度函数和目标函数分别为,(4)即寻求最佳值(x,y,z)使得F值最小.4 实例计算3-PRS并联机构几何尺寸为l=910 mm,r=100 mm,R=300 mm;滑块在立柱上的位置分别为R1Z=1 569 mm,R2Z=1 682 mm,R3Z=1 864 mm;变量取值范围为x∈[-300,300],y∈[-300,300],z∈[0,1 500],由Matlab遗传算法工具箱计算可得最佳适应度变化值和变量值(图2).图2中的1,2,3,分别表示3个变量x,y,z.将图2中计算得到的运动平台位置参数x=140.955 mm,y=243.974 mm,z=874.112 mm代入式(2)中,可计算杆长l=910.000 234 mm.和已知杆长相比较,其误差近似为0.000 234 mm,其精度可控制在5×10-6之内.5 结语根据3-PRS并联机构结构的特点,采用封闭矢量法和简化的坐标变化矩阵容易得到运动平台中心C的运动方程,但运动平台中心C的运动方程具有非线性特点,使得求解困难,因此,结合遗传算法建立3-PRS并联机构运动学正解适应度函数和目标函数,运用Matlab遗传算法工具箱很容易求出运动平台C的坐标.该解法得出的结果误差小、精度高,且通用性强,容易实现.参考文献:[1] 石晓宇.少自由度并联机构研究综述[J].煤矿机械,2011,32(10):13-14.[2] 高征,高峰,苏锐.一种六自由度3-UrPS并联机构的正解研究[J].中国机械工程,2007,18(7):846-850.[3] 郭宗和,段建国,郝秀清,等.4-PTT并联机构位置正反解与工作空间分析[J].农业机械学报,2008,39(7):144-148.[4] 陈莉,张宏立.粒子群算法在六自由度并联机器人位置正解中的应用[J].重庆理工大学学报:自然科学版,2010,24(8):86-90.[5] ZHANG KE, WANG SHENG-ZE. Kinematics design of a parallel controllable mechanism based on partical swarm optimizationalgothm[J]. Journal of Computers,2011,6(6):1094-1101.[6] 赵俊伟.串并联机床精度理论及检测装置研究[D].武汉:华中科技大学,2001.[7] 黄俊杰,贾智宏,赵俊伟.3-PRS并联机器人的工作空间研究与分析[J].机械科学与技术,2012(4):660-665.[8] 潘芳伟,段志善,贺利乐,等.基于遗传算法的新型六自由度并联机器人运动学分析[J].机械科学与技术,2007,26(6):770-774.[9] 史峰,王辉,胡斐,等.Matlab智能算法30个案例分析[M].北京:北京航空航天大学出版社,2011.。
3_RPS控制位置用并联机器人机构的位置反解
孔宪文
摘 要 系统研究了 32 文中首先揭示 R PS 控制位置用并联机器人机构的位置反解问题。 了 32 R PS 控制位置用并联机器人机构位置反解方程组解的分组特点, 然后应用文 [ 1 ] 提出的用连续法求解多项式方程组时构造初始方程组的一条新原则, 给出了该 机构位置反解的高效算法。 对于给定的输出, 32R PS 控制位置用并联机器人机构位 置反解的数目为 64 ( 对于一般形式) 、 32 ( 当机构有且仅有一个最简 R PS 支路时) 、 16 ( 当机构有且仅有两个最简 R PS 支路时) 、 ( 8 当机构各个支路均为最简 R PS 支路 时) , 这些位置反解可分别通过跟踪 64、 32、 16 和 8 条同伦路径得到。 关键词 并联机器人 位置反解 连续法 中图号 T G 434. 5 引 言 并联机器人具有承载能力大、 精度高、 工作空间小等特 点, 近二十年来, 并联机器人的研究已成为机器人研究的重 要分支之一。 并联机器人可以分为三类: 全自由度并联机器 人 ( 指自由度等于 3 的平面或球面并联机器人、 自由度等于 6 的空间并联机器人) ; 冗余自由度并联机器人 ( 指自由度 大于 3 的平面或球面并联机器人、 自由度大于 6 的空间并 联机器人) ; 少自由度并联机器人 ( 指自由度少于 3 的平面 或球面并联机器人、 自由度少于 6 的空间并联机器人) 。 全自由度并联机器人已得到较充分的研究, 冗余自由 度并联机器人 [2 ] 已取得一定进展, 而少自由度并联机器人 的研究近年刚刚起步 [3~ 5 ]。 32 R PS 并联机器人是一种较典 型的具有三个自由度的少自由度并联机器人, 具有良好的 应用前景, 文 [ 3, 4 ] 研究了 32 R PS 并联机器人机构的运动 学问题, 其位置正解可以按文 [ 6 ] 方法进行, 位置反解问题 至今未得到深入研究。 近年发展起来的连续法为 32 R PS 并联机器人机构位 置反解问题的研究提供了有效工具。 连续法是求解多项式 方程组的一种有效方法, 已成功地应用于机构位置分析与 综合 [1, 7, 8 ]、 机构特殊位形分析 [9 ]、 柔性机构力逆解 [10 ] 等机 构学问题研究。 连续法的基本思想是由初始方程组 G ( Z ) = 0 的解逐 步逼近待解方程组 F (Z ) = 0 的解。 构造初始方程组 G ( Z )
3-RPS并联稳定平台设计与仿真研究
3-RPS并联稳定平台设计与仿真研究张峰;贾银亮;张弛宇;梁康武【摘要】为了避免舰船运动对摄像系统的工作造成影响,设计了一种3-RPS并联稳定平台.首先在Maxsurf软件中根据舰船参数、横摇参数、纵摇参数及随机波浪参数进行仿真,得到舰船的横摇、纵摇和垂荡的运动参数;其次根据舰船运动的仿真结果,利用极限边界搜索法仿真3-RPS并联稳定平台的工作空间;最后在Simulink中,利用SimMechanics机械组件,搭建及配置3-RPS并联稳定平台模型,并对建立好的3-RPS并联稳定平台对横摇、纵摇和垂荡进行补偿的动力学仿真,验证稳定平台设计的合理性.【期刊名称】《机械制造与自动化》【年(卷),期】2018(047)003【总页数】4页(P145-148)【关键词】舰船;并联稳定平台;工作空间;动力学仿真【作者】张峰;贾银亮;张弛宇;梁康武【作者单位】南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106【正文语种】中文【中图分类】TP391.90 引言随着我国军事科技的发展,舰载平台机构也在飞速发展。
舰船在海面上行驶,不可避免发生不稳定运动,会对舰船上摄像系统的正常工作产生不良影响。
因此需要一种稳定平台来隔离舰船的不稳定运动,从而保障摄像系统的稳定。
目前采用的机械稳定平台,多为传统的二、三轴串联转动平台。
如陕西某公司研制的舰载X-Y型两轴稳定平台,利用惯性导航设备检测舰船摇荡参数,通过伺服系统分别驱动横摇轴、纵摇轴使平台向载体转动相反方向旋转,从而保证载体方位轴始终垂直指向大地[1]。
南京某大学研制的船载卫星通讯系统稳定平台,采用三轴(方位、横滚、俯仰)稳定、两轴(方位、俯仰)指向的稳定系统结构[2]。
这类平台是一种集光机电一体的现代化设备,在飞行器、舰船等领域有着广泛的应用,当作为稳定平台使用时,只能隔离转动[3]。
基于ADAMS的3-RPS型并联机器人位姿的正解与逆解
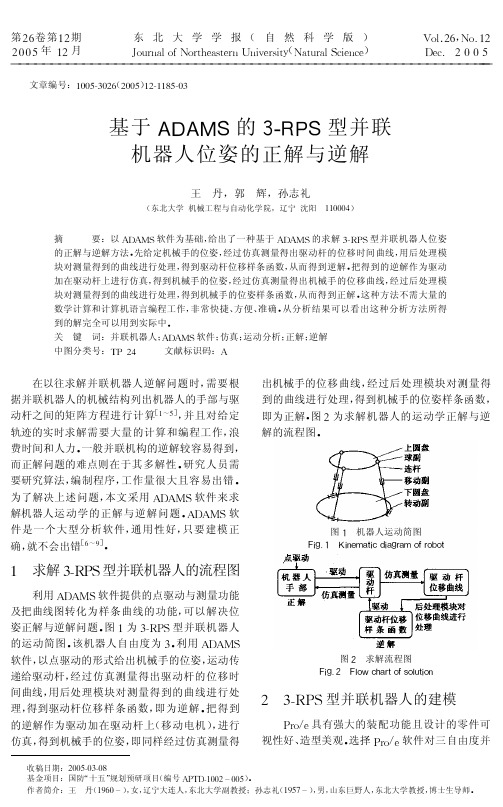
收稿日期:2005-03-08基金项目:国防“十五”规划预研项目(编号A PTD -1002-005)·作者简介:王丹(1960-),女,辽宁大连人,东北大学副教授;孙志礼(1957-),男,山东巨野人,东北大学教授,博士生导师·第26卷第12期2005年12月东北大学学报(自然科学版)Journal o f Nort heastern uni versit y (N at ural S cience )V o l.26,No.12!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!D ec .2005文章编号:1005-3026(2005)12-1185-03基于ADA MS 的3-RPS 型并联机器人位姿的正解与逆解王丹,郭辉,孙志礼(东北大学机械工程与自动化学院,辽宁沈阳110004)摘要:以ADAM S 软件为基础,给出了一种基于ADAM S 的求解3-RPS 型并联机器人位姿的正解与逆解方法·先给定机械手的位姿,经过仿真测量得出驱动杆的位移时间曲线,用后处理模块对测量得到的曲线进行处理,得到驱动杆位移样条函数,从而得到逆解·把得到的逆解作为驱动加在驱动杆上进行仿真,得到机械手的位姿,经过仿真测量得出机械手的位移曲线,经过后处理模块对测量得到的曲线进行处理,得到机械手的位姿样条函数,从而得到正解·这种方法不需大量的数学计算和计算机语言编程工作,非常快捷、方便、准确·从分析结果可以看出这种分析方法所得到的解完全可以用到实际中·关键词:并联机器人;ADAM S 软件;仿真;运动分析;正解;逆解中图分类号:T P 24文献标识码:A在以往求解并联机器人逆解问题时,需要根据并联机器人的机械结构列出机器人的手部与驱动杆之间的矩阵方程进行计算[1!5],并且对给定轨迹的实时求解需要大量的计算和编程工作,浪费时间和人力·一般并联机构的逆解较容易得到,而正解问题的难点则在于其多解性·研究人员需要研究算法,编制程序,工作量很大且容易出错·为了解决上述问题,本文采用ADAM S 软件来求解机器人运动学的正解与逆解问题·ADAM S 软件是一个大型分析软件,通用性好,只要建模正确,就不会出错[6!9]·1求解3-RPS 型并联机器人的流程图利用ADAM S 软件提供的点驱动与测量功能及把曲线图转化为样条曲线的功能,可以解决位姿正解与逆解问题·图1为3-RPS 型并联机器人的运动简图·该机器人自由度为3·利用ADAM S 软件,以点驱动的形式给出机械手的位姿,运动传递给驱动杆,经过仿真测量得出驱动杆的位移时间曲线,用后处理模块对测量得到的曲线进行处理,得到驱动杆位移样条函数,即为逆解·把得到的逆解作为驱动加在驱动杆上(移动电机),进行仿真,得到机械手的位姿,即同样经过仿真测量得出机械手的位移曲线,经过后处理模块对测量得到的曲线进行处理,得到机械手的位姿样条函数,即为正解·图2为求解机器人的运动学正解与逆解的流程图·图1机器人运动简图F i 9.1K i nemati c d i a 9r am o f r obo t图2求解流程图F i 9.2F l ow chart o f so l uti on23-RPS 型并联机器人的建模P ro /e 具有强大的装配功能且设计的零件可视性好、造型美观·选择P ro /e 软件对三自由度并联机器人进行三维建模,避免了为装配相同的零件进行重复建模的工作·图3为3-RPS型并联机器人在P ro/e软件中所建的三维模型装配图·图3机器人三维模型装配图F i g.33-d mode l assembl i n g o f r obo tADAM S软件提供了与P ro/e软件的接口·M ECHAN I SM/P ro模块是连接P ro/e与ADAM S 的接口模块·二者采用无缝隙接口,用户不需要退出P ro/e的应用环境就可以根据装配好的机械模型运动关系定义机械系统模型并对其进行运动学和动力学仿真,以及干涉检验等仿真后处理工作;还可以将定义好的机械系统模型传送到ADAM S/V ie w中,以便进行全面的动力学分析·3求解3-RPS型并联机器人的方法3.1应用点驱动确定机械手的运动轨迹假设让机械手每秒钟向下运动5mm,做螺旋线运动,以此为例求解并联机器人的正解与逆解·下圆盘固定在大地g round上,在上圆盘上任选一点为机械手的执行关键点,在该点上加一个三维的点驱动·给出点驱动的位置与时间!的关系方程:水平"方向30cos!;铅直#方向5!;水平$方向30si n!·给机器人的手部添加了点驱动以后进行机器人运动仿真·通过仿真可以看到机器人的手部按照预定的螺旋线轨迹运动,可以把运动轨迹保存为曲线,以便直观地对此做进一步的分析和研究,还可以与求正解时产生的轨迹进行对比·3.2求运动学逆解利用ADAM S软件为用户提供的各种测量功能,测量出仿真过程中驱动杆的位移与时间的变化关系曲线图·图4为运行20s,200步仿真所得到的其中一个驱动杆的位移-时间曲线图·位移曲线图必须经过仿真后处理模块把数据曲线转化成样条曲线,才能作为驱动加以利用·ADAM S/V ie w使用曲线适应技术进行数据点之间的插值,产生连续的函数·如果样条函数有一个独立的变量,ADAM S/V ie w采用3次多项式进行点与点之间的插值;如果样条函数的数据有两个独立的变量,ADAM S/V ie w采用3次插补方法对一个独立的变量进行点与点之间的插值,然后使用线性方法对第二个独立变量进行曲线之间的插值·转化后得到的样条曲线可以是一系列的二维或三维的离散数据点,也可以是有点标记的样条曲线·可以对样条曲线进行添加数据点、修改数据、添加单位等操作·由于得到的驱动杆的测量曲线是时间与位移的关系曲线,所以应用后处理模块得到的样条函数是位移相对于时间的函数,只有时间!一个自变量,即样条函数有一个独立变量,所以采用3次多项式进行点与点之间的插值·把测量得到的曲线保存后传送到仿真后处理模块·打开曲线编辑工具,分别把3条曲线转化成样条曲线,便得到了并联机器人驱动副运动状态样条曲线的离散数据点·得到样条曲线以后,在编辑对话框中对其进行编辑,添加单位等,可以得到离散的数据,也可以得到有标记的曲线,并得到样条曲线的数据·此结果经过处理可以作为驱动函数使用,即得到了并联机器人的逆解[10]·图4连杆1的运动曲线图F i g.4K i nemati c cur ve o f l i nk13.3求运动学正解并联机器人的逆解已经求出,即得到了驱动杆运动关系变化的样条曲线,则求解机器人正解的已知条件就已经得到了·根据ADAM S提供的样条函数,把样条曲线的离散数据点作为已知条件,生成驱动杆的驱动函数·根据ADAM S提供的样条函数功能,便可给机器人的3个驱动杆添加位移随时间变化的驱动函数,分别为:m otion1:AK I SPL(ti m e,0,s p li ne pp m a g1,0)-510;m otion2:AK I SPL(ti m e,0,s p li ne pp m a g2,0)-510;m otion3:AK I SPL(ti m e,0,s p li ne pp m a g3,0)-510·添加了驱动以后,把点驱动设置为无效状态,对系统模型进行20s,200步的仿真,可以得到并联机器人手部的运动轨迹·再采用后处理模块把得到的手部运动的位姿测量曲线图转化成样条函数,就是并联机器人的位姿正解·通过测量功能也可以得到手部的速度和加速6811东北大学学报(自然科学版)第26卷度等随时间变化的曲线图·从得到的曲线及生成的数据文件可以看出,样条函数的曲线图与测量的运动关系曲线图是完全相同的·用ADAM S 软件将曲线转化成样条曲线精度是很高的,所以由此得到的并联机器人的正解与逆解是正确的·图5为机器人仿真图,从图中可以看到机器手的轨迹·在仿真过程中还可以看到,由驱动杆驱动时机械手运动轨迹同求逆解时所加的点驱动时的运动轨迹完全吻合·由此可以证明,应用ADAM S 软件求解并联机器人的正解和逆解问题是可行的,结果也是正确的·图5机器人仿真图F i g .5S i mul ati on g r a P h o f r obo t4结语用ADAM S 软件来求解机器人的运动学正解与逆解的问题,不必进行大量的编程工作,可以节省大量的时间和人力·ADAM S 软件的模型构架决定了在ADAM S 软件中由曲线转化的样条曲线精度是很高的,因此,利用此种方法得到的并联机器人的正解与逆解也是精度较高的·这在研制新型机器人、新型机床方面有着重要意义,不但可以为科研人员自编程序的通用性和正确性做出验证,也可以直接对新型机器人做运动学与动力学分析,大大加快了创新的步伐·参考文献:[1]陈学生,陈在礼,孔民秀·并联机器人的进展与现状[J ]·机器人,2002,24(5):464-470·(Chen X S ,Chen Z L ,K on g M X.the deve lo p m ent and ac-tualit y of p aralle l robo t [J ].R obot ,2002,24(5):464-470.)[2]R ank y P G.R econfi g urab le robot too l des i g ns and i nte g rationa pp lications [J ].i ndustrial R obot ,2003,30(4):338-344.[3]K ochan A.Paralle l robot p erf ect p ro p e llers [J ].i ndustrialR obot ,1996,23(4):27-30.[4]孟祥志,伍懿,刘志峰,等·一种新型并联机器人的运动性能[J ]·东北大学学报(自然科学版),2003,24(11):1078-1081·(M en g X Z ,W u Y ,L i u Z F ,et al .K i ne m atic behavior of a new p aralle l robo t [J ].Journal o f N ort heastern Unioersit y (Nat ural S cience ),2003,24(11):1078-1081.)[5]Zhan g C D ,S on g S M.F or w ard ki ne m atics of a class of p ar-alle l (S tew art )p latf or ms w it h closed-f or mso lutions [J ].Jour-nal o f R obotic S y ste m s ,1992,9(1):93-112.[6]S u HJ ,L iao @Z ,L ian g C G.D irect p os itional anal y s is f or aki nd of 5-5p latf or mi n-p aralle l robotic m echan is m [J ].M echM ach theor y ,1999,34(3):285-301.[7]G re g orio R D ,V i ncenZo P C.M ob ilit y anal y s is o f t he 3-UPUp aralle l m echan is m asse m b led f or a p ure trans lational m otion [J ].t ranslations o f t he A SM E Journal o f M echanical d e-si g n ,2002,124(6):259-264.[8]H unt K H.S tructural ki ne m atics o f i n-p aralle l actuated robo tar m s [J ].J o f M ech t rans and A uto in d esi g n ,1983,105(11):705-712.[9]M l y narski t.Pos ition anal y s is of p lanar li nka g es us i n g t hem et hod o f m od ification o f ki ne m atic un it [J ].M ech M achtheor y ,1996,31(6):831-838.[10]郭祖华,陈五一,陈鼎昌·6杆并联机构运动学及杆受力的仿真[J ]·北京航空航天大学学报,2001,27(1):101-104·(G uo Z H ,Chen W Y ,Chen D C.K i ne m atics and d y na m icss i m ulation of s i x -bar li nka g es p aralle l robo t [J ].Journal o fB ei j in g Unioersit y o f A eronautics and A stronautics ,2001,27(1):101-104.)Nor m al and i nverse Pose S o l uti ons t o 3-RPS Parallel Robot based on ADAM SW ANG d an ,GUO ~ui ,SUN zhi-li (S choo l o f M echan ical e n g i neeri n g &A utom ation ,N ort heastern U n ivers it y ,S hen y an g 110004,Ch i na .C orres p ondent :W ANG D an ,associate p ro f essor ,e -m ail :ww dd60! )Abstract :b ased on ADAM S so ft w are ,a w a y to g et bo t h nor m al and i nverse p ose so lutions to 3-RPS p aralle l robo t w as p ut f or w ard.W it h t he p ose o f m an i p ulator g iven first ,t he ti m e-de p endent curves o f drivi n g li nk can be obtai ned t hrou g h s i m ula-tion.then ,t he curves are p rocessed b y a p ost p rocess i n g m odule o f ADAM Sto g et t he s p li ne f unction o f drivi n g li nk d is p lace-m ent ,t hus g etti n g t he i nverse so lutions.A dd i n g t he i nverse so lutions as a drive to t he drivi n g li nk w it h a s i m ulation conducted ,t he p ose o f m an i p ulator can be g o tten.the nor m al so lution is g o t t he w a y t he d is p lace m ent curve o f m an i p ulator ,m easured via s i m ulation ,is p rocessed b y t he p ost p rocess i n g m odule ,so as to deter m i ne t he s p li ne f unction o f m an i p ulator ’s p ose hence t henor m al so lution.in such a w a y no b i g a m ount o f w orkload is re C uired i n p ro g ra mm i n g and com p utation ,f eatured w it h f ast ,conven ient and exact ,and bo t h nor m al so lution and i nverse so lution can be used i n p ractice.K e y words :p aralle l robo t ;ADAM Sso ft w are ;s i m ulation ;ki ne m atic anal y s is ;nor m al so lution ;i nverse so lution (R eceio ed M arch 8,2005)7811第12期王丹等:基于ADAM S 的3-RPS型并联机器人位姿的正解与逆解基于ADAMS的3-RPS型并联机器人位姿的正解与逆解作者:王丹, 郭辉, 孙志礼, WANG Dan, GUO Hui, SUN Zhi-li作者单位:东北大学,机械工程与自动化学院,辽宁,沈阳,110004刊名:东北大学学报(自然科学版)英文刊名:JOURNAL OF NORTHEASTERN UNIVERSITY(NATURAL SCIENCE)年,卷(期):2005,26(12)被引用次数:8次1.Mlynarski T Position analysis of planar linkages using the method of modification of kinematic unit 1996(06)2.Hunt K H Structural kinematics of in-parallel actuated robot arms[外文期刊] 1983(11)3.Gregorio R D;Vincenzo P C Mobility analysis of the 3-UPU parallel mechanism assembled for a pure translational motion 2002(06)4.Su H J;Liao Q Z;Liang C G Direct positional analysis for a kind of 5-5 platform in-parallel robotic mechanism[外文期刊] 1999(03)5.Zhang C D;Song S M Forward kinematics of a class of parallel(Stewart)platforms with closed-form solutions 1992(01)6.孟祥志;伍懿;刘志峰一种新型并联机器人的运动性能[期刊论文]-东北大学学报(自然科学版) 2003(11)7.Kochan A Parallel robot perfect propellers[外文期刊] 1996(04)8.Ranky P G Reconfigurable robot tool designs and integration applications[外文期刊] 2003(04)9.郭祖华;陈五一;陈鼎昌6杆并联机构运动学及杆受力的仿真[期刊论文]-北京航空航天大学学报 2001(01)10.陈学生;陈在礼;孔民秀并联机器人的进展与现状[期刊论文]-机器人 2002(05)1.王丹.杨兰松.郭辉.WANG Dan.YANG Lan-song.GUO Hui3-RPS型并联机器人的运动学及动力学分析[期刊论文]-机械设计与制造2007(3)1.陈鲁刚.平雪良.徐稀文.吉祥基于ADAMS的焊接机器人轨迹规划[期刊论文]-江南大学学报(自然科学版)2011(2)2.徐东涛.孙志礼基于ADAMS的平动机构运动轨迹的规划与验证[期刊论文]-机械与电子 2010(9)3.陆由斌.胡国栋.吕健.刘加磊基于ADAMS的6自由度机器人的正解与逆解[期刊论文]-机电产品开发与创新2010(5)4.王晓涧.张宏涛一种少自由度并联机器人的逆运动学仿真[期刊论文]-机械工程与自动化 2009(1)5.丁佳洛.战强基于ADAMS的串联机器人运动学反解与动力学优化[期刊论文]-机电产品开发与创新 2008(1)6.朱春霞.朱立达.刘永贤.蔡光起并联机器人多柔体系统协同建模与动力学仿真[期刊论文]-东北大学学报(自然科学版) 2008(3)7.杨强.孙志礼.闫明.许敏一种新型五自由度并联机构运动学分析与仿真[期刊论文]-东北大学学报(自然科学版) 2008(1)8.王丹.杨兰松.郭辉3-RPS型并联机器人的运动学及动力学分析[期刊论文]-机械设计与制造 2007(3)本文链接:/Periodical_dbdxxb200512017.aspx。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3—RPS并联平台机构的位姿研究
作者:王领军
来源:《中国科技博览》2015年第26期
[摘要]3-PRS并联机器人作为一个新兴的发展方向,在社会生活的各个领域都有着广泛的应用价值和潜力。
并联机构具有刚度大,结构稳定,承载力强,没有误差,精度高,运动惯性小,运动反解的解求解较容易,易于实现实时运动控制等优点,在医疗器械、机床等领域有很多应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的位姿分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;
[关键词]3-RPS并联机器人;位姿分析;解耦分析
中图分类号:R744.7 文献标识码:A 文章编号:1009-914X(2015)26-0208-02
引言
目前,国内外对并联机器人机构位置正解主要有解析法和数值法,它们各有自己的优缺点:数值法数学模型相对简单,能够适用于大多数的并联机构,但它不能求出全部位置的解,国内外学者对此作了大量的研究。
国内对位置正解解析法的研究主要是北京邮电大学机械学研究所进行的,至今,他们分别获得了3-TPS、3-6SPS、5-4型、6-4型、5-5型、6-5型机构的位置正解,并验证了机构解的数目。
1、机构描述
3-RPS并联机构由动平台、固定基座以及三条拓扑结构完全相同的支链组成。
对于每一条支链而言,是由定长连杆在一端通过球面副与动平台相连,在另一端通过转动副与滑块相连,该滑块可以沿着固定于基座的滑道上下移动。
机构中各构件的布置采用对称方式,三条滑道垂直于固定基座并互成120°分布,转动副的转动轴线与滑道沿线及点O到转动副中心连线垂直,球面副亦互成120°均匀分布在动平台上。
从而动平台和固定基座可以分别简化为等边三角形,并且当三个滑块处于高度时,其中心连线也为等边三角形。
2、3-RPS并联机构位姿分析
3-RPS并联机构是3自由度的空间机构,其动平台可以实现一平两转混合运动,针对该机构的结构特点及动平台的位姿给出详细描述,然后构造出其运动学模型,并得到以下结论:
动平台绕x、y轴的转动将产生连带的绕Z轴的.车专动以及动平台中心点P沿X和y轴的平移,这种运动是被动产生的。
连带运动X、Y及y随岔、多的变化呈面对称分布,各滑块保持同一高度且同步移动时不产生连带运动。
3-RPS并联机构的位姿参数:(1)
①坐标系:
定坐标系:与地面故连的坐标系称为定坐标系。
动坐标系:与运动物体故连,并随其一起运动的坐标系称为动坐标系。
如图1所示:下平面为定坐标系,上平面为动坐标系,初始位置时,上下平面平行,x,y 轴在动平面内,z轴随平面动而变动,为了确定动平台在运动中对定平台的坐标,根据3-RPS 并联机构的运动特点,特采用欧拉角来描述。
②欧拉角
从动坐标系与定坐标系重合的位置,进行了3次有序的转动。
首先是xoy绕z轴转动α角,再是xoz绕y轴转动β角,最后是xoy绕z轴转动γ角。
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
参考系又称为实验室参考系,是静止不动的。
而坐标系则固定于刚体,随着刚体的旋转而旋转。
设定xyz-轴为参考系的参考轴。
称xy-平面与XY-平面的相交为交点线,用英文字母(N)代表。
zxz顺规的欧拉角可以静态地这样定义:
α是x-轴与交点线的夹角,β是z-轴与Z-轴的夹角,γ是交点线与X-轴的夹角。
③旋转矩阵:
在二维平面内任何一个点Q在空间的位置可以用Q(x,y)表示,如图3,当Q点在平面内移动任意位置到,我们可以找到两个点之间的位置关系。
cos()=coscos-sinsin
由以上联立可以得到
(2)
(3)
把式子中的连个式子关系用矩阵的方式表示出来则写成
(4)
要是把4式延伸到空间三维坐标中,由于3-TRT/SPS混合型空间并联平台机构动系在运动过程中只绕Z轴旋转,所以直接在矩阵中加入一个单位矩阵即可以得到
(5)
所以,在机构反解过程中动坐标系到定坐标系的旋转矩阵可以表示为T
(6)
由欧拉角的旋转顺序,可以得到3个有序的旋转矩阵。
设在空间坐标系xyz有一点,经旋转后得到点
,第一次绕z轴旋转得旋转矩阵,绕Y轴旋转得旋转矩阵,第二次绕z轴旋转得旋转矩阵。
(7)
(8)
(9)
旋转矩阵T:
(10)
(11)
3、3-RPS并联机构位姿解耦
由旋转矩阵的变换过程可得到球铰对定系的坐标为:
(i=1,2,3)(12)
这样ai的坐标就是关于位置参数,,,,,的函数,而这六个位姿参数中只有三个是独立的。
根据前面的分析,选择,,三个参数作为独立的输出位姿参数,其他三个参数可用这三个参数表示。
有前面分析可知,3-RPS并联平台机构的动平台不能绕起动系的轴旋转,故式(12)中的,依此可推出(13)
又由并联机构结构图可知,当3-RPS并联机构基面内转动副的轴线对中心点O呈切向分布时,机构3个分支转动副的这种位置布置限制了动平台3个球铰的运动。
三点必须在
y=0,,3个垂直平面内运动(图4)。
根据以上条件,由可推导出以下两个约束方程:
(14)
(15)
这样的坐标就可表示仅含,,三个参数的函数。
4、结束语
本章对3-RPS并联平台机构的运动性质、独立运动参数、位姿正反解进行了详细分析。
应用欧拉角描述了机构运动平台的位姿,推导出旋转矩阵及位姿的正解与反解公式,根据机构的Jacobian矩阵对机构的正解进行分析。
参考文献
[1] 付延贵,许瑛,杨光,3自由度并联机构的位姿分析,南昌航,2005.
[2] 李树军,王阴,王晓光,3-RPS并联机器人机构位置正解的杆长逼近法东北大学学报2001.
[3] 黄真,孔令富,方跃法,并联机器人机构学理论及控制.机械工业出版社,1997.。