Ethercat通讯设计
基于智能嵌入式模块的EtherCAT通讯平台的设计

E e d d Mo u e E h r a s r s v h o n fc mmu iai n e ta d d s n a P ・ a e e l mb d e d l t e c tma t / l e t e p i to o e a n c t s ts n e i C - s d r a・ o g b ・
t I du til he e Et e c t i me n sra Et m t h r a man t i n n ARM— a e iqur mo u e h i h x el n i sat a d o b sd n i y d l S ek e c le t c mmu i ain fo t e sa o ltom n lsso h se /sa e t e sa in d t h r ce si sa d o n c t rm tt n p a r a ay i fte ma t r lv h tto a c a a t r tc n o h i f a i d t x ha g to sa d r a —i . aa e c n e meh d n e ltme
( 媒体访 问层 ) 加 了一个确 定 性调 度 的软件 层 , 增 该
主/ k A 站数据特 点 ,数 据 交换 方法及其 实时性 。
关键词:Ehr t t c ;实时工业以太网;A M;嵌入式模块 ea R
De i n o h h r a o m u ia i n p a f r a e n sg f t e Et e c tc m n c t l to m b s d o o
化技 术 ) 以其速 度 更快 、 线 更 灵 活 、 态更 简 单 、 接 组
输到 下一个 EhrA te T从 站 。当该 数 据 帧经 过所 有 C
基于EtherCAT总线的六轴工业机器人控制系统研究与开发

基于EtherCAT总线的六轴工业机器人控制系统研究与开发一、本文概述随着工业自动化技术的快速发展,工业机器人在生产线上的应用日益广泛。
作为工业机器人的核心组成部分,控制系统的性能直接决定了机器人的运动精度、稳定性和工作效率。
EtherCAT总线作为一种高性能的以太网现场总线技术,以其低延迟、高带宽和易扩展等特点,在工业控制领域得到了广泛应用。
本文旨在研究并开发一种基于EtherCAT总线的六轴工业机器人控制系统,以提高工业机器人的运动性能和控制精度,满足日益增长的自动化生产需求。
本文将首先介绍EtherCAT总线技术的基本原理和特点,分析其在工业机器人控制系统中的应用优势。
接着,将详细阐述六轴工业机器人的运动学模型和动力学特性,为控制系统的设计提供理论基础。
在此基础上,本文将重点研究控制系统的硬件架构和软件设计,包括EtherCAT主从站的选择与配置、运动控制算法的实现以及实时通信协议的优化等。
还将探讨控制系统的稳定性、可靠性和实时性等问题,以确保系统在实际应用中的稳定运行。
本文将通过实验验证所设计的控制系统的性能,并与传统控制系统进行对比分析。
实验结果将展示基于EtherCAT总线的六轴工业机器人控制系统在运动精度、响应速度和负载能力等方面的优势,为工业自动化领域的技术进步做出贡献。
二、EtherCAT总线技术EtherCAT(Ethernet for Control Automation Technology)是一种专为工业自动化领域设计的实时以太网通信协议。
它基于标准以太网技术,通过优化数据传输和同步机制,实现了高性能、低延迟的通信,特别适用于对实时性要求极高的工业控制系统中。
高速数据传输:EtherCAT协议支持高达100Mbps的数据传输速率,确保控制系统能够实时处理大量数据。
确定性延迟:通过优化网络结构和数据传输方式,EtherCAT实现了微秒级的确定性延迟,这对于精确控制工业机器人等应用至关重要。
EtherCAT - 以太网现场总线

EtherCAT - 以太网现场总线本文深入阐述了基于以太网现场总线系统的EtherCAT (Ethernet for Control Automation Technology)技术。
EtherCA T为现场总线技术领域树立了新的性能标准,具备灵活的网络拓扑结构,系统配置简单,和现场总线系统一样操作直观简便。
另外,由于EtherCA T实施的成本低廉,因此使系统得以在过去无法应用现场总线网络的场合中选用该现场总线。
1. 引言1.1 以太网和实时能力2. EtherCAT 运行原理3. EtherCAT 技术特征3.1 协议3.2 拓扑3.3 分布时钟3.4 性能3.5 诊断3.6 高可靠性3.7 安全性3.8 EtherCAT 取代PCI3.9 设备行规3.9.1 EtherCAT实现CAN总线应用层协议(CoE)3.9.2 EtherCAT实现伺服驱动设备行规IEC61491 (SoE)3.10 EtherCAT实现以太网(EoE)3.11 EtherCAT实现文件读取(FoE)4. 基础设施成本5. EtherCAT 实施5.1 主站5.1.1 主站实施服务5.1.2 主站样本代码5.2 从站5.2.1 EtherCAT Slave Controller5.2.2 从站评估工具包6. 小结7. 参考文献1. 引言现场总线已成为自动化技术的集成组件,通过大量的实践试验和测试,如今已获得广泛应用。
正是由于现场总线技术的普及,才使基于PC的控制系统得以广泛应用。
然而,虽然控制器CPU的性能(尤其是IPC的性能)发展迅猛,但传统的现场总线系统正日趋成为控制系统性能发展的“瓶颈”。
急需技术革新的另一个因素则是由于传统的解决方案并不十分理想。
传统的方案是,按层划分的控制体系通常都由几个辅助系统所组成(周期系统):即实际控制任务、现场总线系统、I/O系统中的本地扩展总线或外围设备的简单本地固件周期。
正常情况下,系统响应时间是控制器周期时间的3-5倍。
欧诺克 EtherCAT 使用说明书

EtherCAT使用说明书EtherCAT Use's manua l深圳市欧诺克科技有限公司第一章、 网络连接1.通讯网络接口定义CANOpen 网口定义:本产品网口使用的是市场上常见的标准的 RJ45 接口 8 针网口,定义如图 1-1 及表 1-1所示:管脚定义1CAN_H 2CAN_L 3VDD-GND 4空5空6空7空8空图 1-1,CANOpen 接线端口定义VDD_GND CAN_L CAN_HVDD_GND CAN_L CAN_H 表 1-1EtherCAT 网口定义:EtherCAT 采用的是标准的RJ45 接口的 8 针网口,定义如图 1-2 及表 1-2 所示:管脚定义1TX+2TX-3RX+4空5空6RX-7空8空表 1-2图 1-212345678123456782. 多台伺服并联组网CANOpen 伺服驱动器:多台 CANOpen 伺服驱动器并网组成网络时,不同的控制器要求可能有区别,正常情况下是第一台伺服和控制器 canH 和 canL 之间并联 120Ω 电阻,最后一台伺服驱动器也要加 120 欧姆终端电阻(注意:多台 CANOpen 伺服驱动器联网时候不必要严格按照上进下出的网口顺序插好网线)。
EtherCAT 伺服驱动器:多台 EtherCAT 伺服驱动器组网时,要严格按照IN和OUT的网口顺序插好网线(注意不能加终端电阻)。
注意:1. 多台CANOpen 伺服驱动器联网时候不必要严格按照IN和OUT的网口顺序插好网线;2. 总线伺服驱动器网线电柜走线时应该跟其它电缆线分开,特别是强电线路,尽量远离干扰源(如变压器、变频器、机柜风扇等),尽可能的减少干扰;3. 总线伺服驱动器网线尽量采用双绞网络线,提高高频磁场噪声干扰的抵抗能力,也能减小线缆对外的辐射;4. 总线伺服驱动器的接地尽量与其它接地分开,单独接地处理;5. CANOpen、EtherCAT 所使用通讯网线必须要求在 5 类线或者以上等级。
ethercat通讯协议传输距离
ethercat通讯协议传输距离全文共四篇示例,供您参考第一篇示例:EtherCAT(Ethernet for Control Automation Technology)是一种高性能实时以太网通信协议,广泛应用于工业自动化领域。
它具有高速、低成本、可扩展性等优点,使得其在现代工业控制系统中得到了广泛的应用。
在实际应用中,关于EtherCAT通信协议的传输距离一直是一个备受关注的话题。
本文将就EtherCAT通信协议传输距离进行深入探讨。
EtherCAT通信协议的传输距离受到什么因素的影响呢?传输距离主要受到信号衰减、噪声干扰、网络拓扑结构、线缆质量等多方面因素的影响。
在实际应用中,正确的理解和应对这些因素,对于保障通信质量和可靠性至关重要。
传输距离的限制主要受到信号衰减的影响。
信号衰减是指信号在传输过程中逐渐减弱,到达远端时可能无法被正确解析。
对于EtherCAT通信协议来说,信号衰减的主要原因是线缆本身的损耗和传输介质的性能限制。
一般来说,传输距离越长,信号衰减越严重,因此需要选择合适的线缆和传输介质来保证通信质量。
噪声干扰也是影响传输距离的重要因素。
工业现场环境通常存在各种电磁干扰源,这些干扰源会对EtherCAT通信产生影响,导致通信质量下降甚至通信中断。
在设计EtherCAT通信系统时,需要考虑抑制和消除噪声干扰的措施,以提高通信的可靠性和稳定性。
网络拓扑结构也会对传输距离产生影响。
EtherCAT支持星型、环形、总线型等多种网络拓扑结构,在不同的拓扑结构下,传输距离的限制也会有所不同。
一般来说,采用星型结构的EtherCAT网络能够实现较长的传输距禿而采用总线型结构的网络传输距离相对较短。
线缆质量也是影响EtherCAT通信传输距禿的重要因素。
良好的线缆质量能够有效减小信号衰减和噪声干扰,提高通信的稳定性。
在实际应用中,选择符合要求的高质量线缆也是确保通信质量的一大关键。
那么,针对这些影响因素,我们应该如何来规划和优化EtherCAT 通信的传输距离呢?需要根据实际应用需求和现场环境条件来选择合适的通信介质和线缆。
ethercat通讯原理

ethercat通讯原理EtherCAT是一种为实时工业自动化系统设计的高性能工业以太网技术。
它是一种开放的通信协议,可以将多个设备连接到一个通信网络中,并以极低的延迟进行通信。
EtherCAT采用了一种特殊的通信架构,该架构允许数据在网络上以流的形式传输,从而实现了高实时性。
EtherCAT的通信原理可以分为以下几个主要步骤:1. 主节点发送数据帧:EtherCAT网络中的一个设备被指定为主节点,负责控制整个网络的通信。
主节点将数据以数据帧的形式发送到网络上,这个数据帧被称为EtherCAT Telegram。
2.数据帧传输:数据帧通过物理层以太网传输到网络中的设备。
每个设备都有一个物理层的接口,用于接收和发送数据帧。
3.通过数据帧的芯片级处理:当数据帧被接收到设备的物理层接口时,数据帧被解析成多个指令和数据。
设备的芯片级处理器对这些指令和数据进行处理,并执行相应的操作。
4.数据帧处理:设备将接收到的数据帧传递给下一个设备。
数据帧的处理速度非常快,因此在数据帧传递的过程中,网络上的各个设备可以同时处理数据帧。
5.数据更新:数据帧在网络上的传递形成一个环路,当数据帧回到主节点时,主节点通过输入和输出数据的比较来检测数据是否有变化。
如果有变化,主节点将更新数据并再次发送到网络上。
通过上述步骤,EtherCAT实现了高实时性的通信。
1. 一次传输多个数据:在EtherCAT网络上,可以通过一个数据帧传输多个数据。
这意味着多个数据可以同时传输,从而减少了通信的延迟时间。
2. 高速数据传输:由于EtherCAT采用了流式传输的方式,数据可以非常快速地在网络上传输。
在EtherCAT网络上,数据的传输速度可以达到每个数据帧几十微秒的处理时间,这使得实时性非常高。
3.数据更新及时:当数据帧回到主节点时,数据可以及时更新。
这意味着设备可以及时获得最新的数据,从而实现更高的控制精度。
总而言之,EtherCAT通信的原理主要是通过主节点将数据以数据帧的形式发送到网络中,然后数据帧在网络上传递并被各个设备处理,最后数据帧回到主节点进行数据更新。
ethercat 通讯结构

ethercat 通讯结构
EtherCAT(Ethernet for Control Automation Technology)是一种实时以太网通信技术。
EtherCAT通讯结构是面向实时数据传输的控制系统通讯解决方案。
基于EtherCAT的通讯结构可以有效提高工业自动化控制系统的响应速度和实时性能,取代了传统的工业总线通讯方案,在众多行业领域得到广泛应用。
EtherCAT通讯结构采用一种特殊的实时通信机制——分布式时钟同步技术。
通过在通信帧中加入时间戳,所有连接在同一个EtherCAT网络上的设备都能够在同一时刻接收到数据,并在同一时刻将处理后的数据返回控制器,实现了高效的实时数据通讯。
具体来说,EtherCAT通讯结构由一个主站和多个从站组成。
主站负责管理整个系统,发送控制命令和接收从站返回的数据。
从站负责采集传感器数据、执行控制命令等任务,并将处理后的数据返回给主站。
主站和从站之间的通信和数据传输都是通过以太网物理层协议来进行的。
在EtherCAT通讯结构中,数据包从主站发送到第一个从站,然后沿着EtherCAT网络一路转发,直到所有从站都接收到数据包并完成响应。
这种分布式的通信方式,使得EtherCAT通讯结构在大规模多终
端的工业控制系统中,具备了高效快速传输的能力。
总之,EtherCAT通讯结构通过采用先进的分布式时钟同步技术,实现了高效可靠的实时数据通讯。
由于其高速传输、开放标准、强大的网络管理和配置能力,被广泛应用于机器人控制、智能制造、智能建筑等众多领域,成为工业自动化控制系统中的重要技术。
ethercat通讯原理
ethercat通讯原理EtherCAT(以太CAT)是一种高性能、实时性和开放性的实时以太网通信技术。
它基于标准的以太网硬件和IEEE 802.3以太网协议进行通信。
EtherCAT的通信原理是通过在以太网数据帧中进行快速和实时的数据通信,以达到高效的通信和控制。
下面将详细介绍EtherCAT通信的原理。
EtherCAT通信的核心原理是主站和从站之间的数据传递。
在EtherCAT网络中,主站是负责控制和监视从站的设备,而从站是执行主站指令的设备。
主站通过以太网发送数据帧,从站在接收到数据帧后,按照EtherCAT协议进行数据处理,并将数据返回给主站。
EtherCAT网络将数据帧分为多个数据段(Data Segment),每个数据段有一个从站的网络地址和数据大小。
主站发送数据帧时,数据段经过整个从站链路,每个从站在接收到数据段后,处理其中的数据并将数据通过链路传递给下一个从站。
EtherCAT通信的特点之一是采用了分布式时钟同步技术。
在整个EtherCAT网络中,有一个主站担任时钟主节点的角色,负责向所有从站发送同步数据。
从站接收到同步数据后,利用硬件实现时钟同步,保证所有从站的时钟保持同步。
EtherCAT通信还采用了逐次处理的方式,即从站接收到数据后立即处理数据,并将处理结果发送给下一个从站。
这样可以大大减小主站与从站之间的通信延迟,并且降低了通信周期。
EtherCAT通信的速度非常快,达到每个数据帧可达到1000多个从站的传输速率,同时EtherCAT通信还可以与标准以太网连接,实现与其他以太网设备的数据交换,提高了系统的灵活性和可扩展性。
总结起来,EtherCAT通信的原理是通过将数据分成多个数据段,逐个传递给从站,在从站之间进行快速数据处理和传递。
采用分布式时钟同步和逐次处理的技术,实现高效的通信和控制。
EtherCAT通信的优势是实时性强、速度快,同时与标准以太网兼容,具有较高的可扩展性和灵活性。
基于STM32_的EtherCAT_转UDP_通信转换系统设计与实现
10Internet Communication互联网+通信以太网控制自动化技术EtherCAT 在工业自动化领域应用广泛。
在工业以太网总线技术EtherCAT 中,从站之间的通信采用分布式时钟同步机制,保证了通信的高速、低延迟、同步和确定性。
然而,EtherCAT 与工控机端的通信网络一般采用TCP/IP 协议,由于其需要建立连接和确认数据的传输,无法与EtherCAT 直接进行数据交互,导致了通信的非实时性,因此,需借用硬件介质进行通信协议转换。
伺服电机、步进电机和输入/输出口的控制过程非常复杂,任何一个控制环节出错都会造成控制系统运行不稳。
在实际产品开发中,考虑成本因素无法直接在控制系统中运行实时分析软件,而是要将相应数据实时地传输到PC 机上,通过PC 机上的数据采集、分析软件中查找、定位问题根源。
为了实现EtherCAT 与工控机端的TCP/IP 协议的互通,本文提出了一种基于UDP 协议的通信转换方案,利用UDP 协议的无连接和高带宽特点,提高通信的效率和速度,同时利用FPGA 开发的高性能TCP/IP 通信模块,保证通信的实时性和可靠性。
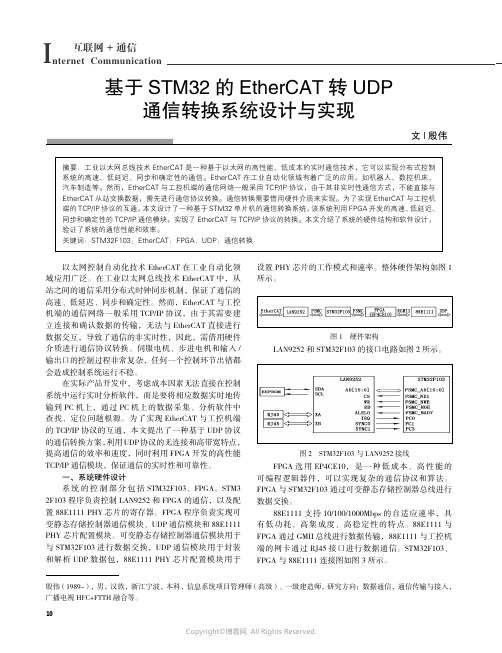
一、系统硬件设计系统的控制部分包括STM32F103、FPGA。
STM32F103程序负责控制LAN9252和FPGA 的通信,以及配置88E1111 PHY 芯片的寄存器。
FPGA 程序负责实现可变静态存储控制器通信模块、UDP 通信模块和88E1111 PHY 芯片配置模块。
可变静态存储控制器通信模块用于与STM32F103进行数据交换,UDP 通信模块用于封装和解析UDP 数据包,88E1111 PHY 芯片配置模块用于基于STM32的EtherCAT 转UDP通信转换系统设计与实现设置PHY 芯片的工作模式和速率。
整体硬件架构如图1所示。
图1 硬件架构LAN9252和STM32F103的接口电路如图2所示。
图2 STM32F103与LAN9252接线FPGA 选用EP4CE10,是一种低成本、高性能的可编程逻辑器件,可以实现复杂的通信协议和算法。
锐特 RS EtherCAT 系列伺服设计维护手册说明书

使用手册前言首先感谢您购买RS系列V3.0伺服驱动器!RS系列V3.0伺服驱动器是锐特技术有限公司自主研制第三代通用型交流伺服驱动器。
该系列产品功率范围为0.05~3KW,支持基于RS485的MODBUS通讯协议,可组网运行。
驱动器也包含内部PLC模式,方便客户的定制化功能。
RS系列伺服系统标准配置17~23位单圈/多圈绝对值编码器的电机,其中80以下机座采用全系列超短款高密度伺服电机。
能够做到超小安装尺寸和高速精准定位。
RS系列伺服系统具有定位快,适配性能好的特点。
驱动器具有三种基本控制模式(位置控制、速度控制、转矩控制),此外,利用驱动器“内部PLC编程”或者“485通讯“可以实现更灵活的应用功能。
本手册为RS系列V3.0伺服驱动器的综合用户手册,在正式通电连接前,请仔细阅读本手册,以确认相关信息。
若对产品功能及性能方面有所疑惑,请咨询我公司的技术支持。
由于致力于伺服驱动器的不断改善,因此本公司提供的资料如有变更,恕不另行通知。
手册版本变更记录目录前言 (I)手册版本变更记录 (II)目录 (III)第1章安全提醒 (1)1.1安全注意事项 (1)1.2确认产品到货时的注意事项 (1)1.3包装清单 (2)第2章产品信息及安装 (3)2.1驱动器介绍 (3)铭牌与型号说明 (3)伺服驱动器规格 (3)伺服驱动器的安装 (4)2.2伺服电机型号说明 (5)2.2.1 电机命名 (6)2.2.2 电机规格 (6)2.2.3 编码器类型 (7)2.3电机的安装 (7)2.3.1 伺服电机的使用环境 (7)2.3.2 伺服电机的尺寸 (7)2.3.3 电机安装注意事项 (10)2.4伺服系统配置一览表 (11)2.5配套线缆规格 (12)2.5.1 电机和编码器配线 (12)2.5.2 Mini-USB调试配线 (13)2.5.3 EtherCAT通讯配线 (13)2.5.4 制动电阻使用说明 (14)2.6多圈绝对值编码器的配件说明 (14)2.7制动电阻的使用说明 (15)2.8多圈绝对值编码器的配件说明 (15)第3章伺服驱动及电机配线 (16)3.1伺服驱动器的接口分布 (16)3.2伺服驱动器主电路连接 (16)3.3伺服驱动器编码器信号端子CN2的连接 (17)3.4伺服驱动器控制信号端子CN1的连接 (18)CN1引脚定义 (18)3.4.2 通用输入接口 (19)3.4.3 通用输出接口 (21)3.5驱动器调试通讯端子CN3的连接 (22)3.6驱动器E THER CAT通讯端子CN4、CN5的连接 (22)3.7抱闸控制连接示例 (23)3.8电气接线的抗干扰对策 (23)第4章面板显示与操作 (25)4.1面板显示概述 (25)4.1.1 面板组成介绍 (25)4.1.2 面板显示内容 (25)4.1.3 面板显示操作方法 (26)4.1.4 数据显示 (26)4.1.5 故障显示 (27)4.1.6 监控显示 (28)4.2参数设定 (29)4.3辅助功能 (29)4.3.1 参数管理 (30)4.3.2 故障复位 (30)4.3.3 绝对值操作 (30)4.3.4 点动试机 (31)4.3.5 开环测试 (31)4.3.6 编码器校准 (31)4.3.7 点动运行 (32)4.3.8 定长/连续运行 (32)第5章通信网络配置 (33)5.1E THER CAT协议概述 (33)5.2系统参数设置 (33)5.3E THER CAT通信基础 (33)5.3.1 EtherCAT通信规范 (34)5.3.2 通信结构 (34)5.3.3 状态机 (35)5.3.4 过程数据PDO (36)5.3.5 邮箱数据SDO (37)5.3.6 分布时钟 (38)5.3.7 状态指示 (38)第6章控制模式 (44)6.1基本设定 (44)6.1.1 转换因子设置 (44)6.2伺服状态设置 (45)6.2.1 控制字6040h (46)6.2.2 状态字6041h (47)6.3伺服模式设置 (48)6.3.1 伺服模式介绍 (48)6.3.2 模式切换 (49)6.4周期同步位置模式(CSP) (49)6.4.1 相关对象 (49)6.4.2 相关功能设置 (50)6.4.3 建议配置 (50)6.5周期同步速度模式(CSV) (52)6.5.1 相关对象 (52)6.5.2 相关功能设置 (53)6.5.3 建议配置 (53)6.6周期同步转矩模式(CST) (53)6.6.1 相关对象 (53)6.6.2 相关功能设置 (54)6.6.3 建议配置 (54)6.7轮廓位置模式(PP) (55)6.7.1 相关对象 (55)6.7.2 相关功能设置 (56)6.7.3 位置曲线发生器 (57)6.7.4 建议配置 (58)6.8轮廓速度模式(PV) (58)6.8.1 相关对象 (58)6.8.2 相关功能设置 (59)6.8.3 建议配置 (59)6.9轮廓转矩模式(PT) (60)6.9.1 相关对象 (60)6.9.2 相关功能设置 (61)6.9.3 建议配置 (61)6.10原点回归模式(HM) (61)6.10.1 相关对象 (61)6.11辅助功能介绍 (70)6.11.1 探针功能 (70)第7章对象字典详细说明 (73)7.1对象字典分类说明 (73)7.2通信参数详细说明(1000H组) (75)7.3制造商定义参数详细说明(2000H组) (80)7.3.1 伺服电机参数 (80)7.3.2 驱动器参数 (81)7.3.3 编码器参数 (82)7.3.4 基本控制参数 (83)7.3.5 输入端子参数 (84)7.3.6 输出端子参数 (85)7.3.7 位置控制参数 (86)7.3.8 速度控制参数 (87)7.3.9 力矩控制参数 (87)7.3.10 增益参数 (88)7.3.11 自整定参数 (90)7.3.12 故障参数 (91)7.4子协议定义参数详细说明(6000H组) (92)第8章应用案例 (101)8.1配合欧姆龙控制器操作案例 (101)8.1.1 添加设备描述文件 (101)8.1.2 新建工程 (102)8.1.3 添加驱动器 (103)8.1.4 添加运动控制轴 (104)8.1.5 映射轴与驱动器 (105)8.1.6 编写测试代码 (105)8.1.7 连接驱动器 (107)8.1.8 分配驱动器地址 (108)8.1.9 程序下载 (109)8.1.10 运动测试 (109)8.2配合倍福控制器操作案例 (110)8.2.1 添加设备描述文件 (110)8.2.2 新建项目 (110)8.2.3 添加主站网卡 (111)8.2.6 设置电子齿轮比 (114)8.2.7 编码器设置 (114)8.2.8 设置运动参数 (114)8.2.9 激活 (115)8.2.10 使能电机 (115)8.2.11 运动测试 (116)第9章故障处理 (117)9.1故障代码 (117)第10章附录 (120)附录A驱动器LED显示参数与对象字典关系一览表 (120)P00组: (120)P01组: (121)P02组: (122)P03组: (123)P04组: (124)P05组: (125)P06组: (126)P08组: (127)P12组: (127)P13组: (128)第1章安全提醒1.1安全注意事项◆在切断供电电源5分钟以上,再进行驱动器的拆装。
合信 ethercat设定方法

合信ethercat设定方法合信是一款以太坊上的去中心化应用(DApp),为用户提供了一个安全、不可变的信任框架。
本文档将详细介绍如何设置合信的方法,帮助用户轻松开始使用和体验合信的功能。
1. 了解合信2. 下载并安装合信应用程序3. 创建合信账户4. 导入/导出合信账户5. 设置合约管理6. 添加信任人1. 了解合信:合信是基于以太坊区块链技术的去中心化应用程序,通过智能合约实现信任的建立和管理。
合信的核心功能包括创建和分享信任合约,验证和记录信任的行为,以及提供信任评估和奖励机制。
2. 下载并安装合信应用程序:在手机应用商店搜索“合信”并下载安装应用程序。
也可以在合信官方网站上找到相应的下载链接并进行安装。
3. 创建合信账户:打开合信应用程序,并点击“创建账户”。
根据提示,输入个人信息并设置密码来创建一个新的合信账户。
确保密码强度足够高,以确保账户的安全性。
4. 导入/导出合信账户:如果您已经在其他设备上创建了合信账户,可以通过“导入账户”选项将其导入到当前设备。
在合信应用程序中选择相应选项,并按照提示执行相应步骤。
另外,如果您希望在不同设备之间迁移合信账户,可以选择“导出账户”选项,生成一个安全的备份文件。
将备份文件保存在安全的地方,并在另一设备上选择“导入账户”,并使用备份文件进行恢复。
5. 设置合约管理:在合信应用程序中,点击“合约管理”选项,并进入合约管理页面。
在此页面,可以查看已创建的合约,添加新的合约,以及设置合约的属性和权限。
5.1 查看已创建的合约:在合约管理页面,可以查看已创建的合约并了解其基本信息。
可以查看合约的名称、地址、创建者、创建时间等重要信息。
5.2 添加新的合约:点击“添加合约”按钮,根据提示填写合约的相关信息。
包括合约名称、参与方信息、合同条款等。
在合约创建成功后,将在合约管理页面看到新添加的合约。
5.3 设置合约属性和权限:在合约管理页面,可以编辑已创建的合约的属性和权限。
ethercat 通讯结构
Ethercat 通讯结构介绍Ethercat(以太网计算机自动控制技术)是一种高性能、实时以太网通信协议,适用于工业自动化领域。
本文将全面探讨Ethercat通讯结构,包括其基本原理、通讯模型以及应用实例。
Ethercat 通讯基本原理Ethercat 通讯基于以太网协议,但它采用了一种分布式时钟同步和全局共享通道的方式,使得各个从设备之间的通讯变得十分高效和实时。
Ethercat 的基本工作原理如下:1.Master-Slave 结构:Ethercat 网络由一个Master(主主机)和多个Slave(从设备)组成。
Master负责控制通讯的调度和同步,而Slave则负责执行具体的任务。
2.工作周期:Ethercat 的通讯是按照固定的周期进行的,该周期被称为工作周期。
Master控制数据帧的发送和接收,并确保在每个工作周期内完成所有从设备的通讯。
3.分布式时钟同步:Ethercat 网络的一个重要特点是分布式时钟同步。
Master通过向每个Slave发送同步帧来同步所有从设备的时钟,使得整个网络保持高度同步。
4.数据传输:Ethercat 通过在一个以太网数据帧(Ethercat Frame)中封装从设备的数据,实现高效的数据传输。
每个数据帧中可以包含一个或多个从设备的数据信息。
Ethercat 通讯模型Ethercat 采用了Master-Slave结构的通讯模型,下面是Ethercat 通讯模型的详细流程:1.Master 发送同步帧:在每个工作周期的开始,Master向网络中的所有Slave发送同步帧,以实现时钟同步。
2.从设备响应:每个Slave接收到同步帧后,根据同步帧中的时间戳更新自身的时钟,并准备好接收数据。
3.数据传输:Master在同一个工作周期内依次发送数据帧给每个Slave,并接收从设备返回的数据。
4.数据处理:每个Slave接收到数据帧后,解析其中的数据,并根据Master的指示执行相应的任务。
ethercat通讯协议例程
ethercat通讯协议例程本例程介绍了如何在基础例程(SAMPLE_APPLICATION)的基础上添加新的过程数据。
默认的基础例程提供了一下的过程数据:32Bit的Input Counter(0x6000)32Bit的Output Counter(0x7010)当Output Counter为0时,Input Counter每个cycle自加1;否则Input Counter 等于Output Counter+1。
本例程中新增的过程数据:32Bit的Input Counter(0x6000)32Bit的Result(0x6010)Output Value(0x7010)----SI1:Value1(32Bit)----Sl2:Value2(32Bit)Result(0x6010)是Sl1(0x7010.1)和Sl2(0x7010.2)之和。
Input Counter(0x6000)每个cycle自加1。
1.创建基础例程这一节简单介绍一下如何在倍福EL9800评估板上创建基础例程。
当然,也可以在已有的其他类似的例程上进行新增过程数据的修改。
按照章节3.1 "SSC Tool”中的步骤1~7进行操作(这里的章节3.1是指《Application Note ET9300 SSC》的3.1)。
选择"EL9800 | 8Bit Digital I/O,16Bit Analog Input"的配置。
在"Application"组下将"EL9800APPLICATION"设置为0,将"SAMPLE_APPLICATION"设置为1。
保存工程并创建新的文件(Project->"Create new Slave Files")。
基于已创建的ESI文件,编辑从站EEPROM。
基于生成的源文件创建MPLAB工程。
信捷plc与编码器通过EtherCAT协议通讯
信捷plc与编码器通过EtherCAT协议通讯
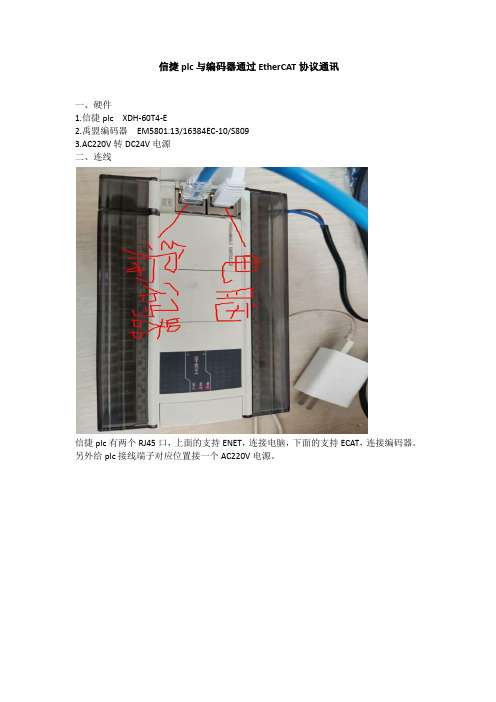
一、硬件
1.信捷plc XDH-60T4-E
2.禹盟编码器EM5801.13/16384EC-10/S809
3.AC220V转DC24V电源
二、连线
信捷plc有两个RJ45口,上面的支持ENET,连接电脑,下面的支持ECAT,连接编码器。
另外给plc接线端子对应位置接一个AC220V电源。
根据编码器的接线图连接好编码器,网线只用1236四芯。
将编码器的xml文件手动粘贴到指定的位置。
打开编程软件,点击通讯参数配置
新建一个驱动。
点击连接状态和使用状态,连接到plc
点击PLC配置中的EtherCAT
弹出的对话框中点击扫描,进入配置界面
功能模块选择IOmodule
IO映射中的HD10000就是编码器读上来的数值了
在自由监控状态下已经可以看到编码器的变化,根据需要可进行编程。
工业控制网络 第2版 第8章 EtherCAT

8.3 EtherCAT伺服驱动器控制协议
一、CoE(CANopen over EtherCAT) EtherCAT(CoE)网络参考模型由三部分组成:物 理层、数据链路层和应用层。
EtherCAT CoE参考模型
8.3 EtherCAT伺服驱动器控制协议
FMMU 现场总线存储映射管理单元,FMMU负责将 主站分配的地址和Slave本身的物理地址建立映射关系。 FMMU映射步骤:
8.2 EtherCAT协议模型
EtherCAT主站运行需具备以下几个基本功能: 4. 可进行非周期性数据通信,完成系统参数配置, 处理通讯过程中突发事件。 5. 实现周期性过程数据通信,实现数据实时交换, 实时监控从站状态,从站反馈 信号实时处理等功能。
8.2 EtherCAT协议模型
二、EtherCAT从站组成 从站一般是有3部分器件组成的:物理层器件、
8.2 EtherCAT协议模型
EtherCAT系统运行原理图
8.2 EtherCAT协议模型
一、EtherCAT主站组成 主站的实现可采用嵌入式和PC机两种方式,均
需 配 备 标 准 以 太 网 MAC 控 制 器 , 传 输 介 质 可 使 用 100BASE-TX 规 范 的 5 类 UTP ( Unshielded Twisted Pair,非屏蔽双绞线)线缆。
8.3 EtherCAT伺服驱动器控制协议
8.3 EtherCAT伺服驱动器控制协议
CoE 完 全 遵 从 CANopen 的 应 用 层 行 规 , CANopen 标准应用层行规主要有:
1、 CiA 401: I/O模块行规。 2、CiA 402:伺服和运动控制行规。 3、CiA 403: 人机接口行规。 4、CiA 404:测量设备和闭环控制行规。 5、CiA 406:编码器行规。 6、CiA 408:比例液压阀等。
伺服驱动器EtherCAT接口设计
伺服驱动器EtherCAT接口设计李文虎;李叶松;王江城【摘要】To apply the industrial ethernet technology in motion control filed, the EtherCAT protocol was generally introduced,mainly described the design procedures of realizing the EtherCAT communication interface on servo driver. It emphasized on the methods of combining the CANopen protocol with EtherCAT protocol and the design of application layer software of servo motion control, the basic frame,flow and points were given to build the software. Finally,practical operation results of this network-based servo drive system were given to verify the validity. The results show that EtherCAT can satisfy the strict requirements of motion control.%为将工业以太网技术应用于运动控制领域,简单介绍了EtherCAT协议,描述了实现伺服驱动器EtherCAT协议通讯接口的设计过程.重点分析了将CANopen相关行规映射到EtherCAT协议的基本方法和针对伺服运动控制的应用层软件设计,给出了软件实现的基本框架、流程和要点.最后给出了网络化伺服驱动系统的实际控制结果,运行结果表明EtherCAT能够很好地满足运动控制领域的高要求.【期刊名称】《电气传动》【年(卷),期】2011(041)007【总页数】5页(P51-55)【关键词】EtherCAT;伺服驱动器;软件设计【作者】李文虎;李叶松;王江城【作者单位】华中科技大学,控制科学与工程系,湖北,武汉,430074;华中科技大学,控制科学与工程系,湖北,武汉,430074;华中科技大学,控制科学与工程系,湖北,武汉,430074【正文语种】中文【中图分类】TP3931 引言随着伺服系统对动态响应和控制精度的要求不断提高,实际系统间传递信息的规模和复杂度也在不断增加,这给运动控制系统提出了更高的要求,将工业以太网技术运用于伺服驱动系统中,使系统实现高速度、高精度、同步协调控制成为可能。
ethercat 国际标准
ethercat 国际标准
EtherCAT是一种开放式、实时以太网通讯协议,由德国Beckhoff Automation GmbH & Co. KG公司开发。
它被设计用于工业自动化应用,具有高速、低延迟和高可靠性的特点。
EtherCAT通过以太网连接设备,实现实时数据传输和控制,适用于各种工业自动化系统。
EtherCAT国际标准是由国际电工委员会(IEC)制定的,旨在为工业自动化领域提供统一的通讯协议。
该标准规定了EtherCAT的物理层、数据链路层和应用层规范,以确保不同厂商生产的设备能够相互兼容和互操作。
在中国,EtherCAT也得到了广泛应用和推广。
中国政府将EtherCAT列为重点发展的工业自动化技术之一,推动其在国内工业自动化领域的应用和发展。
总之,EtherCAT作为一种开放式、实时以太网通讯协议,已经成为工业自动化领域的重要标准之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
针对于高性能伺服控制系统在控制现场需要多个伺服电机并联,组网困难,实时性要求高等
特点,引入实时以太网Ethercat技术。
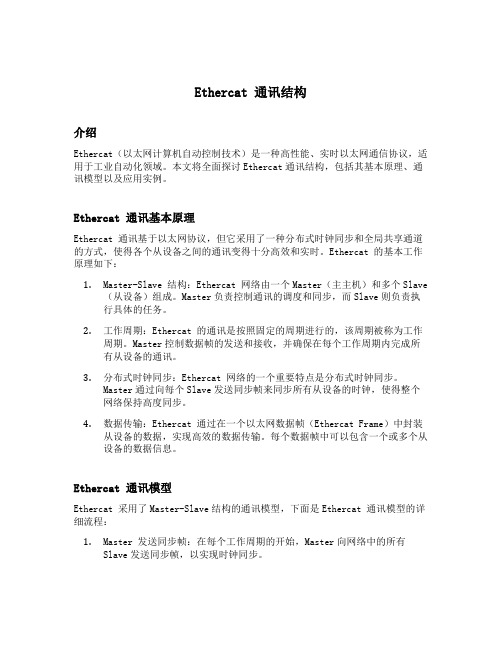
基于Ethercat的驱动器系统采用主从式结构,该系统
由一个Ethercat主站和若干个从站,主站和从站之间通过Ethercat进行连接通讯。
针对实际
需求,本系统采用ET1100芯片作为从站控制器,通过RJ45接口连接Ethercat网络,从站控
制器ET1100和DSP之间采用SPI通讯进行数据交互。
设计的从站Ethercat模块,接线简单,协议开发性好、I/O响应速度快,系统软硬件集成度高。
最后通过仿真和实验的验证,满足
系统要求。
Ethercat从站硬件结构图如所示,DSP和ET1100通过SPI交换数据,DSP向EEPROM写入配置数据,以太网接口1和2分别用于接收主站上行电报和发送下行电报。