基于ARM32位单片机的机器人设计毕业论文
基于ARM的智能家居机器人设计
基于ARM的智能家居机器人设计作者:魏桐韩剑辉蒋蒋薇来源:《科技创新与应用》2015年第13期摘要:文章设计了以STM32为微处理器的智能家居互动机器人,该设计以语音识别技术、语音合成技术、传感器技术、无线数据传输技术等为基础,完成了摄像头数据采集,数据传输,控制台与各控制终端通信,电机控制,实现了语音人机交互、机器人动作控制、室内环境监测、家用电器控制。
完成了智能家居以及机器人互动等功能,并且在现阶段,智能家居机器人在市面上较少,有广泛的应用前景。
关键词:智能家居;机器人;STM32引言随着计算机科学技术与电子技术的高速发展以及生活水平的提高,智能家居渐渐走进千家万户,智能灯,扫地机器人,智能电视等等以家居环境为平台,融合了通信,网络,计算机,自动控制等技术的产品层出不穷,在影视作品《超能陆战队》中,大白的形象让无数人魂牵梦萦,其实它的本质就是一个智能的机器人。
本设计以ARM Cortex-M3架构的STM32系列芯片为控制核心,以语音识别、合成技术,2.4Ghz通信技术,自动控制技术为基础,用蓝牙、NRF24L01等将各部分串联在一起,形成以机器人为中心的智能家居控制网络,用户可以与机器人进行对话或者发出指令,机器人会对发出的指令进行解析,并产生反馈,例如:控制家用电器,播放音乐等,除此之外,用户可以远程观看本地实时上传的室内图片,可以查看室内的环境状况,例如温湿度,空气情况等,可以控制机器人在室内行走,当用户不在室内时,如果有陌生人进入室内,机器人会进行警报,通知用户。
1 硬件组成1.1 机器人主体建立智能家居机器人系统关键是要稳定可靠,带负载能力很注意,电源部分、驱动部分是关键,采用航模电池锂电30C 5200MA 11.1v和10A双路大功率H桥电机驱动模块,具有强劲刹车功能。
为了保证机器人的稳定性,底盘采用小型坦克连履带模型,该模型结构稳定,载重能力强,可以稳定住底盘上的其他传感器以及模块。
基于单片机的智能防疫消杀机器人的设计

基于单片机的智能防疫消杀机器人的设计一、本文概述随着全球范围内新冠疫情的爆发和持续,防疫消杀工作成为了抗击疫情的重要手段。
传统的消杀方式,如人工喷洒消毒液,存在效率低下、安全性难以保障、人力资源浪费等问题。
为了解决这些问题,本文提出了一种基于单片机的智能防疫消杀机器人的设计方案。
该方案结合了单片机技术、传感器技术、自动控制技术和消毒技术,旨在实现自主导航、智能感知、精准消杀等功能,以提高防疫消杀工作的效率和安全性。
本文将详细介绍该智能防疫消杀机器人的硬件组成、软件设计、控制策略和实现方法。
我们将分析机器人的整体架构和核心硬件部件,包括单片机选型、传感器配置、消毒装置等。
我们将探讨机器人的软件设计思路,包括程序框架、算法选择、控制逻辑等。
接着,我们将详细介绍机器人的控制策略,如何实现自主导航、环境感知、目标识别、路径规划等功能。
我们将通过实验验证机器人的性能和稳定性,并讨论该方案在实际防疫消杀工作中的应用前景和潜在价值。
本文旨在提供一种基于单片机的智能防疫消杀机器人的设计方案,以期为疫情防控工作提供新的技术支撑和解决方案。
通过该方案的应用,可以大大提高防疫消杀工作的效率和安全性,降低人力资源的浪费和交叉感染的风险,为抗击疫情贡献一份力量。
二、智能防疫消杀机器人的需求分析消杀效率需求:消杀工作需要高效完成,特别是在公共场所和疫情严重区域。
智能防疫消杀机器人需具备快速、均匀的喷洒能力,以及覆盖面积广的特点,以确保在短时间内完成大面积的消杀工作。
自主导航与避障能力:机器人应具备良好的自主导航能力,能在不同的环境中进行路径规划,避开障碍物,实现无人监管下的自主工作。
这对于提高机器人的使用灵活性和适用范围至关重要。
智能识别与适应能力:智能防疫消杀机器人应能识别不同的环境和物体,根据环境特点调整消杀策略,如对不同材质的表面采用不同的消杀方式和强度,确保消杀效果的同时减少资源浪费。
远程控制与监控能力:机器人应支持远程操作,允许操作人员通过控制平台进行任务设定、路径规划、工作状态监控等,以提高操作的便捷性和安全性。
基于ARM32位单片机的机器人设计毕业设计

基于ARM32位单片机的机器人设计毕业设计目录摘要 (2)Abstract (3)第一章引言 (4)第二章 S3C44B0X控制器介绍 (6)2.1 S3C44B0X控制器管脚 (6)2.2 Samsung S3C44B0X介绍 (8)第三章 ARM开发工具简介 (12)3.1 ARM开发工具综述 (12)3.2 ARM STD安装和应用 (13)第四章 S3C44B0X内部资源编程 (20)4.1 LED显示 (20)4.2键盘控制 (23)4.3 数码管显示 (24)4.4 中断控制 (25)第五章机器人的设计 (27)5.1硬件结构 (27)5.2软件设计 (31)5.3结论 (44)第六章展望 (45)参考文献摘要ARMT7TDMI是通用的32位RISC微处理器成员之一,在非常低的功耗和价格下提供了很高性能。
Samsung S3C44B0X微处理器是三星公司专为手持设备和一般应用提供的高性价比和高性能的微处理器解决方案。
它使用ARM7TDMI核,工作在66MHZ。
为了降低系统总成本,该芯片集成了8KB Cache、外部存储器控制器、LCD控制器等,是一款高效的微处理器。
关键词:ARMT7TDMI 32位微处理器 Samsung S3C44B0X 66MHZAbstractThe ARM7TDMI is a member of the Advanced RISC Machines (ARM) family of general purpose 32-bit microprocessors, which offer very high performance for very low power consumption and price.SAMSUNG's S3C44B0X microprocessor is designed to provide a cost-effective and high performance micro-controller solution for hand-held devices and general applications. The S3C44B0X was developed using a ARM7TDMI core,up to 66MHZ。
基于stm32单片机的毕业设计
基于stm32单片机的毕业设计
一、引言
随着信息技术的发展,单片机应用越来越广泛,从家用电器、汽车等各个领域都用到了单片机,单片机的种类也越来越多,主要有以ARM为核心的嵌入式单片机,其中STM32系列是当前市场上最流行的嵌入式单片机,它采用32位ARM Cortex M3/M4内核,具有高性能、低功耗、低成本特点,可用于移动设备、家庭自动化、物联网等领域。
本文采用STM32F407VET6单片机,设计一个实际的系统,通过研究和实验,熟悉单片机的多种应用。
二、设计思路
1、硬件设计
本系统的硬件设计主要包括以下几部分:
(1)选用STM32F407VET6单片机作为系统的核心控制部件,其它元器件的位置应当注意兼容单片机的IO口。
(2)依据总体设计方案,确定实际使用的电子元器件,并对元器件设计PCB图,采用立体封装进行布线安装。
(3)采用C语言编程,编写系统的软件部分,实现系统的实际功能。
- 1 -。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计1. 引言1.1 背景介绍扫地机器人是一种能够自动清扫地面垃圾和灰尘的智能机器人,可以帮助人们减轻日常清洁工作的负担。
随着科技的不断发展,扫地机器人越来越受到人们的关注和青睐,成为家庭清洁的新选择。
而基于STM32单机的扫地机器人设计则是利用STM32单片机作为控制核心,通过编程实现对扫地机器人的控制和运行。
STM32单片机是由意法半导体推出的一种嵌入式微控制器系列,具有高性能、低功耗、丰富的外设接口等特点,非常适合用于智能机器人的控制系统设计。
借助STM32单片机的强大功能和灵活性,设计出一款性能稳定、功能丰富的扫地机器人是完全可行的。
通过深入研究和设计,本文旨在探讨基于STM32单机的扫地机器人设计方案,从硬件设计、软件设计到系统集成,全面展示如何利用STM32单片机实现扫地机器人的智能化控制。
通过本文的研究,不仅可以为智能家居领域带来新的技术理念和解决方案,同时也可以提高人们生活质量和舒适度。
1.2 研究目的研究目的是为了通过基于STM32单机的扫地机器人设计,探索智能家居领域的发展趋势,提高家庭生活质量和便利性。
具体而言,本研究旨在利用STM32单片机的强大功能和稳定性,结合扫地机器人的设计要求,实现一个性能优越、智能化程度高、操作简便的扫地机器人。
通过该设计,可以在家庭环境中实现自动清扫功能,提高家庭生活质量,减轻家庭成员的家务负担。
研究过程中还将不断优化硬件设计和软件设计,探索系统集成的最佳方法,以提高产品的稳定性和可靠性,为智能家居领域的发展贡献力量。
通过本研究,希望能为未来智能家居设备的设计提供借鉴和参考,推动智能化生活的发展,满足人们对便利、舒适生活的需求。
1.3 研究意义研究意义是对于基于STM32单机的扫地机器人设计具有重要的意义。
随着人工智能和自动化技术的不断发展,扫地机器人作为智能家居的重要组成部分,具有广阔的市场前景和应用空间。
本研究通过基于STM32单机的设计方案,旨在提高扫地机器人的智能化水平和性能表现,为家庭、办公和商业场所的清洁工作提供更加高效和便捷的解决方案。
基于STM32单片机的智能搬运机器人设计

设计制作数码世界 P .102基于STM32 单片机的智能搬运机器人设计杨正乐 任小强 于岗 河南理工大学摘要:伴随着人工智能的发展,机器人被广泛的运用到生产生活的各个方面。
本文设计了一种基于STM32F103单片机的物料搬运机器人,通过颜色传感器识别不同颜色的物块然后将其搬运到固定区域的设计方案。
关键词:单片机 颜色识别 物块抓取 电机控制智能搬运机器人配有多种传感器,可以精确识别路径、物块颜色以及对物块的抓取,对不同的场地有较好的适应能力。
其通过灰度传感器识别路线,自动选择最优路径定位物块以及指定存放点的位置。
使用颜色传感器识别物块颜色,利用数字舵机精确控制机械爪抓取物块。
一、控制系统设计1.系统组成此系统采用STM32F103单片机为控制核心,使用颜色传感器进行物块颜色识别、灰度传感器识别路径自动选取最优路径、数字舵机精确控制机械爪的运动、步进电机提供动力源可以实现精准定位。
整个控制系统组成如下:图1 控制系统组成图2.硬件设计系统硬件主要是有以下几个部分组成,单片机主控模块、电源模块、稳压模块、颜色传感器模块、步进电机驱动模块、数字舵机等。
2.1单片机控制板STM32F103系列使用高性能的ARM Cortex TM -M3 32位的RISC 内核,工作频率为72MHz,内置高速存储器(高达128K 字节的闪存和20K 字节的SRAM),丰富的增强I/O 端口和联接到两条APB 总线的外设。
所有型号的器件都包含2个12位的ADC、3个通用16位定时器和1个PWM 定时器,还包含标准和先进的通信接口:多达2个I 2 C 接口和SPI 接口、3个USART 接口、一个USB 接口和一个CAN 接口。
2.2颜色传感器颜色传感器使用的是TCS230模块,TCS230是美国 TAOS 公司生产的一种可编程彩色光到频率的转换器。
该传感器具有分辨率高、可编程的颜色选择与输出定标、单电源供电等特点。
输出为数字量,可直接与微处理器连接。
基于ARM处理器的智能机器人的设计与实现

基于ARM处理器的智能机器人的设计与实现近年来,智能机器人技术得到广泛应用,而基于ARM处理器的智能机器人更是备受瞩目。
本文将介绍基于ARM处理器的智能机器人的设计及实现。
一、设计思路智能机器人的设计需要从以下三个方面考虑:1.硬件方面:各种传感器、处理器等硬件的选型和布局设计。
2. 软件方面:智能机器人的控制系统、图像处理软件等的编写。
3. 机械方面:机器人的外形设计、机械臂的构造等。
基于ARM处理器的智能机器人,其硬件方面的设计中,首先需要确定ARM处理器的型号及其参数,如主频、内存容量、外设接口等。
另外,还需要根据机器人的应用场景,选用合适的传感器,如红外传感器、超声波传感器、视觉传感器等,并将传感器布局在合适的位置,以便机器人能够准确感知外界环境。
机器人的动力系统也是不可忽视的硬件部分,需选用合适的电机及其控制电路,以保证机器人能够完成各种动作任务。
在软件方面的设计中,需要编写机器人的控制系统软件,以便实现机器人的自主导航、避障、路径规划等功能。
此外,机器人的视觉处理软件也是非常重要的。
通过视觉传感器获取的图像信息,可以实现机器人的目标检测、物体识别等功能。
在机械方面的设计中,需要根据机器人的具体应用场景,设计出合适的外形和机械臂构造。
例如,在智能物流机器人中,需要考虑机器人的载重量和运载方式,因此需设计出合适的物品托盘和机械臂。
二、实现流程基于ARM处理器的智能机器人的实现流程,可以分为以下几个步骤:1. 硬件搭建。
根据设计方案,选购各种硬件器件,如ARM处理器、传感器、电机、电路板等,并进行组装布线。
2. 软件编写。
根据硬件搭建完成后的具体情况,编写控制系统软件、图像处理软件等。
3. 系统调试。
进行机器人的各项功能测试、参数调试,以验证机器人的性能是否符合设计要求。
4. 机械部分的制造和安装。
5. 软件部分的不断优化和更新。
三、应用场景基于ARM处理器的智能机器人适用于多个应用场景,如:1. 智能家居。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计随着科技的不断发展,智能家居产品也变得越来越普及。
扫地机器人作为智能家居产品的一种,已经成为现代家庭清洁必备的家电之一。
它能够帮助用户自动清扫地面,提高家庭生活品质。
现在市面上的扫地机器人种类繁多,功能也各异,而其中一些高端产品采用了STM32单片机作为控制核心。
本文将对基于STM32单机的扫地机器人设计进行详细分析和介绍。
一、STM32单片机简介STM32是由意法半导体(STMicroelectronics)推出的32位高性能微控制器系列产品,拥有强大的性能和丰富的外设资源,广泛应用于各种嵌入式系统中。
STM32单片机具有低功耗、高性能、丰富的外设接口等特点,适合用于各种智能家居产品的控制系统。
STM32系列产品的开发工具和技术支持也非常完善,为开发人员提供了便利。
二、扫地机器人的工作原理扫地机器人主要由底盘模块、定位导航模块、清扫模块、电源模块和控制模块等部分组成。
其工作流程一般包括地面扫描、路径规划、清扫作业和自动充电等环节。
控制模块起着核心作用,负责整个扫地机器人的工作流程控制和各模块协调。
三、基于STM32单片机的扫地机器人设计方案基于STM32单片机的扫地机器人设计主要包括底层硬件设计和上层软件设计两个方面。
1. 底层硬件设计底层硬件设计主要涉及各种传感器、执行器及外部设备的接口电路设计。
扫地机器人通常需要激光雷达、超声波传感器、轮式驱动器、吸尘器等硬件模块,这些模块需要与STM32单片机相连,并通过各种通信接口传输数据。
控制模块还需要设计供电管理电路,以便对各模块进行电源控制和供电。
2. 上层软件设计上层软件设计是整个扫地机器人系统的大脑,负责各硬件模块的控制和协调。
基于STM32单片机的扫地机器人控制系统通常采用嵌入式操作系统作为基础,如FreeRTOS或者RT-Thread。
控制系统还需要设计各种传感器数据的处理算法、路径规划算法和清扫作业控制算法等。
毕业设计开题报告 基于STM32单片机的魔方机器人设计

青岛理工大学毕业设计(论文)开题报告题目名称:基于STM32单片机的魔方机器人的设计学院:机电学院专业:电气工程及其自动化学生姓名:XXX学号:XXX指导教师:XXX职称:教授2019年12月17日毕业设计(论文)开题报告二、研究内容1.主要研究内容、目标及拟解决的关键问题(1)研究内容①功能设计:魔方机器人通过STM32单片机控制8个舵机,独立完成魔方的抓取、转体、以及单个面的旋转等功能。
通过颜色识别程序扫描魔方状态,实时传输给单片机,了解魔方复原过程,控制舵机进行对应的转动,从而复原魔方;②机械结构设计:机械部分首先通过CAD软件画出机械抓手、支架等单个部件的雕刻图,使用雕刻机雕刻。
材料选择亚克力有机玻璃作为主要材料。
另外使用四组滑轨滑块用来控制机械臂的前进与后退,从而控制是否握持;③硬件设计:硬件电路设计部分包括STM32配置电路部分、电源部分、舵机控制部分等;④软件设计:软件部分包括STM32控制主程序、不同模块的子程序和各个模块的子程序等;⑤设计完成后用AltiumDesigner10软件画出系统电路的原理图进行实物制作调试;系统测试:利用测试环境对设计的终端进行测试,统计测试结果改进监测终端。
(2)研究目标设计出一款可以将任何混乱程度的三阶魔方还原的魔方机器人,相对于以往的魔方机器人,在多个方面做出优化设计,使得机器人在稳定性和复原魔方的快速性方面达到更好的效果,通过颜色识别程序扫描魔方状态,实时传输给单片机,了解魔方复原过程。
通过STM32单片机控制8个舵机,独立的完成魔方的抓取、转体、以及单个面的旋转等功能。
对于精度要求极高的机械部分,采用亚克力雕刻组装来完成。
最终可以成功的复原任意打乱的魔方。
(3)拟解决的关键问题①使8个舵机的误差控制在5°以内,以及使机械部分精度达到标准;②魔方复原方法的程序设计。
2.拟采取的研究方法、技术路线、实施方案及可行性分析(1)研究方法查阅相关文献,了解国内外魔方机器人的现状,确定研究方案。
基于STM32单片机的老幼陪护机器人的设计
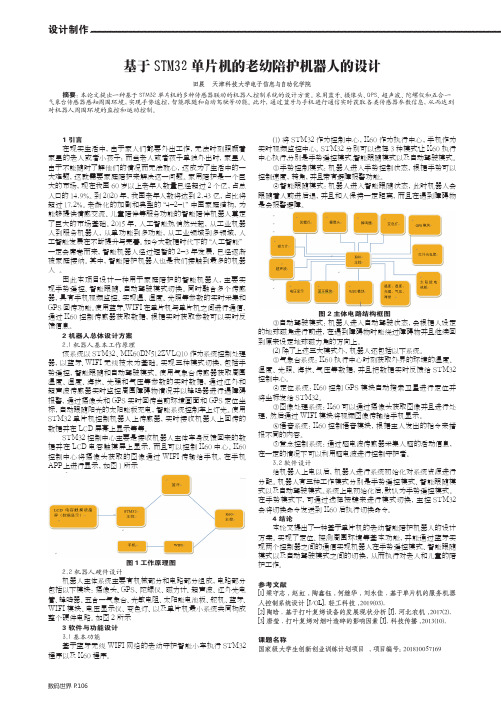
设计制作数码世界 P.106基于STM32单片机的老幼陪护机器人的设计田晨 天津科技大学电子信息与自动化学院摘要:本论文提出一种基于STM32单片机的多种传感器联动的机器人控制系统的设计方案。
采用蓝牙、摄像头、GPS、超声波、陀螺仪和五合一气象台传感器感知周围环境,实现手势遥控,智能跟随和自动驾驶等功能。
此外,通过蓝牙与手机进行通信实时获取各类传感器参数信息,从而达到对机器人周围环境的监控和运动控制。
1 引言在现实生活中,由于家人们都要外出工作,无法时刻照顾着家里的老人或者小孩子;而当老人或者孩子单独外出时,家里人由于不能随时了解他们的情况而无法放心,这成为了生活中的一大难题,这就需要家庭陪护来解决这一问题。
家用陪护是一个巨大的市场,现在我国60岁以上老年人数量已经超过2个亿,占总人口的14.9%。
到2020年,我国老年人数将达到2.43亿,占比将超过17.2%。
老龄化的加剧和典型的“4-2-1”中国家庭结构,为能够提供情感交流、儿童陪伴等服务功能的智能陪伴机器人奠定了巨大的市场基础。
2015年,人工智能热悄然兴起,从工业机器 人到服务机器人,从单功能到多功能,从工业领域到多领域,人工智能发展在不断提升与完善。
如今大数据时代下的“人工智能”一定会席卷而来,智能机器人经过短暂的2-3年发展,已经逐渐被家庭接纳。
其中,智能陪护机器人也是我们接触到最多的机器人 。
因此本项目设计一种用于家庭陪护的智能机器人,主要实现手势遥控、智能跟随、自动驾驶模式切换。
同时融合多个传感器,具有手机视频监控、实现温、湿度、光照等参数的实时采集和GPS回传功能。
使用蓝牙、WIFI在单片机与单片机之间进行通信,通过K60控制传感器获取数据,根据实时获取参数可以实时反馈信息。
2 机器人总体设计方案2.1机器人基本工作原理该系统以STM32、MK60DN512ZVLQ10作为系统控制处理器,以蓝牙、WIFI无线技术为基础。
实现三种模式切换,包括手势遥控,智能跟随和自动驾驶模式。
基于单片机的工业机器人控制器设计
基于单片机的工业机器人控制器设计在工业自动化领域中,工业机器人是一种非常重要的设备,广泛应用于生产线上,能够实现高效、精确、重复性强的操作。
而工业机器人的运动控制则是机器人运动的核心部分,决定了机器人的运动轨迹和速度。
基于单片机的工业机器人控制器设计,是指使用单片机作为控制核心,通过编程控制机器人的运动。
采用单片机作为控制器具有成本低、易于控制和可靠性高等优点,因此得到了广泛应用。
在基于单片机的工业机器人控制器设计中,常用的单片机有AVR、PIC、STM32等型号。
单片机的选择应根据具体应用场景的需求来确定,比如处理速度、存储空间、通信接口等。
在工业机器人控制器的设计过程中,需要进行以下几个方面的工作:1. 运动规划与控制算法设计:机器人的运动规划与控制算法是控制器设计的核心部分,它决定了机器人的运动轨迹和速度。
常用的运动规划算法有直线运动规划算法、圆弧运动规划算法等。
2. 电机驱动电路设计:机器人通常需要多个电机来驱动各个关节的运动,因此需要设计相应的电机驱动电路。
电机驱动电路一般包括功率放大器、驱动电流检测电路等。
3. 传感器接口设计:工业机器人通常需要安装各种传感器来感知周围环境,比如压力传感器、力传感器、光电传感器等。
因此需要设计相应的传感器接口电路,将传感器的信号转换为单片机能够处理的信号。
4. 通信接口设计:工业机器人通常需要与上位机进行通信,实现远程控制和监视。
因此需要设计相应的通信接口电路,如CAN总线、RS485通信等。
5. 软件开发:控制器的软件开发是基于单片机的工业机器人控制器设计的重要环节。
需要使用C语言或汇编语言编写控制器的程序,实现对机器人的运动控制和数据处理。
基于单片机的工业机器人控制器设计是工业自动化领域的重要研究方向之一。
通过对运动规划与控制算法的设计、电机驱动电路的设计、传感器接口设计、通信接口设计和软件开发等工作的实施,能够实现对工业机器人的高效控制和监控。
毕业设计(论文)--基于stm32的仿生机械手的设计与实现

学年论文题目:基于stm32的仿生机械手的设计与实现学生姓名:学号:专业班级:14级自动化1班指导教师:2016年8月5日目录第1章引言 (1)第2章STM32的基本理论知识 (3)2.1 STM32芯片的介绍 (3)2.2 STM32的库函数 (10)第3章设计的主体内容 (12)3.1 大脑——STM32开发板 (12)3.2 思想——用库函数写程序 (12)3.3 实物的机械设计 (27)3.4 实物的花样展示 (27)第4章结果的分析与讨论 (28)第5章结论 (28)参考文献 (29)第1章引言世界首个走向市场的最先进的仿生手“i-LIMB”赢得英国科技创新头奖。
仿生手手有5根可自由活动的手指,它击败了其他进入决赛的三项发明,荣获英国皇家工程学院2008年的麦克罗伯特(MacRobert)杰出科技创新奖。
在此次评奖中,其它进入决赛的三项发明包括一套照看保存在零度以下的数百万份生物样品的机器人系统、一个可以探测早期疾病迹象的化学传感器和一种专为柴油汽车设计的压缩型过滤器。
截至2007年7月,这项仿生手技术已用在200多人身上,包括在伊拉克战争中失去四肢的美国士兵和截肢者协会首席执行官雷·爱德华兹等。
英国最早配备这种装置的爱德华兹1987年因患霍奇金病而导致手脚都截肢了,他在装上i-LIMB仿生手1个月后说它改变了他的生活。
触摸仿生公司首席执行官斯图亚特·米德说:“i-LIMB仿生手是世界假肢市场中最引人注目的产品之一。
这种仿生手有2个主要的独特特点。
一是我们把发电机放进每个手指,让每个手指通过关节连接具有独立性;二是它的拇指能像我们的拇指一样弯曲90度。
它是首个在形状和功能上模仿人手的仿生手。
”触摸仿生公司小组的努力获得了英国科技界的认可,他们这次获得5英镑的奖金和一块金牌。
公众可以在2008年9月前到伦敦科学博物馆观看i-LIMB仿生手。
仿生手最早是为了帮助受镇静催眠药撒利多胺危害的儿童,作为一项研究项目的一部分,i-LIMB看起来和动起来就像真手一样。
基于STM32的嵌入式操作系统程序设计及实现本科毕业论文

本科毕业论文(设计)论文题目:基于STM32的嵌入式操作系统程序设计及实现姓名:学号:班级:年级:专业:学院:指导教师:完成时间:作者声明本毕业论文(设计)是在导师的指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
因本毕业论文(设计)引起的法律结果完全由本人承担。
毕业论文(设计)成果归武昌工学院所有。
特此声明作者专业:电子信息工程作者学号:0930********作者签名:年月日基于STM32的嵌入式操作系统程序设计及实现郝宇The Design and Implementation of embedded operating system program based on STM32Hao, Yu2013年5月20日摘要随着科学技术不断的进步,工业生产越来越先进复杂,操作系统µC/OS-II 是高效、稳定、可靠、节能的系统,广泛应用安防,消费电子中。
而基于Cortex-M3架构下的STM32是一款性价比优越新型微处理器,将µC/OS-II移植到STM32上能够发挥其高效的性能,从而投入社会生产,制造出很多有用又实惠的电子产品,为我们的生活带来便利。
本文主要的研究内容是µC/OS-II操作系统理论分析、移植方法、应用程序设计及调试仿真实现。
首先,对µC/OS-II的理论分析,研究其实际应用及系统结构;其次,分析STM32硬件平台及µC/OS-II的移植需求;最后,在µC/OS-II 上开发LCD,LED,按键KEY等应用程序,并对多任务系统调试分析。
主要研究结论如下:(1)µC/OS-II操作系统主要分为任务管理、内存管理和时间管理三大部分,其间通信是通过消息队列和消邮箱。
(2)µC/OS-II移植主要在OS_CPU.H,OS_CPU_C.C,OS_CPU_A.ASM三个文件中,涉及到数据类型、堆栈、中断定义和任务切换等。
基于ATmega32L单片机的灭火机器人的设计

传感 器 的选 择对 小车 是否 能够 出色完 成任 务也
l 方 案 的选 择 与论 证
通过 对 比赛 目标 和要 求 的分析 ,为 了能够更 快
起 到 了至 关重 要 的作 用 。在本 设计 中 ,检 测墙 壁 的 传感 器选 择接近 开 关 ,这 种传 感器 可 以避 免墙壁 颜
Abta tIt d cinwa d slds n dfef higrb trsn tre p u u r. T g 3 Ls gehpwa src:nr ut s o o ma e oa ef ei e r—g t o,aigawa ty e op t t e A mea 2 i lci s t g i i n o ej t t o f i n
后 ,这样 可 以很 好 的完成运 动转 向和 原地 转 向。整 体 上 有着 较 为严 格 的机 械 对 心 ,轻 盈快 速 易 于控
制。
控制 器采 用 的是A m g 3 L 片机 。A m g 3 L T e a2单 T e a 2 是一款 嵌入 式 高速 单 片机 ,功能 强大 ,价格低 廉 , 能够 出色地 完成 小车所 需要 的运行 动作 ,适 合于批
色 的干 扰 , 并且 返 回值 为数 字 量 ,省 去A D / 转换 的
更 好 的完 成 目标 ,从车型 、控制 器 、控制策 略和 灭 火方 式等 多个方 面均进 行 了精 心设 计 。
a o td a d r sc to o e f rt e s se t k n a e s n o , r x mi s t h g a a i n s n o , p i a n o e o c mp s e t d p e i h r wa e a on l r o y t m, a i g f m e s r p o i t wi , r d t e s r o tc l c d rt o o e t s n r c h l y c o e
基于STM32单片机的智能搬运机器人的设计
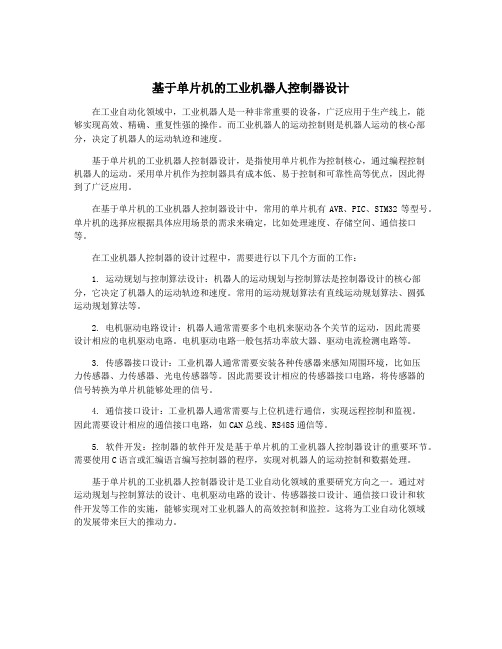
基于STM32单片机的智能搬运机器人的设计作者:黄钰深张晓培梁金耀赵明范碧纯来源:《科技视界》2019年第12期0 引言智能机器人带有多种传感器,可以将传感器得到的信息进行融合,有效地适应变化的环境[1]。
本文设计的搬运机器人只要在PC端上位机上设置搬运停放的位置,搬运机器人进行自主运动,根据指定的路线行进到指定位置。
1 智能搬运机器人系统设计方案系统设计中选用STM32单片机作为主控制器,负责接收指令和逻辑运算。
WI-FI模块作为搬运机器人与PC端上位机之间通讯的桥梁,负责传输数据以及各种指令。
使得PC端上位机可以实时控制搬运机器人。
电机及电机驱动模块及电机是系统的动力部分。
超声波模块负责检测搬运机器人在前进线路上是否有障碍[2],并作出调整直到搬运机器人道达指定位置。
系统的总体框图如图1所示。
2 智能搬运机器人硬件设计2.1 控制模块的选择STM32是一种常用的开发芯片,其运算速度快、精度高、能耗小等,并且易于开发。
本系统采STM32F103RCT6作为控制系统的主控制器,完成超声波信息收集、避障、行进、搬运等任务。
2.2 超声波传感器模块本设计的避障采用的是超声波测距离传感器。
超声波测距是通过发射超声波,在遇到障碍物后超声波会被反射被接收器接收到[3]。
其与单片机的接线图如图2所示。
2.3 电机驱动模块此系统的电机驱动模块采用L298N芯片。
在单片机接上模块相应的控制引脚,通过单片机即可控制电机的正、反转以及速度。
四个电机的不同状态的配合完成小车的前进、后退、左、右转等功能。
其与单片机的连接如图3所示。
2.4 WIFI通信模块本设计上位机和下位机进行数据传输采用的无线传输WiFi模块ESP8266。
其电路连接如图4所示。
3 系统软件设计部分3.1 UCOS操作系统为了使得系统实时性良好,本设计在单片机上运行了UCOS系统。
实时操作系统可以运行多任务,操作系统可以及时对任务进行处理[4]。
3.2 上位机界面设计该设计可以实现在上位机设置搬运机器人停放的位置。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计【摘要】本文主要介绍了基于STM32单机的扫地机器人设计。
在我们分析了研究背景和研究意义。
在首先介绍了STM32单机的特点,然后详细描述了扫地机器人的结构设计和STM32单机在其中的应用。
接着讨论了软件设计与实现以及硬件设计与实现。
最后在结论部分对设计进行了总结,并提出可能的改进方向和未来展望。
本文旨在为开发基于STM32单机的扫地机器人提供参考和指导,为智能家居和智能清洁领域的发展做出贡献。
【关键词】STM32单机、扫地机器人、设计、结构、应用、软件、硬件、设计总结、改进方向、未来展望1. 引言1.1 1. 研究背景在现代社会,人们把大部分时间都花在工作和生活中,而家务劳动则成为其中不可避免的一部分。
为了减轻人们的家务负担,提高家庭生活质量,扫地机器人应运而生。
扫地机器人是一种自动化清扫地面的家用电器,通过携带的传感器和智能控制系统,可以自主规划清扫路径,完成地面的打扫工作。
本文拟对基于STM32单机的扫地机器人设计进行深入研究,探讨STM32单片机在扫地机器人中的应用、软件设计与实现、硬件设计与实现等方面的关键技术,并对设计过程中的一些关键问题进行探讨与总结,为今后的智能家居设备设计提供借鉴和参考。
1.22. 研究意义扫地机器人作为智能家居设备的重要组成部分,已经在日常生活中得到广泛应用。
基于STM32单机的扫地机器人设计,不仅可以提高扫地机器人的智能化水平和性能表现,还可以推动单片机技术在智能家居设备中的应用和发展。
具体来说,该设计能够充分利用STM32单机的高性能和稳定性,实现扫地机器人的精准控制和智能化操作,提升用户体验和生活质量。
通过将STM32单机技术与扫地机器人结合,可以为智能家居设备领域带来新的技术突破和创新。
基于STM32单机的扫地机器人设计具有重要的研究意义和应用价值,对推动智能家居设备的发展和普及具有积极的促进作用。
2. 正文2.1 1. STM32单机的特点STM32单片机是一种微控制器芯片,具有体积小、功耗低、性能强大等特点。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计1. 引言1.1 背景介绍扫地机器人是一种能够自动清扫地面垃圾和灰尘的智能机器人,广泛应用于家庭、办公室和公共场所等各类环境。
随着人们生活水平的不断提高,对于清洁卫生的要求也越来越高,扫地机器人因其高效、方便、智能的特点而备受人们青睐。
随着科技的不断进步,基于STM32单片机的扫地机器人正逐渐成为研究和开发的热点之一。
STM32单片机具有低功耗、高性能、丰富的外设资源等优点,在嵌入式系统开发中得到广泛应用。
借助STM32单片机的强大功能和稳定性,扫地机器人设计师们可以实现更加智能化和高效化的设计。
本文将详细介绍基于STM32单片机的扫地机器人设计,包括系统架构设计、功能模块设计、传感器选择与应用以及控制系统设计等方面。
通过对这些内容的深入探讨,可以更好地了解基于STM32单片机的扫地机器人设计原理和技术实现,为今后的研究和应用提供参考和借鉴。
1.2 研究意义智能扫地机器人已经成为现代家居中不可或缺的清洁助手。
随着人们生活水平的不断提高以及工作节奏的加快,人们对家庭清洁的需求也越来越迫切。
而基于STM32单机的扫地机器人设计,可以更好地满足人们对高效清洁的需求。
研究意义在于提高家庭清洁的效率和质量,解放人们的双手,让他们可以更多地投入到工作和生活中。
通过对传感器及控制系统的研究与应用,可以使扫地机器人具备更加智能化的功能,可以更好地适应不同家庭环境,并具有更多的人性化设计,使其成为人们的贴心家务助手。
基于STM32单机的扫地机器人设计,还具有较高的可扩展性和灵活性,可以满足不同家庭对清洁需求的差异化需求。
本研究具有重要的实用意义和市场前景,可以为智能家居领域的发展贡献力量。
1.3 研究目的研究目的是为了通过基于STM32单机的扫地机器人设计,提高家庭和办公环境的清洁效率,减轻人力劳动的负担。
通过研究和设计扫地机器人,可以实现智能化的清洁服务,提高家庭生活质量和办公效率。
基于ATmega32A单片机的竞步体操机器人的研究与设计
本篇文章的研究成果被用于 2020 年中国机器人大 赛暨 RoboCup 公开赛的“工程竞技类机器人-类人形机 器人竞技全能赛”,规则除了要求体操机器人应具有人的 形状特征且能够短时流畅地完成常规体操动作如双手俯 卧撑、单手俯卧撑、前后滚翻、倒立、侧手翻和自选动作 外,还要求体操机器人具有直立行走的能力,这是此次比 赛规则的创新点和难点所在。常规体操机器人具有可独 立运行的双臂和双腿,其中手臂部分不少于 3 个自由度, 双腿部分不少于 2 个自由度。由于规则的改变,体操机器 人的类人形结构设计、机械结构设计、自由度个数的选择 和分配等问题的解决方法都与往常体操机器人有很大的 区别。本课题立足于常规体操机器人的创新发展,较为成 功地解决了设计中出现的很多新型问题,并在比赛中加 以运用最终获得了优异的成绩。
中图分类号院TP242
文献标志码院A
文章编号院2095-2945渊2021冤19-0071-03
Abstract: With the continuous development of science and technology, robots are widely used in all aspects of social production. Especially in industry, they gradually replace humans to complete dangerous and arduous tasks, thus greatly promoting the development of human society. Robot is a common name for all automated control machines that simulate the behavior or thinking of humans and other creatures. In recent years, robots have been developed in a more intelligent direction. Robotics technology is a comprehensive technology that combines sensors, bionics, artificial intelligence, mechanical design, control theory and other classic disciplines. Humanoid robot is a kind of robot with anthropomorphic appearance. The meaning of "humanoid" is that the robot has human -like perception, decision -making, behavior and interaction capabilities. Race walking gymnastic robots are a kind of humanoid robots, which have obvious head, arms, torso, and bipedal parts, which are in harmony with the structural proportions of the human body. The main purpose of researching race walking gymnastic robots is to study the structure of the human body, and explore how the degrees of freedom of the human body should be allocated on the robot to better complete many actions in daily life, so that the humanoid robot can have a better performance when imitating human actions for reference.
基于STM32单片机的智能搬运机器人的设计
基于STM32单片机的智能搬运机器人的设计作者:王文东王楠来源:《中国新通信》 2017年第14期一、引言智能搬运机器人是能够通过传感器感知环境中存在的障碍,通过路径规划实现在有障碍物的未知环境中面向目标的自主运动,并控制机械臂自主搬运物体的机器人系统。
它的设计背景是基于路径规划,涉及到机械、传感器技术、控制等多学科的设计融合。
二、智能搬运机器人控制系统设计本智能搬运机器人是基于STM32 单片机为控制核心,利用超声波传感器感知未知环境,并通过基于模糊控制的路径规划算法来实现在未知环境中的自主运行。
1、微控制模块的选择。
本系统采用STM32F103ZET6 作为控制系统的主控制器,完成传感器信息收集、电机控制、自主避障、自主搬运等任务。
STM32F103ZET6 是ST 公司推出的以高性能的ARM Corter-M3 的RISC 内核的芯片。
处理器有三种低功耗的运行模式和灵活的时钟控制机制,可根据系统设计要求对其进行合理的优化。
2、障碍物检测模块的设计。
模块使用三个超声波传感器对前方障碍物信息进行检测。
超声波传感器采用HCSR04超声波测距模块,此测距模块可提供2 ~ 400 cm 的非接触式距离感测功能。
其测距精度可达到3 cm。
它与外界相连接的四个端口分别为Vcc,GND,TRIG,ECHO。
其工作原理为主控制器提供一个10 μs 以上脉冲触发信号到TRIG端,该模块内部将发出8 个周期为40kHz 电平并检验回波,一旦检测有回波信号ECHO 端则输出回响信号,在主控制器端产生中断。
通过主控制器内部通用定时器计算发出触发信号到收到回响信号的时间间隔,从而可确定障碍物的距离。
3、电机驱动模块的设计。
必须通过专门的电机驱动电路来进行控制。
系统使采用L293D 专用电机驱动芯片作为小车左、右驱动轮的直流电机的核心功率模块。
L293D 为四重推挽驱动电路,可驱动2 个直流电机。
EN 为电机使能端。
使用主控制器通用计时器输出二路PWM 信号给EN 端。
基于STM32的智能搬运机器人的研究与设计
基于STM32的智能搬运机器人的研究与设计摘要:随着科技的发展,各种技术也随之涌现,机器人技术便是其中一种。
目前机器人技术已经大规模应用于工业生产中,成为工业化不可或缺的一环,而智能搬运机器人的快速普及是未来工业化发展的一个大的趋势。
它可以实现无人作业,可以节省大量的人力、物力、财力,实现高质量、高效率的生产。
本文主要讨论基于STM32单片机的智能搬运机器人的循迹、避障、电机控制、舵机控制以及传感器模块的功能。
关键词:STM32单片机;传感器;智能搬运0.引言随着科技的发展,搬运机器人在搬运市场中发挥着重要作用,但目前大部分搬运机器人太过单一无法有效的识别货物,因此本文研究设计的智能搬运机器人便可以很好的克服这一点还可以实现自动巡线与超声避障等功能。
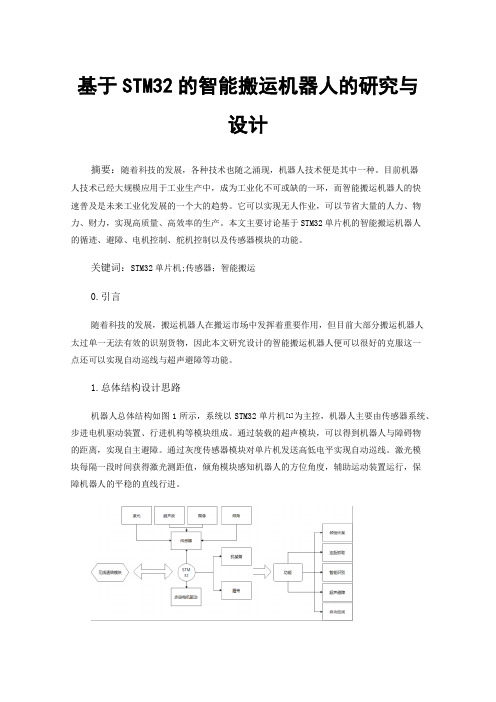
1.总体结构设计思路机器人总体结构如图1所示,系统以STM32单片机[1]为主控,机器人主要由传感器系统、步进电机驱动装置、行进机构等模块组成。
通过装载的超声模块,可以得到机器人与障碍物的距离,实现自主避障。
通过灰度传感器模块对单片机发送高低电平实现自动巡线。
激光模块每隔一段时间获得激光测距值,倾角模块感知机器人的方位角度,辅助运动装置运行,保障机器人的平稳的直线行进。
图1 总体结构2.智能搬运机器人设计2.1机械结构设计2.1.1行走结构行走机构是行走式机器人的重要执行部件,它由行走驱动装置、传动机构、位置检测元件、传感器、电缆及管路等组成。
行走机构一方面支承机器人的机身、臂部和手部,因而必须具有足够的刚度和稳定性;另一方面,还需根据作业任务的要求,实现机器人在更广阔的空间内的运动。
行走机构共有两种设计方案,均可满足控制需求。
方案一四轮式行走机构结构简单、运动平稳、移动速度快、易于控制四轮行走机构加装在机器人的机体下,提高了机器人的承载能力。
但四轮式行走机构需要四个电机,控制算法相对复杂,日需要很大的驱动电流对硬件要求较高。
方案二:履带式行走机构:运行平稳、可靠,履式行走机构将轮子与机构相结合,可实现在复杂环境的稳定行驶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM32位单片机的机器人设计毕业论文目录摘要 (2)Abstract (3)第一章引言 (4)第二章S3C44B0X控制器介绍 (6)2.1 S3C44B0X控制器管脚 (6)2.2 Samsung S3C44B0X介绍 (8)第三章ARM开发工具简介 (12)3.1 ARM开发工具综述 (12)3.2 ARM STD安装和应用 (13)第四章S3C44B0X部资源编程 (20)4.1 LED显示 (20)4.2键盘控制 (23)4.3 数码管显示 (24)4.4 中断控制 (25)第五章机器人的设计 (27)5.1硬件结构 (27)5.2软件设计 (31)5.3结论 (44)第六章展望 (45)参考文献第一章引言ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。
技术具有性能高、成本低和能耗省的特点。
适用于多种领域,比如嵌入控制、消费、教育类、多媒体、DSP和移动式应用等。
ARM将其技术授权给世界上许多著名的半导体、软件和OEM厂商,每个厂商得到的都是一套独一无二的ARM相关技术及服务。
利用这种合伙关系,ARM很快成为许多全球性RISC标准的缔造者。
目前,总共有30家半导体公司与ARM签订了硬件技术使用许可协议,其中包括Intel、IBM、LG半导体、NEC、SONY、菲利浦和国民半导体这样的大公司。
至于软件系统的合伙人,则包括微软、升阳和MRI等一系列知名公司。
ARM架构是面向低预算市场设计的第一款RISC 微处理器。
ARM提供一系列核、体系扩展、微处理器和系统芯片方案。
由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行(理论上如此)。
典型的产品如下。
①CPU核--ARM7:小型、快速、低能耗、集成式RISC核,用于移动通信。
-- ARM7TDMI(Thumb):这是公司授权用户最多的一项产品,将ARM7指令集同Thumb扩展组合在一起,以减少存容量和系统成本。
同时,它还利用嵌入式ICE调试技术来简化系统设计,并用一个DSP增强扩展来改进性能。
该产品的典型用途是数字蜂窝和硬盘驱动器。
--ARM9TDMI:采用5阶段管道化ARM9核,同时配备Thumb扩展、调试和Harvard总线。
在生产工艺相同的情况下,性能可达ARM7TDMI的两倍之多。
常用于连网和顶置盒。
②体系扩展-- Thumb:以16位系统的成本,提供32位RISC性能,特别注意的是它所需的存容量非常小。
③嵌入式ICE调试由于集成了类似于ICE的CPU核调试技术,所以原型设计和系统芯片的调试得到了极大的简化。
④微处理器--ARM710系列,包括ARM710、ARM710T、ARM720T和ARM740T:低价、低能耗、封装式常规系统微型处理器,配有高速缓存(Cache)、存管理、写缓冲和JTAG。
广泛应用于手持式计算、数据通信和消费类多媒体。
--ARM940T、920T系列:低价、低能耗、高性能系统微处理器,配有Cache、存管理和写缓冲。
应用于高级引擎管理、保安系统、顶置盒、便携计算机和高档打印机。
--StrongARM:性能很高、同时满足常规应用需要的一种微处理器技术,与DEC联合研制,后来授权给Intel。
SA110处理器、SA1100 PDA系统芯片和SA1500多媒体处理器芯片均采用了这一技术。
--ARM7500和ARM7500FE:高度集成的单芯片RISC计算机,基于一个缓存式ARM7 32位核,拥有存和I/O控制器、3个DMA通道、片上视频控制器和调色板以及立体声端口;ARM7500FE 则增加了一个浮点运算单元以及对EDO DRAM的支持。
特别适合电视顶置盒和网络计算机(NC)。
Windows CE的Pocket PC只支持ARMWindows CE可支持多种嵌入式处理器,但基于Windows CE的Pocket PC则只支持ARM一种。
微软在对SH3、MIPS、ARM等嵌入式处理器做了评估后认为,ARM是一种性价比较好的选择。
由于目前ARM在手持设备市场占有90%以上的份额,只支持ARM,可以有效地缩短应用程序开发与测试的时间,也降低了研发费用。
由于ARM开放其处理器授权,因此,用户在市场上可以在多家整机厂商中进行选择,从而保证了这一市场的竞争性。
ARM微处理器的特点ARM微处理器的特点采用RISC架构的ARM微处理器一般具有如下特点:1、体积小、低功耗、低成本、高性能;2、支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件;3、大量使用寄存器,指令执行速度更快;4、大多数数据操作都在寄存器中完成;5、寻址方式灵活简单,执行效率高;6、指令长度固定;。
ARM微处理器的应用领域到目前为止,ARM微处理器及技术的应用几乎已经深入到各个领域:1、工业控制领域:作为32的RISC架构,基于ARM核的微控制器芯片不但占据了高端微控制器市场的大部分市场份额,同时也逐渐向低端微控制器应用领域扩展,ARM微控制器的低功耗、高性价比,向传统的8位/16位微控制器提出了挑战。
2、无线通讯领域:目前已有超过85%的无线通讯设备采用了ARM技术,ARM以其高性能和低成本,在该领域的地位日益巩固。
3、网络应用:随着宽带技术的推广,采用ARM技术的ADSL芯片正逐步获得竞争优势。
此外,ARM在语音及视频处理上行了优化,并获得广泛支持,也对DSP 的应用领域提出了挑战。
4、消费类电子产品:ARM技术在目前流行的数字音频播放器、数字机顶盒和游戏机中得到广泛采用。
5、成像和安全产品:现在流行的数码相机和打印机中绝大部分采用ARM技术。
手机中的32位SIM智能卡也采用了ARM技术。
除此以外,ARM微处理器及技术还应用到许多不同的领域,并会在将来取得更加广泛的应用。
ARM运用和机器人设计ARM作为一项刚刚发展起来的新技术,具有很强的发展力。
由于是新生技术,因此在高校中只有研究生才开设这门课程,或者研究生在做研究型工作。
而在本科生中,由于各种原因,至今还没有开设这门课程。
因此,选择这个题目,一方面是希望能够在本科的学习阶段学习这门新技术,另一方面也是为以后在本科生开设这门课程做准备——开发实验系统。
在现有的(实验室拥有的设备)机器人的设计中,用的是摩托罗拉公司的68HC12单片机来进行开发的。
因此该设计希望将S3C44B0X运用在机器人身上,利用S3C44B0X优势,结合开放源码的UC/OS- II操作系统,开发出性能更高、可靠性更好的机器人。
第二章S3C44B0X控制器介绍2.1 S3C44B0X控制器管脚om[1:0]输入: om[1:0]设置S3C44B0X在测试模式和确定nGCS0的总线宽度,逻辑电平在复位期间由这些管脚的上拉下拉电阻确定.ADDR[24:0]输出: 地址总线输出相应段的存储器地址.DATA[31:0]输入输出:数据总线,总线宽度可编程为8/16/32 位.nGCS[7:0]输出:芯片选择,当存储器地址在相应段的地址区域时被激活.存取周期和段尺寸可编程.nWE输出 :写允许信号,指示当前的总线周期为写周期.nWBE[3:0]输出: 写字节允许信号.nBE[3:0]输出:在使用SRAM情况下字节允许信号.nOE输出 :读允许信号,指示当前的总线周期为读周期.nXBREQ输入: nXBREQ 总线控制请求信号,允许另一个总线控制器请求控制本地总线,nXBACK 信号激活指示已经得到总线控制权。
nXBACK输出:总线应答信号。
nWAIT输入:nWAIT请求延长当前的总线周期,只要nWAIT为低,当前的总线周期不能完成。
ENDIAN输入:它确定数据类型是little endian还是big endian,逻辑电平在复位期间由该管脚的上拉下拉电阻确定.nRAS[1:0]输出:行地址选通信号。
nCAS[3:0]输出:列地址选通信号。
nSRAS输出:SDRAM行地址选通信号。
nSCAS输出:SDRAM列地址选通信号。
nSCS[1:0]输出:SDRAM芯片选择信号。
DQM[3:0]输出:SDRAM数据屏蔽信号。
SCLK输出:SDRAM时钟信号。
SCKE输出:SDRAM时钟允许信号。
VD[7:0]输出:LCD数据线,在驱动4位双扫描的LCD时,VD[3:0]为上部显示区数据,VD[7:4]为下部显示区数据。
VFRAME输出:LCD场信号,指示一帧的开始,在开始的第一行有效。
VM输出:VM极性变换信号,变化LCD行场扫描电压的极性,可以每帧或可编程多少个VLINE 信号打开。
VLINE输出:LCD行信号,在一行数据左移进LCD驱动器后有效。
VCLK输出:LCD点时钟信号,数据在VCLK的上升沿发送,在下降沿被LCD驱动器采样。
TOUT[4:0]输出:定时器输出信号。
TCLK输入:外部时钟信号输入。
EINT[7:0]输入:外部中断请求信号。
nXDREQ[1:0]输入:外部DMA请求信号。
nXDACK[1:0]输出:外部DMA应答信号。
RxD[1:0]输入:UART接收数据输入线。
TxD[1:0]输出:UART发送数据线。
nCTS[1:0]输入:UART清除发送输入信号。
nRTS[1:0]输出:UART请求发送输出信号。
IICSDA输入输出:IIC总线数据线。
IICSCL输入输出:IIC总线时钟线。
IISLRCK输入输出:IIS总线通道时钟选择信号线。
IISDO输出:IIS总线串行数据输出信号。
IISDI输入:IIS总线串行数据输入信号。
IISCLK输入输出:IIS总线串行时钟。
CODECLK输出:CODEC系统时钟。
SIORXD输入:SIO接收数据输入线。
SIOTXD输出:SIO发送数据线。
SIOCK输入输出:SIO时钟信号。
SIORDY输入输出:当SIO的DMA完成SIO操作时的握手信号。
AIN[7:0] : ADC模拟信号输入AREFT输入:ADC顶参考电压输入。
AREFB输入:ADC底参考电压输入。
AVCOM输入:ADC公共参考电压输入。
P[70:0]输入输出:通用I/O口(一些口只有输出模式)。
nRESET:复位信号,nRESET挂起程序,放S3C44B0X进复位状态。
在电源打开已经稳定时,nRESET 必须保持低电平至少4个MCLK周期。
OM[3:2]输入:OM[3:2]确定时钟模式。
EXTCLK输入:当OM[3:2]选择外部时钟时的外部时钟输入信号线,不用时必须接高(3.3V). XTAL0模拟输入:系统时钟部振荡线路的晶体输入脚。
不用时必须接高(3.3V).EXTAL0模拟输出:系统时钟部振荡线路的晶体输出脚,它是XTAL0的反转输出信号。