ev3编程软件中文使用帮助[工具]
EV3机器人入门计划

EV3机器人入门计划随着科技的不断发展,机器人已经成为了我们生活的一部分。
而EV3机器人,作为一款功能强大、易于操作的教育型机器人,正逐渐走进我们的视野。
本文将为大家提供一份完整的EV3机器人入门计划,帮助大家快速掌握这款机器人的操作与编程技巧。
一、了解EV3机器人1、EV3机器人简介EV3机器人是一款由乐高公司开发的、基于Linux操作系统的教育型机器人。
它配备了多种传感器和执行器,可以完成各种复杂的任务。
EV3机器人还支持多种编程语言,如Java、C++和Python等,方便用户进行编程。
2、EV3机器人硬件组成EV3机器人主要由以下几个部分组成:1、控制器:用于接收和执行用户的指令;2、传感器:包括触觉、红外、声音等传感器,用于感知环境信息;3、执行器:包括电机、LED等设备,用于完成任务;4、电池和充电器:提供电力支持。
二、EV3机器人操作入门1、搭建EV3机器人您需要按照说明书逐步搭建EV3机器人的各个部分。
在此过程中,您可以熟悉机器人的硬件组成和连接方式。
2、连接EV3机器人与计算机将EV3机器人的控制器通过USB连接线与计算机连接,以便上传程序到控制器。
3、安装EV3机器人编程软件根据您的操作系统,从乐高官网下载并安装相应的EV3机器人编程软件。
4、编写并上传程序使用编程软件编写您的第一个程序,并通过USB连接线将程序上传到EV3机器人的控制器。
在此过程中,您需要了解基本的编程语法和逻辑。
三、EV3机器人编程进阶1、学习基本编程语法通过阅读编程软件的帮助文档和学习教程,了解基本的编程语法和逻辑。
例如,条件语句、循环语句、函数等。
2、运用传感器和执行器利用EV3机器人的传感器和执行器完成各种任务。
例如,通过触觉传感器感知物体,然后使用电机移动机器人去抓取物体。
3、调试程序在程序编写完成后,您需要进行测试和调试。
通过观察机器人的行为和传感器的数据,不断调整程序的逻辑和参数,使机器人能够更好地完成任务。
EV3-软件..

EV3软件大厅
点击进入 编程界面
EV3编程软件界面
工具栏 编程区
内容 编辑器
编程面板
硬件页面
硬件页面
控制核心名称 电池电量 EV3红色表示 已连接程序块 下载 下载并运行 运行已选的 程序模块
程序块信息
端口查看 可用程序块
编程模块
动作类 控制类 传感器类 数据类 高级类 我的模块
动作类模块
+ 原始传感器值 + 未校准电机 + 反转电机 + 停止程序
我的模块
“我的模块”可用于创建子程序; 将一段程序,转换成一个“模 块”。
移动转向模块
移动转向模块可以使机器人向前、向后驱动、 转弯或停止。
显示模块
1 – 模式选择器 2 – 模块文本字段 3 – 输入 4 – “显示预览”按钮
显示模块可以在 EV3 程序块显示屏上显示文本或图形。
等待模块
1 – 模式选择器 2 – 输入
等待模块使程序在继续执行序列中的下一个模块之前等待某 种事件。可以等待特定时间量、传感器达到特定值或是传感 器值更改。
循环模块
1 – 模式选择器 2 – 输入 3 – “计数”输出 4 – 循环名称
循环模块是可以容纳编程模块序列的容器。它会使所含的模块 序列重复执行。可以选择不断重复执行模块、重复特定次数或 是直至传感器测试或其他条件为“真”。
切换模块
1 – “真”情况 2 – “伪”情况
切换模块是可以包含两个或更多编程模块序列的容器。每个序 列都称为一种“情况”。切换开头处的测试确定将运行的情况。 每当执行切换时,只会运行一种情况
( 从左到右)
+ 计时器 + 触动传感器 + 超声波传感器 + 能量表 + NXT 声音传感器
EV3-软件PPT参考幻灯片

+ 原始传感器值 + 未校准电机 + 反转电机 + 停止程序
12
我的模块
“我的模块”可用于创建子程序; 将一段程序,转换成一个“模 块”。
13
移动转向模块
移动转向模块可以使机器人向前、向后驱动、 转弯或停止。
14
显示模块
1 – 模式选择器 2 – 模块文本字段 3 – 输入 4 – “显示预览”按钮
EV3
编程软件入门
1
EV3机器人编程环境
使用LabVIEW引擎专为EV3机器人开发的图形化编程软件。功能 强大、简单易用。这个低起步,高发展的直观形象编程工具为机器人 编程学习提供了循序渐进的编程环境。
2
EV3编程软件特点
1. 图形化编程 2. 内置模块说明 3. 内置课程 4. 多语言环境(包括简体中文) 5. 向下兼容 6. 便捷的缩放功能 7. 新图标 8. 数学计算功能 9. 数据采集功能
循环模块是可以容纳编程模块序列的容器。它会使所含的模块 序列重复执行。可以选择不断重复执行模块、重复特定次数或 是直至传感器测试或其他条件为“真”。
17
切换模块
1 – “真”情况 2 – “伪”情况
切换模块是可以包含两个或更多编程模块序列的容器。每个序 列都称为一种“情况”。切换开头处的测试确定将运行的情况。 每当执行切换时,只会运行一种情况
3
EV3软件大厅
点击进入 编程界面
4
EV3编程软件界面
编程区
编程面板
工具栏
内容 编辑器
硬件页面
5
硬件页面
程序块信息 端口查看
可用程序块
ห้องสมุดไป่ตู้
控制核心名称
LEGO MINDSTORMS EV3软件桌面版入门教程:机器人学习计划说明书
πr INTRODUCTIONTO ROBOTICS LESSON PLAN5 . Lesson Challenge Ideas:a .Program the robot to trace out a figure eight, the first letter of your name, oranother letter or number .For this path, use curved turns for the first section, followed by single-motor turns for the 90-degree turns, and finally, a point turn before reversing the robot into the parking area .Discussion QuestionsRobot Behavior: What did you discover when using the different turn methods?• The Steering Parameter Value was set to 50 to perform a single motor turn,and the Steering Parameter Value was set to 100 or -100 to perform a pointturn.Program Flow: What is the purpose of the Wait Block?• The Wait Block makes your program wait for something before continuing to the next block in the sequence. You can wait for a certain amount of time for a sensor to reach a certain value, or for a sensor value to change.Discovery: Which method of turning worked the best for the curved line?• Move Tank or Move Steering Blocks work best because they keep both motors running in the same direction, with one motor running slightly slower. AssessmentDuring the lesson, students can interact with the Introduction to Robotics rubrics, using peer or self-assessment by marking the box that best reflects their level of work .Help your students to improve by writing a comment for each of them in the Notes column during the lesson cycle .Discussion QuestionsRobot Behavior: How did you overcome the problem of movinglarger sized objects?• Modified the Medium Motor Module frame to fit the larger objects.Program Flow: What did you have to change in order to movedifferent sized objects?• The number of degrees of the Medium Motor Block had to be changed.Discovery: What did you discover when using the Medium Motor Module?• In order for the robot to lower the Medium Motor Module, the Medium Motor Block Power setting must be set to a negative (-) value.AssessmentDuring the lesson, students can interact with the Introduction to Robotics rubrics, using peer or self-assessment by marking the box that best reflects their level of work .Help your students to improve by writing a comment for each of them in the Notes column during the lesson cycle .Discussion QuestionsRobot Behavior: What happens if the speed of the Medium Motor Moduleis set too high?• The Medium Motor Module knocks over or pushes aside the Cuboid before itcan take hold of it.Program Flow: What is the difference between the Change and CompareModes when using the Ultrasonic Sensor?• Change Mode reads the distance and then waits for an increase or decrease.Compare Mode waits for a certain predefined distance.Discovery: What happens to the robot when it drives towards a round object?• The Ultrasonic Sensor does not always recognize the shape, as it is unable to receive a signal back.AssessmentDuring the lesson, students can interact with the Introduction to Robotics rubrics, using peer or self-assessment and can record their progress by marking the box that best reflects their level of work .Help your students to improve by writing a comment for each of them in the Notes column during the lesson cycle .In the “Modify It” task, you may want to introduce students to the Loop Block as a way of decreasing the number of blocks needed to drive in a square . However, allow the students sufficient time to work it out for themselves .Suggested program:Discussion QuestionsRobot Behavior: What did you have to do in order to make your robot turn90 degrees?• Slow down the rotation speed of the robot and potentially set the angle to avalue lower than 90 degrees.Program Flow: Why is it important to know how to set the Threshold Value?• This can make the difference between whether or not the robot reacts to theinput of the sensor. It is also a way in which the robot can be ‘fine-tuned’ tomake it more accurate.Discovery: What did you find was the difference between the Change andCompare Modes?• Change Mode - Wait for the selected value to change.• Compare Mode - Wait to reach a selected value.AssessmentDuring the lesson, students can interact with the Introduction to Robotics rubrics, using peer or self-assessment and can record their progress by marking the box that best reflects their level of work .Help your students to improve by writing a comment for each of them in the Notes column during the lesson cycle .Discussion QuestionsRobot Behavior: Which color or shade reflects the most light?• White reflects the most and black reflects the least.Program Flow: Was it easier to set up the Wait Block for measuring Color orReflected Light Intensity?• When detecting a color, the color is just selected. When reacting to reflectedlight, a good threshold value must be found in order for the robot to behave as expected. Color is easier if the Color Sensor recognizes the color.Discovery: What would you do if the robot were to detect a gray color?• Use the Wait Block set to read the Color Sensor inReflected Light Intensity Mode.AssessmentDuring the lesson, students can interact with the Introduction to Robotics rubrics, using peer or self-assessment and can record their progress by marking the box that best reflects their level of work .Help your students to improve by writing a comment for each of them in the Notes column during the lesson cycle .Lesson 7 4 . Students complete the “Modify It” task, which allows them to test their programwith a lighter-colored line . This will challenge them to experiment with the WaitBlock’s Threshold Value parameter .5 . Lesson Challenge Ideas:a . Ask the students to test how fast they can make their robot follow a line .b . Make a line-follower program that uses Move Steering Blocks to performcurved turns rather than the sharp single-motor turns used in the tutorial .c .The tutorial sample program uses a Switch Block to create a line follower .Can they produce the same result without using a Switch Block?Discussion QuestionsRobot Behavior: What did you have to do in order to make the robot follow theline more smoothly?• Keep both motors running, one at a lower speed than the other, or use theMove Steering Blocks.Program Flow: What is a threshold value?• The threshold value is the average number reading between light and dark.This is the number that you add to the Switch Block.Discovery: What did you have to do in order for the robot to follow a gray line?• Work out the average threshold value between white and gray.AssessmentDuring the lesson, students can interact with the Introduction to Robotics rubrics,using peer or self-assessment and can record their progress by marking the box thatbest reflects their level of work .Help your students to improve by writing a commentfor each of them in the Notes column during the lesson cycle .AssessmentObserve and/or ask questions to determine if the students:• Use both the Color and Gyro Sensors• Correctly predict the angle required to park the robot in each of the parking bays • Use the blue line to stop forward movement• Can compensate for the factors that may affect the stopping precision when using the Gyro Sensor (sensor tolerance, motor slack, and rotational momentum)• Work cooperatively to solve the tasksAssessmentObserve and/or ask questions to determine if the students can use their experience from the seven lessons to solve this seven-step Challenge by:• Understanding the difference between Change and Compare Modes; they should use the Wait Block’s Ultrasonic Sensor in Compare Mode to achieve the best results in this Challenge• Calculating distance based on wheel circumference or using trial and error to get to the required 84 cm• Estimating the turn angle by using a protractor and the Gyro Sensor• Measuring the distance and then calculating the number of motor rotations to get close to the center of the target• Programming the robot to stop at the line• Following the line back• Stopping in front of the large object• Working cooperatively to solve the tasksDuring the lesson, students can interact with the Introduction to Robotics rubrics, using peer or self-assessment and can record their progress by marking the box that best reflects their level of work .Help your students to improve by writing a comment for each of them in the Notes column during the lesson cycle .Relevant Standards Computer Science Teachers AssociationComputational Thinking• Recognize that software is created to control computer operations .• Understand and use the basic steps in algorithmic problem solving .• Develop a simple understanding of an algorithm .Collaboration• Work cooperatively and collaboratively with peers, teachers, and others usingtechnology .• Identify ways that teamwork and collaboration can support problem solving andinnovation .Computing Practices and Programming• Use technology resources for problem solving and self-directed learning .• Construct a program as a set of step-by-step instructions to be acted out .• Implement problem solutions using a block-based visual programming language .Computers and Computing Devices• Use standard input and output devices to successfully operate computers andrelated technologies .• Apply strategies for identifying simple hardware and software problems that mayoccur during use .• Identify factors that distinguish humans from machines .• Recognize that computers model intelligent behavior (as found in robotics, speechand language recognition, and computer animation) .Relevant Standards ISTE National Education Technology StandardsCreativity and Innovation• Students demonstrate creative thinking, construct knowledge, and developinnovative products and processes using technology .• Apply existing knowledge to generate new ideas, products, or processes .• Use models and simulations to explore complex systems and issues .Communication and Collaboration• Students use digital media and environments to communicate and workcollaboratively, including at a distance, to support individual learning and contributeto the learning of others .• Contribute to project teams to produce original works or solve problems .Critical Thinking, Problem Solving, and Decision Making• Students use critical thinking skills to plan and conduct research, manage projects,solve problems, and make informed decisions using appropriate digital tools andresources .• Plan and manage activities to develop a solution or complete a project .• Collect and analyze data to identify solutions and/or make informed decisions .• Use multiple processes and diverse perspectives to explore alternative solutions .Digital Citizenship• Exhibit a positive attitude toward using technology that supports collaboration,learning, and productivity .• Demonstrate personal responsibility for lifelong learning .Technology Operations and Concepts• Students demonstrate a sound understanding of technology concepts, systems,and operations .• Understand and use technology systems .• Select and use applications effectively and productively .• Troubleshoot systems and applications .• Transfer current knowledge to learning of new technologies .ITEEA Standards for Technological LiteracyThe Nature of Technology• Students will develop an understanding of the characteristics and scope oftechnology .• Students will develop an understanding of the core concepts of technology .Design• Students will develop an understanding of the attributes of design .• Students will develop an understanding of engineering design .• Students will develop an understanding of the role of troubleshooting, research anddevelopment, invention and innovation, and experimentation in problem solving .Abilities for a Technological World• Students will develop abilities to apply the design process .• Students will develop abilities to use and maintain technological products andsystems .Relevant Standards Common Core Mathematics StandardsPractices• Make sense of problems and persevere in solving them .• Reason abstractly and quantitatively .• Construct viable arguments and critique the reasoning of others .• Attend to precision .• Look for and make use of structure .• Look for and express regularity in repeated reasoning .• Model with mathematics .• Use appropriate tools strategically .Expressions and Equations• Solve real-life and mathematical problems using numerical and algebraicexpressions and equations .Geometry• Solve real-life and mathematical problems involving angle measure, area, surfacearea, and volume .Common Core English Language ArtsReading Standards for Literacy in Science and Technical Subjects• Follow precisely a multistep procedure when carrying out experiments, takingmeasurements, or performing technical tasks .• Determine the meaning of symbols, key terms, and other domain-specific wordsand phrases as they are used in a specific scientific or technical context relevant togrades 6–8 texts and topics .Reading Standards for Informational Text• Draw on information from multiple print or digital sources, demonstrating the abilityto locate an answer to a question quickly or to solve a problem efficiently .Speaking and Listening Standards• Engage effectively in a range of collaborative discussions (one-on-one, in groups,and teacher-led) with diverse partners on topics, texts, and issues, building onothers’ ideas and expressing their own clearly .Introduction to Robotics Class Assessment Record Name。
乐高机器人编程

乐高机器人编程简介乐高机器人编程是一种基于乐高积木系统的编程教育方式。
通过搭建乐高积木机器人并使用编程语言进行编程,学生可以学习编码、问题解决、逻辑思维和团队合作等重要技能。
乐高机器人编程教育旨在培养学生的创造力、创新思维和科学精神,帮助他们在现实世界中应对日益复杂的问题和挑战。
乐高机器人编程套件乐高机器人编程套件是用于乐高机器人编程的教学工具。
它包括乐高积木、传感器、电机和编程软件等组件,能够帮助学生构建各种不同类型的机器人,并且通过编程给机器人赋予不同的功能。
乐高机器人编程套件提供了不同级别的套件,适用于不同年龄段的学生。
其中包括入门级套件,适合初学者,提供了基础的编程和机器人构建知识;进阶级套件,适合有一定经验的学生,提供了更多的编程和机器人构建挑战;高级级套件,适合有较高水平的学生,提供了更复杂的编程和机器人构建项目。
乐高机器人编程软件是用于编写和上传程序到乐高机器人的工具。
乐高提供了不同的编程软件,适用于不同级别的学生。
乐高EV3编程软件乐高EV3编程软件是一个基于图形化编程界面的软件,适用于初学者和年轻学生。
使用该软件,学生可以使用简单的拖放和连接模块的方式编写程序。
该软件还提供了一系列预定义的编程模块,学生只需要将它们拖放到工作区中,然后连接它们,即可创建功能强大的程序,控制乐高机器人实现各种动作。
乐高Mindstorms编程软件乐高Mindstorms编程软件是一个更高级的编程工具,适用于有一定经验的学生。
该软件提供了更多的编程功能和选项,如条件语句、循环和传感器反馈等。
学生可以使用该软件编写更复杂的程序,并通过传感器获取机器人周围环境的信息,并根据这些信息做出相应的动作。
乐高Spike编程软件是一个基于文本编程的工具,适用于有较高水平的学生。
使用该软件,学生可以编写更复杂和灵活的程序,并使用高级编程概念,如函数、变量和对象等。
乐高Spike编程软件提供了更大的灵活性和自由度,让学生可以更深入地探索和实验不同的编程概念。
乐高ev3机器人初级教程(图文版)
乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程。
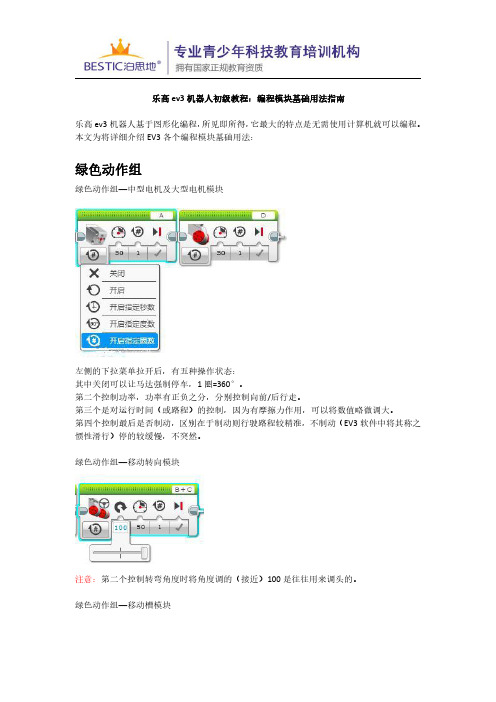
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°。
第二个控制功率,功率有正负之分,分别控制向前/后行走。
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大。
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然。
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的。
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块。
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕。
大写的X和Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上。
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的。
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁。
橙色流程控制组橙色流程控制组—开始模块在将EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序。
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意。
注意:31313配的那个测距离的传感器叫红外传感器别搞错了。
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序。
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行。
时间和计数退出就是到了就自动退出。
逻辑退出:假如事先设定逻辑判定为真时退出,连线接入判定口(最右侧的那个)后如果输出真,则退出;反之亦然。
乐高ev3机器人初级教程(图文版)
乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程。
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°。
第二个控制功率,功率有正负之分,分别控制向前/后行走。
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大。
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然。
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的。
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块。
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕。
大写的X和Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上。
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的。
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁。
橙色流程控制组橙色流程控制组—开始模块在将EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序。
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意。
注意:31313配的那个测距离的传感器叫红外传感器别搞错了。
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序。
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行。
时间和计数退出就是到了就自动退出。
逻辑退出:假如事先设定逻辑判定为真时退出,连线接入判定口(最右侧的那个)后如果输出真,则退出;反之亦然。
ev3编程软件中文使用帮助[常规]
![ev3编程软件中文使用帮助[常规]](https://img.taocdn.com/s3/m/62f8f12386c24028915f804d2b160b4e767f81c7.png)
ev3编程软件中⽂使⽤帮助[常规]欢迎使⽤ LEGO? MINDSTORMS? EV3 帮助1⽬录⼊门 ........................................................................................................................................................................... 2 程序........................................................................................................................................................................... 5 项⽬属性................................................................................................................................................................... 8 连接到EV3........................................................................................................................................................... 10 硬件页⾯................................................................................................................................................................. 13 端⼝选择................................................................................................................................................................. 17 数据线..................................................................................................................................................................... 21 数据类型................................................................................................................................................................. 25 内容编辑器............................................................................................................................................................. 27 教师模式................................................................................................................................................................. 32 管理⽂件................................................................................................................................................................. 34 EV3 键盘快捷⽅式............................................................................................................................................... 36 使⽤红外传感器..................................................................................................................................................... 41 使⽤红外传感器“信标”模式................................................................................................................................ 42 使⽤红外传感器“近程”模式................................................................................................................................ 45 使⽤红外传感器“远程”模式................................................................................................................................ 47 使⽤超声波传感器................................................................................................................................................. 51 使⽤颜⾊传感器..................................................................................................................................................... 54 使⽤计时器............................................................................................................................................................. 61 使⽤触动传感器..................................................................................................................................................... 63 使⽤程序块按钮..................................................................................................................................................... 68 使⽤电机转动传感器............................................................................................................................................. 71 使⽤陀螺仪传感器................................................................................................................................................. 75 使⽤ NXT 声⾳传感器........................................................................................................................................ 77 使⽤温度传感器..................................................................................................................................................... 79 使⽤能量计 . (82)2⼊门EV3 软件在“⼤厅”中打开。
《工业机器人认知》课程标准

《工业机器人认知》课程标准一、课程基本信息课程名称:《工业机器人认知》课程学时:112开课时段:第一学年(第1学期)适用专业:适用六年制预备技师工业机器人应用与维护专业授课对象:工业机器人应用与维护专业学生二、制订课程标准的依据本标准依据工业机器人应用与维护专业人才培门养方案中的人才培养规格要求和对《工业机器人认知》课程教学目标要求,对接工业机器人应用与维护专业的职业岗位群职业能力和相关技能标准而制订。
用于指导《工业机器人认知》课程建设与课程教学。
三、课程性质与任务《工业机器人认知》是工业机器人应用与维护专业的专业基础(或者专业核心、专业方向)课程,是工业机器人装调维护等人员必备的知识。
通过本课程的学习,使学生了解工业机器人的基本慨况,熟悉工业机器人的机械结构、传感器应用、控制系统原理,了解如何进行示教编程和设备的管理与维护,培养学生在工业机器人技术方面分析与解决问题的能力,提升学生机器人学习兴趣,为后续课程学习奠定基础。
四、本课程与其它课程的关系五、课程目标与要求通过本课程的学习和训练,使学生具备以下知识-能力-素质:(一)知识目标1.了解工业机器人的历史与发展、分类与应用,理解工业机器人坐标及坐标系2.了解工业机器人本体基本结构,包括机身及臂部结构、腕部及手部结构、传动及行走机构等3.理解工业机器人运动学、动力学的基本概念,了解工业机器人的位姿分析和运动分析方法,了解工业机器人轨迹规划的基本概念和特点4.了解工业机器人的视觉、触觉、位置及位移等环境感觉技术原理5.了解工业机器人控制系统的主要功能,理解其控制方式,了解相关工业机器人编程语言6.了解工业机器人工作站及生产线的基本组成和特点7.了解工业机器人的自动线管理、维护保养技术8.了解EV3机器人系统组成,掌握EV3机器模块的用法9.掌握EV3核心机器人模块的用法,学会独立设计EV3机器人10.通过EV3机器人,掌握最基本的编程知识,学会程序流程图的绘制方法。
EV3中文用户指南
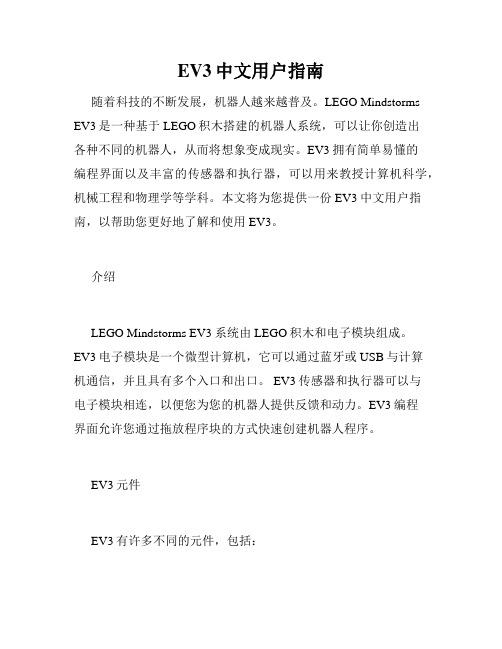
EV3中文用户指南随着科技的不断发展,机器人越来越普及。
LEGO Mindstorms EV3是一种基于LEGO积木搭建的机器人系统,可以让你创造出各种不同的机器人,从而将想象变成现实。
EV3拥有简单易懂的编程界面以及丰富的传感器和执行器,可以用来教授计算机科学,机械工程和物理学等学科。
本文将为您提供一份EV3中文用户指南,以帮助您更好地了解和使用EV3。
介绍LEGO Mindstorms EV3系统由LEGO积木和电子模块组成。
EV3电子模块是一个微型计算机,它可以通过蓝牙或USB与计算机通信,并且具有多个入口和出口。
EV3传感器和执行器可以与电子模块相连,以便您为您的机器人提供反馈和动力。
EV3编程界面允许您通过拖放程序块的方式快速创建机器人程序。
EV3元件EV3有许多不同的元件,包括:1. EV3电子模块:它是EV3系统的核心,可以控制传感器和执行器等。
2. EV3传感器:传感器可以测量机器人周围的各种条件。
EV3传感器包括彩色,触摸,超声波,陀螺仪,重力,磁力和红外传感器等。
3. EV3执行器:执行器可以实现特定的机械动作。
EV3执行器包括电机,舵机和活塞等。
4. EV3积木:EV3系统的构建部分是LEGO积木。
编程为了编写EV3程序,您需要使用LEGO官方提供的EV3编程软件。
该软件可以在Windows,Mac OS X和Linux操作系统上运行,并且需要您将EV3电子模块与计算机连接。
此外,您还需要一个连接EV3电子模块的USB电缆或蓝牙适配器。
编程EV3机器人程序可以通过将不同颜色的程序块拖放到编程窗口中来完成。
其中红色程序块用于控制EV3电子模块,绿色程序块用于控制EV3传感器和执行器。
EV3程序中最常用的命令是'运行'和'停止'。
通过将'运行'命令放在程序的开始处并将'停止'命令放在程序的末尾,您可以控制机器人何时开始和结束执行任务。
ev3编程模块

欢迎使用 LEGO® MINDSTORMS® EV3 帮助1目录中型电机模块 ........................................................................................................................................................... 2 大型电机模块 ........................................................................................................................................................... 6 移动转向模块 ......................................................................................................................................................... 10 移动槽模块 ............................................................................................................................................................. 16 显示模块 ................................................................................................................................................................. 22 声音模块 ................................................................................................................................................................. 30 程序块状态灯模块 ................................................................................................................................................. 34 开始模块 ................................................................................................................................................................. 36 等待模块 ................................................................................................................................................................. 38 循环模块 ................................................................................................................................................................. 46 切换模块 ................................................................................................................................................................. 54 循环中断模块 ......................................................................................................................................................... 65 超声波传感器模块 ................................................................................................................................................. 66 红外传感器模块 ..................................................................................................................................................... 70 陀螺仪传感器模块 ................................................................................................................................................. 73 颜色传感器模块 ..................................................................................................................................................... 76 电机旋转模块 ......................................................................................................................................................... 80 触动传感器模块 ..................................................................................................................................................... 83 温度传感器模块 ..................................................................................................................................................... 85 计时器模块 ............................................................................................................................................................. 87 程序块按钮模块 ..................................................................................................................................................... 89 能量计模块 ............................................................................................................................................................. 91 NXT 声音传感器模块 ........................................................................................................................................... 93 常量模块 ................................................................................................................................................................. 95 变量模块 ................................................................................................................................................................. 96 阵列运算模块 ....................................................................................................................................................... 100 逻辑运算模块 ....................................................................................................................................................... 103 数学模块 ............................................................................................................................................................... 105 舍入模块 ............................................................................................................................................................... 108 比较模块 ............................................................................................................................................................... 111 范围模块 ............................................................................................................................................................... 113 文本模块 ............................................................................................................................................................... 115 随机模块 ............................................................................................................................................................... 117 文件读写模块 ....................................................................................................................................................... 120 数据日志模块 ....................................................................................................................................................... 123 消息传递模块 ....................................................................................................................................................... 126 蓝牙连接模块 ....................................................................................................................................................... 130 保持活动模块 ....................................................................................................................................................... 132 原始传感器值模块 ............................................................................................................................................... 134 停止模块 ............................................................................................................................................................... 136 反转电机模块 ....................................................................................................................................................... 137 未调整电机模块 (138)2将电机开启指定时间量或圈数。
ev3编程软件中文使用帮助[工具]
![ev3编程软件中文使用帮助[工具]](https://img.taocdn.com/s3/m/c3bcba6927d3240c8447efd3.png)
声音编辑器
通过声音编辑器可以记录和编辑自己的声音文件。编辑的声音文件可以保存在计算机上,然后在声音模块中使用,就如同任 何现有 EV3 声音文件一样。还可以编辑现有声音文件。
在“工具”菜单中选择“声音编辑器”可打开声音编辑器。打开现有声音文件或记录自己的声音,使用滑块裁剪声音文件,然后 保存文件。
版本,来拥有最新技术并提高 EV3 程序块的性能和可靠性。
升级 EV3 固件
16
要升级固件,需要从计算机到 EV3 程序块的 USB 连接。计算机还必须连接到 Internet。
1. 开启 EV3 程序块并将其连接到计算机。只能使用 USB 连接进行固件升级。
2. 在“工具”菜单中选择“固件升级”。“固件升级”对话框会打开,如此处所示。
可以将新“我的模块”拖动到编程画布上以在程序中使用它。
如果要编辑“我的模块”的任何部分,请双击它。
使用“我的模块”实现更多目的
刚才为形成方形而创建的“我的模块”非常棒,但是如果需要更大的方形该怎么办呢?或是如果希望机器人更快地按方形驱动 呢?如果需要三角形该怎么办呢?
12
可以进入“我的模块”,每次更改输入,不过有一种更好的方式。 设置迷你程序,如同对第一个“我的模块”所执行的操作一样:选择所需模块,然后在“工具”菜单中选择“我的模块创建器”以 启动“我的模块创建器”。 填写所有部分,如同对第一个“我的模块”所执行的操作一样,只是不要马上单击“完成”。而是单击“我的模块”上的“+”符号 以添加参数。
3. 单击“检查”(“在线升级”旁)可查看是否有新固件升级可用。如果可用,则将它们下 载到计算机。
4. 从“可用固件文件”中选择最新固件版本。如果未列出所需固件版本,请按压“浏览”以 查找它。
ev3编程软件中文使用帮助[数据日志]
![ev3编程软件中文使用帮助[数据日志]](https://img.taocdn.com/s3/m/afe30b3a10661ed9ad51f3df.png)
“从数据设置中删除值”用于删除所选预测或数据设置中特定范围的值。“删除值”还将删除“图形”上无用的波峰和波谷,该“图 形”在收集某些传感器的数据时显示。
要从特定的预测或数据设置中删除值,请通过在“图形”上或“数据设置框”中单击它,选择预测或数据设置。然后从“工具”菜 单的“数据设置”选项中选择“删除值”。
欢迎使用 LEGO® MINDST验设置
“实验配置”选项卡用于设置实验。这包括实验运行的时间长度、从传感器记录数据的频率以及用于收集数据的传感器。 可以通过单击“实验配置”选项卡来打开“实验配置”。
1
实验配置
在“持续时间”中选择希望实验收集数据的时间长度。选择“秒数”或“分钟”。 在“速率”中选择希望记录数据的频率。选择“每秒采样”或“采样时间间隔”。
记录预测内容
要创建“记录预测内容”,请在屏幕上拖动铅笔光标以进行绘制。或者,可进行一系列左键单击:预测会贴靠到这些单击。
11
函数预测
要创建函数预测,请从菜单中选择合适函数类型并输入相关参数。
编辑现有预测
从“预测工具”菜单中选择“编辑预测”,然后单击预测以进行编辑。 可以通过拖动预测来编辑记录预测。单击图形可使预测贴靠到光标。 可以通过在函数预测面板中更改参数值来编辑函数预测。
数据日志工具栏
5
选择工具:
平移工具: 进行有关来自实验的数据应如何显示的预测。
预测工具: 分析数据的特定部分。
分析工具:
注释工具:
截屏:
拍摄“图形区域”的照片。
保存项目
撤销、重做:
缩放:
放大、缩小、重置缩放
注释工具
使用注释工具可在“图形区域”中输入注释。可以为注释提供标题。可以将注释框拖动到所需位置,并进行最小化或最大化。
EV3魔方程序方法.doc
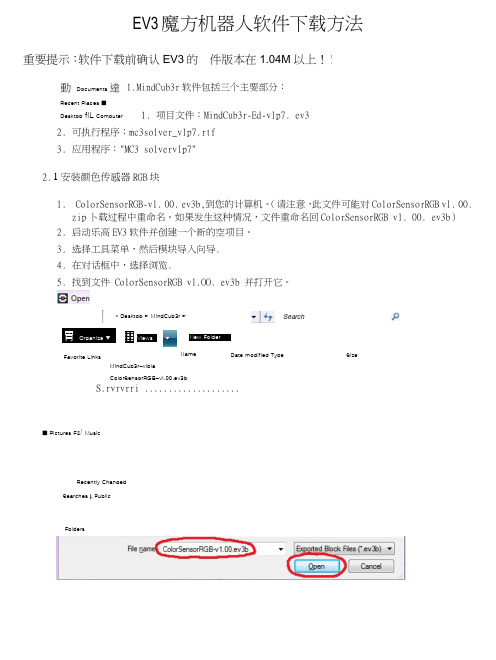
EV3魔方机器人软件下载方法1.M indCub3r 软件包括三个主要部分: 1. 项目文件:MindCub3r-Ed-vlp7. ev32. 可执行程序:mc3solver_vlp7.rtf3. 应用程序:"MC3 solvervlp7" 2. 1安装颜色传感器RGB 块1. ColorSensorRGB-vl. 00. ev3b,到您的计算机。
(请注意,此文件可能对ColorSensorRGB vl. 00.zip 卜载过程中重命名。
如果发生这种情况,文件重命名回ColorSensorRGB vl. 00. ev3b ) 2. 启动乐高EV3软件并创建一个新的空项目。
3. 选择工具菜单,然后模块导入向导. 4. 在对话框中,选择浏览.5. 找到文件 ColorSensorRGB vl.OO. ev3b 并打开它。
MindCub3r-vlplaColorSensorRGB-vl.00.ev3bS.rvrvrri ....................■ Pictures F&1 Music件版本在1.04M 以上!!動 Documents 達 Recent Places ■ Desktop flL Computer« Desktop ► MindCub3r ►胃 Organize ▼□□□□□□□□□ViewsNew FolderFavorite LinksNameDate modified TypeSizeRecently Changed Searches j. PublicFoldersSearch重要提示:软件下载前确认EV3的6.选择 ColorSensorRGB vl. 00. cv3b,然后选择导入.Block Import and Export7.若要完成安装,请关闭该对话框,并退出乐高EV3软件2.2下载MindCub3r程序1.启动乐高EV3软件,请选择文件菜单然后打开项目.2.找到MindCub3r Ed vlp7. ev3文件并打幵它。
EV3机器人举重机器人编程
指导学员根据各自的逻辑思路图,编写控制程序!
二、游戏及比赛(30分钟):
设置重物存放区和重物放置平台,规定时间内举起并平稳放置更多重物的机器人获胜,并获得“迪瓦大力士称号”!
三、总结(10分钟)
1、本节课的瓦力都用到了哪些机械结构?
2、对每个学员的课堂表现进行评价(主要为逻辑思路的分析,程序调试的合理性等方面)!
3、清洁机器人、餐厅服务机器人、无人机等已经成为了生活当中常见的事物,本期课程我们将制作更多的城市生活机器人,一起开创充满科技与智能的时代。
本期课程通过城市生活主题课程将带领孩子们认识应用型机器人,引导孩子们接触社会生活的一些基础技能,通过孩子们丰富的想象力,为社会生活设计几款能够实际运用的服务机器人。
3-5.12 举重机器人
教学名称
举重机器人编程
教学目标
1、蓝牙控制练习;
2、机械结构的应用;
3、传感器的应用;
4、动手能力锻炼及逻辑思路分析锻炼。
教学用具
EV3控制器2个、大型电机2个、中型电机1个、触碰传感器1个、超声波传感器、齿轮及零件若干。
(助教要配合主教课前需要准备的上课需要东西)
教学过程
一、程序编写及调试(50分钟):
控制要求:
1、遥控器控制机器人前后左右的移动;
2、控制机器人将制定地点的中午举起;
3、控制机器人到达指定的重物放置区(注意放置区为一个适当高度的平台,平台高度需要机器人的超声波传感器能够检测到,手臂能够够到);
4、当机器人检测到平台时停止,并自动将货物平稳的放到平台上。
逻辑思路(15分钟):
根据任务要求,指导学员绘制逻辑思路流程图。
本期课程将以模仿、改装为主要教学内容,在巩固机器人制作及编程的基础知识前提下,一定程度的引入创新及创造内容,为接下来的自主设计课做好准备。
ev3列表用法
ev3列表用法EV3列表的用法1. 创建一个EV3列表要创建一个EV3列表,可以使用以下代码:import as ev3# 创建一个空的EV3列表my_list = ()# 添加元素到列表中my_("apple")my_("banana")my_("orange")# 打印列表print(my_list)2. 访问列表中的元素要访问EV3列表中的元素,可以使用索引。
索引从0开始计数。
import as ev3my_list = ()my_("apple")my_("banana")my_("orange")# 访问第一个元素first_element = my_list[0]print(first_element)# 访问最后一个元素last_element = my_list[-1]print(last_element)3. 修改列表中的元素要修改EV3列表中的元素,可以使用索引。
import as ev3my_list = ()my_("apple")my_("banana")my_("orange")# 修改第一个元素my_list[0] = "kiwi"# 打印修改后的列表print(my_list)4. 列表的长度要获取EV3列表的长度,可以使用len()函数。
import as ev3my_list = ()my_("apple")my_("banana")my_("orange")# 获取列表的长度length = len(my_list)print(length)5. 列表的遍历要遍历EV3列表中的元素,可以使用循环结构,如for循环。
Legoev3机器人怎么编程
Lego ev3机器人怎么编程乐高EV3最大特点是无需使用计算机就可进行编程:EV3配备了一块“智能砖头”,用户可以使用它来对自己的机器人编辑各种指令。
而在过去,使用者只能通过计算机来进行该操作。
编程完成后,使用者还需要通过一根数据线将程序下载到机器人身上。
但是现在,EV3完全不需要计算机。
(其实这个功能不好用,NXT已经有了)技术规格:处理器:ARM 9处理器300MHz 基于Linux操作系统。
固件:V1.06H (家庭版)/V1.06H (教育版)输入端口:4个输入端口,1000/s的采样率。
输出端口:4个存储:内置16MB的ROM 和64MB的RAM。
支持最高32GB Micro SD 卡拓展按键:可发出三种颜色的六个按钮。
并且通过颜色表明活动状态。
屏幕:分辨率178*128像素,能更好的查看详细图形和传感器数据。
拓展:通过EV3左侧的标准USB (EV3有两个USB —个mini USB是用于程序下载,一个标准USB用于拓展)可连接外部Wi-Fi、蓝牙适配器等外置设备。
通讯:可使用USB2.0、Wi-Fi通讯电池:可使用六节AA电池,或者原装2050毫安时的锂电池。
伺服电机:和以前的NXT伺服电机没什么太大区别。
主要区别在于外观,更容易连接。
技术规格:测速反馈精度:160 - 170 RPM运行扭矩约30 oz *in失速转矩约60oz*in微型伺服电机:比正常的伺服电机扭力小,速度高,更快反应时间和更小的体积。
技术规格:测速反馈精度:240 - 250 RPM运行扭矩约11 oz*in失速转矩约17 oz*in超声波传感器:比之前的超声波传感器的精度提高技术规格:测量距离:3到250厘米测量精度:1厘米陀螺仪传感器:这是一个新增加的传感器,用于测量旋转运动方向和改变运动方向,可测量角度,制作自平衡机器人。
不过这个貌似只能测量一个方向的。
技术规格:角度精准度:出°最大测量角度:440°/s采样率:1KHz颜色传感器:它可以测量光的反射值(就像NXT光电传感器那样)也可以检测颜色。
乐高EV3双颜色传感器巡线编程步骤

2016
2021/10/10
1
第一步
2021/10/10
Ø 点击文件 Ø 新建项目 Ø 选择“程序”
2
第二步
Ø 拖拽一个颜色传感器模块 Ø 选择的测量→反射光线强度 Ø 重新拖拽一个颜色传感器模块拖拽后方,重复上述
动作(如图,共需要拖拽两个颜色传感器模块)
PS:注意选择颜色传感器所对应的端口
2021/10/10
3
第三步
Ø 放入数学模块,选择高级
2021/10/10
4
第四步
Ø 点击数学模块右上角区域,输入公式(a-b)*c Ø 数学模块c写入数值1.8 Ø 把两个颜色传感器模块分别连入数学模块中的a
和b
2021/10/10
5
第五步
Ø 加入移动转向模块,选择开启 Ø 数学模块中的=连入移动转向模块中的转向 Ø 注意移动转向模块中点击所对应位置 Ø 功率可大可小,根据实际测试填入相应功率,68只
是参考值
2021/10/10
6
第六步
Ø 把所编程序加入循环模块中
2021/10/10Fra bibliotek完7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
比较合适。
欢迎使用 LEGO® MINDSTORMS® EV3 帮助
0
目录
图像编辑器 ............................................................................................................................................................... 2 声音编辑器 ............................................................................................................................................................... 6 内存浏览器 ............................................................................................................................................................... 8 我的模块创建器 ..................................................................................................................................................... 10 无线设置 ................................................................................................................................................................. 15 软件升级 ................................................................................................................................................................. 15 固件升级 ................................................................................................................................................................. 16
打开图像和调整其大小
打开图片以开始编辑。 使用缩放按钮调整图像的大小。可以通过单击并拖动图像来移动它。“预览”窗口会完全按照在 EV3 程序块显示上的显示方 式(178 像素宽及 128 像素高)来显示图像。
3
大小和位置感到满意时,请单击“下一步”。
调整对比度
使用左侧的“阈值滑块”可调整图像的对比度。更改对比度会影响最终图像中的详细信息程度。
8
设备选择器: 选择程序块或 SD 卡 内存栏: 已用和可用内存的图形概况 文件类型 占用内存的(项目、应用程序) 所选设备上存储的文件的列表 复制: 存储所选文件以便粘贴到 EV3 程序块内存或 SD 卡中 粘贴: 将以前存储的文件粘贴到所选存储设备中
删除: 从所选存储设备中删除所选文件
上传: 将所选文件上传到计算机
版本,来拥有最新技术并提高 EV3 程序块的性能和可靠性。
升级 EV3 固件
16
要升级固件,需要从计算机到 EV3 程序块的 USB 连接。计算机还必须连接到 Internet。
1. 开启 EV3 程序块并将其连接到计算机。只能使用 USB 连接进行固件升级。
2. 在“工具”菜单中选择“固件升级”。“固件升级”对话框会打开,如此处所示。
调整播放音量。
保存编辑的声音文件。
记录 可以使用计算机内置或连接的麦克风。可以通过单击记录按钮来记录最多 10 秒的自己的声音。记录会在 10 秒之后自动 停止。单击记录按钮会覆盖已记录的任何声音。 调整大小 如果文件太大,则声音文件(波形图像)会在滑块之间保持为红色。当滑块之间的波形图像为大约 5 秒长时,它会变为紫
声音编辑器
通过声音编辑器可以记录和编辑自己的声音文件。编辑的声音文件可以保存在计算机上,然后在声音模块中使用,就如同任 何现有 EV3 声音文件一样。还可以编辑现有声音文件。
在“工具”菜单中选择“声音编辑器”可打开声音编辑器。打开现有声音文件或记录自己的声音,使用滑块裁剪声音文件,然后 保存文件。
当对图像的
就绪后单击“下一步”。
编辑图像
可以通过添加线、圆圈及更多内容来进一步编辑图像。
4
打开 新建 保存 剪切: 从编辑屏幕中删除图像的一部分。 复制: 复制所选图像。 粘贴: 将所选图像置于编辑屏幕上。 可以单击图像并将其拖动到位。粘贴的图像为橙色时可以进行移动。变为黑色之后,便 无法在编辑屏幕上四处移动它们。 撤销、重做
3. 单击“检查”(“在线升级”旁)可查看是否有新固件升级可用。如果可用,则将它们下 载到计算机。
4. 从“可用固件文件”中选择最新固件版本。如果未列出所需固件版本,请按压“浏览”以 查找它。
5. 单击“下载”将固件下载到 EV3。“固件升级”对话框底部的进度条将显示固件升级的进
下载: 将文件下载到 EV3 程序块
每个 EV3 程序块均拥有 16MB 的可用内存。该存储器的一部分用于存储在首次使用时预先加载至 EV3 程序块的示例程 序、图形和声音文件。这将留下 2MB 的空间供您创建和下载文件。
9
可以通过重新安装固件将 EV3 程序块的内存还原为出厂默认状态。有关此操作的详细信息,请参见升级 EV3 固件。请注 意,重新安装 EV3 程序块的固件会删除 EV3 程序块内存中的所有文件。请在继续之前创建要保留的任何文件的备份!
铅笔: 小、中或大自由格式线绘制。
矩形: 小、中或大矩形。
椭圆: 小、中或大椭圆。
选择 5
线: 小、中或大宽度。
填充
橡皮: 小、中或大橡皮。
文本
保存图像
在完成编辑时保存图像。这会将图像保存到“项目”文件夹中以供将来使用。项目属性页面会列出项目使用的所有图像。 可以使用“图像”模式在显示模块中查找和使用保存的图像。
14
此处是同一个“我的模块”,但是此时具有用于控制以下方面的参数: 1.针对每条边驱动的距离(“距离”)。 2.机器人行进的速度(“速度”)。 3.针对每个角转弯的角度,以及 4.重复驱动命令的次数。
提示和技巧
可以在“我的模块创建器”中对模块更改参数顺序。单击左或右箭头可移动所选参模块创建器
有时会创建一个很棒的迷你程序,需要在其他项目或程序中再次使用它。 “我的模块创建器”可帮助采用此迷你程序,这是一些在工作区域中选择的模块,将它们组合在一起以创建“我的模块”。 随着时间的推移,可以建立一个“我的模块”库,可以与其他 MINDSTORMS 用户进行交换。
创建“我的模块”
色。“保存”按钮随后会变为活动状态。创建和使用的声音文件越多,EV3 程序块上剩下的内存空间越少。有关 EV3 程序 7
块内存容量的更多信息,请参见管理文件和内存。 保存 默认情况下,声音文件会以未压缩文件的形式保存到 EV3 软件的“声音”文件夹。保存的文件在“播放文件”模式中会自动出 现在声音模块列表中。
13
现在已添加了参数,请单击“完成”。 新参数“距离”需要先连接到迷你程序中的输入,然后才能控制它。
将来自参数“距离”的线连接到第一个移动槽模块的“度数”输入。这会使我们可以控制机器人将驱动的方形的大小(有关更多 信息,请参见数据线)。
返回主程序,现在会看到“我的模块”,但是此时具有一个参数用于设置方形迷你程序的边长。根据上面所选的“参数样式”, 可以直接输入值或使用滑块条。 或是如果希望机器人按三角形或六角形驱动该怎么办?
假设已创建了一个使机器人按方形驱动的迷你程序:
10
要将此迷你程序转换为模块,请使用“选择”工具,并通过拖动一个框围绕所有所需模块来选择它们。 从“工具”菜单中选择“我的模块创建器”以启动“我的模块创建器”。
11
为模块提供名称和简短描述。 选择一个“我的模块”图标以帮助标识模块。此示例使机器人按方形驱动,因此会使用带有电机的图标。 单击“完成”。 迷你程序现在会转换为其自己的模块!为项目创建的所有“我的模块”都会出现在“我的模块”面板中。
1
图像编辑器
通过图像编辑器可以创建要在 EV3 程序块上显示的图像和文本。还可以编辑现有图像文件。图像编辑器可以打 开 .rgf、.jpg、.png 和 .bmp 文件。 选择图像编辑器:在“工具”菜单中,单击“图像编辑器”。
2
编辑过程具有五个步骤:
1. 打开图像 2. 更改其大小和位置 3. 调整对比度 4. 使用编辑屏幕左侧的工具面板编辑图像。 5. 将图像保存到项目中。
可以将几乎任何长度的声音文件导入声音编辑器,但是只能保存不长于五秒的声音文件(最大 64 KB)。对于较大声音文
件,可能需要较长加载时间。声音编辑器可接受 .wav、.mp3 和 .rsf 声音文件。
记录和编辑声音
6
步骤
在计算机中打开兼容声音文件。 记录声音。 播放记录的声音。 向左和向右移动滑块来选择要使用的最佳声音部分。 可以放大或缩小以集中于所需声音部分。