声音导引系统(B题)
保研推免申请个人陈述终极版-个人陈述保研

保研推免申请个人陈述终极版:个人陈述保研篇一我叫**,来自**省**市,现为**大学**学院**专业的一名学生。
现将我的学习情况、科研经历、学生工作和读研规划陈述如下:首先,学习情况。
自入校以来,在学习上我刻苦钻研,成绩一直名列前茅。
本科期间的专业课程和专业实验,我基本上每门都达到90以上,具有扎实的理论基础和较强的动手能力,近三学期的综合测评成绩都是全院第一名;曾荣获南京理工大学优秀学生特等奖学金三次,一、二、三等奖学金各一次;连续两次荣获国家励志奖学金;被授予“江苏省三好学生”、“优秀团员标兵”等荣誉称号。
大学三年的综合成绩在电类专业的290人中排名第一,成功获得免试推荐研究生资格。
经过大学三年的学习,我已经掌握了通信与信号处理的基本理论知识和实验技能,具有一定的科研能力。
其次,科研经历。
我一直注重创新能力和动手能力的培养与锻炼,曾参加过数学竞赛、物理竞赛和数学建模竞赛,并取得了优秀的成绩。
大三,参加了本科科研训练,研究课题是《基于TMS320DM642的电子导盲技术的研究》,这次科研训练使我的创新意识、创新能力和专业能力都得到了很大的提高。
2020年9月,参加全国大学生电子设计大赛,选做B题《声音导引系统》,荣获江苏省一等奖。
培训期间,在导师的指导下,掌握了单片机软编程、Protel软制版、信号采集与信号调理电路等相关技术。
这些都为我今后做科研奠定了扎实的基础。
再次,丰富的社会实践使我的大学生活更加精彩。
我曾任职校学生会学习部副部长、院青协活动部部长、班级班长(是我院第一位女班长),现任年级学生会副主席。
我兢兢业业,认真负责,出色的工作得到了老师和同学们的认可,曾被授予“优秀学生干部”、“优秀团支部干部”的荣誉称号。
从这些学生工作中,我懂得了热情、坚持与责任的重要性,我想这些经历在今后的科研学习和工作中都会让我受益终生。
最后,我性格开朗,态度端正,做事踏实认真,并且具有浓厚的科研兴趣。
我所学专业——信息对抗技术属于国防专业,在学习中,我对无线电导航产生了浓厚的兴趣。
B._声音导引系统

声音导引系统(B题) 主要用到的器件:1)MIC及相关放大调理电路2)喇叭及相关驱动电路3)无线收发模块,如nRF24014)小车5)电机及NEC指定的驱动芯片及其电路6)其他可扩展之器件,如LCD显示等基本思路整个系统分为两部分,声源定位及车体运动控制1)声源定位根据题目要求中给出的图示,定位声源有两种方法:图1 系统示意图S可移动声源a)可以通过计算声源与A、B、C中任意两点之间的距离的方法来确定声源与A、B、C的相对位置b)可以通过计算声源发出的声音被A、B、C接收到的时间差来确定声源与A、B、C的相对位置前一种方法要求声源与接收器之间做同步,从而确定声音从发出到接收之间的时间。
同步可以通过使用无线通信发送特定指令的方式来做。
当声源需要确定自己的位置时,发射特定指令通知接收端启动计时。
该方法需要考虑无线通信带来的声音发射和接收之间的时间误差,实际测定这个误差。
后一种方法方法不需要在声源和接收器之间做同步,相对简单一些,但是位置的计算相对复杂一些。
下图是三个接收器接收到波形的示意图。
通过测量从参考时刻开始到接收到完整声音的时间Count_Time,可以得出三个时间差,根据三个时间差可得出相对位置。
(公式这里不列出,推导方法不复杂)在本部分中,无论采用哪种方法,硬件主要包含两部分:声音发送和接收声音的发送相对简单,采用常规音频放大电路即可完成。
如,采用61板板载之音频电路即可声音的接收电路的处理,大致思路如下:三个接收点的电路是一致的。
由于接收点之间的距离在1m左右,所以接收电路的输出可做进一步处理,比如加232增加传输距离等以上的处理是在不考虑噪音污染的情况下的处理思路。
若环境噪音比较严重,可考虑在接收端加入特定频率的滤波或解调电路。
2)车体运动控制车体运动控制主要涉及到NEC的芯片的使用,这里不再赘述。
声音导引系统(B题)
编号:B甲1043声音导引系统(B题)学校:山东大学参赛队员:刘树林赵洋孙建凯指导老师:陈言俊秦峰王延伟文稿辅导老师:陈言俊声音导引系统(B题)摘要:本文介绍以AT89S52单片机为核心的智能声音导引小车系统,整个系统使用两片AT89S52单片机实现移动声源与三个基站的无线通讯。
电机驱动部分采用NEC公司生产的MMC-1驱动芯片级联L298构成。
声源部分采用无源蜂鸣器发出频率为16KHz的声音,三个基站分别安装压电陶瓷片检测蜂鸣器发出的声音,并将检测到得数据通过无线数传模块A7105传送到移动声源上的主控单片机。
主控单片机据此调整小车的运行。
实现声音导航。
ABSTRACT:This article introduces the AT89S52microcontroller as the core of the Smart Sound Guided Vehicle System,the entire system uses two AT89S52MCU moving sound source and the three base stations in wireless communication. Motor-driven part of the adoption of NEC's production of MMC-1cascade L298driver chip composition.Buzzer sound source part of the passive voice to issue a frequency of16KHz,three base stations were installed electrets detected buzzer sounds,and was detected in the data transmitted through the wireless module to the moving sound source master microcontroller.Host microcontroller to adjust the operation of car.To achieve voice guided navigation关键词:声音导航,无线通讯,NECK eywords:Voice guided navigation,wireless communication,NEC1.总体模块方案的论证与比较1.1主控部分的选择与论证方案(一):声源的主控核心采用AT89S52单片机,分别安装在移动声源部分和基站接收部分。
大学生电子设计竞赛题目方向

大学生电子设计竞赛题目方向1)仪器仪表方向:音频信号分析仪:2021年a题数字取样示波器:2021年c题简易频谱分析仪:2021年c题简易逻辑分析仪:2021年d题低频相位测量仪:2021年c题数字存储示波器:2001年b题频率特性测量仪:1999年c题数字工频多用表:1999年b题简易数字频率计:1997年b题轻便rlc测量仪:1995年d题仪器仪表方向训练重点:内容:包含信号产生、采集、存储、分析、处理、显示、控制等信号处理环节中的大部分或全部。
类型:分成时域分析处置和频域分析处置两大类。
难点:强调速度、处理能力、显示性能等。
需要通过构建新技术硬件平台及运用信号处理算法来实现。
系统中的部分任务需要在训练阶段完成。
训练:dds任一信号产生、高速/宽带演示电路、滤波器、高速adc/dac取样与录像、高速数据存储(fifo)、算法(fft、卷积、有关、数字滤波等)、表明技术(lcd、绘图、实时曲线等)、弱实时性mammalian多任务软件设计、fpga/cpld与单片机的USB、仪器仪表原理、各类电参数测量、等内容。
2)电路系统方向:宽带直流放大器:2021年c题轻便程控滤波器:2021年d题正弦信号发生器:2021年a题宽带放大器:2021年b题压往下压l/c振荡器:2021年a题任一波形发生器:2001年a题轻便测量放大器:1999年a题录音与录像系统:1999年e题新颖信号源制作:1995年b题电路系统方向训练重点:内容:偏重概念和指标。
涉及到各类经典单元模块电路,及其基本概念、基本原理和新实现方法、性能指标测试方法等。
类型:分成功能型(轻在新方法)和指标型(轻在崭新设计思路)两大类。
难点:特别强调指标,通常经典设计、通用型ic就是难以完成的。
训练:(程控)放大器、(程控)滤波器、振荡器、dds任一信号产生、基本演示调理电路、电性能指标测试(电阻、增益、频宽…)、拓展设计思路等。
3)功率电子方向:光伏发电演示装置:2021年a题电能搜集充电器:2021年e题开关型稳压电源:2021年e题数控恒流源:2021年f题三相正弦变频电源:2021年g题高效d类放大器:2001年d题直流稳定电源:1997年a题实用音频放大器:1995年a 题功率电子方向训练重点:内容:小电流、大功率、三相电、斩波、dc-ac低电压、dc-dc开关电源、变频驱动、class-d功放、光伏发电、并网、mppt算法,等电力电子领域的新技术。
基于AT89S52的声音导引系统设计

基于AT89S52的声音导引系统设计作者:冯洋来源:《现代电子技术》2010年第08期摘要:介绍了声音导引系统的设计与实现。
该系统包括单片机系统电路、声源调制电路、接收器电路、步进电机驱动电路、声光提示电路等。
采用两块单片机(AT89S52)分别作为可移动的声源的检测和控制核心。
由单片机1根据三个接收器接收声源信号的先后时间确定声源当前的位置,再由无线发送给单片机2。
单片机2利用ASSP芯片(型号MMC-1)控制电机的转速实现可移动声源的运动控制,并且移动到位后给出声光提示。
该电路设计方法简单、功耗低、性价比高,经调试可实现声音导引系统的精确控制。
关键词:单片机; 声音导引; 移动声源; ASSP芯片中图分类号:TP271文献标识码:B文章编号:1004-373X(2010)08-0182-04Design of Voice Guidance System Based on AT89S52FENG Yang(Weinan Teachers University, Weinan 714000, China)Abstract:The design and implementation of the voice guidance systerm are introduced. The system consists of SCM system circuit, sound source modulation circuit, receiver circuit, stepping motor drive circuit and acoustoopic cuecircuit.Two single chip computers (AT89S52) are respectively used as the mobile sound source detection and control cores. The current location of the sound source is determined by MCU1 according to the time sequence of receiving a sound source signal by three receivers, and then is sent to the MCU2 through radio. MCU2 uses ASSP chip microcontroller (model MMC-1) to control the motor speed to achieve the motion control of mobile source, and sends out an acoustooptic cue when arriving at the designated place. The circuit is simple and haslow power consumption and high cost-performance ratio. The precise control of the voice guidance system can be realized by debugging.Keywords:single chip computer; voice guidance; moving sound source; ASSP chip0 引言2009年全国大学生电子设计大赛的B题是“声音导引系统”;题目要求设计并制作一声音导引系统声音导引系统有一个可移动声源S,三个声音接收器A,B,C,声音接收器之间可以有线连接。
声音导引系统(B题)

声音导引系统(B题)摘要:系统采用两片STC89C52单片机分别作为主从控制器,电动小车搭载蜂鸣器构成可移动声源,声音信号被驻极体话筒感知后再加以后续放大、滤波,构成声音检测模块。
从机控制声源发声,主机接收到声音信号后经无线通信向其发出距离误差信号,从机对该信号进行处理,采用差值控制法控制电动小车运动,从而实现对声源的导引功能。
经测试,系统运行时,声源最大平均速度能达到12.8cm/s,最小定位误差小于1.0cm。
当声源以平均速度大于10cm/s速度运行时,任意时刻不会超过直线Ox左侧2cm。
此外,系统还加入了液晶显示、语音提示等人机交互界面。
关键词:STC89C52 声音检测差值控制法声音导引目录1.系统设计 (4)1.1设计任务与要求 (4)1.2设计分析 (4)1.3各模块方案论证和选择 (4)1.3.1运动平台的选择 (4)1.3.2控制器模块 (4)1.3.3电机驱动模块 (4)1.3.4 发声模块 (4)1.3.5 声音接收模块 (5)1.3.6 无线通信模块 (5)1.3.7 速度检测模块 (5)1.3.8 数据显示模块 (5)1.3.9 声光提示模块 (5)1.4小结 (5)2.系统的硬件实现 (6)2.1电机驱动电路 (6)2.2发声模块电路 (6)2.3声音接收电路 (6)2.4速度检测电路 (6)2.5无线通信电路 (7)3 理论分析与计算 (7)3.1控制策略分析 (7)3.2控制理论计算 (7)4.系统的软件设计 (8)4.1主程序 (8)4.2距离测量子程序 (8)4.3无线通信子程序 (8)4.4电机驱动子程序 (8)5. 系统测试 (8)5.1测试仪器 (8)5.2系统整体测试数据 (8)5.2.1基本部分测试 (8)5.2.2发挥部分测试 (9)5.3系统整体测试结果分析 (9)6 结论 (9)参考文献: (10)附录一:使用说明 (11)附录二:元器件清单 (12)附录三:电路原理图及印制版图 (13)附录四:程序流程图 (19)附录五:程序清单 (24)1.系统方案设计及论证1.1设计任务与要求设计要求与任务详见2009全国大学生电子设计大赛试题(B 题)。
大学生电子设计竞赛题目方向

大学生电子设计竞赛题目方向1)仪器仪表方向:音频信号分析仪:2007年A题数字取样示波器:2007年C题简易频谱分析仪:2005年C题简易逻辑分析仪:2003年D题低频相位测量仪:2003年C题数字存储示波器:2001年B题频率特性测量仪:1999年C题数字工频多用表:1999年B题简易数字频率计:1997年B题简易RLC测量仪:1995年D 题仪器仪表方向训练重点:内容:包含信号产生、采集、存储、分析、处理、显示、控制等信号处理环节中的大部分或全部。
类型:分为时域分析处理和频域分析处理两大类。
难点:强调速度、处理能力、显示性能等。
需要通过构建新技术硬件平台及运用信号处理算法来实现。
系统中的部分任务需要在训练阶段完成。
训练:DDS 任意信号产生、高速/宽带模拟电路、滤波器、高速ADC/DAC采样与回放、高速数据存储、算法、显示技术、强实时性并发多任务软件设计、FPGA/ CPLD 与单片机的接口、仪器仪表原理、各类电参数测量、等内容。
2)电路系统方向:宽带直流放大器:2009年C题简易程控滤波器:2007年D题正弦信号发生器:2005年A题宽带放大器:2003年B题压控L/C振荡器:2003年A题任意波形发生器:2001年A题简易测量放大器:1999年A题录音与回放系统:1999年E题实用信号源制作:1995年B题电路系统方向训练重点:内容:偏重概念和指标。
涉及到各类经典单元模块电路,及其基本概念、基本原理和新实现方法、性能指标测试方法等。
类型:分为功能型和指标型两大类。
难点:特别强调指标,通常经典设计、通用IC是难以完成的。
训练:放大器、滤波器、振荡器、DDS任意信号产生、基本模拟调理电路、电性能指标测试、开拓设计思路等。
3)功率电子方向:光伏发电模拟装置:2009年A题电能收集充电器:2009年E题开关型稳压电源:2007年E题数控恒流源:2005年F题三相正弦变频电源:2005年G题高效 D 类放大器:2001年D题直流稳定电源:1997年A题实用音频放大器:1995年A题功率电子方向训练重点:内容:大电流、大功率、三相电、斩波、DC-AC逆变、DC-DC开关电源、变频驱动、Class-D功放、光伏发电、并网、MPPT算法,等电力电子领域的新技术。
第九届全国大学生电子设计竞赛题目
总分
30
基本
要求
实际制作完成情况
50
发挥
部分
完成第(1)项
7
完成第(2)项
2
完成第(3)项
7
完成第(4)项
6
完成第(5)项
12
完成第(6)项
5
完成第(7)项
6
其他
5
总分
50
无线环境监测模拟装置(D题)
【本科组】
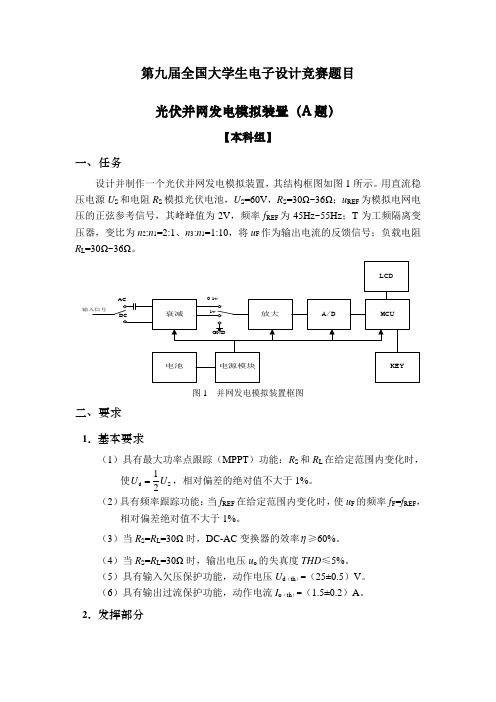
一、任务
设计并制作一个无线环境监测模拟装置,实现对周边温度和光照信息的探测。该装置由1个监测终端和不多于255个探测节点组成(实际制作2个)。监测终端和探测节点均含一套无线收发电路,要求具有无线传输数据功能,收发共用一个天线。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧的距离小于5cm。
(5)可移动声源到达Ox线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
2.发挥部分
(1)将可移动声源转向180度(可手动调整发声器件方向),能够重复基本要求。
(2)平均速度大于10cm/s。
(3)定位误差小于1cm。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧距离小于2cm。
二、要求
1.基本要求
(1)制作2个探测节点。探测节点有编号预置功能,编码预置范围为B~B。探测节点能够探测其环境温度和光照信息。温度测量范围为0℃~100℃,绝对误差小于2℃;光照信息仅要求测量光的有无。探测节点采用两节1.5V干电池串联,单电源供电。
(2)制作1个监测终端,用外接单电源供电。探测节点分布示意图如图1所示。监测终端可以分别与各探测节点直接通信,并能显示当前能够通信的探测节点编号及其探测到的环境温度和光照信息。
全国大学生电子设计竞赛介绍_很有用

二、历届竞赛试题与获奖情况
1、2007年试题及获奖情况 2007年试题及获奖情况
1)试题(本科题A-F),高职题(G-J) )试题(本科题A F),高职题(G A题、音频信号分析仪(主要属于模拟类) B题、无线识别装置(RFID,射频无线电类) 题、无线识别装置(RFID,射频无线电类) C题、数字示波器(数字电路类) D题、程控滤波器(数模结合类) E题、开关稳压电源(电源类) 题、开关稳压电源(电源类) F题、电动车跷跷板(控制类) 题、电动车跷跷板(控制类) G题、积分式直流数字电压表(数字类) 题、积分式直流数字电压表(数字类) H题、信号发生器(模拟类) 题、信号发生器( I题、可控放大器 (模数结合) J题、电动车跷跷板 (控制类) 2 )获奖情况
6、评奖
全国大学生电子设计竞赛分为“赛区奖” 全国大学生电子设计竞赛分为“赛区奖”和“全国奖”两种形式。 全国奖” 1)、各赛区竞赛组委会负责本赛区的评奖工作,赛区奖的评奖等级及各 1)、各赛区竞赛组委会负责本赛区的评奖工作,赛区奖的评奖等级及各 奖项获奖比例由各赛区根据实际情况自行确定。为鼓励学生广泛参与 这一活动,建议各赛区设置“成功参赛奖” 这一活动,建议各赛区设置“成功参赛奖”或类似意义的奖项,凡按 时完成竞赛内容、达到基本要求的参赛队均可发给“成功参赛证书” 时完成竞赛内容、达到基本要求的参赛队均可发给“成功参赛证书” 或类似奖项证书。 2)、赛区评审结束后,各赛区竞赛组委会将本赛区竞赛优秀参赛队的设 2)、赛区评审结束后,各赛区竞赛组委会将本赛区竞赛优秀参赛队的设 计报告及有关材料报送全国竞赛组委会(报送的具体内容及报送时间 另行通知),报送全国竞赛组委会评奖的优秀参赛队数分别不超过本 赛区本科生组和高职高专学生组实际参赛队总数的10%。全国竞赛组 赛区本科生组和高职高专学生组实际参赛队总数的10%。全国竞赛组 委会根据全国专家组的评审结果确定全国一、二等奖,获奖总数原则 上不超过全国实际参赛队总数的8%。对于同一题目,同一所学校获得 上不超过全国实际参赛队总数的8%。对于同一题目,同一所学校获得 全国一、二等奖的队数分别不超过3 全国一、二等奖的队数分别不超过3个。 3)、本科生组和高职高专学生组分别评奖,各设索尼杯。 3)、本科生组和高职高专学生组分别评奖,各设索尼杯。 4)、全国大学生电子设计竞赛设立“赛区优秀组织奖”, 对竞赛组织中 4)、全国大学生电子设计竞赛设立“赛区优秀组织奖” 表现出色的赛区竞赛组委会给予表彰奖励;同时设立“优秀征题奖” 表现出色的赛区竞赛组委会给予表彰奖励;同时设立“优秀征题奖”, 对竞赛征题工作中表现突出的个人给予表彰奖励。
声音导引系统

声音导引系统(B题)摘要:本文描述了声音导引系统的设计原理和实现方法。
该系统由AT89S52单片机控制,通过NEC公司的ASSP电机控制芯片和单片机之间的串行通信实现可移动声源的运动。
主控制器利用不同声音接收器间产生的误差信号,并用无线通信方式将此误差信号传输至可移动声源,引导其运动。
系统最大特点在于软件设计采用层次化、模块化的设计方法,使得复杂数学模型和控制算法得以简化和快速开发。
经调试和测试,系统各项性能参数已基本达到设计指标。
关键词:声音导引 89S52单片机 ASSP芯片算法一、设计任务与要求设计并制作一个声音导引系统,可移动声源运动的起始点必须在Ox线右侧,位置可以任意指定。
利用声音接收器和可移动声源之间的不同距离,产生可移动声源和目标线之间的误差信号,并利用无线通信方式将此误差信号传输至可移动声源,引导其运动。
二、系统整体设计方案比较与选择根据题目要求,系统可以分为两个基本模块,由两片八位单片机分别实现,本声音导引系统的控制关键在于,精确检测误差信号,使可移动声源按要求运动。
系统示意图如下,初步分析设计方案:方案一、在可移动声源向Ox线逼近时,把接收器A和B接收到声源的声音的强弱分别转换成它们与声源之间的距离,从而判断声源是否到达目的地。
方案二、启用单片机定时器,根据接收器A和B接收到声音的时间差来判断声源的位置,进而调节电机运行的速度,直至声源是否到达目的地。
方案分析:鉴于方案一中声音的强弱受外界干扰太大,检测到的声音信号不定,而测量时间差则相对精确,所以本系统采用方案二。
三、设计与论证1、电机运行速度设计根据题目要求,可移动声源发出声音后开始运动,到达Ox线并停止。
要求平均速度大于 5cm/s。
如上图1所示,鉴于此要求,可以采用霍尔传感器直接测出电机的转速,并将此速度反馈给辅控制单片机,由此来调节占空比,进而调节电机的转速。
但由于比赛时间有限,此方案并未落实。
2、误差信号的产生声源发出声音并移动,辅助控制器控制A、B接收器同时启动,利用A、B接收器接收到声音的时间差来判断声源与Ox线之间的误差,若时间差大于零则说明声源与Ox线之间有误差,声源继续移动,直到时间差为零时停止。
历年年全国大学生电子设计竞赛题目

2015年全国大学生电子设计竞赛题目【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)第一届(1994年)第一届(1994年)全国大学生电子设计竞赛A.简易数控直流电源B.多路数据采集系统第二届(1995年)第二届(1995年)全国大学生电子设计竞赛A.实用低频功率放大器B.实用信号源的设计和制作C.简易无线电遥控系统D.简易电阻、电容和电感测试仪第三届(1997年)第三届(1997年)全国大学生电子设计竞赛直流稳定电源A.B.简易数字频率计C.水温控制系统D.调幅广播收音机第四届(1999年)第四届(1999年)全国大学生电子设计竞赛A.测量放大器B.数字式工频有效值多用表C.频率特性测试仪D.短波调频接收机E.数字化语音存储与回放系统第五届(2001年)第五届(2001年)全国大学生电子设计竞赛A.波形发生器B.简易数字存储示波器C.自动往返电动小汽车D.高效率音频功率放大器E.数据采集与传输系统F.调频收音机第六届(2003年)第六届(2003年)全国大学生电子设计竞赛A.电压控制LC振荡器宽带放大器B.C.低频数字式相位测量仪D.简易逻辑分析仪E.简易智能电动车F.液体点滴速度监控装置第七届(2005年)第七届(2005年)全国大学生电子设计竞赛A.正弦信号发生器B.集成运放测试仪C.简易频谱分析仪D.单工无线呼叫系统E.悬挂运动控制系统F.数控恒流源G.三相正弦波变频电源第八届(2007年)第八届(2007年)全国大学生电子设计竞赛A.音频信号分析仪B.无线识别C.数字示波器D.程控滤波器E.开关稳压电源F.电动车跷跷板积分式直流数字电压表G.H.信号发生器I.可控放大器J.电动车跷跷板第九届(2009年)第九届(2009年)全国大学生电子设计竞赛A.光伏并网发电模拟装置B.声音导引系统C.宽带直流放大器D.无线环境监测模拟装置E.电能收集充电器F.数字幅频均衡功率放大器G.低频功率放大器H.LED点阵书写显示屏I.模拟路灯控制系统第十届(2011年)A.开关电源模块并联供电系统B.基于自由摆的平板控制系统C.智能小车D. LC 谐振放大器E.简易数字信号传输性能分析仪F.帆板控制系统简易自动电阻测试仪G.H.波形采集、存储与回放系统第十一届(2013年)A.单相AC-DC变换电路B.四旋翼自主飞行器C.简易旋转倒立摆及控制装置D.射频宽带放大器E.简易频率特性测试仪F.红外光通信装置G.手写绘图板J.电磁控制运动装置K.简易照明线路探测仪L.直流稳压电源及漏电保护装置第十二届(2015年)【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)【高职高专组】LED闪光灯电源(H题)风板控制装置(I题)小球滚动控制系统(J题)获奖状况.。
历届全国大学生电子设计竞赛试题

历届全国大学生电子设计竞赛试题第一届(1994年)全国大学生电子设计竞赛题目(1)简易数控直流电源(A题)(2)多路数据采集系统(B题)第二届(1995年)全国大学生电子设计竞赛题目(1)实用低频功率放大器(A题)(2)实用信号源的设计和制作(B题)(3)简易无线电遥控系统(C题)(4)简易电阻、电容和电感测试仪(D题)第三届(1997年)全国大学生电子设计竞赛题目(1)直流稳压电源(A题)(2)简易数字频率计(B题)(3)水温控制系统(C题)(4)调幅扩播收音机(D题)第四届(1999年)全国大学生电子设计竞赛题目(1)测量放大器设计(A题)(2)数字式工频有效值多用表(B题)(3)频率特性测量仪设计(C题)(4)短波调频接收机设计(D题)(5)数字化语音存储与回放系统(E题)第五届(2001年)全国大学生电子设计竞赛题目(1)波形发生器(A题)(2)简易数字存储示波器(B题)(3)自动往返电动小汽车(C题)(4)高效率音频功率放大器(D题)(5)数据采集与传输系统(E题)(6)调频收音机(F题)第六届(2003年)全国大学生电子设计竞赛题目(1)电压控制LC振荡器(A题)(2)宽带放大器(B题)(3)低频数字式相位测量仪(C题)(4)简易逻辑分析仪(D题)(5)简易智能电动车(E题)(6)液体点滴速度监控装置(F题)第七届(2005年)全国大学生电子设计竞赛题目(1)正弦信号发生器(A题)(2)集成运放测试仪(B题)(3)简易频谱分析仪(C题)(4)单工无线呼叫系统(D题)(5)悬挂运动控制系统(E题)(6)数控恒流源(F题)(7)三相正弦波变频电源(G题)第八届(2007年)全国大学生电子设计竞赛题目(1)音频信号分析仪(八)【本科组】(2)无线识别(B)【本科组】(3)数字示波器(C)【本科组】(4)程控滤波器(D)【本科组】(5)开关稳压电源(E)【本科组】(6)电动车跷跷板(F)【本科组】(7)积分式直流数字电压表(G)【高职高专组】(8)信号发生器(三)【高职高专组】(9)可控放大器(D【高职高专组】(10)电动车跷跷板(J)【高职高专组】第九届(2009年)全国大学生电子设计竞赛题目(1)光伏并网发电模拟装置(A题)【本科组】(2)声音导引系统(B题)【本科组】(3)宽带直流放大器(C题)【本科组】(4)无线环境监测模拟装置(D题)【本科组】(5)电能收集充电㈱(E题)【本科组】(6)数字幅频均衡的功率放大器(F题)【本科组】(7)低频功率放大器(G题【高职高专组D(8)LED点阵书写显示屏(H题【高职高专组D (9)模拟路灯控制系统Q题【高职高专组】)。
声音导引系统(B题)

声音导引系统(B题)摘要:本设计以Atmega128单片机为控制核心,STC89C52RC为辅助控制器,电动车为执行器件,实现声音引导电动车精确定位的功能。
系统采用NEC电子电机控制ASSP 芯片(型号MMC-1),控制直流电机的运行,可实现256档调速。
小车平均速度达14cm/s。
采用斜率补偿法,实际最小定位误差为0.6cm。
采用nRF905无线模块实现小车与主控制器之间的通讯;采用RT12864液晶和ZLG7290键盘模块做为人机界面;采用MP3语音模块,提供优质的语音提示。
关键词:声音导引智能电动车无线收发定位目录1系统方案 (1)1.1总体设计方案 (1)1.1.1整体方案比较 (1)1.2设计与论证 (2)1.2.1定位方案的设计 (2)1.2.2误差信号产生及控制算法分析 (2)2单元电路设计 (3)2.1系统组成 (3)2.2控制器电路设计 (3)2.3音频接收电路设计 (3)2.4 nRF905无线模块电路设计 (4)2.5电机驱动电路设计 (4)2.6 SK-SDMP3语音模块电路设计 (4)2.7 其他硬件模块介绍 (4)3.软件设计 (4)3.1开发软件介绍 (4)3.2系统程序设计 (5)3.2.1主机系统主程序 (5)3.2.2从机系统主程序 (5)3.2.3其他子程序 (5)4.系统测试 (5)4.1测试使用的仪器及设备 (5)4.2指标测试和测试结果 (5)4.3 测试结果分析 (6)5.结论 (7)参考文献 (7)附录1图2.2.1 (7)附录2图2.5.1 (8)附录3图2.6.1 (10)附录4图2.7.1 (12)附录5表4.1.1 (13)附录6图4.2.1 (14)附录7表4.2.2 (14)附录8表4.2.4 (14)附录9表4.2.5 (15)附录10图4.2.1 (15)附录10主要元件清单 (16)附录10程序清单 (16)1系统方案1.1总体设计方案本系统设计要求实现三个位置不同的声音接收器引导一个可移动声源精确定位,设计要素有声音接收器、测距方案、以及定位算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
声音导引系统(B题)
【本科组】
一、任务
设计并制作一声音导引系统,示意图如图1所示。
图中,AB与AC垂直,Ox是AB的中垂线,O'y是AC的中垂线,W是Ox和O'y 的交点。
声音导引系统有一个可移动声源S,三个声音接收器A、B和C,声音接收器之间可以有线连接。
声音接收器能利用可移动声源和接收器之间的不同距离,产生一
个可移动声源离Ox线(或O'y线)的误差信号,并用无线方式将此误差信号传输至可移动声源,引导其运动。
可移动声源运动的起始点必须在Ox线右侧,位置可以任意指定。
二、要求
1.基本要求
(1)制作可移动的声源。
可移动声源产生的信号为周期性音频脉冲信号,如图2所示,声音信号频率不限,脉冲周期不限。
(2)可移动声源发出声音后开始运动,到达Ox线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于5cm/s。
(3)可移动声源停止后的位置与Ox线之间的距离为定位误差,定位误差小于3cm。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧的距离小于5cm。
(5)可移动声源到达Ox线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
2.发挥部分
(1)将可移动声源转向180度(可手动调整发声器件方向),能够重复基本要求。
(2)平均速度大于10cm/s。
(3)定位误差小于1cm。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧距离小于2cm。
(5)在完成基本要求部分移动到Ox线上后,可移动声源在原地停止5s~10s,然后利用接收器A和C,使可移动声源运动到W点,到达W点以后,必须有明显的光和声指示并停止,此时声源距离W的直线距离小于1cm。
整个运动过程的平均速度大于10cm/s。
(6)其他。
三、说明
1.本题必须采用组委会提供的电机控制ASSP芯片(型号MMC-1)实现可移动声源的运动。
2.在可移动声源两侧必须有明显的定位标志线,标志线宽度0.3cm且垂直于地面。
3.误差信号传输采用的无线方式、频率不限。
4.可移动声源的平台形式不限。
5.可移动声源开始运行的方向应和Ox线保持垂直。
6.不得依靠其他非声音导航方式。
7.移动过程中不得人为对系统施加影响。
8.接收器和声源之间不得使用有线连接。