Maximum entropy model learning of the translation rules
监督分类有哪些方法
监督分类有哪些方法监督分类是机器学习中的一种常见任务,主要是将输入的样本数据分为不同的预定义类别。
监督分类方法有很多种,可以根据算法的原理和特点进行分类。
以下是一些常用的监督分类方法:1. 逻辑回归(Logistic Regression):逻辑回归是一种线性分类算法,常用于二分类任务。
它基于一个S形函数,将输入特征与权重进行线性组合,并通过一个sigmoid函数将结果映射到[0, 1]的范围内,从而得到分类概率。
2. 决策树(Decision Tree):决策树通过对输入特征进行逐层划分,构建一个树状结构来进行分类。
它以特征的信息增益或基尼指数等作为准则来选择最佳的划分特征,从而在每个节点上进行分类决策。
3. 支持向量机(Support Vector Machines, SVM):SVM是一种二分类算法,基于统计学习理论和结构风险最小化准则。
SVM利用核函数在高维特征空间中将样本映射为线性可分的,并通过寻找最大间隔超平面来进行分类。
4. k最近邻(k-Nearest Neighbors, k-NN):k-NN是一种基于实例的分类算法,可以用于多分类任务。
它通过比较输入样本与训练样本之间的距离,并取最接近的k个邻居的标签来进行分类。
5. 朴素贝叶斯(Naive Bayes):朴素贝叶斯基于贝叶斯定理和特征条件独立性假设,将输入特征的联合概率分解为各个特征的条件概率。
它通过计算后验概率来进行分类,选择具有最大概率的类别。
6. 神经网络(Neural Networks):神经网络是一类模拟人脑神经元结构和工作机制的计算模型,在监督分类中常用于多分类任务。
它通过多层神经元处理输入特征,并通过反向传播算法来优化网络权重,从而实现分类。
7. 集成学习(Ensemble Learning):集成学习将多个分类模型组合成一个更强大的模型,以提高分类性能和鲁棒性。
常见的集成方法包括随机森林(Random Forest)和梯度提升树(Gradient Boosting Tree)。
最大熵模型简介
H ( p) p(x) log2 p(x)
x
p* arg max H ( p)
最大熵模型
❖ 例如: 给定一个词
假定已知存在四种词性:名词、动词、介词、指代词 ❖ 如果该词在语料库中出现过,并且属于名词的概率为70%,则判断
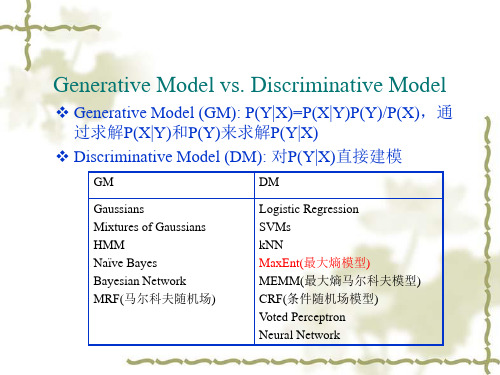
Generative Model vs. Discriminative Model
❖ Generative Model (GM): P(Y|X)=P(X|Y)P(Y)/P(X),通 过求解P(X|Y)和P(Y)来求解P(Y|X)
❖ Discriminative Model (DM): 对P(Y|X)直接建模
纲要
❖ 最大熵原理 ❖ 最大熵模型定义 ❖ 最大熵模型中的一些算法 ❖ 最大熵模型的应用 ❖ 总结 ❖ 思考题
最大熵模型(Maximum Entropy
Model)
❖
假设有一个样本集合 (x1, x2 ,... xn )
特征(j对f1, pf2的...制fk )约可以表示为
,我们给出k个特征 , Ep( f j ) E~p( f j )
p(X=3)=p(X=4)=p(X=5)=p(X=6)=0.1
最大熵原理
❖ 最大熵原理:1957 年由E.T.Jaynes 提出。 ❖ 主要思想:
在只掌握关于未知分布的部分知识时,应该选取符合这些知识但熵值最 大的概率分布。
❖ 原理的实质:
前提:已知部分知识 关于未知分布最合理的推断=符合已知知识最不确定或最随机的推断。 这是我们可以作出的唯一不偏不倚的选择,任何其它的选择都意味着我 们增加了其它的约束和假设,这些约束和假设根据我们掌握的信息无法 作出。
一文搞懂HMM(隐马尔可夫模型)

⼀⽂搞懂HMM(隐马尔可夫模型)什么是熵(Entropy)简单来说,熵是表⽰物质系统状态的⼀种度量,⽤它⽼表征系统的⽆序程度。
熵越⼤,系统越⽆序,意味着系统结构和运动的不确定和⽆规则;反之,,熵越⼩,系统越有序,意味着具有确定和有规则的运动状态。
熵的中⽂意思是热量被温度除的商。
负熵是物质系统有序化,组织化,复杂化状态的⼀种度量。
熵最早来原于物理学. 德国物理学家鲁道夫·克劳修斯⾸次提出熵的概念,⽤来表⽰任何⼀种能量在空间中分布的均匀程度,能量分布得越均匀,熵就越⼤。
1. ⼀滴墨⽔滴在清⽔中,部成了⼀杯淡蓝⾊溶液2. 热⽔晾在空⽓中,热量会传到空⽓中,最后使得温度⼀致更多的⼀些⽣活中的例⼦:1. 熵⼒的⼀个例⼦是⽿机线,我们将⽿机线整理好放进⼝袋,下次再拿出来已经乱了。
让⽿机线乱掉的看不见的“⼒”就是熵⼒,⽿机线喜欢变成更混乱。
2. 熵⼒另⼀个具体的例⼦是弹性⼒。
⼀根弹簧的⼒,就是熵⼒。
胡克定律其实也是⼀种熵⼒的表现。
3. 万有引⼒也是熵⼒的⼀种(热烈讨论的话题)。
4. 浑⽔澄清[1]于是从微观看,熵就表现了这个系统所处状态的不确定性程度。
⾹农,描述⼀个信息系统的时候就借⽤了熵的概念,这⾥熵表⽰的是这个信息系统的平均信息量(平均不确定程度)。
最⼤熵模型我们在投资时常常讲不要把所有的鸡蛋放在⼀个篮⼦⾥,这样可以降低风险。
在信息处理中,这个原理同样适⽤。
在数学上,这个原理称为最⼤熵原理(the maximum entropy principle)。
让我们看⼀个拼⾳转汉字的简单的例⼦。
假如输⼊的拼⾳是"wang-xiao-bo",利⽤语⾔模型,根据有限的上下⽂(⽐如前两个词),我们能给出两个最常见的名字“王⼩波”和“王晓波 ”。
⾄于要唯⼀确定是哪个名字就难了,即使利⽤较长的上下⽂也做不到。
当然,我们知道如果通篇⽂章是介绍⽂学的,作家王⼩波的可能性就较⼤;⽽在讨论两岸关系时,台湾学者王晓波的可能性会较⼤。
天津市鸟类多样性风险评价与分区管控
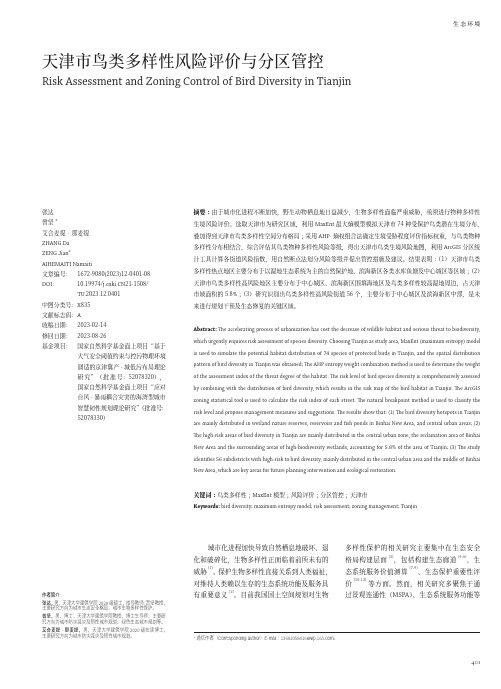
401生态环境摘要:由于城市化进程不断加快,野生动物栖息地日益减少,生物多样性面临严重威胁,亟须进行物种多样性生境风险评价。
选取天津市为研究区域,利用MaxEnt 最大熵模型模拟天津市74种受保护鸟类潜在生境分布,叠加得到天津市鸟类多样性空间分布格局;采用AHP-熵权组合法确定生境受胁程度评价指标权重,与鸟类物种多样性分布相结合,综合评估其鸟类物种多样性风险等级,得出天津市鸟类生境风险地图,利用ArcGIS 分区统计工具计算各街道风险指数,用自然断点法划分风险等级并提出管控措施及建议。
结果表明:(1)天津市鸟类多样性热点地区主要分布于以湿地生态系统为主的自然保护地、滨海新区各类水库鱼塘及中心城区等区域;(2)天津市鸟类多样性高风险地区主要分布于中心城区、滨海新区围填海地区及鸟类多样性较高湿地周边,占天津市域面积的5.8%;(3)研究识别出鸟类多样性高风险街道56个,主要分布于中心城区及滨海新区中部,是未来进行规划干预及生态修复的关键区域。
Abstract: The accelerating process of urbanization has cost the decrease of wildlife habitat and serious threat to biodiversity, which urgently requires risk assessment of species diversity. Choosing Tianjin as study area, MaxEnt (maximum entropy) model is used to simulate the potential habitat distribution of 74 species of protected birds in Tianjin, and the spatial distribution pattern of bird diversity in Tianjin was obtained; The AHP entropy weight combination method is used to determine the weight of the assessment index of the threat degree of the habitat. The risk level of bird species diversity is comprehensively assessed by combining with the distribution of bird diversity, which results in the risk map of the bird habitat in Tianjin. The ArcGIS zoning statistical tool is used to calculate the risk index of each street. The natural breakpoint method is used to classify the risk level and propose management measures and suggestions. The results show that: (1) The bird diversity hotspots in Tianjin are mainly distributed in wetland nature reserves, reservoirs and fish ponds in Binhai New Area, and central urban areas; (2) The high-risk areas of bird diversity in Tianjin are mainly distributed in the central urban zone, the reclamation area of Binhai New Area and the surrounding areas of high-biodiversity wetlands, accounting for 5.8% of the area of Tianjin; (3) The study identifies 56 subdistricts with high-risk to bird diversity, mainly distributed in the central urban area and the middle of Binhai New Area, which are key areas for future planning intervention and ecological restoration.关键词:鸟类多样性;MaxEnt 模型;风险评价;分区管控;天津市Keywords: bird diversity; maximum entropy model; risk assessment; zoning management; Tianjin张达曾坚*艾合麦提·那麦提ZHANG Da ZENG Jian*AIHEMAITI Namaiti文章编号: 1672-9080(2023)12-0401-08DOI : 10.19974/ 21-1508/TU.2023.12.0401中图分类号:X 835文献标志码:A收稿日期: 2023-02-14 修回日期: 2023-08-26基金项目: 国家自然科学基金面上项目“基于大气安全阈值约束与控污物理环境调适的京津冀产-城低污布局理论研究”(批准号:52078320),国家自然科学基金面上项目“应对台风-暴雨耦合灾害的海湾型城市智慧韧性规划理论研究”(批准号:52078330)作者简介张达,男,天津大学建筑学院2020级硕士,指导教师:曾坚教授,主要研究方向为城市生态安全格局、城市生物多样性保护。
自然语言处理及计算语言学相关术语中英对译表(M~Z)

machine dictionary 机器词典machine language 机器语⾔machine learning 机器学习machine translation 机器翻译machine-readable dictionary (MRD) 机读辞典Macrolinguistics 宏观语⾔学Markov chart 马可夫图Mathematical Linguistics 数理语⾔学maximum entropy 熵M-D (modifier-head) construction 偏正结构mean length of utterance (MLU) 语句平均长度measure of information 讯习测度 [信息测度] memory based 根据记忆的mental lexicon ⼼理词汇库mental model ⼼理模型mental process ⼼理过程 [智⼒过程;智⼒处理] metalanguage 超语⾔metaphor 隐喻metaphorical extension 隐喻扩展metarule 律上律 [元规则]metathesis 语⾳易位Microlinguistics 微观语⾔学middle structure 中间式结构minimal pair 最⼩对Minimalist Program 微⾔主义MLU (mean length of utterance) 语句平均长度modal 情态词modal auxiliary 情态助动词modal logic 情态逻辑modifier 修饰语Modular Logic Grammar 模组化逻辑语法modular parsing system 模组化句法剖析系统modularity 模组性(理论)module 模组monophthong 单元⾳monotonic 单调monotonicity 单调性Montague Grammar 蒙泰究语法 [蒙塔格语法] mood 语⽓morpheme 词素morphological affix 构词词缀morphological decomposition 语素分解morphological pattern 词型morphological processing 词素处理morphological rule 构词律 [词法规则] morphological segmentation 语素切分Morphology 构词学Morphophonemics 词⾳学 [形态⾳位学;语素⾳位学] morphophonological rule 形态⾳位规则Morphosyntax 词句法Motor Theory 肌动理论movement 移位MRD (machine-readable dictionary) 机读辞典MT (machine translation) 机器翻译multilingual processing system 多语讯息处理系统multilingual translation 多语翻译multimedia 多媒体multi-media communication 多媒体通讯multiple inheritance 多重继承multistate logic 多态逻辑mutation 语⾳转换mutual exclusion 互斥mutual information 相互讯息nativist position 语法天⽣假说natural language ⾃然语⾔natural language processing (NLP) ⾃然语⾔处理natural language understanding ⾃然语⾔理解negation 否定negative sentence 否定句neologism 新词语nested structure 套结构network 路neural network 类神经路Neurolinguistics 神经语⾔学neutralization 中⽴化n-gram n-连词n-gram modeling n-连词模型NLP (natural language processing) ⾃然语⾔处理node 节点nominalization 名物化nonce 暂⽤的non-finite ⾮限定non-finite clause ⾮限定式⼦句non-monotonic reasoning ⾮单调推理normal distribution 常态分布noun 名词noun phrase 名词组NP (noun phrase) completeness 名词组完全性object 宾语{语⾔学}/物件{资讯科学}object oriented programming 物件导向程式设计 [⾯向对向的程序设计] official language 官⽅语⾔one-place predicate ⼀元述语on-line dictionary 线上查询词典 [联机词点]onomatopoeia 拟声词onset 节⾸⾳ontogeny 个体发⽣Ontology 本体论open set 开放集operand 运算元 [操作对象]optimization 化 [化]overgeneralization 过度概化overgeneration 过度衍⽣paradigmatic relation 聚合关系paralanguage 附语⾔parallel construction 并列结构Parallel Corpus 平⾏语料库parallel distributed processing (PDP) 平⾏分布处理paraphrase 转述 [释意;意译;同意互训]parole ⾔语parser 剖析器 [句法剖析程序]parsing 剖析part of speech (POS) 词类particle 语助词PART-OF relation PART-OF 关系part-of-speech tagging 词类标注pattern recognition 型样识别P-C (predicate-complement) insertion 述补中插PDP (parallel distributed processing) 平⾏分布处理perception 知觉perceptron 感觉器 [感知器]perceptual strategy 感知策略performative ⾏为句periphrasis ⽤独⽴词表达perlocutionary 语效性的permutation 移位Petri Net Grammar Petri 语法philology 语⽂学phone 语⾳phoneme ⾳素phonemic analysis 因素分析phonemic stratum ⾳素层Phonetics 语⾳学phonogram ⾳标Phonology 声韵学 [⾳位学;⼴义语⾳学] Phonotactics ⾳位排列理论phrasal verb 词组动词 [短语动词]phrase 词组 [短语]phrase marker 词组标记 [短语标记]pitch ⾳调pitch contour 调形变化Pivot Grammar 枢轴语法pivotal construction 承轴结构plausibility function 可能性函数PM (phrase marker) 词组标记 [短语标记] polysemy 多义性POS-tagging 词类标记postposition ⽅位词PP (preposition phrase) attachment 介词依附Pragmatics 语⽤学Precedence Grammar 优先顺序语法precision 精确度predicate 述词predicate calculus 述词计算predicate logic 述词逻辑 [谓词逻辑]predicate-argument structure 述词论元结构prefix 前缀premodification 前置修饰preposition 介词Prescriptive Linguistics 规定语⾔学 [规范语⾔学] presentative sentence 引介句presupposition 前提Principle of Compositionality 语意合成性原理privative ⼆元对⽴的probabilistic parser 概率句法剖析程式problem solving 解决问题program 程式programming language 程式设计语⾔ [程序设计语⾔] proofreading system 校对系统proper name 专有名词prosody 节律prototype 原型pseudo-cleft sentence 准分裂句Psycholinguistics ⼼理语⾔学punctuation 标点符号pushdown automata 下推⾃动机pushdown transducer 下推转换器qualification 后置修饰quantification 量化quantifier 范域词Quantitative Linguistics 计量语⾔学question answering system 问答系统queue 伫列radical 字根 [词⼲;词根;部⾸;偏旁]radix of tuple 元组数基random access 随机存取rationalism 理性论rationalist (position) 理性论⽴场 [唯理论观点]reading laboratory 阅读实验室real time 即时real time control 即时控制 [实时控制]recursive transition network 递回转移路reduplication 重迭词 [重复]reference 指涉referent 指称对象referential indices 指标referring expression 指涉词 [指⽰短语]register 暂存器 [寄存器]{资讯科学}/调⾼{语⾳学}/语⾔的场合层级{社会语⾔学} regular language 正规语⾔ [正则语⾔]relational database 关联式资料库 [关系数据库]relative clause 关系⼦句relaxation method 松弛法relevance 相关性Restricted Logic Grammar 受限逻辑语法resumptive pronouns 复指代词retroactive inhibition 逆抑制rewriting rule 重写规则rheme 述位rhetorical structure 修辞结构rhetorics 修辞学robust 强健性robust processing 强健性处理robustness 强健性schema 基朴school grammar 教学语法scope 范域 [作⽤域;范围]script 脚本search mechanism 检索机制search space 检索空间searching route 检索路径 [搜索路径]second order predicate ⼆阶述词segmentation 分词segmentation marker 分段标志selectional restriction 选择限制semantic field 语意场semantic frame 语意架构semantic network 语意路semantic representation 语意表征 [语义表⽰]semantic representation language 语意表征语⾔semantic restriction 语意限制semantic structure 语意结构Semantics 语意学sememe 意素Semiotics 符号学sender 发送者sensorimotor stage 感觉运动期sensory information 感官讯息 [感觉信息]sentence 句⼦sentence generator 句⼦产⽣器 [句⼦⽣成程序]sentence pattern 句型separation of homonyms 同⾳词区分sequence 序列serial order learning 顺序学习serial verb construction 连动结构set oriented semantic network 集合导向型语意路 [⾯向集合型语意路] SGML (Standard Generalized Markup Language) 结构化通⽤标记语⾔shift-reduce parsing 替换简化式剖析short term memory 短程记忆sign 信号signal processing technology 信号处理技术simple word 单纯词situation 情境Situation Semantics 情境语意学situational type 情境类型social context 社会环境sociolinguistics 社会语⾔学software engineering 软体⼯程 [软件⼯程]sort 排序speaker-independent speech recognition ⾮特定语者语⾳识别spectrum 频谱speech ⼝语speech act assignment ⾔语⾏为指定speech continuum ⾔语连续体speech disorder 语⾔失序 [⾔语缺失]speech recognition 语⾳辨识speech retrieval 语⾳检索speech situation ⾔谈情境 [⾔语情境]speech synthesis 语⾳合成speech translation system 语⾳翻译系统speech understanding system 语⾳理解系统spreading activation model 扩散激发模型standard deviation 标准差Standard Generalized Markup Language 标准通⽤标⽰语⾔start-bound complement 接头词state of affairs algebra 事态代数state transition diagram 状态转移图statement kernel 句核static attribute list 静态属性表statistical analysis 统计分析Statistical Linguistics 统计语⾔学statistical significance 统计意义stem 词⼲stimulus-response theory 刺激反应理论stochastic approach to parsing 概率式句法剖析 [句法剖析的随机⽅法] stop 爆破⾳Stratificational Grammar 阶层语法 [层级语法]string 字串[串;字符串]string manipulation language 字串操作语⾔string matching 字串匹配 [字符串]structural ambiguity 结构歧义Structural Linguistics 结构语⾔学structural relation 结构关系structural transfer 结构转换structuralism 结构主义structure 结构structure sharing representation 结构共享表征subcategorization 次类划分 [下位范畴化]subjunctive 假设的sublanguage ⼦语⾔subordinate 从属关系subordinate clause 从属⼦句 [从句;⼦句]subordination 从属substitution rule 代换规则 [置换规则]substrate 底层语⾔suffix 后缀superordinate 上位的superstratum 上层语⾔suppletion 异型[不规则词型变化]suprasegmental 超⾳段的syllabification ⾳节划分syllable ⾳节syllable structure constraint ⾳节结构限制symbolization and verbalization 符号化与字句化synchronic 同步的synonym 同义词syntactic category 句法类别syntactic constituent 句法成分syntactic rule 语法规律 [句法规则] Syntactic Semantics 句法语意学syntagm 句段syntagmatic 组合关系 [结构段的;组合的] Syntax 句法Systemic Grammar 系统语法tag 标记target language ⽬的语⾔ [⽬标语⾔]task sharing 课题分享 [任务共享] tautology 套套逻辑 [恒真式;重⾔式;同义反复] taxonomical hierarchy 分类阶层 [分类层次] telescopic compound 套装合并template 模板temporal inference 循序推理 [时序推理] temporal logic 时间逻辑 [时序逻辑] temporal marker 时貌标记tense 时态terminology 术语text ⽂本text analyzing ⽂本分析text coherence ⽂本⼀致性text generation ⽂本⽣成 [篇章⽣成]Text Linguistics ⽂本语⾔学text planning ⽂本规划text proofreading ⽂本校对text retrieval ⽂本检索text structure ⽂本结构 [篇章结构]text summarization ⽂本⾃动摘要 [篇章摘要] text understanding ⽂本理解text-to-speech ⽂本转语⾳thematic role 题旨⾓⾊thematic structure 题旨结构theorem 定理thesaurus 同义词辞典theta role 题旨⾓⾊theta-grid 题旨格token 实类 [标记项]tone ⾳调tone language ⾳调语⾔tone sandhi 连调变换top-down 由上⽽下 [⾃顶向下]topic 主题topicalization 主题化 [话题化]trace 痕迹Trace Theory 痕迹理论training 训练transaction 异动 [处理单位]transcription 转写 [抄写;速记翻译]transducer 转换器transfer 转移transfer approach 转换⽅法transfer framework 转换框架transformation 变形 [转换]Transformational Grammar 变形语法 [转换语法] transitional state term set 转移状态项集合transitivity 及物性translation 翻译translation equivalence 翻译等值性translation memory 翻译记忆transparency 透明性tree 树状结构 [树]Tree Adjoining Grammar 树形加接语法 [树连接语法] treebank 树图资料库[语法关系树库]trigram 三连词t-score t-数turing machine 杜林机 [图灵机]turing test 杜林测试 [图灵试验]type 类型type/token node 标记类型/实类节点type-feature structure 类型特征结构typology 类型学ultimate constituent 终端成分unbounded dependency ⽆界限依存underlying form 基底型式underlying structure 基底结构unification 连并 [合⼀]Unification-based Grammar 连并为本的语法 [基于合⼀的语法] Universal Grammar 普遍性语法universal instantiation 普遍例式universal quantifier 全称范域词unknown word 未知词 [未定义词]unrestricted grammar ⾮限制型语法usage flag 使⽤旗标user interface 使⽤者界⾯ [⽤户界⾯]Valence Grammar 结合价语法Valence Theory 结合价理论valency 结合价variance 变异数 [⽅差]verb 动词verb phrase 动词组 [动词短语]verb resultative compound 动补复合词verbal association 词语联想verbal phrase 动词组verbal production ⾔语⽣成vernacular 本地话V-O construction (verb-object) 动宾结构vocabulary 字汇vocabulary entry 词条vocal track 声道vocative 呼格voice recognition 声⾳辨识 [语⾳识别]vowel 母⾳vowel harmony 母⾳和谐 [元⾳和谐]waveform 波形weak verb 弱化动词Whorfian hypothesis Whorfian 假说word 词word frequency 词频word frequency distribution 词频分布word order 词序word segmentation 分词word segmentation standard for Chinese 中⽂分词规范word segmentation unit 分词单位 [切词单位]word set 词集working memory ⼯作记忆 [⼯作存储区]world knowledge 世界知识writing system 书写系统X-Bar Theory X标杠理论 ["x"阶理论]Zipf's Law 利夫规律 [齐普夫定律]。
Maximum entropy modeling of species geographic distributions

Ecological Modelling 190(2006)231–259Maximum entropy modeling of species geographic distributionsSteven J.Phillips a ,∗,Robert P.Anderson b ,c ,Robert E.Schapire daAT&T Labs-Research,180Park Avenue,Florham Park,NJ 07932,USAbDepartment of Biology,City College of the City University of New York,J-526Marshak Science Building,Convent Avenue at 138th Street,New York,NY 10031,USAcDivision of Vertebrate Zoology (Mammalogy),American Museum of Natural History,Central Park West at 79th Street,New York,NY 10024,USAd Computer Science Department,Princeton University,35Olden Street,Princeton,NJ 08544,USAReceived 23February 2004;received in revised form 11March 2005;accepted 28March 2005Available online 14July 2005AbstractThe availability of detailed environmental data,together with inexpensive and powerful computers,has fueled a rapid increase in predictive modeling of species environmental requirements and geographic distributions.For some species,detailed pres-ence/absence occurrence data are available,allowing the use of a variety of standard statistical techniques.However,absence data are not available for most species.In this paper,we introduce the use of the maximum entropy method (Maxent)for modeling species geographic distributions with presence-only data.Maxent is a general-purpose machine learning method with a simple and precise mathematical formulation,and it has a number of aspects that make it well-suited for species distribution modeling.In order to investigate the efficacy of the method,here we perform a continental-scale case study using two Neotropical mammals:a lowland species of sloth,Bradypus variegatus ,and a small montane murid rodent,Microryzomys minutus .We compared Maxent predictions with those of a commonly used presence-only modeling method,the Genetic Algorithm for Rule-Set Prediction (GARP).We made predictions on 10random subsets of the occurrence records for both species,and then used the remaining localities for testing.Both algorithms provided reasonable estimates of the species’range,far superior to the shaded outline maps available in field guides.All models were significantly better than random in both binomial tests of omission and receiver operating characteristic (ROC)analyses.The area under the ROC curve (AUC)was almost always higher for Maxent,indicating better discrimination of suitable versus unsuitable areas for the species.The Maxent modeling approach can be used in its present form for many applications with presence-only datasets,and merits further research and development.©2005Elsevier B.V .All rights reserved.Keywords:Maximum entropy;Distribution;Modeling;Niche;RangeCorresponding author.Tel.:+19733608704;fax:+19733608871.E-mail addresses:phillips@(S.J.Phillips),anderson@ (R.P.Anderson),schapire@ (R.E.Schapire).1.IntroductionPredictive modeling of species geographic distribu-tions based on the environmental conditions of sites of known occurrence constitutes an important tech-0304-3800/$–see front matter ©2005Elsevier B.V .All rights reserved.doi:10.1016/j.ecolmodel.2005.03.026232S.J.Phillips et al./Ecological Modelling190(2006)231–259nique in analytical biology,with applications in con-servation and reserve planning,ecology,evolution, epidemiology,invasive-species management and other fields(Corsi et al.,1999;Peterson and Shaw,2003; Peterson et al.,1999;Scott et al.,2002;Welk et al.,2002;Yom-Tov and Kadmon,1998).Sometimes both presence and absence occurrence data are avail-able for the development of models,in which case general-purpose statistical methods can be used(for an overview of the variety of techniques currently in use, see Corsi et al.,2000;Elith,2002;Guisan and Zim-merman,2000;Scott et al.,2002).However,while vast stores of presence-only data exist(particularly in nat-ural history museums and herbaria),absence data are rarely available,especially for poorly sampled tropical regions where modeling potentially has the most value for conservation(Anderson et al.,2002;Ponder et al., 2001;Sober´o n,1999).In addition,even when absence data are available,they may be of questionable value in many situations(Anderson et al.,2003).Modeling techniques that require only presence data are therefore extremely valuable(Graham et al.,2004).1.1.Niche-based models from presence-only dataWe are interested in devising a model of a species’environmental requirements from a set of occurrence localities,together with a set of environmental vari-ables that describe some of the factors that likely influence the suitability of the environment for the species(Brown and Lomolino,1998;Root,1988). Each occurrence locality is simply a latitude–longitude pair denoting a site where the species has been ob-served;such georeferenced occurrence records often derive from specimens in natural history museums and herbaria(Ponder et al.,2001;Stockwell and Peterson, 2002a).The environmental variables in GIS format all pertain to the same geographic area,the study area, which has been partitioned into a grid of pixels.The task of a modeling method is to predict environmen-tal suitability for the species as a function of the given environmental variables.A niche-based model represents an approximation of a species’ecological niche in the examined envi-ronmental dimensions.A species’fundamental niche consists of the set of all conditions that allow for its long-term survival,whereas its realized niche is that subset of the fundamental niche that it actually occupies (Hutchinson,1957).The species’realized niche may be smaller than its fundamental niche,due to human influence,biotic interactions(e.g.,inter-specific com-petition,predation),or geographic barriers that have hindered dispersal and colonization;such factors may prevent the species from inhabiting(or even encoun-tering)conditions encompassing its full ecological po-tential(Pulliam,2000;Anderson and Mart´ınez-Meyer, 2004).We assume here that occurrence localities are drawn from source habitat,rather than sink habitat, which may contain a given species without having the conditions necessary to maintain the population with-out immigration;this assumption is less realistic with highly vagile taxa(Pulliam,2000).By definition,then, environmental conditions at the occurrence localities constitute samples from the realized niche.A niche-based model thus represents an approximation of the species’realized niche,in the study area and environ-mental dimensions being considered.If the realized niche and fundamental niche do not fully coincide,we cannot hope for any modeling al-gorithm to characterize the species’full fundamental niche:the necessary information is simply not present in the occurrence localities.This problem is likely ex-acerbated when occurrence records are drawn from too small a geographic area.In a larger study region,how-ever,spatial variation exists in community composi-tion(and,hence,in the resulting biotic interactions) as well as in the environmental conditions available to the species.Therefore,given sufficient sampling effort, modeling in a study region with a larger geographic extent is likely to increase the fraction of the funda-mental niche represented by the sample of occurrence localities(Peterson and Holt,2003),and is preferable. In practice,however,the departure between the fun-damental niche(a theoretical construct)and realized niche(which can be observed)of a species will remain unknown.Although a niche-based model describes suitabil-ity in ecological space,it is typically projected into geographic space,yielding a geographic area of pre-dicted presence for the species.Areas that satisfy the conditions of a species’fundamental niche represent its potential distribution,whereas the geographic ar-eas it actually inhabits constitute its realized distribu-tion.As mentioned above,the realized niche may be smaller than the fundamental niche(with respect to the environmental variables being modeled),in whichS.J.Phillips et al./Ecological Modelling190(2006)231–259233case the predicted distribution will be smaller than the full potential distribution.However,to the extent that the model accurately portrays the species’fundamen-tal niche,the projection of the model into geographic space will represent the species’potential distribution.Whether or not a model captures a species’full niche requirements,areas of predicted presence will typically be larger than the species’realized distribution.Due to many possible factors(such as geographic barriers to dispersal,biotic interactions,and human modifica-tion of the environment),few species occupy all areas that satisfy their niche requirements.If required by the application at hand,the species’realized distribution can often be estimated from the modeled distribution through a series of steps that remove areas that the species is known or inferred not to inhabit.For ex-ample,suitable areas that have not been colonized due to contingent historical factors(e.g.,geographic barri-ers)can be excluded(Peterson et al.,1999;Anderson, 2003).Similarly,suitable areas not inhabited due to bi-otic interactions(e.g.,competition with closely related morphologically similar species)can be identified and removed from the prediction(Anderson et al.,2002). Finally,when a species’present-day distribution is de-sired,such as for conservation purposes,a current land-cover classification derived from remotely sensed data can be used to exclude highly altered habitats(e.g.,re-moving deforested areas from the predicted distribution of an obligate-forest species;Anderson and Mart´ınez-Meyer,2004).There are implicit ecological assumptions in the set of environmental variables used for modeling, so selection of that set requires great care.Temporal correspondence should exist between occurrence localities and environmental variables;for example, a current land-cover classification should not be used with occurrence localities that derive from museum records collected over many decades(Anderson and Mart´ınez-Meyer,2004).Secondly,the variables should affect the species’distribution at the relevant scale, determined by the geographic extent and grain of the modeling task(Pearson et al.,2004).For example, using the terminology of Mackey and Lindenmayer (2001),climatic variables such as temperature and pre-cipitation are appropriate at global and meso-scales; topographic variables(e.g.,elevation and aspect)likely affect species distributions at meso-and topo-scales; and land-cover variables like percent canopy cover influence species distributions at the micro-scale.The choice of variables to use for modeling also affects the degree to which the model generalizes to regions outside the study area or to different environmental conditions(e.g.,other time periods).This is important for applications such as invasive-species management (e.g.,Peterson and Robins,2003)and predicting the impact of climate change(e.g.,Thomas et al.,2004). Bioclimatic and soil-type variables measure availabil-ity of the fundamental primary resources of light,heat, water and mineral nutrients(Mackey and Linden-mayer,2001).Their impact,as measured in one study area or time frame,should generalize to other situa-tions.On the other hand,variables representing latitude or elevation will not generalize well;although they are correlated with variables that have biophysical impact on the species,those correlations vary over space and time.A number of other serious potential pitfalls may af-fect the accuracy of presence-only modeling;some of these also apply to presence–absence modeling.First, occurrence localities may be biased.For example,they are often highly correlated with the nearby presence of roads,rivers or other access conduits(Reddy and D´a valos,2003).The location of occurrence localities may also exhibit spatial auto-correlation(e.g.,if a re-searcher collects specimens from several nearby local-ities in a restricted area).Similarly,sampling intensity and sampling methods often vary widely across the study area(Anderson,2003).In addition,errors may exist in the occurrence localities,be it due to transcrip-tion errors,lack of sufficient geographic detail(espe-cially in older records),or species misidentification. Frequently,the number of occurrence localities may be too low to estimate the parameters of the model re-liably(Stockwell and Peterson,2002b).Similarly,the set of available environmental variables may not be sufficient to describe all the parameters of the species’fundamental niche that are relevant to its distribution at the grain of the modeling task.Finally,errors may be present in the variables,perhaps due to errors in data manipulation,or due to inaccuracies in the climatic models used to generate climatic variables,or inter-polation of lower-resolution data.In sum,determining and possibly mitigating the effects of these factors rep-resent worthy topics of research for all presence-only modeling techniques.With these caveats,we proceed to introduce a modeling approach that may prove use-234S.J.Phillips et al./Ecological Modelling190(2006)231–259ful whenever the above concerns are adequately ad-dressed.1.2.MaxentMaxent is a general-purpose method for making predictions or inferences from incomplete information. Its origins lie in statistical mechanics(Jaynes,1957), and it remains an active area of research with an Annual Conference,Maximum Entropy and Bayesian Meth-ods,that explores applications in diverse areas such as astronomy,portfolio optimization,image recon-struction,statistical physics and signal processing.We introduce it here as a general approach for presence-only modeling of species distributions,suitable for all existing applications involving presence-only datasets. The idea of Maxent is to estimate a target probability distribution byfinding the probability distribution of maximum entropy(i.e.,that is most spread out,or closest to uniform),subject to a set of constraints that represent our incomplete information about the target distribution.The information available about the target distribution often presents itself as a set of real-valued variables,called“features”,and the constraints are that the expected value of each feature should match its em-pirical average(average value for a set of sample points taken from the target distribution).When Maxent is ap-plied to presence-only species distribution modeling, the pixels of the study area make up the space on which the Maxent probability distribution is defined,pixels with known species occurrence records constitute the sample points,and the features are climatic variables, elevation,soil category,vegetation type or other environmental variables,and functions thereof.Maxent offers many advantages,and a few draw-backs;a comparison with other modeling methods will be made in Section2.1.4after the Maxent approach is described in detail.The advantages include the fol-lowing:(1)It requires only presence data,together with environmental information for the whole study area.(2)It can utilize both continuous and categorical data,and can incorporate interactions between different variables.(3)Efficient deterministic algorithms have been developed that are guaranteed to converge to the optimal(maximum entropy)probability distribution.(4)The Maxent probability distribution has a concise mathematical definition,and is therefore amenable to analysis.For example,as with generalized linear and generalized additive models(GLM and GAM),in the absence of interactions between variables,additivity of the model makes it possible to interpret how each environmental variable relates to suitability(Dud´ık et al.,2004;Phillips et al.,2004).(5)Over-fitting can be avoided by using 1-regularization(Section2.1.2).(6) Because dependence of the Maxent probability distri-bution on the distribution of occurrence localities is ex-plicit,there is the potential(in future work)to address the issue of sampling bias formally,as in Zadrozny (2004).(7)The output is continuous,allowingfine dis-tinctions to be made between the modeled suitability of different areas.If binary predictions are desired,this allows greatflexibility in the choice of threshold.If the application is conservation planning,thefine distinc-tions in predicted relative environmental suitability can be valuable to reserve planning algorithms.(8)Maxent could also be applied to species presence/absence data by using a conditional model(as in Berger et al.,1996), as opposed to the unconditional model used here.(9) Maxent is a generative approach,rather than discrim-inative,which can be an inherent advantage when the amount of training data is limited(see Section2.1.4).(10)Maximum entropy modeling is an active area of re-search in statistics and machine learning,and progress in thefield as a whole can be readily applied here.(11) As a general-purpose andflexible statistical method, we expect that it can be used for all the applications outlined in Section1above,and at all scales.Some drawbacks of the method are:(1)It is not as mature a statistical method as GLM or GAM,so there are fewer guidelines for its use in general,and fewer methods for estimating the amount of error in a predic-tion.Our use of an“unconditional”model(cf.advan-tage8)is rare in machine learning.(2)The amount of regularization(see Section2.1.2)requires further study (e.g.,see Phillips et al.,2004),as does its effectiveness in avoiding over-fitting compared with other variable-selection methods(for alternatives,see Guisan et al., 2002).(3)It uses an exponential model for probabil-ities,which is not inherently bounded above and can give very large predicted values for environmental con-ditions outside the range present in the study area.Extra care is therefore needed when extrapolating to another study area or to future or past climatic conditions(for example,feature values outside the range of values in the study area should be“clamped”,or reset to the ap-propriate upper or lower bound).(4)Special-purposeS.J.Phillips et al./Ecological Modelling190(2006)231–259235software is required,as Maxent is not available in stan-dard statistical packages.1.3.Existing approaches for presence-only modelingMany methods have been used for presence-only modeling of species distributions,and we only attempt here to give a broad overview of existing methods. Some methods use only presences to derive a model. BIOCLIM(Busby,1986;Nix,1986)predicts suitable conditions in a“bioclimatic envelope”,consisting of a rectilinear region in environmental space represent-ing the range(or some percentage thereof)of observed presence values in each environmental dimension.Sim-ilarly,DOMAIN(Carpenter et al.,1993)uses a similar-ity metric,where a predicted suitability index is given by computing the minimum distance in environmental space to any presence record.Other techniques use presence and background data.General-purpose statistical methods such as generalized linear models(GLMs)and generalized additive models(GAMs)are commonly used for modeling with presence–absence datasets.Recently, they have been applied to presence-only situations by taking a random sample of pixels from the study area, known as“background pixels”or“pseudo-absences”, and using them in place of absences during model-ing(Ferrier and Watson,1996;Ferrier et al.,2002).A sample of the background pixels can be chosen purely at random(sometimes excluding sites with presence records,Graham et al.,2004),or from sites where sampling is known to have occurred or from a model of such sites(Zaniewski et al.,2002;Engler et al.,2004).Similarly,a Bayesian approach(Aspinall, 1992)proposed modeling presence versus a random sample.The Genetic Algorithm for Rule-Set Predic-tion(Stockwell and Noble,1992;Stockwell and Peters, 1999)uses an artificial-intelligence framework called genetic algorithms.It produces a set of positive and negative rules that together give a binary prediction; rules are favored in the algorithm according to their significance(compared with random prediction)based on a sample of background pixels and presence pixels. Environmental-Niche Factor Analysis(ENFA,Hirzel et al.,2002)uses presence localities together with environmental data for the entire study area,without requiring a sample of the background to be treated like absences.It is similar to principal components analysis, involving a linear transformation of the environmental space into orthogonal“marginality”and“specializa-tion”factors.Environmental suitability is then modeled as a Manhattan distance in the transformed space.As afirst step in the evaluation of Maxent,we chose to compare it with GARP,as the latter has recently seen extensive use in presence-only studies(Anderson, 2003;Joseph and Stockwell,2002;Peterson and Kluza, 2003;Peterson and Robins,2003;Peterson and Shaw, 2003and references therein).While further stud-ies are needed comparing Maxent with other widely used methods that have been applied to presence-only datasets,such studies are beyond the scope of this pa-per.2.Methods2.1.Maxent details2.1.1.The principleWhen approximating an unknown probability dis-tribution,the question arises,what is the best approx-imation?E.T.Jaynes gave a general answer to this question:the best approach is to ensure that the ap-proximation satisfies any constraints on the unknown distribution that we are aware of,and that subject to those constraints,the distribution should have max-imum entropy(Jaynes,1957).This is known as the maximum-entropy principle.For our purposes,the un-known probability distribution,which we denoteπ,is over afinite set X,(which we will later interpret as the set of pixels in the study area).We refer to the individ-ual elements of X as points.The distributionπassigns a non-negative probabilityπ(x)to each point x,and these probabilities sum to1.Our approximation ofπis also a probability distribution,and we denote itˆπ.The entropy ofˆπis defined asH(ˆπ)=−x∈Xˆπ(x)lnˆπ(x)where ln is the natural logarithm.The entropy is non-negative and is at most the natural log of the number of elements in X.Entropy is a fundamental concept in information theory:in the paper that originated that field,Shannon(1948)described entropy as“a measure236S.J.Phillips et al./Ecological Modelling 190(2006)231–259of how much ‘choice’is involved in the selection of an event”.Thus a distribution with higher entropy involves more choices (i.e.,it is less constrained).Therefore,the maximum entropy principle can be interpreted as saying that no unfounded constraints should be placed on ˆπ,or alternatively,The fact that a certain probability distribution maxi-mizes entropy subject to certain constraints represent-ing our incomplete information,is the fundamental property which justifies use of that distribution for inference;it agrees with everything that is known,but carefully avoids assuming anything that is not known (Jaynes,1990).2.1.2.A machine learning perspectiveThe maximum entropy principle has seen recent interest in the machine learning community,with a major contribution being the development of effi-cient algorithms for finding the Maxent distribution (see Berger et al.,1996for an accessible introduction and Ratnaparkhi,1998for a variety of applications and a favorable comparison with decision trees).The ap-proach consists of formalizing the constraints on the unknown probability distribution πin the following way.We assume that we have a set of known real-valued functions f 1,...,f n on X ,known as “features”(which for our application will be environmental vari-ables or functions thereof).We assume further that the information we know about πis characterized by the expectations (averages)of the features under π.Here,each feature f j assigns a real value f j (x )to each point x in X .The expectation of the feature f j under πis defined asx ∈X π(x )f j (x )and denoted by π[f j ].In general,for any probability distribution p and function f ,we use the notation p [f ]to denote the expectation of f under p .The feature expectations π[f j ]can be approximated using a set of sample points x 1,...,x m drawn inde-pendently from X (with replacement)according to the probability distribution π.The empirical average of f j is 1m mi =1f j (x i ),which we can write as ˜π[f j ](where ˜πis the uniform distribution on the sample points),and use as an estimate of π[f j ].By the maximum entropy principle,therefore,we seek the probability distribu-tion ˆπof maximum entropy subject to the constraint that each feature f j has the same mean under ˆπas ob-served empirically,i.e.ˆπ[f j ]=˜π[f j ],for each feature f j(1)It turns out that the mathematical theory of convexduality can be used (Della Pietra et al.,1997)to showthat this characterization uniquely determines ˆπ,and that ˆπhas an alternative characterization,which can be described as follows.Consider all probability distribu-tions of the form q λ(x )=e λ·f (x )Z λ(2)where λis a vector of n real-valued coefficients or fea-ture weights,f denotes the vector of all n features,and Z λis a normalizing constant that ensures that q λsums to 1.Such distributions are known as Gibbs distribu-tions.Convex duality shows that the Maxent probabil-ity distribution ˆπis exactly equal to the Gibbs prob-ability distribution q λthat maximizes the likelihood (i.e.,probability)of the m sample points.Equivalently,it minimizes the negative log likelihood of the sample points ˜π[−ln(q λ)](3)which can also be written ln Z λ−1m m i =1λ·f (x i )and termed the “log loss”.As described so far,Maxent can be prone to over-fitting the training data.The problem derives from the fact that the empirical feature means will typically not equal the true means;they will only approximate them.Therefore the means under ˆπshould only be restricted to be close to their empirical values.One way this can be done is to relax the constraint in (1)above (Dud´ık et al.,2004),replacing it with|ˆπ[f j ]−˜π[f j ]|≤βj ,for each feature f j (4)for some constants βj .This also changes the dual char-acterization,resulting in a form of 1-regularization:the Maxent distribution can now be shown to be the Gibbs distribution that minimizes˜π[−ln(q λ)]+jβj |λj |(5)where the first term is the log loss (as in (3)above),while the second term penalizes the use of large values for the weights λj .Regularization forces Max-ent to focus on the most important features,and 1-S.J.Phillips et al./Ecological Modelling190(2006)231–259237regularization tends to produce models with few non-zeroλj values(Williams,1995).Such models are less likely to overfit,because they have fewer parameters; as a general rule,the simplest explanation of a phe-nomenon is usually best(the principle of parsimony, Occam’s Razor).Note that 1regularization has also been applied to GLM/GAMs,and is called the“lasso”in that context(Guisan et al.,2002and references therein).This maximum likelihood formulation suggests a natural approach forfinding the Maxent probability distribution:start from the uniform probability distri-bution,for whichλ=(0,...,0),then repeatedly make adjustments to one or more of the weightsλj in such a way that the regularized log loss decreases.Regular-ized log loss can be shown to be a convex function of the weights,so no local minima exist,and several convex optimization methods exist for adjusting the weights in a way that guarantees convergence to the global min-imum(see Section2.2for the algorithm used in this study).The above presentation describes an“uncondi-tional”maximum entropy model.“Conditional”mod-els are much more common in the machine learning literature.The task of a conditional Maxent model is to approximate a joint probability distribution p(x,y) of the inputs x and output label y.Both presence and absence data would be required to train a conditional model of a species’distribution,which is why we use unconditional models.2.1.3.Application to species distribution modelingAustin(2002)examines three components needed for statistical modeling of species distributions:an eco-logical model concerning the ecological theory being used,a data model concerning collection of the data, and a statistical model concerning the statistical the-ory.Maxent is a statistical model,and to apply it to model species distributions successfully,we must con-sider how it relates to the two other modeling com-ponents(the data model and ecological model).Using the notation of Section2.1.2,we define the set X to be the set of pixels in the study area,and interpret the recorded presence localities for the species as sample points x1,...,x m taken from an unknown probability distributionπ.The data model consists of the method by which the presence localities were collected.One idealized sampling strategy is to pick a random pixel,and record1if the species is present there,and0other-wise.If we denote the response variable as y,then under this sampling strategy,πis the probability distribution p(x|y=1).By applying Bayes’rule,we get thatπis proportional to probability of occurrence,p(y=1|x), although with presence-only data we cannot determine the constant of proportionality.However,most presence-only datasets derive from surveys where the data model is much less well-defined that the idealized model presented above.The various sampling biases described in Section1seriously violate this data model.In practice,then,π(andˆπ)can be more conservatively interpreted as a relative index of envi-ronmental suitability,where higher values represent a prediction of better conditions for the species(similar to the relaxed interpretation of GLMs with presence-only data in Ferrier et al.(2002)).The critical step in formulating the ecological model is defining a suitable set of features.Indeed,the con-straints imposed by the features represent our ecologi-cal assumptions,as we are asserting that they represent all the environmental factors that constrain the geo-graphical distribution of the species.We considerfive feature types,described in Dud´ık et al.(2004).We did not use the fourth in our present study,as it may require more data than were available for our study species.1.A continuous variable f is itself a“linear feature”.It imposes the constraint onˆπthat the mean of the environmental variable,ˆπ[f],should be close to its observed value,i.e.,its mean on the sample locali-ties.2.The square of a continuous variable f is a“quadraticfeature”.When used with the corresponding linear feature,it imposes the constraint onˆπthat the vari-ance of the environmental variable should be close to its observed value,since the variance is equal to ˆπ[f2]−ˆπ[f]2.It models the species’tolerance for variation from its optimal conditions.3.The product of two continuous environmental vari-ables f and g is a“product feature”.Together with the linear features for f and g,it imposes the constraint that the covariance of those two variables should be close to its observed value,since the covariance isˆπ[fg]−ˆπ[f]ˆπ[g].Product features therefore in-corporate interactions between predictor variables.4.For a continuous environmental variable f,a“thresh-old feature”is equal to1when f is above a given。
最大熵马尔可夫模型

最大熵马尔可夫模型介绍最大熵马尔可夫模型(Maximum Entropy Markov Model,简称MEMM)是一种常用于序列标注的统计模型。
它结合了最大熵模型和马尔可夫随机场模型的特点,旨在解决序列标注问题中的上下文相关性和特征选择的挑战。
本文将深入讨论MEMM的原理、应用场景、训练方法以及一些扩展和改进的方法。
原理最大熵模型最大熵模型是一种用于分类和回归问题的概率模型,它通过最大化经验分布的熵来选择最合适的模型。
最大熵模型的基本思想是,在给定一些约束条件下选择概率分布的最大熵模型。
最大熵模型的参数估计可以通过最大熵准则来进行。
马尔可夫随机场模型马尔可夫随机场模型是一种用于建模随机现象的图模型。
它通过图中的节点表示随机变量,边表示节点之间的依赖关系,通过定义一组概率分布来描述整个系统。
马尔可夫随机场模型的参数估计可以通过最大似然估计等方法进行。
最大熵马尔可夫模型最大熵马尔可夫模型是将最大熵模型和马尔可夫随机场模型相结合的一种序列标注模型。
它在标注序列的每个位置上,使用最大熵模型来选择最合适的标记,并且考虑了上下文的依赖关系。
最大熵马尔可夫模型的参数估计可以通过条件随机场的方法进行。
应用场景最大熵马尔可夫模型在自然语言处理领域有着广泛的应用。
例如,命名实体识别、词性标注、语义角色标注等任务都可以使用MEMM来解决。
这是因为MEMM可以有效地利用上下文信息,提高序列标注的准确性。
训练方法最大熵马尔可夫模型的训练通常涉及以下几个步骤:1.数据准备:收集和标注训练数据,将数据转化为特征表示。
2.特征提取:从训练数据中提取特征,这些特征可以包括词性、上下文信息等。
3.特征权重估计:使用最大熵准则估计特征的权重,通常使用迭代算法如改进的迭代尺度法。
4.模型训练:通过训练算法根据标注数据调整模型参数,比如拟牛顿法、梯度下降等。
5.模型评估:使用验证数据来评估模型的性能,可以使用准确率、精确率、召回率等指标。
最大熵模型核心原理
最大熵模型核心原理一、引言最大熵模型(Maximum Entropy Model, MEM)是一种常用的统计模型,它在自然语言处理、信息检索、图像识别等领域有广泛应用。
本文将介绍最大熵模型的核心原理。
二、信息熵信息熵(Entropy)是信息论中的一个重要概念,它可以衡量某个事件或信源的不确定度。
假设某个事件有n种可能的结果,每种结果发生的概率分别为p1,p2,...,pn,则该事件的信息熵定义为:H = -∑pi log pi其中,log表示以2为底的对数。
三、最大熵原理最大熵原理(Maximum Entropy Principle)是指在所有满足已知条件下,选择概率分布时应选择具有最大信息熵的分布。
这个原理可以理解为“保持不确定性最大”的原则。
四、最大熵模型最大熵模型是基于最大熵原理建立起来的一种分类模型。
它与逻辑回归、朴素贝叶斯等分类模型相似,但在某些情况下具有更好的性能。
五、特征函数在最大熵模型中,我们需要定义一些特征函数(Function),用来描述输入样本和输出标签之间的关系。
特征函数可以是任意的函数,只要它能够从输入样本中提取出有用的信息,并与输出标签相关联即可。
六、特征期望对于一个特征函数f(x,y),我们可以定义一个特征期望(Expected Feature),表示在所有可能的输入样本x和输出标签y的组合中,该特征函数在(x,y)处的期望值。
特别地,如果该特征函数在(x,y)处成立,则期望值为1;否则为0。
七、约束条件最大熵模型需要满足一些约束条件(Constraints),以保证模型能够准确地描述训练数据。
通常我们会选择一些简单明了的约束条件,比如每个输出标签y的概率之和等于1。
八、最大熵优化问题最大熵模型可以被看作是一个最优化问题(Optimization Problem),即在满足约束条件下,寻找具有最大信息熵的概率分布。
这个问题可以使用拉格朗日乘子法(Lagrange Multiplier Method)来求解。
soft actor-critic 简明理解

soft actor-critic 简明理解Soft Actor-Critic: A Concise UnderstandingIntroductionIn the field of reinforcement learning, Soft Actor-Critic (SAC) is an algorithm that has gained significant attention due to its ability to successfully handle both discrete and continuous action spaces. SAC utilizes the actor-critic architecture to simultaneously learn a policy and a value function. This concise article aims to provide a step-by-step explanation of the SAC algorithm, its key components, and its advantages over other reinforcement learning techniques.Step 1: Understanding the Actor-Critic ArchitectureBefore delving into SAC, it is important to grasp the fundamentals of the actor-critic architecture. In reinforcement learning, the actor refers to the policy or the set of actions taken by the agent, while the critic estimates the expected return or value function given a specific state and action. By combining these two components, the actor-critic architecture enables the agent to learn both the optimal policy and value function simultaneously.Step 2: Exploring the Key Components of SAC2.1 Soft ExplorationOne of the key aspects that differentiates SAC from otheractor-critic algorithms is its emphasis on soft exploration. Traditional approaches like deep Q-networks (DQN) often rely on epsilon-greedy exploration, which can be too deterministic. In SAC, soft exploration is achieved by introducing an entropy regularization term that encourages the policy to explore more diverse actions, leading to better exploration and faster learning.2.2 Maximum Entropy Reinforcement LearningAnother crucial component of SAC is maximum entropy reinforcement learning. Instead of focusing solely on maximizing the expected return, SAC also strives to maximize the entropy or randomness of the agent's policy. By doing so, the agent becomes more adaptable and robust, as it learns to explore a wide range of actions and avoids overcommitting to a single action.2.3 Off-Policy LearningSAC adopts an off-policy learning approach, meaning that the agent learns from a different policy than the one used for decision-making. This property allows for efficient use of the collected data, as the agent does not need to update its policy after each interaction. By decoupling the exploration and exploitation phases, SAC is capable of achieving higher sample efficiency and overcoming the exploration-exploitation dilemma.Step 3: SAC Algorithm Workflow3.1 Data CollectionThe SAC algorithm starts with data collection, where the agent interacts with the environment based on its current policy and stores the observed state, action, reward, and next state information. Unlike other algorithms, SAC also records the logarithm of the probability of a certain action, which is essential for entropy maximization.3.2 Updating the Q-NetworkAfter collecting a sufficient amount of data, the critic or Q-network is updated by minimizing the Mean Squared Bellman Error (MSBE). This step involves adjusting the parameters of the value function estimator to better approximate the expected return given a state and action.3.3 Actor and Entropy UpdatesSimultaneously, the actor network is updated using policy gradient techniques like the Trust Region Policy Optimization (TRPO) or Proximal Policy Optimization (PPO). The objective is to maximize the expected return while also maximizing the entropy of the policy.3.4 Target Networks and Soft UpdatesTo stabilize the learning process, SAC employs target networks, which are delayed copies of the actor and critic networks. These target networks are updated periodically in a soft manner by interpolating their weights with the online networks' weights. Soft updates ensure a smoother transition and reduce the risk ofinstability during the learning process.Step 4: Advantages of Soft Actor-CriticSAC has several notable advantages compared to other reinforcement learning techniques:4.1 Handling Continuous Action SpacesSAC is particularly effective in environments with continuous action spaces due to its ability to provide probabilistic policies rather than individual deterministic actions. This allows for more flexible and nuanced decision-making.4.2 High Sample EfficiencySince SAC utilizes off-policy learning and soft exploration, it achieves higher sample efficiency, meaning that it can learn from fewer interactions with the environment. This advantage is especially crucial when working with real-world systems where data collection is often resource-intensive or costly.4.3 Robustness and AdaptabilityBy combining maximum entropy reinforcement learning and soft exploration, SAC learns policies that are both robust and adaptable. The agent becomes less prone to overcommitting to a single action and can effectively explore a wide range of actions, making it suitable for complex and dynamic environments.ConclusionSoft Actor-Critic is a powerful algorithm in the field of reinforcement learning that leverages the actor-critic architecture, soft exploration, and maximum entropy reinforcement learning. It stands out due to its ability to handle both discrete and continuous action spaces, high sample efficiency, and robustness in complex environments. As research in reinforcement learning progresses, SAC continues to be a promising avenue for developing more advanced and intelligent agents.。
L M S A l g o r i t h m 最 小 均 方 算 法 ( 2 0 2 0 )
常用的机器学习&数据挖掘知识点[转]常用的数【导师实战追-女生资-源】据挖掘机器学习知识(点)Basis(基础):MSE(【扣扣】MeanSquare Error 均方误差),LMS(Least MeanSquare 最小均方)【⒈】,LSM(Least Square Methods 最小二乘法),MLE(Maximum Like 【0】lihoodEstimation最大似然估计),QP(QuadraticProgramming 二次规划【1】), CP(ConditionalProbability条件概率),JP(Joint Pro 【б】bability 联合概率),MP(Marginal Probability边缘概率),Bay 【9】esian Formula(贝叶斯公式),L1 -L2Regularization(L1-L2正则,以及更【5】多的,现在比较火的L2.5正则等),GD(Gradient Descent 梯度下降【2】),SGD(Stochastic GradientDescent 随机梯度下降),Eig 【6】envalue(特征值),Eigenvector(特征向量),QR-decomposition(QR 分解),Quantile (分位数),Covariance(协方差矩阵)。
Common Distribution(常见分布):Discrete Distribution(离散型分布):Bernoulli Distribution-Binomial(贝努利分步-二项分布),Negative BinomialDistribution(负二项分布),Multinomial Distribution(多式分布),Geometric Distribution(几何分布),Hypergeometric Distribution(超几何分布),Poisson Distribution (泊松分布) ContinuousDistribution (连续型分布):Uniform Distribution(均匀分布),Normal Distribution-GaussianDistribution(正态分布-高斯分布),Exponential Distribution(指数分布),Lognormal Distribution(对数正态分布),Gamma Distribution(Gamma分布),Beta Distribution(Beta分布),Dirichlet Distribution(狄利克雷分布),Rayleigh Distribution(瑞利分布),Cauchy Distribution(柯西分布),Weibull Distribution (韦伯分布)Three Sampling Distribution(三大抽样分布):Chi-square Distribution(卡方分布),t-distribution(t-distribution),F-distribution(F-分布)Data Pre-processing(数据预处理):MissingValue Imputation(缺失值填充),Discretization(离散化),Mapping(映射),Normalization(归一化-标准化)。
sac算法复现

SAC(Soft Actor-Critic)算法是一种强化学习算法,旨在解决采样效率和策略稳定性问题。
它整合了Actor-Critic、Off-Policy、Maximum Entropy Model三大框架,极大程度的解决了传统强化学习算法的缺陷。
SAC算法的主要特点包括:1.在策略目标中加入了熵项,以期在策略收益最大化的同时使其本身的熵最大,使策略网络具有良好的探索性,避免陷入局部最优。
通过引入熵正则化项,传统Reinforcement Learning变为Maximum Entropy Reinforcement Learning(MERL)。
2.在策略选择中,SAC采用了基于能量的模型(EnergyBased Policy,EBP),相比于传统强化学习中的确定性策略模型,EBP中,action值的概率分布贴合Q函数的分布,避免了传统RL中action过于单一的缺陷。
SAC算法的复现过程需要实现以下步骤:1.定义策略网络(Actor)和价值函数(Critic),并初始化它们。
2.定义探索策略,通常采用高斯噪声或Ornstein-Uhlenbeck过程。
3.定义奖励函数,根据具体任务来确定。
4.定义学习率和衰减率,以及其他超参数。
5.开始训练循环,迭代更新策略网络和价值函数。
6.在每次迭代中,根据当前策略和环境状态进行采样,并计算奖励。
7.使用奖励和Q函数更新价值函数。
8.使用策略网络和当前状态更新策略。
9.更新超参数和学习率。
10.重复步骤6-9直到收敛或达到最大迭代次数。
需要注意的是,SAC算法的实现过程需要深入理解强化学习原理和相关数学知识,同时需要仔细调整超参数和网络结构以获得最佳性能。
如果您需要更多关于SAC算法的详细信息,可以查阅相关论文和开源代码库。
最大熵模型简介-Read

FI 算法(特征引入算法,Feature Induction) 解决如何选择特征的问题:通常采用一个逐步增加特征的办
法进行,每一次要增加哪个特征取决于样本数据。
Algorithms
Generalized Iterative Scaling (GIS): (Darroch and Ratcliff, 1972) Improved Iterative Scaling (IIS): (Della Pietra et al., 1995)
( n) j
Z
Approximation for calculating feature expectation
E p f j p( x) f j ( x)
x a A,bB
p ( a, b) f
j
j
( a, b)
a A,bB
p(b) p(a | b) f
p (b) p(a | b) f ~
GIS: setup
Requirements for running GIS: Obey form of model and constraints: k
j f j ( x)
p ( x)
e
j 1
An additional constraint:
Z
Ep f j d j
x
最大熵原理
最大熵原理:1957 年由E.T.Jaynes 提出。 主要思想:
在只掌握关于未知分布的部分知识时,应该选取符合这些知识但熵 值最大的概率分布。
原理的实质:
前提:已知部分知识 关于未知分布最合理的推断=符合已知知识最不确定或最随机的推 断。 这是我们可以作出的唯一不偏不倚的选择,任何其它的选择都意味 着我们增加了其它的约束和假设,这些约束和假设根据我们掌握的 信息无法作出。
基于现代智能识别技术的英语机器翻译模型

由于全球化的高速发展,不同国家间的信息流动呈 现高速性,英语成为当前国际间沟通的主要语言。当前 智能识别技术在不同领域中的应用价值不断提升,基于 现代智能识别技术的英语机器翻译模型,能够提高英语 机器翻译效率和准确度,实现无障碍交流 。 [1⁃2] 而传统基 于句法分析的英语机器翻译方法,无法解决智能识别技 术中的海量英语语言中的部分结构歧义问题,存在机器 翻译准确度低的问题。因此,本文设计基于现代智能识 别 技 术 的 英 语 机 器 翻 译 模 型 ,通 过 直 接 最 大 熵 模 型 ,获
体中文句子以及机器翻译对在句子中的次数。采用基于最大熵的统计机器翻译方法,通过直接最大熵模型训练得到相关参
数,获取不同英语语言特征间的最佳组合方式,解决海量英语语言中的部分结构歧义问题,提高英语机器翻译的准确度。实
验结果表明,所设计的英语机器翻译模型,具有较高的翻译准确度和稳定性。
关键词:智能识别技术;英语翻译;机器翻译模型;结构歧义;最大熵;翻译准确度
取复杂英语句子中不同特征间的最佳组合方式,消除部 分结构歧义,提高英语机器翻译的准确度 。 [3⁃4]
中图分类号:TN915⁃34;H1004⁃373X(2018)16⁃0151⁃04
English machine translation model based on modern intelligent recognition technology
soft actor-critic 的解释 -回复
soft actor-critic 的解释-回复Soft Actor-Critic (SAC) is a reinforcement learning algorithm that combines the actor-critic framework with maximum entropy reinforcement learning. It is designed to learn policies for continuous action spaces, facilitating robust and flexible control in complex environments. In this article, we will step by step explore the key principles and components of the SAC algorithm.1. Introduction to Reinforcement Learning:Reinforcement learning is a branch of machine learning that focuses on enabling an agent to learn how to make decisions based on its interaction with an environment. The agent receives feedback in the form of rewards or penalties and learns to maximize the cumulative reward over time through trial and error.2. Actor-Critic Framework:The actor-critic framework is a popular approach in reinforcement learning. It combines the advantages of both value-based and policy-based methods. The actor, also known as the policy network, learns to select actions based on the current state of the environment. The critic, on the other hand, estimates the value function or the state-action value function, providing feedback tothe actor's policy learning process.3. Continuous Action Spaces:Many real-world problems, such as robotics control or autonomous driving, involve continuous action spaces. In contrast to discrete action spaces where there are a finite number of actions to choose from, continuous action spaces allow for an infinite number of actions within a specific range. Traditional policy-based methods struggle with continuous actions due to the curse of dimensionality.4. Maximum Entropy Reinforcement Learning:Maximum entropy reinforcement learning aims to learn policies that are not only optimal but also stochastic. Introducing stochasticity in the policy allows for exploration and probabilistic decision-making, enabling the agent to handle uncertainties in the environment. This approach helps prevent the agent from getting trapped in local optima.5. Soft Q-Learning:Soft Q-learning is a variant of the Q-learning algorithm that leverages maximum entropy reinforcement learning principles. Itseeks to learn a soft state-action value function, which combines the typical expected reward with an entropy term. The entropy term encourages exploration by discouraging over-reliance on deterministic policies.6. Policy Optimization with Soft Actor-Critic:In SAC, the actor is responsible for learning the policy distribution, parametrized by a neural network. The critic learns the Q-function, estimating the state-action values. The training procedure consists of sampling actions based on the current policy, collecting trajectories or episodes, and using these samples to update the policy and Q-function.7. Entropy Regularization:SAC utilizes entropy regularization to ensure exploration and stochastic decision-making. The entropy term acts as a regularizer added to the objective function during policy optimization. By maximizing the entropy, the agent strives to maintain a diverse set of actions and explore the full action space.8. Soft Actor-Critic Architecture:The SAC architecture involves three main components: the actornetwork, the critic network, and target networks. The actor network is responsible for learning the policy distribution, while the critic network estimates the Q-function for value estimation. Target networks are used to stabilize the learning process by providing temporally consistent value estimates.9. Experience Replay:Experience replay is a technique employed in SAC to improve sample efficiency and mitigate potential non-stationarity issues. Instead of updating the policy and value function using immediate samples, experience replay stores and replays past experiences. This approach enables the agent to learn from a diverse range of experiences, leading to more robust policy learning.10. Exploration Strategies:Exploration is critical for reinforcement learning, as it allows the agent to discover new and potentially better policies. SAC employs a combination of exploration strategies, including adding noise to the policy parameters or actions. This noise injection encourages the agent to explore different solutions, improving the chance of finding the optimal policy.In conclusion, Soft Actor-Critic is a powerful reinforcement learning algorithm for continuous action spaces. By incorporating maximum entropy reinforcement learning principles, SAC enables robust and flexible control in complex environments. Its actor-critic framework, with entropy regularization, allows for policy optimization and exploration, making it well-suited for real-world problems. Additionally, the use of experience replay and exploration strategies enhances the learning process, leading to better performance and more efficient policy learning.。
基于MaxEnt模型的长蕊木兰在云南省的分布预测及适应性分析

memm条件概率公式解析

memm条件概率公式解析使用MEMM条件概率公式进行分类MEMM(Maximum Entropy Markov Model)是一种基于最大熵原理的马尔可夫模型,它可以用于分类、序列标注等任务。
在本文中,我们将介绍如何使用MEMM条件概率公式进行分类。
MEMM模型的基本思想是,给定一个输入序列,我们需要预测它所属的类别。
为了实现这个目标,我们需要定义一个条件概率模型,即给定输入序列和类别,预测输出的概率。
这个模型可以表示为:P(y|x) = exp(∑i λi f(y, x, i)) / Z(x)其中,y表示类别,x表示输入序列,λi表示模型参数,f(y, x, i)表示特征函数,Z(x)表示归一化因子。
特征函数f(y, x, i)是一个指示函数,它表示当输入序列为x,类别为y时,第i个特征是否满足。
例如,我们可以定义一个特征函数f(y, x, i)表示当输入序列中包含单词“good”时,类别为y的概率是否增加。
模型参数λi可以通过最大熵原理来确定。
最大熵原理认为,我们应该选择一个概率分布,使得它在满足所有已知约束条件的情况下,熵最大。
在MEMM模型中,约束条件是特征函数的期望值等于训练数据中的实际值。
通过最大熵原理,我们可以得到一个唯一的概率分布,即MEMM模型。
归一化因子Z(x)是一个常数,它用于保证概率分布的归一化。
具体来说,它可以表示为:Z(x) = ∑y exp(∑i λi f(y, x, i))其中,y表示所有可能的类别。
在使用MEMM模型进行分类时,我们需要先对输入序列进行特征提取。
具体来说,我们可以定义一些特征函数,用于表示输入序列中的一些特征,例如单词、词性、句法结构等。
然后,我们可以使用MEMM条件概率公式来计算每个类别的概率,选择概率最大的类别作为输出。
MEMM条件概率公式是一种基于最大熵原理的条件概率模型,它可以用于分类、序列标注等任务。
在使用MEMM模型进行分类时,我们需要先对输入序列进行特征提取,然后使用MEMM条件概率公式来计算每个类别的概率,选择概率最大的类别作为输出。
python 最大熵模型 -回复
python 最大熵模型-回复Python最大熵模型(Maximum Entropy Model)是一种经典机器学习算法,它在自然语言处理、信息提取和文本分类等任务中有广泛的应用。
本文将围绕Python最大熵模型展开讨论,并逐步回答你关于该模型的问题。
首先,让我们来了解一下什么是最大熵模型。
最大熵模型是一种统计模型,它是由最大熵原理推导出来的。
最大熵原理认为,在没有任何先验知识的情况下,我们应该选择具有最高熵的模型。
在信息论中,熵是对不确定性的度量,因此最大熵原理可以理解为选择最不确定的模型。
最大熵模型的目标是在满足已知约束条件的情况下,选择最不确定的模型。
下面,让我们来看一下如何使用Python实现最大熵模型。
在Python中有多种库可以实现最大熵模型,其中较为常用的库有NLTK(Natural Language Toolkit)和Scikit-learn。
这两个库都提供了丰富的函数和类来支持最大熵模型的训练和预测。
首先我们需要准备训练数据。
最大熵模型是一种有监督学习算法,因此需要标注好的训练数据来进行模型训练。
训练数据一般由特征和标签组成,特征是用来描述样本的属性,标签是该样本所属的类别。
在NLTK 和Scikit-learn中,通常将特征表示为一个包含多个键值对的字典,其中键表示特征的名称,值表示特征的取值。
接下来,我们可以使用NLTK或Scikit-learn中提供的函数或类进行最大熵模型的训练。
这些函数或类提供了一些参数来进行模型训练的配置,如正则化参数、最大迭代次数和收敛条件等。
我们可以根据具体任务的需求来选择不同的参数配置。
在模型训练完成后,我们可以使用训练好的模型来进行预测。
预测过程同样需要提供待预测样本的特征表示。
最大熵模型会根据已学到的模型参数来为待预测样本进行分类,输出预测结果。
最后,我们可以对模型进行评估。
常用的评估指标包括准确率、召回率、F1值等。
这些指标可以帮助我们评估模型的性能,并做出进一步的改进。
maxent原版英文说明

maxent原版英文说明RESM 575 Spatial AnalysisSpring 2010Lab 6 Maximum EntropyAssigned: Monday March 1Due: Monday March 820 pointsThis lab exercise was primarily written by Steven Phillips, Miro Dudik and Rob Schapire, with support from AT&T Labs-Research, Princeton University, and the Center for Biodiversity and Conservation, American Museum of Natural History. This lab exercise is based on their paper and data:Steven J. Phillips, Robert P. Anderson , Robert E. Schapire.Maximum entropy modeling of species geographic distributions.Ecological Modelling, Vol 190/3-4 pp 231-259, 2006.My goal is to give you a basic introduction to use of the MaxEnt program for maximum entropy model ing of species’ geographic distributions.The environmental data consist of climatic and elevational data for South America, together with a potential vegetation layer. The sample species the authors used will be Bradypus variegatus, the brown-throated three-toed sloth.NOTE on the Maxent softwareThe software consists of a jar file, maxent.jar, which can be used on any computer running Java version 1.4 or later. It can be downloaded, along with associated literature, from /~schapire/maxent. If you are using Microsoft Windows (as we assume here), you should also download the file maxent.bat, and save it in the same directory as maxent.jar. The website has a file called “readme.txt”, which contains instructions for installing the program on your computer.The software has already been downloaded and installed on the machines in 317 Percival.First go to the class website and download the maxent-tutorial-data.zip file.Extract it to the c:/temp folder which will create a c:/temp/tutorial-datadirectory.Find the maxent directory on the c:/ drive of your computer and simply click on the file maxent.bat. The following screen will appear:2To perform a run, you need to supply a file containing presence localities (“samples”), a directory containing environmental variables, and an output directory. In our case, the presence localities are in the file“c:\temp\tutorial-data\samples\bradypus.csv”, the environmental layers are in the directory “layers”, and the outputs are going to go in the directory “outputs”. You can enter these locations by hand, or browse for them. While browsing for the environmental variables, remember that you are looking for the directory that contains them –you don’t need to browse down to the files in the directory. After entering or browsing for the files for Bradypus, the program looks like this:3The file “samples\bradypus.csv” contains the presence localities in .csv format. The first few lines are as follows:species,longitude,latitudebradypus_variegatus,-65.4,-10.3833bradypus_variegatus,-65.3833,-10.3833bradypus_variegatus,-65.1333,-16.8bradypus_variegatus,-63.6667,-17.45bradypus_variegatus,-63.85,-17.4There can be multiple species in the same samples file, in which case more species would appear in the panel, along with Bradypus. Other coordinate systems can be used, other than latitude and longitude, as long as the samples file and environmental layers use the same coordinate system. The “x” coordinate should come before the “y” coordinate in the samples file.The directory “layers” contains a number of ascii ras ter grids (in ESRI’s .asc format), each of which describes an environmental variable. The grids must all have the same geographic bounds and cell size. MAKE SURE YOUR ASCII FILES HAVE THE .asc EXTENSION!!!!!!!!! One of our variables, “ecoreg”, is a cate gorical variable describing potential vegetation classes. You must tell the program which variables are categorical, as has been done in the picture above.Doing a runSimply press the “Run” button. A progress monitor describes the steps being taken. After the environmental layers are loaded and some initialization is done, progress towards training of the maxent model is shown like this:The “gain” starts at 0 and increases towards an asymptote during the run. Maxent is a maximum-likelihood method, and what it is generating is a probability distribution over pixels in the grid. Note that it isn’t calculating “probability of occurrence” – its probabilities are typically very small values, as they must sum to 1 over the whole grid. The gain is a measure of the likelihood of the samples; for example, if the gain is 2, it means that the average sample likelihood is exp(2) ≈ 7.4 times higher than that of a random background pixel. The uniform distribution has gain 0, so you can interpret the gain as representing how much better the distribution4fits the sample points than the uniform distribution does. The gain is closely related to “deviance”, as used in statistics.The run produces a number of output files, of which the most important is an html f ile called “bradypus.html”. Part of this file gives pointers to the other outputs, like this:Looking at a predictionTo see what other (more interesting) content there can be inc:\temp\tutorial-data\outpus\bradpus_variegatus.html, we will turn on a couple of options and rerun the model. Press the “Make pictures of predictions” button, then c lick on “Settings”, and type “25” in the “Random test percentage” entry. Lastly, press the “Run” button again. You may have to say “Replace All” for this new run. After the run completes, the file bradypus.html contains this picture:5The image uses colors to show prediction strength, with red indicating strong prediction of suitable conditions for the species, yellow indicating weak prediction of suitable conditions, and blue indicating very unsuitable conditions. For Bradypus, we see strong prediction through most of lowland Central America, wet lowland areas of northwestern South America, the Amazon basin, Caribean islands, and much of the Atlantic forests in south-eastern Brazil. The file pointed to is an image file (.png) that you can just click on (in Windows) or open in most image processing software.The test points are a random sample taken from the species presence localities. Test data can alt ernatively be provided in a separate file, by typing the name of a “Test sample file” in the Settings panel. The test sample file can have test localities for multiple species.Statistical analysisThe “25” we entered for “random test percentage” told the program to randomly set aside 25% of the sample records for testing. This allows the program to do some simple statistical analysis. It plots (testing and training) omission against threshold, and predicted area against threshold, as well as the receiver operating curve show below. The area under the ROC curve (AUC) is shown here, and if test data are available, the standard error of the AUC on the test data is given later on in the web page.A second kind of statistical analysis that is automatically done if test data are available is a test of the statistical significance of the prediction, using a binomial test of omission. For Bradypus, this gives:6Which variables matter?To get a sense of which variables are most important in the model, we can run a jackknife test, by selecting the “Do jackknife to measure variable important” checkbox . When we press the “Run” button again, a number of models get created. Each variable is excluded in turn, and a model created with the remaining variables. Then a model is created using each variable in isolation. In addition, a model is created using all variables, as before. The results of the jackknife appear in the “bradypus.html” files in three bar charts, and the first of these is shown below.7We see that if Maxent uses only pre6190_l1 (average January rainfall) it achieves almost no gain, so that variable is not (by itself) a good predictor of the distribution of Bradypus. On the other hand, October rainfall (pre6190_l10) is a much better predictor. Turning to the lighter blue bars, it appears that no variable has a lot of useful information that is not already contained in the others, as omitting each one in turn did not decrease the training gain much.The bradypus_variegatus.html file has two more jackknife plots, using test gain and AUC in place of training gain. This allows the importance of each variable to be measure both in terms of the model fit on training data, and its predictive ability on test data.How does the prediction depend on the variables?Now press the “Create response curves”, deselect the jackknife option, and rerun the model. This results in the following section being added to the“bradypus_variegatus.html” file:8Each of the thumbnail images can be clicked on to get a more detailed plot. Looking at frs6190_ann, we see that the response is highest for frs6190_ann = 0, and is fairly high for values of frs6190_ann below about 75. Beyond that point, the response drops off sharply, reaching -50 at the top of th e variable’s range.So what do the values on the y-axis mean? The maxent model is an exponential model, which means that the probability assigned to a pixel is proportional to the exponential of some additive combination of the variables. The response curve above shows the contribution of frs6190_ann to the exponent. A difference of 50 in the exponent is huge, so the plot for frs6190_ann shows a very strong drop in predicted suitability for large values of the variable.On a technical note, if we are modeling interactions between variables (by using product features) as we are for Bradypus here, then the response curve for one variable will depend on the settings of other variables. In this case, the response curves generated by the program have all other variables set to their mean on the set of presence localities.Note also that if the environmental variables are correlated, as they are here, the response curves can be misleading. If two closely correlated variables have strong response curves that are near opposites of each other, then for most pixels, the combined effect of the two variables may be small. To see how the response curve depends on the other variables in use, try comparing the above picture with the response curve obtained when using only frs6190_ann in the model (by deselecting all other variables).Feature types and response curvesResponse curves allow us to see the difference between different feature types. Deselect the “auto features”, select “Threshold features”, and press the “Run” button again. Take a look at the resulting feature profiles –you’ll notice that they are all step functions, like this one for pre6190_l10:9If the same run is done using only hinge features, the resulting feature profile looks like this:The outline of the two profiles is similar, but they differ because the different classes of feature types are limited in the shapes of response curves they are capable of modeling. Using all classes together (the default, given enough samples) allows many complex response curves to be accurately modeled.10SWD FormatThere is a second input format that can be very useful, especially when your environmental grids are very large. For lack of a better name, it’s called “samples with data”, or just SWD.The SWD version of our Bradypus file, called “bradypus_swd.csv”, starts like this:species,longitude,latitude,cld6190_ann,dtr6190_ann,ecoreg,frs6190_ann,h_dem,pre6190_ann,pre6190_l10,pre61 90_l1,pre6190_l4,pre6190_l7,tmn6190_ann,tmp6190_ann,tmx6190_ann,vap6190_annbradypus_variegatus,-65.4,-10.3833,76.0,104.0,10.0,2.0,121.0,46.0,41.0,84.0,54.0,3.0,192.0,266.0,337.0,279.0 bradypus_variegatus,-65.3833,-10.3833,76.0,104.0,10.0,2.0,121.0,46.0,40.0,84.0,54.0,3.0,192.0,266.0,337.0,279.0 bradypus_variegatus,-65.1333,-16.8,57.0,114.0,10.0,1.0,211.0,65.0,56.0,129.0,58.0,34.0,140.0,244.0,321.0,221.0 bradypus_variegatus,-63.6667,-17.45,57.0,112.0,10.0,3.0,363.0,36.0,33.0,71.0,27.0,13.0,135.0,229.0,307.0,202.0 bradypus_variegatus,-63.85,-17.4,57.0,113.0,10.0,3.0,303.0,39.0,35.0,77.0,29.0,15.0,134.0,229.0,306.0,202.0It can be used in place of an ordinary samples file. The difference is only that the program doesn’t need to look in the environmental layers to get values for the variables at the sample points. The environmental layers are thus only used to get “background” pixels – pixels where the species hasn’t necessarily been found. In fact, the background pixels can also be specified in a SWD format file, in which case the “species” column is ignored. The file “b ackground.csv” has 10,000 background data points in it. The first few look like this:background,-61.775,6.175,60.0,100.0,10.0,0.0,747.0,55.0,24.0,57.0,45.0,81.0,182.0,239.0,300.0,232.0 background,-66.075,5.325,67.0,116.0,10.0,3.0,1038.0,75.0,16.0,68.0,64.0,145.0,181.0,246.0,331.0,234.0 background,-59.875,-26.325,47.0,129.0,9.0,1.0,73.0,31.0,43.0,32.0,43.0,10.0,97.0,218.0,339.0,189.0 background,-68.375,-15.375,58.0,112.0,10.0,44.0,2039.0,33.0,67.0,31.0,30.0,6.0,101.0,181.0,251.0,133.0 background,-68.525,4.775,72.0,95.0,10.0,0.0,65.0,72.0,16.0,65.0,69.0,133.0,218.0,271.0,346.0,289.0We can run Maxent with “bradypus_swd.csv” as the samples file and “background.csv” (both located in the “swd” directory) as the environmental layers file. Try running it – yo u’ll notice that it runs much faster, because it doesn’t have to load the big environmental grids. The downside is that it can’t make pictures or output grids, because it doesn’t have all the environmental data. The way to get around this is to use a “projection”, described below.Batch runningSometimes you need to generate a number of models, perhaps with slight variations in the modeling parameters or the inputs. This can be automated using command-line arguments, avoiding the repetition of having to click and type at the program interface. The command line arguments can either be given from a command window (a.k.a. shell), or they can defined in a batch file. Take a look at the file “batchExample.bat” (for example, using Notepad). It contains th e following line:java -mx512m -jar maxent.jar environmentallayers=layers togglelayertype=ecoreg samplesfile=samples\bradypus.csv outputdirectory=outputs redoifexists autorunThe effect is to tell the program where to find environmental layers and samples file and where to put outputs, to indicate that the ecoreg variable is categorical. The “autorun” flag tells the program to start running immediately, without waiting for the “Run” button to be pushed. Now try clicking on the file, to see what it does.Many aspects of the Maxent program can be controlled by command-line arguments –press the “Help” button to see all the possibilities.Multiple runs can appear in the same file, and they will simply be run one after the other. You can change the default values of most parameters by adding command-line arguments to the “maxent.bat” file.Regularization.The “regularization multiplier” parameter on the “settings” panel affects how focused the output distribution is – a smaller value will result in a more localized output distribution that fits the given presence records better, but is more prone to overfitting. A larger value will give a more spread-out prediction. Try changing the multiplier, and look at the pictures produced. As an example, setting the multiplier to 3 makes the following picture, showing a much more diffuse distribution than before:ProjectingA model trained on one set of environmental layers can be “projected” by applying it to another set of environmental layers. Situations where projections are needed include modeling species distributions under changing climate conditions, and modeling invasive species. Here we’re going to use projection for a very simple task: making an output grid and associated picture when the samples and background are in SWD format. Type or browse in the samples file entry to point to the file“swd\bradypus_swd.csv”, and similarly for the environmental layers in“swd\background.csv”, then enter the “layers” directory in the “Projection Layers Dir ectory”, as pictured below.When you press “Run”, a model is trained on the SWD data, and then projected onto the full grids in the “layers” directory. The output grid is called“bradypus_variegatus_layers.asc”, and in general, the projection direct ory name is appended to the species name, in order to distinguish it from the standard(un-projected) output. If “make pictures of predictions” is selected, a picture of the projected model will appear in the “bradypus_variegatus.html” file.NOTE: ascii files can be converted into ESRI Grids by using the Ascii to Raster grid command in ArcToolbox.Your assignment is to convert the ascii file into a grid format, display it in ArcMap and create a map layout. Provide an appropriate legend showing the probabilities. Print it out and turn in to class next week.。
失效概率函数求解的高效算法

失效概率函数求解的高效算法凌春燕;吕震宙;员婉莹【摘要】An efficient method was developed to obtain the failure probability function which combines the fractional moment-based maximum entropy method and the surrogate model method.The idea of the process is to build the failure probability function iteratively by the active learning Kriging method.Firstly, a crude failure probability function was established by using a few training samples.Then the training samples which violate the restraints of the learning function were added to update the failure probability function until the accuracy of the problem was satisfied. The fractional moment-based maximum entropy method was used to get the failure probability sample for every distribution parameter′s training sample.The samples of the failure probability could be evaluated efficiently and accurately for the optimization strategy in the fractional moment-based maximum entropy method, which could approximate the probability density function of the response effectively , and the fractional moments were estimated by the dimensional reduction method.Two examples were illustrated in the end to compare several methods such as the Bayes method, the Monte Carlo method, and so on.From the numerical results, it can be seen that the proposed method can accurately solve the problem with complex performance function and can reduce the computational cost significantly.%结合基于分数矩约束的极大熵方法和替代模型法,发展了一种失效概率函数求解的高效算法.所提算法的基本思路是利用自主学习的迭代Kriging方法来构造失效概率函数,即采用较少的训练样本来构造粗糙的失效概率函数,在此基础上通过添加新的违反学习函数约束的样本来更新失效概率函数,直到达到精度要求.对于每一个分布参数的训练样本点,所提方法采用分数矩约束的极大熵法来求解相应的失效概率样本.由于分数矩的计算采用了高效的降维积分,并且由于分数矩约束下极大熵法中优化策略高效地逼近了响应的概率密度函数,从而使得失效概率样本能够被高效高精度地估计出来.为了检验所提方法的精度及效率,给出了两个算例,对比了所提方法与已有的失效概率函数求解的Bayes公式法及Monte Carlo法等,结果表明,所提方法适用于求解复杂的功能函数问题,且在满足精度要求的基础上大大降低了计算量.【期刊名称】《国防科技大学学报》【年(卷),期】2018(040)003【总页数】9页(P159-167)【关键词】失效概率函数;自主学习Kriging方法;分数矩;极大熵方;降维方法【作者】凌春燕;吕震宙;员婉莹【作者单位】西北工业大学航空学院,陕西西安 710072;西北工业大学航空学院,陕西西安 710072;西北工业大学航空学院,陕西西安 710072【正文语种】中文【中图分类】TB114.3工程中,一般输入随机变量x的分布形式是已知的,但是其分布参数θ通常是未知的。
最大熵强化学习算法SAC

最大熵强化学习算法SACSAC:Soft Actor-Critic,Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor。
模型结构模型同时学习action value Q、state value V和policy π。
1.V中引入Target V,供Q学习时使用;Target Network使学习有章可循、效率更高。
2.Q有两个单独的网络,选取最小值供V和π学习时使用,希望减弱Q的过高估计。
3.π学习的是分布的参数:均值和标准差;这与DDPG不同,DDPG的π是Deterministic的,输出直接就是action,而SAC学习的是个分布,学习时action需要从分布中采样,是Stochastic的。
SoftSoft,Smoothing,Stable。
原始的强化学习最大熵目标函数(maximum entropy objective)如下,比最初的累计奖赏,增加了policy π的信息熵。
A3C目标函数里的熵正则项和形式一样,只是作为正则项,系数很小。
在Soft Policy Iteration中,近似soft Q-value的迭代更新规则如下:其中V(s)为soft state value function:根据信息熵的定义:soft state value function和maximum entropy objective在形式上还是一致的,系数α能通过调节Q-value消掉,可忽略。
TD3的soft state value function V形式与Soft Policy Iteration 中类似,但是SAC的action是通过对policy π采样确定地得到,每条数据数据的信息熵就是其不确定性-logπ(a|s);但考虑整个批量batch数据,其整体还是π的信息熵,与maximum entropy方向一致。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
That is, the model p∗ which maximizes the entropy H should be selected from C . p∗ = argmax H (p)
p∈C
(8)
This heuristic is called the maximum entropy principle. 3.3 Parameter Estimation In simple cases, we can find the solution to the equation (8) analytically. Unfortunately, there is no analytical solution in general cases, and we need a numerical algorithm to find the solution. By applying the Lagrange multiplier to equation (7), we can introduce the parametric form of p. p λ (y | x ) = 1 exp Z λ (x ) exp
If there exist x1 , y1 , . . . , xT , yT ∈ X × Y such that each xi is translated into yi in the parallel corpora X, Y , then its empirical probability distribution p ˜ obtained from observed training data is defined by: p ˜(x, y ) = c(x, y ) x,y c(x, y ) (1)
x,y
3
Maximum Entropy Method
p ˜(x)p(y |x) log p(y |x)
(7)
3.1 Feature Function We define binary-valued indicator function f : X × Y → {0, 1} which divide X × Y into two subsets. This is called feature function, which expresses statistical properties of a language model. The expected value of f with respected to p ˜(x, y ) is defined such as: p ˜(f ) =
where c(x, y ) is the number of times that x is translated into y in the training data. However, since it is difficult to observe translating between words actually, c(x, y ) is approximated with equation (2) for sentence aligned parallel corpora. c(x, y ) =
is the number of times that x and y appear in the i-th sentence. Our task is to learn the translation rules by estimating probability distribution p(y |x) that x ∈ X is translated into y ∈ Y from p ˜(x, y ) given above.
y i
p ˜(x, y )f (x, y )
(3)
Thus training data are summarized as the expected value of feature function f . The expected value of a feature function f with respected to p(y |x) which we would like to estimate is defined such as: p (f ) =
Maximum Entropy Model Learning of the Translation Rules Kengo Sato and Masakazu Nakanishi Department of Computer Science Keio University 3–14–1, Hiyoshi, Kohoku, Yokohama 223-8522, Japan e-mail: {satoken,czl}@nak.ics.keio.ac.jp Abstract
x,y
p ˜(x)p(y |x)f (x, y )
(4)
λi fi (x, y )
i
(9)
where p ˜(x) is the empirical probability distribution on X . Then, the model which we would like to estimate is under constraint to satisfy an equation such as: p (f ) = p ˜(f ) This is called the constraint equation. 3.2 Maximum Entropy Principle When there are feature functions fi (i ∈ {1, 2, . . . , n}) which are important to modeling processes, the distribution p we estimate should be included in a set of distributions defined such as:
i
ci (x, y ) |Xi ||Yi |
(2)
where Xi is i-th sentence in X . We denote that sentence Xi is translated into sentence Yi in aligned parallel corpora. And ci (x, y )
This paper proposes a learning method of translation rules from parallel corpora. This method applies the maximum entropy principle to a probabilistic model of translation rules. First, we define feature functions which express statistical properties of this model. Next, in order to optimize the model, the system iterates following steps: (1) selects a feature function which maximizes loglikelihood, and (2) adds this function to the model incrementally. As computational cost associated with this model is too expensive, we propose several methods to suppress the overhead in order to realize the system. The result shows that it attained 69.54% recall rate. the machine translation has been made by human hand usually. However, since this work requires a great deal of labor and it is difficult to keep description of dictionaries consistent, the researches of automatical dictionaries making for machine translation (translation rules) from corpora become active recently (Kay and R¨ oschesen, 1993; Kaji and Aizono, 1996). In this paper, we notice that estimating a language model based on ME method is suitable for learning the translation rules, and propose several methods to resolve problems in adapting ME method to learning the translation rules.
the most suitable for the training corpora. The conditional entropy defined in equation (7) is used as the mathematical measure of the uniformity of a conditional probability p(y |x). H (p ) = −
2
Problem Setting
1
Introduction
A statistical natural language modeling can be viewed as estimating a combinational distribution X × Y → [0, 1] using training data x1 , y1 , . . . , xT , yT ∈ X × Y observed in corpora. For this topic, Baum (1972) proposed EM algorithm, which was basis of Forward-Backward algorithm for the hidden Markov model (HMM) and Inside-Outside algorithm (Lafferty, 1993) for the probabilistic context free grammar (PCFG). However, these methods have problems such as increasing optimization costs which is due to a lot of parameters. Therefore, estimating a natural language model based on the maximum entropy (ME) method (Pietra et al., 1995; Berger et al., 1996) has been highlighted recently. On the other hand, dictionaries for multilingual natural language processing such as