基于DSP芯片的汽车定位防盗系统设计
基于DSP的导航计算机信息处理系统的设计与研究
性导航数据 , 利用 F82的 e A 21 C N模块实现导航计 算机和主控计算机之间的双 向数据通信。C N接 A 口电路设计 如 图 2所示 。
3 系统软件设计
导航信息处理系统软件开发选择德州仪器 r 提 兀 供的 C S 33 CV . 集成开发环境和 X S1 仿真器;A D 50 CN 总线通讯测试软件的开发选择微软 的 V + .。 C+ 60
2 1 耳第1 01 1 期
中图分类 号:N 1. T 9 17 文献标 识码 : A 文章编号:0 9— 5 2 2 1 ) 1 0 5 o 10 2 5 (0 1 1 — 0 4一 4
基 于 D P的 导航 计算 机 信 息处 理 系统 的设计 与研 究 S
涂 坤,曾连荪
( 上海海事大学信息工程学院 ,上海 20 3 ) 0 15
摘 要 :为 了采集到高精度、低差错率的导航参数,采用了高精度的 A D转换器件 A 6 7和 T Z D7 I 的 T 30 2 1 实现 对 微 机 械 陀 螺 、加 速 度 计 和 温 度 传 感 器 采 样 过 程 的控 制 , 同 时 利 用 MS2F 82来
T 30 2 1 MS2 F82的 e A C N模 块来 实现 与主控 计 算机 的数 据通 讯和地 面测试 。首 先介绍 了导航计 算机
11 导 航信息 处理 系统 设计 .
导航计 算机
(艟 3 02 1 ) T S 2 F 8 2 n C N AL
n
为采集高精度、 低差错率的导航参数 , 利用了高 精度的 A 67 D 7 将温度传感器、 陀螺仪和加速度计的 输出的模拟 信号转换 成数字 信号。T S2 F82 M 30 2 1 的 G I 口来 控 制 A 67采 样 过 程 , 时 利 用 PO D7 同 F82的 eA 21 C N模块、C 模块来实现与主控计算机 SI 和地面测试系统的通信。导航信息处理系统框图如
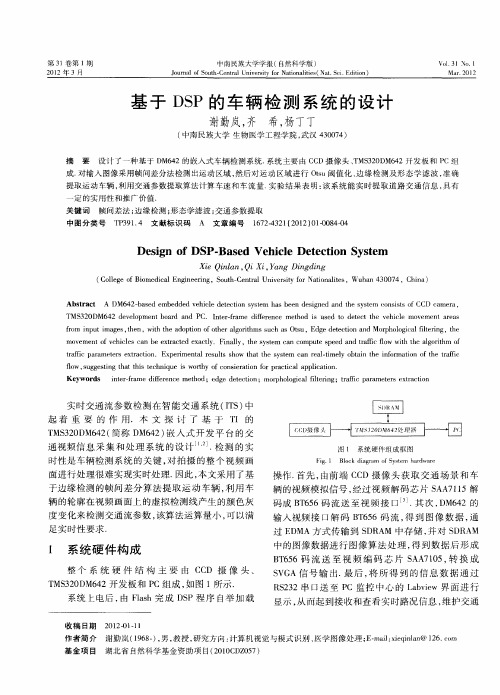
基于DSP的车辆检测系统的设计
关 键词
帧问差法 ; 边缘 检测 ; 形态学滤波 ; 交通参数提取
T 3 14 文 献 标 识 码 P9. A 文章 编 号 17 -3 1 2 1 )10 8 -4 6 24 2 (0 2 0 — 40 0
中图分类号
De i n o P— s d Ve c e De e to y t m sg f DS Ba e hi l t c i n S s e
l w, ug e tn h tti e h i ue i rhy o o ir to r c ia pp iai fo s g si g t a h st c n q s wo t fc nse a in f rp a tc la lc t n. o o Ke ywor s d i trfa fe e c t o n e — me di r n e me h d;e g ee to l f d e d tci n;mo p lgc lflei g;tafc pa a ee s e ta to r hoo ia trn i rfi r m tr x r cin
实 时交 通流 参 数 检测 在 智 能 交 通 系统 (T ) IS 中
起 着 重 要 的 作 用.本 文 探 讨 了 基 于 T 的 I
T 30 M 4 ( MS 2 D 6 2 简称 D 4 ) 入 式 开 发 平 台 的交 M6 2 嵌 通 视频 信 息 采 集 和处 理 系 统 的 设 计 ¨ 检 测 的 实 。. 时性是 车辆 检 测 系统 的关 键 , 拍 摄 的整个 视频 画 对 面进行 处 理很 难实 现实 时处 理 . 因此 , 文采用 了基 本
XeQ na , i iY n i dn i iln Q ,a g Dn i X g g
基于DSP的汽车防盗监控系统的设计

文 章 编 号 :0 9- 5 2 2 1 )5— 0 5—0 10 2 5 (0 2 0 0 5 4 中 图分 类号 :1 7 1P 7 2 文 献标 识码 : A
基 于 D P的汽 车 防 盗监 控 系统 的设 计 S
朱高 中
( 渭南师 范学 院物理与电气工程学 院 ,渭南 74 0 ) 100
c mb n st g t e n k st e a t t e t u cin c n b c iv d o i e o e ra d ma e h n i f f n t a e a h e e . h — h o
Ke wo d y r s: p l e;c nto ;c mmu ia in;p st n n oi c o rl o n c to o io ig i
t r s e n o mai n e o t t t e u lc e u t d p rme t T e e i p t a o e t e y t m o g a p t i fr t r p r o h p b i s c r y e a t n . h d sg h o i n us b v s se h
摘
要 :依 托 G S技 术 ,以 T M3 0 4 0为核 心 ,设 计 了基 于 D P的 汽 车防 盗监 控 系统 ,该 防 P S 2F2 S
盗监控 系统 包括 信号 采集 环 节、报 警 电路 系统 、视 频控 制 电路 和 通讯 系统 等 组成 。通 过 传 感 器 采集 到有 用信号 ,并把 信 号送到 D P 中央 处理 器 , 中央处 理 器 决 定是 否 启动 报 警命 令 ,G S 系 S P 统 负责 定位 汽 车的位 置 ,视频 控 制 系统 负责记 录 ,通讯 系统 各 种 信 息传 递 给 监 控 中心 和 车 主 , 以便 使监 控 中心和 车主 能及 时地 采 取 措施 ,把 所 掌握 信 息 报 告给 公 安 部 门。 文 中的 设计 正 是把
基于DSP的视觉导航智能车辆路径识别
1 智能车辆路径导航 的原理
1 1 基本原 理 .
根据地面设置 的条状导航路径和路面背景的图像灰度值 的差异 , 经过图像处理后便可识别出该导航
收 稿 日期 :0 1—1 21 I一1 5
基金项 目: 安徽科技学院人才引进 ( 稳定 ) 目( R 2 13 2 ; 项 Z C 0 10 ) 安徽科技学院重点建设学科车辆工程支持项 目( K K 0 0 — ) A X 2 12 5 。 作者简介 : 李进( 9 2 , , 18 一)男 安徽省蚌埠市人 , , 博士 讲师 , 主要从 事汽车电子与控制技术研究。
tp= + c h kr () 1
tn h
一k 盯
() 2
式中t 、 h t pi m分别为正负阈值。 为图像像素点的邻域均值, 盯为均方差; 为调整系数, k 具体见文献-。 9 J
4 8
安徽科 技学院学 报
2 3 最优 阈值计 算 .
使用最优阈值方法获取用于二值化路径 图像的阈值。与固定阈值方法相比, 最优阈值能够随着光照
凤阳 230 ) 3 10
( 安徽科技学院 机电与车辆工程学院 , 安徽 摘
要: 机器视觉由于具有多种优点, 在智能车辆导航 中得到广泛应 用。针对智能车辆路径导航直线模型
的缺点 , 出了改进方法和一整套处理流程 , 提 以及提高图像处理速度的措施 , 而保证 图像识别的鲁棒性 从
和 实时性 。 以德 州仪 器的 D C 4 E 6 3数 字信 号处理 器作 为 图像 采 集和 处 理芯 片, 智能 车辆 路 径识 别 系统 对
第2 6卷第 1 期
李
进
基 于 D P的视觉导航智能车辆路径 识别 S
4 7
一种基于DSP的SINS/GPS组合导航系统实现
漂移 。
状 态方 程为 :
X — F s X + G + W/s N () 2
系 统的 噪声 为 :
7 LS L 5N — J , , , , 硼 , 训 , , , j
1 引 言
目前 S NS GP I / S组 合 导 航 系 统 是 被 认 为 导 航
领域 最理 想 的组 合方 式 。捷 联 惯 导 系 统 ( I ) S NS 是
通过 测量 飞行 器 的角速 度 和加 速度 , 自动进 行 积 并
本 论文 将 基 于 TMS 2 F 8 2数 字 信 号 处 理 30 2 1 器 的平 台 , 使用 集 成惯 性 导航 I MU 元件 和 GP S接 收机 , 分别 建立 T 3 0 2 1 字 信 号 处理 器 与 MS 2 F 8 2数 I 单 元和 GP MU S单元 的通 信 , 架 出 一套 组 合 导 构
() 1
本 系统采 用 u lx公 司的 L A一 bo E 5型 G S接 收 P 模 块 。它是低 价 位 、 靠性 高 、 位 精 度 较 高 和低 可 定 功耗 的 1 2通道 接收机 , 以提供 丰 富 的导航 信息 , 可 并且 可 以由用户 定制所 需 的导航 信息 , 常适合 于 非
卡 尔 曼 滤 波器 取 S NS输 出的 导 航 参 数 的误 I 差作 为组 合导 航 的状 态量 , 因此 SNS的误 差 方程 I 就 是组合 导航 系统状 态方 程 的主要组成 部分 。 选择惯 性 导航系 统 的 3个位 置 误 差分 量 、 3个
速度 误差分 量 和 3个姿 态角误 差 分量 , 同时对 它 的 有色 噪声进 行扩 展 , 陀螺仪 和加 速度 计 的误差 作 将 为状 态分量 。
车辆定位防盗系统设计与实现
车辆定位防盗系统设计与实现摘要:经济的高速发展促进了人们生活水平的提高,汽车作为人们日常中的代步工具,伴随生活经济水平的提高也在不断的增多,汽车数量的持续增长,伴随而来的车辆被盗事件也在频繁的发生。
传统的车辆防盗产品,功能单一,技术落后,虽也具备声光报警功能,但防盗功能有限,特别是车主远离后,或者车辆停放位置无人时,声光报警功能显得非常的无力,这时就需要一种具有多功能、远程监控报警防盗系统的设计。
本文设计的车辆防盗系统主要功能就是利用GPS技术和GSM网络通信技术提供一种移动远程车辆报警定位防盗系统。
本文设计的车位定位防盗系统采用STM32F103C8T6单片机为控制核心的定位防盗系统,主要是利用GPS来实时的获取当前车辆的经纬度位置信息,并通过GSM网络发送报警信息和经纬度信息到车主的手机上,车主可通过手机发送控制指令来控制当前车辆的工作状态。
关键词:GPS, GSM, 震动传感器, 手机控制概述车辆定位防盗系统是通过STM32单片机作为控制端,震动传感器检测到异常,通过远程通信子系统把车辆的报警信息用短信的形式通知车主,车主收到短信回复相应短信内容,系统收到短信读取并解析,然后采取熄火、远程控制门锁等相应的措施,从而实现对被盗车辆移动的限制;再通过GSM网络将车辆的位置通过显示屏显示出经纬度的一种GPS跟踪定位设备。
1系统设计本设计使用STM32F103C8T6单片机为控制核心的定位防盗系统,且用户手机可以通过发送短信对车辆进行远程控制。
设计使用到了STM32F103C8T6单片机、传感器技术、GPS定位技术、GSM无线通信网络技术来完成。
1.1系统的整体方案设计实现系统的总体方案如图1所示。
图一1.2主控系统主控系统将选用STM32单片机中的STM32F103C8T6为处理器,STM32F103C8T6有48个IO口,内置64K字节的闪存存储空间,具有USB、CAN端口,以及7个定时器、2个模数转换器、9个通信端口,运行频率高达72MHz,因此处理能力很快,拥有周期乘法、硬件除法的存在,因此跑指令功能特别强。
基于DSP的SINS/GPS组合导航系统设计
DS 71 P6 3
DP AM R
_
A【:1] O 2
D[ :1 ] 0 5
_
E A[ : M 0
1] M 0 1E D[:
n[ : 0
1] 0 2D[:
DP RA M
DP AM R WE
DP RAM OE
1]M_ 5E WE
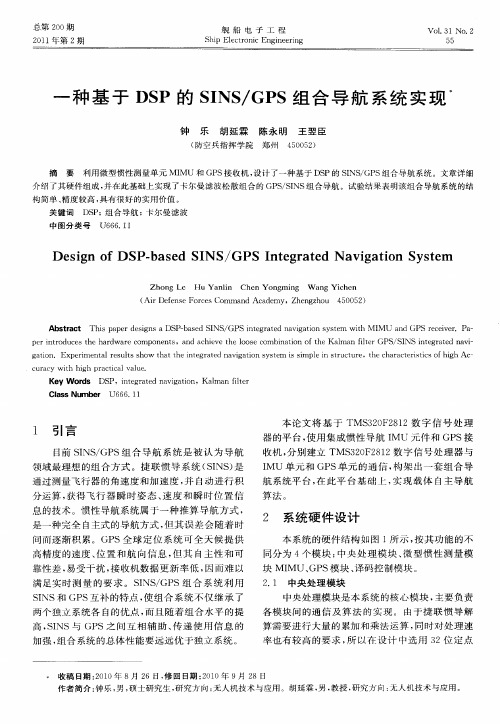
示 。本设 计采 用位 置 、速度组 合模 式 ,校正方 法选 为反 馈校 正法 。
11 数据采 集单 元 .
数据 采集 系 统 包括 SN 数据 采 集系 统 和G S IS P 数据 采 集 系统 。C L逻 辑 PD
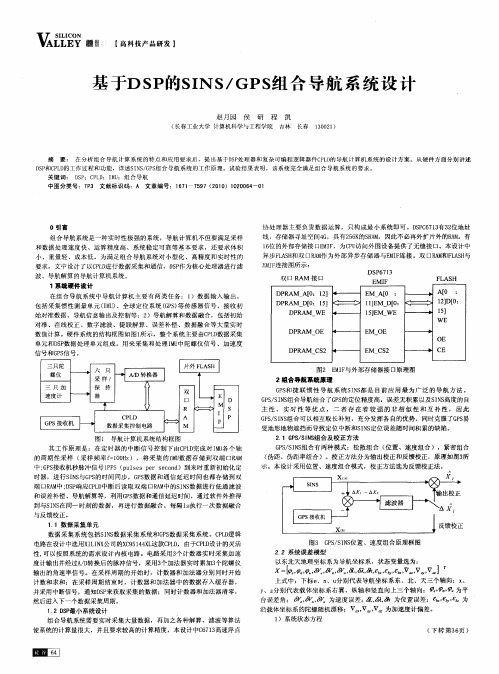
电路在设 计 中选 用XL N公 司 的X9 14L I IX C 54X 这款 CL , 由于CL 设 计的灵 活 PD PD 性, 以按照 系 统 的需求 设计 内核 电路 。电路 采用 3 计 数器 实 时采 集加速 可 个 度计输 出并 经过A D / 转换后 的脉冲 信 号 ,采 用3 个加 法器 实 时累加3 陀螺 仪 个 图3 GS SN 位置 、速 度组 合原 理框 图 P/ IS 2 2系 统误差 模 型 以东北 天地理 坐标 系为 导航 坐标 系 ,状 态变 量选 为 :
E M oE
1] 5
WE
数值计 算 。硬件系 统 的结构框 图如 图 l 所示 ,整个 系 统主要 由C L数据 采集 PD 单元和 DP 据处 理单 元 组成 。用 来采 集和 处 理IU S数 M 中陀 螺仪信 号 、加 速度 信号和G S P 信号 。
OE DP RAM 2 CS E 2 M CS C E
0引言
协 处理 器主 要 负责 数据 运算 , 只构 成最 小 系统 即可 。D P 6 1 有3 位地 址 SC 73 2
基于GPRS和DSP的汽车智能防盗系统设计
3 控 制 系统
负 责判断并采集汽车 的位置信息 ,视频 系统 负责 记录 偷车人的声 音 和 相貌 以便给公安机关 破案提供 线索和证据 ,声光告 警系统则会发 出刺耳 的鸣叫和亮光 以惊 吓偷车人 使其放弃 偷车 。在本 防盗系统 中 通 讯系统起着重要 的作用 ,它负责把 G S P 系统搜集 到的汽车 定位信 息和视频 系统 采集到的声 音图像等信 息传送给 监控 中心和 车主 ,以 使监控 中心能 及时地采取措 施 ,如查 询汽车现 在的位置 ,切断汽车 油路等 。本设 计正是把 以上 的系统有机 地结合 在一起而使 防盗功能
( ) 频设 备 。当任何 一种报 警信 号产生 时该 设 备将会 披启 1 视 动 ,以进 行 全 程拍 摄 ,并将 拍 摄到 的照 片 或视 频 资 料 通过 G R PS Moe dm以短信 或视频 的形式发送至 用户手机 或车辆监 控中心联 网的 计算 机 上 ,便于 向 警方提 供盗 贼 的线 索 ,有利 于公 安机 关 尽快 破
得以实现 。
1 传感器系统
当车 内出现火 灾或有人非 法打开车 门等情况 时 ,传 感器将信号 送给控制系统 (S 系统) DP ,该系统进行数据 判断 ,处理等操作后 决定 是否发短消息 、( 含报警信息和汽车位置信息 等) 图片或视 频信息给用 户手机 或 者控 制 中心 。然 后 ,用 户或 者控制 中心可 以远 程控 制车 辆 ,也可以利用G R 通过互联 网进 行数据传输 ,还 可以不通过互联 PS 网而通过移 动的数 据中心进行数 据的转 发 。
根据 汽车被盗 时距离车 主远近 的不 同,该系统有使 用It t n me e 网 络和不需使用ht t n me网络两种工作模式 。 e ( )当车主 驾车外出 ,车辆停 放位置与车主比较近 时 ,防盗监 1 测系统只需通过 G R 网络发短消息给 用户的手机 ,报告给车主汽 车 PS 现 在 的安 全状 况 ,而不 需要 上Itnt 络 ,这 样用 户在 短时 间 内 ne e r 网
基于DSP的车载智能移动报警监控系统设计与实现

佛体系结构, 并具有专 门的乘法单元和逻辑运算单
元, 在实 时性 处 理 速 度 和 价 格 上 具 有 一 定 的优 势 。
本 文选 用 的核 心 芯 片 为 T I 公司的 T MS 3 2 0 D M 6 4 2,
它是 一种 3 2位定 点型 的 D S P芯 片 , 具有 V L 1 w 体 系 结构 , 当 内部 工 作 时钟 到 达 6 0 0 M H z时 , 处 理 速 度 为4 8 0 MI P S , 该 芯 片 采用 超 长 指 令 结 构 和流 水 线 作 业 机 制 并 且 含 有 专 门 的 可 配 置 的数 字 视 频 端 口 ( V P 0 、 V P 1 、 V P 2 ) , 有 利 于视频 数 据信 息 的接 收 和发 送 。 同时 , D M6 4 2具 有 2级 缓存 结构 , 包括 1 6 k B程 序缓存 ( L 1 P) 和 1 6 k B数 据 缓 存 ( L 1 D) , 以及 2 5 6 k B的 L 2可 以配 置给 S R A M或者 C a c h e 。 核心 代 码 和数 据一 般都 调 入 C a c h e中 , 这 样 会 大 大 提 高程 序 警 监控 系统 设 计 与 实现
乔鸿海 ,薛 静, 徐 继伟 , 智永锋
7 1 0 0 7 2 )
( 西北工业大学 自动化学院 , 陕西 西安
摘 要 : 针 对 车载 智 能监 控 的要 求, 设 计 一 种 嵌 入 式 车 体 移 动 报 警 安 全 监 控 系 统。 系 统 以 T MS 3 2 0 D M6 4 2芯片为核 心 , 采用 简化 的 I t t i 模型 来提 取监控 画面的颜 色和亮度特 征 , 并检测 和分割 出 感兴趣 区域( R e g i o n s o f I n t e r e s t ) 。根据 R O I 质心相似 度的 变化 来判 断车辆 状 态。实验结果表 明 : 该系
基于高性能DSP的小型组合导航系统设计与实现
第2 卷 第4 6 期
21年 8 00 月
哈 尔 滨 商 业 大 学 学 报 (自然科 学 版 )
J u n l f r i nv ri f o o r a o bn U ies yo mmec Nau a S in e dt n Ha t C re( tr l c csE io ) e i
c l u ai g.Ac o d n o t ro d l fi riln vg t n s se ,a n e r t d n vg 。 ac ltn c r i g t hee r rmo e so t a a iai y tm ne o n i tg ae a i a
所 构 成 的 小 型组 合 导 航 系统 设 计 方 案 . 别介 绍 了导 航 传 感 器 的 选 择 及 系统 的 结 构 . 计 了以 r 高 分 设 n
性能浮 点 D P处理 器为核心的导航计 算机 , S 完成 数据 采集 和导航 解算等 功能 , 并根 据导航 系统误 差 模型融合各传感 器信 息 , 实现 了基于 K | n滤波 器的 组合导航 算法. a ma 通过原 理样机 的 实测数据验 证
电子信息工程毕业设计
电子信息工程毕业设计【篇一:本科.电子信息工程毕业设计题目大全】毕业设计题目总结下面是本人通过查各种资料以及老师推荐的、从各种参考书上摘下来的关于电子信息工程专业的毕业设计题目的枚举、希望对广大同学们有一定的帮助。
1、无线遥控门铃电路的设计与制作本题目要求设计一个遥控门铃,该电路包括发射系统和接收系统两部分。
当有人按动门铃按钮,发射机发出信号,同时,接收机在接收发射机发出的信号后,会发出悦耳的声音。
有效作用距离30米。
2,linux系统下web服务器的搭建与设计要求在嵌入式平台建立web服务器,其它电脑终端的浏览器输入ip 地址,可以访问,web服务器的内容除必要的说明文字及图像之外,需要实时显示ad转换的数据(与做ad转换驱动的同学合作)。
对学生的要求除嵌入式的相关知识外,需要有简单的网页设计知识。
3.光电控制书写提醒器的设计与制作本题目要求设计一个书写提醒器,该装置包括发射电路、接收电路、测光电路及延时电路几部分。
该装置的作用是监测书写者头部位置,在书写者头部位置过低时会发出声光报警。
4、远离提示电路的设计与制作本题目要求设计一个远离提示电路。
该电路包括发射系统和接收系统两部分,可用于儿童看护和贵重物品防盗。
要求其有效作用距离为15米,即当带有发射器的儿童或贵重物品在离开预定地距离15米以外时,接收器会发出报警声。
5、声光双控楼道灯控制器的设计与制作本题目要求设计一个楼道灯控制开关,在天黑或光线较暗时,若有一定的声音(如较近的脚步声、击掌声等),均会控制电灯点亮,且在电灯点亮一小段时间后,自动控制电灯熄灭。
电路在白天不起作用。
6、交通信号灯控制电路的设计与制作本课题要求设计一个符合某地交通要求的交通信号灯控制器,用于控制十字交叉路口处设置的红、绿、黄三色信号灯(设计中用相应的二极管代替)及转向信号灯。
7、红外光控防盗报警器的设计与制作本题目要求设计一个红外防盗报警器,在有人进入未经允许的区域(如靠近防盗物或破门而入)时,该装置发出报警声。
基于DSP的防汽车追尾应急系统的研究与设计
毫米 波雷达 测距 不易 受对 象表 面形 状和 颜色 影 响, 雨 、 、 、 受 雪 雾 污秽 、 阳光 的干扰 小 , 测性 能下 降 探
较 高时 , 旦 出现 意外情 况 , 来不 及 避让 …。为 了 一 就 尽 可能 地 减少 这类 交 通 事故 , 于 防汽 车 追 尾 的应 对
2 几种汽车测距技术 的比较
目前 . 车 常 用 测 距 方 式 有 4种 [: 声 波 测 汽 超 ]
距 , 米波 雷达 测距 , 毫 摄像 系统 测距 和激 光测 距 。
超声波虽然对雨 、 、 的穿透能力强 , 雾 雪 传输过
程能量 衰减 较小 , 射能 力较 强 , 是 只适合 于测低 反 但 速和较 短 的距离 ,作 为高 速行 驶车 辆上 的测 距传感
前言
随着 T业 的飞速 发 展 , 路 建设 尤 其 是 高速 公 公 路 的建设 更是 突 飞猛进 。汽车数 量 的增加 和 汽车速 度 的加 快 , 致 了交通 事故 的增 加 。 0 7 , 国共 导 20 年 全
发 生道 路 交 通事 故 3 7 0 2 2 9起 , 中 , 速 公 路追 尾 其 高 事 故 和连 环追 尾 事 故 占很 大部 分 , 给生 命 和 财产 造 成 了 巨大 的损 失 。追 尾 事故 发 生 的原 因 , 根结 底 归 就是 : 同一车 道 的两辆 车相 对距 离过 小 , 当行驶 速度
c r s o d n r k n a u e a c r i g t I k n s o e s ot s s f itn e . c u e DS s u e o r p n i g b a i g me s r c o d n o a 1 i d ft h r t ae d sa c s Be a s P i s d.c mp r d wi h o me e h e o ae t tefr r h e r e c y tm rv n i g a t mo i i u h c s b s d o h n l h c i t g ae i u t th s q ik rd t r c s i g me g n y s se p e e t u o b l p l p w ih i a e n t e mo oi i n e rt d c r i,i a u c e aa p o e s n e e t c n
基于DSP的汽车智能组合仪系统设计
系来计算汽车 的车速和行使里程。 22 S . D P测量脉冲频率 的原理 在本论文 中, 把通过二极管 限幅电路 的输 出脉 冲信 号直接送入 D P的 ,S S D P采用多周期同步测频法将 D P S
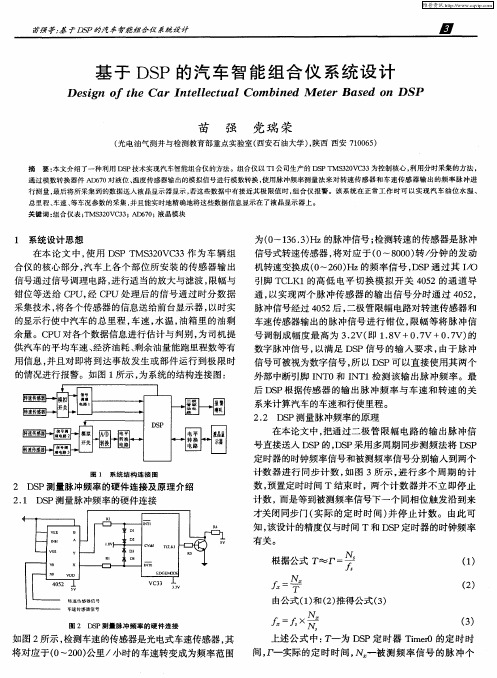
图 1 系统 结 构 连 接 图
2 D P测 量脉 冲频 率 的硬 件连 接及 原 理介 绍 S
采集技术 , 将各个传感器的信息送给前台显示器 , 以时实 的显示行使 中汽车 的总里程 , 车速 , 水温 , 油箱里的油剩 余 量 。C U 对 各个 数据 信息 进 行 估计 与 判别 , 司机 提 P 为 供 汽 车 的平均 车 速 、 经济油 耗 、 剩余 油 量能跑 里 程数 等有 用信息 , 并且对即将到达事故发生或部件运行 到极 限时 的情 况进 行报 警 。如 图 1 示 , 系统 的结 构连 接 图 : 所 为
通, 以实现两个 脉冲传感器的输 出信号分时通过 45 , 0 2 脉冲信号经过 45 后 , 02 二极管限幅电路对转速传感器和 车速传感器输 出的脉冲信号进行钳位 , 限幅等将脉冲信 号调 制 成 幅 度最 高 为 32 即 18 十0 7 t .V) .V( .V .V-0 7 的 -
定时器 的时钟频率信号和被测频率信号分别输入到两个 计数 器 进 行 同 步计 数 , 图 3所 示 , 行 多 个 周 期 的 计 如 进 数, 预置定时时间 T结束时 , 两个计 数器并不立 即停止 计数 , 而是等到被测频率信号下一个 同相位触发沿到来 才关闭同步门( 际 的定 时时间 ) 实 并停 止计数 。由此 可 知, 该设计的精度仅与时 间 T和 D P定时器 的时钟频率 S
数字 脉 冲信号 , 以满 足 DS P信 号 的输 入 要 求 , 由于 脉 冲
基于DSP轴承故障诊断系统的设计

基于DSP轴承故障诊断系统的设计摘要:本系统主要适用于轴承振动信号数据采集和分析,可以实现对信号的时域和频域分析。
该本系统硬件部分是以dsp为核心进行振动信号的采集与分析,软件部分是采用c语言与汇编语言编制,利用小波变换对信号进行处理。
该系统也可以进一步推广到其他振动信号的采集与分析。
abstract: a diagnosing system has been designed for the detection of the surface defects of element bearing. it is mainly based on sampling and analyzing the vibration signals for time and frequency domains. the diagnosing system of data acquisition and realization based of dsp, and the basic principle of it is wavelet transform. the software is written in c language and assembly language. the system is suitable to diagnose the rolling elements bearing, and is possible to be extended to the application of other mechanical vibration signals.关键词:轴承;dsp;小波变换;故障诊断key words: element bearing;dsp;wavelet transform;fault diagnosis中图分类号:tp311 文献标识码:a 文章编号:1006-4311(2013)23-0053-020 引言本文研究内容是以数字信号处理器(dsp)为核心,设计一套集数据采集与分析为一体的故障诊断系统,以功率谱分析在机械故障诊断中的应用和小波变换在信号处理中的应用为基础,用数字信号处理技术提取轴承的故障特征信息,编制计算机软件,辩识轴承滚动体、内环、外环的故障。
基于DSP的安全控制系统设计与实现

2 0 年之前 , 00 工业设备的安防系统一般都采用热释电传感器
处 理 速 度快 和 扩 展 能 力强 等 特 11 于 该 P C的工 业 码 垛 机 作为信号采集器件。 2 0 年以后 , 3 。基 4 L 但 00 光电传感器因具有响应时问短 、 器 人 控 制 系统 框 图 , 图 4 示 : 者 所设 计 的新 型 工业 码 垛 机 器件功耗小 、 如 所 笔 稳定性高 、 抗干扰能力强等优点, 而热释电传感器稳定
TMS 0 81 n SD40 3 4 32 F2 2 a d I 0- te c r o h o e c mpo e t . e l lt ig o o e u i y t m sc n tu t n n s a n w Pa e i n r b ts c rt s se i o s r c - z y
关 键词 : 传感器 ; 工业码垛机 器人 , 防系统 ; I 安 抗干扰设计 【 b ta t I i h rbe si tesc ryss m o t dt nl n uta q im n, e e 一 A src 】 nv w o e o lm eui t r io a id s i e u e tt 。 e ft p nh t ye f a i r l p hf
针 对 工业 机 器 人 安 防 技术 面临 的严 峻 形 势 , 以新 型 工 业 将
码垛机器人为研究对象 , 在深入调研国内外工业机器人安 防技术 的基础上 , 通过理论研究与技术探索 , 力求搭建 出一套功能完备 、
性 能稳 定 、 时 性好 、 靠性 高 、 干 扰能 力 强 的工 业 码垛 机 器 人 实 可 抗
个电源芯片 , 笔者选定利用一片 L 17稳压芯 片来将 5 M1 1 V的稳 压 电流降为 3 使具有输出电源稳定 、 V, 功耗小 、 成本低等特点 。 相
基于DSP的车载音频系统设计
基于DSP的车载音频系统设计随着汽车产业的不断进步和发展,车载音频系统在普及和质量上都有了很大的提升。
而车载音频系统的核心,在于数字信号处理(DSP)技术的应用。
本文将从基本概念、硬件设计、软件设计和音效处理四个方面,探讨一下基于DSP的车载音频系统的设计。
基本概念数字信号处理(DSP)是一种将模拟信号转换为数字信号,再用数字电路处理信号的技术。
由于汽车所处嘈杂的交通环境中,很难获取准确的模拟信号,所以数字信号处理在车载音频系统中显得尤为重要。
硬件设计车载音频系统的硬件设计包括采样芯片、数字信号处理器、功率放大器、音频解码器和音箱等,其中数字信号处理器是整个系统的核心。
数字信号处理器需要具备高计算速度和稳定性能,以确保信号的处理精度和音质的清晰度。
DSP的选型时需要综合考虑其性能和成本,常用的DSP芯片有德州仪器的TMS320系列、ADI的SHARC系列、XMOS的XS1系列等。
这些芯片具有不同的性能水平和应用范围,可以根据不同的需求进行选择。
在设计音频解码器时需要等到车载音频系统支持多种音频格式播放,如MP3、WAV、FLAC、APE等。
此外,车载音频系统基于DSP的硬件设计还需要考虑音频输入的方式、电源管理、防干扰等因素,以保证音质的稳定和可靠性。
软件设计车载音频系统的软件设计也是基于DSP的。
如果采用高效的DSP算法,就能够提升音质和效果,并且具备高的可扩展性和灵活性。
软件设计需要涉及DSP芯片的代码编写和程序调试,采用C语言、汇编语言等开发语言,调试工具等以及适当的优化,使得程序代码高效、紧凑。
音效处理在车载音频系统的设计中,音效处理是非常重要的。
通过DSP技术处理,可以实现各种音效效果,比如卡拉OK唱歌的混响滤波器、3D环绕音效等。
汽车所处交通环境嘈杂,对于车载音频系统来说,去噪、残声抑制等技术尤为关键。
DSP 技术可以使得车载音频系统在不同场景下,自动调整音效效果,并且实现声音的均衡和混合处理,给人以舒适、自然的感觉。
基于DSP技术汽车定位防盗系统的体系结构研究
的I /O 口。 MS 2 L 2 0的 D P芯 片的 I T 30 F 4 S /O端 口
都具 有 复用 功 能 , 因此 只需 在控 制 寄存 器 中设置 信 息使 I /0作 为通 用 I /0即可 。 以 D P为控 制 器 的 系统 在 开机 运 行 初始 化 后 , S 将 处于 不停 地 接 收汽 车位 置信 息 的状 态 中 , 时 系 同
车导航 、 定位和 防 盗奠 定基础 。 关键 词 : 汽车 定位 防盗 系统 ; S 控 制 器; P 接 收模 块 ; 线 G M通信 模 块 DP GS 无 S
1 概 述 、
随着人 们 生 活水 平 的 提 高 ,汽 车 已逐 步进 入 家 庭 ,对 汽车 防盗 的要求 越来 越 高 。尽 管 市场 上 的汽
导 和指 挥 。
G M 格 式是 目前手 机 使 用 的 主要 制 式 , 市场 S 在
技术 也越来 越 高 , 人 防不胜 防 。 使 汽车 防盗 无论 是对
上 占有 8%以上 的份额 。 G S与 G M 结合 起来 , 0 把 P S
不 仅可 以利 用 G S技 术进 行 汽车 的全 球 定 位 , 现 P 实
要求 控 制 系统 返 回当前状 态 时 , 制 系统 会 根 据 目 控 前 系统 的状 态来 做不 同 的响 应 :当 未处 于设 防状 态 时 , 制 系 统 将 发 送 还 没 设 防(ee e n’st 控 df ssst e 的 n i t )
短 消息 给用 户 ; 当处 于设 防状 态下 , 系统完 好 则会 发
l ;D 鬻 投 入 S {0P 虮
l 幔报输入 歼关 J7 棚 '  ̄ -
l 通试横城 卜 气 产
基于DSP的音频信号处理与放大系统设计(毕业设计)

基于DSP的音频信号处理与放大系统设计一、前言数字信号处理(DSP)技术在音频处理中得到了广泛的应用。
本文旨在设计一个基于DSP的音频信号处理与放大系统,实现对音频信号的处理、调节和放大。
该系统采用了TMS320C6713 DSP芯片作为核心处理器,能够实现高效率、高精度的数字信号处理。
本文将从系统设计的需求出发,分析系统架构、设计参数、算法实现和系统性能等方面进行详细阐述。
二、系统需求分析输入/输出该系统的输入为音频信号,一般来自音频采集器、CD、MP3等设备。
输出为音频放大信号,一般连接至功放、扬声器等设备。
为保证音频信号质量,系统应具有输入阻抗高、噪声低、失真小的特点。
放大输出信号应具有高保真度、低失真度、大输出功率等特点。
系统性能该系统应满足以下要求:(1)输入阻抗:> 10kΩ(2)噪声:< 0.1mV(3)失真:< 0.1%(4)输出功率:> 50W(5)频率响应:20Hz-20kHz(6)信噪比:> 90dB(7)总谐波失真:< 0.5%系统算法系统应支持以下算法:(1)音频采集(2)滤波处理(3)音量调节(4)均衡器(5)混响效果三、系统设计系统架构该系统采用了TMS320C6713 DSP芯片作为核心处理器,外围连接音频采集器、音频处理器、音频放大器等模块。
系统框图如下所示:+--------+ +--------+ +--------+|音频采集器|------->| DSP芯片|------->| 音频放大器|+--------+ +--------+ +--------+|+--------+| 音频处理器|+--------+系统参数(1)输入阻抗:系统采用运放作为输入级,输入阻抗可达到10MΩ以上。
(2)噪声:系统采用低噪声运放,噪声可控制在0.1mV以下。
(3)失真:系统采用高精度ADC/DAC芯片和高质量音频放大器,失真可控制在0.1%以下。
基于DSP目标入侵检测系统的设计

Science &Technology Vision 科技视界※基金项目:西安文理学院大学生创新创业训练项目(201230)。
通讯作者:代超(1993.02—),男,汉族,四川南充人,西安文理学院物电学院本科生,曾参加第八届飞思卡尔智能车竞赛获西部赛区摄像头组二等奖,主持并参与大学生创新创业训练项目各一项,研究方向为运动目标跟踪。
0前言随着社会的快速发展,越来越多的生产和生活场所需要对一些禁止区域(例如仓库、变电站、银行等)进行实施监控及布防,以计算机技术和图像处理技术为基础的目标入侵检测技术显得尤为重要。
目标入侵检测技术不仅可以快速、准确的判别出禁止区域内非法入侵者,还可以有效地保护了人员和财产的安全、高效地处理了危机。
目标入侵检测技术在实现时涉及大量的数字信号处理算法,而一款DSP 处理器TMS320DM642既可以快速、准确地实现这些算法,还提供了音视频接口,使用方便,因此成为目标入侵检测技术实现时常用的一种处理器。
1目标入侵检测的原理对运动目标进行入侵检测,首先要建立监控画面的背景模型并标识出禁止区域(即有利害关系的区域),其次要对监控画面中的运动目标进行准确定位及标识,最后由系统根据运动目标与禁止区域的位置关系进行有效地系统预警。
1.1高斯分布背景模型的建立对监控画面中的运动目标常用的检测方法有:相邻帧差法、背景帧差法、光流法[1-2]。
其中,相邻帧差法是将连续两帧进行相减,从中提取运动目标的信息。
虽然该算法计算量小,但是对光线变化不太敏感,甚至运动目标状态改变过慢将无法正确识别[3]。
光流法是利用计算位移向量光流场来检测运动目标,该方法运算量大、实时性差。
背景帧差法是将当前帧与背景模型进行比较,判断像素点是属于运动目标区域还是背景区域。
背景帧差法对光照变化、气候等环境因素较为敏感,适应性较弱[4]。
但是较之前两种方法而言,背景帧差法由于算法简单,易于实现,且能较为准确的提取运动目标信息,因此是应用最广泛的目标检测方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
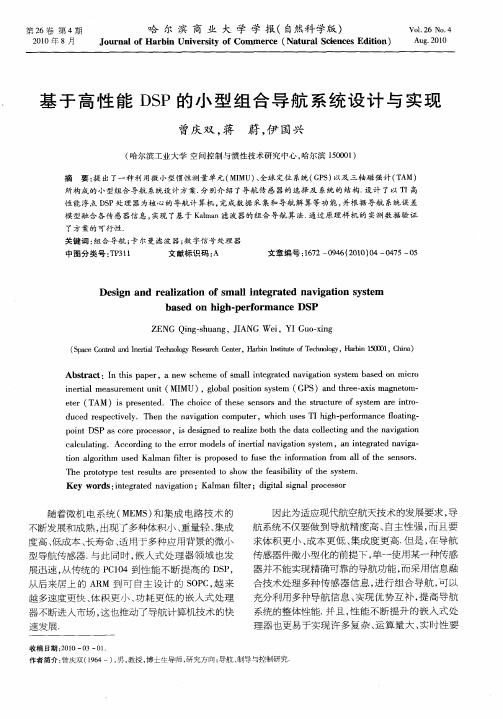
定位防盗功能的系统其结构框图如图所示。 在此系统中 &’( 对 于 B(’ 和 B’C 模 块 都 要 通 过 串 口 控 制 , B’C 模 块 与 &’( 本 检测控制 身的串口连接, 利用 D!)$ 扩一串口供 B(’ 模块使用。 及其辅助电路都可以直接使用 &’( 的 E F G 口。 :C’H!"I!*" 的 此时, 只需要在 控 制 器 寄 存 器 中 设 置 E F G 端口都具有复用功能, 使 E F G 做通用的 E F G 用即可。
图$
系统结构框图
以 &’( 为控制器的系统在开机运行初始化后, 将处于不停 地接收汽车位置信息的状态中,同时系统也在等待检测状态和 接受用户查询的消息中断。一旦有中断产生就会转移到相应的 中断子程序去处理。 若系统的设防信号无效, 则控制系统不进行 上述操作。 系统在设防信号有效后, &’( 主要循环处理 B(’ 接收机收 到的位置信息。 每一次有获得新电文标志, 则调用子程序进行电 文处理, 主要是分离电文中有用的信息如经纬度、 时间、 校验和 等,并把这些数据存入指定的存储空间。无线通信模块 :@H): 也是通过串口和 &’( 进行信息交换的, 在此串口接收是用中断 来取得使用控制器的权力。如有异常车况发生如设防情况下的 车门开起, 发动机启动等也将会向 &’( 发出中断请求。在软件 中把 :@H): 引起的中断设为低优先级, 即在车况发生异样 同 时 有车主主动查询消息,则 &’( 控 制 器 不 会 响 应 :@H): 的 中 断 申请。 若 &’( 控制器接收到中断申请, 并判断检测到是发动机启 动信号引起中断 (可以延时一定时间, 如 $""5, 在检测一次, 仍 然有效才确定为启动信号有效, 这样可以防止误操作) 。系统将 处理发动机启动中断服务子程序, 即将发送短消息给用户 (也可
-"5 网 络 和 控 制 器 之 间 的 信 息 交 换 利 用 了 65"),*8,9* 的 中 断系统。图 ) 给出了处理发动机启动的中断服务子程序流程图。
!
系统的软件设计 软件主要完成三个方面的任务: 初始化系统各个部分, 循环
图) 处理发动机启动的中断服务子程序流程图
处 理 -#" 接 收 到 的 电 文 信 息 ; !"# 控 制 器 与 67)$6 的 通 信 联 系, 实现人车之间的双向通信; 处理异常车况。这三方面的任务 在程序中是分两部分来完成的即主程序和中断处理。主程序主 要完成系统初始化和对 -#" 电文处理, 而串口工作和车况异常 的处理都是通过中断实现的。
Z
F"7;76M( H *T))J F"7;#G; H *TX*J F#N!N6N;G H *T(**J F;5G H *T((J
< < 使 "7; 脱离复位状态 < < "7; 中断为低优先级 < < 使能 :NG6 中断 Y;?6( 、 ;?6$
"
结束语 汽车定位防盗系统是一个非常复杂的系统,本文对系统的
《工业控制计算机》 !""# 年 $% 卷第 ! 期
$
基于 &’( 芯片的汽车定位防盗系统设计
&+,-./ 01 2340506-7+ (0,-4-0/-/. 8/9 :;+14<2.8-/,4 :+=;/070.> ?8,+9 0/ &’( @;-A
广东 广州 )$"*")) 王庆香 (广州中医药大学信息技术学院, 广东 广州 )$"""") 孙炳达 (广东技术师范学院,
目前各汽车厂家都在不断的改进防盗技术,尤其是随着微 电子技术的进步,汽车防盗技术已向着自动化、智能化方向发 展。汽车电子防盗装置, 具有质量轻、 占用空间小、 传感精度高、 处理速度快、 信息容量大等特点, 非法解除防盗装置锁技术难度 大, 其安全性较高。随着各种高性能传感器、 微电脑和卫星导航 技术在汽车和汽车运输管理上的应用,汽车智能化防盗技术也 应运而生。 汽车定位防盗系统是采用一种全新的定位概念,它成功地 依托 B(’ 系 统 与 B’C 通 讯 网 络 , 进行手机与汽车的智能联动 来实现定位与防盗。本文设计的系统具车辆定位、 实时监控、 远 程报警、 远程控制、 防盗反劫等多种功能; 且无声光噪音污染, 更 符合环保要求。通过手机接收基站的短信息和定位程序计算出 汽车的即时位置实现定位和实现跟踪。 在设防状态下, 如车辆受 震、 车门打开、 或车辆启动、 报警器将不受距离限制自动发出相 应的警报短信到车主的手机上,同时车辆还会发出声光报警信 号及时阻止偷盗。 如果确认车辆已经被盗, 监控中心能控制车辆 使其强行停车。
硬件和软件设计都给出了重点详细地分析。此系统是基于 !"# 技术利 用 -#" 和 -"5 研 究 汽 车 定 位 防 盗 系 统 , 实现了汽车导 航和防盗功能的结合。 参考文献
Hale Waihona Puke ( ,陈峰, 孙平, 赵义忠 [ 基于 -"5 短消息 的 -#" 车 辆 监 控 移 动 单 元 设 计 [ 电子工程师, (, ) ,**,
图, 主程序流程图
系统启动后首先要对相应的变量和模块进行初始化,初始 化采用子程序调用形式来完成可以增强程序的可读性。初始化 和主程序流程序图如图 , 所示。系统初始化主要包括以下几个 方面: 对 65"),*8,9* 的 初 始 化 如 : 时钟输出 () 7#: 工 作 方 式 、 方式、 中断系统初始化 (屏 蔽 中 断 ) 和 ; < = 口寄存器以及串口初 始化等; 定以及初始化变量如预置短消息, 设置位置数据结构等; ,) 各模块的初始化: 网络情 况 , 设置 )) 67)$6 如检查 ";5 卡、 短 消 息 格 式 扩 展 串 口 >,$( 如 设 置 工 作 方 式 和 波 特 率 ; -#" 模 块如设置协议方式工作频率; 开中断进入主程序; 9) 中断的应用。 $) 本系统中固有的和扩展的端口引起的中断分别属于可屏蔽 的内部硬件中断和外部硬件中断。高优先级的外部引脚中断和串 行通信 "7; 引发的接收中断触发 ;?6(:低优先级的外部引脚中 断和串行通信 "7; 引发的接收中断触发 ;?6$ 在本系统中,监测
-[!0\010’3\&+R ][-3\A^3Q31&+R 7[531\&+R ][#\0’2_3+R "[ "&A423+R N[6+313Q&B&+R;’20‘\32&’‘ -;"R -#" 3’B -"5 20./’AQA‘&0+ ^A\ 2/0 0^^0.2&@0 %3’3‘0%0’2 A^ 3%P4Q3’.0+R 7A%a420\+R O’@&b \A’%0’2 3’B :\P3’ "c+20%+[ C,**(D,$
[收稿日期: ,**$[W[,$ ]
地接收汽车位置信息的状态中,同时系统也在等待检测状态和 接受用户查询的消息中断。一旦有中断产生就会转移到相应的 中断子程序去处理。 若系统的设防信号无效, 则控制系统不进行 上述操作。 本系统以 &’( 为控制器,由 B(’ 模 块 、 B’C 无 线 通 信 模 块 以 及 必 要 的 辅 助 电 路 组 成 一 个 基 于 B(’ 、 B’C 的 具 有 汽 车
程序的设计采用混 合 语 言 编 程 , 这样可充分利用 7 语言和 汇编语言的各自的优点 (一方面提高程序的可读性, 另一方面节 约程序占用空间和提高执行速度) 。下面列出了 !"# 初始化的 子程序。
@A&B &’&2!"#CD E F;8G H *I8888J F7K7G( H *I**LL F7K7G* H *I**7) H 7#:7MK < ,R F"S"7G H *T9*>* FU!7G H *TO>J F"7;77G H *T**)VJ
!
系统的结构与功能 本系统以 &’( 为控制器,由 B(’ 模 块 、 B’C 无 线 通 信 模
块 以 及 必 要 的 辅 助 电 路 组 成 一 个 基 于 B(’ 、 B’C 的 具 有 汽 车 定位防盗功能的系统,其结构框图如图 $ 所示。在此系统中
&’( 对 于 B(’ 和 B’C 模 块 都 要 通 过 串 口 控 制 , B’C 模 块 与 &’( 本身的串口连接,利用 D!)$ 扩一串 口 供 B(’ 模 块 使 用 。 检 测 控 制 及 其 辅 助 电 路 都 可 以 直 接 使 用 &’( 的 E F G 口 。 此时, 只需要在控制 :C’H!"I!*" 的 E F G 端口都具有复用功能, 器寄存器中设置使 E F G 做通用的 E F G 用即可。 以 &’( 为控制器的系统在开机运行初始化后, 将处于不停
字符
< < 清除中断标志 < < 外部晶振 < < 7MK5N! H #MM O’3PQ0R "S"7MK < < 7MK=:6 H "S"7MK < < 不使能看门狗 不使能奇偶校验, < < ( 个停止位, >位
F"7;76M( H *T()J < < 使能接收和发送, "MOO# H * 禁 止 休眠方式, < < 禁止接收错误中断, 6TUNKO H* 即没有选定的发送特征 F"7;76M, H *T)J < < 使能接收和发送中断 F"7;MLN:! H *T**>( < < 波特率 H WX**L < "