单片机程序编码器
51单片机编码
51单片机编码单片机编码技术是现代电子信息技术中的重要组成部分。
作为微控制器的核心,单片机编码通过将输入的数据信息转换为特定的编码方式,实现各种功能和应用。
本文将从基本概念、编码原理和应用实例等方面,详细介绍51单片机编码相关内容。
1. 51单片机编码的基本概念51单片机编码是指使用8051系列单片机进行程序设计和编码的过程。
它采用汇编语言或高级语言编写程序代码,并将其转化为机器码,通过单片机的指令集执行相应的操作。
由于其成熟的硬件平台和丰富的软件资源,51单片机编码广泛应用于各种嵌入式系统、控制系统等领域。
2. 51单片机编码的原理51单片机编码的原理主要包括指令集、寄存器、数据存储器、输入输出端口等组成部分。
指令集是单片机内部存储的一组机器指令,通过不同的指令实现对数据的处理和控制。
寄存器用于存储临时数据和程序状态等信息,提供给CPU进行运算和控制。
数据存储器则用于存储程序代码和数据,包括内部RAM和外部ROM等。
输入输出端口是单片机与外部设备进行交互的接口,通过读取输入端口的状态和向输出端口写入数据,实现与外部环境的通信。
3. 51单片机编码的应用实例3.1 系统控制应用51单片机编码广泛应用于各种系统控制应用中,如智能家居、工业自动化、交通信号控制等。
通过编写相应的控制程序代码,将输入的传感器信号处理后,控制相关的执行机构进行动作。
例如,通过读取温度传感器的数据,控制空调的开关和温度调节,实现智能环境控制。
3.2 嵌入式系统应用嵌入式系统是指将计算能力嵌入到各种设备和系统中,实现特定功能的计算系统。
51单片机编码在嵌入式系统中有广泛的应用,如智能手机、电视、汽车电子等。
通过编写嵌入式软件程序,控制和管理功耗、资源调度、外设驱动等,实现嵌入式系统的各项功能。
3.3 通信系统应用51单片机编码在通信系统中也有着重要的应用。
例如,通过编写相应的通信协议和驱动程序,实现与外部设备的数据交换和通信。
stm32 编码器4倍频原理

标题:STM32编码器4倍频原理目录1. STM32编码器接口简介2. 编码器的工作原理和应用3. STM32编码器4倍频原理4. STM32编码器4倍频的优势5. 结论1. STM32编码器接口简介STM32系列微控制器是由意法半导体推出的一类MCU产品,具有丰富的外设和强大的性能。
其中,编码器接口是STM32微控制器常见的外设之一,主要用于连接编码器传感器,实现位置或速度的测量和控制。
STM32编码器接口通常包含两个通道(A相和B相)和一个索引信号(Z 相),用于测量编码器的旋转角度和速度。
STM32还提供了丰富的编码器接口工作模式和配置选项,以满足不同应用场景的需求。
2. 编码器的工作原理和应用编码器是一种用于测量旋转角度和速度的传感器,常见的编码器类型包括光电编码器和磁性编码器。
编码器的工作原理是利用编码盘上的光、电、磁信号来生成对应的数字脉冲输出,从而实现旋转角度和速度的测量。
在工业控制和自动化领域,编码器被广泛应用于电机位置控制、轴位移测量和运动控制等领域。
特别是在闭环控制系统中,编码器可以提供准确的位置反馈信号,从而实现精准的位置控制和运动控制。
3. STM32编码器4倍频原理在STM32微控制器中,编码器接口提供了多种工作模式和编码器计数模式。
其中,4倍频模式是一种常用的编码器计数模式,可以有效提高编码器的分辨率和测量精度。
在4倍频模式下,编码器接口可以将编码器信号的脉冲数量扩大4倍输出给微控制器的定时器,从而实现对编码器脉冲数量的有效倍增。
通过4倍频模式,可以在不改变编码器硬件结构的情况下,有效提高编码器的分辨率和灵敏度。
4. STM32编码器4倍频的优势使用STM32编码器4倍频模式具有以下优势:a. 提高分辨率:通过4倍频模式,可以将编码器信号的脉冲数量扩大4倍输出给微控制器的定时器,从而提高了编码器的分辨率和测量精度。
b. 提高灵敏度:4倍频模式可以将编码器的脉冲信号有效放大,从而提高了编码器的灵敏度和反馈精度,在闭环控制系统中具有重要作用c. 保持硬件兼容性:使用4倍频模式可以在不改变编码器硬件结构的情况下,有效提高了编码器的性能,同时保持了硬件的兼容性和稳定性。
单片机编码器编程实例

单片机编码器编程实例一、引言单片机编码器是一种常见的传感器,它能够将旋转或直线运动转换为电信号,从而为控制系统提供所需的反馈信息。
在许多工业应用中,单片机编码器被广泛用于检测设备的运动状态、速度和位置等参数。
本文将介绍一种基于单片机的编码器编程实例,帮助读者了解如何实现编码器的数据采集和解析。
二、编码器介绍1. 编码器类型编码器根据其工作原理和接口类型可分为多种类型,如光电编码器、霍尔编码器、磁电编码器等。
在本例中,我们将使用一种常见的光电编码器作为传感器。
2. 编码器信号输出编码器通常以脉冲信号的形式输出,每个脉冲代表一定的距离或角度。
编码器的输出信号通常为方波信号,可以通过单片机的计数器模块进行采集和处理。
三、单片机编程实例1. 硬件连接将编码器与单片机通过适当的接口(如串口、I2C、SPI等)进行连接。
确保编码器的电源和地线正确连接到单片机的电源和地线。
2. 软件编程使用适合单片机的编程语言(如C/C++)编写程序,实现编码器的数据采集和解析。
下面是一个简单的示例程序:(1)初始化计数器模块,设置计数频率和溢出时间等参数。
(2)在主循环中,不断检测计数器的值是否溢出,若溢出则说明有新的脉冲信号到达。
(3)根据计数器的值计算出当前的位置或速度等信息。
(4)将解析后的数据保存到本地或通过串口发送给其他设备。
以下是一个简单的C语言代码示例:// 示例代码:单片机编码器编程实例#include <reg52.h> // 包含51系列单片机的寄存器定义sbit encoder_pin = P1^0; // 定义编码器信号输入端口void main() {while(1) { // 主循环// 初始化计数器模块counter_init();// 设置计数频率和溢出时间等参数counter_set();while(counter_get() == 0); // 等待计数器溢出// 解析计数器的值,计算位置或速度等信息position = counter_get(); // 假设每次计数值代表一个单位距离,可以根据实际情况进行调整// 将解析后的数据保存到本地或发送给其他设备data = position; // 这里仅作示例,实际应用中需要根据具体需求进行处理和存储}} // 主函数结束在上述示例代码中,我们使用了一个简单的while循环来实现主循环,通过调用相应的函数对编码器数据进行采集和解析。
单片机中编码器的作用和功能

单片机中编码器的作用和功能1.引言1.1 概述概述部分的内容可以描述单片机中编码器的作用和功能的基本概念和背景信息。
具体内容如下:概述编码器是一种常见的电子设备,用于将机械或电气信号转化为数字信号。
它通过将物理过程或运动转换为相应的数字编码,以便供计算机或其他电子系统进行处理和控制。
在单片机中,编码器起到了至关重要的作用,广泛应用于各种行业和领域,如工业自动化、机器人控制、电子仪器仪表等。
编码器的功能主要包括位置检测、运动控制和位置反馈等。
通过编码器,单片机可以实时获取和监测物体或装置的位置信息,并根据需求进行相应的控制和调整。
编码器可以实现高精度的位置测量和运动控制,并且具有快速响应、稳定性好的特点。
单片机中常用的编码器有两种类型:增量式编码器和绝对式编码器。
增量式编码器通过计算脉冲信号的变化来确定物体或装置的位置和方向,适用于测量和控制旋转角度和线性位置。
而绝对式编码器可以直接读取出物体或装置的绝对位置信息,不受电源断电影响,具有位置信息不丢失的特点。
在单片机中,编码器的应用非常广泛。
它可以用于控制电机的位置、速度和加减速度,实现精确的运动控制。
同时,编码器也可以用于测量和校准各种仪器仪表的位置和角度,提高测量精度和准确性。
此外,编码器还可以应用于各种机器人系统,如工业机器人、服务机器人等,实现自动化控制和智能操作。
总之,编码器在单片机中扮演着不可或缺的角色,具有重要的作用和功能。
它不仅可以实现位置检测和运动控制,还可以提高系统的稳定性、精确性和实时性。
随着科技的不断进步和应用需求的不断增长,编码器的发展前景十分广阔,将会在更多领域和行业得到应用和推广。
1.2文章结构文章结构部分主要介绍了文中内容的组织架构,以及各个章节的主要内容概述。
通过文章结构的介绍,读者能够更好地理解文章的整体构架和内容安排,有助于读者更好地把握文章的主旨和重点。
在本文中,文章结构可以按照以下方式进行介绍:文章的结构可以分为引言、正文和结论三个部分。
单片机操作旋转编码器

.最近做了一个关于旋转编码器的项目,在网上查阅了很多资料,然后又是进行了诸多的实验,分享给大家。
1 旋转编码器原理(借用一下别的文档里的图片)5脚的旋转编码开关具有左转,右转,按下三个功能。
2脚接地,1,3脚接上拉电阻。
4脚,5脚是按下功能的两个脚,可以根据需求自己接线。
检查方向时,通常采用两种做法.的上升沿或下跳沿,在中断程序中,检测此时另外获取(1)中断法:A或B相为高电平一相的电平。
例如上图中,A相上跳沿,相为低电平则为顺时针转动;BB 二者为逆时针方向转动。
不相同时,则能判,BAB)电平法:同时检测A相和相的电平,当出现2 (B相的电平,则能判断出转动的方向。
定发生了转动,根据前一时刻A相和硬件电路2本设计在PIC16单片机上进行开发,采用中断法。
旋转编码开关输出上拉,之后采用RC 滤波器对信号进行先一步滤波,此处的RC滤波器的元器件大小可以适当调整。
中断源采用的是捕捉模块(CCP2)的捕捉中断(外部中断用于别处)。
3 C代码中断响应函数:void interrupt ISR(void){if(CCP2IF){CCP2IF=0;Change();}// 程序中CCP2设置成捕捉下跳沿void Change(){...unsigned int t2=2000;if(RC3)// 高电平{while((!RC1)&&(t2--))//等待RC1的低电平持续完{Delay();}的电平,以确认转动发生if(!RC3)//判断此时RC3{// 增或减操作}else{while((!RC1)&&(t2--))//等待RC1的低电平持续完{Delay();}RC3if(RC3)//判断此时的电平,以确认转动发生{// 增或减操作}}}注意事项:4滤波电路,延迟时间等均需要根据具体的旋转开关进行调整。
一般的单片机程序中,并不建议在中断中添加延迟函数,但应视具体情况而定。
单片机操作旋转编码器

检查方向时,通常采用两种做法
(1)中断法:获取A或B的上升沿或下跳沿,在中断程序中,检测此时另外一相的电平。例如上图中,A相上跳沿,B相为低电平则为顺时针转动;B相为高电平二者为逆时针方向转动。
(2)电平法:同时检测A相和B相的电平,当出现A,B不相同时,则能判定发生了转动,根据前一时刻A相和B相的电平,则能判断出转动的方向。
同时检测相的电平当出现不相同时则能判定发生了转动根据前一时刻硬件电路本设计在pic16单片机上进行开发采用中断法
最近做了一个关于旋转编码器的项目,在网上查阅了很多资料,然后又是进行了诸多的实验,分享给大家。
1旋转编码器原理
(借用一下别的文档里的图片)
5脚的旋转编码开关具有左转,右转,按下三个功能。2脚接地,1,3脚接上拉电阻。
2硬件电路
本设计在PIC16单片机上进行开发,采用中断法。
旋转编码开关输出上拉,之后采用RC滤波器对信号进行先一步滤波,此处的RC滤波器的元器件大小可以适当调整。中断源采用的是捕捉模块(CCP2)的捕捉中断(外部中断用于别处)。
3 C代码
中断响应函数:
voidinterrupt ISR(void)
{
if(CCP2IF)
{
CCP2IF=0;
Change();
}//程序中CCP2设置成捕捉下跳沿
}
void Change()
{
unsigned int t2=2000;
if(RC3)//高电平
{
while((!RC1)&&(t2--))//等待RC1的低电平持续完
{
Delay();
}
if(!RC3)//判断此时RC3的电平,以确认转动发生
单片机实现遥控编码器PT2262的软件解码

基于单片机实现遥控编码器PT2262的软件解码1 引言PT2262是红外遥控编码器,PT2272是其接收解码器,两者常常配对使用,现已广泛用于汽车门控、遥控门锁、门禁管理等领域,也可用于传送数字信息。
PT2262具有19位二进制编码功能;P T2272的解码只有4~6位,这就限制了数据传输的应用。
在此从PT2262接收的信号特征入手,利用8051F330单片机直接对接收到的信号进行解码,解释出PT2262发出的全部19位数据,从而使其应用于数字通信、智能化控制等领域。
2 硬件电路图1是发射装置的原理图,PT2262作为编码器,当按下按键时,设定的地址码和数据码从17引脚串行输出,经红外发射元件IRED发出信号。
通过电阻Rosc凋节发射频率,适当提高PT2262工作电压(2.6 V~15 V),以增大发射距离。
其中A0~A12可设置为高电平、低电平、悬空三种状态,因此可以发送531441种编码组合,完全满足设计需求。
接收装置采用集红外线接收、放大、整形于一体的集成电路TL0038,无需任何外接元件,就能完成从红外线接收到输出与TTL电平信号兼容的所有工作,故适用于各种红外线遥控和红外线数据传输。
译码采用8051F330D单片机,11.0592MHz晶体振荡器,接收信号送至I/O端口P1.0进行软件解码。
接收和译码电路如图2所示。
3 解码原理编码器PT2262发送的编码信号是由:地址码、数据码、同步码组成的一个完整码字,最多可以有12位(A0~A11)三态地址端引脚(悬空、高电平、低电平),任意组合可提供531 441个地址码。
将编码器PT2262的A8拉高,D3拉高,D0拉高,D1拉低,其余悬空。
截取一段接收模块信号输出波形如图3所示,PT2262每发射一次,至少发送4组相同编码字码。
每组字码间隔(低电平)约14 ms。
将其截获波形每组字码放大,如图4所示,一组字码有12位A/D码,每个A/D位是由2个脉冲表示:2个窄脉冲则表示“0”;2个宽脉冲表示“1”;1个窄脉冲和1个宽脉冲表示“F”即地址码“悬空”;除此之外,每组字码之间还有1个同步码隔开,所以每组字码共计有25个宽度不同的脉冲。
STM32 编码器程序
STM32 编码器连接STM32的每个TIMER都有正交编码器输入接口,TI1,TI2经过输入滤波,边沿检测产生TI1FP1,TI2FP2接到编码器模块,通过配置编码器的工作模式,即可以对编码器进行正向/反向计数。
如下图,编码器使用了A,B两相信号,但是我只需要对TI1信号进行计数(第一行),我也是刚发现了这个错误,原来对两个信号都计数,导致码盘转一周得到不止100个脉冲(100线的光电码盘)。
通过STM32的编码器模块比较两想的电平信号就可以很容易地计算出编码器的运行情况了。
下面是我调试OK的代码:void Encoder_Configration(void){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_ICInitTypeDef TIM_ICInitStructure;//PC6 A相PC7 B相GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOC,&GPIO_InitStructure);/* Enable the TIM3 Update Interrupt *//*NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = TIMx_PRE_EMPTION_PRIORITY;NVIC_InitStructure.NVIC_IRQChannelSubPriority = TIMx_SUB_PRIORITY;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);*//* Timer configuration in Encoder mode */TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescalingTIM_TimeBaseStructure.TIM_Period = 10000;TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);TIM_EncoderInterfaceConfig(TIM8, TIM_EncoderMode_TI12,TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter = 6;//ICx_FILTER;TIM_ICInit(TIM8, &TIM_ICInitStructure);// Clear all pending interruptsTIM_ClearFlag(TIM8, TIM_FLAG_Update);TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE);//Reset counterTIM2->CNT = 0;TIM_Cmd(TIM8, ENABLE);}n_Counter = TIM_GetCounter(TIM8);Diled_Disp_Num((float)n_Counter);另外一个值得注意的问题是,STM32 的定时器是16位的,意思是只能计数到65535,有两种方法,一是采用链式的方式用两个定时器将16位扩展为32位,还有一种简单的方法就是开启定时器的溢出中断,每中断一次就代表编码器运转了特定的角度。
基于Arduino单片机的增量式编码器模拟装置设计
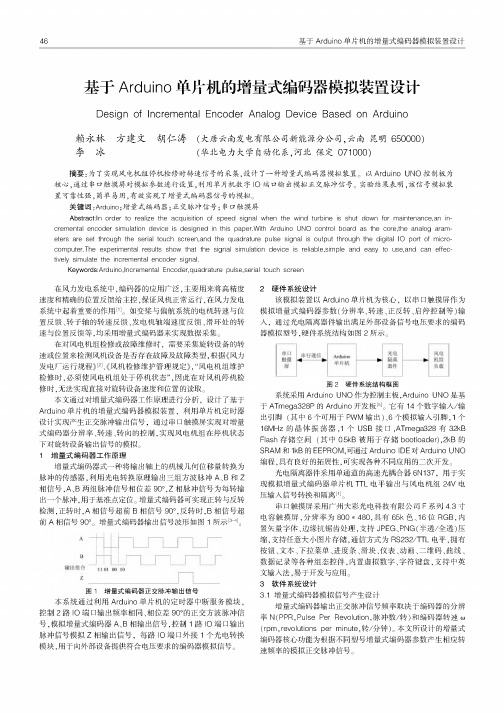
46基于Arduino单片机的增量式编码器模拟装置设计基于Arduino单片机的增量式编码器模拟装置设计Desig n of In c reme ntal En coder An a log Device Based on Ardu ino赖永林方建文胡仁涛(大唐云南发电有限公司新能源分公司,云南昆明650000)李冰(华北电力大学自动化系,河北保定071000)摘要:为了实现风电机组停机检修时转速信号的采集,设计了一种增量式编码器模拟装置。
以Arduino UNO控制板为核心,通过串口触摸屏对模拟参数进行设置,利用单片机数字IO端口输出模拟正交脉冲信号。
实验结果表明,该信号模拟装置可靠性强,简单易用,有效实现了增量式编码器信号的模拟。
关键词:Arduino;增量式编码器;正交脉冲信号曰串口触摸屏Abstract:"order to realize the acquisition of speed signal when the wind turbine is shut down for maintenance,an incremental encoder simulation device is designed in this paper.With Arduino UNO control board as the core,the analog aram-eters are set through the serial touch screen,and the quadrature pulse signal is output through the digital IO port of micro-computer.The experimental results show that the signal simulation device is reliable,simple and easy to use,and can effectively simulate the incremental encoder signal.Keywords:Arduino,Incremental Encoder,quadrature pulse,serial touch screen在风力发电系统中,编码器的应用广泛,主要用来将高精度速度和精确的位置反馈给主控,保证风机正常运行,在风力发电系统中起着重要的作用[1]遥如变桨与偏航系统的电机转速与位置反馈、转子轴的转速反馈、发电机轴端速度反馈、滑环处的转速与位置反馈等,均采用增量式编码器来实现数据采集遥在对风电机组检修或故障维修时,需要采集旋转设备的转速或位置来检测风机设备是否存在故障及故障类型,根据《风力发电厂运行规程》[2],《风机检修维护管理规定》,“风电机组维护检修时,必须使风电机组处于停机状态”,因此在对风机停机检修时,无法实现直接对旋转设备速度和位置的读取。
单片机霍尔传感器测速定时器编码器

单片机是一种集成了微处理器、存储器和一些外设接口的微型计算机系统。
在工业自动化领域,单片机广泛应用于传感器测速定时器编码器中。
而霍尔传感器则是一种常用的传感器,用于检测磁场,特别是用于检测旋转物体的位置和速度。
本文将从以下几个方面来介绍单片机霍尔传感器测速定时器编码器的原理和应用。
一、霍尔传感器的原理1. 霍尔效应的发现和原理霍尔效应是由美国物理学家爱德温·赫尔在1879年首次发现的。
当导体带电流时,如果在导体附近设置一个垂直于导体面的磁场,就会在导体的两侧产生一种电势差,这种现象称为霍尔效应。
2. 霍尔传感器的工作原理霍尔传感器利用霍尔效应来检测磁场。
当磁场与霍尔传感器垂直时,霍尔传感器会产生电势差,进而产生输出信号。
根据输出信号的变化,可以检测到磁场的变化,进而实现对旋转物体的位置和速度的检测。
二、单片机的应用1. 单片机的基本原理单片机是一种集成了微处理器、存储器和一些外设接口的微型计算机系统。
它可以独立工作,也可以作为系统的一部分。
单片机的核心是微处理器,它具有控制功能,可以根据程序进行计算和控制。
2. 单片机的外设接口单片机通常包含各种外设接口,如通用串行总线(USB)、通用异步收发器(UART)、并行输入输出口(PIO)、模拟数字转换器(ADC)等。
这些外设接口可以与传感器、执行器等外部设备进行通信和控制。
三、传感器测速定时器编码器的应用1. 传感器的应用传感器是工业自动化领域中的重要组成部分,它可以将物理量转换成电信号,用于检测环境参数、物体位置和速度等。
在传感器测速定时器编码器中,传感器可以用于检测旋转物体的位置和速度,从而实现对物体的控制和监测。
2. 定时器的应用定时器是单片机中的一种重要外设,它可以用来产生精确的时间基准信号,从而实现对时间的测量和控制。
在传感器测速定时器编码器中,定时器可以用来测量旋转物体的速度和转动周期,从而实现对物体旋转运动的监测和控制。
3. 编码器的应用编码器是一种重要的位置传感器,它可以用来测量旋转物体的角度和方向,从而实现对物体位置的准确监测和控制。
51单片机360度旋转编码器使用代码
51单片机360度旋转编码器使用代码下面是使用51单片机实现360度旋转编码器的代码:```c#include <reg52.h>sbit CLK=P3^0; // CLK引脚定义sbit DT=P3^1; // DT引脚定义unsigned char val = 0; // 表示旋转角度的变量unsigned int i,j;for(j=0;j<150;j++);void mainunsigned char last_state, current_state;unsigned char flag = 0;last_state = (DT<<1) , CLK; // 初始化上一个状态while(1)current_state = (DT<<1) , CLK; // 获取当前状态if (current_state != last_state) // 检测到旋转delay(5); // 延时去抖动if (current_state == ((DT<<1) , CLK)) // 确认旋转方向if (last_state == 0x00) // 顺时针旋转val++;if (val > 255)val = 255;}else // 逆时针旋转if (val > 0)val--;}flag = 1;}while ((DT<<1) , CLK == current_state) //等待旋转结束;}last_state = current_state; // 更新上一个状态if (flag) // 旋转角度变化flag = 0;//执行相应的操作,例如更新液晶显示屏等}//其他需要进行的操作delay(10); // 延时等待下一次旋转检测}```以上是一个简单的示例代码,通过检测旋转编码器的旋转状态变化来实现角度的累加和递减。
具体实现中,可以根据需要进行相应的操作,例如更新液晶显示屏、驱动电机等。
单片机中编码器的作用和功能
单片机中编码器的作用和功能
编码器是一种常见的数字信号处理器件,用于将输入的模拟或数字信号转换为相应的数字编码输出。
在单片机中,编码器主要有以下作用和功能:
1. 位置编码:编码器可以用于测量和确定物体的位置。
通过与转轴或位置相关的装置结合使用,可以测量物体的线性位置或旋转角度,并将其转换为数字编码输出,以便单片机进行处理和控制。
2. 增量式编码:编码器可以将物体的移动或旋转转换为增量的数字编码信号。
当物体移动时,编码器输出的编码信号将相应地增加或减少,单片机可以根据这些变化实时监测和控制物体的位置。
3. 速度测量:编码器还可以通过计算单位时间内编码信号的变化来测量物体的速度。
单片机可以通过识别编码器输出的脉冲信号的频率来计算物体的速度,并根据需要进行相应的控制。
4. 方向检测:编码器的输出信号还可以提供物体的行进方向信息。
通过检测编码器输出信号的变化模式,单片机可以判断物体是向前还是向后移动,并根据需要进行相应的方向控制。
总之,编码器在单片机中的作用和功能主要是将物理量转换为数字编码信号,以便单片机进行数字化处理和控制。
通过编码器,单片机可以对物体的位置、速度和方向进行实时监测和控制,实现精确的位置控制和运动控制。
单片机优先编码器的原理

单片机优先编码器的原理单片机优先编码器是一种将多个输入编码为一个优先级最高的输出的设备。
它常用于识别多个输入信号中的最高优先级信号,并将其编码为数字输出。
单片机优先编码器的原理基于优先级的概念。
输入信号被分为多个优先级,每个优先级对应一个输入端口。
每个输入信号都有一个优先级,较高优先级的信号将覆盖较低优先级的信号。
在单片机优先编码器中,多个输入信号被连接到一个编码器芯片上。
编码器芯片的功能是将多个输入信号编码为一个唯一的数字输出,表示最高优先级的输入信号。
编码器芯片通常由多个逻辑门组成,用于判断每个输入信号的优先级,并选择最高优先级的信号作为输出。
编码器芯片通常具有一个输入端口用于判断输入信号的优先级,并有一个输出端口用于输出最高优先级的信号。
输入端口上的信号经过内部逻辑门的处理后,通过输出端口输出。
如果有多个输入信号的优先级一样,则编码器芯片会选择其中一个作为输出,这个输出可以是固定的,也可以是随机的。
在单片机程序中,编码器芯片的输出通常连接到一个中断引脚,用于触发中断服务程序。
中断服务程序是一段特殊的程序代码,它会在系统遇到中断信号时立即执行。
通过使用编码器芯片,可以实现对多个输入信号的优先级排序,并及时处理最高优先级的信号。
单片机优先编码器的应用非常广泛。
例如,在实时控制系统中,常常需要对多个传感器输入进行优先处理,以确保系统能够及时响应最重要的输入信号。
在多任务操作系统中,任务的调度通常也使用优先级编码器来确定下一个要执行的任务。
总结起来,单片机优先编码器是一种将多个输入信号编码为最高优先级信号的设备。
其原理基于优先级的概念,通过内部逻辑门的判断,选择最高优先级的输入信号作为输出。
它在实时控制系统和多任务操作系统中广泛应用,能够实现对多个输入信号的优先级排序,并及时处理最重要的信号。
单片机编码器编程实例 -回复
单片机编码器编程实例-回复“单片机编码器编程实例”编码器是一种常用的输入设备,广泛应用于各种电子设备中。
在单片机编程中,编码器常被用于控制和监测电机运动、旋转角度的测量以及用户界面交互等方面。
本文将以编码器编程为主题,一步一步介绍如何在单片机中实现编码器的功能。
第一步:了解编码器的基本原理和工作方式编码器是一种将旋转运动转化为电信号的设备。
常见的编码器有旋转编码器和线性编码器两种。
旋转编码器通常由一对光电传感器和一个带有刻度盘的旋转轴组成。
当旋转轴旋转时,光电传感器会感知到刻度盘的变化,并将其转化为电信号输出。
线性编码器则是通过传感器感知物体的移动,并将其转化为电信号输出。
第二步:了解编码器的输出类型和工作原理编码器的输出类型有两种,一种是增量式编码器,另一种是绝对式编码器。
增量式编码器通常输出两路信号,一路表示方向(A相信号),另一路表示旋转角度(B相信号)。
绝对式编码器则输出更多的信号,可以精确表示旋转位置或线性位移。
第三步:选择合适的编码器类型和接口在单片机编程中,通常会选择增量式编码器,因为其相对简单且较为常用。
选择适合的编码器接口是编程前必须考虑的因素之一。
常见的编码器接口有两种:脉冲计数接口和磁编码接口。
对于脉冲计数接口,编码器输出的脉冲信号通过单片机的IO口进行读取;对于磁编码接口,编码器输出的信号可以通过SPI、I2C等通信协议进行读取。
第四步:编写初始化函数在进行编码器编程之前,首先需要编写初始化函数,对编码器进行初始化设置。
初始化函数主要包括设置IO口的输入输出方向、使能编码器等操作。
第五步:编写中断服务函数编码器的工作是通过中断来实现的。
当编码器发生旋转或位移时,会产生相应的中断信号,通过中断服务函数来处理这些信号。
中断服务函数主要包括读取编码器的脉冲信号、计算旋转角度或位移,以及对应的控制逻辑。
第六步:编写主程序逻辑在编写主程序逻辑时,可以根据需要选择编码器的工作模式和功能。
stc单片机外部中断调用编码器

stc单片机外部中断调用编码器
STC单片机是一种常用的微控制器,具有丰富的外设接口和功能。
外部中断和编码器是STC单片机常见的应用之一。
当STC单片机上的某个外部事件(如按键按下、传感器触发等)发生时,会触发一个中断。
这个中断可以是外部中断,也可以是定时器中断等。
在中断服务程序中,可以调用编码器的相关函数或处理程序来读取编码器的值,从而获取编码器的状态或位置信息。
具体实现上,首先需要在STC单片机的外部中断配置中,配置相应的中断源和触发方式(上升沿、下降沿或双边沿触发)。
然后在中断服务程序中,编写相应的代码来调用编码器的读取函数,获取编码器的当前值。
需要注意的是,编码器的接口和读取方式可能因不同型号的STC单片机和编码器而有所不同。
因此,在实际应用中,需要查阅相关资料或参考STC单片机的技术手册和编码器的数据手册,以了解具体的接口和读取方式。
总结来说,"STC单片机外部中断调用编码器"是指当STC单片机上的某个外部事件发生时,触发中断,并在中断服务程序中调用编码器的相关函数或处理程序来读取编码器的值,以获取编码器的状态或位置信息。
这是STC单片机应用中常见的处理方式之一,有助于实现实时、快速地处理外部事件和获取编码器的数据。
stm32编码器工作原理
stm32编码器工作原理
编码器是一种用于测量和控制旋转运动的设备。
它通过将旋转运动转换为电信号来实现。
STM32编码器工作原理如下:
1. 工作原理:编码器通常由两部分组成:光电开关和编码盘。
光电开关发出的光束在编码盘上形成一系列突起和凹槽。
当编码盘旋转时,光电开关将检测到光束的变化,从而产生相应的电信号。
2. 脉冲信号:编码器输出的电信号通常是一个周期性变化的脉冲信号。
脉冲信号的频率与旋转速度成正比,因此可以用来测量和计算旋转角度和速度。
3. 编码方式:编码器的主要工作方式有两种:增量式编码器和绝对式编码器。
- 增量式编码器:通过计算脉冲的数量和方向来测量旋转角度。
计数器接收到脉冲信号后,可以根据脉冲的增加或减少来确定旋转方向。
但是,增量式编码器无法确定起始位置。
- 绝对式编码器:具有固定的起始位置,可以直接输出旋转
角度的绝对值。
它通常采用多位二进制编码,每个角度位置都有唯一对应的编码。
绝对式编码器可以通过特定的解码方法来获取角度信息。
4. STM32编码器接口:STM32微控制器通常具有编码器接口
模块,用于接收和处理编码器的脉冲信号。
可以通过编程配置引脚和计数器等相关参数,以便正确地读取和使用编码器数据。
5. 应用领域:编码器广泛应用于机器人、数控机床、摄像机云台、电动汽车等需要测量和控制旋转运动的领域。
请注意,以上内容仅为编码器工作原理的简要描述,具体实现和应用可能会有所差异。
stm32差分编码器编程实例

stm32差分编码器编程实例
当使用 STM32 微控制器编程时,可以通过外部差分编码器来实现位置或速度的测量。
下面是一个简单的 STM32 差分编码器编程实例,以帮助您了解如何进行编程:
1. 首先,确保您已经正确连接了差分编码器到 STM32 微控制器的外部引脚。
通常,差分编码器会有两个输出信号通道(通常称为 A 和 B 通道),以及一个用于指示方向的 Z 通道。
2. 在 STM32 的开发环境中,创建一个新的工程,并选择适当的 STM32 型号。
3. 在工程中,将差分编码器的 A 和 B 通道连接到 STM32 的两个外部中断引脚(例如 EXTI0 和 EXTI1)。
4. 在工程中,将差分编码器的 Z 通道连接到 STM32 的另一个外部中断引脚(例如 EXTI2)。
5. 在代码中,启用外部中断功能,并配置外部中断触发方式为上升沿或下降沿触发。
6. 在外部中断的中断处理函数中,编写代码来处理差分编码器的输出信号变化。
根据差分编码器的工作原理,每当 A 或 B 通道的信号变化时,都会触发外部中断。
您可以在中断处理函数中根据A 和 B 通道的状态变化来判断编码器的旋转方向,并相应地更新位置或速度的计数器。
7. 如果需要使用 Z 通道来确定编码器的起始位置,您可以在Z 通道的中断处理函数中重置位置或速度的计数器。
8. 在主程序中,您可以使用位置或速度的计数器值来执行相应的操作,例如控制电机或执行其他任务。
需要注意的是,具体的差分编码器编程实例可能会根据使用的STM32 型号和开发环境有所不同。
因此,您可以参考 STM32 的官方文档和相关的编程手册来获取更详细的信息和示例代码。
编码器单片机编程

#include<reg51.h>#define uchar unsigned char#define uint unsigned intuint mm=0;m=0;n=0;uchar kk;k=0;uchar code table[]={0xc0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x9 0,}; //共阳极七段码表delay(uint m) //延时函数{ uint i,j;for(i=m;i>0;i--)for(j=60;j>0;j--);}xian_shi() // 显示函数{ uchar qian,bei,shi,ge; //千,百,十,个uint jj;jj=mm;qian=jj/1000;bei=jj%1000/100;shi=jj%100/10;ge=jj%10;P2=0x10; //显示千位P0=table[qian]; delay(1);P2=0;P1=0x20; //显示百位P0=table[bei];delay(1);P2=0;P2=0x40; //显示十位P0=table[shi];delay(1);P2=0;P2=0x80; //显示个位P0=table[ge];delay(1);P2=0;}timer_init() //定时器计数器初始化函数{ EA=1; //开启总中断ET0=1; //开启定时器中断ET1=1; //开启计数器中断TMOD=0X51; //设置定时和计数器的工作方式TH0=(65535-50000)/256; //设置定时时间TL0=(65535-50000)%256;TH1=0; //计数器清零TL1=0;TR0=1; //启动定时器TR1=1; //启动计数器}main() //主函数{timer_init();P0=0xff; //开始数码管不显示while(1) //设置为按键按下开启数码管{if(P1==0xfe){m=1;n=0;}if(P1==0xff){n=1;}if(m==1&&n==1){k+=1;m=0;n=0;}if(k%2==1) //当按键按下数码管开始显示{if(mm>=3000) //判断转速是否大于3000转{P2=0x01; //大于3000转报警,数码管不显示delay(10);}else //小于3000转数码管显示xian_shi();}if(kk==20) //判断是否定时1s钟{mm=0;mm|=TH1; //将计数器值赋给mmmm=(mm<<8)|TL1;TH1=0;TL1=0;kk=0;}delay(1); //数码管刷新时间单位毫秒}}void timer0() interrupt 1 //中断服务函数{ TR0=0; //关闭定时器TR1=0; //关闭计数器TH0=(65535-50000)/256; //设置定时器初值TL0=(65535-50000)%256;kk++;TR0=1; //启动定时器TR1=1; //启动计数器}void timer1() interrupt 3 //显示0000说明出错{ TR0=0; //关闭定时器TR1=0; //关闭计数器mm=0;// TH1=0;// TL1=0;// TR1=1;}。
单片机如何接收编码器发送的信号
单片机如何接收编码器发送的信号旋转编码器是用来测量角度的装置,其分为单路输出和双路输出两种,通过这两种脉冲输出可以测量转速及判断旋转的方向。
因此编码器广泛应用于单片机上。
虽然编码器结构较为简单,但其工作原理还是比较复杂的,因此单片机上如何正确使用编码器就成为了广大工程员关注的问题,这个问题将以解决单片机如何接收编码器发送的信号为出发点。
单片机如何接收编码器发送的信号,这个问题要如何解决呢?首先需要设置编码器转动时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算编码器输出脉冲的个数了解到当时的转速。
此外,就是判断旋转方向了。
在这里可以通过PLC的计数器进行方向识别。
PLC中有高速计数器,可以设置成各种模式,其中包括AB正交脉冲,可以根据计数器的数字是增加后者减少来判断方向。
这就是编码器使用与单片机上的原理了。
1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
if(B_in) value++;
else value--; //value为编码器的值
P3IF=P3IF|0x04; //改上升沿触发
}
}
/************************************************************************/
* MCU: AT89S52 晶振:11.0592MHz *
* *
* 版本:V1.1 (2009/04/29) *
* *
* 3位数码管显示 *
* *
扫描编码器子函数
在编码器引脚A为低电平期间:
编码器引脚B从0到1为正转,编码器引脚B从1到0为反转。
**********************************************************/
void scan_encoder(void)
{
static bit Curr_encoder_b; //定义一个变量来储存当前B信号
对于方波信号,A,B两相相差90度相(1/4T),这样,在0度相位角,90度,180度,270度相位角,这四个位置有上升沿和下降沿,这样,实际上在1/4T方波周期就可以有角度变化的判断,这样1/4的T周期就是最小测量步距,通过电路对于这些上升沿与下降沿的判断,可以4倍于PPR读取角度的变化,这就是方波的四倍频。这种判断,也可以用逻辑来做,0代表低,1代表高,A/B两相在一个周期内变化是0 0,0 1,1 1,1 0 。这种判断不仅可以4倍频,还可以判断旋转方向。
}
if(updata)
{
updata = 0 ;
if( (Last_encoder_b == 0)&&(Curr_encoder_b== 1) ) //B从0到1为正转
{
if(counter == 255)
return;
/*******************************************************************
* *
* ME850单片机开发实验仪演示程序 - 旋转编码器计数程序 *
unsigned char counter = 0; //编码器脉冲计数
unsigned char n,shift;
/**********************************************************
ms延时子函数
**********************************************************/
*【声明】此程序仅用于学习与参考,引用请注明版权和作者信息! *
* *
********************************************************************
/************************************************************************/
void int1(void)interrupt 1
{
}
}
/***********************************************************************/
VCC接供电电源+
0V接供电电源-
A就是输出信号A相
B就是输出信号相
}
else //如果本次中断进来为下降沿触发
{
if(A_in)value--;
else value++; //value为编码器的值
P3IF=P3IF|0x08; //改上升沿触发
* *
* 功能简述: (飞梭旋钮功能) *
* 当旋钮顺时针旋转时,计数值增加。达到最大值255后,不再响应。 *
/************************************************************************/
void int0(void)interrupt 0
{
if(P3IF&0x04) //如果本次中断进来为上升沿触发
{
if(B_in) value--;
else value++; //value为编码器的值
P3IF=P3IF&0xfb; //改下降沿触发
}
else //如果本次中断进来为下降沿触发
* 当逆钮顺时针旋转时,计数值减小。达到最小值0后,不再响应。 *
* 当按下旋钮时,将计数值清零(归位)。 *
* *
unsigned char display[3];
unsigned char code LEDData[ ] =
{
0xC0,0xF9,0xA4,0xB0,0x99,0x92,
0x82,0xF8,0x80,0x90,0xff
};
char code reserve[3]_at_ 0x3b; //保留0x3b开始的3个字节
counter++; //正转计数加
}
else if( (Last_encoder_b == 1)&&(Curr_encoder_b == 0) ) //B从1到0为反转
{
if(counter == 0)
return;
* 邮箱:sofitech@ *
* *
*【版权】Copyright(C) 深圳硕飞科技有限公司 All Rights Reserved *
*******************************************************************/
#include <reg52.h>
sbit PINA = P1^0;
sbit PINB = P1^1;
sbit PIND = P1^2;
记住我
注册
chich的博客
chich的主页 | 查看全部博客主页碎碎念博客相册分享话题留言好友
查看博客|返回博客列表
旋转编码器程序
2010-09-26 22:31
最近用到旋转编码器,在网上找了一大堆资料,发现这篇好文章。收藏到自己的空间待用。
[ME850扩展应用]旋转编码器计数程序(飞梭旋钮功能)-数码管显示
* 作者:gguoqing (Email: gguoqing@) *
* 网站: (硕飞科技) *
* (伟纳单片机世界) *
屏蔽线接地
这是一个正交方波或正弦波输出的增量光学编码器。常见的是方波输出。
具体怎么接,需要看你后续的信号接收装置。
增量编码器的A/B输出的波形一般有两种,一种是有陡直上升沿和陡直下降沿的方波信号,一种是缓慢上升与下降,波形类似正弦曲线的Sin/Cos曲线波形信号输出,A与B相差1/4T周期90度相位,如果A是类正弦Sin曲线,那B就是类余弦Cos曲线。
那么,方波信号的最小分辨角度=360度/(4xPPR)。
举例说明:一个方波A/B输出360PPR的增量编码器,最小分辨角度=0.25度。
EEWORLD首页 | 论坛 | 博客 | 我的文章列表 空间首页 随便看看 帮助 欢迎您
登录 | 注册
登录站点
用户名 Biblioteka 密码 } Last_encoder_b = PINB; //记录B信号
while(!PINA) //等待A由低变高
{
Curr_encoder_b = PINB; //记录等待期间的B信号(指当前B信号)
updata = 1;
void delayms(unsigned int ms)
{
unsigned char k;
while (ms--)
{
for (k = 0; k < 114; k++)
;
}
}
/**********************************************************
static bit Last_encoder_b; //定义一个变量来储存上次B脚信号
static bit updata= 0;
if( PINA && PINB) //编码器无转动退出
{
updata = 0;
return;
if(P3IF&0x08) //如果本次中断进来为上升沿触发
{
if(A_in) value++;
else value--; //value为编码器的值
P3IF=P3IF&0xf7; //改下降沿触发