Bounded-error interactive ray tracing
Native Instruments MASCHINE MK3 用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (25)1.1MASCHINE Documentation (26)1.2Document Conventions (27)1.3New Features in MASCHINE 2.8 (29)1.4New Features in MASCHINE 2.7.10 (31)1.5New Features in MASCHINE 2.7.8 (31)1.6New Features in MASCHINE 2.7.7 (32)1.7New Features in MASCHINE 2.7.4 (33)1.8New Features in MASCHINE 2.7.3 (36)2Quick Reference (38)2.1Using Your Controller (38)2.1.1Controller Modes and Mode Pinning (38)2.1.2Controlling the Software Views from Your Controller (40)2.2MASCHINE Project Overview (43)2.2.1Sound Content (44)2.2.2Arrangement (45)2.3MASCHINE Hardware Overview (48)2.3.1MASCHINE Hardware Overview (48)2.3.1.1Control Section (50)2.3.1.2Edit Section (53)2.3.1.3Performance Section (54)2.3.1.4Group Section (56)2.3.1.5Transport Section (56)2.3.1.6Pad Section (58)2.3.1.7Rear Panel (63)2.4MASCHINE Software Overview (65)2.4.1Header (66)2.4.2Browser (68)2.4.3Arranger (70)2.4.4Control Area (73)2.4.5Pattern Editor (74)3Basic Concepts (76)3.1Important Names and Concepts (76)3.2Adjusting the MASCHINE User Interface (79)3.2.1Adjusting the Size of the Interface (79)3.2.2Switching between Ideas View and Song View (80)3.2.3Showing/Hiding the Browser (81)3.2.4Showing/Hiding the Control Lane (81)3.3Common Operations (82)3.3.1Using the 4-Directional Push Encoder (82)3.3.2Pinning a Mode on the Controller (83)3.3.3Adjusting Volume, Swing, and Tempo (84)3.3.4Undo/Redo (87)3.3.5List Overlay for Selectors (89)3.3.6Zoom and Scroll Overlays (90)3.3.7Focusing on a Group or a Sound (91)3.3.8Switching Between the Master, Group, and Sound Level (96)3.3.9Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.973.3.9.1Extended Navigate Mode on Your Controller (102)3.3.10Navigating the Software Using the Controller (105)3.3.11Using Two or More Hardware Controllers (106)3.3.12Touch Auto-Write Option (108)3.4Native Kontrol Standard (110)3.5Stand-Alone and Plug-in Mode (111)3.5.1Differences between Stand-Alone and Plug-in Mode (112)3.5.2Switching Instances (113)3.5.3Controlling Various Instances with Different Controllers (114)3.6Host Integration (114)3.6.1Setting up Host Integration (115)3.6.1.1Setting up Ableton Live (macOS) (115)3.6.1.2Setting up Ableton Live (Windows) (116)3.6.1.3Setting up Apple Logic Pro X (116)3.6.2Integration with Ableton Live (117)3.6.3Integration with Apple Logic Pro X (119)3.7Preferences (120)3.7.1Preferences – General Page (121)3.7.2Preferences – Audio Page (126)3.7.3Preferences – MIDI Page (130)3.7.4Preferences – Default Page (133)3.7.5Preferences – Library Page (137)3.7.6Preferences – Plug-ins Page (145)3.7.7Preferences – Hardware Page (150)3.7.8Preferences – Colors Page (154)3.8Integrating MASCHINE into a MIDI Setup (156)3.8.1Connecting External MIDI Equipment (156)3.8.2Sync to External MIDI Clock (157)3.8.3Send MIDI Clock (158)3.9Syncing MASCHINE using Ableton Link (159)3.9.1Connecting to a Network (159)3.9.2Joining and Leaving a Link Session (159)3.10Using a Pedal with the MASCHINE Controller (160)3.11File Management on the MASCHINE Controller (161)4Browser (163)4.1Browser Basics (163)4.1.1The MASCHINE Library (163)4.1.2Browsing the Library vs. Browsing Your Hard Disks (164)4.2Searching and Loading Files from the Library (165)4.2.1Overview of the Library Pane (165)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (170)4.2.2.1[MK3] Browsing by Product Category Using the Controller (174)4.2.2.2[MK3] Browsing by Product Vendor Using the Controller (174)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (175)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (179)4.2.4Selecting a File Type (180)4.2.5Choosing Between Factory and User Content (181)4.2.6Selecting Type and Character Tags (182)4.2.7List and Tag Overlays in the Browser (186)4.2.8Performing a Text Search (188)4.2.9Loading a File from the Result List (188)4.3Additional Browsing Tools (193)4.3.1Loading the Selected Files Automatically (193)4.3.2Auditioning Instrument Presets (195)4.3.3Auditioning Samples (196)4.3.4Loading Groups with Patterns (197)4.3.5Loading Groups with Routing (198)4.3.6Displaying File Information (198)4.4Using Favorites in the Browser (199)4.5Editing the Files’ Tags and Properties (203)4.5.1Attribute Editor Basics (203)4.5.2The Bank Page (205)4.5.3The Types and Characters Pages (205)4.5.4The Properties Page (208)4.6Loading and Importing Files from Your File System (209)4.6.1Overview of the FILES Pane (209)4.6.2Using Favorites (211)4.6.3Using the Location Bar (212)4.6.4Navigating to Recent Locations (213)4.6.5Using the Result List (214)4.6.6Importing Files to the MASCHINE Library (217)4.7Locating Missing Samples (219)4.8Using Quick Browse (221)5Managing Sounds, Groups, and Your Project (225)5.1Overview of the Sounds, Groups, and Master (225)5.1.1The Sound, Group, and Master Channels (226)5.1.2Similarities and Differences in Handling Sounds and Groups (227)5.1.3Selecting Multiple Sounds or Groups (228)5.2Managing Sounds (233)5.2.1Loading Sounds (235)5.2.2Pre-listening to Sounds (236)5.2.3Renaming Sound Slots (237)5.2.4Changing the Sound’s Color (237)5.2.5Saving Sounds (239)5.2.6Copying and Pasting Sounds (241)5.2.7Moving Sounds (244)5.2.8Resetting Sound Slots (245)5.3Managing Groups (247)5.3.1Creating Groups (248)5.3.2Loading Groups (249)5.3.3Renaming Groups (251)5.3.4Changing the Group’s Color (251)5.3.5Saving Groups (253)5.3.6Copying and Pasting Groups (255)5.3.7Reordering Groups (258)5.3.8Deleting Groups (259)5.4Exporting MASCHINE Objects and Audio (260)5.4.1Saving a Group with its Samples (261)5.4.2Saving a Project with its Samples (262)5.4.3Exporting Audio (264)5.5Importing Third-Party File Formats (270)5.5.1Loading REX Files into Sound Slots (270)5.5.2Importing MPC Programs to Groups (271)6Playing on the Controller (275)6.1Adjusting the Pads (275)6.1.1The Pad View in the Software (275)6.1.2Choosing a Pad Input Mode (277)6.1.3Adjusting the Base Key (280)6.1.4Using Choke Groups (282)6.1.5Using Link Groups (284)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (286)6.3Playing Tools (287)6.3.1Mute and Solo (288)6.3.2Choke All Notes (292)6.3.3Groove (293)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (295)6.3.5Tap Tempo (299)6.4Performance Features (300)6.4.1Overview of the Perform Features (300)6.4.2Selecting a Scale and Creating Chords (303)6.4.3Scale and Chord Parameters (303)6.4.4Creating Arpeggios and Repeated Notes (316)6.4.5Swing on Note Repeat / Arp Output (321)6.5Using Lock Snapshots (322)6.5.1Creating a Lock Snapshot (322)6.5.2Using Extended Lock (323)6.5.3Updating a Lock Snapshot (323)6.5.4Recalling a Lock Snapshot (324)6.5.5Morphing Between Lock Snapshots (324)6.5.6Deleting a Lock Snapshot (325)6.5.7Triggering Lock Snapshots via MIDI (326)6.6Using the Smart Strip (327)6.6.1Pitch Mode (328)6.6.2Modulation Mode (328)6.6.3Perform Mode (328)6.6.4Notes Mode (329)7Working with Plug-ins (330)7.1Plug-in Overview (330)7.1.1Plug-in Basics (330)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (334)7.1.3Loading, Removing, and Replacing a Plug-in (335)7.1.3.1Browser Plug-in Slot Selection (341)7.1.4Adjusting the Plug-in Parameters (344)7.1.5Bypassing Plug-in Slots (344)7.1.6Using Side-Chain (346)7.1.7Moving Plug-ins (346)7.1.8Alternative: the Plug-in Strip (348)7.1.9Saving and Recalling Plug-in Presets (348)7.1.9.1Saving Plug-in Presets (349)7.1.9.2Recalling Plug-in Presets (350)7.1.9.3Removing a Default Plug-in Preset (351)7.2The Sampler Plug-in (352)7.2.1Page 1: Voice Settings / Engine (354)7.2.2Page 2: Pitch / Envelope (356)7.2.3Page 3: FX / Filter (359)7.2.4Page 4: Modulation (361)7.2.5Page 5: LFO (363)7.2.6Page 6: Velocity / Modwheel (365)7.3Using Native Instruments and External Plug-ins (367)7.3.1Opening/Closing Plug-in Windows (367)7.3.2Using the VST/AU Plug-in Parameters (370)7.3.3Setting Up Your Own Parameter Pages (371)7.3.4Using VST/AU Plug-in Presets (376)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (378)8Using the Audio Plug-in (380)8.1Loading a Loop into the Audio Plug-in (384)8.2Editing Audio in the Audio Plug-in (385)8.3Using Loop Mode (386)8.4Using Gate Mode (388)9Using the Drumsynths (390)9.1Drumsynths – General Handling (391)9.1.1Engines: Many Different Drums per Drumsynth (391)9.1.2Common Parameter Organization (391)9.1.3Shared Parameters (394)9.1.4Various Velocity Responses (394)9.1.5Pitch Range, Tuning, and MIDI Notes (394)9.2The Kicks (395)9.2.1Kick – Sub (397)9.2.2Kick – Tronic (399)9.2.3Kick – Dusty (402)9.2.4Kick – Grit (403)9.2.5Kick – Rasper (406)9.2.6Kick – Snappy (407)9.2.7Kick – Bold (409)9.2.8Kick – Maple (411)9.2.9Kick – Push (412)9.3The Snares (414)9.3.1Snare – Volt (416)9.3.2Snare – Bit (418)9.3.3Snare – Pow (420)9.3.4Snare – Sharp (421)9.3.5Snare – Airy (423)9.3.6Snare – Vintage (425)9.3.7Snare – Chrome (427)9.3.8Snare – Iron (429)9.3.9Snare – Clap (431)9.3.10Snare – Breaker (433)9.4The Hi-hats (435)9.4.1Hi-hat – Silver (436)9.4.2Hi-hat – Circuit (438)9.4.3Hi-hat – Memory (440)9.4.4Hi-hat – Hybrid (442)9.4.5Creating a Pattern with Closed and Open Hi-hats (444)9.5The Toms (445)9.5.1Tom – Tronic (447)9.5.2Tom – Fractal (449)9.5.3Tom – Floor (453)9.5.4Tom – High (455)9.6The Percussions (456)9.6.1Percussion – Fractal (458)9.6.2Percussion – Kettle (461)9.6.3Percussion – Shaker (463)9.7The Cymbals (467)9.7.1Cymbal – Crash (469)9.7.2Cymbal – Ride (471)10Using the Bass Synth (474)10.1Bass Synth – General Handling (475)10.1.1Parameter Organization (475)10.1.2Bass Synth Parameters (477)11Working with Patterns (479)11.1Pattern Basics (479)11.1.1Pattern Editor Overview (480)11.1.2Navigating the Event Area (486)11.1.3Following the Playback Position in the Pattern (488)11.1.4Jumping to Another Playback Position in the Pattern (489)11.1.5Group View and Keyboard View (491)11.1.6Adjusting the Arrange Grid and the Pattern Length (493)11.1.7Adjusting the Step Grid and the Nudge Grid (497)11.2Recording Patterns in Real Time (501)11.2.1Recording Your Patterns Live (501)11.2.2The Record Prepare Mode (504)11.2.3Using the Metronome (505)11.2.4Recording with Count-in (506)11.2.5Quantizing while Recording (508)11.3Recording Patterns with the Step Sequencer (508)11.3.1Step Mode Basics (508)11.3.2Editing Events in Step Mode (511)11.3.3Recording Modulation in Step Mode (513)11.4Editing Events (514)11.4.1Editing Events with the Mouse: an Overview (514)11.4.2Creating Events/Notes (517)11.4.3Selecting Events/Notes (518)11.4.4Editing Selected Events/Notes (526)11.4.5Deleting Events/Notes (532)11.4.6Cut, Copy, and Paste Events/Notes (535)11.4.7Quantizing Events/Notes (538)11.4.8Quantization While Playing (540)11.4.9Doubling a Pattern (541)11.4.10Adding Variation to Patterns (541)11.5Recording and Editing Modulation (546)11.5.1Which Parameters Are Modulatable? (547)11.5.2Recording Modulation (548)11.5.3Creating and Editing Modulation in the Control Lane (550)11.6Creating MIDI Tracks from Scratch in MASCHINE (555)11.7Managing Patterns (557)11.7.1The Pattern Manager and Pattern Mode (558)11.7.2Selecting Patterns and Pattern Banks (560)11.7.3Creating Patterns (563)11.7.4Deleting Patterns (565)11.7.5Creating and Deleting Pattern Banks (566)11.7.6Naming Patterns (568)11.7.7Changing the Pattern’s Color (570)11.7.8Duplicating, Copying, and Pasting Patterns (571)11.7.9Moving Patterns (574)11.7.10Adjusting Pattern Length in Fine Increments (575)11.8Importing/Exporting Audio and MIDI to/from Patterns (576)11.8.1Exporting Audio from Patterns (576)11.8.2Exporting MIDI from Patterns (577)11.8.3Importing MIDI to Patterns (580)12Audio Routing, Remote Control, and Macro Controls (589)12.1Audio Routing in MASCHINE (590)12.1.1Sending External Audio to Sounds (591)12.1.2Configuring the Main Output of Sounds and Groups (596)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (601)12.1.4Configuring the Master and Cue Outputs of MASCHINE (605)12.1.5Mono Audio Inputs (610)12.1.5.1Configuring External Inputs for Sounds in Mix View (611)12.2Using MIDI Control and Host Automation (614)12.2.1Triggering Sounds via MIDI Notes (615)12.2.2Triggering Scenes via MIDI (622)12.2.3Controlling Parameters via MIDI and Host Automation (623)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (631)12.2.5Sending MIDI from Sounds (632)12.3Creating Custom Sets of Parameters with the Macro Controls (636)12.3.1Macro Control Overview (637)12.3.2Assigning Macro Controls Using the Software (638)12.3.3Assigning Macro Controls Using the Controller (644)13Controlling Your Mix (646)13.1Mix View Basics (646)13.1.1Switching between Arrange View and Mix View (646)13.1.2Mix View Elements (647)13.2The Mixer (649)13.2.1Displaying Groups vs. Displaying Sounds (650)13.2.2Adjusting the Mixer Layout (652)13.2.3Selecting Channel Strips (653)13.2.4Managing Your Channels in the Mixer (654)13.2.5Adjusting Settings in the Channel Strips (656)13.2.6Using the Cue Bus (660)13.3The Plug-in Chain (662)13.4The Plug-in Strip (663)13.4.1The Plug-in Header (665)13.4.2Panels for Drumsynths and Internal Effects (667)13.4.3Panel for the Sampler (668)13.4.4Custom Panels for Native Instruments Plug-ins (671)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (675)13.5Controlling Your Mix from the Controller (677)13.5.1Navigating Your Channels in Mix Mode (678)13.5.2Adjusting the Level and Pan in Mix Mode (679)13.5.3Mute and Solo in Mix Mode (680)13.5.4Plug-in Icons in Mix Mode (680)14Using Effects (681)14.1Applying Effects to a Sound, a Group or the Master (681)14.1.1Adding an Effect (681)14.1.2Other Operations on Effects (690)14.1.3Using the Side-Chain Input (692)14.2Applying Effects to External Audio (695)14.2.1Step 1: Configure MASCHINE Audio Inputs (695)14.2.2Step 2: Set up a Sound to Receive the External Input (698)14.2.3Step 3: Load an Effect to Process an Input (700)14.3Creating a Send Effect (701)14.3.1Step 1: Set Up a Sound or Group as Send Effect (702)14.3.2Step 2: Route Audio to the Send Effect (706)14.3.3 A Few Notes on Send Effects (708)14.4Creating Multi-Effects (709)15Effect Reference (712)15.1Dynamics (713)15.1.1Compressor (713)15.1.2Gate (717)15.1.3Transient Master (721)15.1.4Limiter (723)15.1.5Maximizer (727)15.2Filtering Effects (730)15.2.1EQ (730)15.2.2Filter (733)15.2.3Cabinet (737)15.3Modulation Effects (738)15.3.1Chorus (738)15.3.2Flanger (740)15.3.3FM (742)15.3.4Freq Shifter (743)15.3.5Phaser (745)15.4Spatial and Reverb Effects (747)15.4.1Ice (747)15.4.2Metaverb (749)15.4.3Reflex (750)15.4.4Reverb (Legacy) (752)15.4.5Reverb (754)15.4.5.1Reverb Room (754)15.4.5.2Reverb Hall (757)15.4.5.3Plate Reverb (760)15.5Delays (762)15.5.1Beat Delay (762)15.5.2Grain Delay (765)15.5.3Grain Stretch (767)15.5.4Resochord (769)15.6Distortion Effects (771)15.6.1Distortion (771)15.6.2Lofi (774)15.6.3Saturator (775)15.7Perform FX (779)15.7.1Filter (780)15.7.2Flanger (782)15.7.3Burst Echo (785)15.7.4Reso Echo (787)15.7.5Ring (790)15.7.6Stutter (792)15.7.7Tremolo (795)15.7.8Scratcher (798)16Working with the Arranger (801)16.1Arranger Basics (801)16.1.1Navigating Song View (804)16.1.2Following the Playback Position in Your Project (806)16.1.3Performing with Scenes and Sections using the Pads (807)16.2Using Ideas View (811)16.2.1Scene Overview (811)16.2.2Creating Scenes (813)16.2.3Assigning and Removing Patterns (813)16.2.4Selecting Scenes (817)16.2.5Deleting Scenes (818)16.2.6Creating and Deleting Scene Banks (820)16.2.7Clearing Scenes (820)16.2.8Duplicating Scenes (821)16.2.9Reordering Scenes (822)16.2.10Making Scenes Unique (824)16.2.11Appending Scenes to Arrangement (825)16.2.12Naming Scenes (826)16.2.13Changing the Color of a Scene (827)16.3Using Song View (828)16.3.1Section Management Overview (828)16.3.2Creating Sections (833)16.3.3Assigning a Scene to a Section (834)16.3.4Selecting Sections and Section Banks (835)16.3.5Reorganizing Sections (839)16.3.6Adjusting the Length of a Section (840)16.3.6.1Adjusting the Length of a Section Using the Software (841)16.3.6.2Adjusting the Length of a Section Using the Controller (843)16.3.7Clearing a Pattern in Song View (843)16.3.8Duplicating Sections (844)16.3.8.1Making Sections Unique (845)16.3.9Removing Sections (846)16.3.10Renaming Scenes (848)16.3.11Clearing Sections (849)16.3.12Creating and Deleting Section Banks (850)16.3.13Working with Patterns in Song view (850)16.3.13.1Creating a Pattern in Song View (850)16.3.13.2Selecting a Pattern in Song View (850)16.3.13.3Clearing a Pattern in Song View (851)16.3.13.4Renaming a Pattern in Song View (851)16.3.13.5Coloring a Pattern in Song View (851)16.3.13.6Removing a Pattern in Song View (852)16.3.13.7Duplicating a Pattern in Song View (852)16.3.14Enabling Auto Length (852)16.3.15Looping (853)16.3.15.1Setting the Loop Range in the Software (854)16.4Playing with Sections (855)16.4.1Jumping to another Playback Position in Your Project (855)16.5Triggering Sections or Scenes via MIDI (856)16.6The Arrange Grid (858)16.7Quick Grid (860)17Sampling and Sample Mapping (862)17.1Opening the Sample Editor (862)17.2Recording Audio (863)17.2.1Opening the Record Page (863)17.2.2Selecting the Source and the Recording Mode (865)17.2.3Arming, Starting, and Stopping the Recording (868)17.2.5Using the Footswitch for Recording Audio (871)17.2.6Checking Your Recordings (872)17.2.7Location and Name of Your Recorded Samples (876)17.3Editing a Sample (876)17.3.1Using the Edit Page (877)17.3.2Audio Editing Functions (882)17.4Slicing a Sample (890)17.4.1Opening the Slice Page (891)17.4.2Adjusting the Slicing Settings (893)17.4.3Live Slicing (898)17.4.3.1Live Slicing Using the Controller (898)17.4.3.2Delete All Slices (899)17.4.4Manually Adjusting Your Slices (899)17.4.5Applying the Slicing (906)17.5Mapping Samples to Zones (912)17.5.1Opening the Zone Page (912)17.5.2Zone Page Overview (913)17.5.3Selecting and Managing Zones in the Zone List (915)17.5.4Selecting and Editing Zones in the Map View (920)17.5.5Editing Zones in the Sample View (924)17.5.6Adjusting the Zone Settings (927)17.5.7Adding Samples to the Sample Map (934)18Appendix: Tips for Playing Live (937)18.1Preparations (937)18.1.1Focus on the Hardware (937)18.1.2Customize the Pads of the Hardware (937)18.1.3Check Your CPU Power Before Playing (937)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (938)18.1.5Consider Using a Limiter on Your Master (938)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (938)18.1.7Improvise (938)18.2Basic Techniques (938)18.2.1Use Mute and Solo (938)18.2.2Use Scene Mode and Tweak the Loop Range (939)18.2.3Create Variations of Your Drum Patterns in the Step Sequencer (939)18.2.4Use Note Repeat (939)18.2.5Set Up Your Own Multi-effect Groups and Automate Them (939)18.3Special Tricks (940)18.3.1Changing Pattern Length for Variation (940)18.3.2Using Loops to Cycle Through Samples (940)18.3.3Using Loops to Cycle Through Samples (940)18.3.4Load Long Audio Files and Play with the Start Point (940)19Troubleshooting (941)19.1Knowledge Base (941)19.2Technical Support (941)19.3Registration Support (942)19.4User Forum (942)20Glossary (943)Index (951)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE Getting Started: This document provides a practical approach to MASCHINE viaa set of tutorials covering easy and more advanced tasks in order to help you familiarizeyourself with MASCHINE.2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:▪Controller Editor Manual: Besides using your MASCHINE hardware controller together withits dedicated MASCHINE software, you can also use it as a powerful and highly versatileMIDI controller to pilot any other MIDI-capable application or device. This is made possibleby the Controller Editor software, an application that allows you to precisely define all MIDIassignments for your MASCHINE controller. The Controller Editor was installed during theMASCHINE installation procedure. For more information on this, please refer to the Con-troller Editor Manual available as a PDF file via the Help menu of Controller Editor.▪Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues. The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information can be expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software and paths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in the software is printed in blue. Whenever you see this formatting applied, you will find the same text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you see this formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you see this formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.Unlabeled Buttons on the ControllerThe buttons and knobs above and below the displays on your MASCHINE controller do not have labels.。
LightTools 光学模拟软件说明书
Core ModuleGeometry Creation and Editing• Lens primitives (rectangular or circular apertures)• Spline sweep and patch surfaces• Polyline sweeps and extrusions• Conic trough and revolved reflectors• Cylinders, blocks, spheres, toroids, and skinned solids• Union, intersection, subtraction boolean operations• Object trim operation• Move, rotate, scale, align• Copy, rectangular, and circular pattern copy• Multiple and partial immersion and cementing for solid objects• Pickups for parametric modeling• Grouping of model entitiesOptical Properties• Specular reflection/transmission/TIR with Fresnel losses• Diffuse transmission/reflection• Scatter models: mixed diffuse, narrow angle, and angle of incidence (AOI)• Volume scattering (Mie, user defined)• Scattering aim regions• User-defined coatings• Probabilistic ray splitting and importance sampling• Constant or varying optical density or transmittance vs. length• Index of refraction (constant, interpolated, standard dispersion formulas)• Surface patterns of 2D or 3D elements• Photorealistic rendering (Illumination Module needed for lit appearance)User Interface and Other Features• ActiveX interface for macro programming in MS Excel, VB, VC++, Matlab, Mathematica, and others • OpenGL-rendered graphics• Tabbed windows and editable spreadsheets• Multiple design views and navigation windows• Point-and-click, copy-and-paste, moving and resizing of windows• Extensive help featuresPoint-and-Shoot Ray Tracing• Parallel, diverging, or converging sets of rays• Individual rays, 2D ray fans, 3D ray grids• Sequential and non-sequential ray propagationLibraries• LED sources• Display films• Application and feature examplesIllumination ModulePowerful illumination analysis capabilities, such as photorealistic renderings that show the luminance effects of light sources in the model, simulate real-world conditions and reduce the need for physical prototypes.Illumination Analysis• Photorealistic Rendering• Photometric or radiometric analysis using forward and backward ray tracing• Illuminance, luminance, luminous intensity• Line charts, raster, contour, and surface charts• Colorimetric analysis: 1931 and 1976 CIE coordinates, correlated color temperature• RGB output display, CIE chromaticity chart• Post-processing of output data• Receiver data filtering using over a dozen filter types• Encircled and ensquared energy• Spectral power distribution• Multi-CPU processingSources and Receivers• Point sources• Volume and surface emitters (spheres, cylinders, blocks, toroids)• User-defined spatial, volume, and angular distributions• Source emittance aim regions• Spectral distributions: Blackbody, Gaussian, continuous, discrete, and user defined• Angular and spatial importance sampling• Ray data sources and Radiant Imaging source model support• Surface and far field receivers• Angular and spatial luminance meters• Receiver aperture sub-samplingOptimization ModuleThe Optimization Module gives designers tremendous flexibility to choose from hundreds of system parameters to designate as variables, constraints, and performance criteria in order to achieve the desired system performance.Illumination Optimization• Optimize illumination uniformity and/or flux on a receiver• Match target illumination distributions• Collimate and focus merit functions for non-sequential rays• Lagrange constraint handling• User-defined variables, constraints, and performance criteria• Vary any floating point model parameter• User-defined combinations of parameters• Bounded and unbounded variables• Backlight pattern optimization utility• Parameter sensitivity utility• Point-and-shoot ray merit functionsAdvanced Design ModuleThe Advanced Design Module leverages proprietary algorithms from Synopsys’ LucidShape products that automatically calculate and construct optical geometries based on user-defined illuminance and intensity patterns. This unique, functional approach gives designers the freedom to focus on overall design objectives rather than the implementation details of complex optical components.• Freeform Design features for modeling freeform reflective and refractive surfaces that are automatically shaped to form the resulting light pattern.• MacroFocal Reflector tool for designing multi-surface segmented reflectors, with different spreads for each facet.• Procedural Rectangle Lens tool for designing surfaces with pillowed optical arrays.• LED Lens tool for creating various types of freeform LED collimator lenses.Advanced Physics Module• Designers can take advantage of programming extensions to develop custom optical parts and advanced illumination subsystems using:• Phosphor particle modeling (single and multiple)• Gradient Index (GRIN) materials - used in copiers, scanners, and fiber optic telecommunication systems.• User-defined optical properties (UDOPs) - such as proprietary polarization components, scatterers, coatings, and other specialty optical materials.• Birefringent (uniaxial) materials - used in advanced applications such as AR/VR headsets and biomedical instruments.The results for UDOPs and birefringent materials can be packaged into a portable format and exchanged with your project team, customers, suppliers, and subcontractors.SOLIDWORKS Link ModuleThe SOLIDWORKS Link Module enables you to link SOLIDWORKS 3D opto-mechanical models to LightTools, where you can assign optical properties and use the Optimization Module to optimize your design. This module provides complete parametric interoperability between LightTools models and SOLIDWORKS.Data Exchange ModulesSupporting features for the Data Exchange Modules include the ability to group and simplify imported geometry and perform geometry repairs to maintain CAD model integrity and improve ray trace speed.Translators• SAT version 1.0 through 7.0• STEP AP 203 and AP 214• IGES version 5.3, including surfaces and solids• Parasolid• CATIA V4 and V5 (import and export)• Grouping and simplification of imported surfaces• Geometry repairLightTools SmartStart Library ModuleProvides access to a library of materials and media commonly used in the design of automotive lighting systems. Includes refractive index and absorption data as well as pre-defined volume scatter and BSDF materials.Imaging Path Module• Sequential ray tracing• Paraxial solves• Image path view• Spot diagram and transverse aberration plotsDistributed Simulation ModuleThe Distributed Simulation Module allows you to distribute Monte Carlo ray tracing over multiple computers to speed simulations of complex optical models.©2022 Synopsys, Inc. All rights reserved. Synopsys is a trademark of Synopsys, Inc. in the United States and other countries. A list of Synopsys trademarks isavailable at /copyright.html . All other names mentioned herein are trademarks or registered trademarks of their respective owners.。
ECI XDM常用告警说明

xdm 告警列表1.传输告警Span Loss Change(Minor):Span可以理解为两个站点功率监控点之间的总衰耗。
当之间的衰耗值变化范围超出允许的门限时(默认设置为0.5dB),就会出现此告警。
处理之前需要确认一下告警的产生是否暂时的。
这种情况多出现于调试阶段,经常会关闭和开启某个OTU单元的激光器导致站点之间的衰耗值出现变化。
类似的此种情况在恢复后告警自动消失。
如果是由于光缆衰耗割接等引起的一些不可恢复性的衰耗,就需要将放大器的GAIN增益调整到新的数值以适应新的链路状态。
具体的做法只需打开Gain窗口,Adopt然后Apply就可以了。
Out of Tracking Limitation(Major):放大器的自动跟踪功率变化有个范围,默认为0.5~3dB,一当超出这个范围,就会有告警,同时还会伴随Span Loss Change。
由于此时功率变化的范围比较大,必须要认真检查是否线路的衰耗或者板卡等有故障。
例如光纤插拔之后没有复原到位,或者增加或减少了波道的输入。
如果是由于光缆割接引起的光缆衰耗的增加和减少,意味着没有办法回到系统初始的状态,整个时候同样也可以改变放大器的Gain来消除告警。
Out Of SetCapability(Major):放大器的增益是有限的,同时自动跟踪功率变化也有一个限度。
放大器其实是通过调节自身之前的可调衰耗值来调节在线路中的增益的。
当线路衰耗的变化无法使得放大器调整到合适的增益以满足要求的输出功率的时候,就会有此告警。
此时需要建议客户能否将线路的衰耗尽量恢复到初始值。
如果不行,只能将放大器的既定输出更改到合适的值。
保证放大器能1.2.Transmission alarms related to Ethernet and L22.3.Service Alarms4.Timing alarms5.。
mcpa告警指导书

7600 BCF FAULTY
ESMx System module has lost connection to all modules on
TRX object allocation failed in RF module
TRX object allocation failed in RF module
01 00 00 82 00 00 TRX分配射频模块失败
0C 08 00 83 11 32 RSSI检测接收信号的差超过阈值
(54151) 7601 BCF OPERATION DEGRADED
RF模块检测到的反馈信号丢失的TX
7600 BCF FAULTY
ESMx System module has lost connection to all modules on
(54563) 7607 TRX OPERATION DEGRADED
RSSI detected Rx signal difference exceeding threshold
RF module software updated and waiting restart
00 00 00 84 22 00 射频模块的软件更新,等待重启
15637002189凌敏
7600 BCF FAULTY
7606/7607 ** ESMx System module has lost connection to RF module 系统模块连接射频模块失败
7603 BTS FAULTY
ESMx System module has lost connection to FSEx External Alarm
Infoprint 250 導入と計画の手引き 第 7 章ホスト
SUBNETMASK
255.255.255.128
Type of service...............: TOS
*NORMAL
Maximum transmission unit.....: MTU
*LIND
Autostart.....................:
AUTOSTART
*YES
: xx.xxx.xxx.xxx
: xx.xxx.xxx.xxx
*
(
)
IEEE802.3
60 1500
: xxxx
48 Infoprint 250
31. AS/400
IP
MTU
1
1
IPDS TCP
CRTPSFCFG (V3R2)
WRKAFP2 (V3R1 & V3R6)
RMTLOCNAME RMTSYS
MODEL
0
Advanced function printing............:
AFP
*YES
AFP attachment........................:
AFPATTACH
*APPC
Online at IPL.........................:
ONLINE
FORMFEED
*CONT
Separator drawer......................:
SEPDRAWER
*FILE
Separator program.....................:
SEPPGM
*NONE
Library.............................:
fluent问题解决方法
的正确性需要谁来验证?反复的试验?
问题:比较两种耦合算法的性能,怎样把二者的 RESIDUAL HISTORY 放到一张图上呢? RESIDUAL 中没有 WRITE FILE 这一选项呀?
答:计算完毕以后,首先把二者的 RESIDUAL HISTORY 图拷贝下来,然后可以放到一张图上 编辑
用 Tecplot 显示 Fluent 计算的轴对称流场,请问如何把对称轴的下面一般流场显示出 来?Fluent 保存的流场数据和网格都是只有上半流场的。 答:复制一下上半场(Create Zone),把 Y 的符号反号一下就可以了(Equation)。 另外最简单的办法,自己写一段小程序,将数据复制一份,之后反号。
对于流体力学试验、数值模拟、理论研究的关系,本人以为应当从哲学的方面借以揭示。 因为我们是在蒙着眼睛过河,我们面对的是不清楚的事实,通过观察,测量,得到数据, 然后用自己接受的一套规律把它理解,最后依靠这套规律来预测、解释和研究这个事实。 我们都是被动的在接受存在的事物。这就像哲学上的认识论,人类的知识总是在不断增加, 但最终能够完全认识整个宇宙吗?恐怕没有答案。人们对流体的认识不断加深,但最终能 够完全用数学描述流体吗?不可能。那我们做理论来做什么?为了尽可能的了解,而作数 模则是在尽可能了解的基础上做近似,用求解通过观察获得的理论的方法来反演事实。这 肯定是不准确的,但如果方法正确,应该是近似准确的。就像很简单的两个球,假定他们 是绝对刚体,则我们的动量定理可以发挥作用,但刚体并不存在。所以我们的认识是错误 的,但却在一定条件下接近正确。所以说,做数值模拟的最终结果需要试验来验证,但试验
用于生成流场的边界,已有了这根曲线上足够多点的坐标了。然后想用 CAD 做,完了再导 入到 Gambit 里面,但是结果导入后发现曲线被分成了很多段,怎么让它连接成一根光滑的 线呢? 另外好像 CAD 里面只能导出 region,单单一根线怎么导出的?
Rossby波光路追踪V0.6.0用户指南说明书
Package‘raytracing’October14,2022Title Rossby Wave Ray TracingVersion0.6.0Date2022-06-06Description Rossby wave ray paths are traced froma determined source,specified wavenumber,and directionof propagation.``raytracing''also works with a set ofexperiments changing these parameters,making possible theidentification of Rossby wave sources automatically.The theory used here is based on classical studies,such as Hoskins and Karoly(1981)<doi:10.1175/1520-0469(1981)038%3C1179:TSLROA%3E2.0.CO;2>,Karoly(1983)<doi:10.1016/0377-0265(83)90013-1>,Hoskins and Ambrizzi(1993)<doi:10.1175/1520-0469(1993)050%3C1661:RWPOAR%3E2.0.CO;2>,and Yang and Hoskins(1996)<doi:10.1175/1520-0469(1996)053%3C2365:PORWON%3E2.0.CO;2>.License GPL-3Encoding UTF-8LazyData noImports ncdf4,graphics,sf,units,utilsSuggests testthat,covr,lwgeomURL https:///salvatirehbein/raytracing/BugReports https:///salvatirehbein/raytracing/issues/ RoxygenNote7.2.0Depends R(>=3.5.0)NeedsCompilation noAuthor Amanda Rehbein[aut,cre](<https:///0000-0002-8714-7931>), Tercio Ambrizzi[sad],Sergio Ibarra-Espinosa[ctb](<https:///0000-0002-3162-1905>), Lívia Márcia Mosso Dutra[rtm]Maintainer Amanda Rehbein<*********************>1Repository CRANDate/Publication2022-06-0623:30:02UTCR topics documented:betaks (2)betam (4)coastlines (6)Ks (6)Ktotal (7)ray (9)raytracing (11)ray_path (12)ray_source (13)trin (15)wave_arrival (16)ypos (17)Index18 betaks Calculates Beta and KsDescriptionbetaks ingests the time-mean zonal wind(u),transform it in mercator coordinates(um);calculates the meridional gradient of the absolute vorticity(beta)in mercator coordinates(betam);and,finally, calculates stationary wavenumber(Ks)in mercator coordinates(ksm)(see:Hoskins and Ambrizzi, 1993).betaks returns the um,betam,and lat,for being ingested in ray or ray_source.Usagebetaks(u,lat="lat",lon="lon",uname="uwnd",ofile,a=6371000,plots=FALSE,show.warnings=FALSE)Argumentsu String indicating the input datafilename.Thefile to be passed consists in a netCDFfile with only time-mean zonal wind at one pressure level,latitude inascending order(not a requisite),and longitude from0to360.It is requiredthat the read dimensions express longitude(in rows)x latitude(in columns).ualso can be a numerical matrix with time-mean zonal wind at one pressure level,latitude in ascending order(not a requisite),and longitude from0to360.Itis required that the read dimensions express longitude(in rows)x latitude(incolumns).lat String indicating the name of the latitudefield.If u is a matrix,lat must be numeric.lon String indicating the name of the longitudefield.If u is a matrix,lon must be numeric from0to360.uname String indicating the variable namefieldofile String indicating thefile name for store output data.If missing,will not return a netCDFfilea Numeric indicating the Earth’s radio(m)plots Logical,if TRUE will producefilled.countour plotsshow.warnings Logical,if TRUE will warns about NaNs in sqrt(<0)Valuelist with one vector(lat)and3matrices(um,betam,and ksm)Examples{#u is NetCDF and lat and lon charactersinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betaks(u=input,plots=TRUE)b$ksm[]<-ifelse(b$ksm[]>=16|b$ksm[]<=0,NA,b$ksm[])cores<-c("#ff0000","#ff5a00","#ff9a00","#ffce00","#f0ff00")graphics::filled.contour(b$ksm[,-c(1:5,69:73)],col=rev(colorRampPalette(cores,bias=0.5)(20)),main="Ks")#u,lat and lon as numericinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.bin",package="raytracing")u<-readBin(input,what=numeric(),size=4,n=144*73*4)lat<-seq(-90,90,2.5)lon<-seq(-180,180-1,2.5)u<-matrix(u,nrow=length(lon),ncol=length(lat))graphics::filled.contour(u,main="Zonal Wind Speed[m/s]")b<-betaks(u,lat,lon)b$ksm[]<-ifelse(b$ksm[]>=16|b$ksm[]<=0,NA,b$ksm[])cores<-c("#ff0000","#ff5a00","#ff9a00","#ffce00","#f0ff00")graphics::filled.contour(b$ksm[,-c(1:5,69:73)],col=rev(colorRampPalette(cores,bias=0.5)(20)),main="Ks")}betam Calculates Meridional Gradient of the Absolute Vorticity(beta)inmercator coordinates(betam)Descriptionbetam ingests the time-mean zonal wind(u),transform it in mercator coordinates(um)and then calculates the meridional gradient of the absolute vorticity(beta)in mercator coordinates(betam) using equation Karoly(1983).betam returns a list with the u,betam,and lat for being ingested in Ktotal,Ks,ray or ray_source.Usagebetam(u,lat="lat",lon="lon",uname="uwnd",ofile,a=6371000,plots=FALSE,show.warnings=FALSE)Argumentsu String indicating the input datafilename.Thefile to be passed consists in a netCDFfile with only time-mean zonal wind at one pressure level,latitude inascending order(not a requisite),and longitude from0to360.It is requiredthat the read dimensions express longitude(in rows)x latitude(in columns).ualso can be a numerical matrix with time-mean zonal wind at one pressure level,latitude in ascending order(not a requisite),and longitude from0to360.Itis required that the read dimensions express longitude(in rows)x latitude(incolumns).lat String indicating the name of the latitudefield.If u is a matrix,lat must be numeric.lon String indicating the name of the longitudefield.If u is a matrix,lon must be numeric from0to360.uname String indicating the variable namefieldofile String indicating thefile name for store output data.If missing,it will not returna netCDFfilea Numeric indicating the Earth’s radio(m)plots Logical,if TRUE will producefilled.countour plotsshow.warnings Logical,if TRUE will warns about NaNs in sqrt(<0)Valuelist with one vector(lat)and2matrices(u and betam)Examples{#u is NetCDF and lat and lon charactersinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betam(u=input,plots=TRUE)cores<-c("#ff0000","#ff5a00","#ff9a00","#ffce00","#f0ff00")graphics::filled.contour(b$betam/10e-12,zlim=c(0,11),col=rev(colorRampPalette(cores)(24)),main="Beta Mercator(*10e-11)")#u,lat and lon as numericinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.bin",package="raytracing")u<-readBin(input,what=numeric(),size=4,n=144*73*4)lat<-seq(-90,90,2.5)lon<-seq(-180,180-1,2.5)u<-matrix(u,nrow=length(lon),ncol=length(lat))graphics::filled.contour(u,main="Zonal Wind Speed[m/s]")}6Ks coastlines CoastlinesDescriptionGeometry of coastlines,class"sfc_MULTILINESTRING""sfc"from the package"sf"Usagedata(coastlines)FormatGeometry of coastlines"sfc_MULTILINESTRING"MULTILINESTRING Geometry of coastlines"sfc_MULTILINESTRING"data(coastlines)Sourcehttps:///downloads/10m-physical-vectors/10m-coastline/ Ks Calculates Total Wavenumber for Stationary Rossby Waves(Ks)DescriptionKs ingests the time-mean zonal wind(u)and calculates the Total Wavenumber for Stationary Rossby waves(Ks)in mercator coordinates(see:Hoskins and Ambrizzi,1993).Stationary Rossby waves are found when zonal wave number(k)is constant along the trajectory,which leads to wave fre-quency(omega)zero.In this code Ks is used to distinguish the total wavenumber for Stationary Rossby Waves(Ks)from the total wavenumber for Rossby waves(K),and zonal wave number(k).Ks returns a list with Ks in mercator coordinates(ksm).UsageKs(u,lat="lat",lon="lon",uname="uwnd",ofile,a=6371000,plots=FALSE,show.warnings=FALSE)Argumentsu String indicating the input datafilename.Thefile to be passed consists in a netCDFfile with only time-mean zonal wind at one pressure level,latitude inascending order(not a requisite),and longitude from0to360.It is requiredthat the read dimensions express longitude(in rows)x latitude(in columns).ualso can be a numerical matrix with time-mean zonal wind at one pressure level,latitude in ascending order(not a requisite),and longitude from0to360.Itis required that the read dimensions express longitude(in rows)x latitude(incolumns).lat String indicating the name of the latitudefield.If u is a matrix,lat must be numeric.lon String indicating the name of the longitudefield.If u is a matrix,lon must be numeric from0to360.uname String indicating the variable namefieldofile String indicating thefile name for store output data.If missing,will not return a netCDFfilea Numeric indicating the Earth’s radio(m)plots Logical,if TRUE will producefilled.countour plotsshow.warnings Logical,if TRUE will warns about NaNs in sqrt(<0)Valuelist with one vector(lat)and1matrix(Ksm)Examples{#u is NetCDF and lat and lon charactersinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")Ks<-Ks(u=input,plots=TRUE)Ks$ksm[]<-ifelse(Ks$ksm[]>=16|Ks$ksm[]<=0,NA,Ks$ksm[])cores<-c("#ff0000","#ff5a00","#ff9a00","#ffce00","#f0ff00")graphics::filled.contour(Ks$ksm[,-c(1:5,69:73)],col=rev(colorRampPalette(cores,bias=0.5)(20)),main="Ks")}Ktotal Calculates Total Wavenumber for Rossby Waves(K)DescriptionKtotal ingests the time-mean zonal wind(u)and calculates the Rossby wavenumber(K)(non-zero frequency waves)in mercator coordinates.In this code Ktotal is used to distinguish the total wavenumber(K)from zonal wave number(k).For stationary Rossby Waves,please see Ks.Ktotal returns a list with K in mercator coordinates(ktotal_m).UsageKtotal(u,lat="lat",lon="lon",uname="uwnd",cx,ofile,a=6371000,plots=FALSE,show.warnings=FALSE)Argumentsu String indicating the input datafilename.Thefile to be passed consists in a netCDFfile with only time-mean zonal wind at one pressure level,latitude inascending order(not a requisite),and longitude from0to360.It is requiredthat the read dimensions express longitude(in rows)x latitude(in columns).ualso can be a numerical matrix with time-mean zonal wind at one pressure level,latitude in ascending order(not a requisite),and longitude from0to360.Itis required that the read dimensions express longitude(in rows)x latitude(incolumns).lat String indicating the name of the latitudefield.If u is a matrix,lat must be numericlon String indicating the name of the longitudefield.If u is a matrix,lon must be numeric from0to360.uname String indicating the variable namefieldcx numeric.Indicates the zonal phase speed.Must be greater than zero.For cx equal to zero(stationary waves see Ks)ofile String indicating thefile name for store output data.If missing,will not return a netCDFfilea Numeric indicating the Earth’s radio(m)plots Logical,if TRUE will producefilled.countour plotsshow.warnings Logical,if TRUE will warns about NaNs in sqrt(<0)Valuelist with one vector(lat)and1matrix(ktotal_m)ray9 Examples{#u is NetCDF and lat and lon charactersinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")Ktotal<-Ktotal(u=input,cx=6,plots=TRUE)cores<-c("#ff0000","#ff5a00","#ff9a00","#ffce00","#f0ff00")graphics::filled.contour(Ktotal$ktotal_m[,-c(1:5,69:73)],col=rev(colorRampPalette(cores,bias=0.5)(20)),main="K")}ray Calculates the Rossby waves ray pathsDescriptionray returns the Rossby wave ray paths(lat/lon)triggered from one initial source/position(x0,y0), one total wavenumber(K),and one direction set up when invoking the function.ray must ingest the meridional gradient of the absolute vorticity in mercator coordinates betam,the zonal mean wind u,and the latitude vector(lat).Those variables can be obtained(recommended)using betaks function.The zonal means of the basic state will be calculated along the ray program,as well as the conversion to mercator coordinates of u.Usageray(betam,u,lat,x0,y0,K,dt,itime,direction,cx=0,interpolation="trin",tl=1,a=6371000,verbose=FALSE,ofile)10rayArgumentsbetam matrix(longitude=rows x latitude from minor to major=columns)obtained with betaks.betam is the meridional gradient of the absolute vorticity in mer-cator coordinatesu matrix(longitude=rows x latitude from minor to major=columns)obtained with betaks.Is the zonal wind speed in the appropriate format for the ray.Itwill be converted in mercator coordinates inside the raylat Numeric vector of latitudes from minor to major(ex:-90to90).Obtained with betaksx0Numeric value.Initial longitude(choose between-180to180)y0Numeric value.Initial latitudeK Numeric value;Total Rossby wavenumberdt Numeric value;Timestep for integration(hours)itime Numeric value;total integration time.For instance,10days times4times per daydirection Numeric value(possibilities:1or-1)It controls the wave displacement:If1, the wave goes to the north of the source;If-1,the wave goes to the south of thesource.cx numeric.Indicates the zonal phase speed.The program is designed for eastward propagation(cx>0)and stationary waves(cx=0,the default).interpolation Character.Set the interpolation method to be used:trin or ypostl Numeric value;Turning latitude.Do not change this!It will always start with a positive tl(1)and automatically change to negative(-1)after the turning latitudea Earth’s radio(m)verbose Boolean;if TRUE(default)return messages during compilationofile Character;Outputfile name with.csv extension,for instance,"/user/ray.csv"Valuesf data.frameSee Alsoray_sourceExamples{#For Coelho et al.(2015):input<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betaks(u=input)rt<-ray(betam=b$betam,u=b$u,raytracing11 lat=b$lat,K=3,itime=10*4,x0=-130,y0=-30,dt=6,direction=-1,cx=0,interpolation="trin")rp<-ray_path(rt$lon,rt$lat)plot(rp,main="Coelho et al.(2015):JFM/2014",axes=TRUE,cex=2,graticule=TRUE)}raytracing raytracing:Rossby Wave Ray TracingDescriptionRossby wave ray paths are traced from a determined source,specified wavenumber,and direction ofpropagation.’raytracing’also works with a set of experiments changing these parameters,makingpossible the identification of Rossby wave sources automatically.Authors•Amanda Rehbein(ORCID:https:///0000-0002-8714-7931-mantainer:*********************)•Tercio Ambrizzi(ORCID:https:///0000-0001-8796-7326)•Sergio Ibarra Espinosa(ORCID:https:///0000-0002-3162-1905)•Livia Marcia Mosso Dutra(ORCID:https:///0000-0002-1349-7138)ReferencesHoskins,B.J.,&Ambrizzi,T.(1993).Rossby wave propagation on a realistic longitudinallyvaryingflow.Journal of the Atmospheric Sciences,50(12),1661-1671.Hoskins,B.J.,&Karoly,D.J.(1981).The steady linear response of a spherical atmosphere tothermal and orographic forcing.Journal of the Atmospheric Sciences,38(6),1179-1196.Karoly,D.J.(1983).Rossby wave propagation in a barotropic atmosphere.Dynamics of Atmo-spheres and Oceans,7(2),111-125.Yang,G.Y.,&Hoskins,B.J.(1996).Propagation of Rossby waves of nonzero frequency.Journalof the atmospheric sciences,53(16),2365-2378.12ray_path ray_path Calculate the ray paths/segment of great circlesDescriptionThis function calculates the segments great circles using the(lat,lon)coordinates obtained with ray or ray_source.It returns a LINESTRING geometry that is ready for plot.Usageray_path(x,y)Argumentsx vector with the longitude obtained with ray or ray_sourcey vector with the latitude obtained with ray or ray_sourceValuesfc_LINESTRING sfcExamples{#Coelho et al.(2015):input<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betaks(u=input)rt<-ray(betam=b$betam,u=b$u,lat=b$lat,K=3,itime=30,x0=-135,y0=-30,dt=6,direction=-1)rp<-ray_path(x=rt$lon,y=rt$lat)plot(rp,axes=TRUE,graticule=TRUE)}ray_source Calculate the Rossby waves ray paths over a source regionDescriptionray_source returns the Rossby wave ray paths(lat/lon)triggered from one or more initial source/position (x0,y0),one or more total wavenumber(K),and one or more direction set up when invoking the function.ray_source must ingest the meridional gradient of the absolute vorticity in mercator coordinates betam,the zonal mean wind u,and the latitude vector(lat).Those variables can be obtained(recommended)using betaks function.The zonal means of the basic state will be calcu-lated along the ray program,as well as the conversion to mercator coordinates of u.The resultant output is a spatial feature object from a combination of initial andfinal positions/sources,total wavenumbers(K),and directions.Usageray_source(betam,u,lat,x0,y0,K,cx,dt,itime,direction,interpolation="trin",tl=1,a=6371000,verbose=FALSE,ofile)Argumentsbetam matrix(longitude=rows x latitude from minor to major=columns)obtainedwith betaks.betam is the meridional gradient of the absolute vorticity in mer-cator coordinatesu matrix(longitude=rows x latitude from minor to major=columns)obtainedwith betaks.Is the zonal wind speed in the appropriate format for the ray.Itwill be converted in mercator coordinates inside the raylat Numeric vector of latitudes from minor to major(ex:-90to90).Obtained withbetaksx0Vector with the initial longitudes(choose between-180to180)y0Vector with the initial latitudesK Vector;Total Rossby wavenumbercx numeric.Indicates the zonal phase speed.The program is designed for eastward propagation(cx>0)and stationary waves(cx=0,the default).dt Numeric value;Timestep for integration(hours)itime Numeric value;total integration time.For instance,10days times4times per daydirection Vector with two possibilities:1or-1It controls the wave displacement:If1, the wave goes to the north of the source;If-1,the wave goes to the south of thesource.interpolation Character.Set the interpolation method to be used:trin or ypostl Numeric value;Turning latitude.Do not change this!It will always start with a positive tl(1)and automatically change to negative(-1)after the turning latitude.a Earth’s radio(m)verbose Boolean;if TRUE(default)return messages during compilationofile Character;Outputfile name with.csv extension,for instance,"/user/ray.csv"Valuesf data.frameExamples##Not run:#do not runinput<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betaks(u=input)rt<-ray_source(betam=b$betam,u=b$u,lat=b$lat,K=3,itime=10*4,cx=0,x0=-c(130,135),y0=-30,dt=6,direction=-1,interpolation="trin")#Plot:data(coastlines)plot(coastlines,reset=FALSE,axes=TRUE,graticule=TRUE,col="grey",main="Coelho et al.(2015):JFM/2014")trin15 plot(rt[sf::st_is(rt,"LINESTRING"),]["lon_ini"],add=TRUE,lwd=2,pal=colorRampPalette(c("black","blue")))##End(Not run)trin Performs trigonometric interpolationDescriptionThis function performs trigonometric interpolation for the passed basic state variable and the re-quested latitudeUsagetrin(y,yk,mercator=FALSE)Argumentsy Numeric.The latitude where the interpolation is requiredyk Numeric vector of the data to be interpolated.For instance,umz or betammercator Logical.Is it require to transform thefinal data in mercator coordinates?Default is FALSE.ValueNumeric valueNoteThis function is an alternative to ypos and is more accurateSee Alsoypos ray ray_sourceOther Interpolation:ypos()Examples{input<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betaks(u=input)umz<-rev(colMeans(b$u,na.rm=TRUE))*cos(rev(b$lat)*pi/180)betamz<-rev(colMeans(b$betam,na.rm=TRUE))16wave_arrival y0<--17trin(y=y0,yk=umz)}wave_arrival Filter the ray paths that arrives in an area of interestDescriptionwave_arrival ingests the ray paths tofilter by determined area of interest.Default CRS4326.Usagewave_arrival(x,aoi=NULL,xmin,xmax,ymin,ymax,ofile)Argumentsx sf data.frame object with the LINESTRINGS to befiltered.aoi String giving the path and thefilename of the area of interest.By default is NULL.If no aoi is not provided,the xmin,xmax,ymin,and ymax must beprovided.xmin Numeric.Indicates the western longitude to be used in the range-180to180.xmax Numeric.Indicates the eastern longitude to be used in the range-180to180.ymin Numeric.Indicates the southern longitude to be used in the range-90to90.ymax Numeric.Indicates the northern longitude to be used in the range-90to90.ofile Character;Outputfile name with.csv extension,for instance,"/user/aoi_ray.csv"Valuesf data.frameExamples{}ypos17 ypos Interpolation selecting the nearest neighborDescriptionThis function get the position in a vector of a given latitute y.Usageypos(y,lat,yk,mercator=FALSE)Argumentsy numeric value of one latitudelat numeric vector of latitudes from minor to majoryk numeric vector to be approximatedmercator Logical.Is it require to transform thefinal data in mercator coordinates?Default is FALSE.ValueThe position where the latitude y has the minor difference with latSee AlsoOther Interpolation:trin()Examples{input<-system.file("extdata","uwnd.mon.mean_200hPa_2014JFM.nc",package="raytracing")b<-betaks(u=input)ykk<-rev(colMeans(b$betam))ypos(y=-30,lat=seq(90,-90,-2.5),yk=ykk)}Index∗Interpolationtrin,15ypos,17∗datasetscoastlines,6betaks,2,9,10,13betam,4coastlines,6Ks,4,6,8Ktotal,4,7ray,2,4,9,15ray_path,12ray_source,2,4,10,13,15raytracing,11trin,10,14,15,17wave_arrival,16ypos,10,14,15,1718。
3GPP TS 36.331 V13.2.0 (2016-06)

3GPP TS 36.331 V13.2.0 (2016-06)Technical Specification3rd Generation Partnership Project;Technical Specification Group Radio Access Network;Evolved Universal Terrestrial Radio Access (E-UTRA);Radio Resource Control (RRC);Protocol specification(Release 13)The present document has been developed within the 3rd Generation Partnership Project (3GPP TM) and may be further elaborated for the purposes of 3GPP. The present document has not been subject to any approval process by the 3GPP Organizational Partners and shall not be implemented.This Specification is provided for future development work within 3GPP only. The Organizational Partners accept no liability for any use of this Specification. Specifications and reports for implementation of the 3GPP TM system should be obtained via the 3GPP Organizational Partners' Publications Offices.KeywordsUMTS, radio3GPPPostal address3GPP support office address650 Route des Lucioles - Sophia AntipolisValbonne - FRANCETel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16InternetCopyright NotificationNo part may be reproduced except as authorized by written permission.The copyright and the foregoing restriction extend to reproduction in all media.© 2016, 3GPP Organizational Partners (ARIB, ATIS, CCSA, ETSI, TSDSI, TTA, TTC).All rights reserved.UMTS™ is a Trade Mark of ETSI registered for the benefit of its members3GPP™ is a Trade Mark of ETSI registered for the benefit of its Members and of the 3GPP Organizational PartnersLTE™ is a Trade Mark of ETSI currently being registered for the benefit of its Members and of the 3GPP Organizational Partners GSM® and the GSM logo are registered and owned by the GSM AssociationBluetooth® is a Trade Mark of the Bluetooth SIG registered for the benefit of its membersContentsForeword (18)1Scope (19)2References (19)3Definitions, symbols and abbreviations (22)3.1Definitions (22)3.2Abbreviations (24)4General (27)4.1Introduction (27)4.2Architecture (28)4.2.1UE states and state transitions including inter RAT (28)4.2.2Signalling radio bearers (29)4.3Services (30)4.3.1Services provided to upper layers (30)4.3.2Services expected from lower layers (30)4.4Functions (30)5Procedures (32)5.1General (32)5.1.1Introduction (32)5.1.2General requirements (32)5.2System information (33)5.2.1Introduction (33)5.2.1.1General (33)5.2.1.2Scheduling (34)5.2.1.2a Scheduling for NB-IoT (34)5.2.1.3System information validity and notification of changes (35)5.2.1.4Indication of ETWS notification (36)5.2.1.5Indication of CMAS notification (37)5.2.1.6Notification of EAB parameters change (37)5.2.1.7Access Barring parameters change in NB-IoT (37)5.2.2System information acquisition (38)5.2.2.1General (38)5.2.2.2Initiation (38)5.2.2.3System information required by the UE (38)5.2.2.4System information acquisition by the UE (39)5.2.2.5Essential system information missing (42)5.2.2.6Actions upon reception of the MasterInformationBlock message (42)5.2.2.7Actions upon reception of the SystemInformationBlockType1 message (42)5.2.2.8Actions upon reception of SystemInformation messages (44)5.2.2.9Actions upon reception of SystemInformationBlockType2 (44)5.2.2.10Actions upon reception of SystemInformationBlockType3 (45)5.2.2.11Actions upon reception of SystemInformationBlockType4 (45)5.2.2.12Actions upon reception of SystemInformationBlockType5 (45)5.2.2.13Actions upon reception of SystemInformationBlockType6 (45)5.2.2.14Actions upon reception of SystemInformationBlockType7 (45)5.2.2.15Actions upon reception of SystemInformationBlockType8 (45)5.2.2.16Actions upon reception of SystemInformationBlockType9 (46)5.2.2.17Actions upon reception of SystemInformationBlockType10 (46)5.2.2.18Actions upon reception of SystemInformationBlockType11 (46)5.2.2.19Actions upon reception of SystemInformationBlockType12 (47)5.2.2.20Actions upon reception of SystemInformationBlockType13 (48)5.2.2.21Actions upon reception of SystemInformationBlockType14 (48)5.2.2.22Actions upon reception of SystemInformationBlockType15 (48)5.2.2.23Actions upon reception of SystemInformationBlockType16 (48)5.2.2.24Actions upon reception of SystemInformationBlockType17 (48)5.2.2.25Actions upon reception of SystemInformationBlockType18 (48)5.2.2.26Actions upon reception of SystemInformationBlockType19 (49)5.2.3Acquisition of an SI message (49)5.2.3a Acquisition of an SI message by BL UE or UE in CE or a NB-IoT UE (50)5.3Connection control (50)5.3.1Introduction (50)5.3.1.1RRC connection control (50)5.3.1.2Security (52)5.3.1.2a RN security (53)5.3.1.3Connected mode mobility (53)5.3.1.4Connection control in NB-IoT (54)5.3.2Paging (55)5.3.2.1General (55)5.3.2.2Initiation (55)5.3.2.3Reception of the Paging message by the UE (55)5.3.3RRC connection establishment (56)5.3.3.1General (56)5.3.3.1a Conditions for establishing RRC Connection for sidelink communication/ discovery (58)5.3.3.2Initiation (59)5.3.3.3Actions related to transmission of RRCConnectionRequest message (63)5.3.3.3a Actions related to transmission of RRCConnectionResumeRequest message (64)5.3.3.4Reception of the RRCConnectionSetup by the UE (64)5.3.3.4a Reception of the RRCConnectionResume by the UE (66)5.3.3.5Cell re-selection while T300, T302, T303, T305, T306, or T308 is running (68)5.3.3.6T300 expiry (68)5.3.3.7T302, T303, T305, T306, or T308 expiry or stop (69)5.3.3.8Reception of the RRCConnectionReject by the UE (70)5.3.3.9Abortion of RRC connection establishment (71)5.3.3.10Handling of SSAC related parameters (71)5.3.3.11Access barring check (72)5.3.3.12EAB check (73)5.3.3.13Access barring check for ACDC (73)5.3.3.14Access Barring check for NB-IoT (74)5.3.4Initial security activation (75)5.3.4.1General (75)5.3.4.2Initiation (76)5.3.4.3Reception of the SecurityModeCommand by the UE (76)5.3.5RRC connection reconfiguration (77)5.3.5.1General (77)5.3.5.2Initiation (77)5.3.5.3Reception of an RRCConnectionReconfiguration not including the mobilityControlInfo by theUE (77)5.3.5.4Reception of an RRCConnectionReconfiguration including the mobilityControlInfo by the UE(handover) (79)5.3.5.5Reconfiguration failure (83)5.3.5.6T304 expiry (handover failure) (83)5.3.5.7Void (84)5.3.5.7a T307 expiry (SCG change failure) (84)5.3.5.8Radio Configuration involving full configuration option (84)5.3.6Counter check (86)5.3.6.1General (86)5.3.6.2Initiation (86)5.3.6.3Reception of the CounterCheck message by the UE (86)5.3.7RRC connection re-establishment (87)5.3.7.1General (87)5.3.7.2Initiation (87)5.3.7.3Actions following cell selection while T311 is running (88)5.3.7.4Actions related to transmission of RRCConnectionReestablishmentRequest message (89)5.3.7.5Reception of the RRCConnectionReestablishment by the UE (89)5.3.7.6T311 expiry (91)5.3.7.7T301 expiry or selected cell no longer suitable (91)5.3.7.8Reception of RRCConnectionReestablishmentReject by the UE (91)5.3.8RRC connection release (92)5.3.8.1General (92)5.3.8.2Initiation (92)5.3.8.3Reception of the RRCConnectionRelease by the UE (92)5.3.8.4T320 expiry (93)5.3.9RRC connection release requested by upper layers (93)5.3.9.1General (93)5.3.9.2Initiation (93)5.3.10Radio resource configuration (93)5.3.10.0General (93)5.3.10.1SRB addition/ modification (94)5.3.10.2DRB release (95)5.3.10.3DRB addition/ modification (95)5.3.10.3a1DC specific DRB addition or reconfiguration (96)5.3.10.3a2LWA specific DRB addition or reconfiguration (98)5.3.10.3a3LWIP specific DRB addition or reconfiguration (98)5.3.10.3a SCell release (99)5.3.10.3b SCell addition/ modification (99)5.3.10.3c PSCell addition or modification (99)5.3.10.4MAC main reconfiguration (99)5.3.10.5Semi-persistent scheduling reconfiguration (100)5.3.10.6Physical channel reconfiguration (100)5.3.10.7Radio Link Failure Timers and Constants reconfiguration (101)5.3.10.8Time domain measurement resource restriction for serving cell (101)5.3.10.9Other configuration (102)5.3.10.10SCG reconfiguration (103)5.3.10.11SCG dedicated resource configuration (104)5.3.10.12Reconfiguration SCG or split DRB by drb-ToAddModList (105)5.3.10.13Neighbour cell information reconfiguration (105)5.3.10.14Void (105)5.3.10.15Sidelink dedicated configuration (105)5.3.10.16T370 expiry (106)5.3.11Radio link failure related actions (107)5.3.11.1Detection of physical layer problems in RRC_CONNECTED (107)5.3.11.2Recovery of physical layer problems (107)5.3.11.3Detection of radio link failure (107)5.3.12UE actions upon leaving RRC_CONNECTED (109)5.3.13UE actions upon PUCCH/ SRS release request (110)5.3.14Proximity indication (110)5.3.14.1General (110)5.3.14.2Initiation (111)5.3.14.3Actions related to transmission of ProximityIndication message (111)5.3.15Void (111)5.4Inter-RAT mobility (111)5.4.1Introduction (111)5.4.2Handover to E-UTRA (112)5.4.2.1General (112)5.4.2.2Initiation (112)5.4.2.3Reception of the RRCConnectionReconfiguration by the UE (112)5.4.2.4Reconfiguration failure (114)5.4.2.5T304 expiry (handover to E-UTRA failure) (114)5.4.3Mobility from E-UTRA (114)5.4.3.1General (114)5.4.3.2Initiation (115)5.4.3.3Reception of the MobilityFromEUTRACommand by the UE (115)5.4.3.4Successful completion of the mobility from E-UTRA (116)5.4.3.5Mobility from E-UTRA failure (117)5.4.4Handover from E-UTRA preparation request (CDMA2000) (117)5.4.4.1General (117)5.4.4.2Initiation (118)5.4.4.3Reception of the HandoverFromEUTRAPreparationRequest by the UE (118)5.4.5UL handover preparation transfer (CDMA2000) (118)5.4.5.1General (118)5.4.5.2Initiation (118)5.4.5.3Actions related to transmission of the ULHandoverPreparationTransfer message (119)5.4.5.4Failure to deliver the ULHandoverPreparationTransfer message (119)5.4.6Inter-RAT cell change order to E-UTRAN (119)5.4.6.1General (119)5.4.6.2Initiation (119)5.4.6.3UE fails to complete an inter-RAT cell change order (119)5.5Measurements (120)5.5.1Introduction (120)5.5.2Measurement configuration (121)5.5.2.1General (121)5.5.2.2Measurement identity removal (122)5.5.2.2a Measurement identity autonomous removal (122)5.5.2.3Measurement identity addition/ modification (123)5.5.2.4Measurement object removal (124)5.5.2.5Measurement object addition/ modification (124)5.5.2.6Reporting configuration removal (126)5.5.2.7Reporting configuration addition/ modification (127)5.5.2.8Quantity configuration (127)5.5.2.9Measurement gap configuration (127)5.5.2.10Discovery signals measurement timing configuration (128)5.5.2.11RSSI measurement timing configuration (128)5.5.3Performing measurements (128)5.5.3.1General (128)5.5.3.2Layer 3 filtering (131)5.5.4Measurement report triggering (131)5.5.4.1General (131)5.5.4.2Event A1 (Serving becomes better than threshold) (135)5.5.4.3Event A2 (Serving becomes worse than threshold) (136)5.5.4.4Event A3 (Neighbour becomes offset better than PCell/ PSCell) (136)5.5.4.5Event A4 (Neighbour becomes better than threshold) (137)5.5.4.6Event A5 (PCell/ PSCell becomes worse than threshold1 and neighbour becomes better thanthreshold2) (138)5.5.4.6a Event A6 (Neighbour becomes offset better than SCell) (139)5.5.4.7Event B1 (Inter RAT neighbour becomes better than threshold) (139)5.5.4.8Event B2 (PCell becomes worse than threshold1 and inter RAT neighbour becomes better thanthreshold2) (140)5.5.4.9Event C1 (CSI-RS resource becomes better than threshold) (141)5.5.4.10Event C2 (CSI-RS resource becomes offset better than reference CSI-RS resource) (141)5.5.4.11Event W1 (WLAN becomes better than a threshold) (142)5.5.4.12Event W2 (All WLAN inside WLAN mobility set becomes worse than threshold1 and a WLANoutside WLAN mobility set becomes better than threshold2) (142)5.5.4.13Event W3 (All WLAN inside WLAN mobility set becomes worse than a threshold) (143)5.5.5Measurement reporting (144)5.5.6Measurement related actions (148)5.5.6.1Actions upon handover and re-establishment (148)5.5.6.2Speed dependant scaling of measurement related parameters (149)5.5.7Inter-frequency RSTD measurement indication (149)5.5.7.1General (149)5.5.7.2Initiation (150)5.5.7.3Actions related to transmission of InterFreqRSTDMeasurementIndication message (150)5.6Other (150)5.6.0General (150)5.6.1DL information transfer (151)5.6.1.1General (151)5.6.1.2Initiation (151)5.6.1.3Reception of the DLInformationTransfer by the UE (151)5.6.2UL information transfer (151)5.6.2.1General (151)5.6.2.2Initiation (151)5.6.2.3Actions related to transmission of ULInformationTransfer message (152)5.6.2.4Failure to deliver ULInformationTransfer message (152)5.6.3UE capability transfer (152)5.6.3.1General (152)5.6.3.2Initiation (153)5.6.3.3Reception of the UECapabilityEnquiry by the UE (153)5.6.4CSFB to 1x Parameter transfer (157)5.6.4.1General (157)5.6.4.2Initiation (157)5.6.4.3Actions related to transmission of CSFBParametersRequestCDMA2000 message (157)5.6.4.4Reception of the CSFBParametersResponseCDMA2000 message (157)5.6.5UE Information (158)5.6.5.1General (158)5.6.5.2Initiation (158)5.6.5.3Reception of the UEInformationRequest message (158)5.6.6 Logged Measurement Configuration (159)5.6.6.1General (159)5.6.6.2Initiation (160)5.6.6.3Reception of the LoggedMeasurementConfiguration by the UE (160)5.6.6.4T330 expiry (160)5.6.7 Release of Logged Measurement Configuration (160)5.6.7.1General (160)5.6.7.2Initiation (160)5.6.8 Measurements logging (161)5.6.8.1General (161)5.6.8.2Initiation (161)5.6.9In-device coexistence indication (163)5.6.9.1General (163)5.6.9.2Initiation (164)5.6.9.3Actions related to transmission of InDeviceCoexIndication message (164)5.6.10UE Assistance Information (165)5.6.10.1General (165)5.6.10.2Initiation (166)5.6.10.3Actions related to transmission of UEAssistanceInformation message (166)5.6.11 Mobility history information (166)5.6.11.1General (166)5.6.11.2Initiation (166)5.6.12RAN-assisted WLAN interworking (167)5.6.12.1General (167)5.6.12.2Dedicated WLAN offload configuration (167)5.6.12.3WLAN offload RAN evaluation (167)5.6.12.4T350 expiry or stop (167)5.6.12.5Cell selection/ re-selection while T350 is running (168)5.6.13SCG failure information (168)5.6.13.1General (168)5.6.13.2Initiation (168)5.6.13.3Actions related to transmission of SCGFailureInformation message (168)5.6.14LTE-WLAN Aggregation (169)5.6.14.1Introduction (169)5.6.14.2Reception of LWA configuration (169)5.6.14.3Release of LWA configuration (170)5.6.15WLAN connection management (170)5.6.15.1Introduction (170)5.6.15.2WLAN connection status reporting (170)5.6.15.2.1General (170)5.6.15.2.2Initiation (171)5.6.15.2.3Actions related to transmission of WLANConnectionStatusReport message (171)5.6.15.3T351 Expiry (WLAN connection attempt timeout) (171)5.6.15.4WLAN status monitoring (171)5.6.16RAN controlled LTE-WLAN interworking (172)5.6.16.1General (172)5.6.16.2WLAN traffic steering command (172)5.6.17LTE-WLAN aggregation with IPsec tunnel (173)5.6.17.1General (173)5.7Generic error handling (174)5.7.1General (174)5.7.2ASN.1 violation or encoding error (174)5.7.3Field set to a not comprehended value (174)5.7.4Mandatory field missing (174)5.7.5Not comprehended field (176)5.8MBMS (176)5.8.1Introduction (176)5.8.1.1General (176)5.8.1.2Scheduling (176)5.8.1.3MCCH information validity and notification of changes (176)5.8.2MCCH information acquisition (178)5.8.2.1General (178)5.8.2.2Initiation (178)5.8.2.3MCCH information acquisition by the UE (178)5.8.2.4Actions upon reception of the MBSFNAreaConfiguration message (178)5.8.2.5Actions upon reception of the MBMSCountingRequest message (179)5.8.3MBMS PTM radio bearer configuration (179)5.8.3.1General (179)5.8.3.2Initiation (179)5.8.3.3MRB establishment (179)5.8.3.4MRB release (179)5.8.4MBMS Counting Procedure (179)5.8.4.1General (179)5.8.4.2Initiation (180)5.8.4.3Reception of the MBMSCountingRequest message by the UE (180)5.8.5MBMS interest indication (181)5.8.5.1General (181)5.8.5.2Initiation (181)5.8.5.3Determine MBMS frequencies of interest (182)5.8.5.4Actions related to transmission of MBMSInterestIndication message (183)5.8a SC-PTM (183)5.8a.1Introduction (183)5.8a.1.1General (183)5.8a.1.2SC-MCCH scheduling (183)5.8a.1.3SC-MCCH information validity and notification of changes (183)5.8a.1.4Procedures (184)5.8a.2SC-MCCH information acquisition (184)5.8a.2.1General (184)5.8a.2.2Initiation (184)5.8a.2.3SC-MCCH information acquisition by the UE (184)5.8a.2.4Actions upon reception of the SCPTMConfiguration message (185)5.8a.3SC-PTM radio bearer configuration (185)5.8a.3.1General (185)5.8a.3.2Initiation (185)5.8a.3.3SC-MRB establishment (185)5.8a.3.4SC-MRB release (185)5.9RN procedures (186)5.9.1RN reconfiguration (186)5.9.1.1General (186)5.9.1.2Initiation (186)5.9.1.3Reception of the RNReconfiguration by the RN (186)5.10Sidelink (186)5.10.1Introduction (186)5.10.1a Conditions for sidelink communication operation (187)5.10.2Sidelink UE information (188)5.10.2.1General (188)5.10.2.2Initiation (189)5.10.2.3Actions related to transmission of SidelinkUEInformation message (193)5.10.3Sidelink communication monitoring (195)5.10.6Sidelink discovery announcement (198)5.10.6a Sidelink discovery announcement pool selection (201)5.10.6b Sidelink discovery announcement reference carrier selection (201)5.10.7Sidelink synchronisation information transmission (202)5.10.7.1General (202)5.10.7.2Initiation (203)5.10.7.3Transmission of SLSS (204)5.10.7.4Transmission of MasterInformationBlock-SL message (205)5.10.7.5Void (206)5.10.8Sidelink synchronisation reference (206)5.10.8.1General (206)5.10.8.2Selection and reselection of synchronisation reference UE (SyncRef UE) (206)5.10.9Sidelink common control information (207)5.10.9.1General (207)5.10.9.2Actions related to reception of MasterInformationBlock-SL message (207)5.10.10Sidelink relay UE operation (207)5.10.10.1General (207)5.10.10.2AS-conditions for relay related sidelink communication transmission by sidelink relay UE (207)5.10.10.3AS-conditions for relay PS related sidelink discovery transmission by sidelink relay UE (208)5.10.10.4Sidelink relay UE threshold conditions (208)5.10.11Sidelink remote UE operation (208)5.10.11.1General (208)5.10.11.2AS-conditions for relay related sidelink communication transmission by sidelink remote UE (208)5.10.11.3AS-conditions for relay PS related sidelink discovery transmission by sidelink remote UE (209)5.10.11.4Selection and reselection of sidelink relay UE (209)5.10.11.5Sidelink remote UE threshold conditions (210)6Protocol data units, formats and parameters (tabular & ASN.1) (210)6.1General (210)6.2RRC messages (212)6.2.1General message structure (212)–EUTRA-RRC-Definitions (212)–BCCH-BCH-Message (212)–BCCH-DL-SCH-Message (212)–BCCH-DL-SCH-Message-BR (213)–MCCH-Message (213)–PCCH-Message (213)–DL-CCCH-Message (214)–DL-DCCH-Message (214)–UL-CCCH-Message (214)–UL-DCCH-Message (215)–SC-MCCH-Message (215)6.2.2Message definitions (216)–CounterCheck (216)–CounterCheckResponse (217)–CSFBParametersRequestCDMA2000 (217)–CSFBParametersResponseCDMA2000 (218)–DLInformationTransfer (218)–HandoverFromEUTRAPreparationRequest (CDMA2000) (219)–InDeviceCoexIndication (220)–InterFreqRSTDMeasurementIndication (222)–LoggedMeasurementConfiguration (223)–MasterInformationBlock (225)–MBMSCountingRequest (226)–MBMSCountingResponse (226)–MBMSInterestIndication (227)–MBSFNAreaConfiguration (228)–MeasurementReport (228)–MobilityFromEUTRACommand (229)–Paging (232)–ProximityIndication (233)–RNReconfiguration (234)–RNReconfigurationComplete (234)–RRCConnectionReconfiguration (235)–RRCConnectionReconfigurationComplete (240)–RRCConnectionReestablishment (241)–RRCConnectionReestablishmentComplete (241)–RRCConnectionReestablishmentReject (242)–RRCConnectionReestablishmentRequest (243)–RRCConnectionReject (243)–RRCConnectionRelease (244)–RRCConnectionResume (248)–RRCConnectionResumeComplete (249)–RRCConnectionResumeRequest (250)–RRCConnectionRequest (250)–RRCConnectionSetup (251)–RRCConnectionSetupComplete (252)–SCGFailureInformation (253)–SCPTMConfiguration (254)–SecurityModeCommand (255)–SecurityModeComplete (255)–SecurityModeFailure (256)–SidelinkUEInformation (256)–SystemInformation (258)–SystemInformationBlockType1 (259)–UEAssistanceInformation (264)–UECapabilityEnquiry (265)–UECapabilityInformation (266)–UEInformationRequest (267)–UEInformationResponse (267)–ULHandoverPreparationTransfer (CDMA2000) (273)–ULInformationTransfer (274)–WLANConnectionStatusReport (274)6.3RRC information elements (275)6.3.1System information blocks (275)–SystemInformationBlockType2 (275)–SystemInformationBlockType3 (279)–SystemInformationBlockType4 (282)–SystemInformationBlockType5 (283)–SystemInformationBlockType6 (287)–SystemInformationBlockType7 (289)–SystemInformationBlockType8 (290)–SystemInformationBlockType9 (295)–SystemInformationBlockType10 (295)–SystemInformationBlockType11 (296)–SystemInformationBlockType12 (297)–SystemInformationBlockType13 (297)–SystemInformationBlockType14 (298)–SystemInformationBlockType15 (298)–SystemInformationBlockType16 (299)–SystemInformationBlockType17 (300)–SystemInformationBlockType18 (301)–SystemInformationBlockType19 (301)–SystemInformationBlockType20 (304)6.3.2Radio resource control information elements (304)–AntennaInfo (304)–AntennaInfoUL (306)–CQI-ReportConfig (307)–CQI-ReportPeriodicProcExtId (314)–CrossCarrierSchedulingConfig (314)–CSI-IM-Config (315)–CSI-IM-ConfigId (315)–CSI-RS-Config (317)–CSI-RS-ConfigEMIMO (318)–CSI-RS-ConfigNZP (319)–CSI-RS-ConfigNZPId (320)–CSI-RS-ConfigZP (321)–CSI-RS-ConfigZPId (321)–DMRS-Config (321)–DRB-Identity (322)–EPDCCH-Config (322)–EIMTA-MainConfig (324)–LogicalChannelConfig (325)–LWA-Configuration (326)–LWIP-Configuration (326)–RCLWI-Configuration (327)–MAC-MainConfig (327)–P-C-AndCBSR (332)–PDCCH-ConfigSCell (333)–PDCP-Config (334)–PDSCH-Config (337)–PDSCH-RE-MappingQCL-ConfigId (339)–PHICH-Config (339)–PhysicalConfigDedicated (339)–P-Max (344)–PRACH-Config (344)–PresenceAntennaPort1 (346)–PUCCH-Config (347)–PUSCH-Config (351)–RACH-ConfigCommon (355)–RACH-ConfigDedicated (357)–RadioResourceConfigCommon (358)–RadioResourceConfigDedicated (362)–RLC-Config (367)–RLF-TimersAndConstants (369)–RN-SubframeConfig (370)–SchedulingRequestConfig (371)–SoundingRS-UL-Config (372)–SPS-Config (375)–TDD-Config (376)–TimeAlignmentTimer (377)–TPC-PDCCH-Config (377)–TunnelConfigLWIP (378)–UplinkPowerControl (379)–WLAN-Id-List (382)–WLAN-MobilityConfig (382)6.3.3Security control information elements (382)–NextHopChainingCount (382)–SecurityAlgorithmConfig (383)–ShortMAC-I (383)6.3.4Mobility control information elements (383)–AdditionalSpectrumEmission (383)–ARFCN-ValueCDMA2000 (383)–ARFCN-ValueEUTRA (384)–ARFCN-ValueGERAN (384)–ARFCN-ValueUTRA (384)–BandclassCDMA2000 (384)–BandIndicatorGERAN (385)–CarrierFreqCDMA2000 (385)–CarrierFreqGERAN (385)–CellIndexList (387)–CellReselectionPriority (387)–CellSelectionInfoCE (387)–CellReselectionSubPriority (388)–CSFB-RegistrationParam1XRTT (388)–CellGlobalIdEUTRA (389)–CellGlobalIdUTRA (389)–CellGlobalIdGERAN (390)–CellGlobalIdCDMA2000 (390)–CellSelectionInfoNFreq (391)–CSG-Identity (391)–FreqBandIndicator (391)–MobilityControlInfo (391)–MobilityParametersCDMA2000 (1xRTT) (393)–MobilityStateParameters (394)–MultiBandInfoList (394)–NS-PmaxList (394)–PhysCellId (395)–PhysCellIdRange (395)–PhysCellIdRangeUTRA-FDDList (395)–PhysCellIdCDMA2000 (396)–PhysCellIdGERAN (396)–PhysCellIdUTRA-FDD (396)–PhysCellIdUTRA-TDD (396)–PLMN-Identity (397)–PLMN-IdentityList3 (397)–PreRegistrationInfoHRPD (397)–Q-QualMin (398)–Q-RxLevMin (398)–Q-OffsetRange (398)–Q-OffsetRangeInterRAT (399)–ReselectionThreshold (399)–ReselectionThresholdQ (399)–SCellIndex (399)–ServCellIndex (400)–SpeedStateScaleFactors (400)–SystemInfoListGERAN (400)–SystemTimeInfoCDMA2000 (401)–TrackingAreaCode (401)–T-Reselection (402)–T-ReselectionEUTRA-CE (402)6.3.5Measurement information elements (402)–AllowedMeasBandwidth (402)–CSI-RSRP-Range (402)–Hysteresis (402)–LocationInfo (403)–MBSFN-RSRQ-Range (403)–MeasConfig (404)–MeasDS-Config (405)–MeasGapConfig (406)–MeasId (407)–MeasIdToAddModList (407)–MeasObjectCDMA2000 (408)–MeasObjectEUTRA (408)–MeasObjectGERAN (412)–MeasObjectId (412)–MeasObjectToAddModList (412)–MeasObjectUTRA (413)–ReportConfigEUTRA (422)–ReportConfigId (425)–ReportConfigInterRAT (425)–ReportConfigToAddModList (428)–ReportInterval (429)–RSRP-Range (429)–RSRQ-Range (430)–RSRQ-Type (430)–RS-SINR-Range (430)–RSSI-Range-r13 (431)–TimeToTrigger (431)–UL-DelayConfig (431)–WLAN-CarrierInfo (431)–WLAN-RSSI-Range (432)–WLAN-Status (432)6.3.6Other information elements (433)–AbsoluteTimeInfo (433)–AreaConfiguration (433)–C-RNTI (433)–DedicatedInfoCDMA2000 (434)–DedicatedInfoNAS (434)–FilterCoefficient (434)–LoggingDuration (434)–LoggingInterval (435)–MeasSubframePattern (435)–MMEC (435)–NeighCellConfig (435)–OtherConfig (436)–RAND-CDMA2000 (1xRTT) (437)–RAT-Type (437)–ResumeIdentity (437)–RRC-TransactionIdentifier (438)–S-TMSI (438)–TraceReference (438)–UE-CapabilityRAT-ContainerList (438)–UE-EUTRA-Capability (439)–UE-RadioPagingInfo (469)–UE-TimersAndConstants (469)–VisitedCellInfoList (470)–WLAN-OffloadConfig (470)6.3.7MBMS information elements (472)–MBMS-NotificationConfig (472)–MBMS-ServiceList (473)–MBSFN-AreaId (473)–MBSFN-AreaInfoList (473)–MBSFN-SubframeConfig (474)–PMCH-InfoList (475)6.3.7a SC-PTM information elements (476)–SC-MTCH-InfoList (476)–SCPTM-NeighbourCellList (478)6.3.8Sidelink information elements (478)–SL-CommConfig (478)–SL-CommResourcePool (479)–SL-CP-Len (480)–SL-DiscConfig (481)–SL-DiscResourcePool (483)–SL-DiscTxPowerInfo (485)–SL-GapConfig (485)。
WDM设备常见告警

单板无软件
1.1.1.6
告警名称
告警意义
BD_STATUS
单板不在为告警
PORTSWITCH_FAIL
光开关倒换失败
PS
已发生保护倒换指示
NO_BD_SOFT
单板无软件
MUT_LOS
合路信号丢失
TEMP_ALARM
温度告警,一般过过高
POWER_DIFF_DEFECT
主备监测信号光功率差异劣化
MS_AIS
复用段告警指示
MS_RDI
复用段远端缺陷指示
MS_REI
复用段远端误码指示
1.1.1.2
告警名称
告警意义
MUT_LOS
合路信号丢失,表示合路信号输入无光
BD_STATUS
单板不在为告警
NO_BD_SOFT
单板无软件
TEMP_ALARM
温度告警告警,一般为过高
POWER_FAIL
单板电源故障
POWER_DIFF_OVER
主备监测信号光功率差异越限
1.1.1.7
告警名称
告警意义
BD_STATUS
单板不在为告警
NESF_LOST
主机软件丢失
NESTAT_INSTALL
网元处于安装态
FAN_FAIL
风扇故障
OPS_PS_FAIL
光通道保护倒换失败
OPS_PS_INDI
光通道保护倒换指示
TEMP_ALARM
接收线路侧信号光功率过强
OUT_PWR_LOW
输出线路侧信号光功率过弱
OUT_PWR_HIGH
输出线路侧信号光功率过强
1.1.1.5
告警名称
Alcatel传输告警

(LOS)信号丢失Loss of signal 检测不到对端信号,需要检查线路(TF)传送信号Transmitter Signal 发信号失败,需要替换设备盘(TD)传输裂化Transmitter degraded 发送信号劣化,需要替换设备盘(LOF)帧丢失Loss of frame 丢失帧,需要检查线路AIS 远端设备无输入信号,需要检查远端设备连接(EBER)过载Excessive BER 误码率过高,需要检查线路(DS)信号裂化Degraded Signal 误码率过高,需要检查线路(LOP)指针丢失Loss of Pointer 丢失指针,需要检查线路(SLM)Signal label Mismatch 信号标签不匹配,需要检查设备配置(FERF or RDI)远端接受失效Far End Received Failure 需要检查远端设备(SSF)Server Signal Failure 服务信号丢失:指示通道没有有效信号输入注:如果为同步告警,则指示没有所需时钟源(DRIFT)频偏Frequency offset 时钟漂移,需要检查时钟设置(LOSS)时钟源丢失Loss of timing source 需要检查时钟源的状态Resource Isolation 网管或1320 CT无法联系网元,需要检查网管通道是否畅通,常伴随CSF 告警出现(CSF)通讯子系统告警Communication Subsystem Isolation 检查(LAPD)Unequipped(U)Referred to Signal Label 配置错误,一般为两侧设备负荷配置不匹配(UEP)存在未配置设备Unconfigured Equipment Present 设备盘插入槽位却没有配置(ICP)内部通讯告警Internal Communication Problem 一般不用理会,可能导致RUP告警(URU)无法获得底层资源Underling Resource Unavailable 存在硬件问题,要更换硬件(PM_AS)性能监测告警合成Performance Monitoring alarm synthesis 性能检测告警(CPE)通讯协议错误Communication protocol Error 检查MSP协议是否正常(AUXP)检查远端设备(RNTE)远端结点传输错误检查远端设备(LOMF)多帧丢失Loss of multiframe 检查负荷配置是否正确(PTM)Path Trace Mismatch 通道跟踪失败(RUM)单元盘丢失missing 设备盘是否插入该槽位(RUP)单元盘故障Unit Problem 需要更换硬件(RUTM)设备盘类型不匹配Unit type mismatch 检查设备盘类型(VM)软件版本不匹配V ersion mismatch 需要download新版软件(POP)Power Problem 电源问题,需要替换设备盘(BF)电源告警检查主用盒备用电源(FF)熔丝告警更换CONGI的熔丝(LAN)LAN problem 网关网元的以太口不正常,检查以太连接是否正常Card not responding(CRN)Internal communication problem 设备盘不响应(OORLC)Out OF Range Laser Output 超出激光器输出范围,需要替换光盘(HLT)High Laser Temperature 激光器温度过高。
NVIDIA OptiX 2.5.1 光线追踪引擎与SDK说明书

Release Notes for theNVIDIA® OptiX™ ray tracing engineVersion 2.5.1 May 2012Welcome to the latest release of the NVIDIA OptiX ray tracing engine and SDK, with support for all CUDA-capable GPUs. This package contains the libraries required to experience the latest technology for programmable GPU ray tracing, plus pre-compiled samples (with source code) demonstrating a broad range of ray tracing techniques and highlighting basic functionality.Support:Please post comments or support questions on the new NVIDIA developer forum that can be found here:/devforum/categories/tagged/optix&catid=151 (use the optix tag for all OptiX related posts). Questions that require confidentiality can be e-mailed to ********************* and someone on the development team will respond. The OptiX download page is/optix.System Requirements (for running binaries referencing OptiX) Graphics Hardware:∙CUDA capable devices (G80 or later) are supported on GeForce, Quadro, or Tesla class products.Multiple devices/GPUs are onl y supported on “GT200” or “Fermi” class GPUs. Out-of-core raytracing of large datasets is only supported on Quadro and Tesla GPUs.Graphics Driver:∙The CUDA R275 or later driver is required. The latest drivers available are highly recommended (285.86 or later for Windows, 290.10 for Linux and the CUDA 4.0 driver extension for Mac). Forthe Mac, the driver extension module supplied with CUDA 4.0 or later will need to be installed.Driver versions beginning with 285.53 include very large speedup to OptiX compile times.∙Windows Vista and 7 use the Windows Display Driver Model (WDDM). This driver is suboptimal for GPU computation, so Nvidia has introduced the Tesla Compute Cluster (TCC) driver. Bydefault, Tesla products use the TCC driver, which does not support OpenGL or D3D, and does notsupport interoperating with WDDM cards in CUDA and OptiX. An OptiX context must use onlyWDDM devices or only TCC devices. This situation should be resolved later this year. In themeantime, placing your Tesla hardware into WDDM mode will allow it to work in a multi-GPUconfiguration with other WDDM devices such as Quadro brand parts.Operating System:∙Windows XP/Vista/7 32-bit or 64-bit; Linux RHEL 4.8 - 64-bit only, Ubuntu 10.10 - 64-bit; OSX10.6+ (universal binary with 32 and 64-bit x86).Development Environment Requirements (for compiling with OptiX) All Platforms (Windows, Linux, Mac OSX):∙CUDA Toolkit 2.3, 3.0, 3.1, 3.2, 4.0, 4.1, 4.2.OptiX 2.5 has been built with CUDA 4.0, but any specified toolkit should work when compiling PTX forOptiX. If an application links against both the OptiX library and the CUDA runtime on Mac and Linux, it is recommended to use CUDA 4.0. CUDA 4.1 and 4.2 are now supported. CUDA 4.1 and 4.2 code oftencontains a moderate performance penalty due to loads and stores not being vectorized anymore. Forthis reason CUDA 4.0 is generally preferred.∙C/C++ CompilerVisual Studio 2005, 2008 or 2010 is required on Windows systems. gcc 4.2 and 4.3 have been tested onLinux. The 3.2 Xcode development tools have been tested on Mac OSX 10.6.∙GLUTMost OptiX samples use the GLUT toolkit. Freeglut ships with the Windows OptiX distribution. GLUT isinstalled by default on Mac OSX. A GLUT installation is required to build samples on Linux.Fixes since OptiX 2.5.0 final release:∙CUDA 4.2 support.∙Linux distribution is now universal across 64-bit Linux distributions.∙Fixed slowdown with Lbvh builder in multi-GPU configurations.∙Optimized replacing a buffer with another of the same size, for faster stereo rendering∙Reduced overhead of kernel launches and recompiles when API state changes have occurred.∙Fixed texture unit assignment bug.∙Fixed optixpp issue where object->destroy() failed and checkError called object->getContext().∙Fixed bug in zoneplate sample.∙Fixed bug with BVH refit.∙Fixed matrix variable changes not being propagated to device.∙Fixed accesses to private variable in matrix class.∙Fixed CPUTraversal memory leak.∙Fix 32-bit kernel / 64-bit application paging problems.Fixes since OptiX 2.5.0 RC 3:∙User PTX code compiled for SM 2.0 using CUDA 4.1 now works correctly.∙Minor optimizations.∙Fixed bug with texture unit numbers.∙Fixed bug with transform node with null child.∙Fixed bug with BVHs that have no children.∙Fixed a debug assert with Lbvh and MedianBvh.Fixes since OptiX 2.5.0 RC 2:∙The environment v ariable “OPTIX_API_CAPTURE” may now be used in release builds to createa dump of all API calls. This is useful for sending bug reproducers to the OptiX developmentteam, and for diagnosing application behavior.∙Better load balancing across GPUs with diffe rent number of SM’s, for example a Quadro 2000 and a Tesla C2075.∙Multiple GPUs of differing minor SM version, such as SM 2.0 and SM 2.1, may now work together.∙Decreased host memory footprint during acceleration structure builds.∙Fixed serialization for “Lbvh” builder.∙Fixed ‘h’ key in Whirligig sample.∙Fixed bug with paging where some threads would execute some instructions multiple times on a page fault.∙Fixed bug with acceleration structure builds.Fixes since OptiX 2.5.0 RC 1:∙“-m” flag and “m” key in many samples now display whether paging is happening or not.∙Out of memory error bug fix. This bug happened while paging if a buffer was selected to be non-paged but still couldn't be allocated.∙Customer bug fix in OptiX compiler when exceptions and paging were turned on together.∙Customer bug fix regarding TextureSamplers.∙Fix for multiple rtIntersectChild calls in a loop.∙Fixed mcmc_sampler sample.Enhancements from OptiX 2.1.1:∙Out-of-Core Memory Paging– scene sizes can now exceed the amount of physical memory on professional GPUs (Quadro or Tesla) to the extent there is host RAM available. This support is automatic, but can be overridden. The resulting performance will vary according to the amount the scene is paging –which is a combination of how much is exceeding GPU memory, how much of the scene is visible to thecamera, and the extent of secondary rays in use. Some of the related changes include:o New BVH traverser –“BvhCompact” can compress data by up to a factor of four.o Added rtuCreateClusteredMesh() and rtuCreateClusteredMeshExt() for laying out data in a paging friendly manner.o Whether or not paging has been enabled can be queried with the rtContextGetAttribute() API call and specifying RT_CONTEXT_ATTRIBUTE_GPU_PAGING_ACTIVE.o Paging support can be disabled by calling the rtContextSetAttribute() API function with RT_CONTEXT_ATTRIBUTE_GPU_PAGING_FORCED_OFF.∙Unlimited Textures– when not using graphics interop textures, the first 127 textures will continue to take advantage of Texture Units, while any additional texture is now automatically stored in Global Memory ata minor performance cost.∙GPU BVH Builder– the original Lbvh builder has been replaced with the HLBVH2 algorithm to deliver far faster acceleration structure building than is possible via the CPU. The resulting traversal performance is comparable to CPU builders.∙Further optimizations for Fermi GPUs.∙Improved run time when using 64-bit PTX.∙Visual Studio 2010 support.∙Added RT_TIMEOUT_CALLBACK and rtContextSetTimeoutCallback(). OptiX can now periodically call a user provided function. This function can instruct OptiX to stop and return control to the caller withoutfinishing the call. See programming guide for more information.∙Added new RTcontext attributes that can be queried or set.o RT_CONTEXT_ATTRIBUTE_CPU_NUM_THREADS – for specifying the number of CPU threads OptiX can use for various tasks such as parallel CPU acceleration structure builds.o RT_CONTEXT_ATTRIBUTE_USED_HOST_MEMORY – Get the amount of host memory OptiX is consuming be tween API calls (note that this isn’t a high water mark).o RT_CONTEXT_ATTRIBUTE_GPU_PAGING_ACTIVE – Indicates if paging has been enabled. Once paging has been enabled it cannot be forced off.o RT_CONTEXT_ATTRIBUTE_GPU_PAGING_FORCED_OFF – Force paging to be off regardless of whether OptiX attempts to enable it.Enhancements from OptiX 2.1.1 (continued):∙Errors are now generated during compilation when calling an OptiX function in an illegal location (see table in Programming guide).∙Reduction in compile times for scenes with multiple ray types and programs only used by a single ray type.∙Added ability to throw an exception when rtIntersectChild() and rtReportIntersection() are called with an invalid index.∙Added rtContextSetAttribute().∙Added rtDeviceGetD3D9Device(), rtDeviceGetD3D10Device(), and rtDeviceGetD3D11Device().These functions return the OptiX device ordinal that corresponds to the given D3D device.∙Added support for VS2010 in RTU's rtuCUDACompileString() and rtuCUDACompileFile().∙For GCC targets, symbol exports are now controlled using visibility attributes. Thus, OptiX now only exports the same set of symbols that the windows version exports.∙Updates to optixu headerso Added Matrix3x3 make_matrix3x3(Matrix4x4) function.o Fixed variable liveness issues with optix::intersect_triangle() and optix::refract().o Added luminanceCIE(float3).o Added operator== and operator!= for (uint3,uint3).o Added ContextObj::getDeviceName(), ContextObj::getDeviceAttribute() andContextObj::getUsedHostMemory().o Added ContextObj::getCPUNumThreads(), ContextObj::getGPUPagingActive(),ContextObj::getGPUPagingForcedOff(), ContextObj::setCPUNumThreads() andContextObj::setGPUPagingForcedOff() to match new context properties.o OptixPP's destroy methods now set the underlying pointer to zero, so the container can be queried to determine if it is still valid.∙Samples and sample infrastructureo Added new sample that illustrates a method of doing displacement surfaces without having to pretessellate the surface. All tessellation happens during intersection.o Added sample_phong_lobe(), get_phong_lobe_pdf() and tonemap() to samples/cuda/helpers.h.o Refactored much of the code that made use of meshes in the samples into a MeshScene class.o The path_tracer sample now comes with a multiple importance sampling mode. Use the -mis flag to try it.∙CMakeo Look in paths that are installed by CUDA 4.0.o Added support for files with the same basename but different paths in the same target.o Working directory is now a subdirectory of CMakeFiles instead of the current binary directory.o Support for CUDA Toolkit installed in UNC paths.o Better support for flags and paths with spaces and quotes.Known limitations with version 2.5.0:∙Out-of-core dataset paging does not presently work with GeForce cards.∙The Lbvh builder has been completely replaced with the HLBVH2 algorithm. Note that specifying Lbvh as the builder in a 64-bit host application while using 32-bit PTX will cause the MedianBvh builder to beutilized. The internal format for Acceleration Structure data has changed. Previous cached data will not be usable with 2.5 and must be regenerated.∙Support for building host-based acceleration structures in parallel has been disabled on Linux in this version of OptiX.∙OptiX currently does not support running with NVIDIA Parallel Nsight. In addition, it is not recommended to compile PTX code using any -g (debug) flags to nvcc.∙Use of OpenGL and DirectX interop causes OptiX to crash when SLI is enabled. As noted below, SLI is not required to achieve scaling across multiple GPUs.∙All GPUs used by OptiX must be of the same MAJOR compute capability, such as compute capability 1.x or2.x. OptiX will automatically select the set of GPUs of the highest major compute capability and only usethose. For example, in a system with a GeForce GTX 460 (compute 2.1) and a GeForce GTX 480 (compute2.0), both will be used, but in a system with a Quadro 5800 (compute 1.3) and a Quadro 6000 (compute2.0) only the compute 2.0 device would only be selected. Applications may explicitly choose which GPUsto run, as is done in the progressive photon mapper sample, ppm.cpp, at the start of initScene(), but if the application requests a set of devices of different major compute capability an error will be returned.∙Texture arrays and MIP maps are not yet implemented.∙malloc(), free(), and printf() do not work in device code.∙Applications that use RT_BUFFER_INPUT_OUTPUT or RT_BUFFER_OUTPUT buffers on multi-GPU contexts must take care to ensure that the stride of memory accesses to that buffer is compatible with the PCIebus payload size. Using a buffer of type RT_FORMAT_FLOAT3, for example, will cause a massiveslowdown; use RT_FORMAT_FLOAT4 instead. Likewise, a group of parallel threads should present acontiguous span of 64 bytes for writing at once on an Intel chipset to avoid massive slowdowns, or 16bytes on NVIDIA chipsets to avoid moderate slowdowns.∙Linux only: due to a bug in GLUT on many Linux distributions, the SDK samples will not restore the original window size correctly after returning from full-screen mode. A newer version of freeglut may avoid thislimitation.∙The CUDA release notes recommend the use of -malign-double with GCC. However, on Mac OSX systems(10.5 with GCC 4.0.1 and 4.2.1 and 10.6 with GCC 4.2.1) this flag can produce miscompiles withstd::stream based classes in host code when compiling to 32 bits. If the structs are different sizes between device and host code, consider manually padding the structure rather than using this compiler flag.Performance Notes:∙OptiX performance tracks very closely to a GPU's CUDA core count and core clock speed for a given GPU generation.∙OptiX takes advantage of multiple GPUs without using SLI. It is not recommended to configure GPUs in SLI mode for OptiX applications. Multi-GPU scalability will vary with the workload being done, with longerand complex rendering (e.g., path tracing) scaling quite well with fast and simple rendering (e.g. Whitted or Cook) scaling much less.∙Mixing board types will reduce the memory size available to OptiX to that of the smallest GPU.∙Performance will be better when the entire scene fits within a single GPU’s memory. Adding additional GPUs increases performance, but does not increase the available memory beyond that of the smallestboard. If paging is disabled (see above), the entire scene must fit on the GPU.∙For compute-intensive rendering, performance is currently fairly linear in the number of pixels displayed/rendered. Reducing resolution can make development on entry level boards or laptops more practical.∙Performance on Windows Vista and 7 may be somewhat slower than Windows XP due to the architecture of the Windows Display Driver Model (WDDM).∙Uninitialized variables can increase register pressure and negatively impact performance.∙Pass arguments by reference instead of value whenever possible when calling local functions for optimal performance.Other Notes:∙CMake 2.8.6 (at least 2.6.3; 2.8.6 is the current version and also works.)/cmake/resources/software.htmlThe executable installer /files/v2.8/cmake-2.8.6-win32-x86.exe is recommended for Windows systems.。
排除光流错误跟踪点的鲁棒方法

排 除光流 错误 跟踪 点 的鲁棒 方法
杨明浩, 陶建华, 军涛, 叶 王阳生
( 国科 学 院 自动 化 研 究 所模 式 识 别 国家 重 点 实验 室 中
( n h o ya g npr a a . n mig a . n @ l .i. c c )
北京
109) 0 10 跟 踪光 照变 化 和 部 分 遮 挡 情 况 下 的 物 体 容 易产 生 漂 移 的 问题 , 针 通过 比较 跟 踪 点 与 该 点 补 集
态 矩 阵 在 时 间 序 列 上 的分 布 . 对视 频 序列 的抖 动 情 况 , 传 统 方 法 进 行 比较 的 实 验 结 果 表 明 , 方 法 对 于 排 除 错 针 与 该
误 跟 踪 点是 鲁棒 的.
关 键 词 : 流 法 ; 应 矩 阵 ; 机 抽样 一致 性 光 单 随
中 图 法 分 类 号 : P 9 . T 3 19
映 射 关 系 产 生 的投 影 点 之 间的 距 离 , 出 了一 种 光 流 错 误 跟 踪 点 排 除方 法一 一 异 类 距 法 . 先 证 明 了异 类 距 排 除 误 提 首 差 最 大元 素 的正 确 性 ; 后 在 静止 场 景 受 光 照 变 化 和 部 分 遮 挡 情 况 下 , 出 了 异 类 距 排 除错 误 跟 踪 点 以及 摄 像 机 姿 然 给
Ro u tOul rR j cin F o Op ia F o r c ig P i t bs t e ee t r m t l lw T a k n on s i o c
CP45错误信息中英文对照表
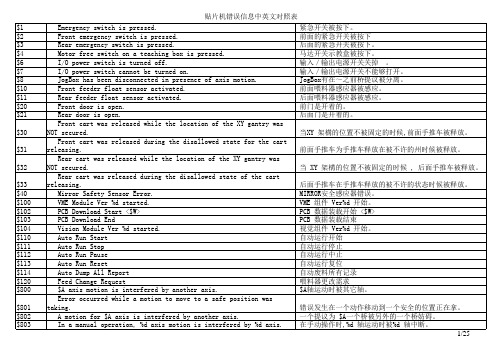
5G波束失败是这样恢复的
在5G(NR)网络中如果检测到预定义数量的波束故障,则通过随机接入信道(PRACH)使用候选波束触发波束故障的恢复流程。
触发该过程预定义波束故障数量由RRC消息中的BeamFailureInstanceMaxCount定义。
欢迎参阅: 5G中如何判断波束失败?5G(NR)网络中波束失败恢复分为四步:波束失败检测;最佳波束选择(SSB或CSI-RS);波束失败恢复请求;波束故障恢复响应。
一、波束失败恢复终端(UE)通过RRC消息“Beam Failure Recovery Config”为终端提供一组用于恢复的资源。
Beam Recovey通过在Beam failure recovery过程中选择在最佳候选波束上执行接入(RACH)来进行。
二、波束恢复RRC参数网络通过“BeamFailureRecoveryConfig”为终端下发波束恢复的参数配置。
图1.波束恢复参数配置图2.波束恢复随机接入参数配置三、两种波束恢复终端(UE)可为波束故障恢复请求执行以下两种接入(RACH)流程: CFRA RACH–非竞争随机接入CBRA RACH-基于竞争随机接入3.1 基于竞争波束恢复(CBRA for Beam Failure Recovery)基于:如终端(UE)没有配置CFRA RACH资源;如终端(UE)已经配置CFRA RACH,但由于候选波束不可用而无法执行非竞争随机接入(CFRA RACH);如果非竞争随机接入(CFRA RACH)不成功,则终端(UE)必须回退到基于竞争的随机接入(CBRA RACH)。
因此,当终端(UE)为恢复过程执行CBRA RACH时,它将作为基于正常竞争接入(RACH)过程来执行。
图3.基于竞争波束恢复流程UE处于RRC连接模式;UE在PHY层检测Beam Failure;UE为恢复过程执行候选波束选择;UE触发RACH过程并向gNB发送RACH前导;gNB在RAR窗口内为msg3发送随机访问响应RAR和UL授权;UE发送MAC CE(msg3)用于竞争解决;gNB向UE发送UL授权;波束故障恢复完成。
allegro错误代码

Line to Shape Spacing
走线与Shape太近
LW
Min Line Width
走线的宽度太细
Min Neck Width
走线变细的宽度太细
MA
Soldermask Alignment Error Pad
Soldermask Tolerance太小
MC
Pin/Via Soldermask to Symbol Soldermask
Route keepout to Bondpad
Bondpad在keepout之内
Via Keepout to Bondpad
Bondpad在Via Keepout之内
KC
Package to Place Keepin Spacing
元件在Place Keepin之外
Package to Place Keepout Spacing
Bondpad之间的错误
BL
Bondpad to Line
Bondpad与Line之间的错误
BS
Bondpad to Shape
Bondpad与Shape之间的错误
CC
Package to Package
Package之间的Spacing错误
Symbol Soldermask to Symbol
Soldermask零件防焊层之间的Spacing错误
BB Via与Test Via太近
BB Via to Through Via Spacing
BB Via与Through Via太近
Test Via to Test Via Spacing
Test Via之间太近
Test Via to Through Via Spacing
traceboundary 误差

一、traceboundary 误差的定义在计算机图像处理和计算几何学中,traceboundary 是一种用来追踪对象轮廓的算法。
然而,在实际应用中,由于图像质量、算法设计等方面的影响,traceboundary 算法在轮廓追踪过程中会产生误差。
二、traceboundary 误差的原因1. 图像质量问题在图像采集和传输过程中,可能会受到噪声、失真等因素的影响,导致图像质量下降,进而影响 traceboundary 的准确性。
2. 算法设计问题一些 traceboundary 算法在设计过程中可能存在不足,比如对于边界像素的判断条件不够严格,或者在像素连接过程中没有考虑到特殊情况,都可能导致轮廓追踪的误差。
3. 参数设置不当在应用 traceboundary 算法时,参数的选择对于最终的轮廓结果影响很大。
如果参数设置不当,比如追踪阈值过大或过小,都会导致误差的产生。
三、traceboundary 误差的影响1. 图像识别精度下降如果 traceboundary 误差较大,会导致轮廓的准确性下降,从而影响后续的图像识别和分析结果。
2. 计算结果不稳定误差的存在会使得 traceboundary 算法的计算结果不稳定,同一张图像可能在不同的处理过程中得到不同的轮廓结果。
3. 应用受限由于误差的存在,一些对轮廓准确性要求较高的应用,如医学图像分析、工业检测等领域可能无法使用 traceboundary 算法。
四、降低 traceboundary 误差的方法1. 图像预处理在应用 traceboundary 算法之前,对图像进行预处理是十分必要的。
可以通过去噪、边缘增强等技术提高图像质量,从而减少误差的产生。
2. 算法优化通过改进 traceboundary 算法的设计和实现,优化边界像素的选择和连接规则,从而提高轮廓追踪的准确性。
3. 参数调优对于 traceboundary 算法中的各项参数,需要根据具体的图像特点进行调优,使得轮廓追踪结果更符合实际。
cladding concentricity error -回复
cladding concentricity error -回复什么是外包层同心度误差?外包层同心度误差(cladding concentricity error)是指光纤外包层与光纤芯的中心轴线不重合或不完全同心导致的误差。
光纤通常由内核(core)和外包层(cladding)组成。
内核用于传输光信号,而外包层则用于保护内核免受外界环境的损害。
外包层的同心度误差对光纤的性能和传输质量具有重要影响。
如何测量外包层同心度误差?1. 使用显微镜或光学显微镜进行直接观察。
外包层同心度误差通常可通过观察光纤端面和截面来确定。
显微镜可以放大视野,以便检查外包层是否与内核中心轴线对齐。
2. 使用光纤插入损耗仪(fiber insertion loss tester)进行测试。
该仪器可以通过测量输入和输出光信号的强度差异来计算外包层同心度误差。
在测试过程中,光纤端面被连接到测试设备,然后测量传输过程中的光损耗。
常见的外包层同心度误差有哪些?1. 偏心:外包层所在的位置与内核中心轴线不重合,导致光纤的传输性能下降。
偏心可通过测量外包层与内核之间的距离来确定。
2. 不完全同心:外包层的厚度不均匀或呈现非完全同心状态,可能由于制造过程中的问题或外界因素造成。
不完全同心会导致光信号的传输不稳定,影响通信质量。
外包层同心度误差的影响有哪些?1. 光传输损耗增加:外包层同心度误差会导致光信号在传输过程中的损耗增加,降低了光纤的传输效率和距离。
2. 产生多模干涉:不完全同心的外包层会导致光纤内部产生多个传输模式,导致信号叠加和干扰,影响通信信号的清晰度和稳定性。
3. 共振频率偏移:外包层同心度误差会导致光信号的共振频率发生偏移,进一步降低信号的传输质量和性能。
如何减少外包层同心度误差?1. 优化制造工艺:改进光纤制造工艺,以确保外包层与内核的对齐精度。
采用精密的设备和技术可以减少外包层同心度误差。
2. 严格的质量检测:建立严格的质量检测流程,包括外包层同心度误差的测量。
20160121 赛融ADAP激光跟踪测试手册

版本号 V1.0
Page 4 of 12
修改日期 2016-01-21 By Leo Yang
赛融 ADAP 激光跟踪测试手册
九、 机器人标定 Tool 和 Base
把机器人 TOOL 和 BASE 都标定成图示方向。
版本号 V1.0
Page 5 of 12
修改日期 2016-01-21 By Leo YangLeabharlann 6)点击 task 的
,进入配置流程。
版本号 V1.0
Page 6 of 12
修改日期 2016-01-21 By Leo Yang
赛融 ADAP 激光跟踪测试手册
7)
按照箭头指示方向完成激光设定 a) Laser,激光强度时间设置 b) Camera,激光视野,频率选择
c) d)
Filter,过滤反光设置 Algorithm,坡口识别算法选择
赛融 ADAP 激光跟踪测试手册
十、 WeldCom 软件配置及操作
1) 2) 3) 在个人电脑上面安装 WeldCom 软件,并把电脑 IP 修改成 192.168.3.4 用网线连接电脑和激光控制器,并在电脑打开 WeldCom 软件。 输入激光器 IP 地址后点击
4) 5)
打开激光,把机器人 TCP 点移动到标定板上面,并保证标定板坡口(以 V 形坡口形式 为例)位于激光条纹视野范围内。 点击 ,建立新的 part 和 task
3) 4)
点击左下角 windows 图标,打开 RSI-Network 在弹出的 RSI 设置画面点击 EDIT 设置 RSI 的 IP 地址 192.168.2.4
5) 6) 7) 8)
返回 HMI 画面 MenuStart-upNetwork ConfigurationAdvanced 检查 RSI 的 IP 地址 选择 No 退出该页面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Draft:To Appear in ACM Transactions on GraphicsBounded-Error Interactive Ray TracingK AVITA B ALA J ULIE D ORSEY S ETH T ELLERComputer Graphics GroupLaboratory for Computer ScienceMassachusetts Institute of Technology.AbstractRay tracing,which computes radiance,is usually regarded as an off-line rendering algorithm that is too slow for interactive use.In this paper,we present an interactive system that uses four-dimensionalinterpolants to approximate radiance,while providing guaranteed error bounds.Our system exploitsobject-space,ray-space,image-space and temporal coherence to accelerate ray tracing.Our system explicitly decouples the two operations of the ray tracer—shading and visibility deter-mination at each pixel—and accelerates each of them independently.Shading is accelerated by lazilycollecting4D radiance samples,and quadrilinearly interpolating them to approximate radiance.Interpo-lation error does not exceed a bound that the user can change to trade performance for quality.Error isbounded by adaptively sampling at discontinuities and radiance non-linearities.Visibility determination at a pixel is also accelerated by reprojecting interpolants as the user’s view-point changes.A fast scan-line algorithm then achieves high performance without sacrificing imagequality.The combination of lazy interpolants and reprojection speeds up ray tracers substantially forsmoothly varying viewpoints.We expect our techniques to be useful for both interactive rendering aswell as for batch off-line rendering.Keywords:Ray tracing,rendering,error bounds,4D interpolation,interactive,visibility1IntroductionOne primary goal of computer graphics has been the generation of fast,accurate,high quality imagery. Global illumination algorithms generate high quality images by evaluating radiance,afive-dimensional spatial function.To achieve reasonable performance,illumination systems trade freedom of viewer motion for both scene complexity and accuracy in different ways.On one end of the spectrum,ray tracers[41] compute high quality view-dependent images,while compromising on interactivity.Ray tracers typically support specular and diffuse reflectance functions,and generalized primitives,but at the expense of viewing the output image from afixed viewpoint.At the other end of the spectrum,radiosity algorithms[17]tradescene complexity for interactivity.Radiosity algorithms support interactive viewing,but typically render only diffuse,polygonal environments and require a pre-processing phase.Other hybrid systems[9,33,34, 36,40]have tried to bridge the gap between these two extremes.However,the view-dependent component of radiance has been extremely expensive to compute,and ray tracing image quality is traditionally associated with off-line rendering algorithms that are too slow for interactive use.In this paper,we present an interactive system that uses interpolants to accelerate ray tracing[41].The goal of our system is to provide an interactive ray tracing environment in which the user moves around freely as the system renders ray-trace quality images.To achieve this goal,we decouple and independently accelerate the two operations of a ray tracer:the visibility computation that assigns the closest visible object to each pixel,and the radiance computation for that intersection point.A standard ray tracer uses intersection computations for both these operations,which dominate performance[16].In designing and building an interactive ray-tracing environment we have made several contributions: Radiance approximation using4D interpolants:Our system builds interpolants lazily to approximate the radiance computed by a Whitted ray tracer using the Ward shading model[38],henceforth referred to as the base ray tracer.An interpolant is a set of samples used to approximate radiance,and is stored in4D trees called linetrees.As the viewpoint changes,radiance is approximated by quadrilinearly interpolating the per-surface interpolants.Interpolants are subdivided adaptively,thereby permitting greater interpolant reuse where radiance varies smoothly,and sampling at a higher frequency where radiance changes rapidly.Guaranteed error bounds:For every pixel,we guarantee that the relative error between the interpo-lated radiance and radiance computed by the base ray tracer is bounded by a user-specified error.Interpolation error arises from both discontinuities and non-linearities in the radiance function.The error predicate detects both these conditions and prevents interpolation over both discontinuities and non-linear variations in radiance.If the predicate is false,more detailed interpolants are built.The user can use to trade off performance for quality.Accurate visibility determination using linetree reprojection:Visibility determination at pixels is ac-celerated using a novel conservative algorithm for reprojection of4D linetree cells.This algorithm exploits the temporal frame-to-frame coherence in the user’s viewpoint,while guaranteeing that the correct visible surface is detected for each pixel.A fast scan-line algorithm uses the reprojectedlinetrees to accelerate rendering.Our techniques can be integrated with several other approaches to produce faster and better rendering systems:Interpolants could be built in an off-line rendering phase and re-used in an on-line phase to accel-erate walkthroughs.They can also be used to accelerate generation of lightfields[26]or Lumigraphs[18]. The error predicate,which identifies regions of high radiance variation,could be used to guide intelligent super-sampling.The rest of the paper is organized as follows:In Section2related work is presented,with a discussion of how our system is different.In Section3,an overview of the system is presented.In Section4,the interpolant building and storing mechanisms are described in greater detail.We derive analytical expressions for error bounds,and present the error predicate in Section5.In Section6we present the reprojection algorithm, and discuss how it is used.In Section7,we discuss the system implementation and other optimizations to improve performance,and present performance results in Section8.Finally,we present future work and conclude in Section9.2Related WorkSeveral researchers have focused on the problem of improving the performance of global illumination al-gorithms[16,34].For ray tracing,several effective techniques have been developed:adaptive3D spatial hierarchies[15],beam-tracing for polyhedral scenes[24],cone-tracing[2],and ray classification[4].Lack of space prevents us from referring to all the work that has been done in thisfield;a good summary of these algorithms can be found in[16,14].2.1Acceleration of radiance computationSystems that accelerate rendering by approximating radiance can be categorized on the basis of the shading models they use,the correctness guarantees provided for computed radiance,and their use of pre-processing. Some of these systems also implicitly approximate visibility at each pixel by polygonalizing models,or by using images instead of geometry.Teller et al.present an algorithm to speed up shading of a Whitted ray tracer(without texturing)by building4D interpolants that are reused to satisfy radiance queries[35].While their error refinement algo-rithm identifies radiance discontinuities,it is incomplete.Also,they do not exploit temporal coherence todecrease the number of visibility computations.Radiance[40]uses ray tracing and computes diffuse inter-reflection lazily,producing very high quality images by sparsely and non-uniformly sampling the slowly-varying diffuse-interreflections.Radiance also includes an accuracy threshold to guide sampling;gradient information is used to guide sampling density[37].A recent multi-pass rendering system[12]uses multiple passes of the standard graphics hardware to obtain images of higher quality than that ordinarily available using graphics hardware.The drawback of this system is that it approximates visibility determination at pixels by resorting to discretizing the scene into polygons,and has no correctness guarantees.Image-based rendering(IBR)systems,such as the lightfield[26]and the Lumigraph[18],have similar-ities to our system in that they build4D radiance information that is quadrilinearly interpolated to approx-imate radiance.However,IBR systems typically have a data acquisition pre-processing phase,and are not intended to compute radiance on thefly.Lightfields and Lumigraphs are uniformly subdivided4D arrays withfixed resolution determined in the pre-processing phase.Thisfixed sampling rate does not guarantee that enough samples are collected in regions that have high-frequency radiance changes.Additionally,these systems do not compute any bounds on error introduced by approximating radiance or visibility,and they constrain the viewer to lie outside the convex hull of the scene.Nimeroff et e IBR techniques to warp pre-rendered images in animated environments with moving viewpoints[29],but do not guarantee any bounds on error.Finally,several researchers have accelerated ray tracing by exploiting image coherence[3,25,19].The traditional problem with screen-space interpolation is that it may incorrectly interpolate across radiance discontinuities and non-linearities.2.2Algorithms that approximate visibility determinationAlgorithms that exploit temporal coherence to approximate visibility at pixels can be categorized by the assumptions they make about the scene,and the correctness guarantees they provide.Chapman et al.[7,8] restrict the model to be polygonal,and use the trajectory of the viewpoint through the scene to compute continuous intersection information of rays with the polygons.Badt[5],Adelson and Hodges[1],and Mark et al.[28]reuse pixels from the previous frame to render pixels in the current frame.Adelson and Hodges apply a3D warp to pixels from reference images to the current image.Each pixel receives the radiance that would be computed at some reprojected point guaranteed to lie inside the pixel(though not necessarily at the center).This algorithm speeds up thefirst level rays from the eye to the screen but does not accelerateshading computation.Mark et al.[28]also apply a3D warp to pixels,but they treat their reference image as a mesh and warp the mesh triangles to the current image.Their system does not yet handle occlusion due to multiple objects,and assumes that the eye lies on a linear path between the two reference images. Additionally,all of the above algorithms suffer from aliasing effects that arise from the fact that the pixels are not warped to pixel centers in the current frame,i.e.they do not accurately determine visibility.2.3DiscussionWe differ from previous rendering systems in several respects:we do no pre-processing;instead,interpolants are built lazily and ing conservative analytical error bounds,we bound interpolation error, and allow speed and quality to be traded off during rendering.We guarantee correct visibility determination while exploiting temporal coherence by reprojecting4D linetree cells;thus,there are no pixel aliasing artifacts.3System OverviewIn this section,we present an overview of our interactive rendering system(Refer to Figure1).Base ray tracerThe base ray tracer is a classical Whitted ray tracer[41]extended to implement the Ward isotropic shading model[38]and textures.It supports convex primitives(spheres,cubes,polygons,cylinders and cones)and the CSG[16]union and intersection of these primitives.LinetreesRadiance samples are stored in a data structure called the linetree,which is the4D equivalent of an octree. Each object has a set of associated linetrees that store its radiance samples.The4D tree organization permits an efficient lookup of radiance samples for each eye ray.Refer to Section4for details on linetrees. Rendering AlgorithmWhen the system starts rendering a new frame,linetrees from the previous frame are reprojected to the new viewpoint.The system accelerates both visibility determination and shading by using the reprojected linetrees.If a pixel is not reprojected,its shading is still accelerated by interpolating radiance samples from the appropriate linetree leaf.If both reprojection and interpolation fail,the base ray tracer renders the pixel.Figure1:System OverviewIf reprojection succeeds for a pixel,radiance is interpolated for all consecutive pixels in that scanline covered by the same linetree using screen-space interpolation.This is the fast path indicated by bold green lines in Figure1.This path is about30times faster than the base ray tracer(Refer to Section8for details).If no reprojected linetree is available,visibility at the pixel is determined by the slower path of intersect-ing the eye ray with objects in the scene.Once the object visible at a pixel is determined,a check determines the availability of a valid interpolant for that pixel.If an interpolant is available,the radiance for the pixel is computed by quadrilinear interpolation.Otherwise,an attempt is made to build an interpolant by collecting radiance samples for that leaf linetree cell.An error predicate checks the validity of the new interpolant. If the interpolant is valid,the pixel’s radiance can be computed from the new interpolant.If it is not valid, the linetree cell is subdivided,and the ray tracer falls back to shading the pixel using the base ray tracer.In the case where an interpolant can be used to shade the pixel the ray tracer is accelerated since no shading operation needs to be invoked for the pixel.This path is indicated by the dark pink boxes in Figure1.The user’s viewpoint is tracked,and when it is stationary,allowable error is gradually reduced to produce images of higher quality matching the user-specified error bound.When the user’s viewpoint changes,the system renders the scene at the highest speed possible,while preventing interpolation over radiance discontinuities.4Radiance InterpolantsIn this section,we briefly summarize the mechanisms to build and use interpolants(Refer to[35]for more details).First,we present a parameterization of rays that captures all the rays that intersect some volume of 3D space.Then,we present the linetree data structure and the interpolant building mechanism.4.1Ray parameterizationEvery ray intersecting an object,can be parameterized by the ray’s four intercepts with two parallel bounded planes(faces)surrounding[35,26,18],as shown in Figure2.Figure2:Ray parameterizationTo cover the entire space of rays that could intersect,six pairs of faces(called facepairs)surrounding are considered.Each facepair is built by expanding the corresponding faces of’s bounding box appropri-ately.The dominant direction(and sign)of the query ray determine which of the6facepairs to consider for looking up interpolants.Every object has six linetrees(one for each facepair)that store its radiance samples.4.2LinetreesA linetree is a4D tree that represents all the rays that pass through the3D volume defined by the linetree’s front face and back face.Each leaf cell of a linetree corresponds to a4D hypercube in the4D space of rays. The sixteen vertices of the4D hypercube correspond to the sixteen extremal rays spanning the linetree leaf in3D.These rays are the sixteen rays from the four corners of the leaf’s front face to each of the four corners of its back face(Figure3shows eight of these sixteen rays in purple).The4D hypercube captures a region of ray space for which interpolants are built.Every ray that intersects the front and back face of the linetree in3D,lies inside the corresponding hypercube in4D.Given the4D intercepts of a ray,,the linetree leaf cell that contains that ray can be found by walking down the tree and performing four interval tests,one for each of the ray coordinates.,d1> Figure3:LinetreeCellFigure4:Linetree subdivision4.3Building and using interpolantsWhen an eye ray intersects an object,its four intercepts are computed.The associated linetree is traversed tofind the linetree leaf cell containing the intercepts.If the leaf does not contain a valid interpolant, the system builds an interpolant for that leaf cell.Radiance is computed along the sixteen extremal rays from the leaf’s front face to its back face.Additional information about the ray trees along each of the sixteen paths is maintained,as in[35,16].Using the ray trees,and the computed radiance values,the error predicate determines if the samples collected represent a valid interpolant.If so,the radiance for that pixel is quadrilinearly interpolated from the interpolant.If the interpolant is not valid,the front and back face of the linetree cell are subdivided,creating sixteen children of the linetree cell(shown in Figure4).Interpolants are lazily built for the child that contains the eye ray.Thus,linetrees are adaptively subdivided only when necessary.Building interpolants adaptively alleviates the memory problem of representing4D radiance,by using memory only where necessary.More samples are collected in regions with high frequency changes in radiance,accurately representing radiance. Fewer samples are collected in regions with lower frequency radiance changes,saving computation andstorage costs.Plate1demonstrates the linetree data structure and interpolant building mechanism.Plate1-Figure(1)is a snapshot of the sphere’s linetrees(the sphere is shown in Plate2).In thisfigure,each linetree is represented by its front and back face.Plate1-Figure(2)is a snapshot of the interpolant building process.5Error PredicateRendering systems trade accuracy against speed by using error estimates to determine where computation and memory resources should be expended.Radiosity systems have developed explicit error bounds[22,27] to make this trade-off.Ray tracing computations typically use super-sampling and stochastic techniques[30, 10]to estimate and decrease the error in computed radiance.We have derived analytical error bounds both for the Ward isotropic shading model and the Phong shading model,though in this paper we only discuss the results for the Ward model.(It is straightforward to extend these results to handle surfaces with non-isotropic BRDFs as well.)Error predicate guaranteeThe error predicate receives as input the sixteen radiance values of a linetree leaf cell and their associated ray trees,and determines if it will be possible to guarantee that the interpolated radiance is always within a user-specified of the radiance computed by the base ray tracer.Therefore,the error predicate guarantees the following:Using quadrilinear interpolation the interpolated radiance values are within of the radiance computed by the base ray tracer for every ray that lies in that linetree leaf cell.We mustfirst understand how interpolation can violate this guarantee.Incorrect interpolation arises in two possible ways:Interpolation over a discontinuity in the radiance function(due to shadows,occluding objects or TIR cones)Interpolation over regions with high order radiance variations(due to diffuse or specular peaks) In Section5.1,techniques are presented to detect and avoid interpolation over discontinuities,while in Section5.2analytical expressions to bound the interpolation error are presented.Together these techniquespresent a complete definition of the error predicate which guarantees that the interpolated radiance lies within of the user-specified error for all rays.(a)Occlusions(b)Shadows(c)Figure5:Radiance discontinuities and causes;in each case interpolation for the green(dark)ray would be erroneous.5.1Radiance discontinuitiesAn interpolant is invalid if it interpolates radiance over a radiance discontinuity.In this section wefirst present the reasons why radiance is discontinuous in an image,then we present techniques to detect these discontinuities.5.1.1Cause of discontinuitiesRadiance discontinuities arise because the scene is composed of multiple geometrical objects that occlude each other and cast shadows on each other.Figures5-(a),5-(b),5-(c)and6show invalid interpolation due to radiance discontinuities in2D.The black rays are the four extremal interpolant rays for the2D linetree,and the green ray is a query ray that lies in the convex hull of the extremal rays.In Figure5-(a)the extremal(black)rays hit different objects while the internal(green)ray could completely miss the objects. In Figure5-(b)the extremal rays all hit the same object but an internal ray could hit an occluding object.In Figure5-(c)interpolation would not capture the shadow cast on the rectangle by the circle.In all these cases it would be incorrect to interpolate radiance using the samples associated with the extremal rays.Figure6depicts discontinuities that arise due to total internal reflection(TIR).All rays outside the TIR cone are reflected back into the dense medium.In Figure6-(a),the interpolant rays lie in the TIR cone but the query ray does not;in Figure6-(b)the interpolant rays lie outside the TIR cone while the query ray lies in the cone.In both cases,interpolation would not detect the radiance discontinuity and would produce incorrect results(indicated by the red cross on the query ray).A more detailed presentation can be found in[35].SparseDense (a) Total Internal Reflection (b)DenseFigure 6: Erroneous interpolation due to total internal reflection. 5.1.2 Detecting discontinuitiesThe error predicate detects discontinuities by maintaining additional geometrical information, ray trees [32, 35], with each interpolant ray. Using the ray trees the predicate detects self-shadows, occlusions, visibility changes, etc. which could potentially cause incorrect interpolation. A ray tree keeps track of all objects, lights and occluders that contribute to the radiance of a particular ray, both directly and indirectly through reflections and refractions. A ray tree node stores the object intersected by the eye ray, and the lights and occluders visible at the point of intersection. The children of the ray tree node store the ray trees associated with the corresponding reflected and refracted rays. Each primitive in the ray tracer is considered to be built of a finite number of smooth faces. For example, a cube has six faces, a cylinder has three faces and a sphere has only one face. The face index is also stored in the ray tree node and used in ray tree comparisons. A crucial observation is that, radiance changes discontinuously only when the associated ray tree changes. To guarantee that interpolants do not erroneously interpolate over a radiance discontinuity, all rays in the 4D hypercube represented by the linetree cell should have the same ray tree. The error predicate conservatively determines validity for each possible discontinuity in the following way: Geometry changes and Shadows: If the ray trees of the sixteen extremal rays are not the same, the interpolant is not valid. Occluders: While the above condition is necessary it is not sufficient: it does not guarantee that all rays in the linetree have the same ray tree. There could be occluding objects between the sixteen extremal rays. These occluders are detected using a variant of shaft-culling [21, 35]. 11Total Internal Reflections: If a ray tree includes an edge representing rays traveling from a dense to sparse medium the error predicate reports that the interpolant is invalid.5.2 Radiance non-linearityQuadrilinear interpolation approximates radiance well in most regions of ray space free of discontinuities. However, quadrilinear interpolation is not sufficient where there are significant higher-order radiance terms, which are created by specular highlights and diffuse peaks. In this section, we conservatively bound the deviation between radiance computed by the base ray tracer and interpolated radiance for all the rays represented by a linetree. We derive analytical error bounds for the diffuse and specular components of radiance in terms of the linetree parameters a function of(a; b; c; d), the constant and linear terms are approximated well by quadrilinear interpolation;(a; b; c; d), and the object’s surface parameters.When radiance is expressed astherefore, these terms are not considered in error computation. Instead, we focus on the contribution of the quadratic terms (cubic and higher terms are dominated by the quadratic terms [31]). The total error bound for a linetree cell is computed using its associated ray tree. The radiance associated with a ray tree node is a local shading term plus a weighted sum of the radiance of its children. Therefore, error in its radiance is bounded by the error in its local shading term plus the weighted sum of the error of its children. Error in the local shading term can arise from the approximation of both diffuse and specular radiance. Given an incident ray that intersects an object at a point pxn , the diffuse radiance for that ray is ~D=d (NL), and the specular radiance is given by the Ward isotropic shading model [38]:S = 4s e? 12 (1? (N 1 )2 ) H2sN L N Iwhere N is the normal to the surface at pxn , L is the vector to the light source at pxn , I is the incident ray, ~ ~p and H is the half-vector [13]. For an infinite light source, the light vector L is independent of ~xn and isgiven as1 2 3 2 1 2 2 2 3Lp ?pxn ~ L = (l ; l ; l ), where l + l + l = 1. For a local light source, L = kLp?pxnk where Lp is the ~position of the light source. Our error analysis handles error that arises both from non-linearity in the shading model, and from curvature in objects. First, we derive error for the case of a rotated and scaled paraboloid, since a paraboloid 12is a representative quadric surface. Using these analytical error bounds for paraboloids and simple transformations to match specific sections of convex objects to the paraboloid, radiance error bounds are derived for the various ray tracing primitives. 5.2.1 Analytical error for a paraboloidWithout loss of generality, we consider a scaled, rotated paraboloid to represent the sections of objects inside a linetree cell. All points on the paraboloid satisfy the constraint equation paraboloid’s coordinate system0(x0 ; y0; z0 ). The linetree cell’s facepair is perpendicular to the z axis; its front face is centered around (X ; Y ; W ) and its back face is centered around (?X ; ?Y ; ?W ) (See Figure 7).0 0 0z0 + x0 + y0 = 0 in the2 2dy’z’ c b x’ aFigure 7: A rotated and scaled paraboloid at the center of the linetree cell. The transformation between the paraboloid’s object-space axes and the linetree’s world-space axes is given by a matrix M that combines an arbitrary rotation matrix and a scaling matrix :S(x0 ; y0; z0 ) = M(x; y; z)where rotation allow the paraboloid to approximate any convex surface near the intersection point. sx and sy are equal to half the reciprocal curvature of the represented surface along the x0 and y 0 axes respectively. For a plane, sxM = S. S scales by sx on the x0 axis, sy on the y0 axis, and 1 on the z0 axis [23]. This scaling and= sy = 0, while for a sphere, sx = sy =z = W and z = ?W respectively, a ray parameterized by (a; b; c; d) represents a ray in 3D space from (a + X ; b + Y ; W ) to (c ? X ; d ? Y ; ?W ).Since the front and back faces of the linetree cell are at0 0 0 01 2R.13Therefore, the unnormalized incident ray isI = (c ? a ? 2X ; d ? b ? 2Y ; ?2W ). Since the linetree cell is0 0guaranteed to be free of discontinuities (Section 5.1), every ray intersects the paraboloid at some point pxn , ~z0 + x0 + y0 = 0. Using the constraint that pxn lies on both the incident ray and the ~ paraboloid we can solve for pxn in terms of (a; b; c; d). The constraint equation is a quadratic in z , which ~ can be solved to second order in (a; b; c; d). For a sufficiently small linetree cell, the intersection point is p where ~xn satisfies2 2close to the origin, and to second order is a perturbation to the intersection of the ray with the tangent plane at the origin:C z = ? B (1 + AC ), where A; B; C are the coefficients of the quadratic. B2This approximatezis used to compute the point of intersection and the normal, which are then used to estimate error in diffuse and specular radiance. Using this technique, we derive the diffuse radiance error for an infinite light source:di? ? = c 2C 0 a (K L0 + K L0 ) + d2C 0 b (K L0 + K L0 ) + ! c + a (K + K )(C0 L0 ) + ((s ? 1)K + (s ? 1)K )L0 x y C0 2C 0 ! b + d (K + K )(C0 L0 ) + ((s ? 1)K + (s ? 1)K )L0 x y C0 2C 02 2 2 2 2 3 31 11 1 21 2 2 3 32 12 1 22 2 2 2 2 3 2 11 2 21 2 3 2 11 2 2 21 3 2 2 2 12 2 22 2 3 2 3 2 12 2 2 22 3whereC0 and L0 are the center of the linetree and the light expressed in the paraboloid’s coordinate system respectively (C0 = MC; L0 = ML), and Kij = C 0 Mij ? C 0 i M j . For a plane, sx = sy = 0; therefore, di is 0, which is what we would expect since the diffuse radiance3 3for a plane illuminated by an infinite light source is constant. Using a similar technique, the error for diffuse radiance with a local light source is:dl=wherea +c 2C 0 kLk K M + K M + K K (M + M ) ? (K + K )(C 0 M + C 0 M + WM )=C 0 ? M W (K M + K M ) + b + d K M + K M + K K (M + M ) ? 2C 0 kLk (K + K )(C 0 M + C 0 M + WM )=C 0 ? M W (K M + K M ) + c ? a (K M + K M + M M W ) + d ? b (K M + K M 31 + M M W ) 4C 0 kLk 4C 0 kLtk Lp di is the diffuse error term with light L = kLp k . Note that in the limit as kLk tends to 1, i.e., when2 2 2 3 2 11 11 2 21 22 11 21 12 21 2 11 2 21 1 31 2 32 33 3 31 11 13 21 23 2 2 2 3 2 12 11 2 22 22 12 22 12 21 2 12 2 22 1 31 2 32 33 3 32 12 13 22 23 2 2 2 2 4 3 12 31 22 32 32 33 4 3 11 31 22 31 33di +14。