ADAMS参数化建模及优化设计 2PPT课件
ADAMS参数化建模及优化设计
选择“name_and_position”,弹
出创建刚体对话框,将部件名字
改为.model_1.uca,其余缺省,
点击“OK”
实体名称的创建
Command Navigator→ geometry → create →
shape,双击cylinder,创建
几何实体,在名字框可以改动 几何实体的名称 (一定要将 几何实体创建到它属于的部 件)。
Variable、Real,则创建设计变量.model_1.DV_1,
如图。
同样根据lca_knuckle、tie_knuckle创建设计 变量DV_2、DV_3。
设计变量的修改 在菜单Build中选择Design
Variable、Modify,在对话框,
Units中选择length,Value
test_plane
743.0, 1442.0, 207.0
测试台与转向节铰链联接点
参数化点的创建
通过主工具箱中点快
捷图标创建
通过“Tool”菜单中
的”Command Navigator”
来创建(本例以第二种方 式创建)
菜单命令。随后出现Command Navigator对话框,
找到其中的point,点击前面“+”号展开,在展开后的
万向节的创建 进入Command Navigator对话框,展开constraint、
joint,双击hook。弹出创建对话框,在下拉菜单中选择
Position By Using Markers,通过Marker来为铰定向。 I Marker Name编辑框中右击选择Marker、Create, 弹出创建Marker对话框,先创建属于地面的I Marker,Z 轴为水平方向.改名为“model_1.tierod.MARKER41”,在
ADAMS教程很详细手把手教你学会PPT课件
✓选取旋转点的方法:
▪ 当两个物体选取过后,把光标放在要旋转的圆心附近(一般靠近圆弧处),这时圆心处会有一个白色圆圈 出现。如图1;
▪ 这时点右键,弹出点的列表,在其中选取一个圆心点(后面标注center)。如图2; ▪ 选取点后,如图3显示表示铰链约束添加成功。
✓注意:加铰链约束时视图平面一定要与旋转轴垂直,如下图。
▪ 先选取一个物体,再选取另一个,最后选取固定点。
✓选取物体的方法:
▪ 当光标接近物体时,会有标签显示出该零件的名称,此时点击左键即可选中。 ▪ 当附近物体较多时,在该区域点击右键,会弹出零件列表,在列表中选取即可。 ▪ 如果需要和大地固定,只需要在没有物体的地方点左键就行,大地在列表中不显示。
✓选取固定点的方法:
▪ 对于固定约束来说,固定点位置选在任何地方都可以,建议放在容易识别的地方。
第9页/共28页
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
约束设置
▪ 铰链约束
✓约束需要选取两个物体和一个旋转点: ▪ 先选取一个物体,再选取另一个,最后选取旋转点。
✓选取物体的方法:
▪ 添加接触关系
✓接触参数的设置。
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
碰撞刚度,一般钢与钢碰撞使用默认值,有塑料件参与 设为3800。具体数值可根据实际情况调整。 嵌入深度,根据精度要求可适当改小。 如果需要设置摩擦力,选取此项。
静摩擦系数 动摩擦系数
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
✓设置弹簧参数。在弹簧上点右键,如图选择Modify,弹出弹簧属性对话框。
【Adams应用教程】第10章ADAMS参数化建模及优化设计

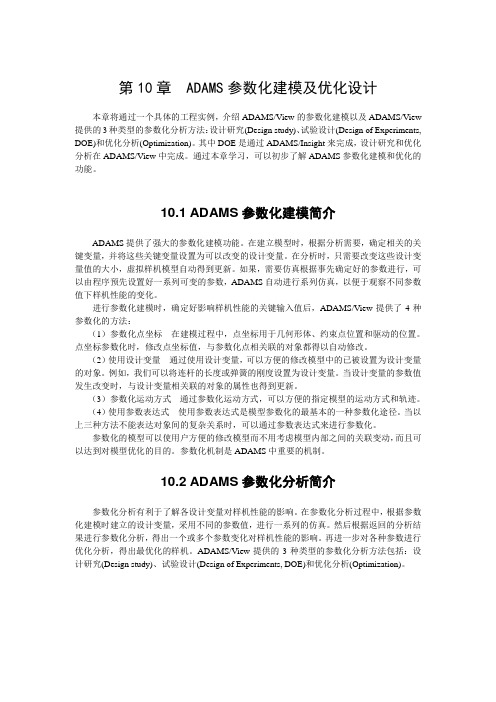
第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。
ADAMS参数化建模及优化设计(doc 35页)

第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。
ADAMS基础培训-实例讲解ppt课件
2.1 创建地块
点击鼠标右键打开工具包 点击Box图标 选择“On Ground ”,使其与大地固结在一起。从 (-2,1,0)单击鼠标,拖到(-18,-1,0)。 对模型进行重命名,Ground_block。
16
2.2 创建In Plane约束
在Build菜单中选择Joints , 点击Inplane图标 ,选 择2 Bod-1Loc,Pick Geometry Feature。 选择地块和钩子,在(-12,1,0)点击左键。 沿着钩子的内侧面将光标上移直到出现向上的箭头, 再点击鼠标左键。
4
一、创建模型
启动ADAMS/view并建立新的数据文件 熟悉界面,设置工作环境 创建设计点(Point) 创建几何模型(曲柄,手柄,连杆,锁钩) 创建约束(铰接)
1.1 建立新模型
启动软件,建立新模型 ,并命名为latch。
重力场设置 单位设置
6
1.2 工作环境设置
设置栏
单位设置
工作格栅设置
ADAMS基础培训 —实例讲解
1
弹簧挂锁模型
设计要求:
• 能产生至少800N的夹紧力。 • 手动夹紧,用力不大于80N。 • 手动松开时做功最少。 • 必须在给定的空间内工作。 • 有震动时,仍能保持可靠夹紧。
ADAMS动画演示
主要内容
一、创建模型 二、测试模型 三、验证测试结果 四、参数化模型 五、最优化设计
1、手柄与曲柄之间的Point_3, 2、手柄与连杆之间的Point_5, 3、连杆与钩子之间的Point_6, 4、钩子与曲柄之间的Point_2。
13
1.9 模型验证
验证模型:
4 移动物体 5 铰接约束 2 自由度
Adams培训PPT幻灯片
二、文件结构及基本操作
2.2标准模式下的菜单基本操作(常用)
显示菜单(View) 常用功能: Assembly—选择当前显示的装配 Subsystem—选择当前显示的子系统 Pre-Set—系统预设的几个观察视角 Position/Orientation—用户自行使用的 视角 Render Mode—线框显示、阴影显示等 注:左侧为显示菜单中内容,右 侧为右键菜单中内容
悬架模板、转向模板、车轮模板、车身模板 制动模板、驱动模板……………
属性文件
属性文件
弹簧属性文件、减振器属性文件、 衬套属性文件、……………
6
二、文件结构及基本操作
2.1整车模型结构
以上各种文件分类存储于数据库分类子库(.tbl)中. 如ubsystems.tbl中,模板 放在templates.tbl中,
网卡物理地址: “开始”菜单→“运行”→“cmd”→“ipconfig/all” 安装过程中可能会提示错误,选择忽略。
3
一、软件的安装及运行
1.2软件的启动
关闭电脑中的360优化大师及安全卫士等其他杀毒软件,其可 能造成软件的突然关闭。
启动安装软件时安装的证书管理器LMTOOLS(每次开机后)
选择“start/stop/reread”标签,选中中间对话框中的“ADAMS”勾选 下面的“force server shutdown”,点击“stop server”
属性文件分类放置,如:弹簧属性文件放在springs.tbl中,减振器 属性文件放在dampers.tbl中……
Adams/acar自带数据库有共享数据库(shared_car_database.cdb)和个 人数据库(private.cdb),用户可根据需要自己添加数据库路径。
ADAMS参数化建模及优化设计解析

实体名称的创建
”Command Navigator>“geometry”->“create” >“shape”,双击“cylinder”创 建几何实体,在名字框可以改 动几何实体的名称 (一定要将 几何实体创建到它属于的部 件)。
Marker的创建
“Center Marker”编辑框中, 右击鼠标选择“Marker” ,在 出现的子菜单中点击 “Create”,弹出创建Marker 的对话框,使用缺省名字。 ”Location“编辑框中,右击 鼠标,选择“Pick Location”, 然后用鼠标在图形区中选择 点“uca_knuckle”,在对话 框的下拉菜单中选择“Along Axis orientation”,选择点 “uca_f_center”,见图10-12。 (表示创建的Marker“Z”轴方 向为点“uca_knuckle”指向 点“uca_f_center”方向,这 指定了所创建圆柱体的轴线 方向)
ADAMS参数化建模及优化设计
华中科技大学CAD中心
参数化的四种方法
参数化点坐标 使用设计变量 参数化运动方式 使用参数表达式
参数化建模应用实例
以双摆臂独立前悬架运动学模型为例 以参数化点坐标的方式进行参数化建模
双摆臂独立前悬架拓扑结构
主要部件:上摆臂 (UCA)、下摆臂 (LCA)、转向节 (Knuckle)、横向拉 杆(Tie Rod)、测试 台(Test Plane)、地 面(Ground)
参数化点的确定
能为模型对象位置和方向定位
根据点能创建模型可视化几何实体
模型的参数化表
序号
名称
1 lca_r_center 2 lca_f_center 3 lca_knuckle 4 uca_r_center 5 uca_f_center 6 uca_knuckle 7 tierod_middle 8 tierod_knuckle 9 hookref 10 knuckle_center 11 wheel_center 12 wheel_outer 13 wheel_inner 14 test_plane
ADAMS参数化建模及优化设计PPT课件

(hook)及Point_2点,完成设置。
2020/1/7
17
添加手柄与摇臂铰链副,选取铰链副后选择摇臂 (pivot)、手柄(handle)及Point_3。
• 添加滑杆与手柄铰链副,选取铰链副后选择滑杆 (slider)、手柄(handle)及Point_5。
鼠标右键,选择part:PART_2,再选择Rename, 输入新名.Latch.pivot
2020/1/7
11
(3)创建手柄(handle)
在工具箱几何建模工具集,选择工具
,依次选取
POINT_3、POINT_4创建手柄。
鼠标右键,选择part:PART_3,再选择Rename,输
入新名.Latch.handle。
鼠标右键,选择Block:BOX_11,再选择Rename, 输入新名.Latch.ground.block。
2020/1/7
16
(7)创建运动副
在A点处将摇臂与基础框架连接。在主工具箱的连接
工具集,,和
选取Point_1点。
添加滑钩与摇臂铰链副。在主工具箱的连接工具集, 选择铰链副,在参数设置栏选择
(1)创建参数点。在工具箱几何建模工具集,选择 Point工具
使用默认设置,如图 所示。根据表的坐标 值,产生A、B、C、D、 E、F6个设计点,如图 所示。
2020/1/7
9
设计点 A B C D E F
变量名 POINT_1 POINT_2 POINT_3 POINT_4 POINT_5 POINT_6
(4)使用参数表达式 使用参数表达式是模型参数化的 最基本的一种参数化途径。当以上三种方法不能表达对象 间的复杂关系时,可以通过参数表达式来进行参数化。
ADAMS参数化建模及优化设计
(8)添加点—面约束副(低副)
➢ 局部放大滑钩,在Build菜单选择Joint,显
示连接对话框,如图9所示。选择工
具
,在参数栏设
置
,
。
依次选取固定支架(ground.block)、滑钩
(hook)、点(-12,1,0),竖直向上拖动
鼠标,按下左键。
共同学习,重在交流
(9)创建弹簧
共同学习,重在交流
设计要求:
➢ 能产生至少800N的 夹紧力。
➢ 手动夹紧,用力不 大于80N。
➢ 手动松开时做功最 少。
➢ 必须在给定的空间 内工作。
➢ 有震动时,仍能保 持可靠夹紧。
共同学习,重在交流
模型建立
➢ 1、启动ADAMS/View
(1)打开ADAMS/View,欢迎对话框中选择 Create a new model项,输入文件名Latch,选
ADAMS参数化建模及优化设计
共同学习,重在交流
参数化的四种方法
➢ 参数化点坐标 ➢ 使用设计变量 ➢ 参数化运动方式 ➢ 使用参数表达式
共同学习,重在交流
➢ (1)参数化点坐标 在建模过程中,点坐标用 于几何形体、约束点位置和驱动的位置。点坐 标参数化时,修改点坐标值,与参数化点相关 联的对象都得以自动修改。
共同学习,重在交流
(7)创建运动副
➢ 在A点处将摇臂与基础框架连接。在主工具
箱的连接工具集,选择铰链 ,在参数设
置栏选择,
,和
添加滑选钩取与P摇oi臂nt铰_1链点副。。在主工具箱的连接工具集,
选择铰链副,在参数设置栏选择
依次选择摇臂(pivot)、滑钩
(hook)及Point_2点,完成设置。
adams基本介绍ppt课件
7.圆角多 边形板
8.拉伸体
16
双击MARKER_1,可在绿框所示栏中进行几何初始位置的修改
12
2.圆柱体 任意建立 圆柱几何 体。
双击PART_2可质量、密度、泊松比、惯性矩、材料等修改。
可进行圆柱长 度、半径的修 改。 通过调整数值 改变几何的平 滑度,数值越 大,圆形越圆。
13
3.球
4.梯台
球体有三个可修改尺寸:X、Y、Z方向的半径,三个 半径相同为球,不同为椭球。
模
ADAMS/Solver有各种建模和求解选项,以便精确有效地解决各种工程问题。 ADAMS/Flex(柔性分析模块)提供ADAMS软件与有限元分析软件之间的双向
块
数据交换接口。利用它与ANSYS、MSC/NASTRAN、ABQUS、I-DEAS等软件的接口,
可以方便地考虑零部件的弹性特性,建立多体动力学模型,以提高系统的仿真精
设置栅格方向,平行于XY 面、YZ面或XZ面。
Rectangular:矩形 坐标系 Polar:极坐标系
工作区域大小的设置 栅格的大小
栅格中圆点及轴 线颜色的设置, 不常用,默认即 可。
7
2.1工作区域
单击工具栏中的 Settings中的Icon Settings,出现图标 设置界面。
可在绿色框中进行 图标尺寸大小的设 置,具体大小自行 设定。
进行栅格背景颜色设置
隐藏或显示栅格
切换几何体表现形式
隐藏或显示图标(如 约束、相对坐标系、 力等符号)
改变工作界面的视图(主、右、俯)
放大:快捷键Z 旋转:快捷键R 平移:快捷键T 适应界面 局部放大:快 捷键W
8
2.2建模选项卡介绍(常用)
ADAMS数据使用介绍精品PPT课件

helix defined by the following equations:
x = cos(alpha)
y = sin(alpha)
z = alpha
Curve Creation Steps
创建曲线单元: 定义矩阵
的数组或系统单元的初始条件,用常数数组或用户子 程序形式表示。
• 状态数组 States (X) • 输出变量数组 Outputs (Y) • 输入变量数组 Inputs (U)
用以定义系统状态方程或传递函数 其中,初始条件和输入数组可单独存在。
建立数组数据单元
输入数组单元名称、选择类型、输入数组元素的 值,检查数组的大小是否正确。
spline样条曲线。
• Control points – 由控制点生成均匀B-spline
样条曲线。
• Subroutine – 编写子程序计算点坐标和导数产生
各种类型的曲线或分析定义的曲线。
参数曲线
• The x, y, and z coordinates of a point on a
parametric curve are functions of anindependent parameter, alpha. As alpha varies from its minimum value to its maximum value, the functions x(alpha), y(alpha), and z(alpha) sweep out points on the curve.
曲线数据单元
• 定义三维参数曲线,用于创建 pin-in-slot or
第10章ADAMS参数化建模及优化设计
第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。
ADAMS使用入门PPT幻灯片

• ADAMS软件由基本模块、扩展模块、接口模块、专业领域模块及工具箱5 类模块组成。用户不仅可以采用通用模块对一般的机械系统进行仿真, 而且可以采用专用模块针对特定工业应用领域的问题进行快速有效的建 模与仿真分析。
• ADAMS/View支持参数化建模,以便能很容易地修改模 型并用于实验研究。
• 用户在仿真过程进行中或者当仿真完成后,都可以观 察主要的数据变化以及模型的运动。这些就像做实际 的物理试验一样。
-Chapter 1:软件简介-
6
ADAMS/Solver : • 一个自动建立并解算用于机械系统运动仿真方程的, 快速、稳定的数值分析工具。
你可以设定工作格点的位 置与设定/自订工作平面
设定位置...
绝对原点 现有的坐标系统
设定坐标平面...
绝对坐标轴向 Pre-defined axes, edges, or face normals Locations of existing CSs or vertices
-Chapter 2:环境介绍-
9模型建构Leabharlann 境欲定义模型建构环境...
设定坐标系统
ADAMS/View 使用 直角坐标 系 你可以设定为 圆柱坐标 或 球坐标 欲设定坐标系统 …
使用 主功能表 Settings | Coordinate System
工作目 录
设定单位
欲设定单位… 使用 主功能表
Settings | Units
设定重力
-Chapter 2:环境介绍-
21
状态栏快捷工具(3)
打开模型信息窗口:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统环境设置
工作平面设置:进入菜单 settings working grid…, 在弹出对话框中选择Gloab XZ在主工具箱,点击视图 设置
单位设置 :菜单Settings— >Units,选择MMKS
消息窗口设置 :菜单View ->Message Window,在 弹出对话框中点击左下角按 钮Setting,选择Error。
万向节的创建
进入“Command Navigator”对话框, 展开“constraint”、“joint”,双击 “hook”。弹出创建对话框,在下拉 菜单中选择“Position By Using Markers”,通过Marker来为铰定向。
I Marker Name编辑框中右击选择 “Marker”、“Create”,弹出创建 Marker对话框,先创建属于地面的I Marker,Z轴为水平方向.改名为 “model_1.tierod.MARKER41”,在 “Location”中选择点tierod_middle, 菜单中选择“Along Axis Orientation”,选择点hookref。点击 “OK”。
在Joint Name中选择测试台上的平 移铰,在自由度类型下拉菜单中选 择“translational”。
点击“OK”。
参数化分析方法
设计研究 试验设计 优化设计
设计研究步骤
定义设计变量 定义测计变量
关闭对话框后回到创建几何实 体对话框,在“Radius”编辑栏 中输入15,点击“OK”,则几 何体创建成功
模型部件列表
模型示意图
约束的创建
进入“Command Navigator”对话框,展开 “constraint”、“joint”, 双击“spherical”。
在弹出对话框的I、J part Name编辑框中分别输入 uca和knuckle,在 “location”编辑框中选择 点uca_knuckle。点击 “ok”完成创建。
参数化点的确定
能为模型对象位置和方向定位
根据点能创建模型可视化几何实体
模型的参数化表
参数化点的创建
通过主工具箱中快捷 图标创建
通过“Tool”菜单中 的”Command Navigator…”来创建 (本例以第二种方式 创建)
菜单命令。随后出现 Command Navigator对话 框,找到其中的point,点击 前面“+”号展开,在展开 后的列表中双击create, 这时系统弹出创建点对话 框
实体名称的创建
”Command Navigator>“geometry”->“create” >“shape”,双击“cylinder”创 建几何实体,在名字框可以改 动几何实体的名称 (一定要将 几何实体创建到它属于的部 件)。
Marker的创建
“Center Marker”编辑框中, 右击鼠标选择“Marker” ,在 出现的子菜单中点击 “Create”,弹出创建Marker 的对话框,使用缺省名字。
并重复上述步骤创建剩下 的点,或者点击Apply,直 接改动名字,输入坐标。 创建完成后,界面上会出 现图标,这表示创建出的 点
部件模型的创建
创建空部件
创建几何实体
空部件的创建(以上摆臂为例)
进入“Command Navigator” 对话框,依次展开“part”、 “create”和“rigid_body”, 选择“name_and_position”, 弹出创建刚体对话框,将部 件名字改为.model_1.uca, 其余缺省,点击“OK”
建横向拉杆上的J Marker,其Z轴为 横向拉杆的轴线方向。Marker对话框 中改名为 “.model_1.tierod.MARKER_42”, 在Location编辑框中选择点 tierod_middle,在菜单中选择 “Along Axis Orientation”,选择点 tierod_middle,点击“OK”。
ADAMS参数化建模及优化设计
CAD中心
参数化的四种方法
参数化点坐标 使用设计变量 参数化运动方式 使用参数表达式
参数化建模应用实例
以双摆臂独立前悬架运动学模型为例 以参数化点坐标的方式进行参数化建模
双摆臂独立前悬架拓扑结构
主要部件:上摆臂 (UCA)、下摆臂 (LCA)、转向节 (Knuckle)、横向拉 杆(Tie Rod)、测试 台(Test Plane)、地 面(Ground)
实体参数的设置
返回创建圆柱体的对话框,在 长度对话框栏右击鼠标,选择 “Parameterize”->“Expression build”,下拉菜单选择“Modeling Function”,选择“DM”,用来 计算两点之间距离。点击按钮 “Assist...”,弹出对话框,在 object1编辑框中输入第一个点 “uca_knuckle”,在object2编 辑框中输入“uca_f_center”见 图
”Location“编辑框中,右击 鼠标,选择“Pick Location”, 然后用鼠标在图形区中选择 点“uca_knuckle”,在对话 框的下拉菜单中选择“Along Axis orientation”,选择点 “uca_f_center”,见图10-12。 (表示创建的Marker“Z”轴方 向为点“uca_knuckle”指向 点“uca_f_center”方向,这 指定了所创建圆柱体的轴线 方向)
回万向节创建对话框,点击“OK完成。
约束列表
创建驱动
在“Command Navigator”>“constraint”->“create”、 “joint”,双击 “motion_generator”。
在“Motion name”改变motion的 名字。在函数类型下拉菜单中选择 “Function”,在编辑框中输入“100*time+100”。在接下来的两个 下拉菜单中分别选择 “displacement”和“Motion On Joint”。