用汇编语言控制小直流电机的转速
8、PWM控制直流电机实验
南昌大学实验报告学生姓名:黄鹏飞学号:6100212197 专业班级:中兴通信121实验类型:□验证□综合■设计□创新实验日期:2014-5-21 实验成绩:PWM 控制直流电机实验一、实验目的熟练掌握汇编语言程序的编辑、调试和运行的过程和方法。
了解汇编语言程序的汇编、运行环境。
1.熟悉直流电动机的工作特性。
2.学习PWM 控制直流电机转速的方法。
二、实验要求1.掌握常用的编辑工具软件(如WORD、EDIT)、MASM和LINK的使用;2.根据系统提供的直流电机驱动,使用单片机PWM 驱动直流电机,并通过简单扩展口74LS244 读入8 位开关量,来控制PWM 的占空比,从而控制直流电机的转速。
3.根据实验内容编写一个程序,并在实验仪上调试和验证;三、实验说明1.直流电机介绍:PWM 是单片机上常用的模拟量输出方法,用占空比不同的脉冲驱动直流电机转动,从而得到不同的转速。
本实验需要用到CPU 模块(F3 区)、直流电机模块(A6 区)、并行数模转换模块(D8 区)、8279 显示模块(E7 区)。
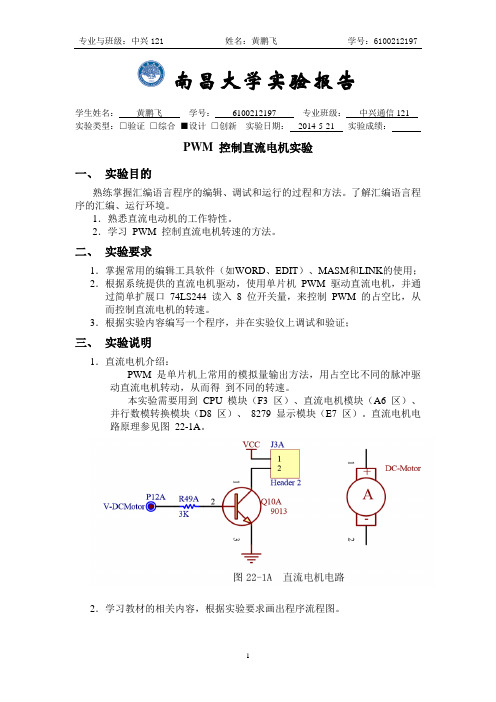
直流电机电路原理参见图22-1A。
2.学习教材的相关内容,根据实验要求画出程序流程图。
3.本例说使用的汇编的软件以一个高度集成的优化DOS软件—WinMasmV2.2。
四、实验程序;//*文件名: DCMotor FOR 8088;功能:PWM控制直流电机转速实验;接线:连接直流电机模块的V-DCMotor到8255模块的PC0;; 连接8255模块的CS_8255到CPU模块的200H;; 用导线连接CPU模块的208H到扩展输入模块的CS_244;; 用8位数据线连接八位逻辑电平输出模块的JD1E到扩展输入模块的JD2C;; 八位逻辑电平显示模块的JD4B到扩展输出模块的JD1C。
;//******************************************************************* *PA8255 EQU 200H ;8255PA口地址PB8255 EQU 201H ;8255PB口地址PC8255 EQU 202H ;8255PC口地址PCTL8255 EQU 203H ;8255控制口地址D244 EQU 208HCODE SEGMENTASSUME CS:CODESTART:PUSH CSPOP DSMOV DX,PCTL8255MOV AL,80H ;设置8255口为输出口OUT DX,ALMOV DX,D244 ; 并行输入口地址IN AL,DX ; 输入数据,读开关状态MOV AH,ALDRIVE: CALL PWMMOV DX,D244 ; 并行输入口地址IN AL,DX ; 输入数据,读开关状态CMP AL,AHJE DRIVEMOV AH,ALJMP DRIVEPWM:MOV DX,PCTL8255MOV AL,01H ;PC0: 置“1”OUT DX,ALMOV CH,0MOV CL,AHCALL DELAYMOV AL,00H ;PC0: 置“0”OUT DX,ALNOT AHMOV CH,0MOV CL,AHCALL DELAYRETDELAY: MOV AL,CLCMP AL,0JNZ TOLOOPINC CLTOLOOP:LOOP $RETCODE ENDSEND START五、实验步骤与结果1)系统各跳线器处在初始设置状态。
微机原理与汇编语言程序设计-直流电机转速控制模板

实验课题:直流电机调速控制实验内容:本实验完成的是一个实现对直流电机转速调节的应用。
编写实验程序,用ADC0809完成模拟信号到数字信号的转换。
输入模拟信号有A/D转换单元可调电位器提供的0~5V,将其转换后的数字信号读入累加器,做为控制电机的给定转速。
用8255的B口作为直流电机的控制信号输出口,通过对电机转速反馈量的运算,调节控制信号,达到控制电机匀速转动的的作用。
并将累加器中给定的转速和当前测量转速显示在屏幕上。
再通过LED灯显示出转速的大小变化。
实验目的:(1)学习掌握模/数信号转换的基本原理。
(2)掌握的ADC0809、8255芯片的使用方法。
(3)学习PC系统中扩展简单I/O接口的方法。
(4)了解实现直流电机转速调节的基本方法。
实验要求:利用微机接口实验系统的硬件资源,运用汇编语言设计实现直流电机的调速控制功能。
基本功能要求:1、利用A/D转换方式实现模拟量给定信号的采样;2、实现PWM方式直流电机速度调节;3、LED灯显示当前直流电机速度状态。
实验设备:(1)硬件要求: PC微机一台、TD-PIT实验系统一套(2)软件要求:唐都编程软件,tdpit编程软件,“轻松编程”软件实验原理:各芯片的功能简介:(1)8255的基本输出接口电路:并行接口是以数据的字节为单位与I/O设备或被控制对象之间传递信息,CPU 和接口之间的数据传递总是并行的,即可以同时进行传递8位,16位,32位等。
8255可编程外围接口芯片是具有A、B、C三个并行接口,+5V单电源供电,能在以下三种方式下工作:方式0—基本输入/出方式、方式1—选通输入/出方式、方式2—双向选通工作方式。
8255的内部结构图和引脚图如下:本实验利用8255的A口作为输出口,控制8个单色LED灯,来实现电机转速的大小显示。
(2)转速调节原理:* PWM的占空比决定输出到直流电机的平均电压.PWM不是调节电流的.PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高.如果占空比为0%,那么高电平时间为0,则没有电压输出.如果占空比为100%,那么输出全部电压.所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节.在使用PWM控制的直流无刷电动机中,PWM控制有两种方式:1.使用PWM信号,控制三极管的导通时间,导通的时间越长,那么做功的时间越长,电机的转速就越高2.使用PWM控制信号控制三极管导通时间,改变控制电压高低来实现** 利用实验平台上8255的PB0产生脉冲信号作为控制量,经驱动电路驱动电机运转。
基于8086的小型直流电机闭环调速系统PID控制设计
微机原理课设报告目录一、需求分析与解决方案 (4)1.1 需求分析 (4)1.1.1实验题目 (4)1.1.2 实验题目问题分析 (4)1.2 解决问题的思路 (4)1.2.1 总体思路 (4)1.2.2 硬件设计器件选择 (4)1.2.3 软件整体思路 (6)二、硬件设计详解 (6)2.1 片选模块 (6)2.2 中断定时模块 (8)2.3 PWM发生模块 (9)2.4 调速模块 (10)2.5 测速模块 (11)2.6 参数显示模块 (11)2.7 电机驱动模块 (12)2.8 参数调整模块 (12)2.9串口通信模块 (13)三、软件设计详解 (13)3.1 下位机程序流程图 (13)3.2 下位机程序清单 (14)3.2.1宏定义 (14)3.2.2全局变量声明 (14)3.2.3 系统初始化 (15)3.2.4 主函数 (15)3.2.5 中断服务子程序 (16)3.2.6 显示子程序 (16)3.3 PID简介 (16)3.4 labview上位机制作 (17)3.5 辅助软件选择 (18)四、实验条件 (18)五、模块调试 (18)5.1 片选模块调试 (18)5.2 中断定时模块调试 (18)5.3 PWM发生模块调试 (19)5.4 调速模块调试 (20)5.5 测速模块调试 (20)5.6 参数显示模块调试 (21)5.7 电机驱动模块调试 (21)5.8 参数调整模块调试 (21)5.9 串口通信模块调试 (22)5.10 labview上位机的调试 (22)六、实验结果讨论及改进措施 (23)6.1实验结果讨论 (23)6.2 改进措施 (23)七、实验心得体会 (24)八、参考文献 (24)九、附录一(硬件电路图) (25)十、附录二(软件源代码) (25)小型直流电机闭环调速系统PID控制设计一、需求分析与解决方案1.1 需求分析1.1.1实验题目(1)、设计基于80x86微机接口控制电路;(2)、分别用C语言或汇编语言或VC++编程完成硬件接口功能设计;(3)、程序功能要求:电机速度由按键分段给定或电位器连续给定,计算机屏幕和数码管同步跟踪显示当前给定速度和电机实际运行速度,实现PID参数在线显示和修改。
直流电机速度控制课程设计

直流电机速度控制1设计内容及要求1.1设计目的设计制作和调试一个由MCS51单片机组成的直流测控系统。
通过这个过程学习熟悉键盘控制和七段数码管的使用,掌握直流电机的速度控制和测试方法。
1.2预习和参考MCS51单片机汇编程序语言、计算机控制技术、自动控制原理、1.3 设计(设计)要求设计指标1.在显示器上显示任意四位十进制数2.将8个键定义键值为0~7,按任意键在显示器上显示对应键值3.实现功能:(1)定义键盘按键:5个为数字键0~4;3个功能键:设置SET、清零 CLR、开始START;(2)显示器上的四位可显示每分钟的速度;(3)通过键盘的按键,设置直流电机每分钟的速度值;(4)按START键启动电机开始转动,按SET键停止;按CLR键清零。
2控制芯片选择根据实验要求选择80C31芯片。
选择该芯片可以根据控制开关按钮的开关状态,控制数码管的数字显示以及变频直流电动机的转速。
80C31单片机,是8位高性能单片机,具有40根引脚。
属于标准的MCS-51的HCMOS产品。
它结合了HMOS的高速和高密度技术及CHMOS的低功耗特征,标准MCS-51单片机的体系结构和指令系统。
80C31内置中央处理单元、128字节内部数据存储器RAM、32个双向输入/输出(I/O)口、2个16位定时/计数器和5个两级中断结构,一个全双工串行通信口,片内时钟振荡电路。
40根引脚按其功能可分为四类:1. 电源线2根VCC:编程和正常操作时的电源电压,接+5V。
VSS:地电平。
2. 晶振:2根XTAL1:振荡器的反相放大器输入。
使用外部震荡器是必须接地。
XTAL2:振荡器的反相放大器输出和内部时钟发生器的输入。
当使用外部振荡器时用于输入外部振荡信号。
3. I/O口有p0、p1、p2、p3共四个8位口,32根I/O线,其功能如下:P0.0~P0.7 (AD0~AD7)是I/O端口O的引脚,端口O是一个8位漏极开路的双向I/O端口。
自动往返小汽车的控制系统

自动往返小汽车的控制系统目录自动往返行驶小车的设计(搞要) (3)第一章引言与概述 (4)第二章系统设计总概述 (5)第三章单片机简介 (6)第四章主要电路的设计 (8)第五章系统硬件电路设计 (11)第六章系统软件设计 (16)结束语 (17)参考文献 (18)附表 (19)自动往返行驶汽小车的设计【摘要】本设计介绍了AT89S51系列单片机为控制芯片,控制自动往返小汽车控制系统硬件和软件的设计。
通过小汽车对路面的检测和速度的调节,把检测的信号送入单片机系统,经微机处理后,结合键盘控制实现LED显示,并可实现对小汽车速度,转向的控制和绕过障碍物的能力。
附以外围电路,运用单片机的运算和处理能力来实现小车的自动加速、限速、减速、定时,语音、前进、后退、左转、右转、显示行驶速度、行驶路程、行驶时间、等智能控制系统。
控制自动往返小汽车控制系统硬件和软件设计。
【关键字】单片机;AT89S51芯片;自动往返小汽车;光电检测器。
第一章引言与概述伴随着电子信息技术的飞速发展,单片机的应用越来越广泛,电子这个原本没有生命的东西越来越具有智慧了,而单片机在这当中充当着“大脑”的作用,指挥着系统完成其工作。
单片机通过用汇编语言或者C语言编程,可以实现不同情况下的,不同电路的自动控制,用它可以开发很多智能的玩具,如机器人、遥控飞机、智能车,实际生活中的很多电器,例如电冰箱、全自动洗衣机、空调等,还有就是很多测量仪器以及高科技的空间探测,宇宙探索等都用到单片机,可以说现在生活中大多数的智能物品都用到单片机,围绕单片机以及嵌入式系统形成的电子产业将会是一个持续发展,愈来愈具有竞争力,愈来愈具有生命力的产业,电子世界将会更具有魅力。
现今的世界,传感器的应用无处不在,自动电梯,保安系统,路灯的控制等,天气中的温度、湿度等等。
而自动导航在实际中的应用也很广,包括航天事业中的自动导航,全球定位系统,视觉导航等,随着传感器技术,计算机网络技术,图像处理技术的飞速发展,自动导航将进一步得到发展,而智能机器人也将进一步发展,代替人在一些环境艰难的地方工作。
应用DAC0832单片机控制小直流电机转速的设计

应用DAC0832单片机控制小直流电机转速的设计《微机原理、汇编与接口技术》课程设计报告书课程设计报告书2009~2010学年第1学期学院: ****课程: 微机原理与应用姓名: **学号: ***专业班级: 自动化***指导教师: ***一、设计题目:8086微机应用DAC0832控制小直流电机转速的设计二、设计目的:1《微机原理、汇编与接口技术》课程设计报告书巩固“微机原理”课程学过的知识,加强理论与实践的联系。
通过本课程设计,使学生初步了解8086系列微机系统的硬件设备,学会8086系列编程指令的基本功能。
三、设计内容与要求:1、内容采用8086CPU构建微机系统,扩展4K EPROM和2K静态RAM作为存储系统,采用最小模式,利用DAC0832,编制程序输出双极性模拟电压驱动小直流电机,使电机能以不同转速正反向运行。
2、设计要求(1)、查阅文献资料,了解DAC0832双极性电压输出控制原理,并在报告书中综述之。
(2)、设计系统的硬件连接原理图,对原理图加以说明。
(3)、画出程序框图,并说明。
(4)、编写应用程序,并注解程序。
(5)、提交课程设计说明书。
四、设计资料与参数:1、电机转速由8个按钮开关以补码形式给定输入,并以发光二极管形式显示出来。
电机的转速变化范围为反向500 rpm,正向500rpm;2、DAC0832双极性电压输出控制原理,控制小直流电机以不同转速运行。
3、小直流电机额定电压为5V。
电源:5V由外部提供。
五、详细设计:(一)DAC0832双极性电压输出控制原理2《微机原理、汇编与接口技术》课程设计报告书DAC0832是20引脚双列直插式芯片,内部结构和引脚信号如图所示。
图1 DAC 0832的内部结构和引脚在某些微机控制系统中,要求D/A的输出电压是双极性的。
例如要求输出(-5,+5)V。
在这种情况下,D/A的输出电路要作相应的变化。
图1就是DA0832双极性输出电路实例。
基于8086的直流电机的控制
目录一、直流电机控制的设计思路: (2)二、直流电机控制的硬件框图: (2)2.1并行I\O口输入、输出 (3)2.2输出锁存 (3)2.3电机驱动模块 (4)2.4仿真模拟图 (5)三、软件设计 (6)3.1程序流程图 (6)3.2程序代码 (7)四、项目体会 (9)一、直流电机控制的设计思路:1)通过按键改变电动机的启动与停止,当启动后再由按键选择工作方式。
2)通过改变pwm的极性从而改变电机的转向,实现正反转。
3)可实现顺、逆旋转的直接切换,不用按下停止后再启动反向运转。
二、直流电机控制的硬件框图:通过按钮来控制电机的顺、逆时针转,并且可以实现顺、逆旋转直接切换,无需中间停顿。
2.1并行I\O口输入、输出采用8255A作为信号的输入与输出接口,使用前需设置芯片的控制字来确定其工作方式,以及端口的使用。
本次采用的控制字为90H,即A组工作在方式0,作为输入接口,连接按钮,B组工作在方式0,作为输出接口连接电机驱动模块。
8255AI\O接口使用2.2输出锁存使用常见的74HC373芯片来实现输出锁存,由于按钮具有复位功能,当按钮按下后的一瞬间才产生输入,所以需要输出锁存来保持电机的连续运转,本次采用两块74HC373,一块与8255A的A0、A1口连接作为电机运行信号的控制,另一块与3-8译码器74H138相连,接入8255A的片选信号输入端,选中8255A运行。
74H373接口使用2.3电机驱动模块通过对IN1、IN2的状态改变来控制L293D芯片的输出,从而实现电机的顺、逆时针转动电机驱动模块2.4仿真模拟图三、软件设计3.1程序流程图当按下按键时,检测A口是否为01H,若是即跳转到子程序MOT1,实现电机顺时针旋转,否则检测A口是否为02H,若是即跳转到子程序MOT2,实现电机逆时针旋转,否则检测A口是否为04H,若是即跳转到子程序MOT3,使电机停止转动。
再进入循环。
3.2程序代码CODE SEGMENT 'CODE'ASSUME CS:CODE,SS:STACK,DS:DATA ;定义数据段IOCON EQU 8006HIOA EQU 8000HIOBEQU 8002H 定义端口的地址 IOC EQU 8004HSTART:MOV AX, DATAMOV DS, AXMOV AX, STACKMOV SS, AXMOV AX, TOP1MOV SP, AXMOV AL,90H A 口为输入,B 口为输出 MOV DX,IOCON 控制字设置,AB 端口为“0”方式下,控制字10010000B OUT DX,AL NOP NOP TEST_BU:MOV DX,IOA IN AL,DX 检测总线系统 MOV DX,IOA IN AL,DX NOP test_1: TEST AL,01HJE MOT1 test_2: TEST AL,02HJE MOT2 test_3: TEST AL,04HJE MOT3 JMP TEST_BU MOT1:MOV AL,0FEHMOV DX,IOB 往B 端口中输出1111 1110B=0FEH 使电机顺时针旋转OUT DX,AL MOV DX,IOA IN AL,DX ;从A 口读入数据 TEST AL,02H ;测试是否等于0000 0010即按下逆时针按钮 JE MOT2 ;如果是按下逆时针按钮,则跳转到MOT2 TEST AL,04H JE MOT3 JMP MOT1 MOT2:MOV AL,0FDHMOV DX,IOB向B 端口中输入1111 1101B=0FDH使电机逆时针旋转 OUT DX,AL MOV DX,IOA IN AL,DX ;从A 口读入数据 TEST AL,01H 测试A 口数据是否为01H ,若是则跳到 JE MOT1 MOT1顺时针旋转模式 TEST AL,04H 测试A 口数据是否为04H,JE MOT3 若是则跳转到MOT3停止模式JMP MOT2 ;否则跳转到MOT2逆时针旋转模式 MOT3:MOV AL,0FFHMOV DX,IOB 向B 端口输出11111111B=0FFH 使电机停止 OUT DX,AL MOV DX,IOAIN AL,DX TEST AL,01H JE MOT1TEST AL,02H JE MOT2JMP MOT3CODE ENDSSTACK SEGMENT 'STACK' STA DB 100 DUP(?) TOP1 EQU LENGTH STA STACK ENDS DATA SEGMENT 'DATA' DATA ENDSEND START四、项目体会微机原理与接口技术的课程历时一个学期,通过自己编写、运行程序,不仅巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。
单片机课程设计完整版《PWM直流电动机调速控制系统》

单片机原理及应用课程设计报告设计题目:学院:专业:班级:学号:学生姓名:指导教师:年月日目录设计题目 (1)1 设计要求及主要技术指标: (1)1.1 设计要求 (1)1.2 主要技术指标 (2)2 设计过程 (2)2.1 题目分析 (4)2.2 整体构思 (4)2.3 具体实现 ................... 错误!未定义书签。
3 元件说明及相关计算 (5)3.1 元件说明 (5)3.2 相关计算 (6)4 调试过程 (6)4.1 调试过程 (6)4.2 遇到问题及解决措施 (7)5 心得体会 (7)参考文献 (8)附录一:电路原理图 (9)附录二:程序清单 (9)设计题目:PWM直流电机调速系统本文设计的PWM直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED 液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;定时中断;电动机;PWM波形;LED显示器;51单片机1 设计要求及主要技术指标:基于MCS-51系列单片机AT89C52,设计一个单片机控制的直流电动机PWM调速控制装置。
1.1 设计要求(1)在系统中扩展直流电动机控制驱动电路L298,驱动直流测速电动机。
(2)使用定时器产生可控的PWM波,通过按键改变PWM占空比,控制直流电动机的转速。
(3)设计一个4个按键的键盘。
K1:“启动/停止”。
K2:“正转/反转”。
K3:“加速”。
K4:“减速”。
(4)手动控制。
在键盘上设置两个按键----直流电动机加速和直流电动机减速键。
单片机控制直流电机的转速的
单片机控制直流电机的转速的一、引言在电子技术领域中,单片机是一种非常常见和实用的微型计算机,被广泛应用于各种电子设备和控制系统中。
而直流电机是一种常见的电动机类型,具有简单、可靠、易控制等优点,在许多应用中被广泛使用。
本文将探讨单片机如何控制直流电机的转速,介绍与此相关的基本概念、方法和技术。
二、直流电机基础知识在探讨单片机控制直流电机转速之前,我们先了解一些直流电机的基础知识。
直流电机是一种将直流电能转化为机械能的设备,由电枢和电磁场部分组成。
电枢是直流电机的旋转部分,通常由定子、转子和电刷组成。
电磁场部分则包括磁铁或电磁线圈等元件。
直流电机转速的控制可以通过改变电压或电流来实现。
三、单片机控制直流电机转速的原理单片机作为一个微型计算机,具有处理数据和控制外部设备的能力。
通过单片机的输出引脚和电机驱动器连接,可以通过控制输出信号的状态和频率来改变电机的转速。
单片机控制电机转速的原理基于脉宽调制(PWM)技术,通过调节脉宽的高低来控制电机供电电压的平均值,从而控制电机的转速。
四、单片机控制直流电机转速的方法不同的单片机有不同的控制方式和接口,下面将介绍几种常见的单片机控制直流电机转速的方法:1. 电平控制法:这种方法基于单片机的输出引脚的高低电平控制。
通过在单片机程序中设置输出引脚的电平状态,可以控制电机的供电电压。
高电平表示通电,低电平表示断电,通过改变通断时间的比例可以控制电机的转速。
2. PWM控制法:这是一种较为常见和常用的方法。
通过使用单片机的PWM输出功能,可以实现对电机的精确控制。
PWM输出由一个周期性的正方形波形组成,通过调节高电平和低电平的比例和周期来控制电机的转速。
通常,周期越小,高电平占空比越大,电机转速越高。
3. 编码器反馈控制法:在一些需要更为精确的控制和位置反馈的应用中,可以使用编码器来实现电机转速的控制。
编码器是一种能够测量电机转动位置和速度的装置,通过将编码器与单片机连接,可以实时监测电机的转速,并根据反馈信号进行调整。
89C52单片机控制PWM调速电路实现小功率直流电机的转速

89C52单片机控制PWM调速电路实现小功率直流电机的转速调节,并要将其实时转速用LED 管显示出来。
而本系统必须符合以下几点要求:(1) 在(1000—5500)转/分内对直流电机进行任意调速,最小调速级差为1转/分。
(2)电机能在所设速度下稳定运转,运转速度与设定速度之差小于±20转/分。
(3)电机启动和加减80%额定负载时,其转速能迅速回到设定值,转速超调±5%内。
(4)利用按键和LED数码管设置速度,设置方便,快捷。
(5)利用LED数码管实时显示电机速度。
(6)电机能进行正反转控制。
控制方面,本设计是采用定时器控制I/O口输出PWM信号驱动斩波电路控制电机运转和调速;利用单片机外部中断引脚的捕获功能、电机同轴带缺口的圆盘、光电耦合器来测量转速;并将测得转速和设定转速进行PI运算后输出,实现闭环控制;转向调节则是用的桥式电路。
显示是利用8位LED数码管,用按键进行设定。
下面简单介绍下硬件组成和一些软件原理:一、硬件电路。
1、单片机选用的是STC的89C52,20MHz晶振。
2、显示部分比较简单,用的8位7段数码管同时显示设定速度和实时速度。
采用74LS164串行移位输出,只占用单片机3个I/O口,刷新频率100Hz。
3、PWM驱动电路。
使用了9012和8050两个三极管来驱动,相信网上很多的,也不用我多说,只是别忘了加上续流二极管和两个三极管之间的限流电阻就是。
4、测速电路。
测速电路用的是光耦测量转动圆盘引起的脉冲宽度,从而可得单片机的实时速度,精度很高,可达千分之一。
用的是外部中断的。
好像是捕获模式,忘记了~呵呵!5、转向调节电路。
转向调节,由于是后来加上去的,所以就没有使用单片机控制,直接用硬件实现,但其实原理是一样的。
原理是利用开关控制继电器,然后控制桥路对电机实施转向控制。
另外用一个同轴电机按正反方向接2个LED用来指示方向。
PS:因为这是小功率电机,所以就算没有制动电路,强制转向,也不会对电机造成损坏。
微机原理实验小直流电机转速控制及测速实验
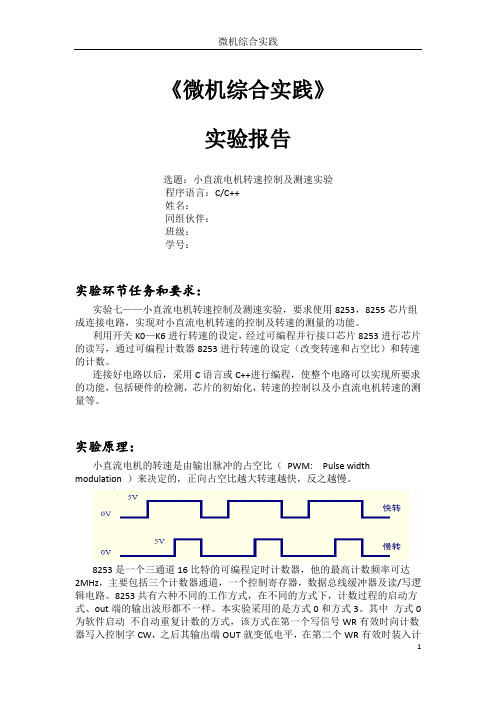
《微机综合实践》实验报告选题:小直流电机转速控制及测速实验程序语言:C/C++姓名:同组伙伴:班级:学号:实验环节任务和要求:实验七——小直流电机转速控制及测速实验,要求使用8253,8255芯片组成连接电路,实现对小直流电机转速的控制及转速的测量的功能。
利用开关K0—K6进行转速的设定,经过可编程并行接口芯片8253进行芯片的读写,通过可编程计数器8253进行转速的设定(改变转速和占空比)和转速的计数。
连接好电路以后,采用C语言或C++进行编程,使整个电路可以实现所要求的功能,包括硬件的检测,芯片的初始化,转速的控制以及小直流电机转速的测量等。
实验原理:小直流电机的转速是由输出脉冲的占空比(PWM: Pulse width modulation )来决定的,正向占空比越大转速越快,反之越慢。
8253是一个三通道16比特的可编程定时计数器,他的最高计数频率可达2MHz,主要包括三个计数器通道,一个控制寄存器,数据总线缓冲器及读/写逻辑电路。
8253共有六种不同的工作方式,在不同的方式下,计数过程的启动方式、out端的输出波形都不一样。
本实验采用的是方式0和方式3。
其中方式0为软件启动不自动重复计数的方式,该方式在第一个写信号WR有效时向计数器写入控制字CW,之后其输出端OUT就变低电平,在第二个WR有效时装入计数初值,然后经过一个CLK信号的上升沿和下降沿,初值进入计数器。
当计数减到零——计数结束后,OUT输出变为高电平。
8253的方式3是方波发生器,在这个方式下,计时器既可以用软件启动,也可以用硬件启动。
方式3也可以自动重复计数。
只是计数到N/2时,OUT变为低,再接着计数到0时,OUT又变为高,并开始新一轮计数。
试验中利用方式3产生一定频率的方波信号,并且将方波信号作为基准信号与另一信号相比较,进行转速的测量。
而另一个计数器采用方式0进行计数操作,并与方波信号相比较,从而得到小直流电机的真正转速。
单片机汇编语言实现小型直流电机的控制
江苏师范大学实习(设计)报告小型直流电机转速控制系统设计姓名:班级:学号:实习(设计)科目:单片机原理及应用实习(设计)地点:江苏师范大学12#楼实习 (设计) 时间: 2012/12/3----2012/12/21电气工程及其自动化学院摘要 (5)ABSTRACT (5)前言 (6)1. 系统方案与论证 (6)1.1基本要求 (6)1.2系统方案选择 (6)1.2.1 系统基本结构框 (6)1.2.2 方案论证与选择 (7)2. 电路原理图 (8)2.1.1关于89C52...........................................................................................................2.1.2关于DAC0832.....................................................................................................2.2.1系统电路图.........................................................................................................3. 系统程序设计 (16)3.1.1流程图...............................................................................................................3.1.2程序...................................................................................................................4.结论 (18)5.致谢 (18)参考文献 (19)学期末的单片机实训,在实际操作中让我进一步的了解单片、学习单片机,从而更好的掌握了单片机,达到能够简单的应用单片机的目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海电力学院实验报告计算机硬件实验课程
题目:小直流电机调速
班级:
姓名:
学号:
一、实验目的
1)掌握直流电机的驱动原理。
2)了解直流电机调速的方法。
二、实验内容
1)用DAC0832D/A 转换电路的输出,经放大后驱动直流电机。
2)编制程序,改变DAC0832输出经放大后的方波信号的占空比来控制电机转速。
三、实验线路
GC21
8550
V c c
20
Io ut111
lsb D I0
7Io ut212
DI16DI25R fb 9DI34DI416Vre f
8
DI515DI614msbDI7
13ILE 19W R218C S 1W R1
2
Xfe r
17
UB110832
GC22
8050
+12V
R C24300
GN D
R C23300
VCC
D7D0D1D J
D2D3GN D
D4D5D6DM OUT
VCC
VCC
R6
4.7K VCC
C4104
GN D
CS_0832
Y6
W R
3
21
4
11
UB12A
LM 324
5
67
UB12B
LM 324
R B11
10K
R B1210K
R B145.1K
R B1310K
-12V
DA OUT
+12V
GN D
VCC
C B12
104GN D
-5V
图9-1
四、连接方法
1)DAC0832的片选信号CS -0832连到译码输出Y6。
0832的输出DAOUT 端连到插孔DJ 。
2)观察直流电机的转速。
3)本实验设备上有可以通过光电管测速,FOUT 有脉冲输出,通过测量脉冲频率可以测速。
五、实验设计与实现
1)确认连线正确性
2)从起始地址开始连续运行程序
CODE SEGMENT ;定义代码段
ASSUME CS:CODE ;说明定义的代码段用CS寄存器寻址DAPORT EQU 0060H ;表示DAPORT-0060H
START: MOV AL,0FFH ;将0FFH送入AL
DACON1:MOV DX,DAPORT ;将DAPORT送入DX
OUT DX,AL ;将AL的内容输出到地址为DX的端口
MOV CX,1000H ;将1000H送入CX
DACO2: LOOP DACO2 ;CX-1,若CX不等于零则重复DACO2,
若CX=0 ,则执行下一条指令DEC AL ;AL-1
JNZ DACON1 ;若ZF=0 则跳转到DACON1,否则执行
下一条指令
DACO3: MOV DX,DAPORT ;将0060H送入DX
OUT DX,AL ;将AL的内容输出到地址为0060H的端
口
MOV CX,0800H ;将0800H送入CX
DACO4: LOOP DACO4 ;CX-1,若CX不等于零则重复DACO4,
若CX=0 ,则执行下一条指令INC AL ;AL+1
JNZ DACO3 ;若ZF=0则跳转到DACO3,否则执行
下一条指令
JMP START ;无条件跳转到START
CODE ENDS
END START
3)观察直流电机的转速。