SICK实例(CAN OPEN)-中文
CANopen使用手册_V1.01_.

ProNet 伺服驱动器ESTUNCANopen 使用手册修订记录日期修订版本描述作者初稿完成移振华增加第8章移振华1、第3,3,1章“PDO 参数”,修正PDO 默认表格中的COB-ID 和default 值;易健2、增加第9章“通讯例程”——目录——1、概述............................................................................................................................................ . (5)1.1 CAN 主要相关文档 (5)1.2 本手册使用的术语和缩语 (5)1.3 CAN OPEN 概述 (6)2、接线和连接 (7)3、CANOPEN 通讯 (8)3.1 CAN 标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC 报文 (20)3.5 E MERGENCY 报文 (21)3.6 HEARTBEAT 报文 (23)3.7网络管理(NMT ) (24)4、单位换算单元(FACTOR GROUP) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3shutdown_option_code (3)96.2.4disable_operation_option_code (40)6.2.5quick_stop_option_code (4)6.2.6halt_option_code (41)6.2.7fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1modes_of_operation (42)7.1.2modes_of_operation_display (43)7.2 回零模式(HOMINGMODE ) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零方法 (47)7.3 速度控制模式(PROFILE VELOCITYMODE ) (49)7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITIONMODE ) (53)7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN 通讯相关参数 (58)9、CANOPEN 通讯例程 (59)9.1 SDO 操作; (59)9.2 PDO 配置 (59)9.3 位置控制例子(P ROFILE P OSITON MODE ) (60)9.4 位置插补控制(I NTERPLATE P OSITION MODE ) (61)9.5 速度控制(P ROFILE V ELOCITY MODE ) (62)9.6 回零 (6)2对象字典表 (64)1、概述1.1 CAN 主要相关文档 CiA DS 301 V 4.01: CiA CANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiA CANopen Device Profile1.2 本手册使用的术语和缩语CANCiACOBEDSLMTNMTOD参数PDORORWSDO控制器局域网在自动化国际用户和制造商协会中的 CAN。
SICK全系列产品简介

NPN/PNP
IM 04: 0.4mm IM 05: 0.8mm IM 08: 1.5mm IM 12: 2mm IM 18: 5mm IM 30: 10/15mm
IP 67
-25℃ ...+70℃
IMB
圆柱形电感式 接近开关 10...30V DC 圆柱直径带螺纹: 8mm/12 mm/ 18 mm/30 mm 电感式
M20x1.5; 7/16-20
G ¼ 母头 , 根据 EN 837 多种卫生型过程连
UNF SAE #4J514 公头 ¼'' NPT; R ¼ , 根据 接等 ( LFP)
IP 67 -25℃ ...+55℃
IP 67 -40℃ ...+60℃
W27-3
光电开关 10...30V DC 12...240V DC 24...240V AC 红光 ; 红外线 ; 激光
NPN/PNP/Relay
漫反射式: 30...1100mm 30...1600mm 镜反射式:0.1...15m 对射式:0...35m
4
全系列产品简介 | SICK
6000002/2015-07-29 如有改动,恕不另行通知
产品型号 产品名称 供电电压 光源类型 输出方式
检测距离
防护等级 工作温度
W250-2
光电开关 10...30V DC 12...240V DC 24...240V AC 红光
NPN/PNP/Relay
W24-2
漫反射式:0...6m 镜反射式:4...180mm 对射式:0...5m
IP 67+ IP 69K -40℃ ...+60℃
产品型号 产品名称 供电电压 光源类型 输出方式
sick 拉线式编码器 canopen eds 使用例程 -回复

sick 拉线式编码器canopen eds 使用例程-回复Sick拉线式编码器是一种用于测量旋转或线性运动的装置,通常用于工业自动化领域。
CanOpen是一种用于控制和通信的网络协议,而EDS 是CanOpen设备描述文件。
在本文中,我们将详细介绍Sick拉线式编码器与CanOpen和EDS的使用实例。
第一步:了解Sick拉线式编码器Sick拉线式编码器是一种高精度的运动测量设备,可用于测量旋转、线性运动和位置。
它由一个固定的位置参考点和一个可移动的测量元件组成。
拉线式编码器可以在各种工业应用中使用,包括机械制造、自动化装置和机器人。
Sick拉线式编码器的工作原理基于光电和传感技术。
当测量元件相对于位置参考点移动时,光电传感器会检测到这个移动,并将其转换为电信号。
通过测量电信号的特征,可以确定测量元件的位置、运动和速度。
第二步:了解CanOpenCanOpen是一种用于控制和通信的开放型网络协议。
它基于CAN总线,并支持分布式控制系统。
CanOpen提供了一种标准化的方法来管理网络中的节点和设备,并使它们之间进行通信。
CanOpen定义了一组对象字典和通信机制,使得节点可以共享和访问设备的状态和功能。
CanOpen协议使用了一种基于消息的通信模型。
节点之间通过发送和接收消息来进行通信。
每个节点都有一个唯一的标识符,称为节点ID,用于区分不同的节点。
CanOpen消息包括一个固定格式的帧,其中包含了发送和接收节点的ID、指令和数据。
第三步:了解EDSEDS,全称是Electronic Data Sheet,是CanOpen设备描述文件的一种。
EDS文件用于描述和定义CanOpen设备的功能和特性。
它包含了设备的对象字典、通信参数、数据类型和映射等信息。
EDS文件使得CanOpen主站能够正确地识别和配置CanOpen设备,以实现正确的通信和控制。
EDS文件是一个文本文件,使用XML格式进行描述。
SICK光电传感器八大经典应用,你知道几个-

SICK光电传感器八大经典应用,你知道几个?SICK光电传感器八大经典应用,你知道几个呢?SICK光电传感器即环境光检测(依据传感器的照度用受光部检测的光量来判定四周的明暗)与接近检测(从具备传感器的发光源放射的光线照射到测量对象上,依据反射到传感器的接近用受光部的光量来判定距离测量对象的远近)。
环境光传感器可以优化调整 LED 背景灯的照明,这样不管是在昏暗的电影院还是光照充分的室外,在任何环境下我们的移动电话都能自我调整到适合的亮度。
接近传感器可以在接听电话的时候关掉触屏,这样我们就不会触到屏幕上的按键导致蓦地挂断电话或者点开其他功能了。
SICK光电传感器各种不同的汽车电子应用需求,有多种接近检测方法,如电容感测、红外、超声波、光学等。
对从 5mm 到300mm 范围的接近检测,电容式感测技术相对其它技术而言有很多优势:杰出的牢靠性、简单的机械设计、低功耗和低成本。
相比于触摸检测,在汽车门禁系统中使用接近检测的优势在于它能够在识别车主的时间上抢先,其结果是拉门之前,门锁就已经处于打开状态。
检测空间手势用于打开或关闭设备,也是汽车电子中常见应用。
同时使用两个或多个电容式接近传感器,就可以通过检测手掌在空中的简单动作(如在被检设备前挥手)来打开或关闭设备。
在电灯内设计传感电极有很多不同的方法,从使用细铜线到采纳可直接附着在塑料上的导电聚合物都有。
SICK光电传感器在屏蔽门上的应用为了安全,地铁屏蔽门越来越多地被地铁月台所使用。
接近开关传感器将会大量投入屏蔽门的技术应用中,地铁事故将会在传感器的应用中降到。
目前屏蔽门系统用来检测开门与关门的常用方案,一般是通过两个接近开关来检测门的开启和关闭。
由于接近传感器能以非接触方式进行检测,所以不会磨损和损伤检测对象物。
这也是它适合在地铁上安装的一个重要原因,随着接近传感器性能进一步提高,它将应用于更多的场合,将来不仅仅是地铁门,在公交等其它屏蔽门上都会有广泛的应用。
python canopen例子

python canopen例子标题:Python Canopen示例1. Canopen简介Canopen是一种用于工业自动化领域的通信协议,它基于CAN总线技术,用于在不同设备之间进行数据交换和控制。
Python Canopen 是一个用于处理Canopen协议的Python库,它提供了一套简单易用的API,使开发人员能够轻松地与Canopen设备进行通信。
2. 安装Python Canopen库要使用Python Canopen库,首先需要安装它。
可以通过以下命令使用pip进行安装:```pip install canopen```3. 创建Canopen网络在Python中,可以使用Canopen库来创建一个Canopen网络。
首先,我们需要导入必要的模块并创建一个Canopen网络对象:```pythonimport canopennetwork = work()```4. 连接到Canopen设备要连接到Canopen设备,我们需要指定设备的接口和波特率。
可以使用`connect()`方法来连接到设备:```pythonnetwork.connect(channel='can0', bustype='socketcan')```这里的`channel`参数指定了设备的接口,而`bustype`参数指定了使用的通信类型。
5. 扫描Canopen网络在连接到Canopen设备后,我们可以使用`scan()`方法来扫描整个网络,以获取所有已连接设备的节点ID:```pythonnodes = network.scan()```这将返回一个包含所有节点ID的列表。
6. 获取Canopen设备对象要与特定的Canopen设备进行通信,我们需要获取它的设备对象。
可以使用`get_node()`方法来获取设备对象:```pythonnode = network.get_node(1)```这里的参数1是设备的节点ID。
canopen应用案例

canopen应用案例
CanOpen是CAN总线上的一种高级通信协议,广泛应用于工业自动化领域。
下面我们将介绍几个CanOpen应用案例:
1. 焊接设备控制系统
该控制系统使用CanOpen协议实现了所有焊接设备的自动化控制。
每个焊接设备都通过CAN总线连接到一个CanOpen节点,节点之间可以实现实时数据交换。
通过CanOpen协议规定的数据类型、对象字典和服务,可以实现远程节点的配置、控制和诊断。
2. 电动汽车电池管理系统
电动汽车电池管理系统需要对车载电池进行实时监测和控制,以保证电池的安全和性能。
该系统使用CanOpen协议实现了电池管理单元和控制器之间的通信,可以实时获取电池的电压、温度、电量等参数,并根据控制器的指令进行充放电控制。
3. 工业机器人控制系统
工业机器人控制系统需要对机器人的运动轨迹、速度、力度等参数进行实时控制。
该控制系统使用CanOpen协议实现了机器人控制器和各个关节的通信。
通过CanOpen协议规定的PDO和SDO数据传输方式,可以实现高速、实时的数据传输。
4. 液压系统控制
液压系统控制需要对液压泵、电磁阀、油温传感器等设备进行精确控制。
该控制系统使用CanOpen协议实现了液压控制器和各个液压设备的通信。
通过CanOpen协议规定的服务和PDO数据传输方式,可
以实现实时的控制和反馈。
CANopen协议介绍(中文)
CMS 提供了一个开放的、面向对象的环境,用于实现用户的应用。CMS 提供基于变量、事件、 域类型的对象,以设计和规定一个设备(节点)的功能如何被访问(例如,如何上载下载超过 8 字节 的一组数据(域),并且有终止传输的功能)。
提供动态分配 CAN ID(正式名称为 COB-ID,Communication Object Identifier)服务。这种服务 是采用主从通讯模式(所以只有一个 DBT 主节点)来实现的。 LMT (Layer ManagemenT)
LMT 提供修改层参数的服务:一个节点(LMT Master)可以设置另外一个节点(LMT Slave)的 某层参数(如改变一个节点的 NMT 地址,或改变 CAN 接口的位定时和波特率)。
1541 - 1760
CMS 对象 优先级 7
1761 - 2015
NMT 节点保护
2016 - 2031
NMT,LMT,DBT 服务
注意这是 CAN2.0A 标准,11 位 ID 范围[0,2047],由于历史原因限制在[0,2031]。如果使用 CAN2.0B 标准,29 位 ID 并不改变这个描述;表中的 11 位映射到 29 位 COB-ID 中的最高 11 位,以至于表中的 COB-ID 范围变得增大许多。
CMS 从 MMS (Manufacturing Message Specification)继承而来。MMS 是 OSI 为工业设备的远程控 制和监控而制定的应用层规范。 NMT (Network ManagemenT)
提供网络管理(如初始化、启动和停止节点,侦测失效节点)服务。这种服务是采用主从通讯模 式(所以只有一个 NMT 主节点)来实现的。 DBT (DistriBuTor)
sick 拉线式编码器 canopen eds 使用例程 -回复

sick 拉线式编码器canopen eds 使用例程-回复关于使用CANOpen EDS的SICK拉线式编码器的使用例程引言:拉线式编码器是一种常见的用于测量位置、速度和加速度的传感器。
SICK 作为全球领先的传感器制造商,提供了各种各样的高质量的编码器产品。
为了更好地使用SICK拉线式编码器,我们可以使用CANOpen EDS (CANOpen Electronic Data Sheet)来配置和控制编码器。
本文将逐步介绍如何使用CANOpen EDS来使用SICK拉线式编码器的使用例程。
第一步:了解CANOpen和EDSCANOpen是一种基于CAN总线的通信协议,旨在实现在工业自动化系统中不同设备之间的通信。
CANOpen提供了一套标准的通信对象和服务,简化了设备之间的通信配置和控制。
EDS(Electronic Data Sheet)是一种描述CANOpen设备配置信息的文件。
它包含了设备的参数、对象字典和设备支持的服务等信息。
通过EDS 文件,我们可以了解设备的功能和,确定使用CANOpen协议与设备通信所需的参数。
第二步:获取SICK拉线式编码器的EDS文件首先,我们需要从SICK官方网站或联系SICK销售代表获取SICK拉线式编码器的EDS文件。
为了确保使用最新的EDS文件,请确保检查和下载SICK官方网站上提供的最新版本。
第三步:配置CANOpen网络在使用SICK拉线式编码器之前,我们需要配置CANOpen网络。
首先,确保我们有适当的硬件设备,如CAN接口卡或CANOpen主站设备来与编码器进行通信。
连接CAN接口卡或CANOpen主站设备到计算机上,并确保它们与编码器之间的连接正确。
接下来,我们需要在计算机上安装相应的CANOpen 通信库和驱动程序,以便与编码器进行通信。
验证网络配置的方法是通过CANOpen工具软件连接到网络。
这些工具软件通常提供连接、断开连接、发送和接收CANOpen消息的功能。
SICK SOPAS 使用手册

SOPAS ET V3.1.0 | SICK Subject to change without notice
1
TRAINING AND EDUCATION
Content: 1 ...... 引言 ............................................................................................................... 4 2 ...... SOPAS ET — 快速启动.................................................................................. 5
3 ...... 粘贴至 SOPAS 平台 .................................................................................. 24
3.1 .... 哲学 ........................................................................................................................... 25 3.2 ..... 功能原理 ................................................................................................................... 26 3.3 ..... SOPAS Device Driver - SDD...................................................................................... 28 3.4 ...... 下载 ........................................................................................................................... 29 3.5 ..... 系统条件 ................................................................................................................... 30 3.6 ...... 安装和初始启动 ....................................................................................................... 31
canopen eds 例子

canopen eds 例子全文共四篇示例,供读者参考第一篇示例:CANopen( Controller Area Network open)是一种开放的通信协议,用于控制设备之间的通信和数据交换。
它经常用于工业自动化领域,一些设备制造商会提供CANopen EDS( Electronic Data Sheet)文件来帮助用户了解如何配置和使用他们的设备。
本文将介绍CANopen EDS的基本概念,并给出一些使用CANopen EDS的例子。
让我们简要了解一下CANopen EDS是什么。
EDS文件是一种XML格式的文件,包含了设备的特性、参数、配置和通信对象等信息。
通过读取这些文件,用户可以了解设备的功能和如何与设备进行通信。
在CANopen网络中,每个设备都有一个唯一的标识符( Node ID),设备之间通过这个标识符来进行通信。
接下来,让我们看一下如何使用CANopen EDS文件。
您需要下载并安装一个CANopen配置工具,例如CANopen Architect。
然后,您可以通过导入设备的EDS文件来配置设备。
在配置工具中,您可以查看设备的参数、通信对象等信息,并根据需要进行修改。
您可以将配置文件下载到设备中,使设备按照您的要求进行操作。
下面是一个使用CANopen EDS的简单例子:假设您有一个CANopen网络,其中包含一个控制器和一个执行器。
控制器需要发送一个指令给执行器,让执行器执行一个动作。
您需要导入控制器和执行器的EDS文件到配置工具中。
然后,您可以配置控制器发送一个特定的消息给执行器,让执行器执行相应的动作。
您将配置好的文件下载到设备中,开始通信。
除了简单的例子外,CANopen EDS还可以用于更复杂的应用场景,例如在工业自动化中控制多个设备之间的通信,或者在汽车领域中控制车辆的各种功能。
通过使用CANopen EDS,用户可以轻松地配置和控制设备,实现设备之间的数据交换和协作。
(完整word)CANopen协议讲解

根据DS301的内容进行介绍1、CAN总线CAN标准报文2、CANopen应用层协议CANopen 协议不针对某种特别的应用对象,具有较高的配置灵活性,高数据传输能力,较低的实现复杂度。
同时,CANopen 完全基于CAN 标准报文格式,而无需扩展报文的支持,最多支持127个节点,并且协议开源。
一个标准的CANopen 节点(下图),在数据链路层之上,添加了应用层。
该应用层一般由软件实现,和控制算法共同运行在实时处理单元内。
一个标准的CANopen 节点CANopen 应用层协议细化了CAN 总线协议中关于标识符的定义。
定义标准报文的11 比特标识符中高4 比特为功能码,后7 比特为节点号,重命名为通讯对象标识符(COB-ID)。
功能码将所有的报文分为7个优先级,按照优先级从高至低依次为:网络命令报文(NMT)同步报文(SYNC)紧急报文(EMERGENCY)时间戳(TIME)过程数据对象(PDO)服务数据对象(SDO)节点状态报文(NMT Err Control)7 位的节点号则表明CANopen 网络最多可支持127个节点共存(0 号节点为主站)。
下表给出了各报文的COB-ID 范围。
NMT 命令为最高优先级报文,由CANopen 主站发出,用以更改从节点的运行状态。
SYNC 报文定期由CANopen 主站发出,所有的同步PDO 根据SYNC报文发送。
EMERGENCY报文由出现紧急状态的从节点发出,任何具备紧急事件监控与处理能力的节点会接收并处理紧急报文。
TIME 报文由CANopen 主站发出,用于同步所有从站的内部时钟。
PDO 分为4 对发送和接收PDO,每一个节点默认拥有4对发送PDO 和接收PDO,用于过程数据的传递。
SDO 分为发送SDO 和接收SDO,用于读写对象字典。
MT Error Control报文由从节点发出,用以监测从节点的运行状态。
状态机CANopen 的每一个节点都维护了一个状态机。
canopen eds 例子

canopen eds 例子
CANopen是一种基于CAN总线的高级通信协议,用于工业控制
系统中的设备之间的通信。
EDS(Electronic Data Sheet)是CANopen设备描述文件的一种格式,它描述了CANopen设备的通信
参数、对象字典、功能码等信息。
下面我会举一个简单的CANopen EDS的例子来帮助你理解。
假设我们有一个简单的CANopen设备,比如一个温度传感器。
它的EDS文件可能包含以下信息:
1. 设备的标识信息,比如制造商、设备类型等。
2. 通信参数,比如设备的节点ID、波特率等。
3. 对象字典,描述了设备支持的各种数据对象,比如温度数值、设备状态等。
4. PDO(Process Data Object)映射,描述了设备支持的PDO
通信方式,即实时数据的传输方式。
举个简单的例子,假设温度传感器的EDS文件中包含了一个温
度数据对象,它的索引是0x6200,数据类型是16位整数,表示温
度值。
这个EDS文件还会定义这个对象的访问权限、单位等信息。
另外,EDS文件还包含了设备支持的各种功能码,比如NMT(网
络管理)、SDO(服务数据对象)等,以及它们的参数和使用方法。
总的来说,一个CANopen EDS文件包含了设备的详细描述信息,使得CANopen主站可以准确地与设备进行通信和控制。
希望这个例
子能帮助你更好地理解CANopen EDS文件的作用和内容。
CANOpen的几种操作以及数据

CANOpen的几种操作以及数据其实3年前在21ic就准备做这篇文章了,那时,CANOpen也只是刚刚在国内推广,所以几乎没有项目用到。
现在有了实际的项目,完全确认了以前移植和测试的代码,所以列举一些CANOpen的底层操作以及数据。
当然,列举的都是一些简单的基本的CANOpen通信,不包括其他CANOpen应用协议中的内容。
1.心跳CANOpen节点会以一个固定的频率发送心跳报文。
用于告诉主机,偶还活着。
心跳报文的格式很简单,COB-ID为0x700+Node_ID,数据为一字节的状态数据:图中,ID为706,表示06号节点的心跳,状态是0x7F,表示Pre-Operational状态(节点初始化完成后,进入Pre-Operational状态)。
查看时间,每个心跳报文时间间隔大概1秒。
2.NMTNMT是管理报文,用于实现一些管理操作,比如,节点重启、进入Operational状态等等。
NMT报文格式很简单,ID为000,数据为一字节命令+一节节点号(0表示广播)。
第2号报文就是让06号节点,进入Operational状态,运行完成后,节点心跳报文中的节点状态也变为Operational状态同上,发送stop remote node命令,进入Stopped状态,当然,心跳还是有的,只是节点不干活了这个是reset node命令,用于让节点复位。
复位之后,会首先进入Initializing状态(对于于心跳报文中的0x00),初始化完成后,进入Pre-Operational状态(对应心跳报文中的0x7F)。
3.SDOSDO 主要用来访问节点的对象字典(OD),CANOpen的节点至少需要支持SDO_Server。
对象字典是CANOpen节点的数据组织形式,包含了CANOpen节点的各个参数和数据,比如,心跳报文的发送频率、系统启动次数、节点的通信参数等等等等。
可以说,SDO 是用来设置CANOpen节点的各个运行参数的。
sick-安全继电器编程-中文版

1044124
2. 应断
无任何应应应史。
3. 应置
3.1. 已安装的应件应件
1.6.0.89 1.3.0.115 1.5.0.85 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89 1.6.0.89
SICK Flexi-Soft 应展模 应 FX3-XTIO
应面 3
Flexi Soft Designer 2013/11/8 9:18:48
QTY
1 1 1 1 1 1 1
应应
C4000 / 安全光幕,第 4 应 XTDI 应通道 NO / 应通道 应通道 NO / 应通道 应通道 NO / 应通道 双通道常开 / 双通道 双通道常应 / 双通道
应型代应
FX3-CPU000000 FX3-XTIO84002 FX3-XTIO84002 FX3-XTDI80002
步应
V V V V 2.xx 3.xx 3.xx 3.xx
地址
0 1 2 3
3.3.
3.3.1.
应型代应
CPU
CPU0 - 一般信息
序列号
-
应件版本
-
硬件版本
-
版本/步应
1.6.0.89 V 2.xx 1.6.0.89
I/O 模应............................................................................7
sick 拉线式编码器 canopen eds 使用例程 -回复

sick 拉线式编码器canopen eds 使用例程-回复标题:使用例程详解:Sick拉线式编码器与Canopen EDS的集成应用一、引言在工业自动化领域中,编码器作为一种重要的传感器设备,被广泛应用在位置测量、速度控制等各种场合。
其中,Sick拉线式编码器因其高精度、长寿命和稳定的性能受到广大用户的青睐。
而Canopen作为一种强大的现场总线协议,能够实现设备间的高效通信。
当Sick拉线式编码器与Canopen EDS(Electronic Data Sheet,电子数据表)结合使用时,可以进一步提升系统的性能和灵活性。
以下我们将详细介绍Sick拉线式编码器与Canopen EDS的使用例程。
二、Sick拉线式编码器简介Sick拉线式编码器是一种通过机械方式将位移转换为电信号的装置。
其工作原理是通过一根连接在编码器内部的钢丝绳,随着被测物体的移动,钢丝绳带动编码器内部的码盘转动,从而产生相应的电脉冲信号,这些信号经过处理后就可以得到被测物体的位置信息。
三、Canopen EDS简介Canopen EDS是一种用于描述Canopen设备特性的文件格式,它包含了设备的所有参数、状态、命令等信息。
通过使用EDS文件,系统可以自动识别并配置设备,大大简化了设备的集成过程。
四、Sick拉线式编码器与Canopen EDS的集成步骤1. 设备准备:首先,确保你已经拥有一台Sick拉线式编码器和一个支持Canopen协议的控制器。
2. 获取EDS文件:从Sick官方网站或者相关的技术支持渠道获取对应的拉线式编码器的Canopen EDS文件。
3. 配置控制器:在控制器的Canopen配置软件中导入获取到的EDS文件。
这一步骤通常会自动完成设备的节点ID、通信参数等设置。
4. 连接设备:将Sick拉线式编码器通过Canopen网络连接到控制器。
5. 测试通信:在控制器的软件中发送一些基本的读取或写入命令,检查编码器是否能正常响应。
sick 拉线式编码器 canopen eds 使用例程

sick 拉线式编码器canopen eds 使用例程标题:使用例程详解:Sick拉线式编码器与Canopen EDS的整合应用一、引言在现代工业自动化领域中,编码器作为一种重要的传感器设备,被广泛应用于各种位置和速度测量场景。
其中,Sick拉线式编码器因其高精度、高稳定性以及适应复杂环境的能力而备受青睐。
同时,CANopen作为一种强大的现场总线协议,为设备间的通信提供了便捷的途径。
本文将详细介绍如何使用Sick拉线式编码器与CANopen EDS(Electronic Data Sheet)进行整合,并提供详细的使用例程。
二、Sick拉线式编码器简介Sick拉线式编码器是一种通过机械方式测量物体位移或角度的设备。
其工作原理是通过一根拉线的伸缩来改变内部码盘的位置,进而产生相应的电脉冲信号,这些信号经过处理后可以得到精确的位置或速度信息。
三、CANopen协议与EDS文件CANopen是一种基于CAN(Controller Area Network)总线的高层协议,它定义了设备间的通信规则和数据格式,使得不同制造商的设备可以无缝集成到同一网络中。
EDS文件则是CANopen设备的一种电子数据表,包含了设备的基本信息、通信参数、对象字典等内容,是设备实现CANopen通信的关键配置文件。
四、Sick拉线式编码器与CANopen EDS的整合步骤以下是一个详细的使用例程,展示了如何将Sick拉线式编码器与CANopen EDS进行整合:1. 获取并安装驱动和配置软件:首先,需要从Sick官方网站下载并安装对应的驱动程序和配置软件,如"SICK SOPAS ET"。
2. 配置编码器:通过SOPAS ET软件,对编码器进行基本的参数配置,包括波特率、节点ID、操作模式等。
3. 导入EDS文件:在SOPAS ET软件中,选择“Device Configuration”选项,然后点击“Import EDS File”按钮,导入对应的EDS文件。
sick gcan canopen协议模块编程实例

在Sick的GCan系列中,GCan-PDO-Modbus模块可用于将S7-300 PLC连接到CANopen网络。
以下是一个简单的编程实例,演示如何使用GCan-PDO-Modbus模块在S7-300 PLC中实现CANopen协议的编程。
首先,需要安装GCan-PDO-Modbus模块的驱动程序,并将其添加到PLC项目中。
然后,可以按照以下步骤进行编程:1. 创建一个新的PDO对象,并设置其通信参数。
这些参数包括CAN通道、波特率、数据位、停止位等。
2. 创建一个PDO映射表,用于将S7-300 PLC中的数据字节映射到CANopen协议中的数据字段。
例如,如果要将PLC中的DB1.DBX0.0字节映射到CANopen协议中的“速度”字段,则可以在映射表中添加一条记录,将DB1.DBX0.0的地址和位设置为速度字段的值。
3. 在S7-300 PLC中编写程序,以将数据写入映射表中。
例如,如果要将速度字段的值设置为100,则可以使用MOVE指令将DB1.DBX0.0字节的值设置为100。
4. 在GCan-PDO-Modbus模块中编写程序,以从映射表中读取数据并将其发送到CANopen网络中。
例如,可以使用GET指令从映射表中读取速度字段的值,并将其发送到CANopen网络中。
5. 在CANopen网络中,其他节点可以使用相同的方法从映射表中读取数据,并将其用于控制或监视应用程序中。
以上是一个简单的编程实例,演示了如何使用GCan-PDO-Modbus模块在S7-300 PLC中实现CANopen协议的编程。
需要注意的是,具体的实现方式可能会因不同的PLC 型号和不同的应用程序而有所不同。
canopen joystick 例子
canopen joystick 例子CanOpen是一种用于工业自动化领域的通信协议,可以实现实时控制和数据交换。
在CanOpen协议中,Joystick(操纵杆)是一种常见的输入设备,用于控制机器人、操纵装置或其他机械设备的运动。
下面将以CanOpen Joystick为例,介绍其工作原理、配置和使用方法等内容。
一、操纵杆的工作原理CanOpen Joystick通过将操纵杆的运动转换为电信号,然后通过CanOpen协议将信号传输给控制器,从而实现对机器人或其他设备的运动控制。
操纵杆通常由两个轴和若干个按钮组成。
轴可以控制设备的运动方向和速度,按钮可以进行其他功能的控制。
二、操纵杆的配置在使用CanOpen Joystick之前,需要对其进行配置。
配置包括设定操纵杆的通信参数、轴和按钮的功能映射等。
配置通常通过CanOpen配置工具或编程软件进行。
具体的配置方法可以参考设备的用户手册或相关文档。
三、操纵杆的使用方法使用CanOpen Joystick进行机器人或设备的控制可以分为以下几个步骤:1. 连接操纵杆和控制器:将操纵杆通过合适的接口连接到控制器。
常见的接口有USB、串口、以太网等。
2. 配置操纵杆:根据实际需求,对操纵杆进行配置,包括通信参数、轴和按钮的功能映射等。
3. 程序开发:根据设备的运动控制需求,进行程序开发。
程序开发可以使用CanOpen协议的相关API或开发工具。
4. 运行程序:将程序下载到控制器中,然后启动程序。
此时可以通过操纵杆控制机器人或设备的运动。
5. 调试和优化:根据实际运行情况,进行调试和优化。
可以通过监控操纵杆的输出信号、设备的运动状态等来进行调试和优化。
四、操纵杆的应用领域CanOpen Joystick广泛应用于工业自动化领域,特别是机器人和操纵装置的控制。
它可以实现对机器人的精确控制,包括位置控制、速度控制和力控制等。
同时,CanOpen Joystick还可以应用于医疗设备、航空航天设备、军事装备等领域。
SICK 西克 条码阅读器调试手册-CLV6系列

OFF ON
输出信号为+24V,
最大电流100mA
13 16
14
GND Result1 T+
S3
ON
CDB420-001
OFF
CDB420-001接线端子
15 24 25 26 17 27 28
29
R+ T- R- GND SGND SGND Sensor1 +24V
蜂鸣器及报警灯 继电器
R+ T+ R- T- GND RS422-RS232转换器
3、单台条码阅读器参数设置及调试
广州市施克传感器有限公司
1、SICK 扫描器的调试和参数设置一般通过扫描器的 Terminal 端口进行。也就 是通过接线盒 CDB420 中的 AUX Interfac(e 9 针插头)将扫描器与计算机相连接。 连接电缆的选用 2-3 交叉串口通信电缆,电缆的连线如下图所示,
Multiread:重复次数,默认为 3,1-99 可选。速度越快,设定重复次 数越少。
Free:指条码的长度是随意的,只要是这类条码都识别。 Fixed:指条码的长度是固定的,跟此长度不同的不识别。
第 17 页 共 36 页
广州市施克传感器有限公司
在 Serial 下: (一般要修改,根据实际需要选择)
在 Output Control 下:(一般要修改,根据实际需要选择)
第 14 页 共 36 页
英文 End of Trigger As soon as possible
End of Label New Label
Single
Multiple
Good Read Condition Match1 Condition TeachIn1 Condition TeachIn2
Kinco伺服CANOPEN通讯使用说明(一)
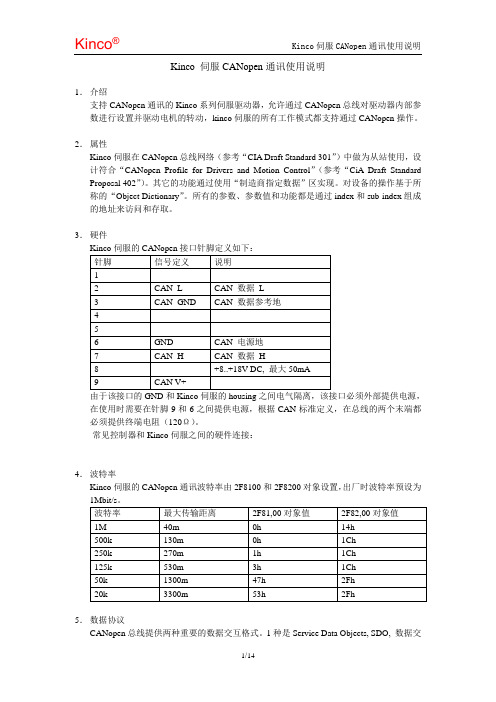
Kinco 伺服CANopen通讯使用说明1.介绍支持CANopen通讯的Kinco系列伺服驱动器,允许通过CANopen总线对驱动器内部参数进行设置并驱动电机的转动,kinco伺服的所有工作模式都支持通过CANopen操作。
2.属性Kinco伺服在CANopen总线网络(参考“CIA Draft Standard 301”)中做为从站使用,设计符合“CANopen Profile for Drivers and Motion Control”(参考“CiA Draft Standard Proposal 402”)。
其它的功能通过使用“制造商指定数据”区实现。
对设备的操作基于所称的“Object Dictionary”。
所有的参数、参数值和功能都是通过index和sub-index组成的地址来访问和存取。
3.硬件由于该接口的GND和Kinco伺服的housing之间电气隔离,该接口必须外部提供电源,在使用时需要在针脚9和6之间提供电源,根据CAN标准定义,在总线的两个末端都必须提供终端电阻(120Ω)。
常见控制器和Kinco伺服之间的硬件连接:4.波特率Kinco伺服的CANopen通讯波特率由2F8100和2F8200对象设置,出厂时波特率预设为5.数据协议CANopen总线提供两种重要的数据交互格式。
1种是Service Data Objects, SDO, 数据交互按照DS301标准执行。
1种是Process Data Objects, PDOs, 数据交互不执行该标准。
除了PDO和SDO这两种数据传输协议外,还有一些其它的信息被定义用于更多的应用5.1 标识定义所有信息(通讯对象,COB)通过标识(COB-ID)后由主站传递到从站,然后返回。
具有最低COB-ID的信息有着最高的总线优先级。
下表列出了一些重要的COB-ID内容,这些ID 配合节点地址使用。
在对象2F80,00(Node_Offset)中值被加到节点地址值(伺服驱动器面板商的DIP开关)中,做为设备的节点地址。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Flexi Soft DesignerSICK应用名称: KU 20-10-15设备 CRC 工具: 0x1295C49E - 设备 CRC 设备: 0x00000000配置日期和时间: 2015/12/21 13:51:00内容1.物料清单 (4)2.诊断 (5)3.项目摘要 (6)4.项目附注 (6)5.设置 (6)5.1.已安装的软件组件 (6)5.2.一般信息 (6)5.2.1.CPU0 - 一般信息 (7)5.2.1.1.CRC 值 (7)5.2.2.GCAN - 一般信息 (7)5.2.3.XTIO - 一般信息 (7)5.2.4.XTIO - 一般信息 (7)5.2.5.XTIO - 一般信息 (8)5.2.6.XTIO - 一般信息 (8)5.2.7.XTIO - 一般信息 (8)5.2.8.XTIO - 一般信息 (8)5.2.9.XTIO - 一般信息 (8)5.3.逻辑 (8)5.3.1.CPU 逻辑 (8)5.3.1.1.Page 1 (8)5.3.1.2.Page 2 (11)5.4.I/O 模块 (13)5.4.1.CPU0 - IO (13)5.4.1.1.接线图 (13)5.4.2.51F1 (14)5.4.2.1.一般信息 (14)5.4.2.2.输入 (14)5.4.2.3.输出 (14)5.4.2.4.电源 (14)5.4.2.5.接线图 (14)5.4.3.51F2 (15)5.4.3.1.一般信息 (15)5.4.3.2.输入 (15)5.4.3.3.输出 (16)5.4.3.4.电源 (16)5.4.3.5.接线图 (16)5.4.4.52F1 (16)5.4.4.1.一般信息 (16)5.4.4.2.输入 (17)5.4.4.3.输出 (17)5.4.4.4.电源 (17)5.4.4.5.接线图 (17)5.4.5.52F2 (18)5.4.5.1.一般信息 (18)5.4.5.2.输入 (18)5.4.5.3.电源 (19)5.4.5.4.接线图 (19)5.4.6.53F1 (19)5.4.6.1.一般信息 (19)5.4.6.2.输入 (19)5.4.6.3.电源 (20)5.4.6.4.接线图 (20)5.4.7.53F2 (20)5.4.7.1.一般信息 (21)5.4.7.2.输入 (21)5.4.7.3.电源 (21)5.4.7.4.接线图 (21)5.4.8.54F1 (22)5.4.8.1.一般信息 (22)5.4.8.2.输入 (22)5.4.8.3.输出 (23)5.4.8.4.电源 (23)5.4.8.5.接线图 (23)5.5.路由 (23)5.5.1.GCAN - 路由 (24)5.5.1.1.CPU到网络 (24)5.5.1.2.网络到 CPU (25)5.6.设备设置 (26)5.6.1.GCAN - 设备设置 (26)6.I/O 概览 (26)6.1.I/O 模块 (26)1.物料清单描述QTY标题标签名称订货号内部项编号1CPU050F11043783SICK Flexi-Soft 主模块FX3-CPU01MPL0系统插头1043700Flexi Soft 系统插头1GCAN50F21044076SICK GCAN 模块1XTIO51F11044125SICK Flexi-Soft 扩展模块 FX3-XTIO2EDM / 单通道Ctrl 51KM1 &51KM2.51F1.I11急停,ES21 / 单通道急停,ES21.51F1.I21复位 / 单通道Operator panel RearmingBP.51F1.I71复位 / 单通道Output conveyorRearming BP.51F1.I82急停,ES21 / 双通道Filling emergency stop.51F1.I3I41急停,ES21 / 双通道Output conveyoremergencystop.51F1.I5I61电机接触器 / 双通道51KM1 & 51KM2.51F1.Q1Q21XTIO51F21044125SICK Flexi-Soft 扩展模块 FX3-XTIO1感应接近开关 / 单通道NO Filling air valve Ctrl.51F2.I51感应接近开关 / 单通道NO Output conveyor airvalve Ctrl.51F2.I61急停,ES21 / 单通道急停,ES21.51F2.I71急停,ES21 / 单通道急停,ES21.51F2.I81阀门 / 单通道Filling air valve400Y1.51F2.Q11阀门 / 单通道Output conveyor airvalve 400Y2.51F2.Q21电机接触器 / 单通道Right plate validation211KM2.51F2.Q3QTY标题标签名称订货号内部项编号描述1电机接触器 / 单通道left plate validation211KM3.51F2.Q42安全开关 / 双通道Weighing station doors& flap.51F2.I1I21安全开关 / 双通道Output conveyor endswitch.51F2.I3I41XTIO52F11044125SICK Flexi-Soft 扩展模块 FX3-XTIO1模式切换 / 40551模式切换.52F1.I1/I2/I3/I4/I5/I6/I7/I81PNP 输出 / 单通道Weldinginhibition.52F1.Q11XTIO52F21044125SICK Flexi-Soft 扩展模块 FX3-XTIO1模式切换 / 40547模式切换.52F2.I1/I2/I3/I41模式切换 / 40547模式切换.52F2.I5/I6/I7/I81XTIO53F11044125SICK Flexi-Soft 扩展模块 FX3-XTIO1T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 1.53F1.I1I21T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 2.53F1.I3I41T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 3.53F1.I5I61T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 4.53F1.I7I81XTIO53F21044125SICK Flexi-Soft 扩展模块 FX3-XTIO1T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 5.53F2.I1I21T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 6.53F2.I3I41T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 7.53F2.I5I61T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 8.53F2.I7I81XTIO54F11044125SICK Flexi-Soft 扩展模块 FX3-XTIO1急停,ES21 / 单通道急停,ES21.54F1.I31急停,ES21 / 单通道急停,ES21.54F1.I41急停,ES21 / 单通道急停,ES21.54F1.I51急停,ES21 / 单通道急停,ES21.54F1.I61单通道NC / 单通道STO Filling inverterfeedback.54F1.I71单通道NC / 单通道STO Output conveyorinverterfeedback.54F1.I81PNP 输出 / 单通道STO filling inverter.54F1.Q11PNP 输出 / 单通道STO output conveyorinverter.54F1.Q21T4000 Direct / 非接触式联锁转发器,第 4 类Filling station door 9.54F1.I1I21UE410-4R03UE410-4R036026143SICK 继电器输出扩展UE410-4RO32.诊断无任何错误历史。
3.项目摘要项目客户4.项目附注日期注释用户5.设置5.1.已安装的软件组件基本组件 (站) 1.7.0.101Software component for GCC1 Network Modules 1.3.0.115Software component for GS3S gateway 1.5.0.85对UE410-2RO3继电器模块的软件部分 1.7.0.101适用于 UE410-4RO3 继电器模块的软件组件 1.7.0.101GCAN 网关的软件组件 1.7.0.101Software component for GDEV gateway 1.7.0.101GENT 网关的软件组件 1.7.0.101GETC 网关的软件组件 1.7.0.101GMOD 网关的软件组件 1.7.0.101GPNT 网关的软件组件 1.7.0.101GPRO 网关的软件组件 1.7.0.101Drive Monitor FX3-MOC0 模块的软件组件 1.7.0.101MOC3SA 运动控制模块的软件组件 1.7.0.101适用于 FX0-STIO 扩展模块的软件组件 1.7.0.101对UE10继电器模块的软件部分 1.7.0.101对UE10继电器模块的软件部分 1.7.0.101FX3-XTDI 扩展模块的软件组件 1.7.0.101适用于 FX3-XTDS 扩展模块的软件组件 1.7.0.101FX3-XTIO 扩展模块的软件组件 1.7.0.101FX3-CPU0 和 FX3-CPU1 主模块的软件组件 1.7.0.1015.2.一般信息用户组机器操作员应用名称KU 20-10-15应用描述配置CRC0x1295C49E设备 CRC-配置状态未被证实设置数据2015/12/21 13:51模块类型代码步骤地址CPU0FX3-CPU000000V 2.xx0GCAN FX0-GCAN00000V 1.xx13XTIO FX3-XTIO84002V 1.xx1XTIO FX3-XTIO84002V 1.xx2XTIO FX3-XTIO84002V 1.xx3XTIO FX3-XTIO84002V 1.xx4XTIO FX3-XTIO84002V 1.xx5XTIO FX3-XTIO84002V 1.xx6XTIO FX3-XTIO84002V 1.xx7UE410-4R03UE410-4R03-5.2.1.CPU0 - 一般信息地址类型代码序列号软件版本硬件版本版本/步骤内存使用 (UI/逻辑)FX3-CPU0000001536 0845V 3.03.0- 1.7.0.101 V 2.xx10.85% / 12.45%0FX3-MPL0000011531 0892-- 1.7.0.101--5.2.1.1.CRC 值项目 CRC 值设备 CRC 值配置CRC0x1295C49E-5.2.2.GCAN - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX0-GCAN000001529 0023V 1.31.0 1.03 1.7.0.101 V 1.xx135.2.3.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0741V 3.10.0- 1.7.0.101 V 1.xx15.2.4.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0815V 3.10.0- 1.7.0.101 V 1.xx2 5.2.5.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0739V 3.10.0- 1.7.0.101 V 1.xx3 5.2.6.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0809V 3.10.0- 1.7.0.101 V 1.xx4 5.2.7.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0805V 3.10.0- 1.7.0.101 V 1.xx5 5.2.8.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0807V 3.10.0- 1.7.0.101 V 1.xx6 5.2.9.XTIO - 一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0803V 3.10.0- 1.7.0.101 V 1.xx7 5.3.逻辑5.3.1.CPU 逻辑使用的功能块39执行时间 (ms)45.3.1.1.Page 1否名称输入输出设置中0用户模式切换I.0 No door inhibited.52F1.I1O.0 OR 6 -> I.0 -> 输入1差异时间: 200 ms I.1 Door 1 inhibited.52F1.I2O.0 Sans shuntI.2 Door 2 inhibited.52F1.I3O.1 OR 0 -> I.1 -> 输入2I.3 Door 3 inhibited.52F1.I4O.1 OR 6 -> I.1 -> 输入2I.4 Door 4 inhibited.52F1.I5O.2 OR 1 -> I.1 -> 输入2I.5 Door5inhibited.52F1.I6O.2 OR 6 -> I.2 -> 输入3I.6 Door 6 inhibited.52F1.I7O.3 OR 2 -> I.1 -> 输入2I.7 Marqueur 0.7O.3 OR 6 -> I.3 -> 输入4O.4 OR 3 -> I.1 -> 输入2O.4 OR 6 -> I.4 -> 输入5O.4 OR 4 -> I.1 -> 输入2O.5 OR 6 -> I.5 -> 输入6O.6 OR 5 -> I.1 -> 输入2O.6 OR 6 -> I.6 -> 输入7O.7 未连接1OR I.0 Filling stationdoor 1.53F1.I1I2O.0 与 0 -> I.2 -> Input3输入1: 不取反I.1 用户模式切换 0 -> O.1 -> SHUNT PORTE 1输入2: 不取反2OR I.0 Filling stationdoor 2.53F1.I3I4O.0 与 0 -> I.1 -> Input2输入1: 不取反I.1 用户模式切换 0 -> O.2 -> SHUNT PORTE 2输入2: 不取反3OR I.0 Filling stationdoor 3.53F1.I5I6O.0 与 0 -> I.0 -> Input1输入1: 不取反I.1 用户模式切换 0 -> O.3 -> SHUNT PORTE 3输入2: 不取反4OR I.0 Filling stationdoor 4.53F1.I7I8O.0 与 0 -> I.3 -> Input4输入1: 不取反I.1 用户模式切换 0 -> O.4 -> SHUNT PORTE 4输入2: 不取反5OR I.0 Filling stationdoor 5.53F2.I1I2O.0 与 0 -> I.4 -> Input5输入1: 不取反I.1 用户模式切换 0 -> O.4 -> SHUNT PORTE 4输入2: 不取反6OR I.0 Filling stationdoor 6.53F2.I3I4O.0 与 11 -> I.1 ->Input 2输入1: 不取反I.1 用户模式切换 0 -> O.6 -> SHUNT PORTE 6输入2: 不取反7OR I.0 用户模式切换 0 -> O.0 -> SANS SHUNT PORTE O.0 与 1 -> I.0 -> Input1输入1: 不取反I.1 用户模式切换 0 -> O.1 -> SHUNT PORTE 1O.0 用户模式切换 1 -> I.0 -> DDE SHUNT PORTE 8输入2: 不取反I.2 用户模式切换 0 -> O.2 -> SHUNT PORTE 2输入3: 不取反I.3 用户模式切换 0 -> O.3 -> SHUNT PORTE 3输入4: 不取反I.4 用户模式切换 0 -> O.4 -> SHUNT PORTE 4输入5: 不取反I.5 用户模式切换 0 -> O.5 -> SHUNT PORTE 5输入6: 不取反I.6 用户模式切换 0 -> O.6 -> SHUNT PORTE 6输入7: 不取反8与I.0 OR 2 -> O.0 -> Door3 OK O.0 与 12 -> I.0 ->Input 1Input 1: 不取反I.1 OR 1 -> O.0 -> Door2 OKInput 2: 不取反I.2 OR 0 -> O.0 -> Door1 OKInput 3: 不取反I.3 OR 3 -> O.0 -> Door4 OKInput 4: 不取反I.4 OR 4 -> O.0 -> Door5 OKInput 5: 不取反9用户模式切换I.0 OR 6 -> O.0 -> Ctrlshunt 1/2O.0 未连接差异时间: 200 ms I.1 Door 7 inhibited.52F1.I8O.1 OR 7 -> I.0 -> 输入1I.2 Door 8 inhibited.52F2.I1O.1 OR 14 -> I.1 -> 输入2I.3 Door 9 inhibited.52F2.I2O.2 OR 7 -> I.1 -> 输入2I.4 Door 10 inhibited.52F2.I3O.2 OR 9 -> I.1 -> 输入2I.5 Door 11 inhibited.52F2.I4O.3 OR 7 -> I.2 -> 输入3O.3 OR 10 -> I.1 -> 输入2O.4 OR 7 -> I.3 -> 输入4O.5 OR 7 -> I.4 -> 输入510OR I.0 用户模式切换 1 -> O.1 -> SHUNT PORTE 9O.0 与 1 -> I.1 -> Input2输入1: 不取反I.1 用户模式切换 1 -> O.2 -> SHUNT PORTE 10O.0 Marqueur 0.7输入2: 不取反I.2 用户模式切换 1 -> O.3 -> SHUNT PORTE 11输入3: 不取反I.3 用户模式切换 1 -> O.4 -> 输出 5输入4: 不取反I.4 用户模式切换 1 -> O.5 -> 输出 6输入5: 不取反11与I.0 OR 6 -> O.0 -> Ctrlshunt 1/2O.0 OR 8 -> I.0 -> 输入1Input 1: 不取反I.1 OR 7 -> O.0 -> Ctrlshunt 2/2Input 2: 不取反12与I.0 No door inhibited.52F1.I1O.0 与 4 -> I.1 -> Input2Input 1: 取反I.1 Door 1 inhibited.52F1.I2Input 2: 取反I.2 Door 2 inhibited.52F1.I3Input 3: 取反I.3 Door 3 inhibited.52F1.I4Input 4: 取反I.4 Door 4 inhibited.52F1.I5Input 5: 取反I.5 Door5inhibited.52F1.I6Input 6: 取反I.6 Door 6 inhibited.52F1.I7Input 7: 取反I.7 Door 7 inhibited.52F1.I8Input 8: 取反13与I.0 Door 8 inhibited.52F2.I1O.0 与 5 -> I.1 -> Input2Input 1: 取反I.1 Door 9 inhibited.52F2.I2Input 2: 取反I.2 Door 10 inhibited.52F2.I3Input 3: 取反I.3 Door 11 inhibited.52F2.I4Input 4: 取反14OR I.0 与 1 -> O.0 -> DéfCtrl shuntO.0 Défaut shunt portes输入1: 不取反I.1 Def 1 shunt carter O.0 与 11 -> I.4 ->Input 5输入2: 不取反I.2 Def 2 shunt carter输入3: 不取反15与I.0 用户模式切换 0 -> O.8 -> 故障出现O.0 Def 1 shunt carter Input 1: 不取反I.1 与 2 -> O.0 ->Output 1Input 2: 取反16与I.0 用户模式切换 1 -> O.8 -> 故障出现O.0 Def 2 shunt carter Input 1: 不取反I.1 与 3 -> O.0 ->Output 1Input 2: 取反17OR I.0 Filling stationdoor 8.53F2.I7I8O.0 与 11 -> I.2 ->Input 3输入1: 不取反I.1 用户模式切换 1 -> O.2 -> SHUNT PORTE 10输入2: 不取反18OR I.0 Filling stationdoor 9.54F1.I1I2O.0 与 11 -> I.3 ->Input 4输入1: 不取反I.1 用户模式切换 1 -> O.3 -> SHUNT PORTE 11输入2: 不取反36OR I.0 Filling stationdoor 7.53F2.I5I6O.0 与 11 -> I.0 ->Input 1输入1: 不取反I.1 用户模式切换 1 -> O.1 -> SHUNT PORTE 9输入2: 不取反37与I.0 OR 14 -> O.0 -> Door7 OK O.0 与 12 -> I.1 ->Input 2Input 1: 不取反I.1 OR 5 -> O.0 -> Door6 OKInput 2: 不取反I.2 OR 9 -> O.0 -> Door8 OKInput 3: 不取反I.3 OR 10 -> O.0 -> Door9 OKInput 4: 不取反I.4 OR 8 -> O.0 ->Défaut shuntInput 5: 取反38与I.0 与 0 -> O.0 ->Synthése portes 1/2O.0 Portes OK Input 1: 不取反I.1 与 11 -> O.0 ->Synthése portes 2/2Input 2: 不取反5.3.1.2.Page 2否名称输入输出设置中19用户模式切换I.0 Mode setting.52F2.I5O.0 OR 11 -> I.0 -> 输入1差异时间: 200 msI.1 Mode manual.52F2.I6O.1 OR 11 -> I.1 -> 输入2I.2 Mode auto.52F2.I7O.2 OR 11 -> I.2 -> 输入3I.3 Mode empyting.52F2.I8O.3 OR 11 -> I.3 -> 输入420OR I.0 用户模式切换 2 -> O.0 -> 输出 1O.0 与 8 -> I.1 -> Input 2输入1: 不取反I.1 用户模式切换 2 -> O.1 -> 输出 2O.0 重新启动 0 -> I.1-> 释放 1输入2: 不取反I.2 用户模式切换 2 -> O.2 -> 输出 3输入3: 不取反I.3 用户模式切换 2 -> O.3 -> 输出 4输入4: 不取反21与I.0 Filling emergency stop.51F1.I3I4O.0 与 7 -> I.0 -> Input 1Input 1: 不取反I.1 Output conveyor emergency stop.51F1.I5I6O.0 与 9 -> I.0 -> Input 1Input 2: 不取反22OR I.0 Operator panel Rearming BP.51F1.I7O.0 重新启动 0 -> I.0-> 重新启动输入1: 不取反I.1 Output conveyor Rearming BP.51F1.I8O.0 重新启动 1 -> I.0-> 重新启动输入2: 不取反23与I.0 与 6 -> O.0 ->Output 1O.0 重新启动 0 -> I.2-> 释放 2Input 1: 不取反I.1 Portes OKInput 2: 不取反24重新启动I.0 OR 12 -> O.0 -> 输出 1O.0 EDM 0 -> I.2 -> 控制最短重启脉冲时间: 100 msI.1 OR 11 -> O.0 -> 输出 1O.0 阀门监视 0 -> I.0 -> 控制 1I.2 与 7 -> O.0 ->Output 1O.1 未连接O.2 未连接25EDM I.0 Ctrl 51KM1 &51KM2.51F1.I1O.0 Défaut CG 51KM1 -51KM2最大反馈延时: 1000 msI.2 重新启动 0 -> O.0 -> 启用O.1 51KM1 &51KM2.51F1.Q1Q2O.2 路由 1:N 0 -> I.0 -> 输入26阀门监视I.0 重新启动 0 -> O.0-> 启用O.0 Filling air valve400Y1.51F2.Q1复位条件: 自动复位I.2 Filling air valveCtrl.51F2.I5O.1 未连接当阀门处于活动状态时连续监视: 未激活O.4 Défaut EVG阀门模式: 单最大打开反馈延时: 0 ms最大关闭反馈延时: 0 ms最小复位脉冲时间: 100 ms27路由 1:N I.0 EDM 0 -> O.2 ->Output 2O.0 Welding inhibition. 52F1.Q1O.1 EDM 3 -> I.2 -> 控制O.2 与 10 -> I.0 -> Input 1O.3 与 8 -> I.0 -> Input 128与I.0 路由 1:N 0 -> O.3-> 输出 4O.0 路由 1:N 1 -> I.0-> 输入Input 1: 不取反I.1 OR 11 -> O.0 -> 输出 1Input 2: 不取反29路由 1:N I.0 与 8 -> O.0 ->Output 1O.0 Right plate validation211KM2.51F2.Q3 O.1 left plate validation211KM3.51F2.Q430EDM I.0 STO Fillinginverterfeedback.54F1.I7O.0 Défaut STO Filling最大反馈延时: 1000 msI.2 路由 1:N 0 -> O.1 -> 输出 2O.1 STO filling inverter.54F1.Q1 O.2 未连接31与I.0 与 6 -> O.0 ->Output 1O.0 重新启动 1 -> I.1-> 释放 1Input 1: 不取反I.1 Weighing station doors & flap.51F2.I1I2O.0 与 10 -> I.1 ->Input 2Input 2: 不取反I.2 Output conveyor endswitch.51F2.I3I4Input 3: 不取反32重新启动I.0 OR 12 -> O.0 -> 输出 1O.0 阀门监视 1 -> I.0-> 控制 1最短重启脉冲时间: 100 msI.1 与 9 -> O.0 ->Output 1O.1 未连接O.2 未连接33阀门监视I.0 重新启动 1 -> O.0-> 启用O.0 Output conveyor airvalve 400Y2.51F2.Q2复位条件: 自动复位I.2 Output conveyor airvalve Ctrl.51F2.I6O.1 未连接当阀门处于活动状态时连续监视: 未激活O.4 Défaut EV balance阀门模式: 单最大打开反馈延时: 0 ms最大关闭反馈延时: 0 ms最小复位脉冲时间: 100 ms34与I.0 路由 1:N 0 -> O.2-> 输出 3O.0 EDM 4 -> I.2 -> 控制Input 1: 不取反I.1 与 9 -> O.0 ->Output 1Input 2: 不取反35EDM I.0 STO Output conveyorinverterfeedback.54F1.I8O.0 Défaut STO OutputConveyor最大反馈延时: 1000 msI.2 与 10 -> O.0 -> Output 1O.1 STO output conveyor inverter.54F1.Q2O.2 未连接5.4.I/O 模块5.4.1.CPU0 - IO标签名称24V A150F1 电源0V A25.4.1.1.接线图5.4.2.51F15.4.2.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0741V 3.10.0-1.7.0.101 V 1.xx 15.4.2.2.输入模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]224VI1EDM (单通道) / Ctrl 51KM1& 51KM20----324VI2急停,ES21 (单通道)0----424VI7复位 (单通道) / Operatorpanel Rearming BP0----524VI8复位 (单通道) / Outputconveyor Rearming BP 0----6X1X2I3I4急停,ES21 (双通道) /Filling emergency stop 0300020020011--7X1X2I5I6急停,ES21 (双通道) /Output conveyor emergencystop300020020011--5.4.2.3.输出模式标题/标记名称8Q1Q2电机接触器 (双通道) / 51KM1 & 51KM25.4.2.4.电源标题/标记名称124V0VA1A251F1 电源5.4.2.5.接线图5.4.3.51F25.4.3.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0815V 3.10.0-1.7.0.101 V 1.xx 25.4.3.2.输入模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]224VI5感应接近开关 (单通道NO) /Filling air valve Ctrl 0----324VI6感应接近开关 (单通道NO) /Output conveyor air valveCtrl----424VI7急停,ES21 (单通道)0----524VI8急停,ES21 (单通道)0----10X1X2I1I2安全开关 (双通道) /Weighing station doors &flap40020020011--11X1X2I3I4安全开关 (双通道) / Outputconveyor end switch040020020011--模式标题/标记名称6Q1阀门 (单通道) / Filling air valve 400Y17Q2阀门 (单通道) / Output conveyor air valve 400Y28Q3电机接触器 (单通道) / Right plate validation 211KM29Q4电机接触器 (单通道) / left plate validation 211KM35.4.3.4.电源标题/标记名称124V0V A1A251F2 电源5.4.3.5.接线图5.4.4.52F15.4.4.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0739V 3.10.0- 1.7.0.101 V 1.xx3模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]224VI1模式切换 (40551) / No doorinhibited0----324VI2模式切换 (40551) / Door 1inhibited0----424VI3模式切换 (40551) / Door 2inhibited0----524VI4模式切换 (40551) / Door 3inhibited0----624VI5模式切换 (40551) / Door 4inhibited0----724VI6模式切换 (40551) / Door5inhibited0----824VI7模式切换 (40551) / Door 6inhibited0----924VI8模式切换 (40551) / Door 7inhibited----5.4.4.3.输出模式标题/标记名称10Q1PNP 输出 (单通道) / Welding inhibition5.4.4.4.电源标题/标记名称124V0VA1A252F1 电源5.4.4.5.接线图5.4.5.52F25.4.5.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0809V 3.10.0-1.7.0.101 V 1.xx 45.4.5.2.输入模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]224VI1模式切换 (40547) / Door 8inhibited0----324VI2模式切换 (40547) / Door 9inhibited0----424VI3模式切换 (40547) / Door 10inhibited0----524VI4模式切换 (40547) / Door 11inhibited0----624VI5模式切换 (40547) / Modesetting0----724VI6模式切换 (40547) / Modemanual0----824VI7模式切换 (40547) / Modeauto----关开时间[ms][ms]期[ms]隔[ms]延迟 [ms]924V I8模式切换 (40547) / Modeempyting0----5.4.5.3.电源标题/标记名称124V0V A1A252F2 电源5.4.5.4.接线图5.4.6.53F15.4.6.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0805V 3.10.0- 1.7.0.101 V 1.xx5 5.4.6.2.输入关开时间[ms][ms]期[ms]隔[ms]延迟 [ms]224V24V I1I2T4000 Direct (非接触式联锁转发器,第 4 类) / Filling station door 1-100---324V24V I3I4T4000 Direct (非接触式联锁转发器,第 4 类) / Filling station door 2-100---424V24V I5I6T4000 Direct (非接触式联锁转发器,第 4 类) / Filling station door 3-100---524V24VI7I8T4000 Direct (非接触式联锁转发器,第 4 类) / Filling station door 4-100---5.4.6.3.电源标题/标记名称124V0VA1A253F1 电源5.4.6.4.接线图5.4.7.53F25.4.7.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0807V 3.10.0- 1.7.0.101 V 1.xx6 5.4.7.2.输入模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]224V24V I1I2T4000 Direct (非接触式联锁转发器,第 4 类) / Fillingstation door 5-100---324V24V I3I4T4000 Direct (非接触式联锁转发器,第 4 类) / Fillingstation door 6-100---424V24V I5I6T4000 Direct (非接触式联锁转发器,第 4 类) / Fillingstation door 7-100---524V24V I7I8T4000 Direct (非接触式联锁转发器,第 4 类) / Fillingstation door 8-100---5.4.7.3.电源标题/标记名称124V0V A1A253F2 电源5.4.7.4.接线图5.4.8.54F15.4.8.1.一般信息类型代码序列号软件版本硬件版本版本/步骤地址FX3-XTIO840021533 0803V 3.10.0-1.7.0.101 V 1.xx 75.4.8.2.输入模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]224VI3急停,ES21 (单通道)0----324VI4急停,ES21 (单通道)0----424VI5急停,ES21 (单通道)0----524VI6急停,ES21 (单通道)0----624VI7单通道NC (单通道) / STOFilling inverter feedback 0----724VI8单通道NC (单通道) / STO Output conveyor inverterfeedback----模式标题/标记名称开 -关关 -开滤波时间[ms]Dis.[ms]测试周期[ms]测试间隔[ms]最大关开延迟 [ms]1024V24V I1I2T4000 Direct (非接触式联锁转发器,第 4 类) / Fillingstation door 9-100---5.4.8.3.输出模式标题/标记名称8Q1PNP 输出 (单通道) / STO filling inverter9Q2PNP 输出 (单通道) / STO output conveyor inverter5.4.8.4.电源标题/标记名称124V0VA1A254F1 电源5.4.8.5.接线图5.5.路由5.5.1.GCAN - 路由5.5.1.1.CPU 到网络更新间隔 [ms]8TxPDO1[字节 0] 字节 0[0.7]Résultat 0.7[0.6]Résultat 0.6[0.5]Défaut EV balance [0.4]Défaut EVG[0.3]Dde réarrmement[0.2]OK pour réarmer[0.1]Défaut mode de marche [0.0]Défaut shunt portes[字节 1] 字节 1[1.7][1.6][1.5][1.4]Défaut STO OutputConveyor[1.3]Défaut STO Filling[1.2]Résultat 1.2[1.1]Résultat 1.1[1.0]Défaut CG 51KM1 -51KM2[字节 4] 模块 0 [51F1][4.7]Output conveyorRearming BP.51F1.I8[4.6]Operator panelRearming BP.51F1.I7[4.5]-[4.4]Output conveyor emergencystop.51F1.I5I6[4.3]-[4.2]Filling emergencystop.51F1.I3I4[4.1]急停,ES21.51F1.I2[4.0]Ctrl 51KM1 &51KM2.51F1.I1[字节 5] 模块 1 [51F2][5.7]急停,ES21.51F2.I8[5.6]急停,ES21.51F2.I7[5.5]Output conveyor airvalve Ctrl.51F2.I6[5.4]Filling air valve Ctrl.51F2.I5[5.3]-[5.2]Output conveyor endswitch.51F2.I3I4[5.1]-[5.0]Weighing station doors &flap.51F2.I1I2[字节 6] 模块 2 [52F1][6.7]Door 7inhibited.52F1.I8[6.6]Door 6inhibited.52F1.I7[6.5]Door5inhibited.52F1.I6[6.4]Door 4inhibited.52F1.I5[6.3]Door 3inhibited.52F1.I4[6.2]Door 2inhibited.52F1.I3[6.1]Door 1inhibited.52F1.I2[6.0]No door inhibited.52F1.I1[字节 7] 模块 3 [52F2][7.7]Modeempyting.52F2.I8[7.6]Mode auto.52F2.I7[7.5]Mode manual.52F2.I6[7.4]Mode setting.52F2.I5[7.3]Door 11 inhibited.52F2.I4[7.2]Door 10 inhibited.52F2.I3[7.1]Door 9inhibited.52F2.I2[7.0]Door 8inhibited.52F2.I1TxPDO2[字节 8] 模块 4 [53F1][8.7]-[8.6]Filling station door4.53F1.I7I8[8.5]-[8.4]Filling station door 3.53F1.I5I6[8.3]-[8.2]Filling station door2.53F1.I3I4[8.1]-[8.0]Filling station door 1.53F1.I1I2[字节 9] 模块 5 [53F2][9.7]-[9.6]Filling station door8.53F2.I7I8[9.5]-[9.4]Filling station door 7.53F2.I5I6[9.3]-[9.2]Filling station door6.53F2.I3I4[9.1]-[9.0]Filling station door 5.53F2.I1I2[字节 10] 模块 6 [54F1][10.7]STO Output conveyorinverter feedback.54F1.I8[10.6]STO Filling inverter feedback.54F1.I7[10.5]急停,ES21.54F1.I6[10.4]急停,ES21.54F1.I5[10.3]急停,ES21.54F1.I4[10.2]急停,ES21.54F1.I3[10.1]-[10.0]Filling station door9.54F1.I1I2TxPDO3[字节 16] 模块 0 [51F1][16.7][16.6][16.5][16.4][16.3][16.2][16.1]-[16.0]51KM1 &51KM2.51F1.Q1Q2[字节 17] 模块 1 [51F2][17.7][17.6][17.5][17.4][17.3]left platevalidation 211KM3.51F2.Q4[17.2]Right plate validation 211KM2.51F2.Q3[17.1]Output conveyor air valve 400Y2.51F2.Q2[17.0]Filling air valve 400Y1.51F2.Q1[字节 18] 模块 2 [52F1][18.7][18.6][18.5][18.4][18.3][18.2][18.1][18.0]Welding inhibition.52F1.Q1[字节 22] 模块 6 [54F1][22.7][22.6][22.5][22.4][22.3][22.2][22.1]STO output conveyorinverter.54F1.Q2[22.0]STO fillinginverter.54F1.Q1TxPDO4[字节 28] TxPDO4.B4[28.7]位7[28.6]位6[28.5]位5[28.4]位4[28.3]位3[28.2]位2[28.1]位1[28.0]位0[字节 29] TxPDO4.B5[29.7]位7[29.6]位6[29.5]位5[29.4]位4[29.3]位3[29.2]位2[29.1]位1[29.0]位0[字节 30] TxPDO4.B6[30.7]位7[30.6]位6[30.5]位5[30.4]位4[30.3]位3[30.2]位2[30.1]位1[30.0]位0[字节 31] TxPDO4.B7[31.7]位7[31.6]位6[31.5]位5[31.4]位4[31.3]位3[31.2]位2[31.1]位1[31.0]位05.5.1.2.网络到 CPU更新间隔 [ms]4RxPDO1[0] P1.B0[0.7]位7[0.6]位6[0.5]位5[0.4]位4[0.3]位3[0.2]位2[0.1]位1[0.0]位0[1] P1.B1[1.7]位7[1.6]位6[1.5]位5[1.4]位4[1.3]位3[1.2]位2[1.1]位1[1.0]位0[2] P1.B2[2.7]位7[2.6]位6[2.5]位5[2.4]位4[2.3]位3[2.2]位2[2.1]位1[2.0]位0[3] P1.B3[3.7]位7[3.6]位6[3.5]位5[3.4]位4[3.3]位3[3.2]位2[3.1]位1[3.0]位05.6.设备设置5.6.1.GCAN - 设备设置常规配置CANopen 总线地址波特率4500 kbps设备状态CANopen 总线地址CANopen 波特率4500 kbps6.I/O 概览6.1.I/O 模块XTIO[1]Ctrl 51KM1 &51KM2.51F1.I1Page 2FB25 EDM EDM反馈51KM1 &51KM2.51F1.Q1Q2Page 2FB25 EDM Output 1Filling emergency stop.51F1.I3I4Page 2FB21 与 Input 1Output conveyor emergency stop.51F1.I5I6Page 2FB21 与 Input 2Operator panel RearmingBP.51F1.I7Page 2FB22 OR 输入1Output conveyor RearmingBP.51F1.I8Page 2FB22 OR 输入2XTIO[2]Weighingstation doors &flap.51F2.I1I2Page 2FB31 与 Input 2Filling airvalve400Y1.51F2.Q1Page 2FB26 阀门监视 输出 1aOutputconveyor airvalve400Y2.51F2.Q2Page 2FB33 阀门监视 输出 1aOutputconveyor endswitch.51F2.I3I4Page 2FB31 与 Input 3Right platevalidation211KM2.51F2.Q3Page 2FB29 路由 1:N 输出 1left platevalidation211KM3.51F2.Q4Page 2FB29 路由 1:N 输出 2Filling airvalve Ctrl.51F2.I5Page 2FB26 阀门监视 反馈 1Outputconveyor airvalve Ctrl.51F2.I6Page 2FB33 阀门监视 反馈 1XTIO[3]No doorinhibited.52F1.I1Page 1FB0 用户模式切换 输入1Page 1FB12 与 Input 1Weldinginhibition.52F1.Q1Page 2FB27 路由 1:N 输出 1Door 1inhibited.52F1.I2Page 1FB0 用户模式切换 输入2Page 1FB12 与 Input 2Door 2inhibited.52F1.I3Page 1FB0 用户模式切换 输入3Page 1FB12 与 Input 3Door 3inhibited.52F1.I4Page 1FB0 用户模式切换 输入4Page 1FB12 与 Input 4Door 4inhibited.52F1.I5Page 1FB0 用户模式切换 输入5Page 1FB12 与 Input 5Door5inhibited.52F1.I6Page 1FB0 用户模式切换 输入6Page 1FB12 与 Input 6Door 6inhibited.52F1.I7Page 1FB0 用户模式切换 输入7Page 1FB12 与 Input 7Door 7inhibited.52F1.I8Page 1FB9 用户模式切换 输入2Page 1FB12 与 Input 8XTIO[4]Door 8inhibited.52F2.I1Page 1FB9 用户模式切换 输入3Page 1FB13 与 Input 1Door 9inhibited.52F2.I2Page 1FB9 用户模式切换 输入4Page 1FB13 与 Input 2Door 10inhibited.52F2.I3Page 1FB9 用户模式切换 输入5Page 1FB13 与 Input 3Door 11inhibited.52F2.I4Page 1FB9 用户模式切换 输入6Page 1FB13 与 Input 4Mode setting.52F2.I5Page 2FB19 用户模式切换 输入1Mode manual.52F2.I6Page 2FB19 用户模式切换 输入2Modeauto.52F2.I7Page 2FB19 用户模式切换 输入3Modeempyting.52F2.I8Page 2FB19 用户模式切换 输入4XTIO[5]Fillingstation door1.53F1.I1I2Page 1FB1 OR 输入1Fillingstation door2.53F1.I3I4Page 1FB2 OR 输入1Fillingstation door3.53F1.I5I6Page 1FB3 OR 输入1Fillingstation door4.53F1.I7I8Page 1FB4 OR 输入1XTIO[6]Fillingstation door5.53F2.I1I2Page 1FB5 OR 输入1Fillingstation door6.53F2.I3I4Page 1FB6 OR 输入1Fillingstation door7.53F2.I5I6Page 1FB36 OR 输入1Fillingstation door8.53F2.I7I8Page 1FB17 OR 输入1XTIO[7]Fillingstation door9.54F1.I1I2Page 1FB18 OR 输入1STO filling inverter.54F1.Q1Page 2FB30 EDM Output 1STO output conveyorinverter.54F1.Q2Page 2FB35 EDM Output 1STO Filling inverterfeedback.54F1.I7Page 2FB30 EDM EDM 反馈。