Matlab摄像头基本操作
Matlab摄像机标定+畸变校正

Matlab摄像机标定+畸变校正博客转载⾃:本⽂⽬的在于记录如何使⽤MATLAB做摄像机标定,并通过opencv进⾏校正后的显⽰。
⾸先关于校正的基本知识通过OpenCV官⽹的介绍即可简单了解:对于摄像机我们所关⼼的主要参数为摄像机内参,以及⼏个畸变系数。
上⾯的连接中后半部分也给了如何标定,然⽽OpenCV⾃带的标定程序稍显繁琐。
因⽽在本⽂中我主推使⽤MATLAB的⼯具箱。
下⾯让我们开始标定过程。
标定板标定的最开始阶段最需要的肯定是标定板。
两种⽅法,直接从opencv官⽹上能下载到:⽅法⼆:逼格满满(MATLAB)J = (checkerboard(300,4,5)>0.5);figure, imshow(J);采集数据那么有了棋盘格之后⾃然是需要进⾏照⽚了。
不多说,直接上程序。
按q键即可保存图像,尽量把镜头的各个⾓度都覆盖好。
#include "opencv2/opencv.hpp"#include <string>#include <iostream>using namespace cv;using namespace std;int main(){VideoCapture inputVideo(0);//inputVideo.set(CV_CAP_PROP_FRAME_WIDTH, 320);//inputVideo.set(CV_CAP_PROP_FRAME_HEIGHT, 240);if (!inputVideo.isOpened()){cout << "Could not open the input video " << endl;return -1;}Mat frame;string imgname;int f = 1;while (1) //Show the image captured in the window and repeat{inputVideo >> frame; // readif (frame.empty()) break; // check if at endimshow("Camera", frame);char key = waitKey(1);if (key == 27)break;if (key == 'q' || key == 'Q'){imgname = to_string(f++) + ".jpg";imwrite(imgname, frame);}}cout << "Finished writing" << endl;return0;}保存⼤约15到20张即可。
matlab中stereo camera calibrator参数

matlab中stereo camera calibrator参数在计算机视觉中,立体相机校准是一个关键步骤,它用于建立相机的内部参数和相机的畸变模型。
这些参数对于后续的立体视觉测量、三维重建和目标检测等任务非常重要。
在MATLAB中,StereoCamera Calibrator工具箱提供了相机校准功能。
在本文档中,我们将详细介绍Stereo Camera Calibrator工具箱中的主要参数。
一、相机参数设置1. 输入图像:在使用Stereo Camera Calibrator之前,需要提供两幅或多幅图像作为输入。
这些图像应该具有相同的视角和照明条件。
2. 相机模型:Stereo Camera Calibrator支持多种相机模型,包括针孔相机模型、鱼眼相机模型和单应性矩阵等。
根据实际需求选择合适的相机模型。
3. 畸变矫正:Stereo Camera Calibrator可以自动检测并校正相机的畸变。
通过校正畸变,可以获得更准确的相机内部参数和畸变系数。
二、校准步骤1. 图像对齐:Stereo Camera Calibrator首先需要对两幅输入图像进行对齐,以确保它们具有相同的坐标系。
2. 特征检测:Stereo Camera Calibrator使用特征检测算法,如SIFT、SURF或FAST等,从输入图像中提取关键点和描述符。
这些特征用于校准过程中的匹配和优化过程。
3. 校准参数优化:通过使用优化算法,如最小二乘法或BFGS算法等,Stereo Camera Calibrator可以找到最优的相机内部参数和畸变系数。
三、主要参数说明1. `IntrinsicMatrix`:输入图像的内在矩阵,即不考虑畸变和视角变化的相机成像矩阵。
2. `R` 和 `T`:相机的旋转和平移矩阵,用于描述相机的外部几何关系。
3. `K` 和 `D`:相机内参和畸变系数。
内参包括焦距、光心坐标等,而畸变系数描述了实际图像与理想图像之间的畸变差异。
相机标定方法 matlab

相机标定方法 matlab相机标定是计算机视觉中的重要部分之一,它是通过测量图像上的物体点和其在相机坐标系下对应的点坐标,来估算相机内部参数和外部参数的过程。
相机内部参数通常包括焦距、主点位置和畸变参数等,它们决定了图像中的物体大小和位置。
相机外部参数包括相机的旋转和平移参数,它们决定了物体在相机坐标系下的坐标。
在 MATLAB 中,相机标定是通过图像处理工具箱中的“camera calibration”函数实现的。
在执行相机标定之前,需要准备一组称为标定板的物体,并在不同位置和姿态下拍摄多个图像。
标定板可以是长方形或正方形的棋盘格,也可以是自定义形状的物体,但是必须有已知的三维坐标和相应的二维坐标对。
以下是一个基本的相机标定流程,详细介绍了如何使用 MATLAB 实现相机标定。
1. 准备标定板需要准备一个标定板。
标定板可以是一个黑白棋盘格或自定义形状的物体。
在这里,我们将使用一个 9x7 的黑白棋盘格。
2. 采集标定图像接下来,需要拍摄多个标定图像,并记录标定板在每个图像中的位置和姿态。
对于每个图像,需要至少拍摄 10 张,以确保图像的质量和特征的稳定性。
可以使用不同的相机设置,例如不同的焦距、光圈和曝光时间等,来捕捉标定板的不同姿态。
3. 读取图像和标定板角点在 MATLAB 中,可以使用“imageDatastore”函数读取标定图像并创建一个图像数据存储对象。
接下来,可以使用“detectCheckerboardPoints”函数来检测标定板上的角点。
这个函数会返回一个 Nx2 的矩阵,其中 N 是标定板上检测到的角点数。
4. 定义标定板上角点的空间坐标现在需要定义标定板上角点的空间坐标。
这些坐标可以使用“generateCheckerboardPoints”函数自动生成。
该函数会返回一个 Nx3 的矩阵,其中N 是标定板上的角点数,每一行代表一个角点的空间坐标。
5. 进行相机标定用于相机标定的主要函数是“cameraCalibration”函数。
在MATLAB中使用海康工业相机
在MATLAB中使用海康工业相机前言此文档介绍如何对MATLAB进行配置,从而使海康的GigE和USB相机可以在MATLAB 中进行使用。
介绍通过Image Acquisition Toolbox, Simulink, Sripts三种方式来对接相机,实现相机参数的配置和取流。
此文使用MATLAB R2015a (8.5.0.197613)64-bit版本为例,其他版本会有一些不同,具体操作请根据具体情况进行调整。
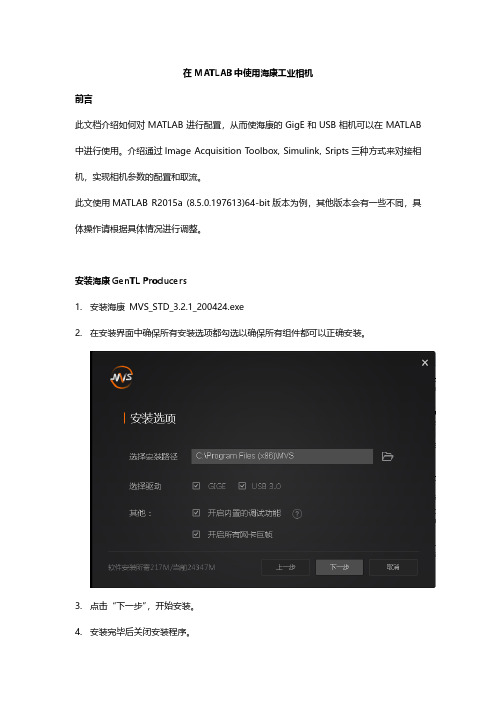
安装海康GenTL Producers1.安装海康MVS_STD_3.2.1_200424.exe2.在安装界面中确保所有安装选项都勾选以确保所有组件都可以正确安装。
3.点击“下一步”,开始安装。
4.安装完毕后关闭安装程序。
配置MATLAB GenTL 环境1.打开MATLAB,点击上方的APPS。
查看是否已安装了Image Acquisition app.2.如果Image Acquisition没有安装,需要回到Home页面打开Add-Ons->GetHardware Support Packages.3.选择Install from Internet.4.在列表中找到Image Acquisition进行安装。
5.确认是否已在MATLAB中安装了GenTL环境。
在MATLAB的Command Window中输入imaqhwinfo。
如果installedAdaptors中没有gentl,则需要安装gentl。
6.打开Home->Add-Ons->Get Hardware Support Packages.选择GenIcamInterface并安装。
在Image Acquisition中使用海康相机1.打开APPS->Image Acquisition。
所有可使用的GigE与USB相机都将会被显示在Hardware Browser中。
2.当展开相机后,相机中所支持的像素格式将会显示出来。
Matlab摄像机标定工具箱的使用说明
摄像机标定工具箱Matlab 摄像机标定工具箱工具箱下载:说明文档:安装:将下载的工具箱文件解压缩,将目录toolbox_calib 拷贝到Matlab 的目录下。
采集图像:采集的图像统一命名后,拷贝到toolbox_calib 目录中。
命名规则为基本名和编号,基本名在前,后面直接跟着数字编号。
编号最多为3位十进制数字。
1.1.1 标定模型内参数标定采用的模型如式(1-1)所示,Brown 畸变模型式(1-2)所示。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11//100011100c c in c c c c ys x y x M z y z x v k u k k v u (1-1) 式中:(u , v )是特征点的图像坐标,(x c , y c , z c )是特征点在摄像机坐标系的坐标,k x 、k y 是焦距归一化成像平面上的成像点坐标到图像坐标的放大系数,k s 是对应于图像坐标u 、v 的摄像机的x 、y 轴之间不垂直带来的耦合放大系数,(u 0, v 0)是光轴中心点的图像坐标即主点坐标,(x c 1, y c 1)是焦距归一化成像平面上的成像点坐标。
k s =c k x ,c 是摄像机的实际y 轴与理想y 轴之间的夹角,单位为弧度。
⎪⎩⎪⎨⎧++++++=++++++=1142123654221112124113654221112)2()1()2(2)1(c c c c c c c c c d c c c c c c c c c c d c y x k y r k r k r k r k y y x r k y x k r k r k r k x x (1-2) 式中:(x c 1d , y c 1d )是焦距归一化成像平面上的成像点畸变后的坐标,k c 1是2阶径向畸变系数,k c 2是4阶径向畸变系数,k c 5是6阶径向畸变系数,k c 3、k c 4是切向畸变系数,r 为成像点到摄像机坐标系原点的距离,r 2= x c 12 + y c 12。
Matlab摄像机标定工具箱的使用说明

摄像机标定工具箱1.1 Matlab 摄像机标定工具箱工具箱下载:/bouguetj/calib_doc/download/index.html说明文档:/bouguetj/calib_doc/安装:将下载的工具箱文件toolbox_calib.zip 解压缩,将目录toolbox_calib 拷贝到Matlab 的目录下。
采集图像:采集的图像统一命名后,拷贝到toolbox_calib 目录中。
命名规则为基本名和编号,基本名在前,后面直接跟着数字编号。
编号最多为3位十进制数字。
1.1.1 标定模型内参数标定采用的模型如式(1-1)所示,Brown 畸变模型式(1-2)所示。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11//100011100c c in c c c c ys x y x M z y z x v k u k k v u (1-1) 式中:(u , v )是特征点的图像坐标,(x c , y c , z c )是特征点在摄像机坐标系的坐标,k x 、k y 是焦距归一化成像平面上的成像点坐标到图像坐标的放大系数,k s 是对应于图像坐标u 、v 的摄像机的x 、y 轴之间不垂直带来的耦合放大系数,(u 0, v 0)是光轴中心点的图像坐标即主点坐标,(x c 1, y c 1)是焦距归一化成像平面上的成像点坐标。
k s =αc k x ,αc 是摄像机的实际y 轴与理想y 轴之间的夹角,单位为弧度。
⎪⎩⎪⎨⎧++++++=++++++=1142123654221112124113654221112)2()1()2(2)1(c c c c c c c c c d c c c c c c c c c c d c y x k y r k r k r k r k y y x r k y x k r k r k r k x x (1-2) 式中:(x c 1d , y c 1d )是焦距归一化成像平面上的成像点畸变后的坐标,k c 1是2阶径向畸变系数,k c 2是4阶径向畸变系数,k c 5是6阶径向畸变系数,k c 3、k c 4是切向畸变系数,r 为成像点到摄像机坐标系原点的距离,r 2= x c 12 + y c 12。
Matlab中的相机标定与三维重建方法
Matlab中的相机标定与三维重建方法相机标定和三维重建是计算机视觉领域中非常重要的技术,可以广泛应用于机器人导航、虚拟现实、增强现实等领域。
Matlab作为一种功能强大的科学计算软件,提供了丰富的图像处理和计算机视觉工具箱,可以方便地实现相机标定和三维重建。
1. 相机标定方法在进行相机标定之前,我们首先需要了解相机的内外参数。
相机的内参数包括焦距、主点坐标、像素大小等,而外参数则包括相机的位置和姿态。
标定的目的就是通过一组已知的特征点对相机的内外参数进行估计。
在Matlab中,可以使用相机标定工具箱进行相机标定。
这个工具箱提供了多种标定方法,包括基于平面模型的标定方法、基于球面模型的标定方法、基于立体标定方法等。
其中最常用的是基于平面模型的标定方法,即利用多个平面上的特征点进行标定。
在标定过程中,我们需要采集一系列的图像,对每张图像进行角点检测,并记录每个角点的像素坐标。
然后,通过最小二乘法或优化算法估计相机的内外参数。
在Matlab中,可以使用函数calibrateCamera来完成相机标定,该函数会自动计算相机的内外参数,并给出标定结果的评估指标。
2. 三维重建方法相机标定完成后,我们可以利用标定的结果对图像进行三维重建。
三维重建的目的是通过多个视角下的图像来恢复物体的三维形状和位置。
在Matlab中,可以使用视觉几何工具箱进行三维重建。
该工具箱提供了多种三维重建算法,包括三角剖分法、立体视觉法、稀疏点云法等。
其中最常用的是稀疏点云法,即通过对特征点进行匹配,估计它们在三维空间中的位置。
在三维重建过程中,我们首先需要对多个视角下的图像进行特征提取和匹配。
然后,通过三角测量或最小二乘法估计特征点在三维空间中的位置。
最后,可以使用点云可视化工具将估计的三维点云进行可视化。
3. 实例应用相机标定和三维重建在很多领域都有广泛的应用。
例如,在机器人导航中,我们可以利用相机标定和三维重建来估计机器人的位置和周围环境的三维形状,从而实现自主导航。
matlab双目标定

matlab双目标定双目标定是指对双目相机进行标定,确定相机的内外参数,以及双目相机之间的基线长度和相对位置关系。
相机标定是计算机视觉和机器视觉中的一个重要问题,对于进行立体视觉和三维重建非常有意义。
在Matlab中,可以使用Computer Vision Toolbox提供的函数来实现双目相机的标定。
以下是一个基本的双目目标定流程:1. 数据采集:首先需要采集双目相机的图像对,要求图像对中有特征点可以提取和匹配。
可以使用立体标定板作为特征点,也可以使用其他适合的标定物。
图像采集过程中注意保持相机不动,同时改变相机的视角和位置,以便覆盖不同角度和深度的场景。
2. 特征点提取:使用特征提取算法(如Harris角点检测、SIFT、SURF等)来提取图像中的特征点。
在双目标定中,需要提取的是两个相机图像对中共有的特征点。
3. 特征点匹配:对于提取到的特征点进行匹配,找出两个相机图像对中特征点之间的对应关系。
可以使用基于距离的匹配算法(如最近邻匹配、k最近邻匹配等)。
4. 相机标定:使用标定函数对双目相机进行标定,计算出相机的内外参数。
在Matlab中可以使用stereoCameraCalibrator函数进行标定。
该函数需要输入特征点的像素坐标和物理世界坐标,根据特征点的对应关系计算出相机的内外参数。
5. 结果评估:标定完成后,可以使用estereoParameters函数获取相机的内外参数。
可以使用这些参数进行立体视觉、三维重建等应用。
同时,还可以使用reprojectionErrors函数评估标定结果的误差。
总结:双目相机标定是计算机视觉和机器视觉中的一个重要问题。
Matlab提供了很多函数用于实现双目标定,如特征点提取和匹配,相机标定等。
使用这些函数可以较容易地完成双目相机的标定,并用于后续的双目视觉任务。
matlab相机标定过程
matlab相机标定过程相机标定是计算机视觉领域中一项非常重要的技术。
它是指通过使用已知的特征点对相机进行标定,以便计算图像中某一点的真实位置。
在matlab中,相机标定的过程可以分为以下几个步骤:1. 特征点提取首先,我们需要在一组图片中提取出可以使用的特征点。
这些特征点通常是指具有稳定性和表征性等特点的点,例如边缘和角点等。
2. 特征点匹配在提取出特征点后,我们需要将这些特征点进行匹配。
我们可以使用一些特征匹配算法来实现这个过程,例如SIFT和SURF等算法。
3. 相机参数计算在完成了特征点匹配后,我们可以开始计算相机的内部参数和外部参数。
在matlab中,我们可以使用相机标定工具箱来实现这个过程。
该工具箱包含了多个相机标定模型,例如针孔模型、方位模型和宽角模型等。
4. 相机校正完成相机参数计算后,我们需要使用相机校正来优化相机的参数。
相机校正通常分为两种方法:单应性矩阵校正和直线校正。
在matlab中,我们可以使用相机标定工具箱中的cv.calibrateCamera2函数来实现相机校正。
5. 评估和验证最后,我们需要评估和验证相机标定的结果。
我们可以使用相机标定工具箱中的cv.evaluateCameraMatrix函数来评估相机的标定精度,并使用cv.undistort函数将输入图像与校正后的图像进行比较。
总结matlab中的相机标定过程可以帮助我们计算相机的内部参数和外部参数,以便计算图像中某一点的真实位置。
在执行相机标定时,我们需要完成特征点提取、特征点匹配、相机参数计算、相机校正以及评估和验证等几个步骤。
通过这些步骤,我们可以得出准确的相机标定结果,为后续的计算机视觉任务提供有力的支持。
matlab调用摄像头的代码

matlab调用摄像头的代码
在MATLAB中调用摄像头可以使用MATLAB自带的Image Acquisition Toolbox。
首先,确保你已经安装了这个工具箱。
接下来,你可以按照以下步骤进行操作:
步骤1,创建视频输入对象。
你可以使用以下代码创建一个视频输入对象:
matlab.
vid = videoinput('winvideo', 1, 'RGB24_640x480');
其中,'winvideo'是指定使用Windows平台的视频输入适配器,1是指定摄像头的设备ID,'RGB24_640x480'是指定视频格式和分辨率。
步骤2,预览视频。
使用以下代码可以预览摄像头捕获的视频:
matlab.
preview(vid);
步骤3,捕获图像。
你可以使用以下代码从摄像头捕获图像:
matlab.
img = getsnapshot(vid);
步骤4,显示图像。
最后,你可以使用以下代码来显示捕获的图像:
matlab.
imshow(img);
需要注意的是,在使用完摄像头后,记得释放摄像头资源,可
以使用以下代码来完成释放操作:
matlab.
delete(vid);
以上就是在MATLAB中调用摄像头的基本代码。
当然,根据具体的需求,你还可以对图像进行处理、保存视频等操作。
希望这些信息能够帮助到你。
Matlab摄像头基本操作..
Matlab摄像头基本操作分类:matlab(机器人视觉SLAM项目)2012-09-26 09:48529人阅读评论(0) 收藏举报matlabinputparametersimagevideopropertiesMatlab中的图像获取工具箱给我们提供了必要的函数,我们直接调用就可以了。
在在这帖中我们主要就是简单的介绍如何使用该工具箱进行对USB2.0摄像头的编程废话不多说,我们开始言归正传了。
但是一定记住你必须安装了PC摄像头才可以进行下面的东西,如果说首次安装摄像头最好重启下PC,否则可能出现没法识别摄像头。
整个过程我们需要做如下几件事情:1、查询USB2.0Camera 的具体参数(imaqhwinfo)2、创建视频输入对象(videoinput)3、图像预览和显示(preview、stoppreview、closepreview和image)4、获取视频图像(getsnapshot)5、图像获取设备的获取和设置(get和set)6、关闭视频对象(delete)在正式讲解之前,我想说明下几个个在图像获取工具箱中的术语:图像获取设备:比如摄像头、扫描仪图像获取适配器:主要的目的是通过驱动在Matlab和图像获取设备之间传递信息ROI:region-of-interest 感兴趣区域在说说几个常用的函数,我们这里只是说明它的作用,具体如何使用参考帮助系统getselectedsourceimaqfindisvalidpeekdatagetdataimaqmontage给我们一个摄像头我们必须知道他的相关参数,才可能进行我们的编程下。
当然我们可以查询商家手册,但是那个累不累人呀。
Matlab的图像获取工具箱为我提供了imaqhwinfo(),来获取PC上以安装的图像获取硬件信息没有输入参数时,返回一个结构体,它包含了系统中存在的适配器和Matlab相关的版本信息(第一次我们一般使用这个)代码:>> info=imaqhwinfoinfo =InstalledAdaptors:{'coreco' 'winvideo'}%这里可以看到我的PC上安装了两个适配器MATLABVersion: '7.6 (R2008a)'ToolboxName: 'Image AcquisitionToolbox'ToolboxVersion: '3.1 (R2008a)'有输入参数的时候,返回一个结构体,包含了指定的适配器的数据信息代码:>> win_info=imaqhwinfo('winvideo')%我们看看第二适配器的具体参数win_info =AdaptorDllName: [1x81 char]%适配器dll文件绝对路径AdaptorDllVersion: '3.1 (R2008a)'%适配器dll文件版本AdaptorName: 'winvideo'%s适配器名称 DeviceIDs: {[1]}%设备ID号,这个我们经常需要用到DeviceInfo: [1x1 struct]%设备信息,这里主要是图像获取设备的一些参数,比较重要%====================下面我们了解下,这个图像获取设备到底有哪些的详细信息吧====================>> win_info.DeviceIDsans =[1]>> dev_win_info=win_info.DeviceInfodev_win_info =DefaultFormat: 'RGB24_320x240'%获取图片的默认格式DeviceFileSupported: 0DeviceName: 'USB PC CAMERA P227'%设备名称DeviceID: 1%设备号ObjectConstructor:'videoinput('winvideo', 1)'%对象构建方式,这个绝大部分都是一样的SupportedFormats: {1x12 cell}%获取的图像支持格式,一般都有好多种,上面的DefaultFormat只是默认格式而已%==================================看看图像获取设备支持的图像格式==================================>> dev_win_info.SupportedFormats%可以看到我的PC上的摄像头支持下面12中图片格式ans =Columns 1 through 5'I420_160x120' 'I420_176x144' 'I42 0_320x240' 'I420_352x288' 'I420_640x480'Columns 6 through 9'RGB24_1280x960' 'RGB24_160x120' ' RGB24_176x144' 'RGB24_320x240'Columns 10 through 12'RGB24_352x288' 'RGB24_640x480' 'RGB24_800x600'视频预览、采集和保存(1)创建视频输入对象obj = videoinput(adaptorname,deviceID,format)adaptorname:适配器名称,首次可以使用不带参数的imaqhwinfo函数获取deviceID:设备ID号,首次可以通过imaqhwinfo函数获取format:视频采集格式,可以通过DeviceInfo的SupportedFormats获取,不填写则使用默认格式代码:>> obj =videoinput('winvideo',1,'RGB24_320x240')%这里我们使用默认的视频采集格式Summary of Video Input Object Using 'USB PCCAMERA P227'.Acquisition Source(s): input1 isavailable.Acquisition Parameters: 'input1' is thecurrent selected source.10 frames pertrigger using the selected source.'RGB24_320x240' video data to be logged upon START.Grabbing first ofevery 1 frame(s).Log data to'memory' on trigger.Trigger Parameters: 1 'immediate'trigger(s) on START.Status: Waiting for START.0 frames acquiredsince starting.0 frames availablefor GETDATA.(2)打开视频预览窗口himage=preview(obj,himage)obj:视频采集对象himage:视频预览窗口对应的句柄,也就是说在指定的句柄对象中预览视频,该参数可以空缺至于预览窗口的关闭和停止可以使用colsepreview和stoppreview函数代码:vidRes = get(obj, 'VideoResolution');nBands = get(obj, 'NumberOfBands');figure()%指定预览窗体显示的figureaxes()%指定预览窗口显示的坐标系hImage = image( zeros(vidRes(2), vidRes(1),nBands) );preview(obj, hImage);(3)图像捕捉、显示和保存代码:%frame是H×W×B的矩阵。
使用Matlab进行标定与定位的技巧

使用Matlab进行标定与定位的技巧引言:随着计算机技术的不断进步,标定与定位在现代科学研究与工程应用中变得越来越重要。
而Matlab作为一种广泛应用于科学计算的工具,被广泛应用于标定与定位的研究与开发中。
本文将介绍使用Matlab进行标定与定位的技巧,包括标定理论和方法、定位算法与模型等。
一、标定理论与方法1.1 相机标定相机标定是进行摄像机内外参数确定和畸变纠正的过程。
在Matlab中,可以使用Camera Calibration Toolbox进行相机标定操作。
首先,需要准备一些用于标定的图像,这些图像中应包含已知参数(例如标定板大小和格点数)的标定板。
然后,在Matlab中加载图像数据,使用标定板图像来标定相机并求解相机内外参数。
1.2 IMU标定惯性测量单元(IMU)通常包括加速度计和陀螺仪等多种传感器。
IMU标定的目的是确定IMU的误差模型,以便在后续的定位中进行误差补偿。
在Matlab中,可以使用传感器标定和估计工具箱进行IMU标定操作。
首先,需要设计一套标定实验,包括旋转和加速度等多个运动过程。
然后,使用这些实验数据来标定IMU的误差模型。
二、定位算法与模型2.1 基于测距的定位基于测距的定位是通过测量到达定位节点的信号传播时间或信号强度等信息来实现的。
在Matlab中,可以使用距离测量数据进行多边定位或三边定位。
多边定位是通过测量到多个定位节点的距离信息来确定目标位置,可以使用最小二乘法等进行求解。
三边定位是通过测量到三个定位节点的距离信息来确定目标位置,可以使用三角测量法进行求解。
2.2 基于惯性导航的定位惯性导航是利用IMU等传感器测量物体的加速度和角速度等信息进行定位和导航的方法。
在Matlab中,可以使用十字光束法进行惯性导航定位。
首先,需要根据IMU数据求解出物体的位置、速度和姿态等信息。
然后,通过十字光束法计算出相对定位误差,从而实现精确定位。
2.3 基于地标的定位基于地标的定位是通过识别已知地标进行定位的方法。
使用Matlab进行图像拍摄与图像处理的实践方法
使用Matlab进行图像拍摄与图像处理的实践方法1. 引言人类对于图像的处理和分析,一直是科学和技术领域中的重要课题。
随着数字图像处理技术的不断发展,Matlab成为了研究者们图像处理的利器。
本文将探讨如何使用Matlab进行图像拍摄与图像处理,以帮助读者更好地理解并应用这一工具。
2. 图像拍摄图像拍摄是获取数字图像的第一步。
在拍摄过程中,摄影师需要注意一些关键因素,例如光线条件、曝光时间和焦距等。
Matlab提供了图像采集工具箱,可以与数码相机或摄像机相连,并实时获取图像数据。
通过该工具箱,用户可以调整曝光时间、白平衡和对焦等设置,以满足实际需求。
3. 图像处理预处理图像拍摄后,图像预处理是必不可少的一步。
预处理可以帮助提高图像质量,并减少后续处理的复杂度。
Matlab提供了一系列的图像处理函数,可以实现预处理任务,例如灰度化、平滑滤波和直方图均衡化等。
通过这些函数,用户可以根据需要调整图像的亮度、对比度和细节等参数,以获取更好的效果。
4. 图像处理主要技术图像处理主要包括图像增强、图像复原和图像分割等技术。
Matlab提供了丰富的工具箱和函数,可以实现这些技术的应用。
例如,Matlab中的imadjust函数可以对图像进行亮度和对比度调整,imfilter函数可以实现各种滤波操作,imsharpen函数可以增强图像的边缘和细节等。
通过灵活使用这些函数,用户可以根据实际情况选择合适的方法,并通过实验不断优化处理结果。
5. 图像处理案例为了更好地理解和应用Matlab进行图像处理,下面将介绍一个实际的案例:人脸识别。
人脸识别是一种常见的图像处理应用,可以应用于安防系统、人机交互和身份认证等领域。
Matlab提供了人脸检测工具箱和人脸识别工具箱,可以帮助用户进行人脸检测和特征提取等操作。
用户可以通过这些工具箱,选择适当的算法和参数,实现人脸识别任务。
在具体实现过程中,用户需要先采集包含多张人脸的图像样本,并建立人脸数据库。
matlab摄像头视频获取和保存
MA TLAB 摄像头视频获取和保存分类:MA TLAB 2013-07-04 12:15 1489人阅读评论(0) 收藏举报MA TLAB 摄像头视频获取和保存一、读取摄像头视频如题目,首先你需要有一个摄像头(usb或者本本自带的都可以)并且安装好了驱动,保证设备可以正常使用。
先来段简单的通过MA TLAB显示摄像头视频的代码:1 vid = videoinput('winvideo',1);2 preview(vid);通过上面两段代码就可以看到摄像头里面的画面。
第1代码是通过videoinput()创建视频输入对象,第2行显示所创建的视频对象,就这么简单是不。
看到的画面是彩色的吧,如果想体验一下熊猫的视觉观怎么办。
加命令呗:set(vid,'ReturnedColorSpace','grayscale');变回原来的彩色世界,只需要把set 里面设置属性的参数‘grayscale’改为‘rgb’就OK。
set(vid,'ReturnedColorSpace','grayscale');二、获取某时刻摄像头中的画面直接上代码:1 frame = getsnapshot(vid);2 figure;imshow(frame);getsnapshot(vid)得到表示视频对象vid当前时刻画面的图像矩阵。
三、保存视频保存视频的原理其实是把摄像头中各个时刻的画面连接起来组成视频,然后对其进行保存。
复制代码1 writerObj = VideoWriter( [filename '.avi'] );2 writerObj.FrameRate = N;3 open(writerObj);45 figure;6 for ii = 1: nframe7 frame = getsnapshot(vid);8 imshow(frame);9 f.cdata = frame;10 f.colormap = [];11 writeV ideo(writerObj,f);12 end1314 close(writerObj);复制代码第1行中通过V ideoWriter()函数创建filename.avi 的视频文件,第二行设置视频文件的帧率(每秒钟的帧数)。
相机标定matlab 畸变k3
相机标定matlab 畸变k3相机标定是在计算机视觉中非常重要的一个环节,它能够帮助我们准确地估计出相机的内参和外参,从而在图像处理和机器视觉领域中实现更加准确和优秀的结果。
在进行相机标定时,需要针对相机的畸变参数进行校准,其中k3是一个常见的畸变参数。
下面,我将对相机标定的过程以及k3的相关问题进行详细解释。
相机标定的过程相机标定的过程可以分为两个主要部分:内参标定和外参标定。
内参标定的目标是确定相机内部的参数,包括焦距、主点位置、像素大小等;而外参标定则是确定相机的姿态,包括旋转矩阵、平移向量等。
在进行标定时,需要使用一组已知大小的棋盘格图像,并且保证棋盘格的角点在图像中能够被准确地检测到。
在进行特定的变换矩阵计算时,需要使用特定的标定算法,其中常用的一个算法就是Zhang的标定算法。
具体而言,该算法使用多组不同位置的图像,并对棋盘格的角点进行精确标记,从而得到相机内参矩阵和畸变系数。
k3畸变问题在进行相机标定时,需要考虑的一个非常重要的问题就是相机的畸变问题。
畸变是由于相机镜头内部的光路不完全均匀导致的,会导致误差增加,从而影响图像处理结果。
而其中一个畸变参数,k3,是描述了相机的高阶径向畸变,通常情况下k3很小,但是在一些特定情况下也会很大,需要进行较为精确的校准。
为了准确估计k3,需要使用多组标定数据进行标定,从而得到更加准确的内参和畸变系数,同时可以使用matlab等计算机软件对数据进行处理和计算。
综合而言,相机标定是一项非常重要的计算机视觉技术,能够为图像处理和机器视觉领域提供更加准确和可靠的算法和方法。
同时,在进行相机标定时,需要考虑到畸变问题,特别是一些高阶径向畸变,如k3参数,需要进行精确的校准和估计,从而得到更加准确的结果。
matlab双目相机标定的旋转矩阵2

双目相机标定是计算机视觉领域中的重要技术之一。
在双目视觉系统中,相机标定是指确定相机内参和外参的过程,其中旋转矩阵是相机外参中的重要参数之一。
本文将针对Matlab中双目相机标定的旋转矩阵进行详细介绍。
1. 双目相机标定简介双目相机是指由两个摄像头组成的相机系统,用于获取场景的立体信息。
在利用双目相机进行立体视觉处理前,需要对相机进行标定,以确定相机的内部参数(如焦距、光心等)和外部参数(如旋转矩阵、平移矩阵等)。
双目相机标定的目的是为了将左右两个相机的图像像素坐标映射到同一实际世界坐标系中,从而实现立体视觉的后续处理。
2. 旋转矩阵的作用旋转矩阵是描述相机之间相对旋转关系的重要参数之一,它可以帮助我们理解相机的旋转姿态,从而更好地进行立体视觉处理。
在双目相机标定中,我们需要确定两个相机之间的旋转矩阵,以便进行后续的立体匹配、三维重建等操作。
3. Matlab中的双目相机标定Matlab是一款功能强大的科学计算软件,在计算机视觉领域也有着广泛的应用。
Matlab提供了一些用于双目相机标定的工具和函数,能够帮助用户快速准确地完成双目相机标定过程。
在Matlab中,可以利用Camera Calibrator App或者使用calibrateStereoCamera函数来进行双目相机标定,其中会得到双目系统的内参矩阵、畸变系数以及外参矩阵等参数。
4. 双目相机标定的旋转矩阵计算在Matlab中,标定双目相机的旋转矩阵通常是通过calibrateStereoCamera函数得到的外参矩阵来计算的。
在得到外参矩阵后,可以通过以下步骤来计算旋转矩阵:(1)将外参矩阵分解为旋转矩阵和平移矩阵。
这可以通过Matlab中的dposeProjectionMatrix函数来实现。
(2)得到的旋转矩阵可以表示为一个3x3的矩阵,用于描述相机之间的相对旋转关系。
在计算旋转矩阵时,通常需要对其进行进一步的调整和处理,以确保其满足我们的需求。
matlab双目标定注意事项

matlab双目标定注意事项在Matlab中进行双目摄像机标定时,有一些重要的注意事项,以确保标定的准确性和可靠性。
以下是一些建议和注意事项:1. 使用高质量的标定板:选择一个高质量的标定板,它的角点应当清晰可辨认,且板的平整度和稳定性对标定结果有重要影响。
通常,使用棋盘格作为标定板是一种常见的选择。
2. 采用多个角点:在标定图像中使用足够多的角点,这有助于提高标定的准确性。
尽量让标定板填满整个图像。
3. 多角度拍摄:在不同的角度和方向拍摄标定图像,以确保标定结果对摄像机的各种位置和方向变化都具有鲁棒性。
4. 确保图像质量:确保图像的清晰度和对比度足够,避免过曝光或欠曝光的情况。
可采用相机参数进行调整,如曝光时间、光圈等。
5. 使用相同的标定板:在进行双目摄像机标定时,确保两个相机使用相同的标定板。
这是因为两个相机的标定板在三维空间中应当有一一对应的关系。
6. 采用相同的相机设置:在标定过程中,确保两个相机使用相同的设置,如焦距、光圈、曝光时间等。
7. 校准相机内参:在进行标定之前,最好先对每个相机进行单独的内参标定,以确保相机参数的准确性。
Matlab提供了`cameraParameters`对象,可以用于保存相机内参。
8. 使用Matlab的`stereoCameraCalibrator`工具箱:Matlab提供了用于双目相机标定的工具箱,其中包括`stereoCameraCalibrator`应用程序。
这个工具可以帮助你在一个交互式环境中进行标定,提供了图形界面来查看标定结果和误差等信息。
9. 考虑径向和切向畸变:标定时考虑畸变参数,特别是径向畸变和切向畸变。
在Matlab 中,可以通过`cameraParameters`对象来存储这些畸变参数。
10. 检查标定结果:在标定完成后,仔细检查标定结果,查看重投影误差等指标,确保标定的准确性。
以上建议和注意事项应当帮助你更好地进行Matlab中的双目摄像机标定。
Matlab摄像头基本操作
Matlab摄像头基本操作分类:matlab(机器人视觉SLAM项目)2012-09-26 09:48529人阅读评论(0) 收藏举报matlabinputparametersimagevideopropertiesMatlab中的图像获取工具箱给我们提供了必要的函数,我们直接调用就可以了。
在在这帖中我们主要就是简单的介绍如何使用该工具箱进行对USB2.0摄像头的编程废话不多说,我们开始言归正传了。
但是一定记住你必须安装了PC摄像头才可以进行下面的东西,如果说首次安装摄像头最好重启下PC,否则可能出现没法识别摄像头。
整个过程我们需要做如下几件事情:1、查询USB2.0Camera 的具体参数(imaqhwinfo)2、创建视频输入对象(videoinput)3、图像预览和显示(preview、stoppreview、closepreview和image)4、获取视频图像(getsnapshot)5、图像获取设备的获取和设置(get和set)6、关闭视频对象(delete)在正式讲解之前,我想说明下几个个在图像获取工具箱中的术语:图像获取设备:比如摄像头、扫描仪图像获取适配器:主要的目的是通过驱动在Matlab和图像获取设备之间传递信息ROI:region-of-interest 感兴趣区域在说说几个常用的函数,我们这里只是说明它的作用,具体如何使用参考帮助系统getselectedsourceimaqfindisvalidpeekdatagetdataimaqmontage给我们一个摄像头我们必须知道他的相关参数,才可能进行我们的编程下。
当然我们可以查询商家手册,但是那个累不累人呀。
Matlab的图像获取工具箱为我提供了imaqhwinfo(),来获取PC上以安装的图像获取硬件信息没有输入参数时,返回一个结构体,它包含了系统中存在的适配器和Matlab相关的版本信息(第一次我们一般使用这个)代码:>> info=imaqhwinfoinfo =InstalledAdaptors:{'coreco' 'winvideo'}%这里可以看到我的PC上安装了两个适配器MATLABVersion: '7.6 (R2008a)'ToolboxName: 'Image AcquisitionToolbox'ToolboxVersion: '3.1 (R2008a)'有输入参数的时候,返回一个结构体,包含了指定的适配器的数据信息代码:>> win_info=imaqhwinfo('winvideo')%我们看看第二适配器的具体参数win_info =AdaptorDllName: [1x81 char]%适配器dll文件绝对路径AdaptorDllVersion: '3.1 (R2008a)'%适配器dll文件版本AdaptorName: 'winvideo'%s适配器名称 DeviceIDs: {[1]}%设备ID号,这个我们经常需要用到DeviceInfo: [1x1 struct]%设备信息,这里主要是图像获取设备的一些参数,比较重要%====================下面我们了解下,这个图像获取设备到底有哪些的详细信息吧====================>> win_info.DeviceIDsans =[1]>> dev_win_info=win_info.DeviceInfodev_win_info =DefaultFormat: 'RGB24_320x240'%获取图片的默认格式DeviceFileSupported: 0DeviceName: 'USB PC CAMERA P227'%设备名称DeviceID: 1%设备号ObjectConstructor:'videoinput('winvideo', 1)'%对象构建方式,这个绝大部分都是一样的SupportedFormats: {1x12 cell}%获取的图像支持格式,一般都有好多种,上面的DefaultFormat只是默认格式而已%==================================看看图像获取设备支持的图像格式==================================>> dev_win_info.SupportedFormats%可以看到我的PC上的摄像头支持下面12中图片格式ans =Columns 1 through 5'I420_160x120' 'I420_176x144' 'I42 0_320x240' 'I420_352x288' 'I420_640x480'Columns 6 through 9'RGB24_1280x960' 'RGB24_160x120' ' RGB24_176x144' 'RGB24_320x240'Columns 10 through 12'RGB24_352x288' 'RGB24_640x480' 'RGB24_800x600'视频预览、采集和保存(1)创建视频输入对象obj = videoinput(adaptorname,deviceID,format)adaptorname:适配器名称,首次可以使用不带参数的imaqhwinfo函数获取deviceID:设备ID号,首次可以通过imaqhwinfo函数获取format:视频采集格式,可以通过DeviceInfo的SupportedFormats获取,不填写则使用默认格式代码:>> obj =videoinput('winvideo',1,'RGB24_320x240')%这里我们使用默认的视频采集格式Summary of Video Input Object Using 'USB PCCAMERA P227'.Acquisition Source(s): input1 isavailable.Acquisition Parameters: 'input1' is thecurrent selected source.10 frames pertrigger using the selected source.'RGB24_320x240' video data to be logged upon START.Grabbing first ofevery 1 frame(s).Log data to'memory' on trigger.Trigger Parameters: 1 'immediate'trigger(s) on START.Status: Waiting for START.0 frames acquiredsince starting.0 frames availablefor GETDATA.(2)打开视频预览窗口himage=preview(obj,himage)obj:视频采集对象himage:视频预览窗口对应的句柄,也就是说在指定的句柄对象中预览视频,该参数可以空缺至于预览窗口的关闭和停止可以使用colsepreview和stoppreview函数代码:vidRes = get(obj, 'VideoResolution');nBands = get(obj, 'NumberOfBands');figure()%指定预览窗体显示的figureaxes()%指定预览窗口显示的坐标系hImage = image( zeros(vidRes(2), vidRes(1),nBands) );preview(obj, hImage);(3)图像捕捉、显示和保存代码:%frame是H×W×B的矩阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Matlab摄像头基本操作分类:matlab(机器人视觉SLAM项目)2012-09-26 09:48529人阅读评论(0) 收藏举报matlabinputparametersimagevideopropertiesMatlab中的图像获取工具箱给我们提供了必要的函数,我们直接调用就可以了。
在在这帖中我们主要就是简单的介绍如何使用该工具箱进行对USB2.0摄像头的编程废话不多说,我们开始言归正传了。
但是一定记住你必须安装了PC摄像头才可以进行下面的东西,如果说首次安装摄像头最好重启下PC,否则可能出现没法识别摄像头。
整个过程我们需要做如下几件事情:1、查询USB2.0Camera 的具体参数(imaqhwinfo)2、创建视频输入对象(videoinput)3、图像预览和显示(preview、stoppreview、closepreview和image)4、获取视频图像(getsnapshot)5、图像获取设备的获取和设置(get和set)6、关闭视频对象(delete)在正式讲解之前,我想说明下几个个在图像获取工具箱中的术语:图像获取设备:比如摄像头、扫描仪图像获取适配器:主要的目的是通过驱动在Matlab和图像获取设备之间传递信息ROI:region-of-interest 感兴趣区域在说说几个常用的函数,我们这里只是说明它的作用,具体如何使用参考帮助系统getselectedsourceimaqfindisvalidpeekdatagetdataimaqmontage给我们一个摄像头我们必须知道他的相关参数,才可能进行我们的编程下。
当然我们可以查询商家手册,但是那个累不累人呀。
Matlab的图像获取工具箱为我提供了imaqhwinfo(),来获取PC上以安装的图像获取硬件信息没有输入参数时,返回一个结构体,它包含了系统中存在的适配器和Matlab相关的版本信息(第一次我们一般使用这个)代码:>> info=imaqhwinfoinfo =InstalledAdaptors:{'coreco' 'winvideo'}%这里可以看到我的PC上安装了两个适配器MATLABVersion: '7.6 (R2008a)'ToolboxName: 'Image AcquisitionToolbox'ToolboxVersion: '3.1 (R2008a)'有输入参数的时候,返回一个结构体,包含了指定的适配器的数据信息代码:>> win_info=imaqhwinfo('winvideo')%我们看看第二适配器的具体参数win_info =AdaptorDllName: [1x81 char]%适配器dll文件绝对路径AdaptorDllVersion: '3.1 (R2008a)'%适配器dll文件版本AdaptorName: 'winvideo'%s适配器名称 DeviceIDs: {[1]}%设备ID号,这个我们经常需要用到DeviceInfo: [1x1 struct]%设备信息,这里主要是图像获取设备的一些参数,比较重要%====================下面我们了解下,这个图像获取设备到底有哪些的详细信息吧====================>> win_info.DeviceIDsans =[1]>> dev_win_info=win_info.DeviceInfodev_win_info =DefaultFormat: 'RGB24_320x240'%获取图片的默认格式DeviceFileSupported: 0DeviceName: 'USB PC CAMERA P227'%设备名称DeviceID: 1%设备号ObjectConstructor:'videoinput('winvideo', 1)'%对象构建方式,这个绝大部分都是一样的SupportedFormats: {1x12 cell}%获取的图像支持格式,一般都有好多种,上面的DefaultFormat只是默认格式而已%==================================看看图像获取设备支持的图像格式==================================>> dev_win_info.SupportedFormats%可以看到我的PC上的摄像头支持下面12中图片格式ans =Columns 1 through 5'I420_160x120' 'I420_176x144' 'I42 0_320x240' 'I420_352x288' 'I420_640x480'Columns 6 through 9'RGB24_1280x960' 'RGB24_160x120' ' RGB24_176x144' 'RGB24_320x240'Columns 10 through 12'RGB24_352x288' 'RGB24_640x480' 'RGB24_800x600'视频预览、采集和保存(1)创建视频输入对象obj = videoinput(adaptorname,deviceID,format)adaptorname:适配器名称,首次可以使用不带参数的imaqhwinfo函数获取deviceID:设备ID号,首次可以通过imaqhwinfo函数获取format:视频采集格式,可以通过DeviceInfo的SupportedFormats获取,不填写则使用默认格式代码:>> obj =videoinput('winvideo',1,'RGB24_320x240')%这里我们使用默认的视频采集格式Summary of Video Input Object Using 'USB PCCAMERA P227'.Acquisition Source(s): input1 isavailable.Acquisition Parameters: 'input1' is thecurrent selected source.10 frames pertrigger using the selected source.'RGB24_320x240' video data to be logged upon START.Grabbing first ofevery 1 frame(s).Log data to'memory' on trigger.Trigger Parameters: 1 'immediate'trigger(s) on START.Status: Waiting for START.0 frames acquiredsince starting.0 frames availablefor GETDATA.(2)打开视频预览窗口himage=preview(obj,himage)obj:视频采集对象himage:视频预览窗口对应的句柄,也就是说在指定的句柄对象中预览视频,该参数可以空缺至于预览窗口的关闭和停止可以使用colsepreview和stoppreview函数代码:vidRes = get(obj, 'VideoResolution');nBands = get(obj, 'NumberOfBands');figure()%指定预览窗体显示的figureaxes()%指定预览窗口显示的坐标系hImage = image( zeros(vidRes(2), vidRes(1),nBands) );preview(obj, hImage);(3)图像捕捉、显示和保存代码:%frame是H×W×B的矩阵。
H图像高度,由ROIPosition 指定;w图像宽度,由ROIPosition指定;B索线个数,由NumberOfBands指定frame = getsnapshot(obj);imshow(frame);imwrite(fame,'snap.jpg','jpg');实验步骤1、查询USB2.0Camera 的具体参数输入 imaqInfo = imaqhwinfo返回信息InstalledAdaptors: {'winvideo'} MATLABVersion: '7.1 (R14SP3)' ToolboxName: 'Image Acquisition Toolbox' ToolboxVersion: '1.9 (R14SP3)'输入imaqInfo.InstalledAdaptors返回信息ans ='winvideo'输入winvideoinfo = imaqhwinfo('winvideo') 返回信息winvideoinfo =AdaptorDllName: [1x76 char] AdaptorDllVersion: '1.9 (R14SP3)' AdaptorName: 'winvideo'DeviceIDs: {[1]}DeviceInfo: [1x1 struct]输入 winvideoinfo.DeviceInfo返回信息ans =DefaultFormat: 'YUY2_160x120' DeviceFileSupported: 0DeviceName: 'USB 视频设备'DeviceID: 1ObjectConstructor: 'videoinput('winvideo', 1)' SupportedFormats: {1x5 cell}输入device1 = winvideoinfo.DeviceInfo(1)返回信息device1 =DefaultFormat: 'YUY2_160x120' DeviceFileSupported: 0DeviceName: 'USB 视频设备'DeviceID: 1ObjectConstructor: 'videoinput('winvideo', 1)' SupportedFormats: {1x5 cell}输入device1.DeviceName返回信息ans =USB 视频设备输入device1.DeviceID返回信息ans =1输入device1.DefaultFormat返回信息ans =YUY2_160x120输入device1.SupportedFormats返回信息Columns 1 through 4'YUY2_160x120' 'YUY2_176x144' 'YUY2_320 x240' 'YUY2_352x288'Column 5'YUY2_640x480'2、最简单采集实验,输入如下代码,可以得到预览下的默认格式的摄像头捕捉窗口obj=videoinput('winvideo',1); preview(obj);3、输入如下代码vidobj = videoinput('winvideo',1,'YUY2_640x480'); sources = vidobj.Source;whos sourcesset(vidobj,'SelectedSourceName','input1'); sourcesselectedsrc = getselectedsource(vidobj); get(selectedsrc);delete(vidobj);clear vidobj;返回信息Name SizeBytes Classsources 1x1726 videosource object Grand total is 30 elements using 726 bytes Display Summary for Video Source Object: Index: SourceName: Selected:1 'input1' 'on' General Settings:Parent = [1x1 videoinput]Selected = onSourceName = input1Tag =Type = videosourceDevice Specific Properties: BacklightCompensation = onBrightness = -16Contrast = 120FrameRate = 30.0000Gamma = 60Hue = 0Saturation = 40Sharpness = 34、输入如下代码clc;clf;clear all;imaqmem(30000000); %申请内存空间%ADAPTOR:MATLAB与视频设备之间的接口,主要的目的是传递信息vid = videoinput('winvideo', 1, 'YUY2_640x480'); preview(vid);start(vid);h=figure('NumberTitle','off','Name','视频',...'MenuBar','none','color','c',...'Position', [0, 0, 1, 1], 'Visible','on'); %新建窗口set(h,'doublebuffer','on','outerposition',get(0,'sc reensize'));h1=axes('Position', [0.02, 0.1, 0.4,0.8],'Parent',h); %新建显示窗口hold on;axis off;while ishandle(h) %判断是否有效的图像对象句柄a=getsnapshot (vid); % 捕获图像flushdata(vid); %清除数据获取引擎的所有数据、置属性SamplesAvailable为0imshow(a);%显示图像drawnow;% 实时更新图像end;delete(vid);matlab视频工具箱常用函数窗体顶端窗体顶端视频显示vision.DeployableVideoPlayer发送视频数据到电脑屏幕上vision.VideoPlayer播放视频或显示图像序列视频文件I / Ovision.BinaryFileReader读取视频数据从二进制文件vision.BinaryFileWriter写入二进制视频数据文件vision.VideoFileReader浏览视频和/或从一个视频文件的音频取样vision.VideoFileWriter视频帧写入到视频文件和音频样本特征检测,提取和匹配MSERRegions对象的存储MSER区域SURFPoints对象的存储SURF兴趣点vision.BoundaryTracer跟踪对象的二进制图像边界vision.CornerDetector角的度量矩阵和角点检测vision.EdgeDetector查找图像中的物体边缘目标检测vision.CascadeObjectDetector检测对象的使用的维奥拉- 琼斯算法运动分析和跟踪vision.BlockMatcher估计图像或视频帧之间的运动vision.ForegroundDetector检测采用高斯混合模型的前景vision.HistogramBasedTracker基于直方图的对象跟踪vision.OpticalFlow估计物体的速度vision.TemplateMatcher图像中找到模板分析与增强vision.ContrastAdjuster调整图像的对比度,线性缩放vision.Deinterlacer删除运动伪影的隔行扫描视频输入信号vision.Histogram EqualizerEnhance对比度的图像,使用直方图均衡化vision.MedianFilter二维中值滤波转换vision.Autothresholder转换强度图像二值图像vision.ChromaResampler缩减像素采样或上采样图像的色度分量vision.ColorSpaceConverter色彩空间之间转换颜色信息vision.DemosaicInterpolator拜耳模式的图像转换为真彩色vision.GammaCorrector应用或删除伽玛校正,图像或视频流vision.ImageComplementer在二进制或强度图像的像素值的补vision.ImageDataTypeConverter转换和缩放输入图像到指定的输出数据类型过滤integralKernel积分图像过滤器vision.Convolver计算2-D离散卷积的两个输入矩阵vision.ImageFilter执行2-D FIR滤波的输入矩阵vision.MedianFilter二维中值滤波几何变换vision.GeometricRotator指定的角度旋转图像vision.GeometricScaler放大或缩小图像尺寸vision.GeometricShearer Shift键的行或列的图像线性变化的偏移vision.GeometricTransformer应用投影或仿射变换的图像vision.GeometricTransform EstimatorEstimate几何变换的匹配点对vision.GeometricTranslator翻译在二维平面上的图像,使用位移矢量形态学操作vision.ConnectedComponentLabeler标签和计算连通区域的二值图像vision.MorphologicalBottomHat底帽滤波图像vision.MorphologicalClose图像进行形态闭vision.MorphologicalDilate对图像进行形态学膨胀vision.MorphologicalErode上的图像进行形态学腐蚀vision.MorphologicalOpen图像进行形态开vision.Morphological TopHatTop帽子图像过滤统计vision.Autocorrelator计算2-D输入自相关矩阵vision.BlobAnalysis属性连通区域vision.Crosscorrelator 2-D剖面的两个输入矩阵的相关性vision.Histogram生成直方图的每个输入matrixvision.LocalMaximaFinder查找本地最大矩阵vision.Maximum查找输入或输入序列中的最大值vision.Mean输入或输入序列的平均值vision.Median查找中值在输入vision.Minimum查找最低值在输入或输入序列vision.PSNR计算峰值信号的信噪比(PSNR)的图像之间的vision.StandardDeviation查找标准偏差的输入或输入序列vision.Variance查找在输入或输入序列的变异值文本和图形vision.AlphaBlender将图像,叠加图像,或突出显示选定的像素vision.MarkerInserter输出图像上绘制标记vision.ShapeInserter绘制矩形,线,多边形或圆形图像上vision.TextInserter绘制文本,图像或视频流变换vision.DCT计算2-D离散余弦变换vision.FFT两维离散付里叶变换vision.HoughLines查找rho沸石和θ对所描述的线的笛卡尔坐标vision.HoughTransform查找图像中的线,通过Hough变换vision.IDCT计算2-D的逆离散余弦变换vision.IFFT二维离散傅立叶逆变换vision.Pyramid执行高斯金字塔分解定义新的系统对象matlab.System系统对象的基类getDiscreteStateImpl离散状态的属性值getNumInputsImpl号码的输入参数传递步骤和设置方法getNumOutputsImpl返回的输出两步法isInactivePropertyImpl活动或不活动标志的属性matlab.system.mixin.FiniteSource有限源mixin类isDoneImplEnd的数据标志processTunedPropertiesImpl时的动作调谐特性的变化releaseImpl释放资源resetImplReset系统对象的状态setProperties设置属性值的名称- 值对输入setupImpl初始化系统对象stepImpl系统输出和状态更新方程matlab.system.StringSet一套有效的字符串值validateInputsImpl验证输入步骤方法validatePropertiesImpl验证属性值实用工具vision.ImagePadder垫或作物输入图像沿其行,列,或两者兼而有之復原編輯窗体底端Video Displayvision.DeployableVideoPlayer Send video data to computer screen vision.VideoPlayer Play video or display image sequencesVideo File I/Ovision.BinaryFileReader Read video data from binary files vision.BinaryFileWriter Write binary video data to files vision.VideoFileReader Read video and/or audio samples from a video filevision.VideoFileWriter Write video frames and audio samples to video fileFeature Detection, Extraction, and MatchingMSERRegions Object for storing MSER regionsSURFPoints Object for storing SURF interest pointsvision.BoundaryTracer Trace object boundaries in binary images vision.CornerDetector Corner metric matrix and corner detector vision.EdgeDetector Find edges of objects in imagesObject Detectionvision.CascadeObjectDetector Detect objects using the Viola-Jone s algorithmMotion Analysis and Trackingvision.BlockMatcher Estimate motion between images or video fr amesvision.ForegroundDetector Detects foreground using Gaussian mixt ure modelsvision.HistogramBasedTracker Histogram-based object tracking vision.OpticalFlow Estimate object velocitiesvision.TemplateMatcher Locate template in imageAnalysis & Enhancementvision.ContrastAdjuster Adjust image contrast by linear scaling vision.Deinterlacer Remove motion artifacts by deinterlacing input video signalvision.Histogram EqualizerEnhance contrast of images using hist ogram equalizationvision.MedianFilter 2D median filteringConversionsvision.Autothresholder Convert intensity image to binary image vision.ChromaResampler Downsample or upsample chrominance compon ents of imagesvision.ColorSpaceConverter Convert color information between col or spacesvision.DemosaicInterpolator Bayer-pattern image conversion to tr ue colorvision.GammaCorrector Apply or remove gamma correction from im ages or video streamsvision.ImageComplementer Complement of pixel values in binary or intensity imagevision.ImageDataTypeConverter Convert and scale input image to specified output data typeFilteringintegralKernel Integral image filtervision.Convolver Compute 2-D discrete convolution of two input matricesvision.ImageFilter Perform 2-D FIR filtering of input matrix vision.MedianFilter 2D median filteringGeometric Transformationsvision.GeometricRotator Rotate image by specified anglevision.GeometricScaler Enlarge or shrink image sizevision.GeometricShearer Shift rows or columns of image by lin early varying offsetvision.GeometricTransformer Apply projective or affine transform ation to imagevision.GeometricTransform EstimatorEstimate geometric transformati on from matching point pairsvision.GeometricTranslator Translate image in two-dimensional pl ane using displacement vectorMorphological Operationsvision.ConnectedComponentLabeler Label and count the connected regions in a binary imagevision.MorphologicalBottomHat Bottom-hat filtering on image vision.MorphologicalClose Perform morphological closing on image vision.MorphologicalDilate Perform morphological dilation on an imagevision.MorphologicalErode Perform morphological erosion on an i magevision.MorphologicalOpen Perform morphological opening on an im agevision.Morphological TopHatTop-hat filtering on imageStatisticsvision.Autocorrelator Compute 2-D autocorrelation of input matr ixvision.BlobAnalysis Properties of connected regionsvision.Crosscorrelator 2-D cross-correlation of two input matri cesvision.Histogram Generate histogram of each inputmatrixvision.LocalMaximaFinder Find local maxima in matrices vision.Maximum Find maximum values in input or sequence of i nputsvision.Mean Find mean value of input or sequence of inputs vision.Median Find median values in an inputvision.Minimum Find minimum values in input or sequence of i nputsvision.PSNR Compute peak signal-to-noise ratio (PSNR) between imagesvision.StandardDeviation Find standard deviation of input or s equence of inputsvision.Variance Find variance values in an input or sequence of inputsText & Graphicsvision.AlphaBlender Combine images, overlay images, or highligh t selected pixelsvision.MarkerInserter Draw markers on output imagevision.ShapeInserter Draw rectangles, lines, polygons, or circl es on imagesvision.TextInserter Draw text on image or video stream Transformsvision.DCT Compute 2-D discrete cosine transformvision.FFT Two-dimensional discrete Fourier transformvision.HoughLines Find Cartesian coordinates of lines that a re described by rho and theta pairsvision.HoughTransform Find lines in images via Hough transform vision.IDCT Compute 2-D inverse discrete cosine transform vision.IFFT Two–dimensional inverse discrete Fourier transformvision.Pyramid Perform Gaussian pyramid decompositionDefine New System Objectsmatlab.System Base class for System objectsgetDiscreteStateImpl Discrete state property values getNumInputsImpl Number of input arguments passed to step and setup methodsgetNumOutputsImpl Number of outputs returned by step method isInactivePropertyImpl Active or inactive flag for properties matlab.system.mixin.FiniteSource Finite source mixin class isDoneImplEnd-of-data flagprocessTunedPropertiesImpl Action when tunable properties change releaseImpl Release resourcesresetImplReset System object statessetProperties Set property values from name-value pair inputs setupImpl Initialize System objectstepImpl System output and state update equationsmatlab.system.StringSet Set of valid string values validateInputsImpl Validate inputs to step method validatePropertiesImpl Validate property valuesUtilitiesvision.ImagePadder Pad or crop input image along its rows, columns, or both。