边缘检测和SnakeModel结合的轮廓识别
边缘检测及拟合-概述说明以及解释
边缘检测及拟合-概述说明以及解释1.引言1.1 概述边缘检测及拟合是图像处理和计算机视觉领域中重要的技术研究方向,旨在从图像中提取出物体或目标的边缘信息,并进一步对边缘进行拟合和分析。
通过边缘检测和拟合,可以实现诸如物体检测、轮廓提取、目标跟踪、三维重构等多种计算机视觉任务。
边缘是指图像中灰度或颜色变化剧烈的区域。
边缘检测的目标是在图像中准确地标记和定位出这些边缘。
边缘检测是计算机视觉中常用的技术,具有广泛的应用领域,例如机器人导航、图像识别、医学影像处理等。
通过边缘检测,我们可以对图像进行分割,从而将图像分成不同的区域,方便后续处理。
边缘拟合是对图像中的边缘进行曲线或直线拟合的过程。
通过对边缘进行拟合,可以得到更加平滑的边缘曲线或直线,从而更好地描述物体的形状和轮廓。
边缘拟合广泛应用于图像重建、形状分析、目标识别等领域,能够提高边缘的准确性和鲁棒性。
边缘检测和拟合是紧密相连的两个过程,相互影响并共同完成对图像边缘的提取和分析。
边缘检测是边缘拟合的基础,而边缘拟合可以通过拟合来修正和优化边缘检测的结果。
在实际应用中,边缘检测和拟合经常需要同时进行,相互补充来提高整体的效果和精度。
本文将对边缘检测和拟合的概念进行介绍,并总结常用的方法和应用领域。
同时还会重点探讨边缘检测与拟合的关系,包括相互影响、综合应用以及未来的研究方向。
通过深入研究边缘检测及拟合的原理和方法,我们可以更好地理解图像的结构和特征,为计算机视觉和图像处理领域的相关应用提供有力支持。
文章结构部分的内容可以如下所示:1.2 文章结构本文分为引言、正文和结论三部分。
- 引言部分介绍了边缘检测及拟合的相关概念和研究意义,并对文章的结构进行了概述。
- 正文部分包括了边缘检测和边缘拟合两个主要部分。
- 边缘检测部分主要介绍了边缘检测的概念、常用方法和应用领域。
- 边缘拟合部分主要介绍了边缘拟合的概念、拟合方法和实际应用。
- 边缘检测与拟合的关系部分探讨了二者之间的相互影响,以及如何综合应用边缘检测和拟合方法,并给出了拓展研究方向的建议。
snake模型工作原理

Snake模型算法的基本思想数学模型及工作原理Snake模型是由Kass竽人首次提出的算法,广泛地W用于计算机视觉及图像处理屮的各个领域,如边缘检测、图像分割、运动跟踪等,持别应用于图像中感兴趣目标轮廓的提取。
Snake模型引入高层知识,在处理局部间断的边缘时,提取效果比传统轮廓提取方法要好。
1 Snake模型的基本思想Snake模型乂称为主动轮廓线模型(active eontoiir model),其星本思想是依据图像信息进行曲线(曲面)演化,使其最终找到目标物体的边界。
这种方法将分割问题转化为最优化问题,利用闭合曲线(或曲而)形变的特定规彳匚定义度量闭合曲线(曲而)形变的能呈函数,通过最小化能呈换数使曲线(曲而)逐渐逼近图像中目标物体的边缘CSnake模型能量函数的设计原则是:有利属性要能导致能量缩小。
有利属性包括曲线(曲而)连续、平滑、与高梯度区域的接近以及其他一些具体的先验知识。
这样,活劝轮廓在取值范围内移动时,就能在能量函数的指导下收敛到局部边界,而且能保持曲线(曲而)的连续和平滑-Snake模型是在曲线(曲面)本身的内力和图像数据的外部约束力作用下的移动的变形轮廓。
作用在Snake模型上的力依据轮廓所在的位置及其形状决定如何在空间局部的变化。
内力和外力的作用是不同的: 内力起平滑约束作用,外力则引导Snake模型向图像特征移动。
2基于Snake模型的轮廓提取方法对于传统的轮廓提取方法,首先要进行基本的边缘检测,然后进行边缘连接、一值化Z后,继而进行轮廓跟踪处理。
在边缘检测时,易受局部噪声影响而产生虚假边缘,或考是不连续的间断边缘,无法保证分割或者提取的结果就是连续光滑的闭合轮廓;此外,基于底层信息的轮廓跟踪,一方而对一•值化过程的依赖性比较人;另一方而,对于间断的边缘,使用上述简单方法将会跟踪失败。
这些都是传统计算机视觉屮分层处理模型所无法解决的问题。
Snake模型为解决轮廓提取任务提供了新的思维方法。
相机抓取轮廓的逻辑
相机抓取轮廓的逻辑一、引言轮廓检测是计算机视觉中的一个基本问题,其在目标跟踪、场景理解、机器视觉等领域有着广泛的应用。
相机抓取轮廓,即使用相机捕捉并识别图像中的轮廓信息,涉及到的技术和方法有很多。
本文将深入探讨相机抓取轮廓的逻辑,从基本原理到实现方法,再到优化策略进行全面阐述。
二、相机抓取轮廓的基本原理相机抓取轮廓的基本原理基于图像处理和计算机视觉技术。
首先,需要了解的是,轮廓是物体边缘的描绘,是物体形状信息的重要载体。
在数字图像中,轮廓通常表现为像素集合的边缘。
因此,抓取轮廓的过程可以理解为在图像中识别和提取边缘的过程。
边缘检测是实现这一目标的关键步骤。
边缘检测算法会分析图像的像素强度变化,以确定哪些像素点位于物体的边缘。
常见的边缘检测算法包括Sobel、Canny、Prewitt等。
这些算法通过计算像素点邻域的强度差异来确定边缘像素。
三、相机抓取轮廓的实现方法1.图像预处理:在抓取轮廓之前,需要对图像进行一系列预处理操作,包括灰度化、噪声去除、对比度增强等。
这些操作可以提高图像的清晰度,降低背景噪声对轮廓检测的影响。
2.边缘检测:通过使用合适的边缘检测算法,如Sobel、Canny等,可以识别出图像中的边缘像素。
这些像素构成了物体的轮廓。
3.轮廓提取:一旦边缘像素被识别出来,就可以通过一系列形态学操作(如膨胀、腐蚀等)来提取完整的轮廓。
这些操作有助于连接断裂的边缘像素,恢复物体原始的轮廓形状。
4.轮廓跟踪与描绘:为了获得稳定且准确的轮廓信息,还需要进行轮廓跟踪。
这通常涉及到动态规划、光流法等技术,用于在连续帧之间跟踪同一物体的轮廓变化。
最后,通过描绘函数将跟踪得到的轮廓信息展示在图像上。
四、优化相机抓取轮廓的策略为了提高相机抓取轮廓的准确性和效率,可以采用以下优化策略:1.自适应阈值:在边缘检测过程中,可以采用自适应阈值方法,根据图像局部区域的像素强度分布来动态调整阈值。
这种方法可以更好地适应不同光照条件下的图像,提高边缘检测的准确性。
边缘检测的原理
边缘检测的原理
边缘检测是一种图像处理技术,它的原理是通过分析和识别图像中颜色、灰度或纹理的突变部分,提取出图像中物体轮廓的技术。
边缘检测的基本原理是基于图像的梯度变化。
在一幅图像中,物体的边缘往往表现为像素灰度值的变化。
利用这种像素灰度值的变化可以找到图像中的边缘。
常用的边缘检测算法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是一种基于图像灰度梯度的边缘检测算法。
它将图像中每个像素的灰度值与其周围像素的灰度值进行卷积运算,得到图像的梯度值。
通过设置阈值来提取出图像中的边缘。
Prewitt算子是一种类似于Sobel算子的边缘检测算法。
它也是通过对图像中的每个像素进行卷积运算来计算梯度值,然后通过设定阈值来提取边缘。
Canny算子是一种比较高级的边缘检测算法,它结合了图像梯度和非极大值抑制技术。
对图像中每个像素进行梯度计算,并在梯度最大值处绘制边缘。
然后利用阈值来筛选出符合条件的边缘。
边缘检测在计算机视觉、图像处理等领域都有广泛的应用。
通
过边缘检测,可以提取图像中的特征信息,例如物体的轮廓、边界等,从而实现目标检测、图像分割、图像修复等任务。
图像分割之Snake模型PPT课件

研究总
这些点首尾以景直线相连构成轮廓案线,其中x(s)和果y(s)分别表示每个结控
制点在图像中的坐标位置。
s 是以傅立叶变换形式描述边界的自变量。
7
• Snake Model (蛇模型)
在Snakes的控制点上定义能量函数(反映能量与轮廓之间的关系):
研究方
研究成
研究总
其中第1项称为弹性能量是v的案一阶导数的模,第果2项称为弯曲能量结,
3
• Basics (基础知识)
简单曲线在曲率力的驱动下演化所具有的一种非 常特殊的数学性质是:
一切简单曲线研,究无背论被扭曲得多研么究严方重,只要还 研究成 是一种简单曲线景,那么在曲率力的案推动下最终将 果
退化成一个圆,然后消逝(可以想象下,圆的所 有点的曲率力都向着圆心,所以它将慢慢缩小, 以致最后消逝)。
以最小化能量目标函数为目标,控制参数曲线变形,具有最小能量的闭
合曲线就是目标轮廓。
2
• Basics (基础知识)
曲线演化理论: 曲线可以简单地分为以下几种
研究背 景
研究方 案
研究成 果
研究总 结
曲线存在曲率。 在法向曲率力(曲线的二次导数)的推动下,曲线的运动方向有不同。 图中蓝色箭头处的曲率为负,而绿色箭头处的曲率为正。
局部特研征究吻合背的情况。研究方
研究成
研究总
景
案
果
结
内部能量仅仅跟snake的形状有关,而跟图像数据无关。
外部能量仅仅跟图像数据有关。
在某一点的α和β的值决定曲线可以在这一点伸展和弯曲的程度。
9
结束语
当你尽了自己的最大努力时,失败也是伟大的, 所以不要放弃,坚持就是正确的。
了解计算机视觉技术中的形状识别算法
了解计算机视觉技术中的形状识别算法计算机视觉是一门研究计算机和摄像机之间的交互,目标是让计算机能够通过摄像机来获取图像信息,并进行处理和理解。
形状识别算法是计算机视觉中一种重要的技术,它可以帮助计算机识别和理解图像中的各种形状。
形状识别算法的目标是根据输入的图像数据,找出其中的各种形状并进行分类。
形状识别算法可以用于许多实际应用中,比如工业检测、智能交通、医疗诊断等领域。
下面将介绍一些常见的形状识别算法。
首先,最简单的形状识别算法是基于图像的边缘检测。
边缘是图像中两个不同区域的交界处,通常是明显的灰度或颜色值变化。
图像中的边缘可以通过一些算法来识别,比如经典的Canny边缘检测算法。
该算法通过对图像进行平滑、计算梯度和非极大值抑制等步骤,能够准确地检测出图像中的边缘。
其次,还有一种常见的形状识别算法是基于图像轮廓的识别。
轮廓是图像中一个连续的边界,可以通过对图像进行边缘检测并进行形态学处理得到。
在得到轮廓后,可以通过计算轮廓的形状特征来进行分类。
比如,可以计算轮廓的长度、宽度、面积等特征,然后使用机器学习算法训练分类模型进行识别。
另外,还有一种常见的形状识别算法是基于特征描述子的。
特征描述子是一种用来描述图像中局部特征的向量,可以通过检测图像中的关键点,并对这些关键点进行描述来得到。
常见的特征描述子算法有SIFT、SURF和ORB等。
这些算法能够提取出图像中的关键点,并计算出关键点的特征向量,然后可以通过比较特征向量的相似度来进行形状匹配和识别。
此外,还有一些基于深度学习的形状识别算法也被广泛应用。
深度学习是一种通过训练大量数据和多层神经网络来学习特征和分类模型的方法。
在形状识别中,可以使用深度学习来学习形状的特征表示和分类模型。
比如,可以使用卷积神经网络(CNN)来提取图像的特征表示,然后通过全连接层进行形状分类。
在实际应用中,根据具体的任务需求可以选择不同的形状识别算法或者将它们结合起来使用。
基于Snake ̄Net_算法的刺绣针法识别

纹理更加清晰ꎬ为下一步的目标提取做好准备ꎮ
线的形式呈现ꎬ比较连续、光滑ꎬ具有良好的匹配效
2. 2 基于改进 Snake 算法的交互式目标分割
果和形状检测能力ꎮ 并且该算法是一种交互式目标
目标分割是将图像中的特征区域从复杂背景中
识别算法ꎬ通过智能人机交互在预选样本时加入经
的图 6( c) 、图 6( f) ꎬ都比处理前的图 6( b) 的边缘和
对图像中的不同针法区域进行目标分割ꎬ获得齐针、
的目标分割ꎮ
抢针和套针的目标样本ꎬ为下一步提取特征信息做
传统的 Snake 算法中ꎬ控制点是人为选择的ꎬ虽
然比较灵活ꎬ但受经验等主观因素的影响较大ꎬ而且
好准备ꎮ
本文研究的刺绣图像ꎬ其形状特征丰富ꎬ单一的
手动选点时ꎬ无法精确选取同一控制点ꎬ导致每次试
图像分割算法像阈值法、边缘检测法等ꎬ难以实现对
影响ꎬ会出现轮廓检测不完整或者过度检测等问题ꎮ
与已知针法模板进行特征匹配ꎬ识别针法类别ꎮ 但
因此本文将其用于初始轮廓的界定ꎬ结合活动轮廓
其研究处理的手绣样本形状相似ꎬ图像清晰度较高ꎬ
样本纹理特征可控ꎬ与网络中形态各异、噪声众多的
刺绣图像相比ꎬ方法适用性不足ꎬ并且该研究更着重
模型 Snake 算法 [12 ̄13] ꎬ互相优化ꎬ以获取更加圆顺、
针法和丝线是刺绣的主要构成因子ꎬ共同塑造
可分为点、线、面 3 类 [17] ꎬ本文结合针法的技术工艺
特点分析ꎬ将刺绣针法定义为点状针法ꎬ线条针法和
块面针法 3 类ꎬ分类图归结如图 1ꎮ
图 1 刺绣针法分类
Fig. 1 Classification of embroidery stitches
点状针法和线状针法主要表现为形成刺绣中的
边缘检测与图像轮廓提取算法研究

边缘检测与图像轮廓提取算法研究摘要:边缘检测与图像轮廓提取算法是计算机视觉领域的重要研究方向之一。
本文通过对边缘检测与图像轮廓提取算法的研究,总结了常用的边缘检测方法,并对其原理和应用进行了详细的介绍和分析。
本文还对不同方法进行了比较,并讨论了其优缺点及适用范围。
通过本文的研究,可以为计算机视觉领域的相关工作提供参考和借鉴。
1. 引言随着计算机视觉技术的不断发展,图像处理成为一个重要的研究方向。
在图像处理中,边缘检测与图像轮廓提取是一个基础而重要的任务。
它可以在数字图像中找到物体或场景之间的分界线或区域,并将其转化为数字化信息。
2. 边缘检测方法2.1 Roberts算子Roberts算子是一种基于差分运算符来进行边缘检测的方法。
它通过将一个2×2大小的模板应用于原始图像中相邻点之间来计算边缘强度。
Roberts算子简单易行,计算速度快,但对于噪声敏感。
2.2 Sobel算子Sobel算子是一种基于梯度运算符的边缘检测方法。
它通过将一个3×3大小的模板应用于原始图像中的每一个像素点来计算梯度强度。
Sobel算子对噪声有一定的抑制作用,但对边缘方向有一定的模糊性。
2.3 Canny边缘检测Canny边缘检测是一种基于多步骤操作来进行边缘检测的方法。
它首先进行高斯滤波以抑制噪声,然后通过计算梯度幅值和方向来确定像素点是否为边缘点,最后使用非极大值抑制和双阈值处理来提取最终的图像轮廓。
3. 图像轮廓提取方法3.1 链码法链码法是一种基于连续性原则进行图像轮廓提取的方法。
它通过将轮廓线转化为由连续码字序列组成的链码表示形式,并根据相邻点之间是否连续来确定链码中每个点之间的关系。
3.2 轮廓跟踪法轮廓跟踪法是一种基于像素跟踪的图像轮廓提取方法。
它通过从图像中的一个起始点开始,按照一定的规则沿着边缘进行像素跟踪,直到回到起始点为止。
轮廓跟踪法可以得到精确的轮廓线,但对于复杂图像处理较为困难。
活动轮廓模型之Snake模型简介
图像分割之(五)活动轮廓模型之Snake模型简介在“图像分割之(一)概述”中咱们简单了解了目前主流的图像分割法。
下面咱们主要学习下基于能量泛函的分割法。
这里学习下Snake模型简单的知识,Level Set(水平集)模型会在后面的博文中说到。
基于能量泛函的分割法:该类法主要指的是活动轮廓模型(active contour model)以及在其基础上发展出来的算法,其基本思想是使用连续曲线来表达目标边缘,并定义一个能量泛函使得其自变量包括边缘曲线,因此分割过程就转变为求解能量泛函的最小值的过程,一般可通过求解函数对应的欧拉(Euler.Lagrange)程来实现,能量达到最小时的曲线位置就是目标的轮廓所在。
主动轮廓线模型是一个自顶向下定位图像特征的机制,用户或其他自动处理过程通过事先在感兴趣目标附近放置一个初始轮廓线,在部能量(力)和外部能量(外力)的作用下变形外部能量吸引活动轮廓朝物体边缘运动,而部能量保持活动轮廓的光滑性和拓扑性,当能量达到最小时,活动轮廓收敛到所要检测的物体边缘。
一、曲线演化理论曲线演化理论在水平集中运用到,但我感觉在主动轮廓线模型的分割法中,这个知识是公用的,所以这里我们简单了解下。
曲线可以简单的分为几种:曲线存在曲率,曲率有正有负,于是在法向曲率力的推动下,曲线的运动向之间有所不同:有些部分朝外扩展,而有些部分则朝运动。
这种情形如下图所示。
图中蓝色箭头处的曲率为负,而绿色箭头处的曲率为正。
简单曲线在曲率力(也就是曲线的二次导数)的驱动下演化所具有的一种非常特殊的数学性质是:一切简单曲线,无论被扭曲得多么重,只要还是一种简单曲线,那么在曲率力的推动下最终将退化成一个圆,然后消逝(可以想象下,圆的所有点的曲率力都向着圆心,所以它将慢慢缩小,以致最后消逝)。
描述曲线几特征的两个重要参数是单位法矢和曲率,单位法矢描述曲线的向,曲率则表述曲线弯曲的程度。
曲线演化理论就是仅利用曲线的单位法矢和曲率等几参数来研究曲线随时间的变形。
获取区域外轮廓的算法

获取区域外轮廓的算法
获取区域外轮廓的算法有多种,以下是一些常用的算法:
1. 边界追踪算法(Boundary Tracing):该算法从图像中的某一点开始,按照一定的规则遍历相邻的像素点,并将遍历过的像素点标记为边界点。
通过遍历整个图像,最终可以得到区域的外轮廓。
2. 边缘检测算法(Edge Detection):常用的边缘检测算法有Sobel算子、Canny算子和Laplacian算子等。
这些算法可以通过计算图像中像素点的梯度值来检测出边缘,然后根据一定的阈值处理得到区域的外轮廓。
3. 轮廓分析算法(Contour Analysis):该算法首先通过阈值化或分割等方法将图像转化为二值图像,然后利用连通性分析来提取区域的轮廓。
常用的连通性分析算法有基于4邻域或8邻域的连通域标记算法,可以得到区域的外轮廓。
4. 分水岭算法(Watershed Algorithm):该算法基于图像中的灰度值和梯度信息,将图像看作地形图,通过模拟水流漫溢的过程来分割区域。
在分水岭算法中,区域的外轮廓可以通过提取分割结果中的边界得到。
这些算法可以根据具体的应用场景和需求选择使用。
需要注意的是,获取区域外轮廓的算法在处理复杂图像或存在噪声的情况下可能会有一定的误差,因此在实际应用中需要根据具体情况进行优化和调整。
基于目标检测结果的轮廓及颜色识别研究
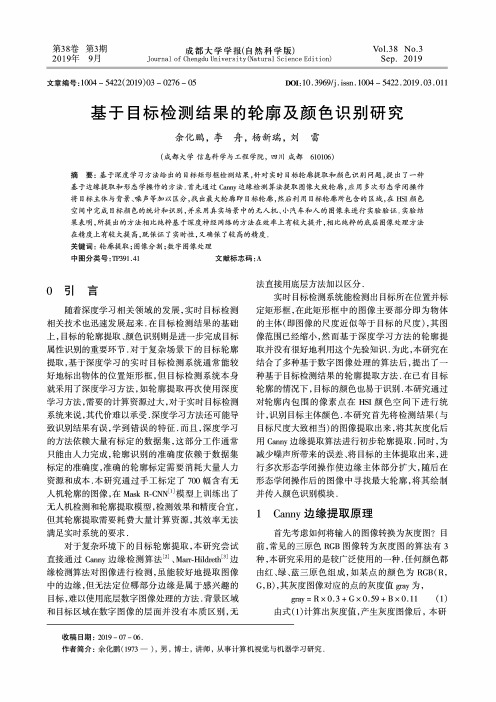
弟38卷弟3期 成都大学学报(自然科学版)Vol.38No.32019年9月Journal of Chengdu University(Natural Science Edition)Sep.2019文章编号:1004-5422(2019)03-0276-05DOI:10.3969/j.issn.1004-5422.2019.03.011基于目标检测结果的轮廓及颜色识别研究余化鹏,李舟,杨新瑞,刘雷(成都大学信息科学与工程学院,四川成都610106)摘要:基于深度学习方法给出的目标矩形框检测结果,针对实时目标轮廓提取和颜色识别问题,提出了一种基于边缘提取和形态学操作的方法.首先通过Canny边缘检测算法提取图像大致轮廓,应用多次形态学闭操作将目标主体与背景、噪声等加以区分,找出最大轮廓即目标轮廓,然后利用目标轮廓所包含的区域,在HSI颜色空间中完成目标颜色的统计和识别,并采用真实场景中的无人机、小汽车和人的图像来进行实验验证.实验结果表明,所提出的方法相比纯粹基于深度神经网络的方法在效率上有较大提升,相比纯粹的底层图像处理方法在精度上有较大提高,既保证了实时性,又确保了较高的精度.关键词:轮廓提取;图像分割;数字图像处理中图分类号:TP391.41文献标志码:A0引言随着深度学习相关领域的发展,实时目标检测相关技术也迅速发展起来.在目标检测结果的基础上,目标的轮廓提取、颜色识别则是进一步完成目标属性识别的重要环节.对于复杂场景下的目标轮廓提取,基于深度学习的实时目标检测系统通常能较好地标出物体的位置矩形框,但目标检测系统本身就采用了深度学习方法,如轮廓提取再次使用深度学习方法,需要的计算资源过大,对于实时目标检测系统来说,其代价难以承受.深度学习方法还可能导致识别结果有误,学到错误的特征.而且,深度学习的方法依赖大量有标定的数据集,这部分工作通常只能由人力完成,轮廓识别的准确度依赖于数据集标定的准确度,准确的轮廓标定需要消耗大量人力资源和成本.本研究通过手工标定了700幅含有无人机轮廓的图像,在Mask R-CNN⑴模型上训练出了无人机检测和轮廓提取模型,检测效果和精度合宜,但其轮廓提取需要耗费大量计算资源,其效率无法满足实时系统的要求.对于复杂环境下的目标轮廓提取,本研究尝试直接通过Canny边缘检测算法⑵、Marr-Hildreth⑶边缘检测算法对图像进行检测,虽能较好地提取图像中的边缘,但无法定位哪部分边缘是属于感兴趣的目标,难以使用底层数字图像处理的方法.背景区域和目标区域在数字图像的层面并没有本质区别,无法直接用底层方法加以区分.实时目标检测系统能检测出目标所在位置并标定矩形框,在此矩形框中的图像主要部分即为物体的主体(即图像的尺度近似等于目标的尺度),其图像范围已经缩小,然而基于深度学习方法的轮廓提取并没有很好地利用这个先验知识.为此,本研究在结合了多种基于数字图像处理的算法后,提出了一种基于目标检测结果的轮廓提取方法.在已有目标轮廓的情况下,目标的颜色也易于识别.本研究通过对轮廓内包围的像素点在HSI颜色空间下进行统计,识别目标主体颜色.本研究首先将检测结果(与目标尺度大致相当)的图像提取出来,将其灰度化后用Canny边缘提取算法进行初步轮廓提取.同时,为减少噪声所带来的误差、将目标的主体提取出来,进行多次形态学闭操作使边缘主体部分扩大,随后在形态学闭操作后的图像中寻找最大轮廓,将其绘制并传入颜色识别模块.1Canny边缘提取原理首先考虑如何将输入的图像转换为灰度图?目前,常见的三原色RGB图像转为灰度图的算法有3种,本研究采用的是较广泛使用的一种.任何颜色都由红、绿、蓝三原色组成,如某点的颜色为RGB(R, G,B),其灰度图像对应的点的灰度值gray为,gray=Rx0.3+Gx0.59+Bx0.11(1)由式(1)计算出灰度值,产生灰度图像后,本研收稿日期:2019-07-06.作者简介:余化鹏(1973-),男,博士,讲师,从事计算机视觉与机器学习研究.第3期余化鹏,等:基于目标检测结果的轮廓及颜色识别研究・277・究通过Canny边缘检测算法来初步提取图像的轮廓.Canny边缘检测算法基于3个基本原则:同时考虑查准率与召回率,尽可能找到所有真实的边缘,同时应该尽量降低伪响应;边缘点的定位误差应该低,真实边缘中心与检测器标记为边缘的点之间的距离应该最小;仅检测出单一边缘点,对于一个真实边缘点,检测器应仅检测并返回一个点,而在只有一个单一边缘点的位置,检测器不应返回多个边缘点.Canny边缘检测算法在数学层面表达了此3个基本原则,具体如下:1)令/(%』)表示输入图像,G(%,y)表示高斯函数,22G(%,y)二厂步(2)用G和/的卷积形成一幅平滑后的图像,/;(%』)=G(x,y)®f(x,y)(3)上述过程采用高斯滤波器将输入图像平滑.随后,计算出该点的梯度幅值和方向,M(%,y)二/g:+g:(4)和a(x=arctan[—](5)Sx式中住=8%'劭=8y•2)通过计算出的梯度方向矩阵a(^,y)对梯度幅值矩阵,y)进行非极大值抑制.首先将梯度方向离散化为4个方向,即上下、左右、正斜与反斜,以便对应3x3邻域.在梯度幅值矩阵,y)中以点G J)为中心的3x3邻域内沿梯度方向J)进行比对,若点(心)处的梯度幅值大于梯度方向a(Z,j)上与其相邻的2个点,则认为点(7J)是边缘点,保持其梯度幅值不变,反之则认为它是非边缘点,将其梯度幅值设置为0.3)用双阈值处理和连接分析来检测并连接边缘.首先选取高阈值T h和低阈值仇,随后遍历整个图像.若某点(心)的梯度幅值低于仇,则此点为非边缘点;若某点(的梯度幅值高于乙,则此点为强边缘点;若某点GJ)的梯度幅值低于乙且高于仇,则此点为弱边缘点.对于弱边缘点,对其8邻域像素进行判断,若其邻域内存在边缘点,则将该弱边缘点视为边缘点,反之则视为非边缘点.最后,输出最终的边缘图像.需注意的是,应用Canny边缘检测算法时,女口双阈值设置过高,会导致本属于目标主体的轮廓未被检测出;如双阈值设置过低,会导致噪声和背景产生的干扰轮廓过多,难以与属于目标主体的轮廓相区分.故本研究在应用Canny边缘检测算法时高低阈值比选取为2:1,充分考虑了上述两方面问题,取得了较好的平衡.2形态学闭操作与寻找最大轮廓在上述得到的图像中,本研究已经初步地通过Canny算法提取了图像中的轮廓.因目标尺度与图像大小大致相当,本研究设想提取其中的最大轮廓即为目标的轮廓.但在大多数情况下(即有少量背景干扰),上述操作提取到的轮廓实际上是由多个线段组成的不连通的轮廓,这些线段标出的轮廓有些属于目标轮廓的一部分,另一些则属于背景和噪声.在数字图像的层面上,无法较好地将背景、噪声和目标主体区分开来,如果直接在此图像寻找最大轮廓,提取到的轮廓通常仅表示目标主体的一部分,误差较大.如何连接属于目标主体的多个轮廓,同时又排除背景与噪声产生的轮廓,是本研究考虑的重点.由目标主体组成的轮廓线段位置相近,背景轮廓又通常位于图像边缘并且离目标主体较远,这是一个很好的先验信息,因此本研究通过多次形态学闭操作[4",将这些互不相连的属于目标主体的轮廓线段相连接,同时通过控制结构元大小,如此的操作并不会将背景和噪声产生的轮廓与目标轮廓相连.闭操作会平滑轮廓的一部分,弥合较窄的间断和细长的沟壑,消除小的孔洞,填补轮廓线中的断裂⑻.用结构元B对集合4的闭操作,可表示为4。
find_scaled_shape_model原理
find_scaled_shape_model原理find_scaled_shape_model原理find_scaled_shape_model是一种用于物体识别和跟踪的计算机视觉算法。
这个算法基于形状模型(Shape Model)进行目标的匹配和检测。
下面将介绍find_scaled_shape_model的原理。
1. 形状模型构建:首先,我们需要构建一个形状模型来表示目标物体的形状。
这可以通过收集一系列标记目标的训练样本来实现。
对于每个样本,我们提取出目标物体的关键点(landmark points)或者边界点(boundary points)。
通过对这些点进行形状约束和变换,就可以构建目标物体的形状模型。
2. 形状匹配:当需要检测目标物体时,我们将待检测图像与形状模型进行匹配。
首先,我们要对输入图像进行预处理,如图像增强、缩放等。
然后,在不同尺度范围内应用形状模型,并在每个尺度上对目标进行检测。
这可以通过调整形状模型的大小来实现,在不同尺度上检测目标。
3. 形状匹配度量:在每个尺度上,我们需要定义一个度量来评估形状模型与输入图像中的候选目标的匹配程度。
常用的度量方法是将形状模型的关键点与候选目标的关键点进行对应,并计算两组关键点之间的距离。
可以使用欧氏距离、形变能量函数等度量方法来评估匹配度。
4. 尺度选择和确认:在不同尺度上进行形状匹配后,我们需要选择最有可能的尺度,并确认检测结果。
通常,我们会选择匹配度最高的尺度,并进行进一步的验证。
例如,可以对匹配结果进行形状变换或者使用附加信息(如颜色、纹理等)来进一步确认目标的存在。
通过以上原理,find_scaled_shape_model可以高效地进行物体的检测和跟踪。
它基于形状模型,利用尺度变换和形状匹配度量方法来搜索并确认目标物体的存在。
这个算法可以在各种应用场景中使用,如目标跟踪、人脸识别、手势识别等。
轮廓检测算法

轮廓检测算法引言轮廓检测是计算机视觉领域中的一项重要技术,它可以用于图像分割、目标识别和形状分析等应用。
本文将介绍轮廓检测算法的原理和常见实现方法,并探讨其在实际应用中的一些局限性和改进方法。
一、轮廓检测的原理轮廓是图像中物体边界的表示,它可以用于描述物体的形状和结构。
轮廓检测算法的目标是从图像中提取出物体的轮廓信息。
常见的轮廓检测算法基于边缘检测和连通区域分析的思想。
边缘检测是指从图像中检测出物体边界的过程。
常用的边缘检测算法有Sobel算子、Prewitt算子和Canny算子等。
这些算子通过计算图像中像素值的变化梯度来确定边缘的位置。
然后,通过连接相邻的边缘点,可以得到物体的大致轮廓。
连通区域分析是指将相邻且具有相似特征的像素点划分为一组的过程。
在轮廓检测中,连通区域分析可以用于精化轮廓的边界。
常见的连通区域分析算法有基于种子点的连通区域分析和基于区域的连通区域分析等。
这些算法通过对像素点进行标记和分类,可以得到物体的精确轮廓。
二、常见的轮廓检测算法1. 霍夫变换霍夫变换是一种常用的轮廓检测算法,它可以检测出图像中的直线、圆和椭圆等特定形状。
霍夫变换的基本思想是将图像空间中的点映射到参数空间中,然后通过统计参数空间中的峰值来确定物体的轮廓。
2. 形态学轮廓检测形态学轮廓检测是一种基于形态学运算的轮廓检测算法,它可以检测出图像中的凸壳和凹壳等特定形状。
形态学轮廓检测的基本思想是通过对图像进行膨胀和腐蚀等形态学运算,来提取出物体的轮廓。
3. 基于边缘追踪的轮廓检测基于边缘追踪的轮廓检测是一种基于边缘检测的轮廓检测算法,它可以检测出图像中的任意形状。
基于边缘追踪的轮廓检测的基本思想是从图像中选取一个起始点,然后按照一定规则追踪边缘的路径,直到回到起始点为止。
三、轮廓检测算法的局限性和改进方法轮廓检测算法在实际应用中存在一些局限性。
首先,由于图像中存在噪声和光照变化等因素,轮廓检测结果可能不准确。
其次,轮廓检测算法对物体的形状和结构有一定的要求,不适用于复杂的场景。
基于主动轮廓模型的SAR图像中的目标边缘检测
基于主动轮廓模型的SAR图像中的目标边缘检测焦旭;孙自强;王亮【期刊名称】《电脑知识与技术》【年(卷),期】2014(000)023【摘要】This paper studies the objective of SAR image segmentation and detection methods based on Snake Model. Aimed at the weakness that Snake model can not converge concavity district correctly, an improved Snake model is proposed by adding the external constraint energy. In algorithm realization, the greedy algorithm is taken in. It can effectively utilize local information and global information of the image, accurately located boundary and maintain linear smooth. Experiment results indicate that the im-proved Snake model can be better converged into the concavity district of image.%该文基于Snake模型研究了SAR图像的目标分割与检测方法。
首先针对Snake模型图像分割技术中存在的凹陷区域不能很好收敛的缺点,在前人研究成果的基础上,增加了外部约束凹陷能量,提出了改进的Snake模型,然后采用贪婪算法进行方法的实现,该方法能够有效地利用局部与整体信息,实现目标边界准确定位,保持线性光滑。
基于轮廓特征的目标识别研究

基于轮廓特征的目标识别研究基于轮廓特征的目标识别研究摘要:目标识别是计算机视觉领域的重要研究方向之一。
本文基于轮廓特征展开了一项关于目标识别的研究。
首先介绍了目标识别的背景和意义,随后详细探讨了轮廓特征的定义和提取方法,并结合实例进行了说明。
接着,介绍了常用的目标识别算法,并重点分析了基于轮廓特征的目标识别方法。
最后,通过实验验证了该方法的有效性,并对未来的研究方向进行了展望。
1. 引言目标识别是图像处理和计算机视觉领域的重要研究方向之一。
其在自动驾驶、机器人导航、工业自动化等领域具有广泛的应用前景。
目标识别的关键是从图像中提取出目标的特征信息并进行准确的分类和识别。
2. 轮廓特征的定义与提取方法轮廓特征是目标的外形轮廓在图像中的表现形式。
轮廓特征有助于描述目标的形状和边界信息。
2.1 轮廓特征的定义轮廓特征可以简单地定义为目标的外形边界线。
通过提取轮廓特征,可以获得目标的概貌信息,具有一定的鲁棒性和重复性。
2.2 轮廓特征的提取方法轮廓特征的提取方法多种多样,主要包括基于边缘检测的方法、基于边缘连接的方法和基于区域分割的方法。
2.2.1 基于边缘检测的方法边缘检测是目标识别中常用的方法之一,可以通过检测图像中目标与背景的边界来提取轮廓特征。
常用的边缘检测方法包括Sobel、Canny和Laplacian等。
2.2.2 基于边缘连接的方法边缘连接是在边缘检测的基础上,通过连接边缘点来提取目标的轮廓特征。
常用的边缘连接方法包括霍夫变换和最小生成树等。
2.2.3 基于区域分割的方法区域分割方法将图像分成若干个连通的区域,并通过分析区域的边界来提取轮廓特征。
常用的区域分割方法包括基于阈值分割的方法和基于边缘生长的方法等。
3. 基于轮廓特征的目标识别方法基于轮廓特征的目标识别方法是在提取轮廓特征的基础上,通过对比目标的形状和边界信息来进行分类和识别。
3.1 特征匹配方法特征匹配方法通过计算不同图像间的轮廓特征差异来进行目标的匹配。
边缘检测和轮廓提取

目录摘要 (2)Abstract (3)1概述 (4)1.1数字图像处理的意义 (4)1.2MATLAB简介 (4)1.3设计任务 (5)2边缘检测 (6)2.1图像的边缘 (6)2.2边缘检测的基本步骤 (6)2.3边缘检测算法 (7)2.3.1Reborts算子 (7)2.3.2Sobel算子 (8)2.3.3Prewitt 算子 (8)2.3.4Kirsch 算子 (9)2.3.5LOG算子 (10)2.3.6Canny算子 (11)3轮廓提取 (12)4实验仿真 (13)4.1 Sobel算子代码 (13)4.2轮廓提取算法 (15)4.3仿真结果及分析 (18)5实验小结 (19)6参考文献 (20)摘要图像边缘是图像最基本的特征之一,往往携带着一幅图像的大部分信息。
而边缘存在于图像的不规则结构和不平稳现象中,也即存在于信号的突变点处,这些点给出了图像轮廓的位置,这些轮廓常常是我们在图像边缘检测时所需要的非常重要的一些特征条件,这就需要我们对一幅图像检测并提取出它的边缘。
而边缘检测算法则是图像边缘检测问题中经典技术难题之一,它的解决对于我们进行高层次的特征描述、识别和理解等有着重大的影响;又由于边缘检测在许多方面都有着非常重要的使用价值,所以人们一直在致力于研究和解决如何构造出具有良好性质及好的效果的边缘检测算子的问题。
本此实验主要分析几种应用于数字图像处理中的边缘检测算子,根据它们在实践中的应用结果进行研究,主要包括:Robert 边缘算子、Prewitt 边缘算子、Sobel 边缘算子、Kirsch 边缘算子以及Laplacian 算子等对图像及噪声图像的边缘检测,根据实验处理结果讨论了几种检测方法的优劣.关键词:数字图像处理;边缘检测;算子AbstractThe edges of the image, one of the basic characteristics of the image tend to carry most of the information in the image. Edge exists in the irregular structure of the image and non-stationary phenomena, i.e. exist in a mutation point of the signal, these points are given the location of the image contours, these contours are often required in image edge detection is very important some of the characteristics of the condition, which we need to detect and extract its edge image. The edge detection algorithm is the classic one of the technical problems of image edge detection problems, the solution for our high-level characterization, recognition and understanding has a significant impact; edge detection are very important in many ways value in use, so people have been devoted to the study and solve the problem of how to construct edge detection operator with a good nature and good results.This experiment analysis of several used in digital image processing, edge detection operator research results according to their application in practice, including: The Robert Edge Operator child Prewitt edge operator, Sobel edge operator, Kirsch edge operator and Laplacian operator on the image and noise image edge detection discussed the pros and cons of several detection methods, according to the results of the experimental treatment.Keywords: digital image processing; edge detection; operator1概述1.1数字图像处理的意义数字图像处理技术的迅猛发展,其应用前景得到了不可限量的扩展,如今各行各业都在积极发展与图像相关的技术。
边缘检测的名词解释
边缘检测的名词解释边缘检测是计算机视觉领域中一项重要的图像处理技术,其目的是识别和提取图像中各个物体或场景的边缘信息。
边缘是指图像中颜色或亮度发生明显变化的地方,它标志着物体之间的分界线或者物体与背景之间的过渡区域。
边缘检测能够帮助我们理解图像中的结构,更好地分析图像内容并进行后续的图像处理和分析。
在计算机视觉应用中,边缘检测有着广泛的应用。
例如在目标识别中,边缘检测可以帮助我们找到物体的轮廓,从而进行物体的识别和分类。
在图像分割方面,边缘检测可以用来分割图像中的不同区域,提取感兴趣的物体。
此外,边缘检测还可以用于图像增强、图像压缩等领域。
常用的边缘检测算法包括Sobel算子、Laplacian算子、Canny算子等。
这些算法基于图像的灰度值和亮度变化来检测边缘。
Sobel算子通过计算图像中每个像素点的梯度幅值来确定边缘的位置和方向。
Laplacian算子则通过计算像素值的二阶导数来检测边缘。
而Canny算子则是一种综合性的边缘检测算法,它综合了Sobel 算子和Laplacian算子的优点,在性能上更加稳定和准确。
边缘检测并不是一项简单的任务,它受到噪声、光照变化、图像分辨率等因素的影响。
因此,在进行边缘检测前,通常需要进行预处理,比如图像平滑、灰度化等步骤,以减少这些干扰因素对边缘检测结果的影响。
边缘检测并非完美,它仍然存在一些问题和挑战。
例如,边缘检测往往会产生一些不连续和不完整的边缘,这需要通过进一步的处理和分析来解决。
此外,在图像中存在复杂的背景和纹理时,边缘检测的准确性也会受到影响。
因此,为了获得更好的边缘检测效果,我们需要结合其他的图像处理和分析技术,如图像分割、特征提取等。
总结起来,边缘检测是计算机视觉中一项重要的图像处理技术,其通过识别和提取图像中的边缘信息来帮助我们理解图像结构、进行目标识别和图像分割等应用。
虽然边缘检测还存在一些问题和挑战,但随着技术的不断进步和研究的不断深入,相信边缘检测在图像处理领域将发挥更大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(10)
以其作为边界强度。
△
为了提高运算速度,可以将 G 的二维卷积模板分解为两
个一维卷积模板:
2
鄣G 鄣x
=kxexp(- x 2 )≈h1(x)h2(y) 2σ
(11)
2
鄣G 鄣y
=kyexp(- x 2 )≈h1(y)h2(x) 2σ
(12)
式中,k 为常数
2
h1(u)= 姨 k
uexp(-
u) 2
Abstract:A method based on combining active contour with passive edge detection to extract contour is proposed.This method avoids the shortcomings which exist in active and passive techniques,and combines their advantages.To get a better contour,three techniques are used successively,first Canny detector,then segmentation based on probability,and finally snake model. Key words:Snake model;active contour;Canny detector;probability;image segmentation
2 传统的 Snake 模型的介绍
Snake 模型是 1987 年在 Michael Kass[1]的论文中首次提出, 这篇论文的提出是对经典的轮廓提取方法的一次革新。在 Rafael C.Gonzalez 的 Digital Image Processing[2]里提到很多轮 廓提取的方法都是由图像自身的信息得到的,往往都是被动的
梯度值的近似,这里由 Sobel、Prwitt 模板的思想得到启发,设计
了一个交互式的产生高斯函数模板的函数,可以动态的产生
3×3、5×5、7×7 的模板,还可以改变 σ 的值达到预期的效果。
高斯函数的分离性质很容易表示成:
2
2
m-1 -k n-1 -l
2
2
Σ Σ G(x,y)×(f x,y)= e 2σ { e 2σ (f i-k,j-l)}
对于主动轮廓提取,计算量是巨大的,对于五点差分的迭
3
代方法,时间复杂度达到 O(nm ),n 为初始轮廓点的数目,随
着计算次数的增加,有时还要根据需要采用近邻、双线性、立方
卷积等插值法对部分轮廓线进行插值计算,所以有必要选择一
种较好的二值图像的提取方法,首先减少图像本身的信息量,
并且还不能失去所需要的信息。提出一种用概率的思想提取二
2
2
Ein(t v(s))=(α(s) v(s s) +β(s) vs(s s) )
α(s)表示应力参数,β(s)表示刚性参数。
(1) (2)
内部势能起到限制曲使之平滑的作用,外部势能是推动
Snake 模型向图像最显著的特征位置靠近,从而可以贴合图像
的边缘。为了满足最小化的要求,Snake 模型的基本方程必须
摘 要:基于主动轮廓识别和被动轮廓识别方法各自的优缺点,提出结合主动和被动的方法,先对图像进行被动轮廓的预处理,然 后再应用主动轮廓的方法,通过比较选出 Canny 算子进行预处理,再通过基于概率的方法分割图像,最后再应用 Snake 模型进行 轮廓提取。并取得较好的应用。 关键词:Snake 模型;主动轮廓线;Canny 算子;概率;图像分割 DOI:10.3778/j.issn.1002-8331.2009.26.047 文章编号:1002-8331(2009)26-0160-03 文献标识码:A 中图分类号:TP391
(1)该点的边界强度大于沿该点的梯度方向上的两个相邻
的像素的边界强度。
(2)与该点梯度方向上的相邻两点的梯度方向之差都小
于 45°。
(3)以该点为中心的 3×3 子域中的边界强度极大值小于某
个阈值。
3.2 高斯模板的产生
在实际应用中,并不是直接用图像密度 (I x,y)最为图像梯
度值的近似,而是用二维高斯函数和图像密度的卷积运算作为
ZHANG Yi,SUN Hu -yuan,SUN Li -juan,et bination of active contour with passive edge detection in contour puter Engineering and Applications,2009,45(26):160-162.
160 2009,45(26)
Computer Engineering and Applications 计算机工程与应用
边缘检测和 Snake Model 结合的轮廓识别
张 毅 1,孙虎元 2,孙立娟 2,孙晓光 1 ZHANG Yi1,SUN Hu-yuan2,SUN Li-juan2,SUN Xiao-guang1
(16)
A-1
m-1
Σ Σ S0 产生的概率 φ0 = pi =φ(A),S1 产生的概率 φ1 = pi =
i=0
i=A
Σ Σ A-1
1-φ0 ,S0 的平均值 η0 =
i=0
ipi φ0
=
φη((AA)),S1 的平均值
m-1
η1 =
i=A
ipi = φ1
162 2009,45(26)
Computer Engineering and Applications 计算机工程与应用
k=0
l=0
(15)
22
c=
1
2
2πσ
,
G(x,y)=e-(x2σ+y2 ),选择适当的 c
2
σ 值,就可以在窗口上
评价该值,以便获取该模板,根据式(15)计算出模板的右下角
元素,再根据高斯模板的中心左右对称性对应的赋值给其他三
个区如图 1。
图 1 7×7,σ=1 时的 Gauss 模板
3.3 基于概率的图像分割
提取方法,以及各种边缘检测的方法,由于受到噪声的影响比
较大,往往不能得到实际应用。Kass 提出利用能量最小化的方
法,利用迭代的思想,自动逐步封闭曲线形状以逼近图像中令
人感兴趣的目标图像轮廓,即 v(s)=(x(s),y(s))。这种方法需
要对图像进行预处理和建立能量函数的数学模型。Kass 并没
有提出如何得到图像初始轮廓线的具体方法,他只是说可以采
鄣Eext 鄣yi
,利用矩阵的思想,式(5)可以表示成:
-1
xt =(A+γI)(xt-1 -fx(xt-1 ,yt-1))
(6)
-1
yt =(A+γI)(yt-1 -fy(xt-1 ,yt-1))
(7)
Kass 提出的模型缺点是明显的,由于是用五点差分的方
法迭代产生下一个轮廓线的点,所以很难保证其全局收敛的特
满足 Euler 方程[3],假设 Snake 模型的最优化解为 Fv 。根据 Eu-
ler 方程可以表示为:
基金项目:国家自然科学基金(the National Natural Science Foundation of China under Grant No.40776044);上海市自然科学基金(the Natural Science Foundation of Shanghai City of China under Grant No.08ZR1404600)。
2σ
(13)
2
h2(u)= 姨 k
exp(-
u) 2
2σ
(14)
由于在寻求边缘点的时候,Canny 算子本质上也是根据该
点与其相邻点的灰度差别而决定其输出值,因此经过 Canny 算
子处理后,还要利用处理点的邻点的边缘信息以增加或减少该
点为边缘点的置信度。Canny 提出,满足以下准则的点可以确
定为边界点[7]:
值图像的动态的方法。选择一种全局最优的阈值,对图像二值
化处理,在后面的实验中也取得了较好的结果。
设一幅图像的灰度值为 0~m-1 级,灰度值 i 的像素数为 ni ,
Σm-1
此时得到的像素总数:N=
i=0
ni ,各值的概率为
pi
=
ni N
,然后用
A 将其分成两组
S0 ={0~A-1},S1 ={A~m-1} 各组产生的概率如下:
3.1 Canny 算子的介绍
常用的边缘检测的方法有,Sobel 算子、Prewitt 算子,利用
Canny 边界检测算子[7]进行预处理,对于二维图像,Canny 算子
能产生边界梯度方向和强度两个信息[8]。Canny 算子实际上是
用若干方向的模板分别对图像进行卷积运算,再取最可能的方
向。设图像 (f x,y),二维高斯函数:
2 2 2 2
G(x,y)=
1
2
2πσ
exp
-x
+y
2
2σ
(8)
由卷积求导的性质可知,G(x,y)*(f x,y)的梯度为:
△
△
[G(x,y)*(f x,y)]= G(x,y)*(f x,y)