PIC16F877A与PIC16F887的区别2
PIC16F877A功能及其编程
4.1.1 端口A
因此,在使用RA口时,除了要设置TRISA外,有 时相关寄存器也要设置。
注意:在上电复位时,与AN有关的端口的默认 设置是作为模拟端口,即ADCON1(见4.6)中默认 值为0b00xx0000,这个值的设置结果是除RA4外的所 有的RA引脚都作为模拟输入。
信的时钟线; RC7/RX/DT:IO引脚、异步串行通信的接收、同步串行通
信的数据线。
4.1.4 端口D
端口D有8个引脚,它除了作为普通IO口外, 还能作为并行从动口使用。
4.1.5 端口E 端口E只有3个引脚,它们都可以作为AD转换
的模拟电压输入口,功能如下:
RE0/RD/AN5:IO引脚、并行从动口的读控制、 模拟电压输入通道AN5;
➢ 中断的特点:可返回性。中断处理结束后必须能 回到原先的程序,并且能继续运行原先的程序,
这就需要在中断时能进行现场保护与恢复。
中断的执行过程
➢ 中断发生:程序执行到某行,突然事件(能够产 生中断的事件)发生,产生中断。
➢ 断点保护:CPU自动将中断时刻即将要执行的下 一条指令的地址压入堆栈。
➢ 中断响应:CPU自动将PC强制设为0X0004,且GIE =0。执行中断服务程序(自动完成现场保护与恢 复,手动清中断标志位)。
将被调试系统占用,因此在调试时此二个引脚暂 不能使用。
3、8个引脚具有内部弱上拉使能控制 由OPTION_REG寄存器的第7位RBPU控制,如果弱 上拉使能,作为输入的RB口在端口悬空时将被上拉 到高电平。以RB0为例,如下图所示:
4、RB0/INT具有外部中断功能。
5、RB的的高4位还具有电平变化中断功能
ADIE
PIC16F877A定时器的学习
PIC16F877A定时器的学习由于实时数据的仿真需要用到定时器产生数据,今天晚上完成PIC16F877A 产生正弦波形,并将波形数据发送到上位机!这是一个三角波的仿真程序,并通过串口发送到上位机#include #include #include#include “main.h”#include“t232.h”#include“lcd.h”#include“timer.h”//define global variablebank1 uchar flag =0 ;//利用flag 判断中断时间是否到了!bank1 char dat[6] ;bank2 char str[]=“shan dong qing gong ye xue yuan”;bank2 char str1[]=“Starting........”;bank2 char str2[]=“Capturing.......”;bank2 char str3[]=“Stop..........” ;//bank2 float test = 0;//bank2 float t1 ;bank2 uchar t1 =0 ;bank2 uchar t2=0 ;bank1 uchar state = READY ;//当前状态bank1 uchar frame[3] ;//帧缓冲bank1 uchar temp ;//ms 级延时程序void DelayMS(uint ms){ uint i; while(ms--){ for(i=0;i//10us 级延时程序void Delay10US(uint us){ uchar i; for(i=0;iwhile(1) {while((t1>=-20)&&(state==CAPTURE)){t1++ ;sprintf(dat,”(%d)”,t1) ;send_str(dat);if(t1==20)break ;}while((t1}tips:感谢大家的阅读,本文由我司收集整编。
PIC课设指导(内有点阵LCD说明)
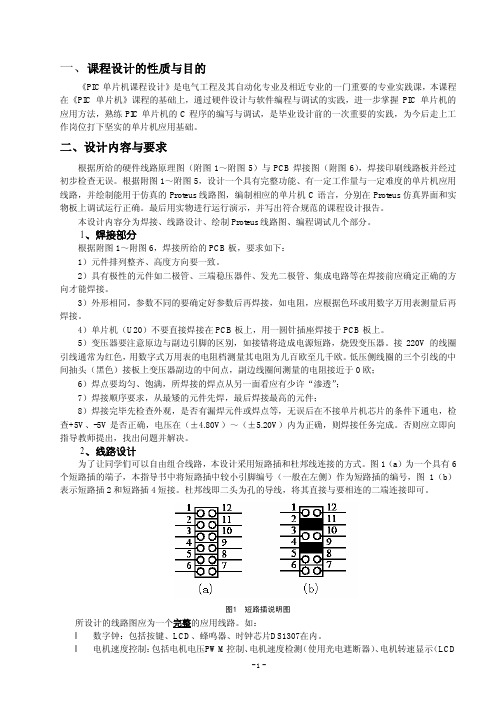
为了让同学们可以自由组合线路,本设计采用短路插和杜邦线连接的方式。图 1(a)为一个具有 6 个短路插的端子,本指导书中将短路插中较小引脚编号(一般在左侧)作为短路插的编号,图 1(b) 表示短路插 2 和短路插 4 短接。杜邦线即二头为孔的导线,将其直接与要相连的二端连接即可。
图1 短路插说明图
本设计内容分为焊接、线路设计、绘制 Proteus 线路图、编程调试几个部分。
1、焊接部分
根据附图 1~附图 6,焊接所给的 PCB 板,要求如下: 1)元件排列整齐、高度方向要一致。 2)具有极性的元件如二极管、三端稳压器件、发光二极管、集成电路等在焊接前应确定正确的方 向才能焊接。 3)外形相同,参数不同的要确定好参数后再焊接,如电阻,应根据色环或用数字万用表测量后再 焊接。 4)单片机(U20)不要直接焊接在 PCB 板上,用一圆针插座焊接于 PCB 板上。 5)变压器要注意原边与副边引脚的区别,如接错将造成电源短路,烧毁变压器。接 220V 的线圈 引线通常为红色,用数字式万用表的电阻档测量其电阻为几百欧至几千欧。低压侧线圈的三个引线的中 间抽头(黑色)接板上变压器副边的中间点,副边线圈间测量的电阻接近于 0 欧; 6)焊点要均匀、饱满,所焊接的焊点从另一面看应有少许“渗透”; 7)焊接顺序要求,从最矮的元件先焊,最后焊接最高的元件; 8)焊接完毕先检查外观,是否有漏焊元件或焊点等,无误后在不接单片机芯片的条件下通电,检 查+5V、-5V 是否正确,电压在(±4.80V)~(±5.20V)内为正确,则焊接任务完成。否则应立即向 指导教师明
6)具有门控功能的定时器 TMR1 887 增加了利用引脚 RB5/T1G 或比较器 C2 的输出作为 TMR1 的门控端,控制 TMR1 计数的功能。 TMR1 的门控端为 RB5/T1G 或比较器 C2。TNR1 默认的门控端为 RB5/T1G,如要使用此引脚作为 TMR1 的门控信号,要把 RB5 设置为 IO 口,并设置为输入。 当 TMR1 门控使能即 TMR1GE=1 时,如果 T1GINV=0,则 T1G=0 时 TMR1 计数,T1G=0 时 TMR1 停止计数。 T1GINV=1 时则相反。 图 11 为与 877A 新增的 T1CON 的 7、6 位说明。
PIC16f877中文资料1
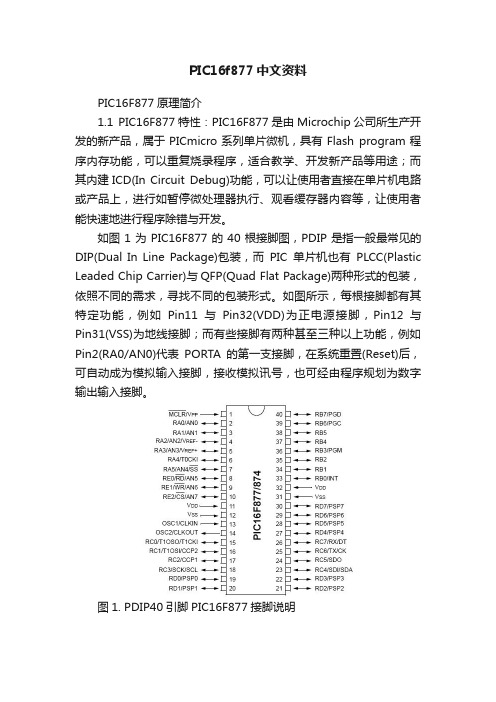
PIC16F877原理简介1.1 PIC16F877特性:PIC16F877是由Microchip公司所生产开发的新产品,属于PICmicro系列单片微机,具有Flash program程序内存功能,可以重复烧录程序,适合教学、开发新产品等用途;而其内建ICD(In Circuit Debug)功能,可以让使用者直接在单片机电路或产品上,进行如暂停微处理器执行、观看缓存器内容等,让使用者能快速地进行程序除错与开发。
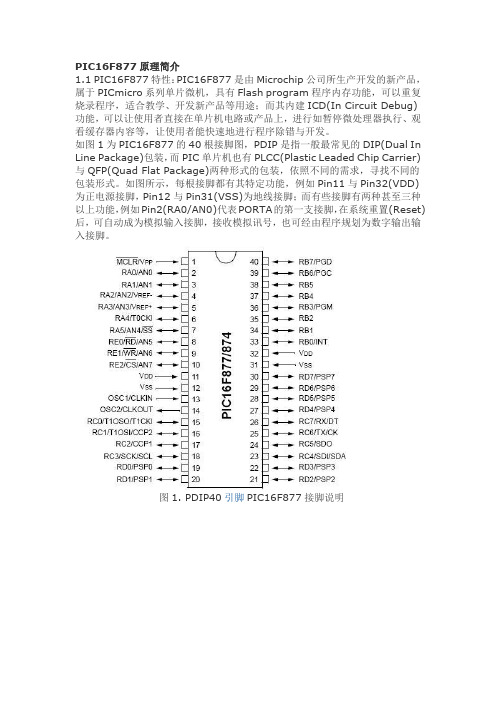
如图1为PIC16F877的40根接脚图,PDIP是指一般最常见的DIP(Dual In Line Package)包装,而PIC单片机也有PLCC(Plastic Leaded Chip Carrier)与QFP(Quad Flat Package)两种形式的包装,依照不同的需求,寻找不同的包装形式。
如图所示,每根接脚都有其特定功能,例如Pin11与Pin32(VDD)为正电源接脚,Pin12与Pin31(VSS)为地线接脚;而有些接脚有两种甚至三种以上功能,例如Pin2(RA0/AN0)代表PORTA的第一支接脚,在系统重置(Reset)后,可自动成为模拟输入接脚,接收模拟讯号,也可经由程序规划为数字输出输入接脚。
图1. PDIP40引脚PIC16F877接脚说明图2. PDIP28和SOIC28引脚PIC16F877接脚图说明图3. PLCC44引脚PIC16F877脚位图说明图4. QFP44引脚PIC16F877引脚图说明PIC16F877属于闪控式(Flash)单片机,可以重复烧录,其ROM的容量总共是8K words,以2K为一个page,区分为4个pages;内部RAM总共有512个字节(00f~1FFh),以128个字节为一个Bank,共区分为4个Bank,如图5所示,每个Bank的前半段都有其特殊用途,分别连接到其特殊功能模块,例如I/O、CCP、Timer、USART、MSSP等。
PIC16f877中文资料
PIC16f877中文资料PIC16F877原理简介1.1 PIC16F877特性:PIC16F877是由Microchip公司所生产开发的新产品,属于PICmicro系列单片微机,具有Flash program程序内存功能,可以重复烧录程序,适合教学、开发新产品等用途;而其内建ICD(In Circuit Debug)功能,可以让使用者直接在单片机电路或产品上,进行如暂停微处理器执行、观看缓存器内容等,让使用者能快速地进行程序除错与开发。
如图1为PIC16F877的40根接脚图,PDIP是指一般最常见的DIP(Dual In Line Package)包装,而PIC单片机也有PLCC(Plastic Leaded Chip Carrier)与QFP(Quad Flat Package)两种形式的包装,依照不同的需求,寻找不同的包装形式。
如图所示,每根接脚都有其特定功能,例如Pin11与Pin32(VDD)为正电源接脚,Pin12与Pin31(VSS)为地线接脚;而有些接脚有两种甚至三种以上功能,例如Pin2(RA0/AN0)代表PORTA的第一支接脚,在系统重置(Reset)后,可自动成为模拟输入接脚,接收模拟讯号,也可经由程序规划为数字输出输入接脚。
图1. PDIP40引脚PIC16F877接脚说明图2. PDIP28和SOIC28引脚PIC16F877接脚图说明图3. PLCC44引脚PIC16F877脚位图说明图4. QFP44引脚PIC16F877引脚图说明PIC16F877属于闪控式(Flash)单片机,可以重复烧录,其ROM 的容量总共是8K words,以2K为一个page,区分为4个pages;内部RAM总共有512个字节(00f~1FFh),以128个字节为一个Bank,共区分为4个Bank,如图5所示,每个Bank的前半段都有其特殊用途,分别连接到其特殊功能模块,例如I/O、CCP、Timer、USART、MSSP等。
第三章 PIC16F887功能及编程

0:计时
01-1:4
… 1111-1:16
1X-1:16
福州大学电气工程与自动化学院
• TMR0是个8位计数/定时器,有可编程预分频率 器,可对外部脉冲计数或对内部指令脉冲计数的 功能。
• 当对外部脉冲计数时,符合一定要求的外部脉冲 送到RA4/T0CKI,且OPTION_REG(<T0CS>)要 置1,且该口(RA4)要设置为输入。
• TMR0寄存器的地址在01H、101H。 • TMR0有溢出中断功能。
中断 信接收 信发送 行通信 模块 溢出 溢出 使能 中断 中断 中断 中断 中断 中断
使能 使能 使能 使能 使能 使能
福州大学电气工程与自动化学院
bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0
- ADIF RCIF TXTF SSPIF CCP1IF TMR2IF TMR1IF - AD转换 串行通 串行通 同步串 CCP1 TMR2 TMR1
• 恢复被保护的相关寄存器 • 程序执行到”RETFIE”时后入先出的原则,从堆栈
中弹出地址给PC,GIE=1,程序返回到中断前 要执行的程序,程序恢复中断前程序的运行状 态。
福州大学电气工程与自动化学院
PIC16F887有17个中断源,每个中断源都有自 己的使能控制位(IE)和中断标志位(IF)。包括:
• 假设当前TRM1H、TMR1L=0x01FF,则在读取TMR1时 就可能发生错误:
• 如先读低字节,得到0xFF,假设此时发生进位,则再读 高字节时得到0x02,总的结果是0x2FF,显然是错误的。
• 如先读高字节,得到0x01,假设此时发生进位,则再读低 字节得到0x00,总的结果是0x100,也是错误的。
第二讲,PIC16F877的硬件系统,20090714
一、PIC16F877核心区域的 核心区域的 部件及其功能
程序存储器:8K*14 flash程序区 PC指针:程序计数器。 硬件堆栈:共有8层,在调用子程序时自动保存 主程序断点处的地址。至于其它的寄存器的内 容则需要用软件编程来保存。 指令寄存器: 暂存从程序存储器中取出的指令,并将指令 分解为操作码和操作数<或者操作数的地址>, 分别送到不同的目的地。
PIC16F877(A)具有8*13的独立堆栈空间, 不占用程序存储器和数据存储器的区域,也 不需要进栈出栈的指令,在调用和返回时自 动实现入口地址的进出栈操作,遵循“后进 先出”的规则。
六、数据存储器
数据存储器的特点
PIC单片机内的数据寄存器分为两种: 一是工作寄存器,只有W寄存器; 一是数据寄存器RAM,又叫文件寄存器,它包 括所有的特殊功能寄存器、通用寄存器以及所有的 输入输出端口。PIC中的RAM除了具备普通RAM可读 可写的功能外,还能实现移位、置位、清位、位测 试等一系列其它单片机中“工作寄存器”的功能。 掉电后,RAM中的内容消失。
RAM数据存储器结构 数据存储器结构
PIC16F877结构 —— 时钟电路
PIC16F877的时钟按提供时钟的速度快慢分成四种模式,模式 的时钟按提供时钟的速度快慢分成四种模式, 的时钟按提供时钟的速度快慢分成四种模式 的选用是由单片机中配置字中FOSC0位和 位和FOSC1位来设定: 位来设定: 的选用是由单片机中配置字中 位和 位来设定 LP模式 模式——低功耗振荡器(Low Power Crystal) 低功耗振荡器( 模式 低功耗振荡器 ) XT模式 模式——标准的振荡器 谐振器(Crystal/Resonator) 标准的振荡器/谐振器 模式 标准的振荡器 谐振器( ) HS模式 模式——高速振荡器 谐振器(High speed 高速振荡器/谐振器 模式 高速振荡器 谐振器( Crystal/Resonator ) RC模式 模式——低成本的电阻器 电容器(Resistor/Capacitor) 低成本的电阻器/电容器 模式 低成本的电阻器 电容器( )
PIC16F877资料
第四章 PIC16F877单片机概述单片机的发展和应用单片机的历史发展概况单片机技术发展十分迅速,产品种类已琳琅满目。
纵横整个单片机技术发展过程,可以分为以下三个主要过程:一、单芯片微机形成过程1976年,Intel公司推出了MCS-48系列单片机。
该系列单片机早期产品在芯片内集成有:8位CPU、1K字节程序存储器(ROM)、64字节数据存储器(RAM)、27根I/O线和1个8位定时/计数器。
此阶段的主要特点是:在单个芯片内完成了CPU、存储器、I/O接口、定时/计数器、中断系统、时钟等部件的集成,但存储器的容量较小,寻址范围小(不大于4K),无串行接口,指令系统功能不强。
二、性能完善提高阶段1980年,Intel公司推出MCS-51系列单片机。
该系列单片机在芯片内集成有:8位CPU、4K字节程序存储器(ROM)、128位字节数据存储器(RAM)、4个8位并行接口、1个全双工串行接口和2个16位定时/计数器。
寻址范围为64K,并集成有控制功能较强的布尔处理器完成处理功能。
此阶段的主要特点是:结构体系完善,性能已大大提高,面向控制的特点进一步突出。
现在,MCS-51已成为公认的单片机经典机种。
三、微控制器化阶段1982年,Intel公司推出MCS-96系列单片机。
该系列单片机在芯片内部集成有:16位CPU、K字节程序存储器(ROM)、232字节数据存储器(RAM)、5个8位并行接口、1个全双工串行接口和2个16位定时/计数器。
寻址范围最大为64K。
片上还有8路10位ADC、1路PWM(D/A)输出及高速I/O部件等。
近年来,许多半导体厂商以MCS-51系列单片机的8051为内核,将许多测控系统中的接口技术、可靠性技术及先进的存储器技术和工艺技术集成到单片机中,生产出了多种功能强大、使用灵活的新一代80C51系列单片机。
此阶段的主要特点是:片内面向测控系统的外围电路增强,使单片机可以方便灵活地应用于复杂的自动测控系统及设备。
PIC16F877A单片机中文文献
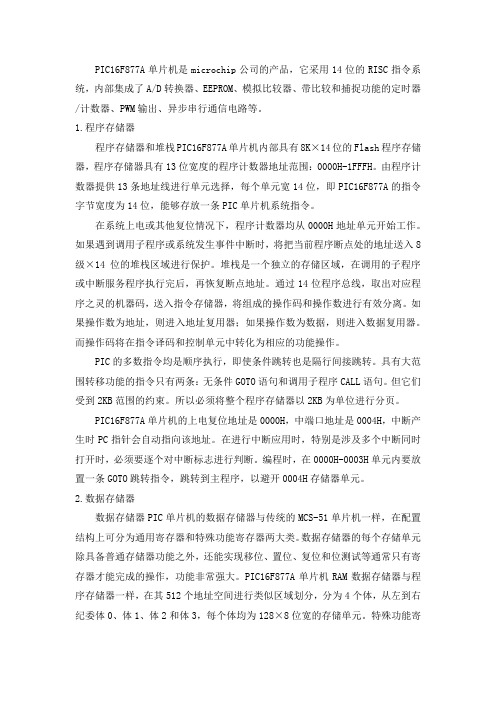
PIC16F877A单片机是microchip公司的产品,它采用14位的RISC指令系统,内部集成了A/D转换器、EEPROM、模拟比较器、带比较和捕捉功能的定时器/计数器、PWM输出、异步串行通信电路等。
1.程序存储器程序存储器和堆栈PIC16F877A单片机内部具有8K×14位的Flash程序存储器,程序存储器具有13位宽度的程序计数器地址范围:0000H-1FFFH。
由程序计数器提供13条地址线进行单元选择,每个单元宽14位,即PIC16F877A的指令字节宽度为14位,能够存放一条PIC单片机系统指令。
在系统上电或其他复位情况下,程序计数器均从0000H地址单元开始工作。
如果遇到调用子程序或系统发生事件中断时,将把当前程序断点处的地址送入8级×14位的堆栈区域进行保护。
堆栈是一个独立的存储区域,在调用的子程序或中断服务程序执行完后,再恢复断点地址。
通过14位程序总线,取出对应程序之灵的机器码,送入指令存储器,将组成的操作码和操作数进行有效分离。
如果操作数为地址,则进入地址复用器;如果操作数为数据,则进入数据复用器。
而操作码将在指令译码和控制单元中转化为相应的功能操作。
PIC的多数指令均是顺序执行,即使条件跳转也是隔行间接跳转。
具有大范围转移功能的指令只有两条:无条件GOTO语句和调用子程序CALL语句。
但它们受到2KB范围的约束。
所以必须将整个程序存储器以2KB为单位进行分页。
PIC16F877A单片机的上电复位地址是0000H,中端口地址是0004H,中断产生时PC指针会自动指向该地址。
在进行中断应用时,特别是涉及多个中断同时打开时,必须要逐个对中断标志进行判断。
编程时,在0000H-0003H单元内要放置一条GOTO跳转指令,跳转到主程序,以避开0004H存储器单元。
2.数据存储器数据存储器PIC单片机的数据存储器与传统的MCS-51单片机一样,在配置结构上可分为通用寄存器和特殊功能寄存器两大类。
PIC16F887系统资源
22
I/O 还可作为从动并行端口PSP实现与
RD4 / PSP4
27
I/O 其他的微处理器总线的连接
RD5 / PSP5
28
I/O
RD6 / PSP6
29
I/O
RD7 / PSP7
30
I/O
2021/3/11
中山火炬职业技术学院
8
引脚名称
PID 类 型
功能说明
端口RE:输入/输出可编程双向3线端口,此外全部引脚都有第2、3功能。
还可做同步/异步收发器USART的全双工 异步接收脚、半双工同步传送的数据
中山火炬职业技术学院
7
引脚名称
PID 类 型
复用功能说明
端口D:输入/输出可编程双向端口,此外全部引脚都有第2功能。
RD0 / PSP0
19
I/O
RD1 / PSP1
20
I/O
RD2 / PSP2
21
I/O
RD3 / PSP3
OSC1/CLKIN 13
I
外接晶体振荡器/外时钟输入
OSC2/CLKOUT 14
O
外接晶体振荡器/时钟输出端
/MCLR V pp
1
I/O 复位端/外加编程+12V电压输入端
端口A(6线):输入/输出可编程双向端口、第2、3 功能。
RA0 / AN0
2
I/O I/O口(下同) / 第0路模拟信号输入
2021/3/11
中山火炬职业技术学院
结构图
18
19.在线调试电路:实现对于焊接在板子上的PIC16F87X芯片的在线调 试。当然,必须使用microchip公司提供的 “MAPLAB — IDE”调试软件的支持。
PIC单片机在线串行编程(ICSP)和低电压编程(LVP)
PIC单片机在线串行编程(ICSP)和低电压编程(LVP)前言:呵呵,不是论文。
刚开始研究PIC,因为想自己做个开发板。
除了如何让板子工作外,如何下程序就最关键了。
所以搜罗了些资料,经过一番研究,终于懂得了一些,拿出来分享一下。
有些前辈们在网上早就写过的资料,摘了一些。
特此感谢啊!副言:因为想做PIC16F877和16F887的板子,所以只对这两个做了研究,但是貌似其他的型号的PIC单片机的在线编程和这个一样!正文:ICSP,全称In-Circuit Serial Programming,在线串行编程。
这行英文和ICSP这四个字母,一般使用时都带有TM标记的,也就是说,这是MICROCHIP的商标。
也是MicroChip 独有的吧。
呵呵!ICSP分高电压在线串行编程(High-voltage In Circuit Serial Programing)和低电压在线串行编程(low-voltage ICSP)两种方法。
低电压编程和高电压编程只是略微有一些不同(详见下文)。
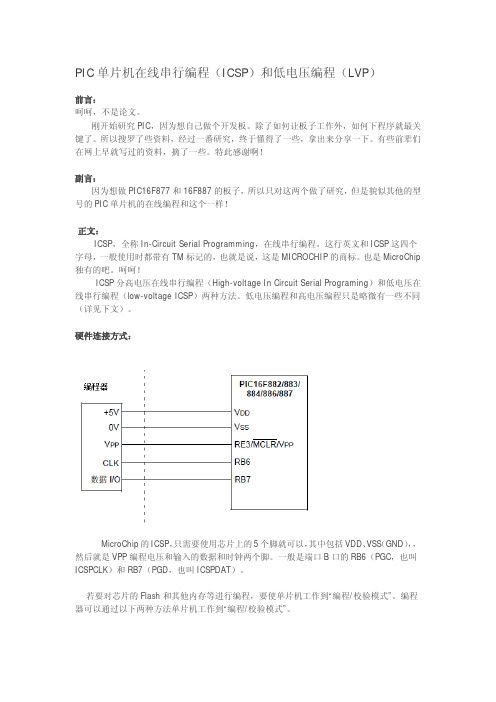
硬件连接方式:MicroChip的ICSP,只需要使用芯片上的5个脚就可以,其中包括VDD、VSS(GND),,然后就是VPP编程电压和输入的数据和时钟两个脚。
一般是端口B口的RB6(PGC,也叫ICSPCLK)和RB7(PGD,也叫ICSPDAT)。
若要对芯片的Flash和其他内存等进行编程,要使单片机工作到“编程/校验模式”。
编程器可以通过以下两种方法单片机工作到“编程/校验模式”。
第一种,VPP优先,时序图如下:说明:首先,保持和为低电平。
在此期间,先将从低电平(VIL)拉高到编程电压(VIHH,大约13V),然后将拉高,为芯片供电。
接下来,就可以通过和对芯片编程了。
不管芯片内的配置字(Configuration Word)如何配置,都可以使单片机工作到“编程校验模式”。
第二种,优先,时序图如下:说明:这种方法在板上已经为芯片提供电源时非常有用。
PIC16F887系统资源
中山火炬职业技术学院
结构图
16.起振延时电路:当芯片上电延时后,该电路再提供一个1024个时钟周 期的延时,以保证振荡器有足够的时间来产生稳定的时钟信号; 17.看门狗定时器WDT:自带RC振荡器时钟源的定时器。用来监视程序 的运行状态。如果因某种原因使程序“脱离了”正常的“轨道” 而 “死机”时,能够强行将CPU复位,使系统从0000开始重新执行程 序。 18.欠压复位电路:当芯片的电源电压低于某个值时,CPU将不能正确的 执行指令,这样系统将会产生不可想象的后果。为了防止这种情况的 发生,PIC内部设立了电源监控电路,一旦电源电压低于某一个值时, 系统将自动产生复位,直到电源Vdd恢复正常后再延时72ms,CPU 才由复位状态转向运行状态。
Vss
Vdd
12,31
11,32
P
P
接地端
正电源端
返回本章目录
中山火炬职业技术学院
课堂练习:
1. 外接编程器的IO口是?
中山火炬职业技术学院
课堂练习:
1. 外部中断输入端口的IO?
中山火炬职业技术学院
课堂练习:
1. 模拟输入端口的IO?
中山火炬职业技术学院
2.2:PIC16F87X内部结构方框图
RB5
RB6 / PGC RB7 / PGD
38
39 40
中山火炬职业技术学院
引脚名称
PID 类型
复用功能说明
端口C:输入/输出可编程双向端口,此外还有第2、3 功能。 RC0/T1OSO/T1CK I RC1/T1OSI/CCP2 RC2/CCP1 RC3/SCK/SCL RC4/SDI/SDA 15 I/O TMR1的震荡输入 / 时钟输出
为了便于分析、理解,可以将PIC16F87X内部结构分为: 内部核心模块、外围模块两个区域。
877A与887的区别
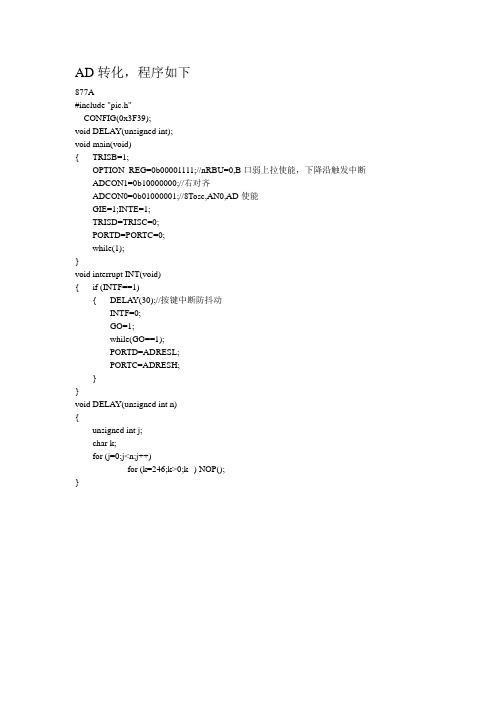
AD转化2
877A
#include "pic.h"
__CONFIG(0x3F39);
unsigned int AD_SUB(unsigned char);
unsigned int AD[3];
void main(void)
{TRISA=0b00001010;
TRISE=0b00000010;
while(1)//AN1,3,6的结果存于AD[]
while(GO==1);
return((ADRESH<<8)+ADRESL);
}
USART实例
#include "pic.h"
__CONFIG(0x3F39);
void interrupt INT(void);
volatile unsigned char X=0x1,Y;
void main(void)
{TRISB=0;
TRISC=0xFF;
GIE=1;PEIE=1;RCIE=1;
SPBRG=25;
TXSTA=0b00100100;
RCSTA=0b10010000;
PORTB=1;
while(1)
{TXREG=X;
while(TRMT==0);
X=X+1;
}
}
void interrupt INT(void)
{AD[0]=AD_SUB(1);
AD[1]=AD_SUB(3);
AD[2]=AD_SUB(6);
};
}
unsigned int AD_SUB(unsigned char k)
{unsigned char i;
ADCON1=0b10000000;
从辩证的角度看生物大分子的机关与性能
从辩证的角度看生物大分子的机关与性能1、相关定义1.1、PIC管脚定义在本课题的研究中,考虑到控制系统的开发周期和可靠性,机器人控制系统的下位机控制器件选用PIC16F877A(图4-4)为核心芯片。
PIC单片机(Peripheral Interface Controller)是由美国Microchip公司推出,是一种用来可开发的去控制外围设备的可编程集成电路(IC),其高速度、低电压、低功耗、大电流LCD驱动能力和低价位OTP技术等都体现出单片机产业的新趋势。
PIC单片机从电脑的外设、家电控制、电讯通信、智能仪器、汽车电子到金融电子各个领域的广泛应用。
PIC16F877A型单片机是一款高性能单片机,在许多领域应用广泛,其具有以下特点:精简指令集技术(Reduced Instruction Set Computer, RISC);哈佛(Harvard)总线结构:程序存储器和数据存储器独立编址,即两者位于不同的物理空间;一次性可编程(OTP)技术;具有20mA的驱动能力;I2C、SPI、USART、USB、CAN接口;采用CMOS结构,功耗低。
1.2、分子生物学定义生物学经历一个漫长的研究过程。
由于生物化学、生物物理学、遗传学、微生物学、细胞生物学,有机化学物理化学的相互渗透,相互促进从而使生物学研究闯入细胞的水平。
直到20世纪中叶,生物学引人了生物大分子为研究目标以后,开始创立独立生物学科——分子生物学。
分子生物学(molecular biology)从分子水平研究生命现象的科学。
它的核心内容是通过生物的物质基础——核酸、蛋白质、酶等生物大分子的结构,功能及其相互作用等运动规律的研究来阐明生命分子基础,从而探索生命的奥秘。
1953年,Watson和Crick共同提出脱氧核糖核酸(DNA)的双螺旋结构模型,为打开遗传信息的复制和转录的秘密奠定了基础,紧接着Crick提出中心法则,明确了遗传信息传递的规律。
基于PIC16F877A智能电子秤的设计
基于PIC16F877A智能电子秤的设计第1章前言11.1 选题的背景和意义11.2 国内外电子秤进展及成果21.3 研究现状41.3.1 阻碍因素31.3.2 产品质量41.3.3 进展方向51.3.4 电子秤的智能化51.4 电子秤设计的任务及要求6第2章系统方案设计与论证82.1 系统方案的设计思路82.2 系统方案设计82.3 系统方案比较与论证92.3.1 单片机的选型92.3.2 称重传感器选型132.3.3 放大部分选型182.3.4 A/D转换器选型192.3.5 显示模块选型222.3.6 键盘输入选型242.3.7 语音芯片选型25第3章系统硬件设计273.1 基于PIC16F877A的主控电路273.1.1 PIC16F877A简介273.1.2 PIC16F877A引脚介绍283.1.3 主控电路设计293.2 称重部分303.2.1 GF-7桥型称重器简介 30 3.2.2 工作原理313.2.3 硬件电路313.3 测身高部分323.3.1 超声波测距原理32 3.3.2 测身高硬件电路设计32 3.4 显示部分343.5 语音播报部分363.6 键盘部分373.7 报警电路373.8 电源电路383.9 硬件低功耗设计 383.9.1 低功耗元器件选择38 3.9.2 低功耗电路设计39第4章软件设计414.1 称重部分软件设计41 4.2 测身高部分软件设计43第5章结论47致谢49参考文献 51第1章前言目前,随着社会的进展、生活水平持续提升,人们越来越关注自己的躯体健康。
许多人由于工作的压力和不良的饮食习惯,使得躯体健康每况愈下,疾病也随之而来,而在这些人群中,患有肥胖和营养不良的病人居多。
为方便人们及时了解自己的体重是否超出或低于标准的体重,在许多公共场合都摆放了人体秤,商场、药店、马路旁等随处可见,给那些由于工作紧张没有时刻到医院做定期体验的人们带来了方便。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、其他差异 还有一些差异,请参阅P222~241的4.15节。
四、其他差异
配置位的差别: 增加了一个配置字,用C编写时用连续的二个定义 语句。如: __CONFIG(0x20F1); __CONFIG(0x3FFF); 其含义请在MPLAB IDE中查看。
增加波特率控制寄存器BAUDCTL(参见表4-46), 当BAUDCTL.BRG16=0,选8位波特率因子,即可沿用 877A的程序。
特别注意: 在MPLAB IDE中要选887, 在PROTEUS仿真中的设置—CHIP=16F887 … 在PICC9.8中,887的有些位名与877A不同
2、电平变化中断
877A:B口的高4位才有电平变化中断功能,捆绑式设置 887:B口的所有引脚都有电平变化中断功能,单独设置
IOCB相应位为1时,该引脚允许电平变化中断,0则为禁止。 只有RBIE=1的前提下,才能单独设置RB引脚电平中断的允 许或禁止。 和877A一样,只有设置为输入的数字引脚才能有电平变化 中断的功能。
RB0-AN12 RB1-AN10 RB2-AN8 RB3-AN9 RB4-AN11 RB5-AN13
新增了ANSEL和ANSELH寄存器,用来对AN0-AN13 进行设置,使得对于标有ANx的引脚可以绝对自由地设 置为模拟脚或数字脚,而不象877A那样的混乱! (877A的ADCON1)。在这二个寄存器中,对应的位 为0为数字口,1为模拟口,默认为模拟口!
三、端口的差别
A口:增加RA6/OSC2/CLKOUT和RA7/OSC1/CLKIN
B口:①RB0~RB5对应AN8~AN13 ②能独立设置8个引脚的弱上拉使能 ③能独立设置8个引脚电平变化中断使能 ④RB5增加T1G功能
C口:RC2增加P1A功能
D口: ① RD5~RD7增加P1B~P1D功能 ②D口不再做为并行从动口
PIC16F877A与PIC16F887的区别
4.15 PIC16F887和877A的不同点
887和877A的引脚数量及编号完全相同! 只不过某些引脚的复用功能变动了而已!
887与877A的差异是为了使用更灵活,自 然也要增加一些寄存器。
一. AD区别
AD由原来的8路 → 增为14路: 除了原来的RA0~RA3,RA5,RE0-RE2的8个外,增加 了6路(RB0-RB5)
四、其他差异
看门狗:增加WDTCON寄存器,使得WDT溢出时 间的范围更大,为1ms~270s。
计算溢出时间: T=OPTION分频比*WDTCON分频比*周期32.26us
四、其他差异
门控TMR1:指TMR1只有当某指定引脚 (RB5/T1G)的输出值满足要求时,才能进行计数。
T1CON增加两有效位(位7位6,参见表4-34), 当T1CON.TMR1GE=0时,关闭门控功能,即TMR1始 终工作(与877A相同)。
ADCON1的功能变化也很大!原来引脚配置混乱的 情况由于新增的ANSEL和ANSELH,ADCON1就变得 简单了!
bit 5 VCFG1:参考电压位 1 = VREF- 引脚 0 = VSS
bit 4 VCFG0:参考电压位 1 = VREF+ 引脚 0 = VDD
二.B口的差别
除了RB0~RB5这6个引脚也可做为AD转换口外, B口的弱上拉功能、电平变化功能也有了较大的变 化。
877A的B口弱上拉是死板的,要么都弱上拉,要 么都不上拉。887可以灵活地设置,哪个要或不 要弱上拉都可以自由设置。
1、弱上拉设置
新增了弱上拉寄存器WPUB,每一位对应RB的 每一引脚,位值为1表示允许该位弱上拉,0为禁止 弱上拉。
前提:B口设置为输入,且OPTION_REG的位7 (RBPU)为0,若RBPU=1,则禁止全部弱上拉。
四Байду номын сангаас其他差异
增强型ECCP: 只有CCP1的PWM模式增加了新功能,能在最多 4个引脚(P1A~P1D)上产生要求的PWM信号输出, 其余部分与877A相同。
四、其他差异
增强型异步串行通信: 波特率因子用了双字节,由原来的SPBRG,增加 了一个SPBRGH,波特率的计算误差就更小了,能得 到更高精度的参数。
因此,凡涉及到有ANx的引脚,不管你用不用模拟功 能,都要对ANSEL和ANSELH进行设置!!!
ADCON0寄存器的位有了变动,原来的位5-3位为通 道,现改为位5-2为通道.
CHS<3:0>:模拟通道选择位 0000 = AN0, 0001 = AN1, 0010 = AN2, 0011 = AN3 0100 = AN4, 0101 = AN5, 0110 = AN6, 0111 = AN7 1000 = AN8, 1001 = AN9, 1010 = AN10, 1011 = AN11 1100 = AN12, 1101 = AN13, 1110 = CVREF(可编程的电压输出) 1111 = 固定参考电压 (0.6V 固定参考电压)