便携式水果采摘器的设计研究
水果采摘机器人的设计与研究
水果采摘机器人的设计与研究近年来,随着人们生活水平的提高和对健康饮食的关注度越来越高,水果市场需求呈现不断扩大的趋势,而水果采摘工作一直是农业生产中最为繁重而费时的一项工作。
而恰恰在这个时候,水果采摘机器人应运而生,成为解决水果采摘难题的重要手段。
水果采摘机器人的设计研究主要目的就在于实现水果采摘的自动化,降低人力成本,增加生产效率,并提高采摘品质。
通常,水果采摘过程需要寻找果实、摘取、确认和归置等重要环节。
这正是水果采摘机器人设计需要关注的几个关键问题。
首先,对于果实的收集和寻找,机器人必须具备良好的检测机能,能够准确地识别果实的位置和成熟度,并相应地进行采摘工作。
常见的技术手段包括视觉检测、机器视觉、激光雷达、超声波、红外线等多种传感器技术,在水果采摘机器人的设计过程中可以依据实际需要进行合理组合。
其次,在进行果实采摘的过程中,自动化机器人必须能够准确地控制机械臂、夹持器件,完成传统采摘工人的操作。
针对不同类型的水果,需要通过合理的控制系统设计来确保夹持器的适配性,避免因机器误差导致成果量降低、损坏等风险,并保证采摘品质的稳定。
除此之外,水果采摘机器人在工作中还需要完成果实的分类、检查和归置等环节。
因此,与机械臂配合运作可以通过设计附加功能,实现这些可能变化的操作过程。
一个优秀的水果采摘机器人,必须具备稳定的识别能力,高效的采摘能力,以及符合人体工程学要求的机械结构、坚固的电机驱动等一系列必要的先进设计特色。
传统水果采摘方式通常需要耗费大量人力物力,机器人成为农业生产自动化发展的必然结果,其存在,将大大提高水果采摘的效率,降低农业生产管理成本,而且也极大的缓解了劳动力短缺的现状,真正做到了科技与农业的有机结合。
未来,水果采摘机器人还有很大的研究和发展空间。
通过人工智能的运用以及机器学习技术的应用,机器人在识别果实所处的成熟期、预测产量、选择采摘的最佳时间和地址方面将更加优秀。
农业机械自动化技术作为生产力升级的突破口,必将进一步推动中国现代化农业建设,推动国家经济的持续健康发展。
便携自夹式草莓采摘装置设计

控,安全性好,便于操作,也可实现对一些贴近地面的水果和1 设计思路来源水果提高了人民的生活质量,成为更多人的日常选择。
研其它小型水果实施采摘,故其适用范围广,采摘效率高。
究发现,草莓中的有效成分可抑制癌肿的生长,维生素C能消除细胞间的松弛与紧张状态,坚固脑细胞结构,对脑和智力发育有重要影响,草莓汁具有美容防皱作用。
且富含丰富的维生素C、氨基酸、果糖、蔗糖、维生素B 、B 及矿物质钙、镁、磷、12铁等微量元,能有效促进儿童生长发育,且对老人、儿童大有裨益。
故草莓因其独特的营养价值和口感,深受大众的喜爱。
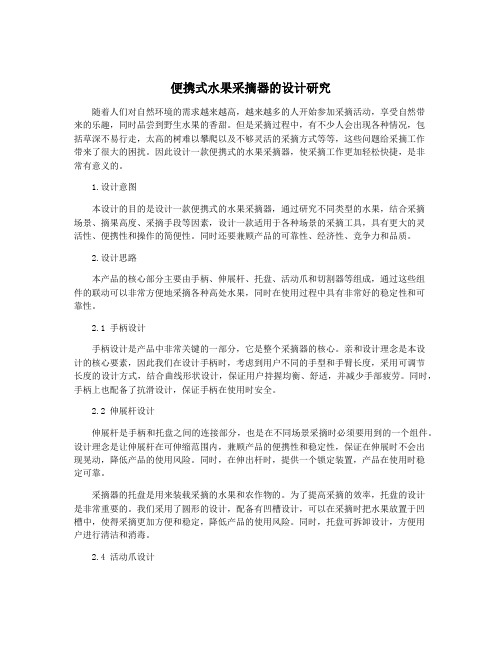
消费者对于草莓的需求量不断加大,带动了草莓种植面积的扩大,当前国内草莓种植面积约130万亩,草莓的产量高达1-活动手柄,2-固定手柄,3-连接杆,4-钢丝绳,5-弹簧,140万斤。
宽广的种植面积和巨大的产量,以及庞大的消费市场6-活动剪,7-固定剪,8-活动块,9-固定块,10-安装板。
背后,必定会对草莓采摘提出了更高的要求,因而草莓采摘成图1 草莓采摘器的结构2.2 主要结构材料选用为了研究的热点。
德国、日本等国家在机械设计与制造方面相控制装置:控制手柄采用采用塑料,质轻,易成型,成本对比较先进,在草莓采摘领域所采用的大多是自动化与智能化低;基于人机工程学原理,控制手柄握持部分采用若干段圆弧设备,此模式对于草莓种植规范化极高,自动化与智能化采摘连接,形状恰好与四指配合,方便操作者使用,提高舒适感,成本也较高。
而中小种植基地、地形复杂的地区大都依靠人工操作时得心应手。
徒手采摘,长期弯腰会造成腰肌劳损和腰椎盘突出等疾病,且连接杆:连接杆为空心不锈钢材质,降低整体质量,有效指头有可能受伤。
可见研发辅助人工采摘草莓的机械设备尤为防止潮湿环境下锈蚀,同时具有强度高、耐磨性好的特性,延迫切,研发和设计一款低成本、实用、易操作、无需弯腰的便长草莓采摘器的使用寿命。
为实现手柄控制剪切装置,连接杆携草莓采摘器来辅助工人进行草莓采摘具有重要的意义。
便携式水果采摘器的设计研究
便携式水果采摘器的设计研究随着人们对自然环境的需求越来越高,越来越多的人开始参加采摘活动,享受自然带来的乐趣,同时品尝到野生水果的香甜。
但是采摘过程中,有不少人会出现各种情况,包括草深不易行走,太高的树难以攀爬以及不够灵活的采摘方式等等,这些问题给采摘工作带来了很大的困扰。
因此设计一款便携式的水果采摘器,使采摘工作更加轻松快捷,是非常有意义的。
1.设计意图本设计的目的是设计一款便携式的水果采摘器,通过研究不同类型的水果,结合采摘场景、摘果高度、采摘手段等因素,设计一款适用于各种场景的采摘工具,具有更大的灵活性、便携性和操作的简便性。
同时还要兼顾产品的可靠性、经济性、竞争力和品质。
2.设计思路本产品的核心部分主要由手柄、伸展杆、托盘、活动爪和切割器等组成,通过这些组件的联动可以非常方便地采摘各种高处水果,同时在使用过程中具有非常好的稳定性和可靠性。
2.1 手柄设计手柄设计是产品中非常关键的一部分,它是整个采摘器的核心。
亲和设计理念是本设计的核心要素,因此我们在设计手柄时,考虑到用户不同的手型和手臂长度,采用可调节长度的设计方式,结合曲线形状设计,保证用户持握均衡、舒适,并减少手部疲劳。
同时,手柄上也配备了抗滑设计,保证手柄在使用时安全。
2.2 伸展杆设计伸展杆是手柄和托盘之间的连接部分,也是在不同场景采摘时必须要用到的一个组件。
设计理念是让伸展杆在可伸缩范围内,兼顾产品的便携性和稳定性,保证在伸展时不会出现晃动,降低产品的使用风险。
同时,在伸出杆时,提供一个锁定装置,产品在使用时稳定可靠。
采摘器的托盘是用来装载采摘的水果和农作物的。
为了提高采摘的效率,托盘的设计是非常重要的。
我们采用了圆形的设计,配备有凹槽设计,可以在采摘时把水果放置于凹槽中,使得采摘更加方便和稳定,降低产品的使用风险。
同时,托盘可拆卸设计,方便用户进行清洁和消毒。
2.4 活动爪设计活动爪是采摘器中非常重要的一个部分,可以抓住水果并且高效地将其摘下。
《2024年智能移动式水果采摘机器人系统的研究》范文
《智能移动式水果采摘机器人系统的研究》篇一一、引言随着现代农业的不断发展,高效、快速和自动化的果实采摘方式成为当下农业生产中急需解决的问题。
在许多农产区,特别是在果树种植区域,劳动力短缺、成本高昂以及传统采摘方式效率低下等问题严重制约了农业的可持续发展。
因此,研究并开发智能移动式水果采摘机器人系统,对于提高果实采摘效率、降低人工成本、促进农业现代化具有重要意义。
本文旨在探讨智能移动式水果采摘机器人系统的研究现状、技术原理、应用前景及未来发展趋势。
二、研究现状当前,国内外众多科研机构和企业对智能移动式水果采摘机器人系统进行了深入研究。
在技术层面,主要涉及到机器人运动控制技术、图像识别与处理技术、机器学习与人工智能技术等。
在研究过程中,这些技术共同作用,使采摘机器人能够在果园环境中自主导航、定位果实并进行精确采摘。
三、技术原理智能移动式水果采摘机器人系统的技术原理主要包括以下方面:1. 机器人运动控制技术:通过控制算法和传感器,使机器人能够在果园环境中自主移动和定位,以适应不同的地形和果树分布。
2. 图像识别与处理技术:利用计算机视觉技术,对果实进行识别和定位,实现精确采摘。
3. 机器学习与人工智能技术:通过训练模型,使机器人具备自主学习和适应能力,能够根据不同种类和成熟度的果实进行采摘。
四、应用前景智能移动式水果采摘机器人系统的应用前景广阔。
首先,它可以大幅提高果实采摘效率,降低人工成本,解决劳动力短缺问题。
其次,机器人可以适应各种复杂环境,减少对环境的破坏和污染。
此外,智能采摘机器人还可以根据果实的成熟度和品质进行筛选,提高果实的产量和质量。
在农业现代化的进程中,智能移动式水果采摘机器人系统将成为农业生产的重要工具。
五、未来发展趋势未来,智能移动式水果采摘机器人系统将朝着以下方向发展:1. 更加智能化:随着人工智能技术的不断发展,采摘机器人将具备更强的自主学习和适应能力,能够适应更多种类的果实和复杂的果园环境。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究1. 引言1.1 背景介绍便携式水果采摘器是一种方便快捷的农业工具,可以帮助农民更高效地采摘水果。
随着人们对健康生活的重视和消费水平的提升,水果成为了人们日常饮食中不可或缺的一部分。
传统的水果采摘方法存在着许多问题,比如劳动强度大、效率低、采摘不够完整等。
设计一款便携式水果采摘器,成为了现代农业技术的一个重要议题。
便携式水果采摘器的设计与研究,将会对农业生产的提高产生积极的影响。
它不仅可以减轻农民的劳动负担,提高采摘效率,还可以保证水果的采摘质量。
随着市场需求的增加,便携式水果采摘器将会成为一个备受关注的新兴产业。
本篇文章将深入探讨便携式水果采摘器的设计原理、结构设计、材料选择、使用方法以及市场前景,以期为相关研究提供新的思路和方向。
1.2 研究目的研究目的是为了探讨便携式水果采摘器在现代农业生产中的应用情况,分析其在提高农民采摘效率、减轻劳动强度方面的作用。
通过研究便携式水果采摘器的设计原理、结构设计、材料选择以及使用方法,旨在为农民提供更加便捷、高效的采摘工具,提升水果采摘的效率和质量。
将探讨便携式水果采摘器在市场上的潜在需求和发展前景,促进农业生产的现代化、智能化进程,推动农业产业的健康发展。
通过本研究,还将为便携式水果采摘器的进一步改进和优化提供理论依据和实践经验,为相关领域的研究工作提供参考和借鉴。
1.3 研究意义便携式水果采摘器的设计研究意义在于提高水果采摘效率和减轻劳动强度。
当前,传统的水果采摘方式主要依靠人工操作,效率低下且容易造成劳动者劳累。
而便携式水果采摘器的研究和设计将有效解决这一问题,使水果采摘过程更加简便、快捷和高效。
便携式水果采摘器的普及和推广还有利于提高农业生产效率,促进农业现代化发展。
通过研究便携式水果采摘器的设计,还能促进相关技术和工程领域的发展,推动智能化设备在农业领域的应用。
便携式水果采摘器的设计研究具有重要的实用价值和社会意义,对于提升农业生产效率和提高农民生活质量具有积极的推动作用。
便携式荔枝采摘器设计

2021.18科学技术创新便携式荔枝采摘器设计韩忠义张向红(河北省智能装备数字化设计及过程仿真重点实验室,唐山学院,河北唐山063000)1概述荔枝果味甘、酸、性温,是顽固性呃逆及五更泻者的食疗佳品,同时有补脑健身,开胃益脾,有促进食欲之功效。
我国民间素有“荔枝上市,百果让位”之说,可见,鲜嫩欲滴的荔枝实乃夏日百果之冠。
荔枝树属常绿乔木,荔枝果一般生长于果树树冠表面,另外荔枝果皮薄汁多,采摘时很容易受到损伤而造成腐烂。
同时荔枝的采摘季节正值盛夏,气温常达30益以上,因此给果农采摘工作带来极大的不便。
荔枝采摘过程中,除了要保证果实品质品相的完整,还要注意对果树进行保护以免造成对果树的伤害,以确保荔枝母树来年生产。
所以,对低矮的荔枝一般人工直接采摘,而高处的荔枝则要通过搭起长梯、果农自带背篓爬上梯子直接采摘或人站在梯子上利用简单的工具进行采摘(如图1),工人负重工作,同时需要频繁上下长梯运送果实。
劳动强度很大,劳动环境差且效率较低,安全性无法保证,因而是采摘过程具有一定的危险性。
因此采摘作业是荔枝生产过程中既耗时、又费力的一个环节。
为便于采摘,荔枝树在培育过程中一般将树冠修整为半球形或锥形,为防止果实碰伤,采摘时一般是整束采收。
为减轻果农劳动强度,提高工作效率,经济实惠,安全有效的采摘器设计就显得尤为重要。
2便携式荔枝采摘器设计便携式荔枝采摘器便于携带,结构简单,操作容易,而且可以满足不同高度的荔枝采摘任务。
主要包括:主体,夹持装置,剪切装置三大部分。
如图2所示。
工作时,果农首先通过观察确定能采摘的成熟荔枝位置,然后用摘果器夹持装置夹持钳对正荔枝束,闭合夹持手闸使其对荔枝束进行夹紧,再利用夹持手闸的锁紧装置使荔枝束被锁紧在采摘器夹持装置上,然后闭合剪切手闸实施剪切。
设计时,剪切装置位于夹持装置正后方,使得剪切位置始终位于夹持部位后下方,夹持钳完成夹紧时剪切剪同时到达剪切位置,并在夹持钳的作用下,使得荔枝束完全落入剪切剪内。
一种便携式水果采摘收集装置及使用方法分析

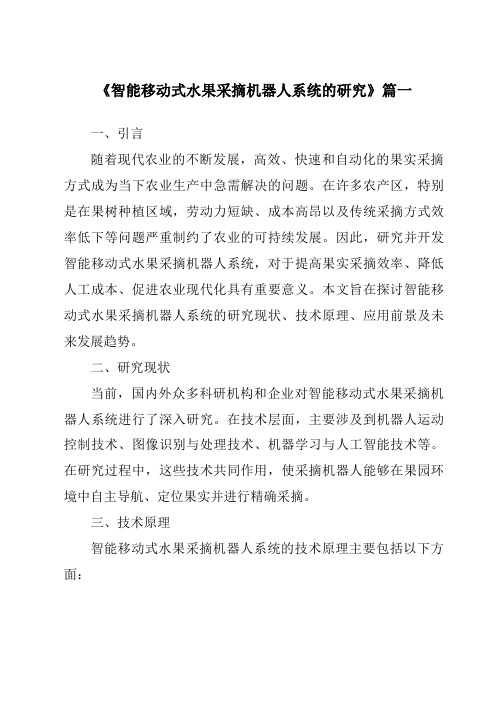
图1 整体装置三维模型图装置的采摘部分见图2,主要通过电路开关控制电磁铁磁性,利用电磁铁闭合过程带动剪刀进行水果采摘。
操纵杆上方的机械剪是主要工具,机械剪可使用很锋利的合金刀具(刀口朝上,保证剪刀开口时刀刃不会划伤图2 机械剪三维模型图图4 实物模型图5.2 本装置模型操作步骤1)将折叠的金属细杆伸直,将盘卷的长布袋解开,把布袋末端放入收集箱内;2)双手紧握金属细杆末端,右手大拇指搭放在电磁继电器开关上,双手自由移动,移向待采摘的水果树梢;3)发现目标后,缓缓移动金属细杆,使得水果梗处于剪刀动刃与静刃之间,保持平衡,此时右手大拇指将电磁继电器开关推至开始位置,电磁铁与铁块发生碰撞后,再将电磁继电器开关推回原位,水果沿长布袋滚落入收集箱内。
至此,一次采摘操作完成。
5.3 本装置模型需要改进之处1)改装的剪刀焊接电磁铁与铁块,质量增加,而采樱桃等,其收集装置可将水果自动分隔,防止水果挤压导致表面损伤,减小因采摘失误导致的损失。
机械装置便携简单,没有传统机械采摘装置的齿轮和轴承等复杂结构,成本低廉且维护方便,可随身携带,可大量生产,生产成本低,性价比高。
机械装置维护方便,只需定期更换电池以及对剪刀进行简单维护。
7 发展前景目前,市场上的很多水果辅助采摘装置都存在以下缺陷。
1)水果枝条较为坚硬,韧性较强,使用普通的切割装置往往难以一次性切断,造成切割不彻底,需要反复切割,影响采摘效率。
2)水果所在位置较高,采摘装置的机械臂较长,剪切装置需要精确对准水果枝条,其精确度难以满足实际使用需求,采摘者需要手动调整机械臂,调整效果不佳。
3)采摘装置普遍体积较大,重量较重,不便于随身携带,难以在地势较为崎岖的水果产区展开采摘作业。
4)水果收集装置中堆积大量水果,空间较为狭窄,水果之间相互挤压,容易导致水果表面损伤甚至破损变形,发霉变质。
针对这些缺陷,利用低成本的材料设计出了此高性能的便携式水果采摘机械,在现今水果采摘工作量大、采摘时间长、采摘成本高的背景下,有着显著优势和较高的社会价值,可以帮助果农加快采摘速率、降低水果采摘成本、减小因采摘不及时而导致的损失。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究随着健康生活和自然食品的需求的日益增长,在很多家庭和社区中,采摘新鲜水果已经成为人们一个受欢迎的体验和活动。
然而,在采摘过程中,由于人们必须手动采摘和收集水果,这个体验往往是劳动密集的且容易受到限制的。
因此,在这篇文章中,我们将介绍一个便携式水果采摘器的设计研究以解决这一问题。
1. 设计目标我们的目标是设计出一个简单,易于操作和便携式的水果采摘器,使得人们可以方便地采摘新鲜水果。
我们希望这个采摘器可以节约时间和劳动力,并且可以被广泛应用于不同类型的水果,如苹果,橙子等。
2. 设计思路我们的设计思路基于三个关键部分:手柄,收集篮和裁切部分。
手柄部分是用户用来握住和操作采摘器的部分,必须是符合人体工学的设计。
而收集篮是用来收集采摘的水果,必须具有足够的容量。
同时,裁切部分负责将水果切下并收集在篮子里。
3. 设计细节a. 手柄设计我们的手柄采用柔软的橡胶材质,并设计为符合人体工学。
这可以使操作者随时随地轻松地握住采摘器,使手不会出现疲劳。
同时,采摘器的整体重量也必须轻便,以便操作者能够长时间使用。
b. 收集篮设计收集篮部分的设计由两个主要部分组成:篮子和笼子。
篮子采用塑料材料制成,具有足够的容量可以容纳各种大小的水果。
而笼子采用合金材料,可以固定在采摘器的裁切部分,以便在采摘过程中能够自动打开和关闭。
c. 裁切部分设计采摘器的裁切部分由一个锋利的切割镊子组成。
这个部分可以用来切下水果并将其放入篮子中。
这个部分必须做到精细和准确以确保最小的损失。
4. 实现方案我们的设计的实现方案可以概括为以下几点:a. 选择合适的材料,如优质的塑料,铝合金和橡胶。
b. 设计人体工学的手柄并结合操作操作采摘器时的力学原理。
c. 设计基于摇杆式机械结构的裁切部分以确保准确性和精密度。
d. 开发一个自动打开和关闭的收集篮,以便于操作者连续采摘水果并收集在篮子中。
5. 结论和展望我们的研究为便携式水果采摘器的设计提供了一个高效、简单、易用和符合人体工学的解决方案。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究【摘要】本文研究了便携式水果采摘器的设计,通过分析研究背景、研究目的和研究意义,探讨了其设计原理、设计要求、关键技术、设计方案和实验验证。
设计研究总结认为,便携式水果采摘器具有广阔的应用前景,未来可以进一步优化设计,提高采摘效率和便利性。
本文为便携式水果采摘器的设计提供了重要参考,有望推动相关领域的研究和发展,实现更加高效和便捷的水果采摘方式。
【关键词】便携式水果采摘器、设计研究、研究背景、研究目的、研究意义、设计原理、设计要求、关键技术、设计方案、实验验证、设计研究总结、展望未来、应用前景。
1. 引言1.1 研究背景便携式水果采摘器是一种方便快捷的农业工具,能够帮助农民高效地采摘水果,提高采摘效率,减轻劳动强度。
随着人们生活水平的提高和对生活品质要求的增加,便携式水果采摘器的需求也在不断增加。
传统的手工采摘方式存在劳动强度大、效率低等问题,而现代化的便携式水果采摘器能够有效解决这些问题。
研究便携式水果采摘器的设计与改进具有重要的现实意义。
通过对便携式水果采摘器的设计原理、要求、关键技术进行研究,可以为提高农业生产效率、推动农业现代化发展提供技术支持。
便携式水果采摘器的设计研究也可以促进农业机械化水平的提高,推动农业产业的发展,对促进农村经济发展和农民增收具有重要意义。
1.2 研究目的研究目的是通过对便携式水果采摘器的设计和研究,探索一种更加便捷高效的水果采摘方式,提高采摘效率和质量。
通过研究水果采摘器的设计原理和关键技术,不仅可以提升水果采摘的效率,还能减轻劳动强度,改善采摘工作环境,降低人工损耗。
研究便携式水果采摘器的设计和实验验证,还可以促进相关领域技术的进步和创新,在农业生产中发挥更大的作用。
本研究旨在为便携式水果采摘器的设计和应用提供新的思路和方法,为农业生产提供更多的技术支持和帮助,推动农业现代化进程,促进农业产业的健康发展。
1.3 研究意义水果采摘是一项传统的农业劳动,随着人口数量的增加和农业劳动力的减少,传统的水果采摘方式已经无法满足市场需求。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究随着城市化和现代化的快速发展,许多人不再生活在农村和种植水果的环境中。
然而,人们对健康食品和新鲜水果的需求不断增加。
因此,市场上出现了许多水果采摘园和销售新鲜水果的商家。
为了方便消费者采摘所需水果,设计一款便携式水果采摘器是非常必要的。
1. 设计目标:便携式水果采摘器主要是为了满足市场对新鲜水果追求的需求,让消费者更加轻松快捷地采摘到所需水果。
该采摘器的设计目标如下:a. 便携性:能够便捷地携带,轻松采摘。
b. 轻量化:重量不超过500克,方便携带和使用。
c. 稳定性:稳定性高,避免使用中水果掉落或采摘者失去平衡。
d. 可拆卸式:方便使用者拆卸整理清洗,延长使用寿命。
该便携式水果采摘器的设计采用可重组设计,主要由以下几个部分组成:a. 采摘装置:由一根细长的杆子和一个开口局部的采摘头部组成。
b. 手把:采摘器上部设有手把,使用户更加方便地控制采摘器的移动。
c. 固定部分:由夹子和固定螺丝组成,用于固定采摘器的主杆和采摘头部。
a. 采摘头部设计:采摘头部是该产品最重要的设计部分。
合理地设计采摘头部可提高采摘效率并降低劳动强度。
为此,采用了一种特殊的设计,即开口局部的头部设计。
头部的开口可以确保人们在采摘时能够轻松地将水果夹住,而不用担心水果被压碎。
头部还可以旋转,从而使采摘的水果更容易脱离采摘器。
b. 手把设计:手把作为产品的身体部分起到把手的作用,使使用者可以更好地控制采摘器的移动方向和位置,从而保证采摘的准确性。
此外,手把还有一个旋转设计,这意味着操作者不必顾及采摘器的采摘角度而失去平衡。
c. 固定部分设计:固定部分是连接采摘头部和采摘杆的部分。
由于采摘头部的重量非常轻,为了使其更加稳定,固定部分是必不可少的。
夹子设计使得采摘器的整个结构更加坚固,固定螺丝则保证了采摘器部件的牢固连接。
整个采摘器可以使用铝、铁、塑料等材料制作。
材质的选择应该使产品既轻巧又坚固。
例如,手把和固定部分可以使用强度高、重量轻的铝材制作,而采摘头部可以使用塑料材料制作,以确保其轻便且不易受损。
便携式水果采摘辅助装置的设计与研

便携式水果采摘辅助装置的设计与研究DesignandResearchonaPortableElectricFruitPickingDevice叶 剑 沈家栋 何东伟(同济大学浙江学院机械系,嘉兴 314000) 摘 要牶对几种常见的水果生长数据进行了调研,主要包括水果生长的位置分布、单个水果的重量和水果悬挂姿态。
通过分析水果生长位置和悬挂姿态对采摘动作的影响,对当下果园里常用的几款辅助采摘设备及其各自的优缺点进行了调查和研究。
基于此,设计了一款便携式、适应各种水果悬挂姿态的电动水果辅助采摘装置。
关键词牶水果采摘 调节角度 电动 便携式DOI牶10.16413/j.cnki.issn.1017080x.2022.06.007Abstract牶Severalcommondataaboutthegrowthoffruitareinvestigatedinthispaper,includingthelocationdistribution,thesuspendedpostureandtheweightofasinglefruit.Byanalyzingtheeffectsofthesefactorsonpickingfruit,thispaperstudiesseveralkindsofauxiliarypickingdevicesusedinorchardaswellastheiradvantagesanddisadvantages.Basedontheabovework,thispaperprovidesadesignofhand heldelectricdeviceforfruitpicking,whichcansuitvarioussuspendedposturesoffruit.Keywords牶fruit picking adjustmentangle electric hand held0 引 言我国每年各种水果的产量达数亿吨,一年四季都有大量新鲜水果上市。
便携式水果采摘装置的市场调研及设计思路

DOI :10.16675/14-1065/f.2020.24.068便携式水果采摘装置的市场调研及设计思路□孟凡双摘要:目前市面上的水果采摘器品种繁多,产品价格大相径庭,但大多数体积比较笨重、效率低、普适性差。
面对中小种植户手动采摘的现状,价格低廉的便携式采摘装置更符合其需求。
关键词:水果;便携采摘;市场分析文章编号:1004-7026(2020)24-0159-02中国图书分类号:S225文献标志码:A(广东松山职业技术学院广东韶关512000)1水果采摘装置市场现状市场上存在的水果采摘分两大类。
(1)切割果枝采摘法。
该方法对果树伤害较大,采取的果实直接掉落至地上,很难保证采果的完好率,特别是比较娇嫩的水果。
(2)套果拉拽采摘法。
该方法只适用于坚韧或不宜损坏的水果,采摘效率低且对果树造成的伤害大。
多数便携式水果采摘器要靠手动夹持,双手不间断地高强度劳动极大地制约了劳动效率。
韶关市水果种植面积较大,市场需求对水果生产拉动作用日益明显,极大地调动了农民生产的积极性,促进了水果生产迅猛发展。
九峰镇自然条件优越、资源禀赋,素有“水果基地”的美称,水果种类繁多。
2019年9月24日九峰镇(黄金宗李)入选第九批全国“一村一品”示范村镇名单。
市场上水果采摘机械缺乏地域性且普适性差,不能适用于九峰种植户地域环境与农产品采摘,更不能很好地保护果树和水果。
要想保护果树和果子,目前采取最多的是人工采摘,存在效率低、成本高、风险大等问题。
2水果采摘器市场调研2.11111调研目的近年来,脱贫攻坚一直是政府工作的重要内容,在2020年政府工作报告中,脱贫攻坚依然是“三农”领域高频词汇。
面对“三农”问题,韶关市立足资源优势,发展区域农业,希望能够借助粤港澳大湾区建设的“东风”,抓住机遇,加快韶关发展速度。
发展特色农业是实现农业现代化的必然要求。
应借助特色农业助力韶关农业发展,充分凸显韶关作为粤港澳大湾区“菜篮子”生产及流通服务作用。
可伸缩便携式刺梨采摘器的设计

摘要:随着人们对刺梨有效成分食用与药用价值的深入研究,云贵刺梨种植已形成产业化与规模化。
但目前这些地区的刺梨采摘仍以手工方式为主,即在采摘时用戴手套的手直接抓紧刺梨,用力将其从树枝上摘下。
这种作业方式,刺梨树枝上的刺可能穿透手套扎入皮肤,使人受伤;采摘较高远树枝上的刺梨时,需用力把树枝拽回到身前进行采摘,树枝易被折断,影响来年产量;采摘效率较低,劳动强度较大。
基于此,设计了一种可伸缩便携式刺梨采摘器,以解决手工采摘刺梨存在的不足,并为相关果蔬采摘器的设计提供一定的技术参考。
关键词:刺梨;采摘器;可伸缩杆;便携式0 引言刺梨是云贵高原等地区的天然野果,贵州的刺梨品种最多,果实产量居全国之首,刺梨树高1~2.5 m,果实呈扁球形或圆锥形,表面布满毛刺。
由于风味独特并且具有较高的营养价值和医用价值,刺梨深受广大消费者喜爱,在四川、河南等地有大量的人工种植,至今仍广泛分布于山区。
但是由于刺梨生长在带刺的刺梨树枝上,树枝生长又参差不齐,部分树枝直立生长,部分树枝则向四周生长,通常一株刺梨树呈“笼状”,刺梨本身表面又布满毛刺,这些都给刺梨的采摘收获工作带来了巨大的不便。
在丰产刺梨的贵州山地,目前还是采用人工戴上较厚的防刺手套进行采摘,这种手工作业方法不仅耗费过多的人力,而且工作效率低,不能满足现代产业化的作业要求。
近年来,刺梨产业发展迅速,多用于果汁饮品、化妆品,刺梨中有效成分的药用价值及其基础研究也开展得如火如荼。
国内外学者对刺梨的研究主要集中在刺梨种植管理及养护、刺梨产品的加工和保存、刺梨中一些成分在临床医学中的应用、刺梨生物活性成分的开发等方面,对刺梨采摘方面相关设备的研究相对较少,导致切实可用的采摘器捉襟见肘。
现有的一种便携式变径球形刺梨采摘器,携带方便,且据报道能有效进行刺梨采摘,其在采摘过程中也能一定程度上避免损坏刺梨树枝,但其伸缩杆调节长度太短,不利于特殊高度和特殊地形下的刺梨采摘。
贵州大学罗兵、张建敏基于TRIZ和AD理论设计出耙型刺梨采摘机,从其工作原理可见,该刺梨采摘机采摘中易折断刺梨树枝丫,导致来年刺梨减产。
《2024年智能移动式水果采摘机器人系统的研究》范文

《智能移动式水果采摘机器人系统的研究》篇一一、引言随着科技的发展和农业现代化的推进,智能移动式水果采摘机器人系统逐渐成为农业领域的研究热点。
该系统能够有效地解决传统人工采摘水果的难题,提高采摘效率,降低劳动强度,并减少果实的损伤率。
本文旨在研究智能移动式水果采摘机器人系统的设计原理、技术实现及其应用前景。
二、系统设计原理智能移动式水果采摘机器人系统主要由移动平台、机械臂、视觉识别系统和控制系统等部分组成。
其中,移动平台负责在果园内自主导航和移动,机械臂负责执行采摘动作,视觉识别系统用于识别和定位果实,控制系统则负责整个系统的协调和控制。
1. 移动平台设计移动平台是智能移动式水果采摘机器人系统的基础,主要采用轮式或履带式结构。
为保证在复杂地形和不同果树下灵活移动,需具备较高的机动性和稳定性。
同时,为保证电池续航能力,还需优化电池管理系统。
2. 机械臂设计机械臂是执行采摘动作的关键部件,需具备较高的灵活性和精度。
设计时需考虑果实的位置、大小、形状等因素,以确保采摘过程中果实不受伤。
此外,为适应不同种类水果的采摘需求,还需具备多用途的末端执行器。
3. 视觉识别系统视觉识别系统是智能移动式水果采摘机器人系统的“眼睛”,主要用于识别和定位果实。
通过图像处理和机器学习等技术,实现对果实的准确识别和定位。
为提高识别速度和精度,还需对算法进行优化。
4. 控制系统控制系统是整个系统的“大脑”,负责协调和控制各部分的工作。
通过传感器、控制器和执行器等设备,实现对移动平台、机械臂和视觉识别系统的控制。
为保证系统的稳定性和可靠性,还需对控制算法进行优化。
三、技术实现智能移动式水果采摘机器人系统的技术实现涉及多个领域的知识和技术,包括机械设计、电子技术、计算机视觉、人工智能等。
在实际应用中,需根据具体需求和条件,选择合适的技术和方法进行实现。
同时,还需对系统进行反复测试和优化,以提高其性能和稳定性。
四、应用前景智能移动式水果采摘机器人系统具有广阔的应用前景。
一种柑橘采摘器的研究与设计

一种柑橘采摘器的研究与设计1. 引言1.1 研究背景柑橘是一种重要的水果,在许多国家都有广泛种植。
柑橘的采摘却一直是一个繁重而耗时的工作,传统的采摘方法不仅效率低下,而且劳动强度大。
随着农业机械化的发展,研发一种高效、节省人力成本的柑橘采摘器成为了迫切的需求。
目前市面上已经有一些柑橘采摘工具,但它们存在着一些缺陷,比如采摘效率低、对果实容易造成伤害等问题。
设计一种更加高效、环保、人性化的柑橘采摘器成为了当前研究的主要方向之一。
本文将对柑橘采摘器进行深入研究和设计,旨在提高柑橘采摘的效率和质量,减轻劳动强度,并为农民提供更好的工具支持。
通过对现有柑橘采摘工具的现状分析,探讨柑橘采摘器的设计原则,设计合理的结构并进行性能测试,最终改进现有柑橘采摘器,为农业生产做出贡献。
1.2 研究意义柑橘采摘器在柑橘种植领域中具有重要的意义。
柑橘是我国重要的经济作物之一,其产量的提高对于农民的收入和国家的农业经济发展具有重要意义。
而柑橘采摘作为柑橘生产的一个重要环节,影响着柑橘的质量和产量。
设计一种高效、便捷、环保的柑橘采摘器对于提高柑橘采摘效率、减轻劳动强度、保障柑橘品质都具有重要意义。
随着农业现代化的进程,传统的人工采摘方式已经无法满足大规模的柑橘产量需求。
研究和设计一种先进的柑橘采摘器可以提高生产效率,降低生产成本,推动柑橘生产方式迈向智能化和高效化。
柑橘采摘器的研究与设计也为农业机械化发展提供了范例,具有一定的示范作用。
研究和设计一种高效、便捷的柑橘采摘器不仅具有重要的经济意义,还有利于推动柑橘产业的现代化和可持续发展。
本文将探讨柑橘采摘器的设计与研究,为柑橘产业的发展提供技术支持和参考。
2. 正文2.1 柑橘采摘工具现状分析柑橘采摘工具是农业生产中不可缺少的工具之一,它对柑橘的采摘效率和采摘质量有着重要影响。
目前市面上存在的柑橘采摘工具主要包括手工采摘工具和机械采摘工具两大类。
手工采摘工具主要是采摘篮、剪刀和梯子等,操作简单但效率低下,一方面耗时耗力,另一方面易损坏柑橘皮肤,影响品质。
便携式水果采摘器的设计研究
便携式水果采摘器的设计研究随着社会的发展和人们生活水平的提高,水果已经成为人们日常饮食中不可或缺的一部分。
由于水果生长的地点和高度的限制,很多好吃的水果并不容易采摘到。
为了解决这一问题,研发出便携式水果采摘器成为了一个热门的话题。
本文将针对便携式水果采摘器的设计进行研究,并提出一些具体的设计方案。
一、市场需求分析在一些农村地区,农民在收获水果的时候,由于水果生长的高度较高,因此需要借助梯子等工具来采摘水果。
但是梯子不方便携带,而且在采摘水果的时候也存在很多安全隐患。
便携式水果采摘器也可以在这方面发挥很大的作用。
市场上存在着对便携式水果采摘器的需求,而且这个需求还将会随着人们生活水平的提高而不断增加。
二、设计原则1. 便携性:便携式水果采摘器的设计首要考虑的是便携性。
用户希望能够将采摘器轻松地放入口袋或者包中,方便携带。
2. 稳固性:在使用便携式水果采摘器的时候,用户希望能够感到采摘器的稳定性。
这样一来,用户在使用采摘器的时候能够更加轻松,也可以保障自己的安全。
3. 多功能性:在设计便携式水果采摘器的时候,可以考虑增加一些功能,比如防滑设计、高度可调等功能,来提高采摘器的实用性。
4. 轻便易用:便携式水果采摘器应该尽量减少使用者的体力消耗,让使用者能够轻松地完成采摘任务。
三、设计方案一种常见的便携式水果采摘器设计方案是由一个伸缩杆和一个夹具组成。
这种设计方案将杆子伸出来,夹具夹住水果,然后通过用户的手动操作,将水果采摘下来。
这种设计方案便携性较好,但是存在着稳定性较差,用户需要花费一定的体力来完成采摘任务的问题。
另一种设计方案是采用夹式设计,凭借装在便携式水果采摘器上的装置来将水果夹取到。
这种设计方案克服了伸缩杆稳定性不佳的问题,同时用户可以轻松地夹取到水果,省去了手动操作的麻烦。
还有一种设计方案是将便携式水果采摘器设计成一种类似于撑杆跳的结构,用户可以通过压缩弹簧的方式将水果从树上弹下来。
这种设计方案在一定程度上减小了用户的体力消耗,同时使得水果采摘更加轻松。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究便携式水果采摘器的概念并不新鲜,早在几年前就已经有了一些相关的设计和研发。
由于技术和材料的限制,以及市场需求的不断变化,目前市面上依然缺乏一款真正符合人们需求的便携式水果采摘器。
有必要深入研究便携式水果采摘器的设计,并且提出创新的想法和方案,以满足人们对水果采摘的需求。
便携式水果采摘器的设计需要考虑到人们的使用习惯和实际需求。
一般来说,水果采摘需要爬树或者使用长杆,因此便携式水果采摘器需要具备一定的伸缩功能,以适应不同高度的水果树。
便携式水果采摘器需要具备一定的采摘性能,可以轻松、快速地采摘水果,并且不会损坏水果本身。
便携式水果采摘器的设计需要考虑到便携性,要方便携带和使用,重量要轻,操作要简单。
便携式水果采摘器需要考虑到材料和安全性,要选择环保材料并且具备一定的安全性能,以保障用户的使用安全。
在设计便携式水果采摘器的过程中,我们可以借鉴一些先进的科技产品的设计理念和技术手段。
可以使用伸缩式杆和专利的采摘结构,以实现便携式水果采摘器的伸缩功能和采摘效果。
可以使用轻质材料,比如碳纤维和铝合金,以实现便携式水果采摘器的轻量化设计。
可以借鉴一些智能产品的设计理念,比如可以加入智能感应和控制系统,以实现便携式水果采摘器的智能化设计。
这些先进的设计理念和技术手段可以为便携式水果采摘器的设计提供一些创新的思路和方向。
除了技术和设计手段,便携式水果采摘器的研发还需要考虑到市场需求和用户反馈。
需要对市场上已有的水果采摘器进行调研分析,了解其优缺点和用户需求,以便找到切入点和突破口。
需要进行用户需求调研,了解用户对于便携式水果采摘器的具体需求和期望,以便明确产品的定位和特色。
需要进行用户反馈的持续跟踪和分析,及时调整产品设计和性能,以确保产品符合用户的实际需求。
便携式水果采摘器的设计研究是一个复杂而又具有挑战性的任务。
在设计过程中,需要充分考虑到人们的使用习惯和实际需求,借鉴一些先进的科技产品的设计理念和技术手段,以及调研市场需求和用户反馈。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究随着人们对健康与生活质量的追求,采摘新鲜水果成为了一种流行的休闲活动。
传统的水果采摘往往需要人们爬上树或者使用梯子等工具,不仅麻烦而且有一定的安全隐患。
为了解决这个问题,我们设计了一种便携式水果采摘器。
便携式水果采摘器的设计思路是将一个小型的机械臂装在一个手持设备上,通过控制按钮或者遥控器来操作机械臂的运动。
机械臂上装有一对钳子,在采摘水果时可以将钳子夹住水果,然后通过机械臂的运动将水果放入采摘袋中。
在设计便携式水果采摘器时,我们考虑了以下几个因素:1. 机械臂的灵活性:为了适应不同树木的高度和形状,机械臂需要具有一定的灵活性。
我们采用了可伸缩的材料,可以根据需要调节机械臂的长度和角度。
2. 钳子的抓力:为了确保钳子能够牢固地抓住水果,我们在钳子的设计上采用了一种特殊的材料,具有较强的抓力,同时能够保护水果的表面不受损坏。
3. 采摘袋的容量:考虑到水果的大小和数量的不同,采摘袋需要有足够的容量。
我们设计了一个可调节大小的采摘袋,可以根据需要增加或减少容量。
4. 操作的便利性:为了方便用户的操作,我们在手持设备上设置了几个按钮,可以通过按钮来控制机械臂的运动。
我们还可以通过蓝牙技术将手持设备与机械臂连接起来,通过手机等设备来遥控操作。
通过这些设计,便携式水果采摘器可以帮助人们更方便、更安全地采摘水果。
用户只需要拿起手持设备,操作机械臂即可完成采摘的过程,不需要再使用梯子等工具,大大降低了意外风险。
机械臂的灵活性和钳子的抓力可以适应不同的情况,保证了采摘的效果。
便携式水果采摘器还存在一些问题需要解决。
机械臂的重量可能会对用户的使用造成一定的负担,需要在设计上考虑减轻重量。
钳子的设计也需要进一步改进,以确保能够稳定地抓住水果。
便携式水果采摘器的设计研究是为了解决传统采摘方式带来的麻烦和安全隐患。
通过灵活的机械臂和强力的钳子,用户可以更方便、更安全地采摘水果。
还需要进一步的改进和优化,以提供更好的使用体验。
草莓采摘机设计研究

草莓采摘机设计研究引言草莓是一种广受欢迎的水果,其味道鲜甜可口,受到了人们的喜爱。
草莓的采摘工作一直以来都是一个辛苦且费时的任务,需要大量的人力成本和时间。
为了解决这一问题,许多研究人员开始着手设计和研发草莓采摘机,以便提高采摘的效率和质量。
本文将就草莓采摘机的设计研究进行探讨,分析其设计原理、技术特点和市场潜力。
一、草莓采摘机的市场需求和发展现状随着人们生活水平的提高和消费观念的改变,草莓的消费量也在不断增加。
现有的采摘方式无法满足市场的需求,特别是在大规模上的生产中。
传统的草莓采摘方式通常采用人工采摘,这种方式无论是从成本还是效率上都存在着很大的不足。
为了提高采摘的效率和质量,草莓采摘机成为了市场上的一种需求。
目前,国内外一些公司和科研机构都在进行草莓采摘机的研发工作。
一些高校也在相关领域进行着科研合作。
这些研发工作涉及到机械设计、传感技术、控制技术等多个方面。
随着技术的不断进步,草莓采摘机的功能和性能也在不断提高。
目前市场上依然缺乏适用于大规模生产的高性能草莓采摘机,因此在研究和设计上还有很多挑战和机遇。
二、草莓采摘机的设计原理草莓采摘机是一种专门用于采摘草莓的机械设备,其设计原理主要包括机械结构、传感控制和作业性能等几个方面。
1. 机械结构草莓采摘机的机械结构是其最基本的设计要素之一。
一个合理的机械结构方案将直接影响到机器的稳定性、耐用性和采摘效率。
一般来说,草莓采摘机的机械结构包括机架、移动装置、采摘装置和储存装置等几个部分。
移动装置用于使机器能够在菜地内快速移动,采摘装置用于将草莓从植株上采摘下来,储存装置用于将采摘下来的草莓存放起来。
2. 传感控制草莓采摘机的传感控制是其智能化的核心。
通过激光传感器、摄像头等传感装置,机器可以实时地感知到周围环境和植株的位置,实现自动导航和识别。
通过控制系统对机器进行精准的控制,使其能够完成采摘任务。
传感控制的设计不仅需要考虑到其精度和稳定性,还需要兼顾到其实时性和安全性。
拇指式小型草莓采摘器设计

拇指式小型草莓采摘器设计
一、设计背景
草莓是一种十分受欢迎的水果,但采摘草莓却是一项费时费力的工作。
传统的采摘方法往往需要弯腰、蹲下来逐个采摘,不仅效率低下,还容易导致腰部疼痛等问题。
设计一款便捷高效的草莓采摘器对于改善采摘效率和减轻采摘者的劳动强度具有重要意义。
二、设计目标
1. 设计一款小型、轻便的草莓采摘器,方便携带和使用。
2. 提高采摘效率,减少采摘时间。
3. 减轻采摘者的劳动强度,避免因长时间弯腰蹲下而导致的不适。
三、设计原理
本设计主要采用机械手臂伸缩工作原理,通过手动操作,可以轻松地将采摘器伸入草莓丛中,轻轻一挤,即可将草莓采摘下来。
设计一个可装备在手指上的操作按钮,方便采摘者操纵采摘器进行采摘工作。
四、设计要点
1. 机械手臂的设计:采用轻质材料制作伸缩机械手臂,保证采摘器的轻便和便捷性。
2. 采摘器的设计:采用柔软材质的采摘器头,具有一定的韧性和柔软度,能够适应不同形状和大小的草莓,确保采摘的成功率。
3. 操作按钮的设计:设计一个小巧的操作按钮,可以装备在手指上,方便采摘者进行手动操控。
五、产品结构
1. 机械手臂:由轻质合金材料制成,伸缩自如。
2. 采摘器头:采用柔软的硅胶材料制成,具有一定的韧性和柔软度。
3. 操作按钮:小巧便捷,可装备在手指上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
便携式水果采摘器的设计研究作者:管红光谢进刘笑姜修坤
来源:《科技视界》2019年第12期
【摘要】本项目以带柄类水果采摘为研究对象,在对目前类似机器的调查研究中,大多数都存在体型大、结构复杂、不方便携带、造价昂贵、成本高等问题。
针对这些问题,我们设计研究出了一款便携的、采摘灵活的水果采摘机。
此机器主要由采摘工作部分、控制部分以及其他结构部件组成。
当电机工作起来时便会带动可移动拖碗,让拖碗合拢,让刀片对果柄进行切割,最终完成采摘。
此机器不仅工作效率高,且成本低、实用,并且也可用于其它果品的采摘。
【关键词】水果采摘;便携;灵活高效
中图分类号: S225 文献标识码: A 文章编号: 2095-2457(2019)12-0030-002
DOI:10.19694/ki.issn2095-2457.2019.12.013
【Abstract】This project takes fruit picking with handle as the research object. In the investigation and research of similar machines, most of them have the problems of large size,complex structure, inconvenience to carry, high cost and so on. To solve these problems, we designed and developed a portable and flexible fruit harvester. The machine is mainly composed of picking working part, control part and other structural parts. When the motor works, it will drive the movable bowl, let the bowl close, let the blade cut the fruit handle, and finally complete the picking. This machine not only has high efficiency, low cost and practicality, but also can be used
for picking other fruits.
【Key words】Fruit picking; Portable; Flexible and efficient
0 引言
水果采摘器的研究始于上世纪70年代末,国内外专家通过近三十年的研究发表了大量的研究论文和报告,同时也相应的开发了各种原型机。
由于国内机械化采收存在着效率不高、容易损伤果实及产量损失大等问题。
并且在水果产业中,并没有针对水果采摘的机器出现,因此有必要研究一款专用于水果的采摘机。
采摘作业质量直接影响水果的储存、加工和销售,从而最终影响到水果的存储、加工和销售,从而最终影响市场价格和经济效益。
但由于国内水果的采摘作业环境和操作的复杂性,水果采摘的自动化程度依然很低,目前国内的水果采摘作业基本上还是手工完成,并且高枝水果的采摘还带有一定的危险性,因此机械正在逐渐代替人们原始的劳动工具和原始的劳动方法,而且现代农业正呈现着前所未有的发展潜力,因此应应用所学的知识去分析、解决该类问题。
1 整机结构与工作原理
1.1 整机结构
该便携式水果采摘器主要由伸缩杆、步进电机、活动滑块、可移动杆、可移动拖碗、以及刀片等部件组成。
在需要采摘水果时,步进电机带动丝杠使可移动杆运动,带动拖碗合拢,刀片对果柄进行切割。
1.2 工作原理
水果如何夹持是一个很重要的问题,如果夹的太松,在采摘水果的时候就会不顺利;如果夹的太紧就会使果肉损伤。
我们用两个托碗来夹持固定水果以便于采摘。
同时我们在托碗中放置了柔性海绵,不仅可以避免碰伤水果,同时也可以增大摩擦力使水果被夹持得更稳。
1.固定拖碗;
2.固定杆;
3.导轨;
4.步进电机;
5.伸缩杆;
6.电源及电路盒;
7.活动滑块;
8.丝杠;
9.可移动杆; 10.可移动拖碗
1.可移动拖碗;
2.柔性海绵;
3.固定拖碗
2 关键部件的设计
2.1 采摘(断柄)装置的设计
安装在可移动托碗顶部的刀刃和刀槽在步进电机动力的带动下进行合拢将果柄切断,水果的果柄被切断后,水果就留在拖碗中。
托碗横向移动的速度在0.03m/s左右,这样在采摘水果的过程中可以对要切割的果柄位置进行小范围调整。
1.刀刃;
2.刀槽
2.2 传动装置的设计
整个装置当需要采摘水果时,由步进电机提供动力。
步进电机带动丝杠进行旋转,从而使得可移动杆在导轨上左右移动。
来拖动拖碗的开合,对果柄进行切割。
3 采摘力的确定
假设水果的直径为φ,夹紧块的反作用力为f2,摩擦力为f,摩擦因数为μ,水果重力为G。
由平衡条件得
式中f2——果实对夹持块的反作用力。
夹紧机构与水果相接触的那一侧可以贴上一层海绵,海绵与水果的摩擦因数μ取0.5,
取G=1.47N,则F2=0.8N,即F2≥0.8N当则能保证水果不会掉下。
实验表明对水果直径方向压缩2 mm所需的力大于0.8 N,因此水果直径方向变化2 mm而不会损伤其果肉,则可以采用限定这个压缩量用于采摘。
4 总结
水果是我们健康的保护伞,我们在挑选水果时一定会挑选不磕不碰的新鲜水果,该水果采摘机正是契合了这两点,既能保护果子在采摘时不受磕碰,又能不损伤果树。
此机器不仅仅可以用于香梨、苹果的采摘,还可应用于其他与水果同体积外形的水果,使用范围还是比较广的,因此市场前景较为可观。
【参考文献】
[1]便携电动式水果采摘机设计[N].中国农机化学报,2015-1.
[2]便携电动式水果采摘机设计[J].南方农业,2017,9.
[3]农业机械化对区域农业的影响[J].贵州农业科学,2012,4.
[4]水果采收机械的现状与发展[J].广东农业科学,2012,3.
[5]小型可升降苹果采摘机的设计[J].农机化研究,2013,3.
[6]果蔬采摘机器人研究进展与展望[N].农业机械学报,2006.
※基金项目:大學生创新、创业训练计划项目(201810757008)。
作者简介:
管红光(1990—),本科生,新疆轮台县人。