10第十、十一章三相异步电动机的机械特性及各种运转状态分析
合集下载
第十章 三相异步电动机的机械特性及各种运转状态概要
10.3 三相异步电动机的各种运转状态
10.4 根据异步电动机的技术数据计算其参数 10.5 绕线转子异步电动机调速及制动电阻的计算 本章小结
f f §10- 1 三相异步电动机机械特性的三种表达式 n f (Tem )
1 1N
定义: ,它反映了在不同转速下,电动机所能提供的 出力(转矩)情况。
§10-2 三相异步电动机的固有机械特 性与人为机械特性
一、固有机械特性
固有机械特性是指异步电动机工作在额定电压 及额定频率下,电动机按规定的接线方式,定 子及转子中不外接电阻电容电抗时所获得的机 械特性曲线 三相异步电动机的机械特性如图10-3 所示。
Tm
n
H n0
s
sm sm
三、实用表达式
2 /s Ux R2 m1 T / s R1 ) 2 ( X 1 X 2 )2 0 ( R2
参数表达式虽然对于理论分析很有用,但其中诸多参数不可查找。
m1 Tm 0 2 R1
2 Ux
( X1 X 2 )2 R2
(10-5)
按式( 10-5)并考虑n n0 (1 s)及0=2n0 / 60 即可绘制异步电动机的机械特性,如图10-2所示
机械特性曲线中的几个特殊点: 起动状态点A (Tst ,0)
矩); 将
Tst 即起动转矩(或堵转转 :对应于转速 n 0 (或s 1 ),
s 1(或 n 0 )代入式(6-121)便可求出起动转矩为:
K st
Tst TN
(10-7)
额定运行点B
Tem 0 。
(TN , nN ) :
第十章 三相异步电动机的机械特性及各种运转状态
(10-5)
第十章 三相异步电动机的机械特性及各种运转状态
按 ( -) 考 n = n0( −s)及 0=πn0 / 60 式 10 5 并 虑 1 Ω 2 即 绘 异 电 机 机 特 , 图 -所 可 制 步 动 的 械 性 如 10 2 示
第十章 三相异步电动机的机械特性及各种运转状态 机械特性曲线中的几个特殊点: 机械特性曲线中的几个特殊点: 起动状态点A 起动状态点A
定义: 定义: 起动转矩 Tst 与额定转矩 TN 的比值定义为起动转矩倍数K st , 即:
起动转矩倍数
T Kst = st T N
(10-7)
第十章 三相异步电动机的机械特性及各种运转状态 额定运行点B 额定运行点
Tem = 0 。
(TN , nN )
:
)。由于无相对切割,该点的电磁转矩
同步运行点C 同步运行点C:对应于n = n1 (或 s = 0
C = T pmW Kw 1 1 1 2
(10-1) 10 1
−− 步 动 的 矩 数 异 电 机 转 系
Φ −−异 电 机 极 通 步 动 每 磁 m
′= I2 E′ 2 ′ ′ (R / s) + X22 2
2
−−转 电 的 算 子 流 折 值
′= cosϕ2
′ R /s 2 ′ ′ (R / s)2 + X22 2
临界运行点D 临界运行点D (Tm , S m ) :该点对应于最大电磁转矩,相应的转差率 s m 又
称为临界转差率。s m 可通过下式求得: sm = ±
R′ 2 ′ R′ +(X1 + X2)2 2
2 Ux m 1 T =± m Ω 2 ±R + R′ +(X1 + X2)2 ′ 0 1 2
第10章 三相异步电动机的机械特性及各种运转状态

2 Ux R2 m1 Tst 0 R1 R2 2 X 1 X 2 2
(四)定子电路串联对称电阻 与串联对称电抗时相同, 定子串联对称电阻一般也用于 笼型异步电动机的减压起动 。
定子电路内串联对称电阻 时的人为机械特性
sm
R2 R12 X 1 X 2
R2
转子电路串联对称电阻 适用于绕线转子异步电动机 的起动,也可用于调速。
(三)定子电路串联对称电抗
定子电路串联对称电抗 一般用于笼型异步电动机的 降压起动,以限制电动机的 起动电流。
定子电路内串联对称电抗 时的人为机械特性
sm
R2 R12 X 1 X 2
2
U x2 m1 Tm 0 2 R R 2 X X 2 1 1 2 1
2 2
s X2 R2
cos 2
m ——异步机每极磁通
二、参数表达式
cos 2 T CTJ m I 2
pm1 N1k w1 cos 2 T m I2 2
CTJ pm1 N1k w1 2
2f1N1kw1m E2
可得
s
2f1 p
二、参数表达式
R2 U m1 s T 2 0 R2 2 R1 X 1 X 2 s
2 x
三、实用表达式
Tem
s
sm
2Tm s m
s
第二节 三相异步电动机的固有机械特性与人为机械特性
一、固有机械特性
固有机械特性是指异步电动机工作在额定电压及额定频率下, 电动机按规定的接线方法接线,定子及转子电路中不外接电阻(电 抗或电容)时所获得的机械特性曲线 。 三相异步电动机的
(四)定子电路串联对称电阻 与串联对称电抗时相同, 定子串联对称电阻一般也用于 笼型异步电动机的减压起动 。
定子电路内串联对称电阻 时的人为机械特性
sm
R2 R12 X 1 X 2
R2
转子电路串联对称电阻 适用于绕线转子异步电动机 的起动,也可用于调速。
(三)定子电路串联对称电抗
定子电路串联对称电抗 一般用于笼型异步电动机的 降压起动,以限制电动机的 起动电流。
定子电路内串联对称电抗 时的人为机械特性
sm
R2 R12 X 1 X 2
2
U x2 m1 Tm 0 2 R R 2 X X 2 1 1 2 1
2 2
s X2 R2
cos 2
m ——异步机每极磁通
二、参数表达式
cos 2 T CTJ m I 2
pm1 N1k w1 cos 2 T m I2 2
CTJ pm1 N1k w1 2
2f1N1kw1m E2
可得
s
2f1 p
二、参数表达式
R2 U m1 s T 2 0 R2 2 R1 X 1 X 2 s
2 x
三、实用表达式
Tem
s
sm
2Tm s m
s
第二节 三相异步电动机的固有机械特性与人为机械特性
一、固有机械特性
固有机械特性是指异步电动机工作在额定电压及额定频率下, 电动机按规定的接线方法接线,定子及转子电路中不外接电阻(电 抗或电容)时所获得的机械特性曲线 。 三相异步电动机的
三相异步电动机的机械特性及各种运行状态
Pem m1 E2 I 2 cos 2 m1 (4.44f1 N1k w1 m ) I 2 cos 2 T 2n1 2f1 1 60 p pm1 N1k w1 m I 2 cos 2 CT m I 2 cos 2 2
(1)物理表达式 电磁转矩为:
第十章
三相异步电动机的机械特性
及各种运行状态
ห้องสมุดไป่ตู้
本章教学目的:
1、掌握异步电动机机械特性的三种表达式 2、掌握异步电动机固有机械特性与人为机械 特性及曲线画法 3、掌握异步电动机的各种运转状态计算 4、掌握调速及制动电阻计算
重点和难点:
重点:1、运转状态及其制动电阻计算 2、调速电阻计算 难点:1、运转状态分析及其制动电阻 计算 2、调速电阻推导公式
三相异步电动机固有机械特性
说明特性上的各特殊点1 (1)同步转速点A 同步转速点又称理想空载点,在该点处: s=1,n=n1,T=0,E2s=0,I2=0,I1=I0,电 动机处于理想空载状态。 (2)额定运行点B 在该点处:n=nN,T=TN,I1=I1N,I2=I2N, P2=PN,电动机处于额定运行状态。
说明特性上的各特殊点2
(3)临界点C 在该点处:s=sm,T=Tm,对应的电 磁转矩是电动机所能提供的最大转矩。 Tmˊ是异步电动机回馈制动状态所对 应的最大转矩,若忽略r1的影响时, 有T mˊ=Tm。 (4)起动点D 在该点处:s=1,n=0,T=Tst,I=Ist。
3.人为机械特性
(2)参数表达式
r2 2 r m1I 2 3 pU1 Pem s s T 2 2f1 1 r2 2 2f1 r1 x1 x2 p s
第十章 三相异步电动机的机械特性及各种运转状态(1)

第一节 机械特性的三种表达式
• 由物理表达式绘制异步电动机的机械特性曲线: • 转子电流公式→n=f(I2′) • 转子电路功率因数公式→n=f(cosφ2′) • 上述两条曲线相乘并乘以CT1Φm→n=f(T) • 表明:异步电动机的电磁转矩T, 与气隙磁通Φm和转子电流有功分 量I2′cosφ2′的乘积成正比 • 第一种表达式中,三个量在物理 上遵循左手定则——物理表达式 • 物理表达式适用于——定性分析
Tst
2 2 s R1 R2 X1 X 2
m1
2 U R2
——可见,对于绕线转子异步电动机,转子电路串联附加 电阻,可以改善起动特性
12
第一节 机械特性的三种表达式
6、起动转矩倍数 • 对于笼型转子异步电动机,转子电路不能串联附加电阻 • 为使电动机能起动,电动机须具有一定的起动转矩倍数:
22
第二节 固有机械特性与人为机械特性
4、转子电路串联对称电阻
Tst
2 2 s R1 R2 X1 X 2
m1
2 U R2
Tmax
s 2 R R 2 ( X X )2 1 1 1 2
R2
m1
2 U
sm
• 2)电源频率及电压不变,sm与Tmax近似与X1+X2′成反比 • 3)Tmax与R2′无关,sm与R2′成正比
——对于绕线转子异步电动机,当转子电路串联某一恰当 电阻RΩ时,可使sm=1(n=0),即Tst=Tmax
RΩ R12 ( X 1 X 2 )2 R2 R12 ( X 1 X 2 ) 2 R2 RΩ
Tmax KT TN
sm sN ( KT KT2 1)
三相异步电动机的机械特性与作业状况
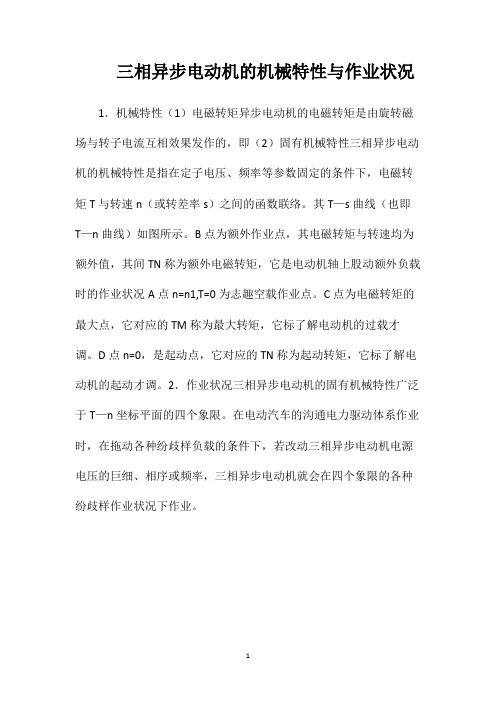
三相异步电动机的机械特性与作业状况1.机械特性(1)电磁转矩异步电动机的电磁转矩是由旋转磁场与转子电流互相效果发作的,即(2)固有机械特性三相异步电动机的机械特性是指在定子电压、频率等参数固定的条件下,电磁转矩T与转速n(或转差率s)之间的函数联络。
其T—s曲线(也即T—n曲线)如图所示。
B点为额外作业点,其电磁转矩与转速均为额外值,其间TN称为额外电磁转矩,它是电动机轴上股动额外负载时的作业状况A点n=n1,T=0为志趣空载作业点。
C点为电磁转矩的最大点,它对应的TM称为最大转矩,它标了解电动机的过载才调。
D点n=0,是起动点,它对应的TN称为起动转矩,它标了解电动机的起动才调。
2.作业状况三相异步电动机的固有机械特性广泛于T—n坐标平面的四个象限。
在电动汽车的沟通电力驱动体系作业时,在拖动各种纷歧样负载的条件下,若改动三相异步电动机电源电压的巨细、相序或频率,三相异步电动机就会在四个象限的各种纷歧样作业状况下作业。
1。
第十章三相异步电动机的机械特性及运行状态课件
第十章 三相异步电动机的机械特性及运转状态
电机及拖动基础
第十章
自动化教研室
1
第第十十章章 三三相相异异步步电电动动机机的的机机械械特特性性及及运运转转状状态态
电动机的机械特性是指转速n与转矩T之间的关系 n=f(T)。电动机作为一种将电能转化成机械能的 设备,最重要的就是电动机的机械特性。
三相异步电动机的转速n与转差率s之间存在一定
特性的物理表达式。
自动化教研室
5
第十章 三相异步电动机的机械特性及运转状态
仅从物理表达式不能明显地看出电磁转矩T与转差率 s
之间的变化规律。但可从分析转子相电流及转子功率因数 与转差率 之间的关系,间接地找出其变化规律。
a.作曲线:cos '2 f ( s )
和
I
' 2
f ( s ) 分别如图。
T st TN
n ns s nN
sm
O sm
n 1s
O1 TN T st Tmax T
(a) T=f(s)曲线
(b)
n = f(T )曲线
自动化教研室
3
第第十一章节 三三相相异异步步电电动动机机的机机械械特特性性的及三运种转表状达态式
一、物理表达式
三相异步电动机的转矩公式为:
T
CTj
m
I
' 2
cos '2
4. 定子电路串联对称电阻 (增大R1)
ns不变。 sm、Tst、Tm随Rf增大而减小。
适用于笼型电机起动,限制起动电流。(相似于降压起动)
自动化教研室
25
第5十. 转章子电三路相接异入步并电联阻动抗机(的增大机X械2、特R性2) 及运转状态
电机及拖动基础
第十章
自动化教研室
1
第第十十章章 三三相相异异步步电电动动机机的的机机械械特特性性及及运运转转状状态态
电动机的机械特性是指转速n与转矩T之间的关系 n=f(T)。电动机作为一种将电能转化成机械能的 设备,最重要的就是电动机的机械特性。
三相异步电动机的转速n与转差率s之间存在一定
特性的物理表达式。
自动化教研室
5
第十章 三相异步电动机的机械特性及运转状态
仅从物理表达式不能明显地看出电磁转矩T与转差率 s
之间的变化规律。但可从分析转子相电流及转子功率因数 与转差率 之间的关系,间接地找出其变化规律。
a.作曲线:cos '2 f ( s )
和
I
' 2
f ( s ) 分别如图。
T st TN
n ns s nN
sm
O sm
n 1s
O1 TN T st Tmax T
(a) T=f(s)曲线
(b)
n = f(T )曲线
自动化教研室
3
第第十一章节 三三相相异异步步电电动动机机的机机械械特特性性的及三运种转表状达态式
一、物理表达式
三相异步电动机的转矩公式为:
T
CTj
m
I
' 2
cos '2
4. 定子电路串联对称电阻 (增大R1)
ns不变。 sm、Tst、Tm随Rf增大而减小。
适用于笼型电机起动,限制起动电流。(相似于降压起动)
自动化教研室
25
第5十. 转章子电三路相接异入步并电联阻动抗机(的增大机X械2、特R性2) 及运转状态
10第十、十一章三相异步电动机的机械特性及各种运转状态分析

rk jxk
U1
(1)确定减压系数:
设电网允许: ' st
I
则
UN
(2) Rst(或
xst )计算:
U1
2 rk xk 2
rk Rst 2 xk2
解得:
UN
U N
2 rk xk 2
Rst
x st
1
1
2 rk2 1 2 xk rk
2 xk 1 2 rk2 xk
2018/11/4 15
第三节 三相异步电动机的起动
一、起动性能分析
起动性能分析
2018/11/4
17
起动性能分析
2018/11/4
18
二、小容量电机轻载起动——直接起动
2018/11/4
19
三、中、大容量电动机轻载起动——降压启动
2018/11/4
20
在减压起动的过程中,s=1时的起动电流为初始起动电 流,用I’st表示。相应的起动转矩为初始起动转矩T’st。
2018/11/4
35
电子式软起动器工作原理 电子式软起动器(soft starter)主要由串接于电源与被控电 机之间调压电路及其检测与控制电路构成,如图所示。
2018/11/4
图11-14 电子式软起动器的原理图
36
1).限流或恒流起动方法。用电子软起动器实现起动时限制电动机 起动电流或保持恒定的起动电流,主要用于轻载软起动; 2).斜坡电压起动法。用电子软起动实现电动机起动时定子电压由小到 大斜坡线性上升,主要用于重载软起动; 3).转矩控制起动法。用电子软起动实现电动机起动时起动转矩由小到大线性 上升,起动的平滑性好,能够降低起动时对电网的冲击,是较好的重载软起动方 法;
第十章--三相异步电动机的机械特性及各种运转状态解析PPT课件

降低电网电压对电动机运行的影响
• 额定运行时, Uφ =UN,I1=I1N,n=nN,T=TN;
• Uφ↓→I1↓, I2′↓→T↓(T<Tz)→n↓→s ↑→sE2↑
• sE2↑→I2′↑→ T↑(T=Tz时达到新的平衡)
• Uφ 下降前后负载保持额定值不变
•
T Pe
s
1
s
m1I22
R2 s
I22N
T P es m 1 sR2 sR U 122R 2 X s1X2 2
-
12
第一节 机械特性的三种表达式
• 与参数表达式对应的机械特性曲线:
T P es m 1 sR2 sR U 122R 2 X s1X2 2
2、几个重要参数 • 临界转差率——dT/ds=0
sm
R 2
R 2
R 12(X1X2 )2 X1X2
-
4
• 直流电机电力拖动的知识如何扩充到交流电机电 力拖动,交流电机的电力拖动与直流电机的电力 拖动会有什么样的共性和区别?
-
5
第一节 机械特性的三种表达式
直流电力拖动和交流电力拖动的共同问题 稳定性
机械特性和负载特性的配合 机械特性——也是指转速与转矩间的关系n=f(T),
包括:固有机械特性和人为机械特性 负载转矩特性——也是负载转矩与转速间的关系
• 1)电动机各参数及电源频率不变,Tmax与Uφ2成正比,sm则 保持不变,与Uφ无关
• 2)电源频率及电压不变,sm,Tmax近似与X1+X2′成反比 • 3)Tmax与R2′无关,sm与R2′成正比。绕线转子异步电动机,
当转子电路串联某一电阻RQ时,可使sm=1,Tst=Tmax。
R2 RQ R12(X1X2 )2
07第十、十一讲 三相异步电动机的机械特性及各种运转状态(3).
7)过载倍数KT,KT=Tm/TN; 8)飞轮惯量GD2 ( N·m2 ); 9)对于绕线转子异步电动机,还给出两个 转子数据,即
a)转子额定线电动势E2N(V); b)转子额定线电流I2N(A)。 10)对于笼型异步电动机,没有转子数据, 但给出下列两个数据
a)起动转矩倍数 Kst,Kst=Tst/TN; b)起动电流倍数K1,K1=I1st/I1N。
速与制动电阻计算
Tm KTTN
5.1 例题2 5.2 例题3 5.2 例题4
– 绕线转子每相绕组电阻R2(W)
R2
sN E2N 3I 2N
2020/10/1
6
4、根据异步电动机的技术数据计算其参数
4. 根据异步电动机的技 术数据计算其参数
4.1 异步电动机的技术数据 4.2 异步电动机的参数计算 4.3 例题1
4.3n例N=题2410rpm , h=0.878 ,
5.
c绕osj线1N式=0.异77步,电E2N动=4机95调V , I法速2N计=与4算10制A异动, 试步电用电阻工动计程机 机下算算列
5.1参例数题:2 TN,Tm,R2,k, 5.2R例2’,题R31,sm,X,X1,X2’,
5.2X例2,题I04,X0。
4.1 异步电动机的技术数据 4.2 异步电动机的参数计算 4.3 例题1
5. 绕线式异步电动机调 速与制动电阻计算
5.1 例题2 5.2 例题3 5.2 例题4
2020/10/1
➢ 异步电动机的参数计算
• 异步电动机各参数的工程计算公式
– 空载电流I0
I0 I1N sin j1N I2N sin j2N
4.3n例N=题2410rpm , h=0.878 ,
a)转子额定线电动势E2N(V); b)转子额定线电流I2N(A)。 10)对于笼型异步电动机,没有转子数据, 但给出下列两个数据
a)起动转矩倍数 Kst,Kst=Tst/TN; b)起动电流倍数K1,K1=I1st/I1N。
速与制动电阻计算
Tm KTTN
5.1 例题2 5.2 例题3 5.2 例题4
– 绕线转子每相绕组电阻R2(W)
R2
sN E2N 3I 2N
2020/10/1
6
4、根据异步电动机的技术数据计算其参数
4. 根据异步电动机的技 术数据计算其参数
4.1 异步电动机的技术数据 4.2 异步电动机的参数计算 4.3 例题1
4.3n例N=题2410rpm , h=0.878 ,
5.
c绕osj线1N式=0.异77步,电E2N动=4机95调V , I法速2N计=与4算10制A异动, 试步电用电阻工动计程机 机下算算列
5.1参例数题:2 TN,Tm,R2,k, 5.2R例2’,题R31,sm,X,X1,X2’,
5.2X例2,题I04,X0。
4.1 异步电动机的技术数据 4.2 异步电动机的参数计算 4.3 例题1
5. 绕线式异步电动机调 速与制动电阻计算
5.1 例题2 5.2 例题3 5.2 例题4
2020/10/1
➢ 异步电动机的参数计算
• 异步电动机各参数的工程计算公式
– 空载电流I0
I0 I1N sin j1N I2N sin j2N
4.3n例N=题2410rpm , h=0.878 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十章 三相异步电动机的 机械特性及各种运转状态
第一节 三相异步电动机机械特性的三种表达式 一、物理表达式
物理表达式
2018/11/4
2
二、电磁转矩的参数表达式
2018/11/4
3
机械特性曲线上的特殊点
2018/11/4
4
异步电动机的稳定运行区
2018/11/4
5
最大转矩点,过载能力
2018/11/4
Rst
;
(1)起动电流减小到直接起动时的一半;
(2)起动转矩减小到直接起动时的一半。
2018/11/4
26
解
定子星形接法时
U1N 380 Z Ω 3.68Ω 3K I I1N 3 4.4 13.6
R 0.4Z 0.4 3.68 1.47 X 0.91Z 0.91 3.68 3.35
rk jxk
U1
(1)确定减压系数:
设电网允许: ' st
I
则
UN
(2) Rst(或
xst )计算:
U1
2 rk xk 2
rk Rst 2 xk2
解得:
UN
U N
2 rk xk 2
Rst
x st
1
1
2 rk2 1 2 xk rk
2 xk 1 2 rk2 xk
(1) a 2
Rst
a 2 1X 2 a 2 R 2
R
( 2 2 1 3.35 2 2 2 1.47 2 1.47 )Ω 5Ω
(2) b 2
Rst
(
b 1X 2 bR 2
R
1.47 ) 2.46
27
2 1 3.35 2 2 1.47 2
2018/11/4
2.自耦补偿起动
异步电动机自耦补偿 起动的原理线路图
U x N2 U N1
I x N2 I st N1
Ix Ux I st U
I1 N 2 I x N1
2
所以
I1 N 2 I st N1
自耦变压器的 减压原理图
2018/11/4
通过自耦变压器,从电网吸 取的电流降低为 2 N2 N2 I1 Ix I st 28 N1 N1
定子电路内串联对称电阻 时的人为机械特性
2018/11/4
14
(五)转子电路接入并联阻抗 由于转子电路参 数可变,如果参数配合 恰当,电动机在整个加 速过程中产生几乎恒定 的转矩,在右图上绘出 了这样的人为机械特性。
转子电路接入并联阻抗时 的电路图和人为机械特性
转子电路接入并联阻抗 时的转子等效电路图
1)起始点A; 2)额定工作点B; 3)同步转速点H; 4)最大转矩点P和P′。
2018/11/4
11
二、人为机械特性
2018/11/4
12
三相异步电动机降低定子 相电压时的人为机械特性
(一)降低
Ux
U x 降低后电动机电流将大于
额定值,电动机如长时连续运行, 最终温升将超过允许值,导致电 动机寿命缩短,甚至烧坏。 (二)转子电路内串联对称电阻 转子电路串联对称电阻 适用于绕线转子异步电动机 的起动,也可用于调速。
6
关于最大转矩的几点重要结论
ห้องสมุดไป่ตู้
2018/11/4
7
起动电流,起动转矩
2018/11/4
8
起动转矩的几点结论
2018/11/4
9
三、电磁转矩的实用公式
2018/11/4
10
第二节 三相异步电动机的固有机械特性
与人为机械特性
一、固有机械特性
固有机械特性是指异步电动机工作在额定电压及额定频率下, 电动机按规定的接线方法接线,定子及转子电路中不外接电阻(电 抗或电容)时所获得的机械特性曲线 。
2018/11/4
电机绕组电压减小系数 电网电流减小系数 2 转矩减小系数 电机电流减小系数
25
[例11-1]
一笼型异步电动机的电压为380V;电流为13.6A;起动电流倍数
K I 4.4 ;起动转矩倍数 K st 3 ,试就下列两种情况,求定子串
接电阻
转子电路内串联对称电阻 时的人为机械特性
2018/11/4
13
(三)定子电路串联对称电抗
定子电路串联对称电抗 一般用于笼型异步电动机的 降压起动,以限制电动机的 起动电流。 (四)定子电路串联对称电阻 与串联对称电抗时相同, 定子串联对称电阻一般也用于 笼型异步电动机的减压起动 。
定子电路内串联对称电抗 时的人为机械特性
2018/11/4 15
第三节 三相异步电动机的起动
一、起动性能分析
起动性能分析
2018/11/4
17
起动性能分析
2018/11/4
18
二、小容量电机轻载起动——直接起动
2018/11/4
19
三、中、大容量电动机轻载起动——降压启动
2018/11/4
20
在减压起动的过程中,s=1时的起动电流为初始起动电 流,用I’st表示。相应的起动转矩为初始起动转矩T’st。
2018/11/4 21
常用的降压启动方法
2018/11/4
22
1.电阻减压或电抗减压起动
笼型异步电动机电阻 减压起动的原理图
笼型异步电动机电抗 减压起动的原理图
2018/11/4
23
定子电阻与电抗的计算
U1 U N
I I st
' st
Rst
I st I st I st k I I N
当s=1时,若忽略Im,则I1=I’st=-I2’
初始电流有效值为: I
' st
2 r1 r2 2 x1 x2
U1
U1 ZK
UN 堵转电流: I st ZK
' I 因此有: st U1 I st U N
(减压系数)
Tst' 2Tst
' 因此要满足 I st I st 只要使得 U1 U N 就可以达到减小起 动电流的目的。
自耦变压器起动的特点
电机绕组电压减小系数 2 电网电流减小系数 2 转矩减小系数 电机电流减小系数
24
同理:
2018/11/4
• rk和xk可根据铭牌进行估算:
UN UN Zk 3I KN 3k I I N
Zk
UN I KN
UN 3 kI I N 3
rk (0.25(大电机) ~ 0.4(小电机))Z k
xk Z r
2 k
2 k
• 串电阻或串电抗起动的特点
第一节 三相异步电动机机械特性的三种表达式 一、物理表达式
物理表达式
2018/11/4
2
二、电磁转矩的参数表达式
2018/11/4
3
机械特性曲线上的特殊点
2018/11/4
4
异步电动机的稳定运行区
2018/11/4
5
最大转矩点,过载能力
2018/11/4
Rst
;
(1)起动电流减小到直接起动时的一半;
(2)起动转矩减小到直接起动时的一半。
2018/11/4
26
解
定子星形接法时
U1N 380 Z Ω 3.68Ω 3K I I1N 3 4.4 13.6
R 0.4Z 0.4 3.68 1.47 X 0.91Z 0.91 3.68 3.35
rk jxk
U1
(1)确定减压系数:
设电网允许: ' st
I
则
UN
(2) Rst(或
xst )计算:
U1
2 rk xk 2
rk Rst 2 xk2
解得:
UN
U N
2 rk xk 2
Rst
x st
1
1
2 rk2 1 2 xk rk
2 xk 1 2 rk2 xk
(1) a 2
Rst
a 2 1X 2 a 2 R 2
R
( 2 2 1 3.35 2 2 2 1.47 2 1.47 )Ω 5Ω
(2) b 2
Rst
(
b 1X 2 bR 2
R
1.47 ) 2.46
27
2 1 3.35 2 2 1.47 2
2018/11/4
2.自耦补偿起动
异步电动机自耦补偿 起动的原理线路图
U x N2 U N1
I x N2 I st N1
Ix Ux I st U
I1 N 2 I x N1
2
所以
I1 N 2 I st N1
自耦变压器的 减压原理图
2018/11/4
通过自耦变压器,从电网吸 取的电流降低为 2 N2 N2 I1 Ix I st 28 N1 N1
定子电路内串联对称电阻 时的人为机械特性
2018/11/4
14
(五)转子电路接入并联阻抗 由于转子电路参 数可变,如果参数配合 恰当,电动机在整个加 速过程中产生几乎恒定 的转矩,在右图上绘出 了这样的人为机械特性。
转子电路接入并联阻抗时 的电路图和人为机械特性
转子电路接入并联阻抗 时的转子等效电路图
1)起始点A; 2)额定工作点B; 3)同步转速点H; 4)最大转矩点P和P′。
2018/11/4
11
二、人为机械特性
2018/11/4
12
三相异步电动机降低定子 相电压时的人为机械特性
(一)降低
Ux
U x 降低后电动机电流将大于
额定值,电动机如长时连续运行, 最终温升将超过允许值,导致电 动机寿命缩短,甚至烧坏。 (二)转子电路内串联对称电阻 转子电路串联对称电阻 适用于绕线转子异步电动机 的起动,也可用于调速。
6
关于最大转矩的几点重要结论
ห้องสมุดไป่ตู้
2018/11/4
7
起动电流,起动转矩
2018/11/4
8
起动转矩的几点结论
2018/11/4
9
三、电磁转矩的实用公式
2018/11/4
10
第二节 三相异步电动机的固有机械特性
与人为机械特性
一、固有机械特性
固有机械特性是指异步电动机工作在额定电压及额定频率下, 电动机按规定的接线方法接线,定子及转子电路中不外接电阻(电 抗或电容)时所获得的机械特性曲线 。
2018/11/4
电机绕组电压减小系数 电网电流减小系数 2 转矩减小系数 电机电流减小系数
25
[例11-1]
一笼型异步电动机的电压为380V;电流为13.6A;起动电流倍数
K I 4.4 ;起动转矩倍数 K st 3 ,试就下列两种情况,求定子串
接电阻
转子电路内串联对称电阻 时的人为机械特性
2018/11/4
13
(三)定子电路串联对称电抗
定子电路串联对称电抗 一般用于笼型异步电动机的 降压起动,以限制电动机的 起动电流。 (四)定子电路串联对称电阻 与串联对称电抗时相同, 定子串联对称电阻一般也用于 笼型异步电动机的减压起动 。
定子电路内串联对称电抗 时的人为机械特性
2018/11/4 15
第三节 三相异步电动机的起动
一、起动性能分析
起动性能分析
2018/11/4
17
起动性能分析
2018/11/4
18
二、小容量电机轻载起动——直接起动
2018/11/4
19
三、中、大容量电动机轻载起动——降压启动
2018/11/4
20
在减压起动的过程中,s=1时的起动电流为初始起动电 流,用I’st表示。相应的起动转矩为初始起动转矩T’st。
2018/11/4 21
常用的降压启动方法
2018/11/4
22
1.电阻减压或电抗减压起动
笼型异步电动机电阻 减压起动的原理图
笼型异步电动机电抗 减压起动的原理图
2018/11/4
23
定子电阻与电抗的计算
U1 U N
I I st
' st
Rst
I st I st I st k I I N
当s=1时,若忽略Im,则I1=I’st=-I2’
初始电流有效值为: I
' st
2 r1 r2 2 x1 x2
U1
U1 ZK
UN 堵转电流: I st ZK
' I 因此有: st U1 I st U N
(减压系数)
Tst' 2Tst
' 因此要满足 I st I st 只要使得 U1 U N 就可以达到减小起 动电流的目的。
自耦变压器起动的特点
电机绕组电压减小系数 2 电网电流减小系数 2 转矩减小系数 电机电流减小系数
24
同理:
2018/11/4
• rk和xk可根据铭牌进行估算:
UN UN Zk 3I KN 3k I I N
Zk
UN I KN
UN 3 kI I N 3
rk (0.25(大电机) ~ 0.4(小电机))Z k
xk Z r
2 k
2 k
• 串电阻或串电抗起动的特点