时钟和延迟的一些定义
FPGA设计时钟数据延时实例分析
FPGA设计系统时钟的影响因素及其分析时钟是整个电路最重要、最特殊的信号,系统内大部分器件的动作都是在时钟的跳变沿上进行,这就要求时钟信号时延差要非常小,否则就可能造成时序逻辑状态出错;因而明确FPGA设计中决定系统时钟的因素,尽量较小时钟的延时对保证设计的稳定性有非常重要的意义。
1.1 建立时间与保持时间建立时间(Tsu:set up time)是指在时钟沿到来之前数据从不稳定到稳定所需的时间,如果建立的时间不满足要求那么数据将不能在这个时钟上升沿被稳定的打入触发器;保持时间(Th:hold time)是指数据稳定后保持的时间,如果保持时间不满足要求那么数据同样也不能被稳定的打入触发器。
建立与保持时间的简单示意图如下图1所示。
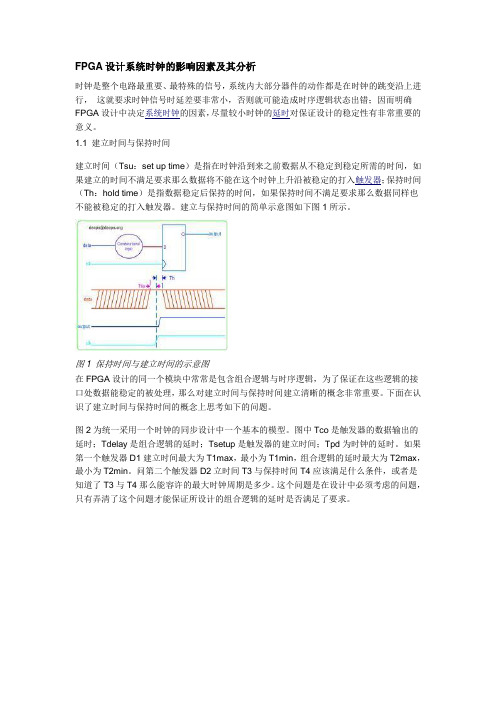
图1 保持时间与建立时间的示意图在FPGA设计的同一个模块中常常是包含组合逻辑与时序逻辑,为了保证在这些逻辑的接口处数据能稳定的被处理,那么对建立时间与保持时间建立清晰的概念非常重要。
下面在认识了建立时间与保持时间的概念上思考如下的问题。
图2为统一采用一个时钟的同步设计中一个基本的模型。
图中Tco是触发器的数据输出的延时;Tdelay是组合逻辑的延时;Tsetup是触发器的建立时间;Tpd为时钟的延时。
如果第一个触发器D1建立时间最大为T1max,最小为T1min,组合逻辑的延时最大为T2max,最小为T2min。
问第二个触发器D2立时间T3与保持时间T4应该满足什么条件,或者是知道了T3与T4那么能容许的最大时钟周期是多少。
这个问题是在设计中必须考虑的问题,只有弄清了这个问题才能保证所设计的组合逻辑的延时是否满足了要求。
图2 同步设计中的一个基本模型下面通过时序图来分析:设第一个触发器的输入为D1,输出为Q1,第二个触发器的输入为D2,输出为Q2;时钟统一在上升沿进行采样,为了便于分析我们讨论两种情况即第一:假设时钟的延时Tpd 为零,其实这种情况在FPGA设计中是常常满足的,由于在FPGA设计中一般是采用统一的系统时钟,也就是利用从全局时钟管脚输入的时钟,这样在内部时钟的延时完全可以忽略不计。
DC概论2
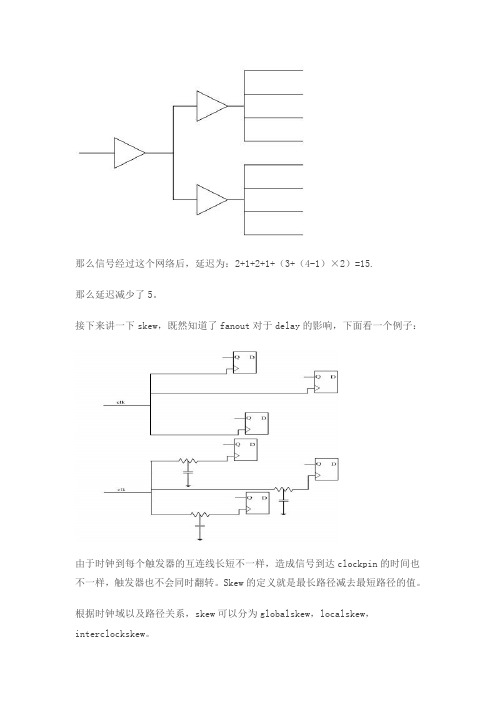
那么信号经过这个网络后,延迟为:2+1+2+1+(3+(4-1)×2)=15.那么延迟减少了5。
接下来讲一下skew,既然知道了fanout对于delay的影响,下面看一个例子:由于时钟到每个触发器的互连线长短不一样,造成信号到达clockpin的时间也不一样,触发器也不会同时翻转。
Skew的定义就是最长路径减去最短路径的值。
根据时钟域以及路径关系,skew可以分为globalskew,localskew,interclockskew。
Globalskew是指,同一时钟域,任意路径的最大skew。
Localskew是指,同一时钟域,任意2个有逻辑关联关系的路径最大skew。
interClockskew是指,不同时钟域之间路径的最大skew另外还有一个usefulskew。
本来打算在setuptime和holdtime中讲解。
这里先大概说下如下图:时钟周期为10ns,各时钟路径延迟如下:可以看到有一条路径的slack 为-1,说明这条路径违规。
可以看到与这条路径相关的skew是T3-T2=-1ns。
下面我们利用usefulskew向前面一个slack比较充裕的路径(slack=2ns)借点time,来修正现在这条路径。
如下图:经过usefulskew,修正了原来的violator。
这就是usefulskew的作用,可以向前,或者向后接time来修正violator忽然想起来这三个概念的时候有点模糊,所以重新看了下,下面总结如下:传输时间(propagationtime):输入信号幅度在50%到输出信号幅度达到50%的时间间隔叫做传输时间,有高/低和低/高两种传输时间。
转换时间(transitiontime):输出信号幅度由10%达到90%的时间间隔,有高/低和低/高两种转换时间。
延迟时间(delaytime):输入信号在幅度为10%和输出信号达到10%的瞬间之间的时间间隔叫做延迟时间,分为高/低延迟时间和低/高延迟时间(高/低和低/高输出波形的变化过程)。
Linux设备驱动程序学习(10)-时间、延迟及延缓操作
Linux设备驱动程序学习(10)-时间、延迟及延缓操作Linux设备驱动程序学习(10)-时间、延迟及延缓操作度量时间差时钟中断由系统定时硬件以周期性的间隔产生,这个间隔由内核根据HZ 值来设定,HZ 是一个体系依赖的值,在<linux/param.h>中定义或该文件包含的某个子平台相关文件中。
作为通用的规则,即便如果知道HZ 的值,在编程时应当不依赖这个特定值,而始终使用HZ。
对于当前版本,我们应完全信任内核开发者,他们已经选择了最适合的HZ值,最好保持HZ 的默认值。
对用户空间,内核HZ几乎完全隐藏,用户HZ 始终扩展为100。
当用户空间程序包含param.h,且每个报告给用户空间的计数器都做了相应转换。
对用户来说确切的HZ 值只能通过/proc/interrupts 获得:/proc/interrup ts 的计数值除以/proc/uptime 中报告的系统运行时间。
对于ARM体系结构:在<linux/param.h>文件中的定义如下:也就是说:HZ 由__KERNEL__和CONFIG_HZ决定。
若未定义__KERNEL__,H Z为100;否则为CONFIG_H Z。
而CONFIG_HZ是在内核的根目录的.config文件中定义,并没有在make menuconfig的配置选项中出现。
Linux的\arch\arm\configs\s3c2410_defconfig文件中的定义为:所以正常情况下s3c24x0的HZ为200。
这一数值在后面的实验中可以证实。
每次发生一个时钟中断,内核内部计数器的值就加一。
这个计数器在系统启动时初始化为0,因此它代表本次系统启动以来的时钟嘀哒数。
这个计数器是一个64-位变量( 即便在32-位的体系上)并且称为“jiffies_64”。
但是驱动通常访问jiffies 变量(unsigned long)(根据体系结构的不同:可能是jiffies_64 ,可能是jiffies_64 的低32位)。
关于各种延时
关于各种延时在Linux中,如果是应用层下的一些应用,我们可以:1)调用unsigned int sleep(unsigned int second);函数去定时,这个时候它是秒级的;头文件为<unistd.h>;2)调用int usleep(useconds_t);函数去定时,这个时候它是微秒级的;头文件为<unistd.h>;3)调用高精度睡眠int nanosleep(const struct timespec * rep, struct timespec *rem);是一个相比标准UNIX 的sleep 调用具有更高高精度的版本。
和普通的sleep 调用计算整秒数不同,nanosleep 接受一个指向一个struct timespec 对象的指针作为参数,它可以表示毫微秒(nanosecond,十亿分之一秒)的时间。
然而,了解Linux 内核的工作细节后可知,nanosleep 所提供的真正精确度是10毫秒——比sleep 提供的要精确。
这个附加的精确度非常有用,比如说,可以根为反复进行的任务设置更短的间隔。
struct timespec 由两部分构成:tv_sec 表示整秒数部分;tv_nsec 则表示毫微秒。
tv_nesc 的值必须小于109。
nanosleep 相比sleep具有另一个优点。
与sleep 相同,nanosleep 调用可以被信号中断,这是errno 将被设置为EINTR 而调用将返回-1。
但是,nanosleep 的第二个参数,另一个指向struct timespec 对象的指针,如果不为NULL 则在这种情况下它将被写入剩余的时间(这就是所请求的睡眠时间和实际睡眠时间的差)。
这使重新开始睡眠变的很容易。
头文件<time.h>。
以下是内核中的:1.udelay(); mdelay(); ndelay();实现的原理本质上都是忙等待,ndelay和mdelay都是通过udelay衍生出来的,我们使用这些函数的实现往往会碰到编译器的警告implicit declaration of function 'udelay',这往往是由于头文件的使用不当造成的。
STA在芯片设计后端的应用
STA在芯片设计后端的应用摘要:在芯片设计的后端,很多厂家要求引入STA分析。
在prelayout和postlayout都要进行。
本文介绍了在prelayout和postlayout两个阶段STA的约束文件的编写方法和一些相关命令,并介绍了STA的规划.关键词:STA约束 STA规划1 引言在芯片设计的流程中,后期的验证占了很长的时间。
人们通常采用的验证方法是动态的仿真,此种方法的优点是比较直观。
但当芯片的门数达到上百万门。
用动态仿真所消耗的时间很长,而且分析的覆盖面也不全。
现在很多厂家要求引入STA,有的要求在prelayout时就进行STA分析,例如TI的Magma流程,它在prelayout时将网表与STA约束读入,可以预先估计到postlayout后的timing 情况,从而节约了postlayout阶段的时间。
在postlayout 进行STA分析可以在很短时间内知道芯片的timing情况,缩短了ECO的时间。
但是由于prelayout和postlayout的情况不一样,prelayout时,时钟数没有完全布好,所以要对延迟进行估算。
Postlayout时,时钟数已经布好,延迟只需从sdf中读取,所以在两个阶段STA 的约束是不一样的。
2 STA的基本概念要比较全面地分析芯片的timing情况,书写完善的约束文件是很重要的。
首先必须了解静态时序分析的基本原理。
静态时序分析实际上就是把整个芯片按照时钟分成timing paths,只要timing paths经过的地方,timing都会被分析到。
它在分析时包含下列三个步骤 :(1)将整个设计按照不同的时钟域(path group)分为不同的时钟路径(timing paths)(2) 计算每个timing path的延迟信息(3) 检查延迟是否满足要求3 STA约束的编写3.1 STA的分析方式STA分析主要有三种分析方式:single、worst_best、on_chip_variationSingle: 在单一的情况下进行分析,即在worst情况下同时进行setup/hold分析或在best情况下同时进行setup/hold分析。
时序及相关概念
时序及相关概念以下我把时序分为两部分,只是为了下文介绍起来作为归类,非官方分类方法。
第一时序:CL-tRCD-tRP-tRAS-CR,就是我们常说的5个主要时序。
第二时序:(包含所有XMP时序)在讲时序之前,我想先让大家明白一些概念。
内存时钟信号是方波,DDR内存在时钟信号上升和下降时各进行一次数据传输,所以会有等效两倍传输率的关系。
例如DDR3-1333的实际工作频率是666.7MHz,每秒传输数据666.7*2=1333百万次,即1333MT/s,也就是我们说的等效频率1333MHz,再由每条内存位宽是64bit,那么它的带宽就是:1333MT/s*64bit/8(8bit是一字节)=10667MB/s。
所谓时序,就是内存的时钟周期数值,脉冲信号经过上升再下降,到下一次上升之前叫做一个时钟周期,随着内存频率提升,这个周期会变短。
例如CL9的意思就是CL这个操作的时间是9个时钟周期。
另外还要搞清楚一些基本术语:Cell:颗粒中的一个数据存储单元叫做一个Cell,由一个电容和一个N沟道MOSFET组成。
Bank:8bit的内存颗粒,一个颗粒叫做一个bank,4bit的颗粒,正反两个颗粒合起来叫做一个bank。
一根内存是64bit,如果是单面就是8个8bit颗粒,如果是双面,那就是16个4bit 的颗粒分别在两面,不算ECC颗粒。
Rank:内存PCB的一面所有颗粒叫做一个rank,目前在Unbuffered台式机内存上,通常一面是8个颗粒,所以单面内存就是1个rank,8个bank,双面内存就是2个rank,8个bank。
Bank与rank的定义是SPD信息的一部分,在AIDA64中SPD一栏可以看到。
DIMM:指一条可传输64bit数据的内存PCB,也就是内存颗粒的载体,算上ECC芯片,一条DIMM PCB最多可以容纳18个芯片。
第一时序CAS Latency(CL):CAS即Column Address Strobe,列地址信号,它定义了在读取命令发出后到数据读出到IO接口的间隔时间。
sdc 约束 expr 语法
sdc 约束(Synopsys Design Constr本人nts)是一种人工编写的描述,是一种描述设计的物理要求或资源的语言,这些约束用于约束综合工具在设计布局中的流程。
而 expr 则是一种自动化的约束生成器,它可以使用提供的设计信息来生成 sdc 约束,并为设计流程提供更多的灵活性和自动化。
在使用 sdc 约束时,我们需要遵循一定的语法规则,这些规则主要包括以下几个方面:1. 时序约束语法时序约束定义了逻辑门延迟和时钟约束。
在 sdc 约束中,我们可以通过定义时钟分频、时钟延时、时钟起始时间等参数来描述时序约束。
例如:``` verilogcreate_clock -name clk -period 10 [get_ports clk]```这个例子中,我们定义了一个名为 "clk" 的时钟,其时钟周期为 10 个时间单位。
2. 穿越约束语法穿越约束描述了信号从一个时钟域到另一个时钟域的时序要求。
在sdc 约束中,我们可以使用 set_clock_groups 来定义穿越约束。
例如:``` verilogset_clock_groups -group {clk1} -group {clk2} -asynchronous```这个例子中,我们定义了时钟域 "clk1" 与时钟域 "clk2" 之间的穿越约束为异步穿越。
3. IO 约束语法IO 约束描述了设计中输入输出端口的时序和电气特性要求。
在 sdc 约束中,我们可以使用 set_input_delay 和 set_output_delay 来定义输入输出端口的时序要求。
例如:``` verilogset_input_delay -clock clk -max 2 [get_ports a]`````` verilogset_output_delay -clock clk -min 1 [get_ports b]```这个例子中,我们分别定义了端口 "a" 的最大输入延迟为 2 个时间单位,以及端口 "b" 的最小输出延迟为 1 个时间单位。
fpga的系统时钟和伴随时钟的关系
fpga的系统时钟和伴随时钟的关系FPGA是一种可编程逻辑器件,可以用于实现各种数字电路。
FPGA中的系统时钟和伴随时钟之间存在一定的关系,本文将从以下几个方面来介绍这种关系。
一、系统时钟和伴随时钟的定义和功能系统时钟是FPGA系统中的主时钟,它是FPGA中所有逻辑电路的控制时钟,用于同步各个时序电路,是实现FPGA功能的基础。
系统时钟的频率在设计时是确定的,它决定了FPGA的整体性能。
系统时钟的频率越高,FPGA的工作速度越快。
伴随时钟是指在FPGA系统中,除了系统时钟以外的其他时钟信号。
它们与系统时钟相对独立,可以有不同的频率,用于实现特定的功能。
例如,控制外设接口、驱动显示屏幕或音频设备等。
伴随时钟的频率可以是系统时钟的整数倍,也可以是系统时钟的分频。
二、系统时钟和伴随时钟的关系1.时钟域划分在FPGA设计中,通常会将各个时钟信号划分为不同的时钟域。
时钟域是指在一个时钟周期内保持同步的逻辑电路集合。
每个时钟域都有一个相应的时钟信号,该时钟信号的频率决定了该时钟域的工作速度。
系统时钟是全局时钟,它驱动着整个FPGA系统的运行。
伴随时钟属于局部时钟,它仅仅影响特定的逻辑电路。
2.时钟互联在FPGA设计中,涉及到多个时钟域时,需要进行时钟互联来保持时钟同步。
时钟互联可以通过专用的时钟信号处理电路来实现。
常用的时钟信号处理电路有时钟互联器、时钟握手电路等。
时钟互联的主要目的是解决不同时钟域之间的时序问题。
当两个时钟域的时钟频率不同或存在相位差时,需要进行时钟互联,以确保逻辑电路的正确工作。
三、系统时钟和伴随时钟的设计考虑因素在设计FPGA时,系统时钟和伴随时钟的选择和设计是非常重要的。
以下是一些常见的考虑因素:1.频率和时延系统时钟的频率和伴随时钟的频率需要根据具体的应用需求来确定。
频率过高可能会导致功耗过大,频率过低可能会影响系统的性能。
同时,时钟的延迟也需要考虑,因为较长的时钟延迟会影响电路的响应速度。
sdc 约束时钟和数据之间的相位关系

sdc 约束时钟和数据之间的相位关系SDC (时序约束文件)是一种用于定义和约束时钟和数据之间相位关系的重要文件。
在数字电路设计中,时钟信号被用于同步数字操作,并确保各个部分在正确的时间点进行处理。
时钟信号和数据之间的相位关系对于设计的正确功能和性能至关重要。
SDC文件的编写和使用是确保设计满足时序要求的重要环节。
时钟和数据相位关系是指时钟边沿和数据出现之间的时间差。
时钟边沿通常被定义为设计中的重要时间节点,数据则在此时间节点到达以实现正确的数据同步。
相位关系的正确设置可以确保时钟在足够时间后稳定,以正确地采样数据值。
此外,还需要考虑信号延迟、时钟频率、时钟分配等因素。
在编写SDC文件时,需要定义以下内容来约束时钟和数据之间的相位关系:1.时钟约束:明确指定时钟频率和时钟边沿类型(上升沿或下降沿)。
时钟频率定义了时钟信号的周期,而时钟边沿类型决定了什么时候数据被采样。
2.输入延迟约束:每个输入信号的延迟需要根据时钟频率和数据到达的时间点进行建模。
输入延迟定义了数据从输入端到达时钟边沿的时间。
3.输出延迟约束:每个输出信号的延迟需要根据时钟频率和数据发送的时间点进行建模。
输出延迟定义了数据在时钟边沿后多久从输出端传递出去。
4.约束关系:SDC文件中可以定义时钟和数据之间的约束关系,如数据相对于时钟的建模关系、数据到达时钟边沿的时间关系等。
编写SDC文件需要精确的时序信息,以确保设计满足时序要求。
例如,在高速通信中,必须保证数据在特定时钟边沿之前到达,否则可能导致数据错误。
此外,还需要考虑时钟抖动、时钟分配不均匀等因素,以确定适当的时钟和数据相位关系。
编写SDC文件时需要具备一定的时序分析和信号技术知识。
使用工具如PrimeTime等,可以验证设计是否满足时序要求。
总之,SDC文件是设计中约束时钟和数据相位关系的重要文件。
它定义了时钟边沿和数据到达之间的时间关系,确保设计满足时序要求。
正确编写和使用SDC文件可以提高设计的稳定性和性能,减少时序失效的可能性。
systemverilog的timescale作用域_概述及解释说明

systemverilog的timescale作用域概述及解释说明1. 引言1.1 概述Timescale是SystemVerilog中一个重要的概念,它用来定义模拟仿真的时间单位和精度。
在SystemVerilog设计中,通过设置合适的timescale可以控制仿真过程中的时间分辨率,从而影响到模块之间的时序关系。
本文将详细介绍timescale作用域以及它在SystemVerilog设计和仿真过程中的重要性。
1.2 文章结构本文共分为五个部分进行讨论。
首先,在引言部分对本文的主题进行了简单概述,并介绍了文章所包含的结构内容。
其次,第二部分将详细介绍SystemVerilog 的timescale作用域,包括timescale的定义和作用,以及其使用方式和对代码行为的影响。
第三部分将阐述timescale作用域与模块层次之间的关系,包括规则、应用示例和局部timescale的使用方法。
接下来,在第四部分将比较全局timescale和局部timescale之间存在的区别,并探讨它们在不同场景下的应用场景。
最后,在结论部分对整篇文章进行总结,并提供正确理解和配置timescale 作用域时应注意的指南。
1.3 目的本文旨在深入探讨SystemVerilog的timescale作用域,并对其在设计和仿真过程中的重要性进行全面而深入的分析。
通过本文,读者可以了解timescale是如何定义和应用的,以及它对于模块之间时序关系的影响。
文章还将比较全局timescale和局部timescale之间的区别,并提供适用于不同应用场景下正确理解和配置timescale作用域的建议。
通过理解和掌握timescale作用域,读者可以更好地设计、开发和调试SystemVerilog代码,提高设计效率并降低错误发生的概率。
2. SystemVerilog的timescale作用域2.1 Timescale的定义和作用Timescale是SystemVerilog中一种用于控制时间单位和时间精度的机制。
idelayctrl原语使用说明
idelayctrl原语使用说明idelayctrl是一种用于时序逻辑设计的原语,它在FPGA(现场可编程门阵列)和ASIC(应用特定集成电路)设计中起到关键作用。
本文将深入探讨idelayctrl原语的使用说明,为读者提供全面的了解和应用指导。
一、idelayctrl原语的概述idelayctrl原语是时序逻辑设计中常用的一种IP核,用于控制时钟延迟。
它能够根据设计需要对时钟信号进行精确的延迟调节,以实现对设计电路的优化和性能提升。
idelayctrl原语通常由时钟延迟控制器、时钟延迟线和配置接口等组成,在设计中起到非常关键的作用。
二、idelayctrl原语的使用方法1. 引入idelayctrl原语在设计中引入idelayctrl原语需要在代码中添加相应的引用语句,确保能够正确识别和使用该原语。
一般情况下,设计工具会提供相应的文档和示例代码,供设计人员参考和使用。
2. 实例化idelayctrl原语在设计中实例化idelayctrl原语需要根据设计要求对其进行参数配置。
常见的参数包括时钟延迟范围、延迟步长、延迟精度等。
设计人员可以根据具体需求进行参数配置,以满足设计要求。
3. 连接idelayctrl原语在设计中连接idelayctrl原语需要将时钟信号和待延迟的信号与idelayctrl原语进行正确的连接。
一般情况下,时钟信号需要连接到idelayctrl原语的时钟输入端口,待延迟的信号需要连接到idelayctrl原语的数据输入端口。
通过正确的连接,idelayctrl原语能够准确地对待延迟的信号进行控制。
4. 配置idelayctrl原语在设计中配置idelayctrl原语需要根据设计要求对其进行参数配置。
常见的配置包括时钟延迟范围、延迟步长、延迟精度等。
设计人员可以通过设计工具提供的界面或命令进行参数配置,以满足设计要求。
5. 生成bitstream文件在设计中生成bitstream文件需要将设计代码综合成电路网表,并进行布局布线和时序优化,最终生成bitstream文件。
时钟的抖动测量与分析
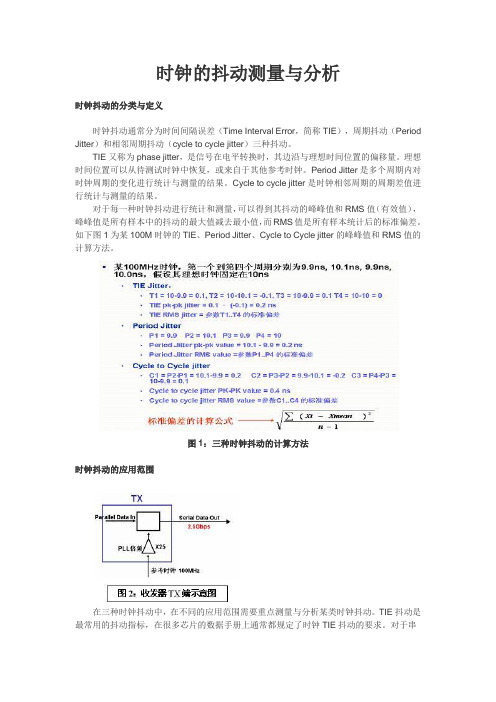
时钟的抖动测量与分析时钟抖动的分类与定义时钟抖动通常分为时间间隔误差(Time Interval Error,简称TIE),周期抖动(Period Jitter)和相邻周期抖动(cycle to cycle jitter)三种抖动。
TIE又称为phase jitter,是信号在电平转换时,其边沿与理想时间位置的偏移量。
理想时间位置可以从待测试时钟中恢复,或来自于其他参考时钟。
Period Jitter是多个周期内对时钟周期的变化进行统计与测量的结果。
Cycle to cycle jitter是时钟相邻周期的周期差值进行统计与测量的结果。
对于每一种时钟抖动进行统计和测量,可以得到其抖动的峰峰值和RMS值(有效值),峰峰值是所有样本中的抖动的最大值减去最小值,而RMS值是所有样本统计后的标准偏差。
如下图1为某100M时钟的TIE、Period Jitter、Cycle to Cycle jitter的峰峰值和RMS值的计算方法。
图1:三种时钟抖动的计算方法时钟抖动的应用范围在三种时钟抖动中,在不同的应用范围需要重点测量与分析某类时钟抖动。
TIE抖动是最常用的抖动指标,在很多芯片的数据手册上通常都规定了时钟TIE抖动的要求。
对于串行收发器的参考时钟,通常测量其TIE抖动。
如下图2所示,在2.5Gbps的串行收发器芯片的发送端,参考时钟为100MHz,锁相环25倍频到2.5GHz后,为Serializer(并行转串行电路)提供时钟。
当参考时钟抖动减小时,TX输出的串行数据的抖动随之减小,因此,需要测量该参考时钟的TIE抖动。
另外,用于射频电路的时钟通常也需测量其TIE抖动(相位抖动)。
在并行总线系统中,通常重点关注period jitter和cycle to cycle jitter。
比如在共同时钟总线(common clock bus)中(如图3所示),完整的数据传输需要两个时钟脉冲,第一个脉冲用于把数据锁存到发送芯片的IO Buffer,第二个脉冲将数据锁存到接收芯片中,在一个时钟周期内让数据从发送端传送到接收端,当发送端到接收端传输延迟(flight time)过大时,数据的建立时间不够,传输延迟过小时,数据的保持时间不够;同理,当这一个时钟的周期值偏大时,保持时间不够;周期值偏小时,建立时间不够。
保持和建立时间详解
这几天经常看到有关数字电路中建立时间(setup time)、保持时间(holdup time)以及延迟时间(delay)的讨论。
自己也高不清楚,查了相关的资料,总算了解了一些。
首先:建立时间和保持时间都是器件要求的特性。
其中建立时间是器件输入端在时钟信号有效沿到来前,要求输入信号稳定不变的时间。
保持时间是器件输入端要求输入信号在时钟信号有效沿到来后保持稳定不变的时间。
如果输入信号不满足建立时间和保持时间的要求,就可能导致数据锁存错误。
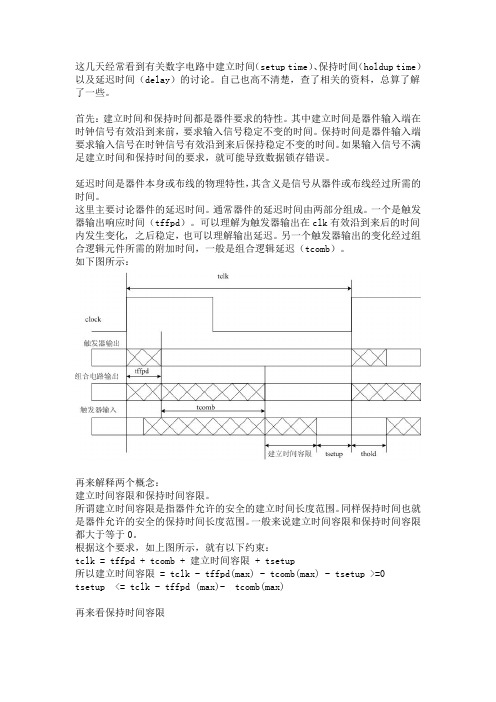
延迟时间是器件本身或布线的物理特性,其含义是信号从器件或布线经过所需的时间。
这里主要讨论器件的延迟时间。
通常器件的延迟时间由两部分组成。
一个是触发器输出响应时间(tffpd)。
可以理解为触发器输出在clk有效沿到来后的时间内发生变化, 之后稳定,也可以理解输出延迟。
另一个触发器输出的变化经过组合逻辑元件所需的附加时间,一般是组合逻辑延迟(tcomb)。
如下图所示:再来解释两个概念:建立时间容限和保持时间容限。
所谓建立时间容限是指器件允许的安全的建立时间长度范围。
同样保持时间也就是器件允许的安全的保持时间长度范围。
一般来说建立时间容限和保持时间容限都大于等于0。
根据这个要求,如上图所示,就有以下约束:tclk = tffpd + tcomb + 建立时间容限 + tsetup所以建立时间容限 = tclk - tffpd(max) - tcomb(max) - tsetup >=0tsetup <= tclk - tffpd (max)- tcomb(max)再来看保持时间容限首先对于数据接收端来说,任何时钟沿采样的数据,都是发送端前一时钟周期发送的数据。
发送端可能每个时钟周期都要发送数据,那么对于接收端来说,任何一个时钟沿后一段时间,数据线上的数据都会被发送端第二次发送的数据改变,所以保持时间容限其实是由于下一个时钟节拍上的数据引起的。
有效数据在tffpd + tcomb之后到达触发器,如果tholdup > tffpd + tcomb,则下一个有效数据到达后,tholdup仍然没结束,但前一个数据已经被破坏,所以必须tholdup <= tffpd + tcomb。
ASIC复习 .doc
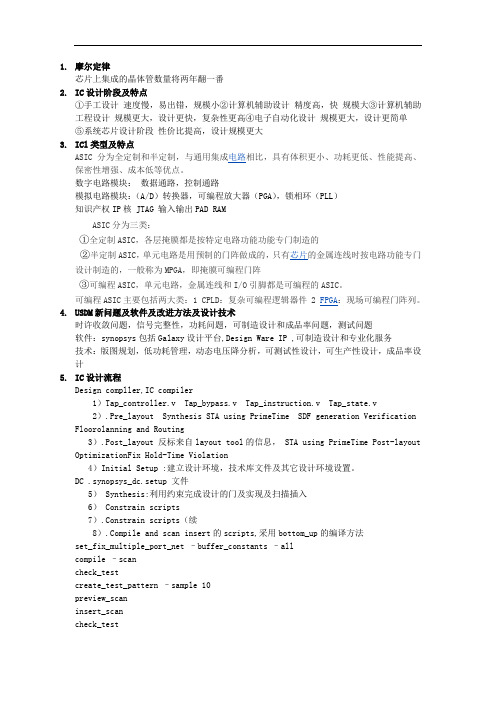
1.摩尔定律芯片上集成的晶体管数量将两年翻一番2.IC设计阶段及特点①手工设计速度慢,易出错,规模小②计算机辅助设计精度高,快规模大③计算机辅助工程设计规模更大,设计更快,复杂性更高④电子自动化设计规模更大,设计更简单⑤系统芯片设计阶段性价比提高,设计规模更大3.ICl类型及特点ASIC分为全定制和半定制,与通用集成电路相比,具有体积更小、功耗更低、性能提高、保密性增强、成本低等优点。
数字电路模块:数据通路,控制通路模拟电路模块:(A/D)转换器,可编程放大器(PGA),锁相环(PLL)知识产权IP核 JTAG 输入输出PAD RAMASIC分为三类:①全定制ASIC,各层掩膜都是按特定电路功能功能专门制造的②半定制ASIC,单元电路是用预制的门阵做成的,只有芯片的金属连线时按电路功能专门设计制造的,一般称为MPGA,即掩膜可编程门阵③可编程ASIC,单元电路,金属连线和I/O引脚都是可编程的ASIC。
可编程ASIC主要包括两大类:1 CPLD:复杂可编程逻辑器件 2 FPGA:现场可编程门阵列。
DM新问题及软件及改进方法及设计技术时许收敛问题,信号完整性,功耗问题,可制造设计和成品率问题,测试问题软件:synopsys包括Galaxy设计平台,Design Ware IP ,可制造设计和专业化服务技术:版图规划,低功耗管理,动态电压降分析,可测试性设计,可生产性设计,成品率设计5.IC设计流程Design compller,IC compiler1)Tap_controller.v Tap_bypass.v Tap_instruction.v Tap_state.v2).Pre_layout Synthesis STA using PrimeTime SDF generation Verification Floorolanning and Routing3).Post_layout 反标来自layout tool的信息, STA using PrimeTime Post-layout OptimizationFix Hold-Time Violation4)Initial Setup :建立设计环境,技术库文件及其它设计环境设置。
verilog延迟格式指南

verilog延迟格式指南Verilog延迟格式指南导言:在数字电路设计中,对于时序相关的电路,准确地定义延迟是非常重要的。
Verilog作为一种硬件描述语言,提供了多种格式来描述延迟。
在本篇文章中,我们将深入探讨Verilog延迟格式的使用,以及它们在电路设计中的应用。
一、Verilog延迟格式简介1.1 时间单位在Verilog中,时间单位是指计算延迟的基本单位。
常见的时间单位包括纳秒(ns)、微秒(us)、毫秒(ms)和秒(s)。
在编写Verilog代码时,我们需要根据实际需求选择合适的时间单位来表示延迟。
1.2 时间精度时间精度用于确定Verilog代码中表示延迟的精度。
它可以是一个固定的值,也可以是由`timescale指令在代码中设置的值。
常见的时间精度包括1纳秒(1ns)、10纳秒(10ns)和100纳秒(100ns)。
选择适当的时间精度可以在保证准确性的前提下,提高代码的可读性和可维护性。
二、Verilog延迟格式的使用方法2.1 形式延迟形式延迟是指在Verilog代码中直接使用固定的时间值来表示延迟。
它可以是一个常数,也可以是一个参数或信号的值。
以下是一些常见的形式延迟的使用示例:- #10 // 延迟10个时间单位- #20us // 延迟20微秒- #(CLK_PERIOD/2) // 延迟信号CLK_PERIOD的一半的时间2.2 变量延迟变量延迟是指在Verilog代码中使用变量来表示延迟。
这种延迟方式更加灵活,可以根据具体情况进行动态调整。
以下是一个使用变量延迟的示例:- #delay // 延迟时间由变量delay决定2.3 步进延迟步进延迟逐渐增加或减少延迟时间,用于模拟一些特定的时序行为。
它可以通过循环结构或条件语句来实现。
以下是一个使用步进延迟的示例:```for (i=0; i<10; i=i+1) begin#i*10;end```上述代码中,延迟时间会从0逐步增加到90,步长为10个时间单位。
vivado差分时钟管脚约束

Vivado差分时钟管脚约束简介Vivado是Xilinx公司推出的一款集成化的设计套件,用于FPGA和SoC设计。
在设计中,时钟约束是非常重要的一步,特别是在差分时钟设计中。
本文将介绍差分时钟的概念、Vivado中的差分时钟约束方法以及一些常见的差分时钟约束实例。
差分时钟概念差分时钟是指由两个相位相反的时钟信号组成的时钟信号。
在FPGA设计中,差分时钟常用于高速接口和数据传输中,以提高抗干扰能力和信号完整性。
差分时钟信号由一个正相位时钟信号(P时钟)和一个反相位时钟信号(N时钟)组成。
这两个时钟信号的频率相同,相位相反,且幅值也相同。
差分时钟信号的传输通过差分对(Differential Pair)来实现,其中P时钟信号和N时钟信号分别传输在差分对的两个导线上。
Vivado中的差分时钟约束在Vivado中,使用XDC(Xilinx Design Constraints)文件来进行时钟约束。
对于差分时钟,我们需要指定差分对的起点和终点,以及时钟频率和时钟延迟等信息。
以下是一些常用的差分时钟约束命令:create_clockcreate_clock -period <时钟周期> -name <时钟名称> [get_pins <差分对起点>]该命令用于定义一个差分时钟。
其中,-period参数指定时钟周期,-name参数指定时钟名称,get_pins参数指定差分对的起点。
set_input_delayset_input_delay -clock <时钟名称> -min <最小延迟> [get_ports <差分对终点>]该命令用于设置差分对的输入延迟。
其中,-clock参数指定时钟名称,-min参数指定最小延迟,get_ports参数指定差分对的终点。
set_output_delayset_output_delay -clock <时钟名称> -max <最大延迟> [get_ports <差分对起点>]该命令用于设置差分对的输出延迟。
dc中关于clock latency的设置 -回复

dc中关于clock latency的设置-回复DC中关于clock latency的设置Clock latency是数据中心中一个重要的参数,它涉及到数据的传输速度、响应时间和性能优化。
在数据中心中,时钟延迟的设置对于网络的稳定性和可靠性至关重要。
在本文中,我们将一步一步地回答关于DC中时钟延迟设置的问题,从而更好地理解和优化时钟延迟。
第一步:了解时钟延迟的概念和作用时钟延迟指的是数据从发出到接收所需的时间差,通常以纳秒来衡量。
在数据中心中,时钟延迟的设置对于网络传输的速度和响应时间有着重要的影响。
通过减小时钟延迟,可以提高数据传输的速率和系统的响应时间,从而优化数据中心的性能和效率。
第二步:确定时钟延迟的目标在设置时钟延迟之前,需要确定具体的目标。
不同的应用场景对于时钟延迟有不同的要求。
例如,在高频交易系统中,时钟延迟必须控制在非常低的范围内,以保证高效的交易速度。
而在某些大规模数据处理系统中,时钟延迟可以适当增加,以换取更高的数据吞吐量。
因此,在设置时钟延迟时,需要根据具体的场景和需求来确定目标值。
第三步:评估当前的时钟延迟在设置时钟延迟之前,需要先评估当前的时钟延迟情况。
可以使用一些性能测试工具来测量时钟延迟,并根据实际的数据来分析性能瓶颈和优化空间。
对于大规模数据中心来说,可以采用分布式测试的方式来评估不同节点之间的时钟延迟,以获取更准确的结果。
第四步:调整时钟延迟的设置根据评估的结果和目标值,可以考虑适当调整时钟延迟的设置。
在数据中心中,有多种方法可以调整时钟延迟,例如优化网络拓扑结构、增加缓存容量、调整路由策略等。
具体的调整方法需要根据实际情况和需求来确定,通常需要结合性能测试和实时监控来进行动态调整。
第五步:监控和优化时钟延迟时钟延迟的设置不是一次性的工作,而是需要持续监控和优化的过程。
数据中心中的网络环境是动态变化的,时钟延迟可能会受到各种因素的影响,例如负载、网络拥堵、硬件故障等。
dc中关于clock latency的设置
DC中关于Clock Latency的设置1. 介绍时钟延迟对于数字电路设计来说是一个非常重要的概念。
在DC综合工具中,时钟延迟的设置可以对数字电路的性能和功耗产生重大影响。
正确地设置时钟延迟可以帮助设计人员优化数字电路的性能和功耗,并确保电路能够按照设计要求正常运行。
2. 时钟延迟的定义时钟延迟是指时钟信号从发出到实际被接收的时间延迟。
在数字电路设计中,时钟延迟直接影响着电路中各个时序元件的工作状态。
时钟延迟主要包括时钟上升沿到达各个时序元件的时间差和各个时序元件的时钟上升沿到输出信号稳定的时间。
3. DC中的时钟延迟设置在DC综合工具中,时钟延迟可以通过设置时钟时序约束来实现。
时钟时序约束包括时钟到达时间(clock arrival time)和时钟延迟时间(clock latency)。
时钟到达时间指的是时钟信号到达时序元件的时间,而时钟延迟时间则是指时钟信号的延迟时间。
4. 时钟延迟的重要性正确地设置时钟延迟对于数字电路设计来说是非常重要的。
在实际应用中,时钟延迟的设置可以影响电路的时序性能、功耗以及时序分析的准确性。
如果时钟延迟设置不当,可能导致电路的工作不稳定,甚至无法满足设计时序要求。
5. 时钟延迟设置的优化策略在DC中,可以通过设置时钟延迟来优化电路的性能和功耗。
一般来说,可以采用以下策略来优化时钟延迟的设置:5.1 根据时序分析结果调整时钟延迟,确保电路的时序性能满足设计要求。
5.2 结合时序优化工具,对时钟延迟进行全局优化,以降低电路的功耗和时序容忍窗口,提高电路的性能。
5.3 对时钟树进行时钟延迟的设置,以确保时钟到达各个时序元件的时间是稳定和一致的。
6. 结语时钟延迟的设置在数字电路设计中起着非常重要的作用。
在DC综合工具中,正确地设置时钟延迟可以帮助设计人员优化数字电路的性能和功耗。
通过合理地设置时钟延迟,可以确保电路能够按照设计要求正常运行,并且在实际应用中取得良好的性能和功耗表现。
fpga基本概念partition

fpga基本概念partitionFPGA(Field-Programmable Gate Array)是一种可编程逻辑器件,可以按照需求配置硬件功能,从而在系统中实现特定的功能。
FPGA的设计包括各种组件的布局和互连,其中,partition(分区)是FPGA设计中的一个重要概念。
本文将介绍FPGA分区的基本概念以及其在FPGA设计中的应用。
分区是指将FPGA的硬件资源划分为逻辑上独立的几个部分。
每个分区可以由一个或多个模块组成,每个模块包含一组逻辑电路和互连资源。
在FPGA设计中,我们一般将设计分为多个分区,每个分区负责实现不同的功能,从而提高设计的模块化和可扩展性。
FPGA分区的基本概念可以通过以下几个方面来理解:1.硬件资源划分:FPGA分区将硬件资源划分为不同的区域。
每个分区可以包含LUT(Look-Up Table)、寄存器、BRAM(Block RAM)以及其它可编程逻辑元素,这些元素可以根据设计的需要进行配置和连接。
2.时钟域划分:FPGA设计中常常涉及到不同的时钟域,每个时钟域的时钟信号有不同的频率和相位。
分区可以划分时钟域,使得不同的时钟域的逻辑电路分开,从而简化时钟域划分和信号处理。
3.时序约束:在FPGA设计中,时序约束是指对于每个时钟域中的逻辑块,定义其与时钟信号之间的延迟等约束条件。
通过合理的分区设计,可以使得时序约束的分析和满足更加容易。
4.逻辑分割:FPGA分区可以将整个设计根据功能进行逻辑分割。
每个分区可以包含一个或多个模块,这些模块实现不同的功能,比如计算、存储、控制等。
逻辑分割可以提高设计的模块化和可维护性。
FPGA分区在FPGA设计中有着重要的应用,下面我们将介绍几个具体的应用场景。
1.多时钟域划分:在一些复杂的FPGA设计中,会涉及到多个时钟域的协同工作。
通过将不同的时钟域划分到不同的分区中,可以更好地解决时钟域交叉问题,减小设计的复杂性。
2.逻辑分组和复用:通过合理的分区设计,可以将具有相似功能的逻辑电路分组到同一个分区中,从而提高逻辑复用率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时钟和延迟
1:周期与最高频率
图1所示电路的最小时钟周期
t CLK= Microt CO+t LOGIC+t NET+Microt SU-t CLK_SKEW
其中,t CLK_SKEW=t CD1-t CD2
➢t CLK 时钟的最小周期
➢Microt CO 寄存器固有的时钟输出延迟
➢t LOGIC 同步元件之间的组合逻辑延迟
➢t NET 线网延迟
➢Microt SU 寄存器固有的时钟建立时间
➢t CLK_SKEW 时钟偏斜
t LOGIC
图1 时钟周期的计算
公式中最小时钟周期的倒数即最高频率,用f MAX表示:
f MAX=1/t CLK
f MAX能综合体现设计的时序性能,是最重要的时序指标之一。
2:时钟建立时间
时钟建立时间(Clock Setup Time)常用t SU表示。
想要正确采样数据,就必须使数据和使能信号在有效时钟沿到达前就准备好。
所谓时钟建立时间就是指时钟到达前,数据和使能信号已经准备好的最小时间间隔。
图2所示电路的t SU为;
t SU= Data Delay-Clock Delay+Microt SU
式中Microt SU指的是触发器内部的固有建立时间,是触发器的国有属性,典型值一般小于1ns。
图2 时钟建立时间
3:时钟保持时间
时钟保持时间(Clock Hold Time)常用t H表示。
时钟的保持时间是指能保证有效时钟沿正确采样数据和使能信号在时钟沿之后的最小稳定时间。
t H= Clock Delay- Data Delay+ Microt H
式中Microt H指的是触发器内部的固有建立时间,是触发器的国有属性,典型值一般小于1ns。
图3 时钟保持时间
4:时钟输出延迟
时钟输出延迟(Clock to Output Delay)常用t CO表示。
它指的是在时钟有效沿到数据有效的最大时间间隔。
t CO= Clock Delay+ Data Delay+ Microt CO
式中Microt CO也是一个寄存器的固有属性,指的是寄存器相应时钟有效沿,将数据送到输出端口的内部延迟参数,典型值一般小于1ns。
图4 时钟输出延迟
5:引脚到引脚的延迟
引脚到引脚的延迟(Pin to Pin Delay)常用t PD表示。
指信号从输入管脚进来,穿过纯组合逻辑,到达输出管脚的延迟。
由于FPGA的布线矩阵长度固定,所以常用最大t PD标志FPGA的速度等级。
6:Slack
Slack是表示设计是否满足时序的一个称谓:正的Slack表示满足时序(时序的余量),负的Slack表示不满足时序(时序的缺量)。
Slack= Required Clock period- Actual Clock Period
Slack= Slack Clock period- Microt CO+ Data Delay+ Microt SU
Slack的计算方法如下图
Slack
Combinatorial
图5 Slack 的计算方法
Slack 的概念中,比较重要的是保持时间Slack (Hold Time Slack ),这个概念主要用于衡量寄存器到寄存器路径上数据稳定采样的最小保持时间是否满足。
如果要稳定采样,数据在目的寄存器上升沿到来后要保持稳定的最小值等于目的寄存器Microt H 时间。
就是当目的寄存器上升沿到来后,数据保持稳定的时间必须大于等于目的寄存器Microt H 时间,否则就不能稳定采样。
造成数据保持时间Slack 为负,即数据保持时间不够的主要原因是数据路径的延迟大于时钟路径的延迟。
7:时钟偏斜
时钟偏斜(Clock
Skew ),指一个同源时钟到达两个不同的寄存器时钟端的时间差别。
造成Clock Skew 的原因主要是两条时钟路径到达同步元件的长度不同,使用全局时钟资源驱动设计中的主要时钟信号,能有效地避免这些时钟信号到达各寄存器时钟端的Skew 。
图6 时钟偏斜。