Linearizing superon-graviton model(SGM)
Power Circuit and Motor-mounted Apparatus Certifie

Power Circuit and Motor-mounted Apparatus Certified for CanadaAccessories, "Inrush Limiter SITOP Series", Model(s) 6EP1967-2AA00 Accessories , Model(s) 6EP4134-3AB00-0AY0, 6EP4134-3AB00-1AY0, 6EP4134-3AB00-2AY0, 6EP4136-3AB00-0AY0, 6EP4136-3AB00-1AY0, 6EP4136-3AB00-2AY0, 6EP4137-3AB00-0AY0, 6EP4137-3AB00-1AY0, 6EP4137-3AB00-2AY0Industrial control equipment, miscellaneous apparatus , Model(s) 6EP1333-1AL12, 6EP1333-3BA00, 6EP1333-3BA00-8AC0, 6EP1334-1AL12, 6EP1334-3BA00, 6EP1334-3BA00-8AB0, 6EP1336-2BA10, 6EP1336-3BA00, 6EP1336-3BA00-8AA0, 6EP1336-3BA10, 6EP1337-3BA00, 6EP1424-3BA00, 6EP1433-0AA00, 6EP1434-2BA10, 6EP1436-2BA10, 6EP1436-3BA00, 6EP1436-3BA00-8AA0, 6EP1436-3BA01, 6EP1436-3BA10, 6EP1437-2BA20, 6EP1437-3BA00, 6EP1437-3BA00-0AA0, 6EP1437-3BA00-8AA0, 6EP1437-3BA10, 6EP1437-3BA20, 6EP1456-2BA00, 6EP1456-3BA00, 6EP1457-3BA00, 6EP1457-3BA00-0AA0, 6EP1961-3BA01, 6EP1962-2BA00, 6EP1964-2BA00Industrial control equipment, miscellaneous apparatus, current monitors , Model(s) 6EP1961-2BA00Industrial control equipment, miscellaneous apparatus, hold-up modules , Model(s) 6EP1961-3BA00Industrial control equipment, miscellaneous apparatus, redundance modules , Model(s) 6EP1961-3BA20, 6EP1961-3BA21Industrial control equipment, miscellaneous apparatus, signaling modules , Model(s) 6EP1961-3BA10Miscellaneous apparatus, power supplies, open type , Model(s) 6EP1311-1SH02, 6EP1311-1SH03, 6EP1311-1SH12, 6EP1311-1SH13, 6EP1321-1SH02, 6EP1321-1SH03, 6EP1321-5BA00, 6EP1322-1SH02, 6EP1322-1SH03, 6EP1322-5BA10, 6EP1331-1SH02, 6EP1331-1SH03, 6EP1331-5BA00, 6EP1331-5BA10, 6EP1332-1SH04, 6EP1332-1SH42, 6EP1332-1SH43, 6EP1332-1SH51, 6EP1332-1SH52, 6EP1332-1SH61, 6EP1332-1SH71, 6EP1332-5BA00, 6EP1332-5BA10, 6EP1332-5BA20, 6EP1351-1SH02, 6EP1351-1SH03, 6EP1352-1SH02, 6EP1352-1SH03, 6EP1536-3AA00Miscellaneous apparatus, Power Supply Accessories, open type , Model(s) 6EP1931-2DC21, 6EP1931-2DC31, 6EP1931-2DC42, 6EP1931-2EC01, 6EP1931-2EC11, 6EP1931-2EC21, 6EP1931-2EC31, 6EP1931-2EC42, 6EP1931-2FC21, 6EP1931-2FC42, 6EP1933-2EC41, 6EP1933-2EC51, 6EP1935-5PG01Power supplies , Model(s) 6EP1321-1LD00, 6EP1332-1LD00Power supplies, open type, "AS-Interface Series", Model(s) 3RX9501-0BA00, 3RX9501-1BA00, 3RX9501-2BA00, 3RX9502-0BA00, 3RX9503-0BA00, 3RX9511-00AA00, 3RX9512-00AA00, 3RX9513-00AA00Power supplies, open type, "SITOP Series", Model(s) 6EP1322-2BA00, 6EP1322-2BA10, 6EP1323-2BA00, 6EP1332-2BA20, 6EP1333-2AA01, 6EP1333-2AA01-0AA0, 6EP1333-2BA01, 6EP1333-2BA20, 6EP1334-2AA01, 6EP1334-2AA01-0AA0, 6EP1334-2AA01-0AB0, 6EP1334-2AA01-0AC0, 6EP1334-2BA01, 6EP1334-2BA20, 6EP1332-1LB00, 6EP1333-1LB00, 6EP1334-1LB00Switch mode power supplies, open type, "SITOP EVS", Model(s) (SITOP EVP 100)6EP1232-1AA10, (SITOP EVP 150)6EP1233-1AA00, (SITOP EVP 300)6EP1234-1AA00, (SITOP EVP 60)6EP1232-1AA00Switch mode power supplies, open type, "SIYOUNG Power", Model(s) (SIYOUNG Power 100)6EP0123-2AAO-0AB0, (SIYOUNG Power 150)6EP0123-3AAO-0AB0, (SIYOUNG Power 300)6EP0123-4AAO-0AB0, (SIYOUNG Power 60)6EP0123-2AAO-0AA0Switching Power Supplies , Model(s) 6EP1322-1LD00, 6EP1331-1LD00, 6EP1332-1LD10, 6EP1333-1LD00, 6EP1334-1LD00NMTR7.E197259Power Circuit and Motor-mounted Apparatus Certified for CanadaPage BottomSee General Information for Power Circuit and Motor-mounted Apparatus Certified for CanadaSIEMENS AGE197259OESTERREICHSIMEAPOSTFACH 83, SIEMENSSTRASSE 901211 VIENNA, AUSTRIALast Updated on 2013-05-20Questions? Print this page Terms of Use Page Top© 2013 UL LLCWhen the UL Leaf Mark is on the product, or when the word "Environment" is included in the UL Mark, please search the UL Environment database for additional information regarding this product's certification.The appearance of a company's name or product in this database does not in itself assure that products so identified have been manufactured under UL's Follow-Up Service. Only those products bearing the UL Mark should be considered to be Certified and covered under UL's Follow-Up Service. Always look for the Mark on the product.UL permits the reproduction of the material contained in the Online Certification Directory subject to the following conditions: 1. The Guide Information, Assemblies, Constructions, Designs, Systems, and/or Certifications (files) must be presented in their entirety and in a non-misleading manner, without any manipulation of the data (or drawings). 2. The statement "Reprinted from the Online Certifications Directory with permission from UL" must appear adjacent to the extracted material. In addition, the reprinted material must include a copyright notice in the following format: "© 2013 UL LLC".。
惠普彩色激光打印机 Pro M454 和惠普彩色激光多功能一体机 Pro M479 维修手册说明书
Table -1 Revision history Revision number 1
Revision date 6/2019
Revision notes HP LaserJet Pro M454 HP LaserJet Pro MFP M479 Repair manual initial release
Additional service and support for HP internal personnel HP internal personnel, go to one of the following Web-based Interactive Search Engine (WISE) sites: Americas (AMS) – https:///wise/home/ams-enWISE - English – https:///wise/home/ams-esWISE - Spanish – https:///wise/home/ams-ptWISE - Portuguese – https:///wise/home/ams-frWISE - French Asia Pacific / Japan (APJ) ○ https:///wise/home/apj-enWISE - English ○ https:///wise/home/apj-jaWISE - Japanese ○ https:///wise/home/apj-koWISE - Korean ○ https:///wise/home/apj-zh-HansWISE - Chinese (simplified)
Find information about the following topics ● Service manuals ● Service advisories ● Up-to-date control panel message (CPMD) troubleshooting ● Install and configure ● Printer specifications ● Solutions for printer issues and emerging issues ● Remove and replace part instructions and videos ● Warranty and regulatory information
美国造出组合式“变形金刚”
自行 组装 成一个 机器 人 ,朝着 一 力 ,其 中每 一个模 块 还 可单 独 变 个 沙 丘行 进 。抵 达 沙丘 后 ,机 器 成 独 立 的机器 人 ,并 能使 用 红 外
人 突 然 “ 出” 机械 腿 ,爬 上 沙 线和 无 线 电通 讯 设备 ,让 不 同 的 长
丘。 到达 沙 丘顶 部 后 ,变形 机 器 机 器 人 模 块 进 行 “ 话 ” 以对 自 对 ,
器 蛇那 样 滑行 或 横 向移 动 ,甚 至 是否变身以及变成何种形状。翻
64 … …………………………………………
负任 务 的需 要 , 自行 决定 在 何 时 研 究人 员表 示 , 攀 爬 时 , 器 人 在 机
何地变身, 以适 应所 处环 境 。
会 根据 需 要 自动“ ” 长 出腿 。在 下
现 实版 “ 变形 金 刚” 器 人 的 坡 时 ,变形 机 器人 就 会 变身 成球 机 原 型 由 10个 积 木 式 模 块 组 成 。 状 ,顺 着坡 滚 下 去。这 种 机 器 人 0 在 沙 漠 实验 场上 ,这 些模块 能 够 具 有 很 强 的 自我 修 复 和 组 装 能
科 技 博 览
责任 编 辑 : 李正 军
o/ 冬梅 马
美 国 造出组 合式 “ 形金 刚" 变
美 国宇航 局 慢蠕 动 。机 器 人
似“ 变形 金 刚” 的模 块 化可 重构 机 的六个 模块 还 可 组装 成 一条 滚 动 器 人 。这 种机 器 人 能够根 据 所 担 履 带 ,甚 至在 攀 爬 时充 当绳 索 。
人 再 次 变 身 ,成 为 一个 温 室 , 在 身 所处 的环境 进 行评 估 。
沙漠 中保 护 实验 种 子 生长 。
Silicon Sensing Systems DMU30-01 高性能 MEMS 陀螺仪 加速计技
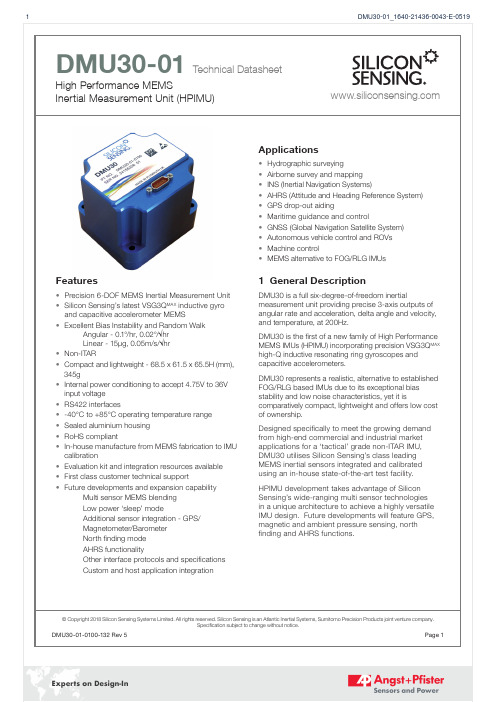
FeaturesPrecision 6-DOF MEMS Inertial Measurement Unit Silicon Sensing’s latest VSG3Q MAX inductive gyroand capacitive accelerometer MEMSExcellent Bias Instability and Random WalkAngular - 0.1°/hr, 0.02°/√hrLinear - 15μg, 0.05m/s/√hrNon-ITARCompact and lightweight - 68.5 x 61.5 x 65.5H (mm), 345gInternal power conditioning to accept 4.75V to 36V input voltageRS422 interfaces-40°C to +85°C operating temperature range Sealed aluminium housingRoHS compliantIn-house manufacture from MEMS fabrication to IMU calibrationEvaluation kit and integration resources availableFirst class customer technical supportFuture developments and expansion capabilityMulti sensor MEMS blendingLow power ‘sleep’ modeAdditional sensor integration - GPS/Magnetometer/BarometerNorth fi nding modeAHRS functionalityOther interface protocols and specifi cationsCustom and host application integrationDMU30-01 IMU DMU30 Evaluation Kit DMU30 Mating ConnectorFigure 5.3 Gyro Scale Factor Errorover TemperatureFigure 5.5 Gyro Max Non-Linearity Error (±490°/s range) over Temperature Figure 5.4 Normalised Gyro Scale Factor Errorover TemperatureFigure 5.6 Gyro Max Non-Linearity Error (±200°/s range) over TemperatureFigure 5.1 Gyro Bias Error (°/h) over Temperature Figure 5.2 Normalised Gyro Bias Error (°/h)over TemperatureFigure 5.11 Accelerometer Scale Factor Error (±1g range) over Temperature(Plymouth g = 9.81058m/s/s)Figure 5.10 Normalised AccelerometerBias Error (mg) over TemperatureFigure 5.12 Normalised Accelerometer Scale Factor Error (±1g range) over TemperatureFigure 5.7 Gyro Noise (°/srms) vs Test Chamber Temperature Figure 5.8 Gyro Misalignments and Crosscoupling (±200°/s range) over Chamber TemperatureFigure 5.15 current Consumption vs Chamber Temperature (12V supply)Figure 5.16 DMU30 Temperature Output Difference (°/C) vs Test Temperature (self heating)Figure 5.17 Gyro Allan Variance Figure 5.14 Accelerometer Misalignments and Crosscoupling over TemperatureFigure 5.18 Gyro In Run StabilityFigure 5.21 Accelerometer Allan Variance Figure 5.23 Accelerometer Spectral DataFigure 5.22 Accelerometer In Run Stability Figure 5.24 Accelerometer Cumulative Noise Figure 5.20 Gyro Cumulative NoiseFigure 5.19 Gyro Spectral DataFigure 8.1 DMU30 Evaluation Kit8.1.1 DMU30 Evaluation Kit ContentsFigure 9.1 DMU30 LabelSER NO. YYWWXXXX CCMADE IN PLYMOUTH UKFigure 11.1 Axis De In order to minimise the requirement for size effectcompensation the accelerometer seismic masses have been located as close as possible to the centre of the DMU30 (the inertial reference point shown in Figure 11.2).61.5 M A X68.5 MAXExperts on Design-Infor sensors and power solutionsScan here and get an overview of personal contacts!We are here for you. Addresses and Contacts.Headquarter Switzerland:Angst+Pfister Sensors and Power AG Thurgauerstrasse 66CH-8050 ZurichPhone +41 44 877 35 00*********************************Office Germany:Angst+Pfister Sensors and Power Deutschland GmbH Edisonstraße 16D-85716 UnterschleißheimPhone +49 89 374 288 87 00************************************。
SMC一触即开阀门配件说明书

Piping for the One-touch fitting•Insert the tube all the way into the fittingso that it cannot be pulled out.•Insertion with excessive force can cause damage.•Ensure there is no leakage after piping.•Use the product within the specified operating pressure and temperature range.TroubleshootingSpecifications / DimensionsRefer to the product catalogue or operation manual from SMC website(URL ) for more information about the product specifications anddimensions.Note: Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.© 2011-2015 SMC Corporation All Rights ReservedAkihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANPhone: +81 3-5207-8249 Fax: +81 3-5298-5362URL Refer to the operation manual from SMC website (URL ) for moreinformation about troubleshooting.Function SettingPress the S buttonfor 2 secondsor longer.Press the S button once in measurement mode.[P_1] or [n_1] and [the current set value] are displayed in turn.in turnS∗: For models with switch outputs for both OUT1 and OUT2, [P_2] or [n_2] will be displayed too.Set as above.∗: If a mode other than Hysteresis Mode is selected, refer to the operation manual from SMC website(URL ) or contact SMC.∗: Note that the set value and hysteresis settings are limited by each other.<Operation>(The illustration shows PFMB7201, when not using the reversed display function.)Press the △or ▽button to change the set value.The △button is to increase and the ▽button is to decrease the set value.Press the△button continuouslyto keep increasing the set value.Press the S button to complete the setting.Return to measurement mode.S∗2: This setting is only available for models with switch outputs for both OUT1 and OUT2.∗3: This setting is only available for models with the external input.∗4: This setting is only available for models with the analogue output.Peak/Bottom value displayThe maximum (minimum) flow from when the power was supplied to this moment isdetected and updated. In peak/bottom display mode, the maximum (minimum) flow isdisplayed•For peak display, when the △button is pressed for 1 second or longer,[the maximum flow] and [Hi] are displayed in turn.To release holding the display of the maximum flow, press the △button for 1 second orlonger again to return to measurement mode.•For bottom display, when the ▽button is pressed for 1 second or longer,[the minimum flow] and [Lo] are displayed in turn.To release holding the display of the minimum flow, press the ▽button for 1 second orlonger again to return to measurement mode.If the △and ▽buttons are pressed simultaneously for 1 second or longer while the flowvalue is being held, the peak (bottom) values are reset.Reset operationThe accumulated flow value can be reset, when displaying the accumlated flow.The reset the accumulated flow, press the △and ▽buttons simultaneously for1 second or longer.The peak/bottom value can be reset, when displaying the peak value (bottom value).To reset the peak/bottom value, press the △and ▽buttons simultaneously for 1 secondor longer.Key lock functionTo use each of these functions, refer to the operation manual from SMC website(URL ) or contact SMC.MaintenanceTo change setting, refer to the operation manual from SMC website(URL ) or contact SMC.12321Safety InstructionsMounting•Never mount the product in a place where it will be used as a mechanical support.•Mount the product so that the fluid flows in the direction indicated by the arrow on the sideof the body.Safety InstructionsMounting and InstallationThese safety instructions are intended to prevent hazardous situations and/orequipment damage.These instructions indicate the level of potential hazard with the labels of"Caution", "Warning" or "Danger". They are all important notes for safety and mustbe followed in addition to International standards (ISO/IEC) and other safetyregulations.InstallationPanel mounting (Only PFMB7201)•Refer to the diagram and table below for mounting details.•Refer to the dimension from SMC website (URL )for panelthickness and panel mount cut-out dimensions.OperatorBodyPFMB7201PFMB7501/7102/7202DisplayPFMB7201PFMB7501/7102/7202Bracket mounting•Refer to the diagram and table below for mounting details.•Refer to the dimension from SMC website (URL )for bracketthickness and mounting hole dimensions.Connecting/Disconnecting•When mounting the connector, insert it straight into the socket, holding the lever andconnector body, and push the connector until the lever hooks into the housing, and locks.+ 2 1-1234Power is supplied∗: The outputs will continue to operate during setting.∗: If a button operation is not performed for 30 seconds during the setting, the display will flash.(This is to prevent the setting from remaining incomplete if, for instance, an operator were to leave during setting)∗: 3 step setting mode and Function selection mode are reflected on each other.Flow Setting (set value only) of OUT1 · OUT2Flow[L/min][H_1]Switch ONSwitch OFFSet value[P_1]Outline of settingsDIN rail mounting (Only PFMB7201)•Refer to the diagram and table below formounting details.3 step setting modeIn this mode, only the set values can be input, in just 3 steps.∗: When the reversed display is used, the function of the△and▽buttons is reversed.Piping•Never mount the product upside down.•The straight piping length shall be 8 cm or longer.Otherwise, if a straight section of piping is not installed, the accuracy varies byapproximately ±2%F.S.•Avoid sudden changes in the piping size on the IN side of the product.•Do not release the OUT side piping port of the product directly to the atmospherewithout the piping connected.If the product is used with the piping port released to atmosphere, the accuracy may vary.Piping for the metal attachment•Tighten to the specified torque. Refer to the table below for the required torque values.•Use a suitable spanner for the appropriate torque. Do not use a spanner 40 cm orlonger.•If the tightening torque is exceeded, the product can be broken.If the tightening torque is insufficient, the fitting may become loose.•Avoid any sealing tape getting inside the flow path.•Ensure there is no leakage after piping.•When mounting the fitting, a spanner should be used on the metal part (attachment) ofthe fitting only.Holding other parts of the product with a spanner may damage the product.Specifically, make sure that the spanner does not damage the connector.Direct mounting•Refer to the diagram and table below for mounting details.•Refer to the dimension from SMC website (URL )for mountinghole size.Thank you for purchasing an SMC PFMB7 series Digital Flow Switch.Please read this manual carefully before operating the product and make sure youunderstand its capabilities and limitations. Please keep this manual handy forfuture reference.Before UseDigital Flow SwitchPFMB7201/7501/7102/7202Connector pin numbers (lead wire)Press the▽button continuouslyto keep decreasing the set value.PF※※-OMP0003-AHow to reset the product after a power cut or when the power has beenunexpectedly removedThe settings of the product are retained from before the power cut orde-energizing.The output condition also recovers to that before power cut or de-energizing, butmay change depending on the operating environment. Therefore, check the safetyof the whole installation before operating the product.settingsdefault settings are shown below.When the flow exceeds the set value [P_1], the switch will be turned ON.When the flow falls below the set value by the amount of hysteresis [H_1] or more, theswitch will turn OFF.If the operation shown in the diagram below is acceptable, then keep these settings.For more detailed settings, set each function in the function selection mode.Default settingsWiringConnection•Connections should only be made with the power supply turned off.•Use a separate route for the product wiring and any power or high voltage wiring.Otherwise, malfunction may result due to noise.•Ensure that the FG terminal is connected to ground when using a commerciallyavailable switch-mode power supply. When a switch-mode power supply is connectedto the product, switching noise will be superimposed and the product specification canno longer be met. This can be prevented by inserting a noise filter, such as a line noisefilter and ferrite core, between the switch-mode power supply and the product or byusing a series power supply instead of a switch-mode power supply.Error indicationNOTEThe direct current power supply used should be UL approved as follows.Circuit (class 2) of maximum 30 Vrms (42.4 V peak) or less, with UL 1310class 2 power supply unit or UL 1585 class 2 transformer.The product is a UL approved product only if it has a mark on the body.Function selection modeIn measurement mode, press the S button for 2 seconds or longer, to display [F 0].The [F] indicates the mode for changing each Function Setting.Press the S button for 2 seconds or longer in function selection mode to return tomeasurement mode.。
Tufin 产品介绍说明书

Follow Tufin on Twitter: @TufinTech Read more on Tufin’s blog: Suite Talk
The Tufin Advantage
Tufin is the Network Security Policy Management (NSPM) Market Leader
2,000+
Global Customers
Over Half
of the Fortune 50
14
Protected Pandable distributed architecture to address large, complex environments.
Proven to work in the world's largest enterprise networks
Elastic distributed architecture with DS and RC no additional license required
Full control on the level of automation (from semi-automated to zero touch) for all workflows
New Einstein-Hilbert Type Action for Unity of Nature

a rXiv:h ep-th/0111283v13N ov21hep-th/SIT-LP-01/10New Einstein-Hilbert Type Action for Unity of Nature ∗Kazunari SHIMA Laboratory of Physics,Saitama Institute of Technology Okabe-machi,Saitama 369-0293,Japan November 2001Abstract A new Einstein-Hilbert(E-H)type (SGM)action is obtained by perform-ing the Einstein gravity analogue geomtrical arguments in high symmetric (SGM)spacetime.All elementary particles except graviton are regarded as the eigenstates of SO(10)super-Poincar´e algebra(SPA)and composed of the fun-damental fermion ”superons”of nonlinear supersymmetry(NL SUSY).Some phenomenological implications and the linearlization of the action are dis-cussed briefly.1IntroductionThe standard model(SM)is established as a unified model for the electroewak in-teraction.Nevertheless,it is very unsatisfactory in many aspects,e.g.it can not explain the particle quantum numbers(Q e,I,Y,color,i.e.1×2×3gauge structure), the three-generations structure and contains more than28arbitrary parameters(in the case of neutrino oscillations)even disregarding the mass generation mechanism for neutrino.The simple and beautiful extension to SU(5)GUT has serious diffi-culties,e.g.the life time of proton,etc and is excluded so far.The SM and GUT equiptted naively with supersymmetry(SUSY)have improved the situations,e.g. the unification of the gauge couplings at about1017,relatively stable proton(now threatened by experiments),etc.,but they posess more than100arbitrary param-eters and less predictive powers.However SUSY[1]is an essential notion to unify various topological and non-topological charges and gives a natural framework to unify spacetime and matter leading to the birth of supergravity(SUGRA).Unfor-tunately the maximally extended SO(8)SUGRA is too small to accommodate all observed particles as elementaryfields.The straightforward extension to SO(N) SUGRA with N>9has a difficulty due to so called the no-go theorem on the mass-less elementary high spin(>2)(gauge)field.The massive high-spin is another. Furthermore,we think that from the viewpoint of simplicity and beauty of nature it is interesting to attempt the accommodation of all observed particles in a single irreducible representation of a certain algebra(group)especially in the case of high symmetric spacetime having a certain boundary(,i.e.a boundary condition)and the dynamics are described by the spontaneous breakdown of the high symmetry of spacetime by itself,which is encoded in the nonliner realization of the geometrical arguments of spacetime.Also the no-go theorem does not exclude the possibility that the fundamental action,if it exists,posesses the high-spin degrees of freedom not as the elementaryfields but as some composite eigenstates of a certain symmetry (algebra)of the fundamental action.In this talk we would like to present a model along this scenario.2Superon-Graviton Model(SGM)-Phenomenolgy-Among all single irreducible representations of all SO(N)extended super-Poincar´e(SP) symmetries,the massless irreducible representations of SO(10)SP algebra(SPA) is the only one that accommodates minimally all observed particles including the graviton[2].10generators Q N(N=1,2,..,10)of SO(10)SPA are the fundamental represemtations of SO(10)internal symmetry and decomposed10+5spect to SU(5)following SO (10)⊃SU (5).For the massless case the little algebra of SO(10)SPA for the supercharges in the light-cone frame P µ=ǫ(1,0,0,1)becomes after a suitable rescaling{Q M α,Q N β}={¯Q M ˙α,¯Q N ˙β}=0,{Q M α,¯Q N ˙β}=δα1δ˙β˙1δMN ,(1)where α,β=1,2and M,N =1,2,...5.By identifying the graviton with the Clifford vacuum |Ω (SO(10)singlet)satisfying Q M α|Ω =0.and performing the ordinary procedures we obtain 2·210dimensional irreducible representation of the little algebra (1)of SO(10)SPA as follows[2]: 1(+3(+1),1202),210(−1(−1),1202),45(−5(−3) + CPT-conjugate,where d and the helicity λ.By noting that the helicities of these states are automatically determined by SO(10)SPA in the light-cone and that Q M 1and ¯Q M ˙1satisfy the algebra of the annihilation and the creation operators for the massless spin 12.Becausethey correspond merely to all possible nontrivial combinations of the multiplications of the spinor charges(i.e.generators)of SO(10)SP algebra(clustering by a universalforce?).Therefore we regard 5∗as a superon -quintet and an antisuperon -quintet .The speculation is dicussed later.To survey the physical implications of superon model for matter we assign tentatively the following SM quantum numbers to superons and adopt the following symbols.10+5,13,−13),(1;1,0)]+[(3;13,1,2,SU (2)of SU(5)GUT and satisfy the Gell-Mann–Nishijima relation.Q e =I z +1U(1)invariant way by eating the lower helicity states corresponding to the super-Higgs mechanism and/or to the diagonlizations of the mass terms of the high-spin fields via[SO(10)SPA upon the Clifford vacuum]→[SU(3)×SU(2)×U(1)]→[SU(3)×U(1)].We have carried out the recombinations of the states and found surprisingly that all the massless states necessary for the SM with three generations of quarks and leotons appear in the surviving massless states(therefore,no ster-ile neutrinos).Among predicted new particles one lepton-type electroweak-doublet (νΓ,Γ−)with spin3×3√√√K0,D0-B0,no CKM-like mixings among the lepton generations,νe←→νµ←→ντtran-sitions beyond SM,strong CP-violation,small Yukawa couplings and noµ−→e+γdespite compositeness,etc.and in(SUSY)GUT,no dangerous diagrams for proton decay(without R-parity by hand),etc.[2][3].SGM may be the most economic one.3Fundamental Action of SGMThe supercharges Q of Volkov-Akulov(V-A)model[4]of the nonlinear SUSY(NL SUSY)is given by the supercurrentsJµ(x)=12.Therefore the fundamental theoryof SGM for spacetime and matter at(above)the Planck scale is SO(10)NL SUSY in the curved spacetime(corresponding to the Clifford vacuum|Ω(±2) ).We ex-tend the arguments of V-A to high symmetric curved SGM spacetime,where NL SUSY SL(2C)degrees of freedom(i.e.the coset space coordinates representing N-G fermions)ψ(x)in addition to Lorentz SO(3,1)coordinates x a are embedded at every curved spacetime point with GL(4R)invariance.By defining a new tetrad w aµ(x), w aµ(x)and a new metric tensor sµν(x)≡w aµ(x)w aν(x)in SGM spacetime we ob-tain the following Einstein-Hilbert(E-H)type Lagrangian as the fudamental theory of SGM for spacetime and matter[3].L=−c32i10j=1(¯ψjγa∂µψj−∂µ¯ψjγaψj),(8)where i=1,2,..,10,κis a fundamental volume of four dimensional spacetime, e aµ(x)is the vierbein of Einstein general relativity theory(EGRT)andΛis a cos-mological constant related to the superon-vacuum coupling constant.Ωis a new scalar curvature analogous to the Ricci scalar curvature R of EGRT.The explicit expression ofΩis obtained by just replacing e aµ(x)by w aµ(x)in Ricci scalar R. The action(7)is invariant at least under GL(4R),local Lorentz,global SO(10)and the following new(NL)SUSY transformationδψi(x)=ζi+iκ(¯ζjγρψj(x))∂ρψi(x),δe aµ(x)=iκ(¯ζjγρψj(x))∂[ρe aµ](x),(9) whereζi,(i=1,..10)is a constant spinor and∂[ρe aµ](x)=∂ρe aµ−∂µe aρ.These results can be understood intuitively by observing that w aµ(x)=e aµ(x)+t aµ(x) defined byωa=w aµdxµ,whereωa is the NL SUSY invariant differential forms of V-A[4],and w aµ(x)and sµν(x)≡w aµ(x)w aν(x)are formally a new vierbein and a new metric tensor in SGM spacetime.In fact,it is not difficult to show the samebehaviors of w aµ(x)and sµν(x)as those of e aµ(x)and gµν(x),i.e.,w aµ(x)and sµν(x) are invertible,w aµw bµ=ηab,sµνw aµw bµ=ηab,..etc.and the following GL(4R) transformations of w aµ(x)and sµν(x)under(9)δζw aµ=ξν∂νw aµ+∂µξνw aν,δζsµν=ξκ∂κsµν+∂µξκsκν+∂νξκsµκ,(10) whereξρ=iκ(¯ζjγρψj(x)).Therefore the similar arguments to EGRT in Riemann space can be carried out straightforwadly by using sµν(x)(or w aµ(x))in stead of gµν(x)(or e aµ(x)),which leads to(7)manifestly invariant at least under the above mentioned symmetries,which are isomorphic to SO(10)SP.The commutators of two new supersymmetry transformations onψ(x)and e aµ(x)are the general coordinate transformations[δζ1,δζ2]ψ=Ξµ∂µψ,[δζ1,δζ2]e aµ=Ξρ∂ρe aµ+e aρ∂µΞρ,(11)whereΞµis defined byΞµ=2ia(¯ζ2γµζ1)−ξρ1ξσ2e aµ(∂[ρe aσ]),which form a closed algebra.In addition,to embed simply the local Lorentz invariance we follow EGRT for-mally and require that the new vierbein w aµ(x)should also have formally a local Lorentz transformation,i.e.,δL w aµ=ǫa b w bµ(12) with the local Lorentz transformation parameterǫab(x)=(1/2)ǫ[ab](x).Interestingly, wefind that the following generalized local Lorentz transformations onψand e aµδLψ(x)=−i4εabcd¯ψγ5γdψ(∂µǫbc)(13)are compbtible with(12).[Note that the equation(13)reduces to the familiar form of the Lorentz transformations if the global transformations are considered,e.g.,δL gµν=0.]Also the local Lorentz transformation on e aµ(x)forms a closed algebra.[δL1,δL2]e aµ=βa b e bµ+κ4Toward Low Energy Theory of SGMFor deriving the low energy behavior of the SGM action it is often useful to linearize such a highly nonlinear theory and obtain a low energy effective theory which is renormalizable.Toward the linearization of the SGM we investigate the lineariza-tion of V-A model in detail.The linearization of V-A model was investigated[6][7] and proved that N=1V-A model of NL SUSY was equivalent to N=1scalar su-permultiplet action of L SUSY which was renormalizable.The general arguments on the constraints which gives the relations between the linear and the nonlinear realizations of global SUSY have been established[6].Following the general argu-ments we show explicitly that nonrenormalizable N=1V-A model is equivalent to a renormalizable total action of a U(1)gauge supermultiplet of the linear SUSY[8] with the Fayet-Iliopoulos(F-I)D term indicating a spontaneous SUSY breaking[9]. Remarkably wefind that the magnitude of F-I D term(vacuum value)is determined to reproduce the correct sign of V-A action and that a U(1)gaugefield constructed explicitly in terms of N-G fermionfields is an axial vector for N=1.An N=1U(1)gauge supermultiplet is given by a real superfield[1]V(x,θ,¯θ)=C+iθχ−i¯θ¯χ+12i¯θ2(M−iN)−θσm¯θv m+iθ2¯θ ¯λ+12iσm∂m¯χ +122C ,(16)where C(x),M(x),N(x),D(x)are real scalarfields,χα(x),λα(x)and¯χ˙α(x),¯λ˙α(x) are Weyl spinors and their complex conjugates,and v m(x)is a real vectorfield.We adopt the notations in ref.[1].Following refs.[6],we define the superfield˜V(x,θ,¯θ) by˜V(x,θ,¯θ)=V(x′,θ′,¯θ′),(17) x′m=x m+iκ ζ(x)σm¯θ−θσm¯ζ(x) ,θ′=θ−κζ(x),¯θ′=¯θ−κ¯ζ(x).(18)˜V may be expanded as(16)in componentfields{˜φi(x)}={˜C(x),˜χ(x),¯˜χ(x),···}, which can be expressed by C,χ,¯χ,···andζ,¯ζby using the relation(17).κis now defined with the dimension(length)2.They have the supertransformations of the formδ˜φi=−iκ ζσm¯ǫ−ǫσm¯ζ ∂m˜φi.(19) Therefore,a condition˜φi(x)=constant is invariant under supertransformations. As we are only interested in the sector which only depends on the N-Gfields,we eliminate other degrees of freedom than the N-Gfields by imposing SUSY invariant constraints˜C=˜χ=˜M=˜N=˜vm =˜λ=0,˜D=1Solving these constraints wefind that the original componentfields C,χ,¯χ,···can be expressed by the N-Gfieldsζ,¯ζ.Among them,the leading terms in the expansion of thefields v m,λ,¯λand D,which contain gauge invariant degrees of freedom,inκarev m=κζσm¯ζ+·,λ=iζ−1κ+iκ ζσm∂m¯ζ−∂mζσm¯ζ +·,(21)where·are higher order terms inκ.Our discussion so far does not depend on a particular form of the action.We now consider a free action of a U(1)gauge supermultiplet of L SUSY with a Fayet-Iliopoulos D term.In componentfields we haveS= d4x −12D2−1κ=0in accordance with eq.(20),which indicates the spontaneousbreakdown of supersymmetry.We substitute eq.(21)into the action(22)and obtain an action for the N-Gfieldsζ,¯ζwhich is exactly N=1V-A action.S=−13The author would like to thank Alexander von Humboldt Foundation for the generous support and J.Wess for his encouragement,enlightening discussions and the warm hospitality through the works.He is also grateful to M.Tsuda and Y. Tanii for the collaborations and K.Mizutani and T.Shirafuji for useful discussions and the hospitality at Physics Department of Saitama University.References[1]J.Wess and J.Bagger,Supersymmetry and Supergravity(Princeton Univ.Press,1992).[2]K.Shima,Z.Phys.C18,25(1983).K.Shima,European.Phys.J.C7,341(1999).[3]K.Shima,Phys.Lett.B501,237(2001).[4]D.V.Volkov and V.P.Akulov,Phys.Lett.B46,109(1973).[5]K.Shima and M.Tsuda,Phys.Lett.B507,260(2001).[6]E.A.Ivanov and A.A.Kapustnikov,J.Phys.,A11,2375(1978).[7]M.Roˇc ek,Phys.Rev.Lett.41,451(1978).[8]J.Wess anc B.Zumino,Nucl.Phys.,B78,1(1974).[9]K.Shima,Y.Tanii and M.Tsuda,Phys.Lett.B(2002),in press.[10]K.Shima and M.Tsuda,hep-th/0109042.[11]K.Shima and M.Tsuda,Phys.Lett.B521,67(2001).11。
Glider Flying Handbook说明书
Glider Flying Handbook2013U.S. Department of TransportationFEDERAL AVIATION ADMINISTRATIONFlight Standards Servicei iPrefaceThe Glider Flying Handbook is designed as a technical manual for applicants who are preparing for glider category rating and for currently certificated glider pilots who wish to improve their knowledge. Certificated flight instructors will find this handbook a valuable training aid, since detailed coverage of aeronautical decision-making, components and systems, aerodynamics, flight instruments, performance limitations, ground operations, flight maneuvers, traffic patterns, emergencies, soaring weather, soaring techniques, and cross-country flight is included. Topics such as radio navigation and communication, use of flight information publications, and regulations are available in other Federal Aviation Administration (FAA) publications.The discussion and explanations reflect the most commonly used practices and principles. Occasionally, the word “must” or similar language is used where the desired action is deemed critical. The use of such language is not intended to add to, interpret, or relieve a duty imposed by Title 14 of the Code of Federal Regulations (14 CFR). Persons working towards a glider rating are advised to review the references from the applicable practical test standards (FAA-G-8082-4, Sport Pilot and Flight Instructor with a Sport Pilot Rating Knowledge Test Guide, FAA-G-8082-5, Commercial Pilot Knowledge Test Guide, and FAA-G-8082-17, Recreational Pilot and Private Pilot Knowledge Test Guide). Resources for study include FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, FAA-H-8083-2, Risk Management Handbook, and Advisory Circular (AC) 00-6, Aviation Weather For Pilots and Flight Operations Personnel, AC 00-45, Aviation Weather Services, as these documents contain basic material not duplicated herein. All beginning applicants should refer to FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, for study and basic library reference.It is essential for persons using this handbook to become familiar with and apply the pertinent parts of 14 CFR and the Aeronautical Information Manual (AIM). The AIM is available online at . The current Flight Standards Service airman training and testing material and learning statements for all airman certificates and ratings can be obtained from .This handbook supersedes FAA-H-8083-13, Glider Flying Handbook, dated 2003. Always select the latest edition of any publication and check the website for errata pages and listing of changes to FAA educational publications developed by the FAA’s Airman Testing Standards Branch, AFS-630.This handbook is available for download, in PDF format, from .This handbook is published by the United States Department of Transportation, Federal Aviation Administration, Airman Testing Standards Branch, AFS-630, P.O. Box 25082, Oklahoma City, OK 73125.Comments regarding this publication should be sent, in email form, to the following address:********************************************John M. AllenDirector, Flight Standards Serviceiiii vAcknowledgmentsThe Glider Flying Handbook was produced by the Federal Aviation Administration (FAA) with the assistance of Safety Research Corporation of America (SRCA). The FAA wishes to acknowledge the following contributors: Sue Telford of Telford Fishing & Hunting Services for images used in Chapter 1JerryZieba () for images used in Chapter 2Tim Mara () for images used in Chapters 2 and 12Uli Kremer of Alexander Schleicher GmbH & Co for images used in Chapter 2Richard Lancaster () for images and content used in Chapter 3Dave Nadler of Nadler & Associates for images used in Chapter 6Dave McConeghey for images used in Chapter 6John Brandon (www.raa.asn.au) for images and content used in Chapter 7Patrick Panzera () for images used in Chapter 8Jeff Haby (www.theweatherprediction) for images used in Chapter 8National Soaring Museum () for content used in Chapter 9Bill Elliot () for images used in Chapter 12.Tiffany Fidler for images used in Chapter 12.Additional appreciation is extended to the Soaring Society of America, Inc. (), the Soaring Safety Foundation, and Mr. Brad Temeyer and Mr. Bill Martin from the National Oceanic and Atmospheric Administration (NOAA) for their technical support and input.vv iPreface (iii)Acknowledgments (v)Table of Contents (vii)Chapter 1Gliders and Sailplanes ........................................1-1 Introduction....................................................................1-1 Gliders—The Early Years ..............................................1-2 Glider or Sailplane? .......................................................1-3 Glider Pilot Schools ......................................................1-4 14 CFR Part 141 Pilot Schools ...................................1-5 14 CFR Part 61 Instruction ........................................1-5 Glider Certificate Eligibility Requirements ...................1-5 Common Glider Concepts ..............................................1-6 Terminology...............................................................1-6 Converting Metric Distance to Feet ...........................1-6 Chapter 2Components and Systems .................................2-1 Introduction....................................................................2-1 Glider Design .................................................................2-2 The Fuselage ..................................................................2-4 Wings and Components .............................................2-4 Lift/Drag Devices ...........................................................2-5 Empennage .....................................................................2-6 Towhook Devices .......................................................2-7 Powerplant .....................................................................2-7 Self-Launching Gliders .............................................2-7 Sustainer Engines .......................................................2-8 Landing Gear .................................................................2-8 Wheel Brakes .............................................................2-8 Chapter 3Aerodynamics of Flight .......................................3-1 Introduction....................................................................3-1 Forces of Flight..............................................................3-2 Newton’s Third Law of Motion .................................3-2 Lift ..............................................................................3-2The Effects of Drag on a Glider .....................................3-3 Parasite Drag ..............................................................3-3 Form Drag ...............................................................3-3 Skin Friction Drag ..................................................3-3 Interference Drag ....................................................3-5 Total Drag...................................................................3-6 Wing Planform ...........................................................3-6 Elliptical Wing ........................................................3-6 Rectangular Wing ...................................................3-7 Tapered Wing .........................................................3-7 Swept-Forward Wing ..............................................3-7 Washout ..................................................................3-7 Glide Ratio .................................................................3-8 Aspect Ratio ............................................................3-9 Weight ........................................................................3-9 Thrust .........................................................................3-9 Three Axes of Rotation ..................................................3-9 Stability ........................................................................3-10 Flutter .......................................................................3-11 Lateral Stability ........................................................3-12 Turning Flight ..............................................................3-13 Load Factors .................................................................3-13 Radius of Turn ..........................................................3-14 Turn Coordination ....................................................3-15 Slips ..........................................................................3-15 Forward Slip .........................................................3-16 Sideslip .................................................................3-17 Spins .........................................................................3-17 Ground Effect ...............................................................3-19 Chapter 4Flight Instruments ...............................................4-1 Introduction....................................................................4-1 Pitot-Static Instruments ..................................................4-2 Impact and Static Pressure Lines................................4-2 Airspeed Indicator ......................................................4-2 The Effects of Altitude on the AirspeedIndicator..................................................................4-3 Types of Airspeed ...................................................4-3Table of ContentsviiAirspeed Indicator Markings ......................................4-5 Other Airspeed Limitations ........................................4-6 Altimeter .....................................................................4-6 Principles of Operation ...........................................4-6 Effect of Nonstandard Pressure andTemperature............................................................4-7 Setting the Altimeter (Kollsman Window) .............4-9 Types of Altitude ......................................................4-10 Variometer................................................................4-11 Total Energy System .............................................4-14 Netto .....................................................................4-14 Electronic Flight Computers ....................................4-15 Magnetic Compass .......................................................4-16 Yaw String ................................................................4-16 Inclinometer..............................................................4-16 Gyroscopic Instruments ...............................................4-17 G-Meter ........................................................................4-17 FLARM Collision Avoidance System .........................4-18 Chapter 5Glider Performance .............................................5-1 Introduction....................................................................5-1 Factors Affecting Performance ......................................5-2 High and Low Density Altitude Conditions ...........5-2 Atmospheric Pressure .............................................5-2 Altitude ...................................................................5-3 Temperature............................................................5-3 Wind ...........................................................................5-3 Weight ........................................................................5-5 Rate of Climb .................................................................5-7 Flight Manuals and Placards ..........................................5-8 Placards ......................................................................5-8 Performance Information ...........................................5-8 Glider Polars ...............................................................5-8 Weight and Balance Information .............................5-10 Limitations ...............................................................5-10 Weight and Balance .....................................................5-12 Center of Gravity ......................................................5-12 Problems Associated With CG Forward ofForward Limit .......................................................5-12 Problems Associated With CG Aft of Aft Limit ..5-13 Sample Weight and Balance Problems ....................5-13 Ballast ..........................................................................5-14 Chapter 6Preflight and Ground Operations .......................6-1 Introduction....................................................................6-1 Assembly and Storage Techniques ................................6-2 Trailering....................................................................6-3 Tiedown and Securing ................................................6-4Water Ballast ..............................................................6-4 Ground Handling........................................................6-4 Launch Equipment Inspection ....................................6-5 Glider Preflight Inspection .........................................6-6 Prelaunch Checklist ....................................................6-7 Glider Care .....................................................................6-7 Preventive Maintenance .............................................6-8 Chapter 7Launch and Recovery Procedures and Flight Maneuvers ............................................................7-1 Introduction....................................................................7-1 Aerotow Takeoff Procedures .........................................7-2 Signals ........................................................................7-2 Prelaunch Signals ....................................................7-2 Inflight Signals ........................................................7-3 Takeoff Procedures and Techniques ..........................7-3 Normal Assisted Takeoff............................................7-4 Unassisted Takeoff.....................................................7-5 Crosswind Takeoff .....................................................7-5 Assisted ...................................................................7-5 Unassisted...............................................................7-6 Aerotow Climb-Out ....................................................7-6 Aerotow Release.........................................................7-8 Slack Line ...................................................................7-9 Boxing the Wake ......................................................7-10 Ground Launch Takeoff Procedures ............................7-11 CG Hooks .................................................................7-11 Signals ......................................................................7-11 Prelaunch Signals (Winch/Automobile) ...............7-11 Inflight Signals ......................................................7-12 Tow Speeds ..............................................................7-12 Automobile Launch ..................................................7-14 Crosswind Takeoff and Climb .................................7-14 Normal Into-the-Wind Launch .................................7-15 Climb-Out and Release Procedures ..........................7-16 Self-Launch Takeoff Procedures ..............................7-17 Preparation and Engine Start ....................................7-17 Taxiing .....................................................................7-18 Pretakeoff Check ......................................................7-18 Normal Takeoff ........................................................7-19 Crosswind Takeoff ...................................................7-19 Climb-Out and Shutdown Procedures ......................7-19 Landing .....................................................................7-21 Gliderport/Airport Traffic Patterns and Operations .....7-22 Normal Approach and Landing ................................7-22 Crosswind Landing ..................................................7-25 Slips ..........................................................................7-25 Downwind Landing ..................................................7-27 After Landing and Securing .....................................7-27viiiPerformance Maneuvers ..............................................7-27 Straight Glides ..........................................................7-27 Turns.........................................................................7-28 Roll-In ...................................................................7-29 Roll-Out ................................................................7-30 Steep Turns ...........................................................7-31 Maneuvering at Minimum Controllable Airspeed ...7-31 Stall Recognition and Recovery ...............................7-32 Secondary Stalls ....................................................7-34 Accelerated Stalls .................................................7-34 Crossed-Control Stalls ..........................................7-35 Operating Airspeeds .....................................................7-36 Minimum Sink Airspeed ..........................................7-36 Best Glide Airspeed..................................................7-37 Speed to Fly ..............................................................7-37 Chapter 8Abnormal and Emergency Procedures .............8-1 Introduction....................................................................8-1 Porpoising ......................................................................8-2 Pilot-Induced Oscillations (PIOs) ..............................8-2 PIOs During Launch ...................................................8-2 Factors Influencing PIOs ........................................8-2 Improper Elevator Trim Setting ..............................8-3 Improper Wing Flaps Setting ..................................8-3 Pilot-Induced Roll Oscillations During Launch .........8-3 Pilot-Induced Yaw Oscillations During Launch ........8-4 Gust-Induced Oscillations ..............................................8-5 Vertical Gusts During High-Speed Cruise .................8-5 Pilot-Induced Pitch Oscillations During Landing ......8-6 Glider-Induced Oscillations ...........................................8-6 Pitch Influence of the Glider Towhook Position ........8-6 Self-Launching Glider Oscillations During Powered Flight ...........................................................8-7 Nosewheel Glider Oscillations During Launchesand Landings ..............................................................8-7 Tailwheel/Tailskid Equipped Glider Oscillations During Launches and Landings ..................................8-8 Aerotow Abnormal and Emergency Procedures ............8-8 Abnormal Procedures .................................................8-8 Towing Failures........................................................8-10 Tow Failure With Runway To Land and Stop ......8-11 Tow Failure Without Runway To Land BelowReturning Altitude ................................................8-11 Tow Failure Above Return to Runway Altitude ...8-11 Tow Failure Above 800' AGL ..............................8-12 Tow Failure Above Traffic Pattern Altitude .........8-13 Slack Line .................................................................8-13 Ground Launch Abnormal and Emergency Procedures ....................................................................8-14 Abnormal Procedures ...............................................8-14 Emergency Procedures .............................................8-14 Self-Launch Takeoff Emergency Procedures ..............8-15 Emergency Procedures .............................................8-15 Spiral Dives ..................................................................8-15 Spins .............................................................................8-15 Entry Phase ...............................................................8-17 Incipient Phase .........................................................8-17 Developed Phase ......................................................8-17 Recovery Phase ........................................................8-17 Off-Field Landing Procedures .....................................8-18 Afterlanding Off Field .............................................8-20 Off-Field Landing Without Injury ........................8-20 Off-Field Landing With Injury .............................8-20 System and Equipment Malfunctions ..........................8-20 Flight Instrument Malfunctions ................................8-20 Airspeed Indicator Malfunctions ..........................8-21 Altimeter Malfunctions .........................................8-21 Variometer Malfunctions ......................................8-21 Compass Malfunctions .........................................8-21 Glider Canopy Malfunctions ....................................8-21 Broken Glider Canopy ..........................................8-22 Frosted Glider Canopy ..........................................8-22 Water Ballast Malfunctions ......................................8-22 Retractable Landing Gear Malfunctions ..................8-22 Primary Flight Control Systems ...............................8-22 Elevator Malfunctions ..........................................8-22 Aileron Malfunctions ............................................8-23 Rudder Malfunctions ............................................8-24 Secondary Flight Controls Systems .........................8-24 Elevator Trim Malfunctions .................................8-24 Spoiler/Dive Brake Malfunctions .........................8-24 Miscellaneous Flight System Malfunctions .................8-25 Towhook Malfunctions ............................................8-25 Oxygen System Malfunctions ..................................8-25 Drogue Chute Malfunctions .....................................8-25 Self-Launching Gliders ................................................8-26 Self-Launching/Sustainer Glider Engine Failure During Takeoff or Climb ..........................................8-26 Inability to Restart a Self-Launching/SustainerGlider Engine While Airborne .................................8-27 Self-Launching Glider Propeller Malfunctions ........8-27 Self-Launching Glider Electrical System Malfunctions .............................................................8-27 In-flight Fire .............................................................8-28 Emergency Equipment and Survival Gear ...................8-28 Survival Gear Checklists ..........................................8-28 Food and Water ........................................................8-28ixClothing ....................................................................8-28 Communication ........................................................8-29 Navigation Equipment ..............................................8-29 Medical Equipment ..................................................8-29 Stowage ....................................................................8-30 Parachute ..................................................................8-30 Oxygen System Malfunctions ..................................8-30 Accident Prevention .....................................................8-30 Chapter 9Soaring Weather ..................................................9-1 Introduction....................................................................9-1 The Atmosphere .............................................................9-2 Composition ...............................................................9-2 Properties ....................................................................9-2 Temperature............................................................9-2 Density ....................................................................9-2 Pressure ...................................................................9-2 Standard Atmosphere .................................................9-3 Layers of the Atmosphere ..........................................9-4 Scale of Weather Events ................................................9-4 Thermal Soaring Weather ..............................................9-6 Thermal Shape and Structure .....................................9-6 Atmospheric Stability .................................................9-7 Air Masses Conducive to Thermal Soaring ...................9-9 Cloud Streets ..............................................................9-9 Thermal Waves...........................................................9-9 Thunderstorms..........................................................9-10 Lifted Index ..........................................................9-12 K-Index .................................................................9-12 Weather for Slope Soaring .......................................9-14 Mechanism for Wave Formation ..............................9-16 Lift Due to Convergence ..........................................9-19 Obtaining Weather Information ...................................9-21 Preflight Weather Briefing........................................9-21 Weather-ReIated Information ..................................9-21 Interpreting Weather Charts, Reports, andForecasts ......................................................................9-23 Graphic Weather Charts ...........................................9-23 Winds and Temperatures Aloft Forecast ..............9-23 Composite Moisture Stability Chart .....................9-24 Chapter 10Soaring Techniques ..........................................10-1 Introduction..................................................................10-1 Thermal Soaring ...........................................................10-2 Locating Thermals ....................................................10-2 Cumulus Clouds ...................................................10-2 Other Indicators of Thermals ................................10-3 Wind .....................................................................10-4 The Big Picture .....................................................10-5Entering a Thermal ..............................................10-5 Inside a Thermal.......................................................10-6 Bank Angle ...........................................................10-6 Speed .....................................................................10-6 Centering ...............................................................10-7 Collision Avoidance ................................................10-9 Exiting a Thermal .....................................................10-9 Atypical Thermals ..................................................10-10 Ridge/Slope Soaring ..................................................10-10 Traps ......................................................................10-10 Procedures for Safe Flying .....................................10-12 Bowls and Spurs .....................................................10-13 Slope Lift ................................................................10-13 Obstructions ...........................................................10-14 Tips and Techniques ...............................................10-15 Wave Soaring .............................................................10-16 Preflight Preparation ...............................................10-17 Getting Into the Wave ............................................10-18 Flying in the Wave .................................................10-20 Soaring Convergence Zones ...................................10-23 Combined Sources of Updrafts ..............................10-24 Chapter 11Cross-Country Soaring .....................................11-1 Introduction..................................................................11-1 Flight Preparation and Planning ...................................11-2 Personal and Special Equipment ..................................11-3 Navigation ....................................................................11-5 Using the Plotter .......................................................11-5 A Sample Cross-Country Flight ...............................11-5 Navigation Using GPS .............................................11-8 Cross-Country Techniques ...........................................11-9 Soaring Faster and Farther .........................................11-11 Height Bands ..........................................................11-11 Tips and Techniques ...............................................11-12 Special Situations .......................................................11-14 Course Deviations ..................................................11-14 Lost Procedures ......................................................11-14 Cross-Country Flight in a Self-Launching Glider .....11-15 High-Performance Glider Operations and Considerations ............................................................11-16 Glider Complexity ..................................................11-16 Water Ballast ..........................................................11-17 Cross-Country Flight Using Other Lift Sources ........11-17 Chapter 12Towing ................................................................12-1 Introduction..................................................................12-1 Equipment Inspections and Operational Checks .........12-2 Tow Hook ................................................................12-2 Schweizer Tow Hook ...........................................12-2x。
形状记忆合金变刚度软作动器设计

第 43 卷第 6 期2023 年 12 月振动、测试与诊断Vol. 43 No. 6Dec.2023 Journal of Vibration,Measurement & Diagnosis形状记忆合金变刚度软作动器设计∗任旭,杨书吉,文浩,金栋平(南京航空航天大学机械结构力学及控制国家重点实验室南京,210016)摘要软体材料作动器具有良好的目标抓取适应性,为实现软作动器结构的轻量化,保证抓取与承载能力,采用形状记忆合金丝作为驱动元件,设计出一种可变刚度的软作动器。
首先,基于形状记忆合金(shape memory alloy,简称SMA)一维本构关系建立了作动器的弯曲变形力学模型;其次,通过实验对力与变形之间的关系进行了验证,弯曲变形与理论结果一致;最后,通过回弹结构的动力学设计,使得该作动器能够在恢复阶段快速回到初始形态。
实验结果显示,加热用于变刚度的形状记忆合金丝可显著提升作动器的负载能力,从而达到变刚度的效果。
关键词形状记忆合金;可变刚度;本构模型;软体作动器中图分类号TP242;TH11引言机器人通常由刚性部件通过控制系统、驱动机构及关节等来完成各种复杂的动作[1]。
为适应不同的工作环境和特定的任务需求,完全由刚性部件构建的机器人则难以胜任[2]。
受到自然界生物的启发,人们越来越趋于采用具有极低刚度与高适应性的软作动器来代替刚性抓取器,如生物肌肉[3]、章鱼触手和啄木鸟的脖子[4]等。
目前,软作动器有多种驱动形式。
例如,气泵软作动器通过内部气压调节实现变形并维持形状[5];线缆驱动的软作动器是通过电机带动线缆来驱使软作动器变形[6]。
然而,这类作动器需外置动力装置,不够轻便。
基于电活性聚合物的作动器驱动力小、寿命短且响应时间长[7]。
工业上广泛使用的压电材料也可被用于软作动器,但压电材料变形有限,同时驱动电压较高[8]。
此外,形状记忆聚合物(shape memory polymer,简称SMP)因具有变刚度的特性也被用于软作动器中,但SMP自身刚度较低,很难用于抓取大质量物体[9]。
新天地电子(Newtons4th Ltd)N4L 7949 03 3kHz高频交流电源商品说明书

DC~3kHZ Bandwidth (10kHz small signal)Better than 0.3% THD Isolated OutputRegenerative Option0~270V & 0~135V RMS 0~11.1Arms & 0~22.2Arms ContinuousStackable Parallel OptionCombine units to create a 3 Phase system (Delta/Star)Newtons4th Ltd794903-Advanced Power SourcesHighIEC ENWhite Goods, Aerospace, Consumer Electronics, Single and Three PhaseParallel up to 9 units [27kVA] in single and 3 phase configirationArbitrary waveform generation including harmonic synthesis IEC61000 ComplianceSOURCE WITH A SINGLE PHASE UNIVERSAL INPUTPOWER ELECTRONICS EXPERTISE MEASUREMENT EXPERTISEQUALITYISO17025ACCREDITATIONMASTER8x SLAVESGROUP 1 50Hz 220V L-N0° Phase OffsetGROUP 1 50Hz 220V L-N120° Phase Offset GROUP 1 50Hz 220V L-N240° Phase OffsetR&DUSB, RS232, CAN and a Parallel networking bus to control the N4AX when in master-slave configuration.Input, Output and Sense terminals feature high quality removable connectors making connection and disconnection from a system extremely easy. Spare connectors are readily available from worldwide component stockists.There is also a Regen Option connector on the rear of the N4AX which facilitates connection to a regen unit. N4L will be releasing the regen unit during 2018.Waveform Example : DO-160 Section 16.5.1.2(Voltage modulation, AC)Waveform Example : DO-160 Section 16.5.1.4(Momentary Power Interruptions, AC)consumer electronics. An example application is development and test of AC/DC mobile phone chargers, where the N4AX can be paired up with a PPA500 or PPA1500 precision power analyzer to provide a complete measurement solution.The N4AX can be employed to generate a constant sinusoidal output, or it can be configuredto apply high levels of distortion, voltage sags or voltage surges to the device under test, forexample.AnalyzerAnalyzerand analysis of up to 6 DUT’s. The example below shows 6 mobile phone battery chargers being simultaneously powered and analyzed by the N4AX and PPA3500.components. This makes the N4AX able to generate power for both automotive inverter design and test applications as well as development and test of grid connected charging systems.immunity tests. The N4AX offers a very low distortion output which is a key requirement of the Harmonics and Flicker standard. The output impedance is also extremely low, a key performance IEC7949occur. The N4AX series of power sources are able to signal to the rest of the system that a fault has occured and immediate shut down of the system is initiated to protect the device under test as well as the remaining N4AX power sources. This is known as the “high speed kill function”.As N4AX power sources can act as a master and a slave, even if the original master unit is in fault condition one of the remaining N4AX units can take over master responsibilities and system operation can resume. (see example below)7949Newtons4th Ltd 1 Bede Island RoadLeicester LE2 7EAUKPhone: +44 (0)116 230 1066 Fax: +44 (0)116 230 1061Email:********************Web: copyright © 2010-2018 Newtons4th Document ref: N4AX/iss3/Mar_2018Newtons4th Newtons4th Ltd (abbreviated to N4L) was established in 1997 to design, manufacture and support innovative electronic equipment to a worldwide market, specialising in sophisticated test equipment particularly related to phase measurement. The company was founded on the principle of using the latest technology and sophisticated analysis techniques in order to provide our customers with accurate, easy to use instruments at a lower price than has been traditionally associated with these types of measurementsAll specifications at 23˚C ± 5˚C . These specifications are quoted in good faith but Newtons4th Ltd reserves the right to amend any specification at any time without notice.Contact your local N4L Distributor for further detailsDistributed By :Flexibility in our products and an attitude to providing the solutions that our customers really want has allowed us to develop many innovative functions in our ever increasing product range(Sales, Support, Calibration)。
ZXSC310单 多元LED驱动器说明书
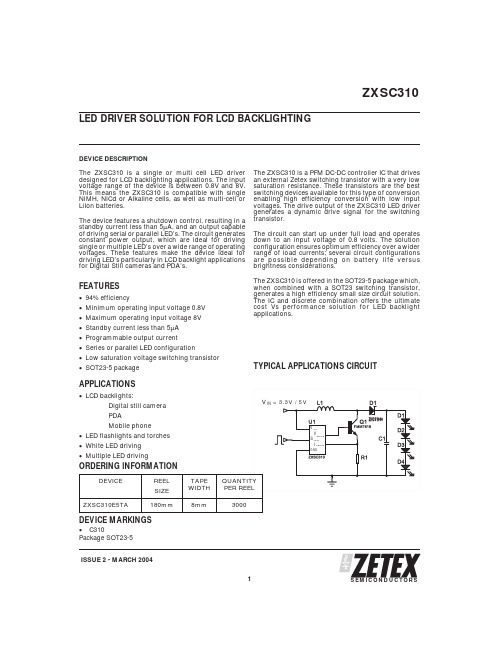
DEVICE DESCRIPTIONThe ZXSC310is a single or multi cell LED driver designed for LCD backlighting applications.The input voltage range of the device is between 0.8V and 8V.This means the ZXSC310is compatible with single NiMH,NiCd or Alkaline cells,as well as multi-cell or LiIon batteries.The device features a shutdown control,resulting in a standby current less than 5µA,and an output capable of driving serial or parallel LED’s.The circuit generates constant power output,which are ideal for driving single or multiple LED’s over a wide range of operating voltages.These features make the device ideal for driving LED’s particularly in LCD backlight applications for Digital Still cameras and PDA’s.FEATURES·94% efficiency·Minimum operating input voltage 0.8V ·Maximum operating input voltage 8V ·Standby current less than 5µA ·Programmable output current ·Series or parallel LED configuration ·Low saturation voltage switching transistor ·SOT23-5 packageThe ZXSC310is a PFM DC-DC controller IC that drives an external Zetex switching transistor with a very low saturation resistance.These transistors are the best switching devices available for this type of conversion enabling high efficiency conversion with low input voltages.The drive output of the ZXSC310LED driver generates a dynamic drive signal for the switching transistor.The circuit can start up under full load and operates down to an input voltage of 0.8volts.The solution configuration ensures optimum efficiency over a wider range of load currents;several circuit configurations are possible depending on battery life versus brightness considerations.The ZXSC310is offered in the SOT23-5package which,when combined with a SOT23switching transistor,generates a high efficiency small size circuit solution.The IC and discrete combination offers the ultimate cost Vs performance solution for LED backlight applications.ZXSC310ISSUE 2 - MARCH 20041S E M I C O N D U C T O R SLED DRIVER SOLUTION FOR LCD BACKLIGHTINGTYPICAL APPLICATIONS CIRCUITDEVICE MARKINGS·C310Package SOT23-5ABSOLUTE MAXIMUM RATINGS:Supply Voltage-0.3 to 10V Maximum Voltage other pins -0.3 to V CC +0.3V Power Dissipation 450mW Operating Temperature -40 to 85°C Storage Temperature-55 to 150°CS E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 20042ELECTRICAL CHARACTERISTICS:Test conditions unless otherwise stated:V =1.5V,T =25COPERATING CONDITIONS1 Application dependent, see reference designs2 These parameters guaranteed by Design and characteristics3 Total supply current =I Q +I VDRIVE , see typical characteristics4 Operating frequency is application circuit dependent. See applications section.FMMT618For the circuits described in the applications section Zetex FMMT618is the recommended pass transistor.ZHCS1000For the maximum brightness circuit described in the applications section Zetex ZHCS1000is the recommended Schottky diode.The following indicates outline data for the device,more detailed information can be found in the Zetex surface mount products data book or on Zetex Web page:The following indicates outline data for the ZHCS,more detailed information can be found on Zetex Web page:ZXSC310ISSUE 2 - MARCH 2004S E M I C O N D U C T O R S3ELECTRICAL CHARACTERISTICS:Test conditions unless otherwise stated:T AMB =25C5Measured under pulse conditions. Pulse width=300µs. Duty cycle Յ2%ELECTRICAL CHARACTERISTICS:Test conditions unless otherwise stated:T =25CPart NumberV R I F I FSM V F at I R at Capacitance at V R =25V,f =1MHzPackage Max.VMax.mA Max.A Max.mV I F mA Max.A V R V Typ.pF SOT23BAT54302000.6500302502510SOT23-6ZHCS200040200020500200010003060SOT23ZHCS10004010001250010001003025SOT23ZHCS75040750125407501003025SOT23ZHCS50040500 6.75550500403020SOT23ZHCS400404006.75500400403020SOT323S E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 20044TYPICAL CHARACTERISTICSDEVICE DESCRIPTIONThe ZXSC310is PFM,controller IC which,when combined with a high performance external transistor, enables the production of a high efficiency boost converter for LED driving applications.A block diagram is shown for the ZXSC310 below.The on chip comparator forces the driver circuit and therefore the external switching transistor off if the voltage at I SENSE exceeds19mV.An internal reference circuit and divider set this threshold.The voltage at I SENSE is taken from a current sense resistor connected in series with the emitter of the switching transistor.A monostable following the output of the comparator forces the turn-off time of the output stage to be typically1.7us.This ensures that there is sufficient time to discharge the inductor coil before the next on period.With every on pulse the switching transistor is kept on until the voltage across the current-sense resistor exceeds the threshold of the I SENSE input.The on-pulse length,and therefore the switching frequency,is determined by the programmed peak current,the input voltage and the input to output voltage differential.See applications section for details.The driver circuit supplies the external switching transistor with a fixed drive current.To maximise efficiency the external transistor switched quickly, typically being forced off within 30ns.ZXSC310ISSUE 2 - MARCH 20045S E M I C O N D U C T O R SREFERENCE DESIGNSThree typical LED driving applications are shown.Firstly a typical LCD backlight circuit,then maximum brightness LED driving solution and lastly an optimised battery life LED driving solution.This application shows the ZXSC310in a typical LCD backlight application for Digital Still Cameras and PDA’s.The input voltage for these backlight circuits are usually fixed from the main system power,typically 3.3V or 5V.The LED’s are connected serially so that the light is distributed uniformly in each LED.The current provided to the LED’s can either be pulsed or DC.The DC current is programmable via a sense resistor,R SENSE ,and is set to an optimum LED current of 20mA for the reference designs.DC current is achieved by adding a Schottky rectifying diode and an output capacitor, as shown in the reference design below.S E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 20046LCD backlightcircuitRef Value Part Number Manufacture CommentsU1N/A ZXSC310E5Zetex Plc Single cell converter,SOT23-5Q1N/A FMMT618Zetex Plc Low V CE(sat )NPN,SOT23D1N/A ZHCS1000Zetex Plc1A Schottky diode,SOT23C1 2.2F Generic Various 0805Size R16150m ⍀Generic Various 1206Size R17250m ⍀GenericVarious1206SizeL1868µHSurface mount inductorMaterials list6Used for 3.3V input,I LED set to 20mA Ϯ10%.7Used for 5V input,I LED to 20mA Ϯ10%.8See Application section.(Notes)ZXSC310ISSUE 2 - MARCH 20047S E M I C O N D U C T O R SThis circuit provides a continuous current output to the LED by rectifying and buffering the DC-DC output.This ensures maximum LED brightness.Ref Value Part Number Manufacturer CommentsU1N/A ZXSC310E5Zetex Plc Single cell converter,SOT23-5Q1N/A FMMT617Zetex Plc LowVCE(sat)NPN,SOT23D11A ZHCS1000Zetex Plc 1A Shottky diode,SOT23R1100m ⍀Generic Various 0805SizeC1 2.2F GenericVariousLow ESR ceramic capacitor L1100µH8Surface mount inductorMaterials list8See Application section.Maximum brightness solution(Notes)To ensure optimum efficiency,and therefore maximum battery life,the LED is supplied with a pulsed current.Maximum efficiency is ensured with the removal of rectifier losses experienced in the maximum brightness solution .S E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 20048Ref Value Part Number Manufacturer CommentsU1N/A ZXSC310E5Zetex Plc Single cell converter,SOT23-5Q1N/A FMMT617Zetex Plc Low V CE(SAT)NPN,SOT23R1330m ⍀GenericVarious0805SizeL1100H 8Surface mount inductorMaterials list8See Application section.Maximum battery life solution(Notes)APPLICATIONS INFORMATIONThe following section is a design guide for optimum converter performance.Switching transistor selectionThe choice of switching transistor has a major impact on the converter efficiency.For optimum performance,a bipolar transistor with low V CE(SAT)and high gain is required.The Zetex FMMT618is an ideal choice of transistor,having a low saturation voltage.A data sheet for the FMMT618is available on Zetex web site or through your local Zetex sales office.Outline information is included in the characteristics section of this data sheet.Schottky diode selectionFor the maximum battery life solution a Schottky rectifier diode is not required.As with the switching transistor the Schottky rectifier diode has a major impact on the converter efficiency.A Schottky diode with a low forward voltage and fast recovery time should be used for this application.The diode should be selected so that the maximum forward current is greater or equal to the maximum peak current in the inductor,and the maximum reverse voltage is greater or equal to the output voltage.The Zetex ZHCS1000meets these needs.Datasheets for the ZHCS Series are available on Zetex web site or through your local Zetex sales office.Outline information is included in the characteristics section of this data sheet.For the maximum brightness solution a pulsed current is supplied to the LED and thus a Schottky rectifier diode is required.Inductor selectionThe inductor value must be chosen to satisfy performance,cost and size requirements of the overall solution.For the LCD backlight reference design we recommend an inductor value of 68uH with a core saturation current rating greater than the converter peak current value and low series resistance.Inductor selection has a significant impact on the converter performance.For applications where efficiency is critical,an inductor with a series resistance of 500m ⍀or less should be used.A list of recommended inductors is shown in the table below:ZXSC310ISSUE 2 - MARCH 2004S E M I C O N D U C T O R S9Part No.Manufacture L I PK R DC DO1608C-683Coilcraft 68H 0.4A 0.86⍀CR54-680Sumida 68H 0.61A 0.46⍀P1174.683Pulse 68H 0.4A 0.37⍀SFOP5845-R61680Samwha 68H 0.61A 0.46⍀SIS43-680Delta68H0.41.125⍀Peak current definitionThe peak current rating is a design parameter whose value is dependent upon the overall application.For the high brightness reference designs,a peak current of was chosen to ensure that the converter could provide the required output power to the LED.In general,the I PK value must be chosen to ensure that the switching transistor,Q1,is in full saturation with maximum output power conditions,assuming worse-case input voltage and transistor gain under all operating temperature extremes.Once I PK is decided the value of R SENSE can be determined by:A selection guide of sense resistor and inductor values for given input voltages,output currents and number of LED connected in series is provided in the table below.S E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 200410R V I SENSE ISENSE PK=Output Power CalculationBy making the above assumptions for inductance and peak current the output power can be determined by:Note:V OUT =output voltage +Schottky rectifier voltage drop.WhereT OFF ≅1.7us (internally set by ZXSC310)and andWhereOperating frequency can be derived by:Capacitor selectionFor pulsed operation,as in the maximum battery life solution,no capacitors are required at the output to the LED.For rectified operation,as in the maximum brightness solution,a small value ceramic capacitor is required, typically 2.2uF.Generally an input capacitor is not required,but a small ceramic capacitor may be added to aid EMC,typically 470nF to 1uF.(notes)ZXSC310ISSUE 2 - MARCH 200411S E M I C O N D U C T O R S()I I V V T LMIN PK OUT IN OFF=−−×()F T T ON OFF =+1I I I AV PK MIN=+2()T T V V V ON OFF OUT IN IN=−P V V I T T T OUT OUT IN AV OFFON OFF=−××+()Shutdown ControlThe ZXSC310offers a shutdown mode that produces a standby current of less than 5uA when in operation.When the voltage at the S TDN pin is 0.7V or higher the ZXSC310is enabled,hence the driver is in normal operation.When the voltage at the S TDN pin is 0.1V or lower the ZXSC310is disabled,hence the driver is in shutdown mode.If the S TDN pin is open circuit the ZXSC310 is also enabled.Layout of LCD backlighting solutionDemonstration boardA demonstration board for the LCD backlighting solution,is available upon request.These can be obtained through your local Zetex office or through Zetex web pages.For all reference designs Gerber files and bill of materials can be supplied.S E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 200412Top SilkDrill FileTop Copper Bottom CopperZXSC310ISSUE 2 - MARCH 200413S E M I C O N D U C T O R SSTDN VCC Gnd ISENSEVDRIVE 12345Top ViewPINOUT DIAGRAMPin No.Name Description1V CC Supply voltage,generally Alkaline,NiMH or NiCd single cell2G nd Ground 3S TDN Shutdown4I SENSE Inductor current sense input.Internal threshold voltage set to 19mV.Connect external sense resistor 5V DRIVEDrive output for external switching transistor.Connect to base ofexternal switching transistor.PIN DESCRIPTIONS(NOTES)S E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 200414ZXSC310 (NOTES)ISSUE 2 - MARCH 200415S E M I C O N D U C T O R SS E M I C O N D U C T O R SZXSC310ISSUE 2 - MARCH 200416SCZXSC310DS1EuropeZetex GmbHStreitfeldstraße 19D-81673 München GermanyTelefon: (49) 89 45 49 49 0Fax: (49) 89 45 49 49 49**********************AmericasZetex Inc700 Veterans Memorial Hwy Hauppauge, NY 11788USATelephone: (1) 631 360 2222Fax: (1) 631 360 8222*******************Asia PacificZetex (Asia) Ltd3701-04Metroplaza Tower 1Hing Fong Road, Kwai Fong Hong KongTelephone: (852) 26100 611Fax: (852) 24250 494********************Corporate Headquaters Zetex plcFields New Road,Chadderton Oldham, OL9 8NP United KingdomTelephone (44) 161 622 4444Fax: (44) 161 622 4446************These offices are supported by agents and distributors in major countries world-wide.This publication is issued to provide outline information only which (unless agreed by the Company in writing)may not be used,applied or reproduced for any purpose or form part of any order or contract or be regarded as a representation relating to the products or services concerned.The Company reserves the right to alter without notice the specification, design, price or conditions of supply of any product or service.For the latest product information,log on to ©Zetex plc 2004DIMMillimeters InchesMINMAX MIN MAX A 0.90 1.450.0350.057A10.000.150.000.006A20.90 1.30.0350.051b 0.350.500.0140.020C 0.090.200.00350.008D 2.80 3.000.1100.118E 2.60 3.000.1020.118E1 1.501.750.0590.069e 0.95 REF 0.037 REF e1 1.90 REF 0.075 REF L 0.100.600.0040.024a°1010SOT23-5PACKAGE DIMENSIONSSOT23-5PACKAGE OUTLINE。
高超声速飞行器鲁棒自适应控制律设计

Ab s t r a c t : A n e w k i n d o f r o b u s t a d a p t i v e c o n t r o l l me t h o d i s p r o p o s e d f o r h y p e r s o n i c v e h i c l e w i t h s t r o n g c o u p l e d
中图分类号 :V 1 9 文献标识码 :A 文章编号 :1 0 0 0 — 1 3 2 8 ( 2 0 1 3 ) 0 3 - 0 3 8 4 - 0 5
DO I : 1 0 . 3 8 7 3 / j . i s s n . 1 0 0 0 - 1 3 2 8 . 2 0 1 3 . 0 3 . 0 1 3
e q u a t i o n .F i n a l l y ,a n i l l u s t r a t i v e e x a mp l e i s g i v e n t o s h o w t h e p r o p o s e d c o n t r o l s c h e me c a n g u a r a n t e e t h e s t a b i l i t y o f t h e h y p e r s o n i c v e h i c l e u n d e r t h e c o n d i t i o n o f l a r g e — s c a l e v a ia r t i o n o f mo d e l p a r a me t e r p e tu r r b a t i o n a n d d i s t u r b a n c e . Ke y wo r d s : Hy p e r s o n i c v e h i c l e ;Ro b u s t ;Ad a p t i v e ;No n - ma t c h;Ri c c a t i e q u a t i o n
贝乐斯泰坦尼克号的瓮模型
泰坦尼克号的瓮模型2012年04月16日10:59分类:标签:阅读:3,939评论:瓮模型(Urn Model):一个瓮中最初有黑白球若干。
从中任意拿出一个球,如果是黑球就把原来的球放回去,并再加一个黑球进去。
如果是白球就把原来的球放回去,并再加一个白球进去。
一段时间后,黑白球的比例趋于稳定。
但是,黑球与白球的最终比例与初始比例无关,而与开始阶段取出的黑白球的随机状况有关。
在这个实验最开始的时候,所有的可能性都是并存的。
进程开始时,最初拿出来的黑白球比例完全是随机的。
加入同颜色的球是一种模仿行为,具有正反馈的效果。
随着进程的演变,这种正反馈,逐渐强化并固化了最初的随机状态,把进程变成了一个不可逆过程,最终进入稳定状态。
最后,一个颜色的球占总数的比例可以是0和100%之间的任意一个数。
在股票市场,相互模仿造成的羊群效应非常明显。
资产价格就是非常明显的信号,其变化能影响众多模仿者的行为。
当股市正常时,市场参与者意见迥异,有买有买,形成市场的正常流动。
这种内在的平衡机制类似于负反馈,让股市围绕基本面上下波动,但最终仍然追寻基本面发展的方向。
由于影响股市的诸多因素是随机的,股市的变化也是随机的,股市无法预测。
而当股市的变化(如超指数的增长/下跌)触发了模仿者的正反馈行为,则随机的变化被正反馈所强化,股市就进入了受羊群效应驱动的模式。
这时候,股价可能背离基本面很远,而且保持很长的时间。
这就是凯恩斯所说的“市场能保持非理性很长时间,长到超过你能保持偿付能力而不破产的时间。
”这时候的市场不再有效,市场的行为虽然疯狂,但变得可以预测。
研究表明,股市仅在约%的时间里处于无效的泡沫状态。
而泡沫,尤其是上涨型泡沫的形成、发展、成熟、破灭并不是一个转瞬即逝的短暂过程。
比如著名的1987年股灾其实就是一个资产泡沫的剧烈破灭,而这个泡沫的最初形成要追溯到1983年底,1984年初。
这个影响深远的资产泡沫,其形成、发展、成熟、破灭的过程历时三年十个月。
SGM321 SGM358 SGM324 1MHz, 60μA, Rail-to-Rail I O

SGM321/SGM358/SGM3241MHz, 60μA, Rail-to-Rail I/OCMOS Operational Amplifiers GENERAL DESCRIPTIONThe SGM321 (single), SGM358 (dual) and SGM324(quad) are low cost, rail-to-rail input and output voltagefeedback amplifiers. They have a wide input commonmode voltage range and output voltage swing, and takethe minimum operating supply voltage down to 2.1V.The maximum recommended supply voltage is 5.5V.All are specified over the extended -40℃to +85℃temperature range.The SGM321/358/324 provide 1MHz bandwidth at alow current consumption of 60μA/amplifier. Very lowinput bias currents of10pA enable SGM321/358/324 tobe used for integrators, photodiode amplifiers andpiezoelectric sensors. Rail-to-rail input and output areuseful to designers for buffering ASIC in single-supplysystems.Applications for this series of amplifiers include safetymonitoring, portable equipment, battery and powersupply control, and signal conditioning and interfacingfor transducers in very low power systems.The SGM321 is available in Green SOT-23-5 andSC70-5 packages. The SGM358 is available in GreenSOIC-8, MSOP-8 and DIP-8 packages. The SGM324 isavailable in Green SOIC-14 and TSSOP-14 packages.FEATURES•Low Cost•Rail-to-Rail Input and Output•Input Offset Voltage: 5mV (MAX)•Unity Gain Stable•Gain-Bandwidth Product: 1MHz•Very Low Input Bias Current: 10pA•Supply Voltage Range: 2.1V to 5.5V•Input Voltage Range:-0.1V to 5.6V with V S = 5.5V•Low Supply Current: 60μA/Amplifier•Small Packaging:SGM321 Available in SOT-23-5 and SC70-5SGM358 Available in SOIC-8, MSOP-8 and DIP-8SGM324 Available in SOIC-14 and TSSOP-14APPLICATIONSASIC Input or Output AmplifierSensor InterfacePiezoelectric Transducer AmplifierMedical InstrumentationMobile CommunicationAudio OutputPortable SystemSmoke DetectorNotebook PCPCMCIA CardBattery-Powered EquipmentDSP InterfacePACKAGE/ORDERING INFORMATIONMODELPACKAGE DESCRIPTIONSPECIFIED TEMPERATURERANGE ORDERING NUMBER PACKAGE MARKINGPACKING OPTION SGM321SC70-5-40℃ to +85℃ SGM321YC5/TR 321 Tape and Reel, 3000 SOT-23-5 -40℃ to +85℃ SGM321YN5/TR 321 Tape and Reel, 3000 SOT-23-5 -40℃ to +85℃ SGM321BYN5/TR 321B Tape and Reel, 3000 SGM358SOIC-8-40℃ to +85℃ SGM358YS/TR SGM358YS XXXXX Tape and Reel, 4000 MSOP-8 -40℃ to +85℃ SGM358YMS/TR SGM358 YMS XXXXX Tape and Reel, 3000 DIP-8 -40℃ to +85℃ SGM358YP SGM358YP XXXXX 20 Tube (1000pcs) SGM324SOIC-14-40℃ to +85℃SGM324YS14/TRSGM324YS14 XXXXX Tape and Reel, 2500 TSSOP-14-40℃ to +85℃SGM324YTS14/TRSGM324 YTS14 XXXXXTape and Reel, 3000MARKING INFORMATIONNOTE: XXXXX = Date Code and Vendor Code.Date Code - Week Vendor CodeDate Code - YearX XX X XGreen (RoHS & HSF): SG Micro Corp defines "Green" to mean Pb-Free (RoHS compatible) and free of halogen substances. If you have additional comments or questions, please contact your SGMICRO representative directly.ABSOLUTE MAXIMUM RATINGSSupply Voltage, +V S to -V S ................................................. 6V Input Common Mode Voltage Range .................................................... (-V S ) - 0.3V to (+V S ) + 0.3V Package Thermal Resistance @ T A = +25℃ SC70-5, θJA .............................................................. 333℃/W SOT-23-5, θJA .......................................................... 190℃/W SOIC-8, θJA .............................................................. 125℃/W MSOP-8, θJA ............................................................ 216℃/W Junction Temperature ................................................. +150℃ Storage Temperature Range ....................... -65℃ to +150℃ Lead Temperature (Soldering, 10s) ............................ +260℃ ESD Susceptibility HBM ............................................................................. 4000V MM ................................................................................ .400VRECOMMENDED OPERATING CONDITIONSOperating Temperature Range ....................... -40℃ to +85℃OVERSTRESS CAUTIONStresses beyond those listed in Absolute Maximum Ratings may cause permanent damage to the device. Exposure to absolute maximum rating conditions for extended periods may affect reliability. Functional operation of the device at any conditions beyond those indicated in the Recommended Operating Conditions section is not implied.ESD SENSITIVITY CAUTIONThis integrated circuit can be damaged by ESD if you don’t pay attention to ESD protection. SGMICRO recommends that all integrated circuits be handled with appropriate precautions. Failure to observe proper handling and installation procedures can cause damage. ESD damage can range from subtle performance degradation to complete device failure. Precision integrated circuits may be more susceptible to damage because very small parametric changes could cause the device not to meet its published specifications.DISCLAIMERSG Micro Corp reserves the right to make any change in circuit design, or specifications without prior notice.PIN CONFIGURATION SSGM321YN5/SGM321BYN5 (TOP VIEW)+V S-IN-V S +IN OUT+V S-IN-V S+INOUTSOT -23-5/SC70-5SOT -23-5SGM358 (TOP VIEW)OUTA -INA+INA-V S +V S -IND+IND -INB+INB -INC OUTBOUTC+INC OUTDOUTA OUTB +INB+V S-INA +INA -V S-INBSOIC -8/MSOP -8/DIP -8TSSOP -14/SOIC -14ELECTRICAL CHARACTERISTICS(At V S = +5V, R L = 100kΩ connected to V S/2, and V OUT = V S/2, unless otherwise noted.)TYPICAL PERFORMANCE CHARACTERISTICSAt T A = +25℃, V S = 5V, and R L = 100kΩ connected to V S /2, unless otherwise noted.Supply Current vs. TemperatureOpen-Loop Gain vs. TemperatureCommon Mode Rejection Ratio vs. Temperature Power Supply Rejection Ratio vs. TemperatureSupply Current vs. Supply Voltage Short-Circuit Current vs. Supply Voltage50556065707580-50-25255075100125150S u p p l y C u r r e n t /A m p l i f i e r (μA )Temperature (℃)60708090100110120-50-25255075100125150O p e n –L o o p G a i n (d B )Temperature (℃)60708090100110120-50-25255075100125150C M R R (d B )Temperature (℃)60708090100110120-50-25255075100125150P S R R (d B )Temperature (℃)0102030405060708001234567S u p p l y C u r r e n t /A m p l i f i e r (μA )Supply Voltage (V)-2002040608010012001234567S h o r t -C i r c u i t C u r r e n t (m A ) Supply Voltage (V)TYPICAL PERFORMANCE CHARACTERISTICS (continued)At T A = +25℃, V S = 5V, and R L = 100kΩ connected to V S /2, unless otherwise noted.Output Voltage Swing vs. Output CurrentOutput Voltage Swing vs. Output CurrentMaximum Output Voltage vs. Frequency CMRR and PSRR vs. FrequencyInput Voltage Noise Density vs. Frequency Open-Loop Gain and Phase vs. Frequency0123456020406080100120140160O u t p u t V o l t a g e (V )Output Current (mA)102030405060O u t p u t V o l t a g e (V )Output Current (mA)0123456110100100010000O u t p u t V o l t a ge (V p -p )Frequency (kHz)01020304050607080901000.010.1110100100010000C M R R a n d P S R R (d B )Frequency (kHz)1010010000.010.1110100Frequency (kHz)I n o u t V o l t a g e N o i s e D e n s i t y (n V /√H z )-180-150-120-90-60-300-40-20020*******.1110100100010000P h a s e (D e g r e e )O p e n -L o o p G a i n (d B )Frequency (kHz)TYPICAL PERFORMANCE CHARACTERISTICS (continued)At T A = +25Small-Signal Overshoot vs. Load CapacitanceSmall-Signal Step ResponseLarge-Signal Step ResponseTime (2μs/div)Time (10μs/div)Overload Recovery Time2.5V0V500mV0VTime (2μs/div)010203040506010100100010000S m a l l -S i g n a l O v e r s h o o t (%)Load Capacitance (pF)010203040506010100100010000S m a l l -S i g n a l O v e r s h o o t (%)Load Capacitance (pF)G = +1 C L = 100pF R L = 100k ΩG = +1 C L = 100pF R L = 100k ΩO u t p u t V o l t a g e (20m V /d i v )O u t p u t V o l t a g e (500m V /d i v )V S= 5VG = -5V IN = 500mVAPPLICATION NOTESDriving Capacitive LoadsThe SGM321/SGM358/SGM324 can directly drive 250pF in unity-gain without oscillation. The unity-gain follower (buffer) is the most sensitive configuration to capacitive loading. Direct capacitive loading reduces the phase margin of amplifiers and this results in ringing or even oscillation. Applications that require greater capacitive driving capability should use an isolation resistor between the output and the capacitive load like the circuit in Figure 1. The isolation resistor R ISO and the load capacitor C L form a zero to increase stability. The bigger the R ISO resistor value, the more stable V OUT will be. Note that this method results in a loss of gain accuracy because R ISO forms a voltage divider with the R LOAD.V IN V OUTFigure 1. Indirectly Driving Heavy Capacitive LoadAn improved circuit is shown in Figure 2. It provides DC accuracy as well as AC stability. R F provides the DC accuracy by connecting the inverting input with the output. C F and R ISO serve to counteract the loss of phase margin by feeding the high frequency component of the output signal back to the amplifier’s inverting input, thereby preserving phase margin in the overall feedback loop.VOUTFigure 2. Indirectly Driving Heavy Capacitive Load withDC Accuracy For non-buffer configuration, there are two other ways to increase the phase margin: (a) by increasing the amplifier’s closed-loop gain or (b) by placing a capacitor in parallel with the feedback resistor to counteract the parasitic capacitance associated with inverting node.Power Supply Bypassing and LayoutThe SGM321/SGM358/SGM324 can operate from either a single 2.1V to 5.5V supply or dual ±1.05V to ±2.75V supplies. For single-supply operation, bypass the power supply +V S with a 0.1µF ceramic capacitor which should be placed close to the +V S pin. For dual-supply operation, both the +V S and the -V S supplies should be bypassed to ground with separate 0.1µF ceramic capacitors. 2.2µF tantalum capacitor can be added for better performance.V NV PSV NV P-V S (GND)Figure 3. Amplifier with Bypass CapacitorsTYPICAL APPLICATION CIRCUITS Differential AmplifierThe circuit shown in Figure 4 performs the difference function. If the resistor ratios are equal (R4/R3 = R2/R1), then V OUT = (V P - V N) × R2/R1 + V REF.V NV PV OUTFigure 4. Differential AmplifierInstrumentation AmplifierThe circuit in Figure 5 performs the same function as that in Figure 4 but with a high input impedance.V NV PV OUT Figure 5. Instrumentation Amplifier Active Low-Pass FilterThe low-pass filter shown in Figure 6 has a DC gain of (-R2/R1) and the -3dB corner frequency is 1/2πR2C. Make sure the filter bandwidth is within the bandwidth of the amplifier. Feedback resistors with large values can couple with parasitic capacitance and cause undesired effects such as ringing or oscillation in high-speed amplifiers. Keep resistor values as low as possible and consistent with output loading consideration.VV OUTFigure 6. Active Low-Pass FilterREVISION HISTORYNOTE: Page numbers for previous revisions may differ from page numbers in the current version.APRIL 2019 ‒ REV.E.1 to REV.E.2 Page Added Open-Loop Gain and Phase vs. Frequency (6)MARCH 2017‒ REV.E to REV.E.1 Page Updated Package/Ordering Information section (2)NOVEMBER 2015 ‒ REV.D.4to REV.E Page Updated Packing Option of DIP-8 (2)Updated SOIC-14 and TSSOP-14 packages ............................................................................................................................................... 14, 15 JANUARY 2013 ‒ REV.D.3to REV.D.4 Page Added Tape and Reel Information section ................................................................................................................................................... 16, 17PACKAGE OUTLINE DIMENSIONS SOT-23-5Symbol Dimensions In Millimeters Dimensions In Inches MIN MAX MIN MAX A 1.050 1.250 0.041 0.049 A1 0.000 0.100 0.000 0.004 A2 1.050 1.150 0.041 0.045 b 0.300 0.500 0.012 0.020 c 0.100 0.200 0.004 0.008 D 2.820 3.020 0.111 0.119 E 1.500 1.700 0.059 0.067 E1 2.6502.9500.1040.116e 0.950 BSC 0.037 BSC e1 1.900 BSC 0.075 BSC L 0.300 0.600 0.0120.024 θ0°8°0°8°RECOMMENDED LAND PATTERN (Unit: mm)PACKAGE OUTLINE DIMENSIONS SC70-5Symbol Dimensions In Millimeters Dimensions In Inches MIN MAX MIN MAX A 0.900 1.100 0.035 0.043 A1 0.000 0.100 0.000 0.004 A2 0.900 1.000 0.035 0.039 b 0.150 0.350 0.006 0.014 c 0.080 0.150 0.003 0.006 D 2.000 2.200 0.079 0.087 E 1.150 1.350 0.045 0.053E1 2.1502.4500.0850.096e 0.65 TYP 0.026 TYP e1 1.300 BSC 0.051 BSC L 0.525 REF 0.021 REF L1 0.260 0.460 0.010 0.018 θ0°8° 0°8°RECOMMENDED LAND PATTERN (Unit: mm)PACKAGE OUTLINE DIMENSIONS SOIC-8Symbol Dimensions In Millimeters Dimensions In Inches MIN MAX MIN MAX A 1.350 1.750 0.053 0.069 A1 0.100 0.250 0.004 0.010 A2 1.350 1.550 0.053 0.061 b 0.330 0.510 0.013 0.020 c 0.170 0.250 0.006 0.010 D 4.700 5.100 0.185 0.200 E 3.800 4.000 0.150 0.157 E1 5.8006.2000.228 0.244 e 1.27 BSC0.050 BSCL 0.400 1.270 0.016 0.050 θ0°8° 0°8°RECOMMENDED LAND PATTERN (Unit: mm)PACKAGE OUTLINE DIMENSIONS MSOP-8Symbol Dimensions In Millimeters Dimensions In Inches MIN MAX MIN MAX A 0.820 1.100 0.032 0.043 A1 0.020 0.150 0.001 0.006 A2 0.750 0.950 0.030 0.037 b 0.250 0.380 0.010 0.015 c 0.090 0.230 0.004 0.009 D 2.900 3.100 0.114 0.122 E 2.900 3.100 0.114 0.122 E1 4.750 5.050 0.187 0.199 e 0.650 BSC 0.026 BSCL 0.400 0.800 0.016 0.031θ0°6°0°6°cRECOMMENDED LAND PATTERN (Unit: mm)PACKAGE OUTLINE DIMENSIONS SOIC-14Symbol Dimensions In Millimeters Dimensions In Inches MIN MAX MIN MAX A 1.35 1.75 0.053 0.069 A1 0.10 0.25 0.004 0.010 A2 1.25 1.65 0.049 0.065 A3 0.55 0.75 0.022 0.030 b 0.36 0.49 0.014 0.019 D 8.53 8.73 0.336 0.344 E 5.80 6.20 0.228 0.244 E1 3.804.000.150 0.157 e 1.27 BSC 0.050 BSCL 0.450.80 0.0180.032L1 1.04 REF 0.040 REF L2 0.25 BSC 0.01 BSCR 0.07 0.003 R1 0.07 0.003 h 0.30 0.50 0.012 0.020 θ0°8° 0°8°RECOMMENDED LAND PATTERN(Unit: mm)PACKAGE OUTLINE DIMENSIONS TSSOP-14Symbol Dimensions In Millimeters DimensionsIn Inches MIN MAX MIN MAX A 1.200 0.047 A1 0.050 0.150 0.002 0.006 A2 0.800 1.050 0.031 0.041 b 0.190 0.300 0.007 0.012 c 0.090 0.200 0.004 0.008 D 4.860 5.100 0.1910.201 E 4.300 4.500 0.169 0.177 E1 6.250 6.550 0.246 0.258 e 0.650 BSC 0.026 BSCL 0.5000.7000.020.028H 0.25 TYP 0.01 TYP θ1°7° 1°7°RECOMMENDED LAND PATTERN (Unit: mm)PACKAGE OUTLINE DIMENSIONS DIP-8Symbol Dimensions In Millimeters Dimensions In Inches MIN MAX MIN MAX A 3.710 4.310 0.146 0.170 A1 0.510 0.020 A2 3.200 3.600 0.126 0.142 b 0.380 0.570 0.015 0.022 b1 1.524 BSC 0.060 BSCc 0.204 0.360 0.008 0.014 D 9.000 9.400 0.354 0.370 E 6.200 6.600 0.244 0.260 E1 7.320 7.920 0.288 0.312 e 2.540 BSC 0.100 BSCL 3.000 3.600 0.118 0.142 E28.4009.0000.3310.354TAPE AND REEL INFORMATIONNOTE: The picture is only for reference. Please make the object as the standard.KEY PARAMETER LIST OF TAPE AND REELPackage Type Reel DiameterReel WidthW1(mm)A0(mm)B0 (mm) K0 (mm) P0 (mm) P1 (mm) P2 (mm) W (mm) Pin1 QuadrantDD0001SOT-23-5 7″ 9.5 3.20 3.20 1.40 4.0 4.0 2.0 8.0Q3 SC70-5 7″ 9.5 2.25 2.551.20 4.0 4.02.0 8.0 Q3 SOIC-8 13″ 12.4 6.40 5.40 2.10 4.0 8.0 2.0 12.0 Q1 MSOP-8 13″ 12.4 5.203.30 1.504.0 8.0 2.0 12.0 Q1 SOIC-14 13″ 16.4 6.60 9.30 2.10 4.0 8.0 2.0 16.0 Q1TSSOP-1413″12.46.955.601.204.08.02.012.0Q1REEL DIMENSIONS TAPE DIMENSIONS DIRECTION OF FEEDCARTON BOX DIMENSIONSNOTE: The picture is only for reference. Please make the object as the standard. KEY PARAMETER LIST OF CARTON BOXReel Type Length(mm) Width(mm)Height(mm) Pizza/CartonDD00027″ (Option)368 227 224 8 7″442 410 224 18 13″386 280 370 5。
GAM 零回波与机器人扁平减速器说明书
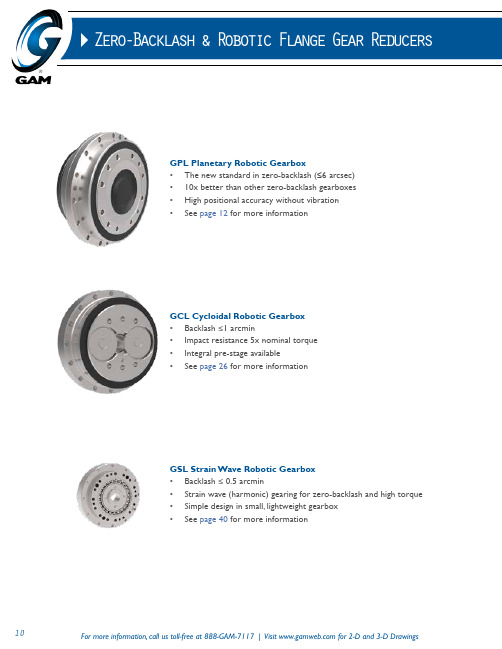
Z e r o-B a c k l a s h&R o b o t i c F l a n g e G e a r R e d u c e r sGPL Planetary Robotic Gearbox• The new standard in zero-backlash (≤6 arcsec)• 10x better than other zero-backlash gearboxes• High positional accuracy without vibration• See page 12 for more informationGCL Cycloidal Robotic Gearbox• Backlash ≤1 arcmin• Impact resistance 5x nominal torque• Integral pre-stage available• See page 26 for more informationGSL Strain Wave Robotic Gearbox• Backlash ≤ 0 .5 arcmin• Strain wave (harmonic) gearing for zero-backlash and high torque• Simple design in small, lightweight gearbox• See page 40 for more informationEPL SPH GCL GSL GPLG P L S e r i e s R o b o t i c P l a n e t a r y G e a r b o x e sFeaturesBenefitsZero Backlash ≤ 0.1 arcmin Highest precision for your application Lowest lost motion ≤ 0.6 arcmin High torsional rigiditySuperior accuracy even with low torquePatented self-adjusting backlash system Constant precision throughout the entire lifetime High torque density 58-73 Nm/kg Smaller gearbox, lighter overall system Fully-loaded life 20,000 operating hours Longer lifetime, reduced maintenance costs Efficiency > 90%Lower power consumption, smaller motor Quiet < 70 dBReduced workplace noise exposure High output, acceleration and emergency stop torqueMore security for your application Superior tilting and torsional stiffness Allows precise positioning Low vibrationHigh repeatabilityLowest breakaway torque Better control of the overall system Standard mineral oil Reduced lubrication costLow operating temperature Longer component and lubricant life Low moment of inertia Excellent dynamic performance Compact design, low weightLighter overall design Input with Integrated motor adapter and clampReady to mount your motorRobotic Planetary GearboxesGAM’s GPL Series Robotic Planetary Gearboxes provide the lowest backlash and high tilting rigidity for horizontal and vertical robotic and motion control applications .• With a backlash of ≤ 0.1 arcmin, the GPL Series can be considered a zero backlash gearbox• Best-in-the-market torsional rigidity for ≤ 0.6 arcmin lost motion • Patented design guarantees the backlash will not increase over the life time of the gearbox• Industry-accepted proven performance• Seven sizes with nominal output torque of 445 to 3505 Nm and ratios of 50:1 to 200:1• Flanged solid shaft output or flanged hollow shaft output (up to 75 mm through hole)• Integrated motor adapter plate ready to mount your motor • GPR with right angle input available - contact GAMWith seven sizes, two output options, and ratios up to 200:1, there is a GPL for your application .Integrated helical input stage for high input ratios and high input speedsPlanetary 2nd stageConical Spur Gear Zero-backlash 3rd stageMain Bearingsupports high external loadsGround gears for lowestbacklash with high repeatability, low noise and high transmission accuracyOutput flange for high torsional and tilting stiffnessApplicationsThe GPL Series can be used in a variety of applications where zero-backlash, high tilting and tor-sional rigidity, and long life are required. With the large output mounting flange, through-hole op -tion, and servo-ready mount, the GPL is ideal for many robotic and motion control applications:• Robots• Handling systems • T ool changers • Positioning• Rack & pinion • Pick & place • T urntables• and many moreIndustriesThe GPL Series is ideal for many industries including:• Robotics • Automation • Packaging Machines • Machine tool builders • T urntables• Printing industry• Welding Systems • Medical • Navigation • and many morewith GPL Planetary Gearbox in the baseurntableG P L S e r i e s R o b o t i c P l a n e t a r y G e a r b o x e sGPL-HG P L -FG P L -056 D i m e n s i o n sGPL-F-056GPL-H-056depending on motordepending on motorG P L -112 D i m e n s i o n sGPL-F-112GPL-H-112depending on motordepending on motorG P L -224 D i m e n s i o n sGPL-F-224GPL-H-224*Dimension may vary depending on motordepending on motorG P L -400 D i m e n s i o n sGPL-F-400GPL-H-400depending on motordepending on motorG C L S e r i e s R o b o t i c C y c l o i d a l G e a r b o x esRobotic Cycloidal GearboxesGAM’s GCL Series Robotic Cycloidal Gearboxes provide low backlash and high rigidity for horizontal and vertical robotic and motion control applications .• Backlash of ≤1 arcmin with lost motion of ≤1 arcmin• Withstands the frequent start-stop impact loads of industrial robots with impact resistance 5x nominal torque • Multi-tooth meshing for torsional rigidity • Planetary gear for input speed reduction• Flange output in 7 sizes with nominal output torque of 167 to 4410 Nm and ratios of 57:1 to 192 .4:1• Flanged hollow output in 6 sizes (up to 138 mm through hole) with nominal output torque of 490 to 4900 Nm • Drops in for many competitors’ products•Integrated motor adapter plate ready to mount your motor11234657GCLC-F GCLC-H GCL-F IntegratedG C L C -F / G C L -F160320*320400G C L C -F / G C L -F G e a r b o x D i m e n s i o n sGCLC-F-020GCLC-F-080G C L C -F / G C L -F G e a r b o x D i m e n s i o n sGCLC-F-160G C L C -F / G C L -F G e a r b o x D i m e n s i o n sFor more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings36GCLC-H-050G C L -H G e a r b o x D i m e n s i o nsGCLC-H-120For more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings38GCLC-H-400mating componentGCLC-H-500G C L -H G e a r b o x D i m e n s i o n sInput: Pinion O utput: Flange Fixed: Housing Ratio: RInput: Pinion O utput: Housing Fixed: Flange Ratio: R-1HousingPinion Shaft FlangeInput: Pinion O utput: Flange Fixed: Housing Ratio: RInput: Pinion O utput: Housing Fixed: Flange Ratio: R-1HousingPinion Shaft FlangeRobotic Strain Wave GearboxesGAM’s GSL Series Robotic Strain Wave Gearboxes provide zero-backlash and high torque in a small, lighweight gearbox .• Backlash of ≤0.5 arcmin (≤30 arcsec)• High repeatability and positional accuracy for fine positioning • High reduction ratios in a single stage: 50:1 to 160:1• Simple design for integration into housing or machine • High torque density with low inertia• Drops in for popular competitor gearboxesStrain Wave Operating PrincipleS train wave gear reducers have three basic components:Wave GeneratorMade up of an elliptical cam and a ball bearing. It is usually attached to the driving component. The inner ring of the bearing is fixed around the cam causing the bearing to deform to an elliptical shape.transmitting torque. Most commonly the output component Circular SplineRigid steel ring with internal teeth. It has 2 more teeth than the flexspline. Most commonly the fixed component.Operation1. The W ave Generator mounts inside the Flexspline forcing the Flexspline into an elliptical shape.2. The Flexspline teeth engage the Circular Spline teeth along the major axis of the ellipse of theWave Generator. The Flexspline has two fewer teeth than the Circular Spline.3. The rotation of the Wave Generator continuously deforms the Flexspline resulting in the teeth engaging and disengaging the teeth of the Circular Spline, rotating the Flexspline in theopposite direction4.As the Wave Generator moves through 360°, since the Flexspline has two fewer teeth it “runsout” of teeth to engage with the Circular Spline before it gets to the first tooth and so moves two teeth in the opposite direction of the Wave Generator. 5. The distance (degrees) the Flexspline rotates depends on the reduction ratio: at 50:1 it moves360/50 or 7.2°At Input 0°: Output at 0°At Input 90° rotation clockwise: Output has rotated ½ tooth counter-clockwiseAt Input 360° rotation clockwise: Output has rotated 2 teeth counter-clockwiseG S L S t r a i n W a v e R o b o t i c G e a r b o x• Low Profile• Small diameterGSL-CS-A/BGSL-HT GSL-HS-A/BGSL-HS-CGSL-HS-D GSL-HS-EG S L G e a r b o x M o d e l sGSL-HS-A/BGSL-HS-DGSL-HTG S L G e a r b o x T e c h n i c a l S p e c i f i c a t i o n sG S L -C S -A G e a r b oxGSL-CS-A• Keyed or set screw input • Cup-style flexspline • Frame sizes 014-032G S L -C S -B G e a r b oxGSL-CS-B• Keyed or set screw input• Oldham’s coupling accomodates slight parallel misalignment • Cup-style flexspline • Frame sizes 014-032For more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings50GSL-HS-A• Keyed or set screw input • Hat-style flexspline • Frame sizes 014-032For more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings52GSL-HS-B• Keyed or set screw input• Oldham’s coupling accomodates slight parallel misalignment • Hat-style flexspline • Frame sizes 014-032For more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings54GSL-HS-C• Hollow shaft input • Hat-style flexspline • Frame sizes 014-040For more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings56GSL-HS-D • S haft input• Hat-style flexspline • Frame sizes 014-032For more information, call us toll-free at 888-GAM-7117 | Visit for 2-D and 3-D Drawings58GSL-HS-E• Includes output bearing but no housing for more complete integration where other GSL gearboxes don’t fit • Hollow shaft input • Hat-style flexspline • Frame sizes 014-032。
特斯拉电动汽车(英文版)
Company profile
tesla's motor company, a company in the production and sale of electric vehicles and parts, manufacturing pure electric vehicles, was founded in 2003, is headquartered in the silicon valley, California, USA.Its founder, Martin, ahab is a silicon valley engineer, senior fans, and investors are capsules, Paypal founder elon musk.Tesla motors is the world's first use of lithium ion battery electric vehicle co., LTD.Tesla's electric car industry leader, main motor and a perfect fusion of modern high-tech is shaken the epoch-making milestone, tesla Model S sedan has surpassed the technical specifications of the many fuel cars.
Thank you for watching
Tesla Model’S parameter
Working principle: battery-electric current-power regulator-motor-power transmission system-drive the car (Roab)
基于星-凸形随机超曲面模型的扩展目标GM-PHD滤波器
基于星-凸形随机超曲面模型的扩展目标GM-PHD滤波器魏帅;冯新喜;王泉【摘要】A Gaussian mixture PHD filter for extended target tracking based on star-convex random hypersurface model was proposed for the problem of joint estimation of the extended target shape and motion state.The proposed algorithm modelled the diffusion degree of measuration by using the star-convex random hypersurface model.Then,the extended targets were tracked by calculating and updating the measurement likelihood and innovation under the Gaussian mixture probability hypothesis density framework.The simulation results showed that the proposed method could guarantee the tracking availability and feasibility and improve the estimated accuracy of extended target motion state as well as the target shape.%针对扩展目标联合估计运动状态和目标外形的问题,提出一种基于星-凸形随机超曲面模型的扩展目标高斯混合概率密度滤波算法.该算法利用星-凸随机超曲面模型对量测的扩散程度进行建模,在高斯混合概率假设密度的框架下,通过求解、更新递推量测模型下的量测似然、新息等参数来实现对扩展目标的跟踪.仿真实验表明,该算法在保证跟踪有效性和可行性的同时,提高了对扩展目标运动状态和目标外形的估计精度.【期刊名称】《弹箭与制导学报》【年(卷),期】2017(037)001【总页数】6页(P147-152)【关键词】星-凸形;随机超曲面模型;扩展目标;高斯混合概率密度【作者】魏帅;冯新喜;王泉【作者单位】空军工程大学信息与导航学院,西安 710077;空军工程大学信息与导航学院,西安 710077;空军工程大学信息与导航学院,西安 710077【正文语种】中文【中图分类】TN953近年来,随着传感器分辨率的不断提高以及目标与传感器距离的不断缩小,扩展目标的跟踪问题已成为跟踪领域的研究热点[1-4]。
TecQuipment AF300 间歇超声风洞说明书
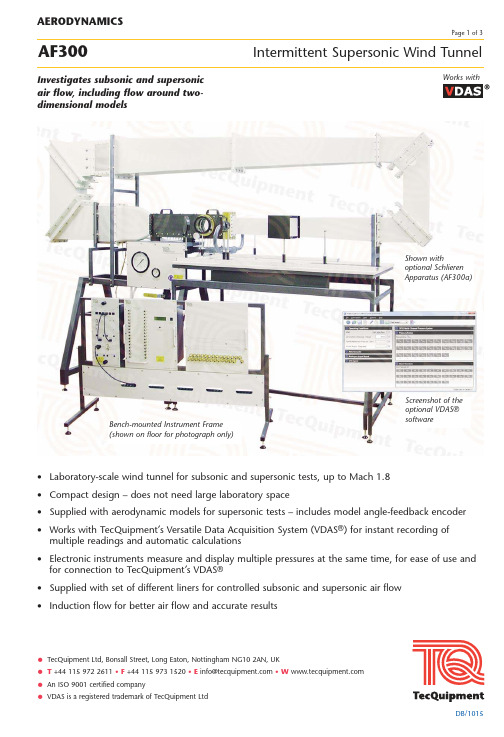
•TecQuipment Ltd, Bonsall Street, Long Eaton, Nottingham NG10 2AN, UKInvestigates subsonic and supersonic air flow, including flow around two-dimensional models•Laboratory-scale wind tunnel for subsonic and supersonic tests, up to Mach 1.8•Compact design – does not need large laboratory space•Supplied with aerodynamic models for supersonic tests – includes model angle-feedback encoder •Works with TecQuipment’s Versatile Data Acquisition System (VDAS ®) for instant recording of multiple readings and automatic calculations •Electronic instruments measure and display multiple pressures at the same time, for ease of use and for connection to TecQuipment’s VDAS ®•Supplied with set of different liners for controlled subsonic and supersonic air flow •Induction flow for better air flow and accurate resultsWorks withShown withoptional Schlieren Apparatus (AF300a)Bench-mounted Instrument Frame (shown on floor for photograph only)Screenshot of the optional VDAS®softwareDescriptionAn intermittent operation, induction-type supersonic wind tunnel for investigations into subsonic and supersonic flow. This includes tests on the flow around two-dimensional models at subsonic and supersonic air speeds.A compressed air supply (AF300b, available separately) induces a flow in the working section of the wind tunnel. This gives a less turbulent and more stable flow for accurate results and comparison with theory. The optional compressed air supply includes filters and air dryers to give a dust-free and dry air source needed for good results. Students use a delivery valve to allow compressed air to enter the wind tunnel. The wind tunnel includes two analogue pressure gauges. One measures the compressed air pressure available from the supply (for reference); the other measures the pressure delivered to the wind tunnel and includes an electronic transducer that connects to TecQuipment’s optional Versatile Data Acquisition System (VDAS®) to record the pressure.The working section of the wind tunnel is a convergent-divergent nozzle with a removable top part (‘liner’). The shape of the liner controls the maximum air velocity at the divergent part of the working section. Included are three different liners.High optical-quality glass windows (‘portals’) are at each side of the divergent part of the working section. The portals allow students to use the optional Schlieren Apparatus (AF300a, available separately). This allows display and recording of images of pressure waves around two-dimensional models.Included is a set of two-dimensional models. These mount between the portals inside the working section. Students can adjust the angle of the models. An encoder electronically measures the model angle.Spaced at precise intervals along the working section of the wind tunnel are pressure tappings. Two extra tappings connect to one of the models when in use. A 32-way pressure display (included) connects to all the pressure tappings. It displays the pressures and transmits them to VDAS® for instant recording and calculations of pressure ratios and Mach numbers.Included is a bench-mounting instrument frame that holds and provides power for the electronic instruments and the optional VDAS® interface unit. The instrument frame connects to a suitable electrical supply.VDAS® allows accurate real-time data capture, monitoring, display, calculation and charting of all the important readings on a suitable computer (computer not included). Standard Features•Supplied with comprehensive user guide•Five-year warranty•Manufactured in accordance with the latest European Union directives Experiments•Pressure distribution along a convergent/divergent (Laval) nozzle with subsonic and supersonic air flow •Comparison of theoretical and actual pressure distribution•Comparison of actual and theoretical area ratio of a nozzle at supersonic air velocities (Mach numbers)•Pressures around a two-dimensional model in subsonic and supersonic flow conditions, at different angles ofincidence•Lift coefficient for aerodynamic models in supersonic flow•Shock waves and expansion patterns around a two-dimensional model in supersonic flow conditions (when used with the optional Schlieren Apparatus).Recommended Ancillaries•Schlieren Apparatus AF300a•Air Compressor Receiver and Dryer AF300bEssential Ancillaries•Versatile Data Acquisition System - Frame-mounted version (VDAS-F)Essential ServicesElectrical supply:50 Hz to 60 Hz 90 VAC to 250 VAC for the AF300 Instrument Frame. ‘See specifications’ for AF300b.Air supply:Greater than 7 bar and 0.5 kg.s–1of clean, dry air, or use the optional AF300b.The air supply must not contain more than 0.2 kg of water for 450 kg of air.Floor space needed:4 m x 2 m for the wind tunnel and optional Schlieren Apparatus (AF300a)5 m x 3 m for the wind tunnel with the optional Compressed Air Supply (AF300b)Operating ConditionsOperating environment:Laboratory environment that allows for high sound levelsStorage temperature range:–25°C to +55°C (when packed for transport)Operating temperature range:+5°C to +40°COperating relative humidity range:80% at temperatures < 31°C decreasing linearly to 50% at 40°C•TecQuipment Ltd, Bonsall Street, Long Eaton, Nottingham NG10 2AN, UK•TecQuipment Ltd, Bonsall Street, Long Eaton, Nottingham NG10 2AN, UKSound LevelsThis equipment emits sound levels greater than 100 dB(A). You must wear ear defenders when you use it or work near to it.Specifications – AF300Dimensions and weight (wind tunnel):Nett: 2000 mm high x 3031 mm long x 805 mm wide and 236 kgPacked: Approximately 5.9 m 3and 300 kgDimensions and weight (instrument frame without instruments):Nett: 1260 mm long x 840 mm high x 510 mm wide and 22 kgPacked: Approximately 0.78 m 3and 30 kg Nominal nett dimensions (AF300b):2120 mm high x 4500 mm x 1000 mm Working section:Nominal 100 mm x 25 mm Liners:Subsonic, Mach 1.4 and Mach 1.8Models:•5-degree single wedge •7-degree double wedge •10-degree double wedge•10-degree double wedge with two pressure tappings.Instruments:•Angle encoder input board for VDAS-F •Angle encoder•32-way pressure display •Pressure mimic module•Delivery pressure – mechanical gauge and electronic transducer •Supply pressure – mechanical gaugeSpecifications – AF300b•Three air receivers/reservoirs – one receiver has its own inlet and outlet isolation valves to give a choice of operating time and pressure recharge rate •Main outlet isolation valve•Maximum pressure approximately 14 bar•Compressor – rated at a nominal 15 kW total electrical power, needing 32 A at 400-440 VAC three phase with earth. Voltage to be specified on order.•Air dryer and filter – rated at less than 25 W andnormally single phase. Voltage to be specified on order.58 East South Street, Rossville, IN 46065 800-251-9935**************FOR MORE INFORMATION CONTACT US!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a rXiv:h ep-th/0368v211J un23hep-th/0306080SIT-LP-03/05Linearizing superon-graviton model(SGM)Kazunari SHIMA and Motomu TSUDA Laboratory of Physics,Saitama Institute of Technology ∗Okabe-machi,Saitama 369-0293,Japan Manabu SAWAGUCHI High-Tech Research Center,Saitama Institute of Technology †Okabe-machi,Saitama 369-0293,Japan May 2003Abstract We attempt the linearization of N=1SGM action describing the nonlin-ear supersymmetric(NLSUSY)gravitational interaction of superon(Nambu-Goldstone(N-G)fermion).We find that 80+80field contents may give the off-shell supermultiplet of the supergravity(SUGRA)-like linearized theory andthey are realized explicitly up to O (ψ2)as the composites,though they have modified SUSY transformations which closes on super-Poincar´e (SP)algebra.Particular attentions are paid to the local Lorentz invariance in the minimal interaction.PACS:12.60.Jv,12.60.Rc,12.10.-g /Keywords:supersymmetry,gravity,Nambu-Goldstone fermion,composite unified theoryIn the previous paper[1]we have proposed superon-graviton model(SGM)of nature.SGM is obtained by extending the geometrical arguments of Einstein general relativity theory(EGRT)on Riemann spacetime to new(SGM)spacetime where the coset space coordinatesψi(i=1,2,···,10)of N=10superGL(4,R)16πG|w|(Ω+Λ),(1) |w|=det w aµ=det(e aµ+t aµ),t aµ=κ416πG )−1is thefundamental volume of four dimensional spacetime of V-A model[2],andΛis the small cosmological constant related to the strength of the superon-vacuum coupling constant.SGM posesses two mass scales,G−1(Planck scale)andΛV-A[2],is invertible and sµν(x)≡w aµ(x)w aν(x)are a unified vierbein and a unified metric tensor in SGM spacetime[1][6].The SGM action(1)is invariant at least under the following symmetry[7];ordinary GL(4R),the following new NLSUSY transformation;δNLψ(x)=12ǫabσabψ,δL e aµ(x)=ǫa b e bµ+κ44εabcd¯ψγ5γdψ(∂µβbc),(7)whereβab=−βba is defined byβab=ǫ2acǫ1c b−ǫ2bcǫ1c a.The commutators of two new NLSUSY transformations(3)onψ(x)and e aµ(x)are GL(4R),i.e.new NLSUSY (3)is the square-root of GL(4R);[δζ1,δζ2]ψ=Ξµ∂µψ,[δζ1,δζ2]e aµ=Ξρ∂ρe aµ+e aρ∂µΞρ,(8)whereΞµ=2i(¯ζ2γµζ1)−ξρ1ξσ2e aµ(∂[ρe aσ]).They show the closure of the algebra. SGM action(1)is invariant at least under[7][global NLSUSY]⊗[local GL(4,R)]⊗[local Lorentz],(9) which is isomorphic to SP whose single irreducible representation with N=10gives the group theoretical description of SGM[5].The linearization of such a theory with a high nonlinearity is interesting and inevitable to extract physics.From the experience of the linearization of V-A model inflat spacetime we expect that we can carry out the linearization exactly and that we can obtain an equivalent localfield theory which is renormalizable and describes the observed low energy(SM)physics.Theflat space linearization of N=1V-A model has been carried out and proved that N=1V-A model is equivalent to N=1scalar supermultiplet[8]or N=1axial vector gauge supermultiplet of linear SUSY[9].As aflat space exercise for the extended SGM linerization,we have carried out the linearization of N=2V-A model and shown that it is equivalent to the spontaneously broken N=2linear SUSY vector J P=1−gauge supermultiplet model with SU(2) structure[10].Interestingly SU(2)algebraic gauge structure of the electroweak stan-dard model(SM)may be explained for thefirst time provided that the electroweak gauge bosons are the compositefields of this(SGM)type in the low energy.In these works the linearization are carried out by using the superfield formalism and/or by the heuristic and intuitive arguments on the relations between the com-ponentfields of LSUSY and NLSUSY.In either case it is crucial to discover the SUSY invariant relations which connect the supermultiplets of L and NL theories and reproduce the SUSY transformations.In abovementioned cases of the global SUSY inflat spacetime the SUSY invari-ant relations are obtained straightforwardly,for L and NL supermultiplets are well undestood and the algebraic structures are the same SP.The situation is rather different in SGM,for(i)the supermultiplet structure of the linearized theory of SGM is unknown except it is expected to be a broken SUSY SUGRA-like theory containing graviton and a(massive)spin3/2field as dynamical d.o.f.and(ii)the algebraic structure(9)is changed into SP.Therefore by the heuristic arguments and referring to SUGRA we discuss for the moment the linearization of N=1SGM.Atfirst,we assume faithfully to SGM scenario that;(i)the linearized theory should contain the spontaneously broken global(at least) SUSY(ii)graviton is an elementaryfield(not composite of superons coresponding to the vacuum of the Clifford algebra)in both L and NL theories(iii)the NLSUSY supermultiplet of SGM(e aµ(x),ψ(x))should be connected to the composite supermultiplet(˜e aµ(e(x),ψ(x)),˜λµ(e(x),ψ(x)))for elementary graviton field and a composite(massive)spin3/2field of the SUGRA-like linearized theory.From these assumptions and following the arguments performed in theflat space cases we require that the SUGRA gauge transformation[11]with the global spinor parameterζshould hold for the supermultiplet(˜e aµ(e,ψ),˜λµ(e,ψ))of the(SUGRA-like)linearized theory,i.e.,δ˜e aµ(e,ψ)=iκ¯ζγa˜λµ(e,ψ),(10)δ˜λµ(e,ψ)=2κ˜ω(e,ψ)µabσabζ,(11)whereσab=i2ωµab(e,ψ)σab,ζis a global spinor parameter andthe variations in the left-hand side are induced by NLSUSY(3).We put the following SUSY invariant relations which connect e aµto˜e aµ(e,ψ);˜e aµ(e,ψ)=e aµ(x).(12) This relation(12)is the assumption(ii)and holds simply the metric conditions. Consequently the following covariant relation is obtained by substituting(12)into (10)and computing the variations under(3)[12];˜λµ(e,ψ)=κγaγρψ(x)∂[ρe aµ].(13) (As discussed later these should may be considered as the leading order of the expansions inκof SUSY invariant relations.The expansions terminate with(ψ)4.) Now we see LSUSY transformation induced by(3)on the(composite)supermultiplet (˜e aµ(e,ψ),˜λµ(e,ψ)).The LSUSY transformation on˜e aµbecomes as follows.The left-hand side of(10) givesδ˜e aµ(e,ψ)=δNL e aµ(x)=iκ2(¯ζγρψ(x))∂[ρe aµ](x).(14) While substituting(13)into the righ-hand side of(10)we obtainiκ2(¯ζγρψ(x))∂[ρe aµ](x)+···(extra terms).(15) These results show that(12)and(13)are not SUSY invariant relations and repro-duce(10)with unwanted extra terms which should be identified with the auxirialy fields.The commutator of the two LSUSY transformations induces GL(4R)with thefield dependent parameters as follows;[δζ1,δζ2]˜e aµ(e,ψ)=Ξρ∂ρ˜e aµ(e,ψ)+˜e aρ(e,ψ)∂µΞρ,(16)whereΞµ=2i(¯ζ2γµζ1)−ξρ1ξσ2e aµ(∂[ρe aσ]).On˜λµ(e,ψ),the left-hand side of(11)becomes apparently rather complicated;δ˜λµ(e,ψ)=κδ(γaγρψ(x)∂[ρe aµ])=κγa[δNLγρψ(x)∂[ρe aµ]+γρδNLψ(x)∂[ρe aµ]+γρψ(x)∂[ρδNL e aµ]].(17) However the commutator of the two LSUSY transformations induces the similar GL(4,R);[δζ1,δζ2]˜λµ(e,ψ)=Ξρ∂ρ˜λµ(e,ψ)+˜λρ(e,ψ)∂µΞρ.(18)These results indicate that it is necessary to generalize(10),(11)and(13)for ob-taining SUSY invariant relations and for the closure of the algebra.Furthermore dueto the complicated expression of LSUSY(17)which makes the physical and math-ematical structures are obscure,we can hardly guess a linearized invariant action which is equivalent to SGM.Now we generalize the linearization by considering the auxirialyfields such that LSUSY transformation on the linearizedfields induces SP transformation.By comparing(11)with(17)we understand that the local Lorentz transforma-tion plays a crucial role.As for the local Lorentz transformation on the linearized asymptoticfields corresponding to the observed particles(in the low energy),it is natural to take(irrespective of(6))the following formsiδL˜λµ(x)=−ing to ˜ωab µ(e,ψ),we may need a bigger supermultiplet e.g.16+4·16=80d.o.f.,to carry out the linearization,in which case a rank-3tensor φµνρand a rank-2tensor-spinor λµνmay be candidates for the auxiliary fields.Now we consider the simple modification of SUGRA transformations(algebra)by adjusting the (composite)structure of the (auxiliary)fields.We take,in stead of(10)and (11),δ˜e a µ(x )=iκ¯ζγa ˜λµ(x )+¯ζ˜Λa µ,(20)δ˜λµ(x )=2κ˜ωab µσab ζ+˜Φµζ,(21)where ˜Λa µand ˜Φµrepresent auxiliary fields which are functionals of e a µand ψ.We need ˜Λa µterm in (20)to alter (14),(16),(17)and (18)toward that of super-Poincar´e algebra of SUGRA.We attempt the restoration of the manifest local Lorentz invari-ance order by order by adjusting ˜Λa µand ˜Φµ.In fact,the Lorentz spin connection ωab µ(e )(i.e.the leading order terms of ˜ωab µ(e,ψ))of (21)is reproduced by taking the following one˜Λa µ=κ22iκ(iκ2γa γρψ(x )∂[ρe aµ]−γa ˜Λa µ)=−iκ2{δNL ωab µ(e )σab ψ+ωµab (e )σab δNL ψ}=−i 2{˜ǫab (e,ψ)σab ·ωcd µ(e )σcd ψ+···}.(24)Remarkably the local Lorentz transformations of ˜λµ(e,ψ)(,i.e.the second term)with the field dependent antisymmetric parameters ˜ǫab (e,ψ)is induced in addition to the intended ordinary global SUSY transformation.This shows that (23)is the SUSY invariant relations for ˜λµ(e,ψ),for the SUSY transformation of (23)gives the right hand side of (21)with the extra terms.Interestingly the commutator of the two LSUSY transformations on (23)induces GL(4R);[δζ1,δζ2]˜λµ(e,ψ)=Ξρ∂ρ˜λµ(e,ψ)+∂µΞρ˜λρ(e,ψ),(25)whereΞρis the samefield dependent parameter as given in(16).(16)and(25) show the closure of the algebra on SP algebra provided that the SUSY invari-ant relations(12)and(23)are adopted.These phenomena coincide with SGM scenario[1][5]from the algebraic point of view,i.e.they are the superon-graviton composite(eigenstates)corresponding to the linear representations of SP algebra. As for the redundant higher order terms in(24)we can adjust them by considering the modified spin connection˜ωabµ(e,ψ)particularly with the contorsion terms and by recasting them in terms of(the auxiliaryfield d.o.f.)˜Φµ(e,ψ).In fact,we found that the following supermultiplet containing160(=80bosonic+80fermionic)d.o.f. may be the supermultiplet of the SUGRA-like LSUSY theory which is equivalent to SGM;for80bosonic d.o.f.[˜e aµ(e,ψ),aµ(e,ψ),bµ(e,ψ),M(e,ψ),N(e,ψ),Aµ(e,ψ),Bµ(e,ψ),A aµ(e,ψ),B aµ(e,ψ),A[ab]µ(e,ψ)](26) and for80fermionic d.o.f.[˜λµα(e,ψ),˜Λaµα(e,ψ)],(27) whereα=1,2,3,4are indices for Majorana spinor.The gauge d.o.f.of the local GL(4R)and the local Lorentz of the vierbein are subtracted.Note that the second line of(26)is equivalent to an auxiliaryfield with spin3.The a priori gauge invariance for˜λµα(e,ψ)is not necessary for massive case[14] corresponding to the spontaneous SUSY breaking.For it is natural to suppose that the equivalent linear theory may be a coupled system of graviton and massive spin 3/2with the spontaneous global SUSY breaking,which may be an analogue ob-tained by the super-Higgs mechanism in the spontaneous local SUSY breaking of N=1SUGRA[15].By continuing the heuristic arguments order by order referring to the familiar SUGRA supermultiplet wefind the following SUSY invariant relations up to O(ψ2):˜e aµ(e,ψ)=e aµ,(28)˜λµ(e,ψ)=−iκ(σabψ)ωabµ,(29)˜Λaµ(e,ψ)=κ24[(¯ψγρ∂ρ˜λµ)−(¯ψγρ˜λa)∂µe aρ−(¯˜λργρ∂µψ)]+κ38(¯˜λµσabγρψ)ωabρ,(31)Bµ(e,ψ)=iκ24[(¯ψγ5σaργb∂ρψ)(ωµba+ωabµ)+(γ5σabγc∂µψ)ωcab]+κ24[(γργa∂ρ˜λµ)−(γργa˜λb)∂µ˜e bρ+(¯˜λργaγρ∂µψ)]+κ38(¯˜λµσbcγaγρψ)ωabρ,(33)B aµ(e,ψ)=iκ28[−(¯ψγ5σbργaγc∂ρψ)(ωµcb+ωbcµ)−(¯ψγ5σbcγaγd∂µψ)ωdbc]−κ22[(¯ψγρσab∂ρ˜λµ)−(¯ψγρσab˜λc)∂µ˜e cρ+(¯˜λρσabγρ∂µψ)]−κ34(¯˜λµσcdσabγρψ)ωabρ.(35)In fact we can show that the following LSUSY transformations on(26)and(27) inuced by NLSUSY(3)close among them(80+80linearized multiplet).We showthe explicit expressions of some of the LSUSY transformations up to O(ψ).δ˜e aµ=iκ¯ζγa˜λµ−ǫa b˜e bµ+¯ζ˜Λaµ,(36)δ˜λµ=−i2ǫab(σab˜λµ)+Aµζ+Bµ(γ5ζ)+A aµ(γaζ)+B aµ(γ5γaζ)+A abµ(σabζ),(37)δ˜Λaµ=18i(¯ζγρDρ˜λa)˜e aµ+3i(¯ζγa Dµ˜λa)+2(¯ζσνργµDν˜λρ)−1164i(¯ζγρ˜λa)ωaρµ+4(¯ζσbcγa˜λa)ωbcµ−4(¯ζσaργb˜λ[ρ)ω|ab|µ]+4(¯ζσabγc˜λa)ωµcb−3(¯ζσργbc˜λ[ρ)ω|bc|µ]+2i(¯ζσabγµσcd˜λa)ωcdb −18−4i(¯ζDµ˜λa)+i(¯ζγaγρD[µ˜λρ])+2(¯ζσνργaγµDν˜λρ)+116−4i(¯ζγργa˜λb)ωbρµ−2(¯ζγργaσbc˜λ[ρ)ω|bc|µ]+2(¯ζγaσcdγb˜λb)ωcdµ+2(¯ζσcdγaγb˜λb)ωcdµ+4(¯ζσbργaγc˜λ[ρ)ω|bc|µ]−4(¯ζσbcγaγd˜λb)ωµdc −(¯ζγaγρσcd˜λ[ρ)ω|cd|µ]−2(¯ζσbcγaγµσde˜λb)ωdec+12(¯ζDµΛ′a)−κ4−2i(¯ζγρσab Dρ˜λc)˜e cµ+i(¯ζσabγρDρ˜λc)˜e cµ+i(¯ζσabγc Dµ˜λc)−2(¯ζσνρσabγµDν˜λρ) +184i(¯ζγρσab˜λc)ωcρµ+4(¯ζσcρσabγd˜λ[ρ)ω|cd|µ]−4(¯ζσcdσabγe˜λc)ωµed−(¯ζσabγρσde˜λ[ρ)ω|de|µ]−2i(¯ζσcdσabγµσef˜λc)ωefd−4i(¯ζσcdσabσefγc˜λd)ωefµ+2(¯ζσefσabγd˜λd)ωefµ+1terminates withψ4.It may be favorable that10bosonic auxiliaryfields,for example aµ(e,ψ),bµ(e,ψ),M(e,ψ),N(e,ψ)are arbitrary up now and available for the closure of the off-shell SP algebra in higher order terms.Finally we mention the systematic linearization by using the superfield formalism applied to study the coupled system of V-A action with SUGRA[16].We can define on such a coupled system a local spinor gauge symmetry which induces a super-Higgs mechanism[15]converting V-Afield to the longitudinal component of massive spin 3/2field.The consequent Lagrangian may be an analogue that we have anticipated in the composite picture but with the elementary spin3/2field.Developing the superfield formalism[17]on SGM spacetime may be crucial for carrying out the linearization along the SGM composite scenario,especially for N>1.The linearization of SGM action(1)with the extra dimensions,which gives another unification framework describing the observed particles as elementaryfields,is open. And the linearization of SGM action for spin3/2N-G fermionfield[18](with extra dimensions)may be in the same scope.Now we summarize the results as follows:(i)Referring to SUGRA transforma-tions we have obtained explicitly the SUSY invariant relations up to O(ψ)2and the corresponding new LSUSY transformations among80+80off-shell supermultiplet of LSUSY.(ii)The new LSUSY transformations on80+80linearized supermultiplet are different apparently from SUGRA transformations but close on super-Poincar´e. (iii)It is interesting that the simple relationλµ=e aµγaψ+···,which is sugested by theflat spacetime linearization,seems disfavour with the SGM linearization in our present method,so far.From the physical viewpoint what LSUSY SP may be to SGM in quantumfield theory,what O(4)symmetry is to the relativistic hydrogen model in quantum mechanics.The complete linearization to all orders up to O(ψ)4, which can be anticipated by the systematics emerging in the present study,needs specifications of the auxiliaryfields and remains to be studied.The details will appear separately[19].The authors would like to thank U.Lindstr¨o m for the interest in our works and for bringing the reference to our attentionss.The work of M.Sawaguchi is supported in part by the research project of High-Tech Research Center of Saitama Institute of Technology.References[1]K.Shima,Phys.Lett.B501,237(2001).[2]D.V.Volkov and V.P.Akulov,Phys.Lett.B46,109(1973).[3]K.Shima,M.Tsuda and M.Sawaguchi,hep-th/0211187(2002).[4]J.Wess and B.Zumino,Phys.Lett.B49,52(1974).Y.A.Golfand and E.S.Likhtman,JET.Lett.13,323(1971).[5]K.Shima,Z.Phys.C18,25(1983);K.Shima,European.Phys.J.C7,341(1999).[6]K.Shima and M.Tsuda,Class.and Quantum Grav.19,1(2002).[7]K.Shima and M.Tsuda,Phys.Lett.B507,260(2001).[8]E.A.Ivanov and A.A.Kapustnikov,J.Phys.A11,2375(1978);M.Roˇc ek,Phys.Rev.Lett.41,451(1978).T.Uematsu and C.K.Zachos,Nucl.Phys.B201,250(1982).[9]K.Shima,Y.Tanii and M.Tsuda,Phys.Lett.B525,183(2002),[10]K.Shima,Y.Tanii and M.Tsuda,Phys.Lett.B546,162(2002).[11]D.Z.Freedman,P.van Nieuwenhuisen and S.Ferrara,Phys.Rev.D13,3214(1976).S.Deser and B.Zumino,Phys.Lett.B62,335(1976).[12]K.Shima,M.Tsuda and M.Sawaguchi,Czech.J.Phys.38,21(2002).Suppl.A.Proceeding of Advanced Study Institute2002,Praha,Czech Republic(2002),ed.by M.Finger,et.al.hep-th/0209165.[13]K.Stelle and P.West,Phys.Lett.74,330(1978).S.Ferrara and P.van Nieuwenhuisen,Phys.Lett.74,333(1978).[14]C.Fronsdal,Phys.Rev.D18,3624(1978).[15]S.Deser and B.Zumino,Phys.Rev.Lett.38,1433(1977).[16]U.Lindstr¨o m and M.Roˇc ek,Phys.Rev.D19,2300(1979).[17]J.Wess and J.Bagger,Supersymmetry and Supergravity,second edittion,Princeton University Press(1992).[18]K.Shima and M.Tsuda,Phys.Lett.B521,67(2001).[19]K.Shima,M.Tsuda and M.Sawaguchi,in preparation.。