模块驱动笔记
英飞凌IGBT模块安装说明应用笔记

若需获得关于技术、交付条款和价格的更多信息,敬请联系距离您最近的英飞凌办事处()
警告
由于技术要求,组件可能包含有害物质。若需了解相关物质的类型,请联系距离您最近的英飞凌办事处。如果 可以合理地预计英飞凌的某个组件可能会导致生命支持设备或系统失效,或者影响该等设备或系统的安全性或 有效性,那么在将该等组件用于生命支持设备或系统之前,必须获得英飞凌的明确书面同意。生命支持设备或 系统意指用于植入人体内部,或者支持和/或维持、维系和/或保护人类生命的设备或系统。如果这些设备或系 统失效,可以合理地假设其用户或其他人的健康将受到威胁。 AN 2006-05 修订记录:2011 年 1 月 31 日 V2.0 先前版本:2006 年 7 月 1 日 V1.0 在上一版本的基础上作出的主要更改:一般修订;采用 PressFIT 技术安装 PCB 电路板:第二章第 5-11 页 全部:第二次发布 作者:Martin Knecht(IFAG IMM INP MP)
1.2 静电敏感元件的处理
IGBT 模块是静电敏感元件。静电放电(ESD)可能导致这些模块被过早损坏甚至毁坏。 为了防止静电放电造成元件毁坏或过早损坏,所交付的元件均采用了适当的静电防护封装,符合公认的 ESD 法规要求。 要拆卸静电防护装置,处理未受保护的模块,必须在符合 ESD 法规要求的工作场所中执行。如需了解 更多信息,请参考诸如 IEC 61340-5-1 和 ANSI/ESD S2020 等 ESD 安装准则。
图 2: EconoDUAL™ 3 模块上的 PCB 电路板安装支脚(红圈)
-5-
N 2010-03 2009
应用笔记 AN 2006-05 V2.0,2011年1月
取决于所安装的具体 PCB 电路板的厚度和重量,拧入 PCB 电路板安装支脚内的有效螺纹长度应当至少 为 lmin 4 毫米,且最长不超过 lmax 10 毫米。
vxworks 串行设备驱动的编写笔记

VxWorks 串行设备驱动的编写一、概述vxWorks的串行设备的驱动不同于一般的设备的驱动。
一般的设备都是在系统初启的时候调用xxDrv()来安装diver table。
然后,调用xxDevCreate()来将该设备描述符xx_DEV加入到device table中。
在应用层用设备的时候,直接通过fd→device list→driver table的顺序调用相应的驱动函数即可。
他们的层次关系是:应用→I/O system ←→driver。
层次关系很明确。
然而串行设备的层次关系就不完全是这样子的。
基于许多因素的考虑,vxworks的串行设备的驱动分成了如下图所示的几层:图1 串行设备驱动代码的分层结构从图中可以看出:系统中的串行设备驱动总共有3层。
其中,usrConfig.c和ttyDrv(包括tyLib)提供了一些对串行设备的一些通用操作。
sysSerial.c中一些对不同开发板(系统)中串行设备有关的一些数据结构进行初始化。
所以,称之为Implementation specific code。
最后,的xxDrv.c当然是包括了一些具体设备相关的驱动/操作。
(比如读写数据,设置等)说道这里我们来回过头来看看,包含了串行设备的系统的总体的一个模型:图2.系统的模型从上图看出串行设备的驱动xxDrv并不是直接和I/O system交互的。
中间存在一个ttyDrv(包括tyLib)。
实际上,在diver table中安装的不是xxDrv的函数而是ttyDrv/tyLib提供的函数。
另外,Target Agent可以和xxDrv交换,方便系统的调试。
TtyDrv(包括tyLib):可以称之为一个虚拟的设备驱动。
因为他只是介于I/O与底层的具体设备的driver之间,为系统提供的统一的串行设备的界面。
另外,还可以调用具体硬件的管理驱动。
总之,ttyDrv给系统提供的是一些通用的管理函数(缓冲管理,互斥等)。
DDK驱动开发笔记

DDK驱动开发笔记1、windows驱动分为NT式驱动和WDM式驱动,前者为非即插即用,后者为即插即用驱动。
需要头文件分别为NTDDK.h和WDM.h2、驱动的入口函数均为extern "C" NTSTA TUS DriverEntry(IN PDRIVER_OBJECTpDriverObject, IN PUNICODE_STRING pRegistryPath),它由I/O管理器负责调用,前参数为传递进来的驱动对象,后参数为Unicode字符串,指向此驱动的注册表。
3、驱动程序向windows的I/O管理器注册一些回调函数,回调函数是由程序员定义的函数,由操作系统负责调用,只要把地址告诉操作系统即可如:pDriverObject->DriverUnload=HelloDDKUnload;4、使用CreateDevice函数创建驱动设备对象如:CreateDevice(pDriverObject);返回NTSTATUS类型5、KdPrint是一个宏,用于打印输出信息,在Checked中会使用DbgPrint代替,在Free版本中无效果,用法和TRACE一致。
6、Windows的设备管理是使用线性链表进行管理,每一个节点记录了设备对象的地址,每次要对指定驱动进行操作,就必须先遍历设备对象链表。
7、设备对象函数NextDevice域记录下一个设备对象的地址,IoDeleteDevice用于删除设备对象如:IoDeleteDevice(pDevExt->pDevice),IoDeleteSymbolicLink用于删除设备符号链接。
8、DDK环境编译驱动源程序,需要使用两个自己创建的脚本makefile和Sources,最好使用二进制文本格式,makefile的内容固定为:!INCLUDE $(NTMAKEENV)\makefile.def。
sources文件记录了驱动的名称、驱动类型、编译输出目录、include目录、指定源文件。
UGNX官方培训加工模块笔记整理

UGNX12加工学习老丁笔记整理面铣削:与型腔铣削类似,可全选底面设定加工范围。
只有第三个才能实现,面区域铣削。
有地方铣削不到可以调节铣削参数。
铣削完成后,每层都有不同深度的余量,还需要再精加工面。
平面铣削有严格的边界控制,不会过切。
面铣,只是把零件设为参考,在公差允许的情况下,它容易过切但本身不认为是过切。
是靠余量来进行控制。
面铣选项具有刀具延展量,平面铣没有。
各有优缺点。
直接指定毛坯厚度为加工厚度“工具”---“工序导航器”----“删除设置”选项,适用于选错设置后,重现加工设置选项。
面铣适用于平底直面。
面铣与平面铣不同之处在于前者可以认可几何体形状。
后者只认可轮廓。
跟随部件选项特点:既考虑周边,也考虑部件。
保证全部顺铣,跳刀多,刀具磨损快。
跟随部件中,切削参数—连接—开放刀路—变换切削方向,省时间,刀路合理。
刀具延展量,用于设置刀具延展到毛坯边界外的距离,十分有必要设置。
平面铣中没有,面铣中才有。
跟随周边:跟随部件最大轮廓,不同深度不同轮廓。
“跟随周边”中才有“向内向外”加工选项。
刀路简单,一般作为首选。
有“岛清根”和“壁清理”选项。
两者都可“添加精加工刀路”配合加工。
UG4版本用跟随周边容易过切,所以一般都用跟随部件。
但到UG7以上就没有这问题了。
轮廓精加工摆线切削:适用于高速切削,在凸角处不选“绕对象滚动“选项。
非切削移动选项中,区域内,尽量选择“前一平面”降低抬刀高度。
通过“区域起点”选项选择进刀点。
部件余量:零件周边壁上的余量。
壁余量:零件侧壁面上剩余的材料。
若面铣削中没有指定侧壁几何体,则侧壁余量不起作用。
若指定部件余量2,指定壁余量1,在没有指定壁的情况下,侧壁余量2.在个别指定壁的情况下,指定壁余量1,没有指定的壁余量2,不牵扯底面余量。
最终底面余量:加工后留在腔底和岛屿顶部的余量。
安全设置:使用继承的。
会观察刀路颜色来区分进退刀切入切出路线。
刀具可视化中,会用选择颜色来表示厚度,来观察余量。
PCS7笔记

一、前两天做单元测试,做了几个模块的通道采集,有几十个点,没问题,编译和CPU运行都正常,没有错误和警告,于是我就大规模的复制组态,才编了300多个AI的通道采集(ch_ai+meas_mon),编译就出现错误和警告了,内容如下:W: In OB100 there are 217 blocks / runtime groups / SFC charts installed. This can lead to problems w hen compiling with the SCL compiler.W: CFC_B1QISHUI 352 blocks are inserted in the runtime group in OB35. This can lead to problems du ring compiling with the SCL compiler.E: E: Maximum length of code area reached (max. 64 Kbytes).W: W: Code generator not called because of an error.是何原因引起,该修改何处??1、这个提示是:在被OB35 调用的名称为“CFC_B1QISHUI”的运行组,和被OB100 中调用的CFC功能块,已分别被插入了352 个和217个CFC程序块,超过了每个运行组所允许插入的CFC程序块数量;2、任意打开一个CFC程序块,鼠标点击菜单栏“Options”→“Customize”→“Compile/Download”;3、在弹出的窗口中,可看到“Installed blocks per runtime group or OB:”项中,CFC编译系统自动默认设置的数值为50。
即只允许每个运行组插入的CFC程序块数量为50。
4、你可以修改“Installed blocks per runtime group or OB:”项中的数值,但建议最好不要增/减允许值。
mptsas驱动阅读笔记

1. MPTSAS概述本文主要对1000系列软RAID产品中所涉及的LSISAS1068E SAS控制器驱动部分作了分析。
限于项目需求与时间,本文重点分析了MPTSAS驱动的结构、SAS 控制器初始化过程、以及磁盘热插拔事件的响应过程。
LSISAS1068E是一个基于Fusion-MPT架构的SAS控制器。
Fusion-MPT技术由LSI Logic开发,旨在为客户提供更为容易的实现SCSI和Fibre Channel的解决方案。
这种开放式的Fusion-MPT架构具有高I/O性能,同时还能降低产品验证的时间和推向市场的时间。
LSI Fusion-MPT基于行业标准的ARM处理器技术,支持Ultra320 SCSI,Fibre Channel,SAS接口,并可以对将来出现的其他接口扩展。
Fusion-MPT技术主要包括Fusion-MPT固件,SAS、U320 SCSI、Fibre Channel 硬核,和操作系统级的驱动程序等部分。
如图1.1所示,Fusion-MPT架构中使用统一的固件及驱动来支持所有基于Fusion-MPT技术的I/O控制器。
图1.1 Fusion-MPT 架构如图1.2所示,Fusion-MPT架构可分为操作系统层和硬件层两部分,而从驱动程序设计的角度,又可进一步将其分为驱动、固件和硬件三个功能层次。
图1.2 Fusion-MPT架构框图Fusion-MPT在硬件层之上构建独有的固件层,不同的固件为上层驱动程序提供对SCSI或FC的支持,以及高级的集成RAID等功能。
固件层有效地将驱动程序同硬件隔离,对上层驱动程序提供统一的MPI ( Message Passing Interface )接口,使同一驱动程序可以应用于不同的底层硬件系统,有助于加速应用开发。
驱动层对上层操作系统提供功能函数接口,通过MPI访问固件层,实现操作系统对硬件的访问,并且按照通信协议实现相关的帧封装和拆解。
MTK平台驱动调试笔记

分类:LINUX一、【一】调试串口的设置驱动的调式过程经常需要通过trace工具看log的,trace前需要修改手机串口,有以下三种方法设置串口1 通过手机进入工程模式设置2 修改代码,修改Nvram_user_config.c中的NVRAM_EF_PORT_SETTING_DEFAULT[]3.通过META工具修改在连上meta:左上角选中NVRAM Editor,在跳出的对话框里选择other LID,再选择NVRAM_EF_PORT_SETTING_LID,接下来read from nvram,对话框右边就会出现串口的设置情况,对调tst_port_ps(输入0)和ps_port(输入99)的值,二【【二】关于gpio口Gpio的初始化在文件gpio_drv.c里,可以用MTK提供的工具配置也可以用代码在程序里直接操作,二者的选择要看有没有定义宏__CUST_NEW__工具初始化时要注意配置codegen.dws,该文件里配置的只是对gpio口的初始化,并不是所有的gpio口都要设置成工作时的模式,尤其是当作时钟和蓝牙部分的gpiio口,初始化时就设置成工作模式的话会造成电机电流过大的。
代码初始化时DRV_WriteReg()、DRV_Reg对gpio口寄存器操作,分别定义gpio口的模式,和方向(0:输入;1:输出),对单个gpio口操作用到以下函数(以gpio25为例):GPIO_ModeSetup(25, 0);设置GPIO25为模式0GPIO_InitIO(1,25);初始化GPIO25方向为输出GPIO_WriteIO(0, 25 );设值GPIO25输入低电平0三、【三】键盘设置1)键盘定义Keypad_def.c如果定义CUST_NEW,工具中的键盘定义对应在改文件里的KEYPAD_MAPPING(keypad_drv.h);2)硬件键盘定义与软件mmi键盘的对应nKeyPadMap[](Keybrd.c)3)工程模式键盘测试函数EntryFMKeypadTest()修改键盘测试时界面显示的键的名称1. 做好上面的第一第二两步2. FactoryModeSrc.c开始部分定义添加的键所要显示的名称,值,分别应用到keypad_layout[](确定要显示的位置),keypad_value[]3.在EntryFMKeypadTest()函数中的数组IdleScreenDigits[]里添加要显示的键4)如果要设置一个键不管在什么界面下都起作用的话(如手电筒开关或则其他需求)就需要在键盘的事件响应函数static voidKeyEventHandler(KEYBRD_MESSAGE *eventKey)里设置,根据键值条用相应的响应函数,不过该函数及时在锁屏状态下也会执行的,需要根据需要添加条件语句四、关于LCDlcm背光驱动分为两种控制方式:1. pwm这个是通过调占空比来调节亮度的持续信号;2. PFM这个是通过脉冲的个数来控制LCM背光亮度。
IGBT模块:技术、驱动和应用

阅读感受
在驱动和应用方面,书中详细介绍了IGBT模块在各种场合下的应用情况,包 括伺服电机、变频器、变频家电等领域。这些应用案例充分展示了IGBT模块在电 力电子设备中的广泛应用和重要性。书中还针对不同应用场景给出了具体的驱动 方案,为读者提供了实用的参考信息。
阅读感受
《IGBT模块:技术、驱动和应用》这本书为我提供了一个全面了解IGBT模块 的窗口,让我对这种重要的电力电子器件有了更深入的认识。通过阅读这本书, 我不仅了解了IGBT模块的基本知识和技术特点,还对其在各种场合下的应用有了 更清晰的认识。这本书对于从事电力电子领域工作的专业人士和学生都具有很高 的参考价值。
目录分析
接下来,本书的第二章和第三章分别从技术和驱动两个方面对IGBT模块进行 了详细介绍。其中,第二章主要介绍了IGBT模块的工作原理、结构特点、制造工 艺以及性能评估等内容。通过这一章的学习,读者可以深入了解IGBT模块内部的 电子器件以及它们之间的相互作用,为后续的学习打下坚实的基础。
目录分析
目录分析
目录分析
《IGBT模块:技术、驱动和应用》是一本全面介绍IGBT(绝缘栅双极晶体管) 模块的权威著作,其中涵盖了从技术原理到实际应用的全过程。这本书的目录结 构严谨,层次分明,使得读者可以轻松地按照章节顺序进行阅读,同时也能够帮 助读者更好地理解IGBT模块的相关知识。
目录分析
本书第一章对IGBT模块进行了概述,让读者对IGBT模块有了初步的了解。这 一部分主要介绍了IGBT模块的基本概念、特点、应用场景以及发展趋势。通过这 一章的阅读,读者可以建立起对IGBT模块的整体认识,为后续深入学习打下基础。
精ቤተ መጻሕፍቲ ባይዱ摘录
“在选择IGBT模块时,我们需要考虑其额定电压、额定电流、开关频率等关 键参数。还需要考虑其封装形式、热性能和价格等因素。”
FX2N-1PG学习笔记(完成)

FX2N-1PG定位模块一、介绍FX2N-1PG为脉冲发生器单元(简称PGU),可以完成一个独立轴的简单定位控制,通过向伺服电机或步进电机的驱动器提供指定数量的脉冲(最大100Kpps)来实现的。
FX2N-1PG是连接FX2N系列PLC的扩展模块,使用FROM/TO指令来与PLC进行数据传输,并占用8点输出或输入点。
二、端子的分配3、步进电机接线图4、三菱伺服电机MR-E接线图2、BFM#2、#1进给速率是电机转动一圈时的机器移动量,根据用途有不同的单位。
注:如果电机系统的单位被选择时,无须设置该参数。
3、BFM#31)单元系统(b1、b0)影响的位置数据:HP、P1、P2、CP;4)5、BFM#6起动速度(Vbia启动时速度。
)6、BFM#8、#7JOG速度(VJOG手动前进或后退的速度。
7、BFM#10、9原点返回高速速率(V)RT返回原点时的高速运行段速度。
)8、BFM#11原点返回爬行速率(VCR返回原点时,近点标志(DOG)动作后的速度。
9、BFM#12用于原点返回的0点标志数目(N)近点标志(DOG)与0点标志之间的脉冲数。
10、BFM#14、#13原始位置(HP)这是机器返回的原点位置,当原点返回操作结束后,此处设置的值被写入当前位置(BFM#27、#26)11、BFM#15加速/减速时间(Ta)从起动速度直接运行到最大速度之间的时间。
12、BFM#18、#17设置位置1(P1)运行时的目标位置或操作时的移动距离。
13、BFM#20、#19运行速度1(V1)单速运行时的运行速度。
14、BFM#22、#21设置位置2(P2)在双速定位操作下的第二个速度的设置位置。
15、BFM#24、#23运行速度2(V2)1234567动⑥如果当前位置在DOG动作中(下图2号位置),那电机先高速后退出DOG信号块,再从第②点开始继续原点返回的工作。
⑦如果当前位置在DOG信号块之后(下图3号位置),那电机先高速前进至限位,再后退到退出DOG信号块,再从第②点开始继续原点返回的工作。
STM32F10xxx微控制器的QVGA TFT-LCD直接驱动应用笔记说明书

AN3241应用笔记QVGA TFT-LCD直接驱动使用STM32F10xx FSMC外设前言本应用笔记讲解的低成本解决方案可使用任何未配备片上LCD控制器的STM32F10xxx微控制器,直接驱动QVGA TFT-LCD。
强大的STM32F10xxx器件具有嵌入式的FSMC(灵活的静态存储控制器),它可与片上DMA控制器共同使用,实现对TFT-LCD的直接驱动。
此低成本解决方案为数字相框、独立信息显示器、静态广告板等应用的理想选择。
本应用笔记说明了怎样将STM32F10xx用作LCD控制器,驱动一个与FSMC接口的QVGA3.5" TFT面板。
此解决方案实现的优化意味着仅需1% CPU负荷即可显示静态图片。
固件的演示已在320x240像素分辨率的CT05350DW0000T QVGA 3.5" LCD模块上开发并测试。
2014年11月Doc ID 17695 Rev 11/21目录AN3241目录1STM32 QVGA TFT-LCD直接驱动 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1STM32 QVGA TFT-LCD直接驱动原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . 32STM32 QVGA TFT-LCD驱动实现 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1QVGA TFT-LCD信号与STM32F10xx FSMC接口 . . . . . . . . . . . . . . . . . . 62.2图片格式与分辨率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3图片源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4STM32 QVGA LCD-TFT直接驱动流程 . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4.1显示模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5TFT-LCD背光控制 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 3硬件参考设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134固件包 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16库 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16项目. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.1固件安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.2如何配置QVGA TFT-LCD参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 5结论 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 6修订历史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202/21Doc ID 17695 Rev 11 STM32 QVGA TFT-LCD直接驱动STM32微控制器具有一个嵌入式的灵活静态存储控制器(FSMC),可连接NAND、NOR、SRAM、PSRAM等外部存储器接口。
高通Sensor驱动学习笔记

⾼通Sensor驱动学习笔记⾼通ADSP Sensor框架:⾼通SEE Sensor框架:msm8960之前是adsp(Audio DSP)架构,现在换成SEE(Sensor Exclute Environment)架构了。
⼀、ADSP(Audio DSP)架构1. adsp架构简介 最初的时候芯⽚⼚家对sensor的处理和对待其它外设⼀样都是直接挂在processor上,sensor的驱动也和其他linux或android的驱动⼀样,⽣成对应的设备节点给上层提供数据。
但后来这⼀切发⽣了变化,最主要的原因就是功耗。
Sensor希望⾃⼰能够⼀直处于⼯作状态下,如计步器等应⽤场景。
这样如果sensor还挂在主processor上势必影响待机功耗。
因此各个芯⽚⼚推出了各⾃的⽅案,如sensor-hub等等。
⾼通在MSM8960之后就将sensor的处理塞到了⼀个单独的⾳频dsp中了(MSM8953中这个dsp叫作aDSP),这样待机时主处理器休眠降低功耗,由这个aDSP在处理⾳频数据的间隙捎带着就能把sensor的数据处理了。
2. 以MSM8953为例的ADSP架构图3. 在应⽤处理器中,软件接⼝中不再有每个sensor的设备节点了。
那有的是什么呢,只有Sensor1 API Socket Remoting Layer层对应的(CPU与ADSP之间是通过Socket通信的!)API接⼝。
4. 那么ADSP与应⽤处理器之间⽤什么机制进⾏通信呢?图中可以看到⼀个叫QMI的东西,就是它了,这个⾼通基于共享内存机制开发的多核间通信技术,在应⽤处理器侧和ADSP侧都有相应的库已经完成了底层实现。
之后有机会分析⼀下这种号称最为有效的多核间通信技术。
5. ADSP与CPU之间通过QMI进⾏通信的。
QMI就是⾼通基于共享内存机制开发的多核间通信技术。
6. 系统带有的传感器测试代码系统⾃带的:hardware\libhardware\tests\nusensors\nusensors.cpp作⽤:可以列出系统中存在的所有的传感器,监听并打印出传感器的数据。
英飞凌IGBT模块应用笔记

英飞凌IGBT模块应用笔记目录1 摘要2 导言2.1 数据表的状态2.2 型号命名规则3 数据表参数——IGBT3.1 集电极-发射极电压VCES3.2 总功率损耗集电极-发射极电压Ptot3.3 集电极电流IC3.4 重复性集电极峰值电流ICRM3.5 反向偏压安全运行区域RBSOA3.6 典型输出和传递特性3.6.1 IGBT器件结构以及IGBT与功率MOSFET在输出特性上的区别3.6.2 传递特性和输出特性(IGBT数据表)3.7 寄生电容3.7.1 测定电路3.7.2 栅极电荷Qg和栅极电流3.7.3 寄生导通效应3.8 开关时间3.9 短路3.10 泄漏电流ICES和IGES3.11 热特性4 数据表参数——二极管4.1 正向电流IF和正向特性4.2 重复性峰值正向电流IFRM4.3 反向恢复4.4 特热性5 数据表参数——NTC热敏电阻5.1 NTC阻值5.2 B值6 数据表参数——模块6.1 绝缘电压VISOL6.2 杂散电感LS6.3 模块电阻RCC’+EE’6.4 冷却回路6.5 安装扭矩M7 参考资料1 摘要注释:本应用笔记中给出的下列信息仅作为关于实现该器件的建议,不得被视为就该器件的任何特定功能、条件或质量作出的任何说明或保证。
本应用笔记旨在对IGBT模块的数据表中给出的参数和图表予以解释。
本应用笔记有助于要求使用IGBT模块的功率电子元件的设计者正确地使用该数据表,并为其提供背景信息。
文章来源:/jc/255.html数据表中提及的每一项参数都给出了尽可能详细地表明该模块的特性的值。
一方面,有了这些信息,设计者应当能够对不同竞争对手提供的器件进行相互比较,另一方面,根据这些信息,设计者应当足以理解该器件的局限性所在。
本文档有助于更加深刻地理解数据表中标示的参数和特性。
本文档解释了这些参数与诸如温度等条件的影响之间的相互作用。
提及动态特性试验的数据表值,如开关损耗,均与具备确定的杂散电感和栅极电阻等等值的特定试验设置有关。
w5500驱动使用方法调试笔记

w5500驱动使⽤⽅法调试笔记
1、w5500有两种⽅式可以运⾏的,server端⼀般⽤中断的⽅式,效率⽐较⾼,client使⽤查询的模式,本⾝⾃带2k的发送缓存和2k的接收缓存。
2、查询模式:有数据的时候,查询模式可以每隔⼀段时间去查询,有数据是读出,没有数据的继续查询,挺⽅便的。
这个代码我参考的野⽕的驱动。
3、中断模式:当服务器使⽤时,还是需要使⽤中断模式,因为技术代理说最好不要⽤,但我使⽤了中断,感觉没啥问题,但是有⼀个点需要注意的。
4、中断模式的注意点:
因为w5500有很多中断的,连接超时中断,接收中断,发送中断,链接成功中断,断开成功中断。
可以使能,也可以屏蔽,具体可以看看数据⼿册,有中⽂版的。
调试过程:
我把发送完成中断取消了之后,发现还是有提⽰发送完成的信息,我以为没有关闭,⼀直瞎调试,后来看看波形之后,的确是关掉了,所以正如⼿册所说的,屏蔽位清0了,即便发送了中断,他上会在int引脚中产⽣下降沿,因此就屏蔽了。
总结:因为发送完成中断在我这⾥不需要,上位机会根据收到的数据进⾏⾃⼰判断,发送中断有点类似于串⼝发送中断。
RTL8188CUS驱动程序移植笔记
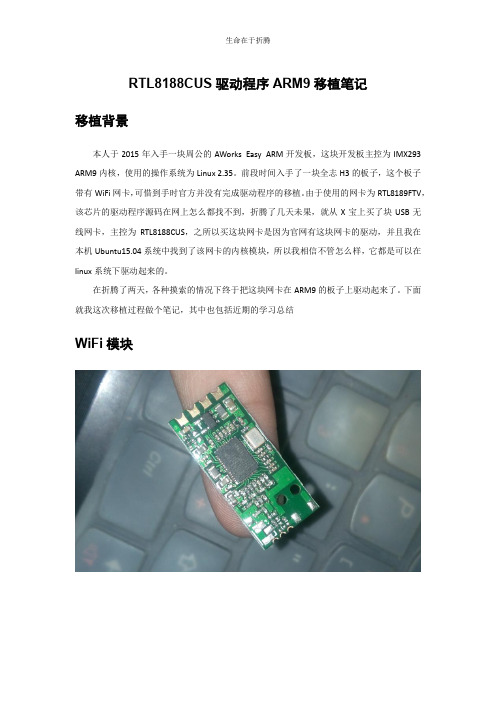
RTL8188CUS驱动程序ARM9移植笔记移植背景本人于2015年入手一块周公的AWorks Easy ARM开发板,这块开发板主控为IMX293 ARM9内核,使用的操作系统为Linux 2.35。
前段时间入手了一块全志H3的板子,这个板子带有WiFi网卡,可惜到手时官方并没有完成驱动程序的移植。
由于使用的网卡为RTL8189FTV,该芯片的驱动程序源码在网上怎么都找不到,折腾了几天未果,就从X宝上买了块USB无线网卡,主控为RTL8188CUS,之所以买这块网卡是因为官网有这块网卡的驱动,并且我在本机Ubuntu15.04系统中找到了该网卡的内核模块,所以我相信不管怎么样,它都是可以在linux系统下驱动起来的。
在折腾了两天,各种摸索的情况下终于把这块网卡在ARM9的板子上驱动起来了。
下面就我这次移植过程做个笔记,其中也包括近期的学习总结WiFi模块系统内核配置内核只能编译一次,内核模块要单独编译,否则版本字符串两者配不上就导致内核模块加载不成功。
源码的配置驱动程序测试1)通过网线连接至计算机,把计算机与开发板的IP地址设置为同一个网段计算机IP地址:192.168.1.12开发板IP地址:192.168.1.1002)开发板与计算机直接通过NFS连接并把驱动模块拷贝到开发板3)加载内核模块出现如下如下信息则加载成功rtw_macaddr_cfg MAC Address = 00:13:ef:60:06:19 bDriverStopped:1, bSurpriseRemoved:0, bup:0, hw_init_completed:0 _rtw_drv_register_netdev, MAC Address (if1) = 00:13:ef:60:06:19 usbcore: registered new interface driver rtl8192cu4)查看我们的USB无线网卡是否被系统激活执行:ifconfig发现只有一个网卡,并没有出现我们的USB无线网卡。
【驱动笔记1】第一个驱动程序

【驱动笔记1】第一个驱动程序学习各种高级外挂制作技术,马上去百度搜索"魔鬼作坊",点击第一个站进入,快速成为做挂达人。
驱动程序的开发,向来是令人感到有所畏惧的,可能很多人像我一样,看了很久却还是一头雾水,不得其门而入。
我们今天就通过一个简单的程序来使读者学会初步的驱动程序开发。
在开发Windows驱动程序之前,我们需要首先安装DDK,Win98及其以前的VxD我们就不要再考虑了;Windows2000DDK也比较老了点,很少有人使用了,微软最新的WDK貌似都不支持2000了;在本文中假设我们已经安装了Win XP DDK或2003DDK(2003会包括XP)。
驱动开发通常有两种环境,一种是使用任意文本编辑器来编写代码,然后通过编写makefile 和sources文件在WinDDK的命令行环境下使用build命令编译;另一种方法是使用各种各样的方法以图可以利用IDE的环境来搭建驱动框架,比如使用驱动向导文件或一些小工具,我经常使用的是EasySys这个小工具。
废话不多说了,假设我们已经通过EasySys生成了一个驱动框架,现在我们就向里面添加代码。
下面我们编写了一个函数,它的作用是根据形参来创建一个文件,形参中给出了将要被创建的文件完整路径。
(注意,以下程序有许多错误,具体请看后面的讲解)BOOL CreateFileTest(IN PUNICODE_STRING FileName){BOOL bRet=FALSE;HANDLE hFile=NULL;NTSTATUS status;IO_STATUS_BLOCK Io_Status_Block;//初始化文件路径OBJECT_ATTRIBUTES obj_attrib;InitializeObjectAttributes(&obj_attrib,&FileName,OBJ_CASE_INSENSITIVE| OBJ_KERNEL_HANDLE,NULL,NULL);//创建文件status= ZwCreateFile(hFile,GENERIC_ALL,NULL,Io_Status_Block,NULL,FILE_ATTRIBUTE_NORMA L,FILE_SHARE_READ,FILE_CREATE,FILE_NON_DIRECTORY_FILE| FILE_SYNCHRONOUS_IO_NONALERT,NULL,0);if(Io_Status_rmation!=FILE_CREATED){bRet=FALSE;}else{bRet=TRUE;}if(hFile){ZwClose(hFile);}return bRet;}当我们激动地编译上述程序时,却很郁闷地发现编译器报出了十几个错误,不要急,这是大多数新手都必须要跨过的一个坎儿。
英飞凌IGBT模块应用笔记
英飞凌IGBT模块应用笔记目录1 摘要2 导言2.1 数据表的状态2.2 型号命名规则3 数据表参数——IGBT3.1 集电极-发射极电压VCES3.2 总功率损耗集电极-发射极电压Ptot3.3 集电极电流IC3.4 重复性集电极峰值电流ICRM3.5 反向偏压安全运行区域RBSOA3.6 典型输出和传递特性3.6.1 IGBT器件结构以及IGBT与功率MOSFET在输出特性上的区别3.6.2 传递特性和输出特性(IGBT数据表)3.7 寄生电容3.7.1 测定电路3.7.2 栅极电荷Qg和栅极电流3.7.3 寄生导通效应3.8 开关时间3.9 短路3.10 泄漏电流ICES和IGES3.11 热特性4 数据表参数——二极管4.1 正向电流IF和正向特性4.2 重复性峰值正向电流IFRM4.3 反向恢复4.4 特热性5 数据表参数——NTC热敏电阻5.1 NTC阻值5.2 B值6 数据表参数——模块6.1 绝缘电压VISOL6.2 杂散电感LS6.3 模块电阻RCC’+EE’6.4 冷却回路6.5 安装扭矩M7 参考资料1 摘要注释:本应用笔记中给出的下列信息仅作为关于实现该器件的建议,不得被视为就该器件的任何特定功能、条件或质量作出的任何说明或保证。
本应用笔记旨在对IGBT模块的数据表中给出的参数和图表予以解释。
本应用笔记有助于要求使用IGBT模块的功率电子元件的设计者正确地使用该数据表,并为其提供背景信息。
文章来源:/jc/255.html数据表中提及的每一项参数都给出了尽可能详细地表明该模块的特性的值。
一方面,有了这些信息,设计者应当能够对不同竞争对手提供的器件进行相互比较,另一方面,根据这些信息,设计者应当足以理解该器件的局限性所在。
本文档有助于更加深刻地理解数据表中标示的参数和特性。
本文档解释了这些参数与诸如温度等条件的影响之间的相互作用。
提及动态特性试验的数据表值,如开关损耗,均与具备确定的杂散电感和栅极电阻等等值的特定试验设置有关。
广州致远电子 XGate-DPS 嵌入式模块 PROFIBUS-DP 从站通讯模块 产品应用笔记

广州致远电子有限公司修订历史销售与服务网络(一)广州周立功单片机发展有限公司地址:广州市天河北路689号光大银行大厦12楼F4 邮编:510630电话:(020)38730916 38730917 38730972 38730976 38730977 传真:(020)38730925 网址:广州专卖店地址:广州市天河区新赛格电子城203-204室 电话:(020)87578634 87569917 传真:(020)87578842南京周立功地址:南京市珠江路280号珠江大厦2006室 电话:(025)83613221 83613271 83603500 传真:(025)83613271北京周立功地址:北京市海淀区知春路113号银网中心A 座1207-1208室 (中发电子市场斜对面) 电话:(010)62536178 62536179 82628073 传真:(010)82614433重庆周立功地址:重庆市石桥铺科园一路二号大西洋国际大厦(赛格电子市场)1611室 电话:(023)68796438 68796439 传真:(023)68796439杭州周立功地址:杭州市天目山路217号江南电子大厦502室 电话:(0571) 28139611 28139612 28139613 28139615 28139616 28139618 传真:(0571) 28139621成都周立功地址:成都市一环路南二段1号数码同人港401室(磨子桥立交西北角)电话:(028)85439836 85437446 传真:(028)85437896深圳周立功地址:深圳市深南中路 2070号电子科技大厦C 座4楼D 室电话:(0755)83781788(5线) 传真:(0755)83793285武汉周立功地址:武汉市洪山区广埠屯珞瑜路158号12128室(华中电脑数码市场)电话:(027)87168497 87168297 87168397 传真:(027)87163755上海周立功地址:上海市北京东路668号科技京城东座7E 室 电话:(021)53083452 53083453 53083496 传真:(021)53083491西安办事处地址:西安市长安北路54号太平洋大厦1201室 电话:(029)87881296 83063000 87881295 传真:(029)87880865销售与服务网络(二)广州致远电子有限公司地址:广州市天河区车陂路黄洲工业区3栋2楼邮编:510660传真:(020)38601859网址:(嵌入式系统事业部)(工控网络事业部)(楼宇自动化事业部)技术支持:CAN-bus:电话:(020)22644381 22644382 22644253 邮箱:****************************iCAN及数据采集:电话:(020)28872344 22644373 邮箱:*********************MiniARM:电话:(020)28872684 28267813邮箱:******************************以太网:电话:(020)22644380 22644385邮箱:*********************************无线通讯:电话:(020) 22644386邮箱:*************************串行通讯:电话:(020)28267800 22644385 邮箱:***********************编程器:电话:(020)22644371邮箱:*************************分析仪器:电话:(020)22644375 28872624 28872345 邮箱:********************ARM嵌入式系统:电话:(020)28872347 28872377 22644383 22644384 邮箱:**********************楼宇自动化:电话:(020)22644376 22644389 28267806 邮箱:*************************************************销售:电话:(020)22644249 22644399 22644372 22644261 28872524 28872342 28872349 28872569 28872573 38601786维修:电话:(020)22644245目录1. 适用范围 (1)2.原理概述 (2)3.开发环境 (3)3.1 硬件开发环境 (3)3.2 软件开发环境 (3)4.使用DEMO开发产品 (4)4.1 DEMO模拟资源 (4)4.2 UART接口通信流程 (5)4.3 DEMO开发包 (6)4.3.1 DEMO代码包含文件列表 (6)4.3.2 主要功能函数列表 (6)4.3.3 代码使用说明 (7)4.4 修改GSD (18)5.组态网络 (24)5.1 主站平台 (24)5.2 组态系统 (24)6.免责声明 (33)1. 适用范围本文档仅在指导用户如何使用广州致远电子有限公司的嵌入式XGate-DPS模块。
RK系列以太网卡驱动学习笔记

RK系列以太⽹卡驱动学习笔记RK系列芯⽚已经内置了以太⽹控制器,所以只需要搭配⼀颗以太⽹ PHY 芯⽚就可以实现以太⽹功能!所以不管是PHY ⼚家有多少,基本的功能是都是使⽤ RK 的驱动配置基本就可以实现,就是调⽤RK 的通⽤的驱动接⼝。
10/100M以太⽹ PHY 与 MAC 之间的接⼝主要有 MII 和 RMII。
⽽10/100/1000M 以太⽹ PHY 与MAC 之间的接⼝主要有 RGMII。
在⽤的⽐较多的 RK3288 RK3399 的芯⽚上⾯都是⽀持 RMII 和 RGMII 接⼝的,也就是都可以⽀持 100 M ⽹卡,或者 1000M⽹卡⼀、RK系列以外⽹卡驱动调试1、查看以太⽹设备是否打开;Device Drivers ->[*] Network device support ->-*- PHY Device support and infrastructure-><*> Driver for Rockchip Ethernet PHYs2、修改 dts ⽂件,看你是⽀持什么接⼝的,也就是你只有 100 M ⽹卡,还是 1000M ⽹卡即可。
修改 Y:\RK3399\kernel\arch\arm64\boot\dts\rockchip\ rgf-rk3399.dts3、千兆⽹(1000M PHY)配置clkin_gmac: external-gmac-clock {compatible = "fixed-clock";clock-frequency = <125000000>; /* PHY供给GMAC的时钟⼤⼩ */clock-output-names = "clkin_gmac";#clock-cells = <0>;};&gmac {phy-supply = <&vcc_phy>; /* PHY供电 */phy-mode = "rgmii"; /* PHY接⼝ */clock_in_out = "input"; /*时钟⽅向 */snps,reset-gpio = <&gpio3 15 GPIO_ACTIVE_LOW>; /* 复位IO及有效电平 */snps,reset-active-low;snps,reset-delays-us = <0 10000 50000>;assigned-clocks = <&cru SCLK_RMII_SRC>;assigned-clock-parents = <&clkin_gmac>;pinctrl-names = "default";pinctrl-0 = <&rgmii_pins>;tx_delay = <0x28>; /* TX线上的延时值 */ rx_delay = <0x11>; /* RX线上的延时值 */ status = "okay";};查看原理图⾥供电、复位脚是否正确PMUPHY_RST然后就可以查看⽹卡是否存在rk3399:/ # ifconfig4、百兆⽹(100M PHY)配置clkin_gmac: external-gmac-clock {compatible = "fixed-clock";clock-frequency = <50000000>; //时钟 100M 使⽤ rmii 接⼝固定是50Mclock-output-names = "clkin_gmac";#clock-cells = <0>;};&gmac {phy-supply = <&vcc_phy>;phy-mode = "rmii"; // 说明接⼝是什么 PHYclock_in_out = "output"; // 是 output 的时候,就由 RK芯⽚提供 50M,1000M 的是 inputsnps,reset-gpio = <&gpio3 15 GPIO_ACTIVE_LOW>; // 硬件接⼝看原理图 snps,reset-active-low;snps,reset-delays-us = <0 10000 50000>;assigned-clocks = <&cru SCLK_RMII_SRC>;assigned-clock-parents = <&clkin_gmac>;pinctrl-names = "default";pinctrl-0 = <&rgmii_pins>;。
mptsas驱动阅读笔记
1. MPTSAS概述本文主要对1000系列软RAID产品中所涉及的LSISAS1068E SAS控制器驱动部分作了分析。
限于项目需求与时间,本文重点分析了MPTSAS驱动的结构、SAS 控制器初始化过程、以及磁盘热插拔事件的响应过程。
LSISAS1068E是一个基于Fusion-MPT架构的SAS控制器。
Fusion-MPT技术由LSI Logic开发,旨在为客户提供更为容易的实现SCSI和Fibre Channel的解决方案。
这种开放式的Fusion-MPT架构具有高I/O性能,同时还能降低产品验证的时间和推向市场的时间。
LSI Fusion-MPT基于行业标准的ARM处理器技术,支持Ultra320 SCSI,Fibre Channel,SAS接口,并可以对将来出现的其他接口扩展。
Fusion-MPT技术主要包括Fusion-MPT固件,SAS、U320 SCSI、Fibre Channel 硬核,和操作系统级的驱动程序等部分。
如图1.1所示,Fusion-MPT架构中使用统一的固件及驱动来支持所有基于Fusion-MPT技术的I/O控制器。
图1.1 Fusion-MPT 架构如图1.2所示,Fusion-MPT架构可分为操作系统层和硬件层两部分,而从驱动程序设计的角度,又可进一步将其分为驱动、固件和硬件三个功能层次。
图1.2 Fusion-MPT架构框图Fusion-MPT在硬件层之上构建独有的固件层,不同的固件为上层驱动程序提供对SCSI或FC的支持,以及高级的集成RAID等功能。
固件层有效地将驱动程序同硬件隔离,对上层驱动程序提供统一的MPI ( Message Passing Interface )接口,使同一驱动程序可以应用于不同的底层硬件系统,有助于加速应用开发。
驱动层对上层操作系统提供功能函数接口,通过MPI访问固件层,实现操作系统对硬件的访问,并且按照通信协议实现相关的帧封装和拆解。
Windows驱动开发详解笔记,注册表操作

Windows驱动开发详解笔记,注册表操作注册表项相当于⽂件夹,注册表⼦项⼦⽂件夹(类似⽬录)。
1、创建关闭ZwCreateKey⽰例代码VOID CreateRegTest(){//创建或打开某注册表项⽬UNICODE_STRING RegUnicodeString;HANDLE hRegister;//初始化UNICODE_STRING字符串RtlInitUnicodeString( &RegUnicodeString,MY_REG_SOFTWARE_KEY_NAME);OBJECT_ATTRIBUTES objectAttributes;//初始化objectAttributesInitializeObjectAttributes(&objectAttributes,&RegUnicodeString,OBJ_CASE_INSENSITIVE,//对⼤⼩写敏感NULL,NULL );ULONG ulResult;//创建或带开注册表项⽬NTSTATUS ntStatus = ZwCreateKey( &hRegister,KEY_ALL_ACCESS,&objectAttributes,0,NULL,REG_OPTION_NON_VOLATILE,&ulResult);if (NT_SUCCESS(ntStatus)){//判断是被新创建,还是已经被创建if(ulResult==REG_CREATED_NEW_KEY){KdPrint(("The register item is created\n"));}else if(ulResult==REG_OPENED_EXISTING_KEY){KdPrint(("The register item has been created,and now is opened\n"));}}//(2)创建或打开某注册表项⽬的⼦UNICODE_STRING subRegUnicodeString;HANDLE hSubRegister;//初始化UNICODE_STRING字符串RtlInitUnicodeString( &subRegUnicodeString,L"SubItem");OBJECT_ATTRIBUTES subObjectAttributes;//初始化subObjectAttributesInitializeObjectAttributes(&subObjectAttributes,&subRegUnicodeString,OBJ_CASE_INSENSITIVE,//对⼤⼩写敏感hRegister,//创建或带开注册表项⽬ntStatus = ZwCreateKey( &hSubRegister,KEY_ALL_ACCESS,&subObjectAttributes,0,NULL,REG_OPTION_NON_VOLATILE,&ulResult);if (NT_SUCCESS(ntStatus)){//判断是被新创建,还是已经被创建if(ulResult==REG_CREATED_NEW_KEY){KdPrint(("The sub register item is created\n"));}else if(ulResult==REG_OPENED_EXISTING_KEY){KdPrint(("The sub register item has been created,and now is opened\n")); }}//关闭注册表句柄ZwClose(hRegister);ZwClose(hSubRegister);}2、打开ZwOpenKey3、添加、修改、注册表键值ZwSetValueKey⽰例代码VOID SetRegTest(){UNICODE_STRING RegUnicodeString;HANDLE hRegister;//初始化UNICODE_STRING字符串RtlInitUnicodeString( &RegUnicodeString,MY_REG_SOFTWARE_KEY_NAME);OBJECT_ATTRIBUTES objectAttributes;//初始化objectAttributesInitializeObjectAttributes(&objectAttributes,&RegUnicodeString,OBJ_CASE_INSENSITIVE,//对⼤⼩写敏感NULL,NULL );//打开注册表NTSTATUS ntStatus = ZwOpenKey( &hRegister,KEY_ALL_ACCESS,&objectAttributes);if (NT_SUCCESS(ntStatus)){KdPrint(("Open register successfully\n"));}UNICODE_STRING ValueName;//初始化ValueName//设置REG_DWORD⼦键ULONG ulValue = 1000;ZwSetValueKey(hRegister,&ValueName,0,REG_DWORD,&ulValue,sizeof(ulValue));//初始化ValueNameRtlInitUnicodeString( &ValueName, L"REG_SZ value");WCHAR* strValue = L"hello world";//设置REG_SZ⼦键ZwSetValueKey(hRegister,&ValueName,0,REG_SZ,strValue,wcslen(strValue)*2+2);//初始化ValueNameRtlInitUnicodeString( &ValueName, L"REG_BINARY value"); UCHAR buffer[10];RtlFillMemory(buffer,sizeof(buffer),0xFF);//设置REG_MULTI_SZ⼦键ZwSetValueKey(hRegister,&ValueName,0,REG_BINARY,buffer,sizeof(buffer));//关闭注册表句柄ZwClose(hRegister);}4、查询ZwQueryValueKey来查询注册表项。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
驱动模块装载全纪录模块驱动源代码demo.c如下:/************************************************************************** **my first linux driver************************************************************************** *///#ifndef_KERNEL_//#define_KERNEL_/*缂..杩..??///#endif#ifdef MODULE/*浠ユā?..寮.?璇./#include<linux/module.h>#ifdef CONFIG_DEVFS_FS#include<linux/devfs_fs_kernel.h>/*璁惧??.欢绯荤?澶存.浠?/#endif#include<linux/init.h>/*初始化相关头文件*/#include<linux/kernel.h>/*与printk()等函数有关的头文件*/#include<linux/slab.h>/*与kmalloc()等函数有关的头文件*/#include<linux/fs.h>/*与文件系统有关的头文件*/#include<linux/errno.h>/*错误代码处理头文件error codes*/#include<linux/types.h>/*数据类型头文件size_t*/#include<linux/proc_fs.h>/*与进程调度相关的头文件*/#include<linux/fcntl.h>/*O_ACCMODE*/#include<linux/poll.h>/*COPY_TO_USER*/#include<asm/system.h>/*cli(),*_flag*/#define DEVICE_NAME"ZJD demo"/*该驱动的设备名*/#define DEMORAW_MINOR1#define DEMO_Devfs_path"demo/0"/*驱动目录*///#define demo_MAJOR254/*主设备号*///#define demo_MINOR0/*次设备号*/static int demoMajor=0;static int MAX_BUF_LEN=1024;/*瀹.?涓缂..?烘.澶ч.搴?/static char drv_buf[1024];/*瀹.?涓缂..??/static int WRI_LENGTH=0;/************************************************************************名称:static void do_write()*功能:逆序排列缓冲区数据*入口参数:无*出口参数:无**********************************************************************/static void do_write(void){int i;int len=WRI_LENGTH;int mid=len>>1;char tmp;for(i=0;i<mid;i++,len--){tmp=drv_buf[len-1];drv_buf[len-1]=drv_buf[i];drv_buf[i]=tmp;}}/************************************************************************名称:demo_write()*功能:对应用户空间的write系统调用,从用户空间拷贝给定长度缓冲区数据到内核空间*入口参数:*filp操作设备文件的ID,*buffer对应用户空间的缓冲区的起始地址,count用户空间数据缓冲区长度*出口参数:返回用户空间数据缓冲区长度**********************************************************************/static ssize_t demo_write(struct file*filp,const char__user*buffer,size_t count,loff_t*ppos){if(count>MAX_BUF_LEN)count=MAX_BUF_LEN;copy_from_user(drv_buf,buffer,count);/**/WRI_LENGTH=count;//printk("user write data to driver\n");do_write();return count;}/************************************************************************名称:demo_read()*功能:对应用户空间的read系统调用,从内核空间拷贝给定长度缓冲区数据到用户空间*入口参数:*filp操作设备文件的ID,*buffer对应用户空间的缓冲区的起始地址,count用户空间数据缓冲区长度,*ppos用户在文件中进行存储操作的位置*出口参数:返回用户空间数据缓冲区长度**********************************************************************/static ssize_t demo_read(struct file*filp,char__user*buffer,size_t count,loff_t*ppos){if(count>MAX_BUF_LEN)count=MAX_BUF_LEN;icopy_to_user(buffer,drv_buf,count);/**///WRI_LENGTH=count;//printk("user read data from driver\n");//do_write();return count;}/************************************************************************名称:demo_ioctl()*功能:对应用户空间的ioctl系统调用,对用户空间传递过来的命令进行swith判断,并进行相应处理,本函数只对用户空间传递过来的1,2做简单的处理,打印一条信息,该信息可以在var/log/messages 文件尾查阅到*入口参数:*filp操作设备文件的ID,cmd对应用户空间的cmd,arg对应用户空间传递过来的参数列表*出口参数:正确返回0,错误命令返回default的提示内容**********************************************************************/static int demo_ioctl(struct inode*inode,struct file*filp,unsigned int cmd,unsigned long arg){switch(cmd){case1:printk("running command1\n");break;case2:printk("running command2\n");break;default:printk("error cmd number\n");break;}return0;}/*********************************************************************** *名称:static void demo_open()*功能:设备文件打开函数,对应用户空间open系统调用,*入口参数:设备文件节点*出口参数:无**********************************************************************/ static int demo_open(struct inode*inode,struct file*filp){//MOD_INC_USE_COUNT;//sprintf(drv_buf,"device open success!\n");printk("device open success!\n");return0;}/*********************************************************************** *名称:static void demo_release()*功能:设备文件释放函数,对应用户空间close系统调用,*入口参数:设备文件节点*出口参数:无**********************************************************************/ static int demo_release(struct inode*inode,struct file*filp){//MOD_DEC_USE_COUNT;printk("device release!\n");return0;}/*********************************************************************** *名称:demo_fops设备文件结构*功能:设备驱动文件结构体**********************************************************************/static struct file_operations demo_fops={owner:THIS_MODULE,write:demo_write,read:demo_read,ioctl:demo_ioctl,open:demo_open,release:demo_release,};/************************************************************************名称:static void demo_init()*功能:设备注册函数,通过devfs_register向设备文件系统/dev目录下注册设备,通过register_chrdev 向内核字符设备链表注册该字符设备*入口参数:无*出口参数:无**********************************************************************/static int__init demo_init(void){int ret;ret=register_chrdev(0,DEVICE_NAME,&demo_fops);if(ret<0){printk(DEVICE_NAME"can't get major number\n");return ret;}demoMajor=ret;#ifdef CONFIG_DEVFS_FSdevfs_mk_cdev(MKDEV(demoMajor,DEMORAW_MINOR),S_IFCHR|S_IRUSR|S_IWUSR|S_IRGRP,DEMO_Devfs_path);#endifreturn0;}/************************************************************************名称:static void demo_exit()*功能:设备注销函数,通过unregister_chrdev向内核字符设备链表注销该字符设备*入口参数:无*出口参数:无**********************************************************************/#ifdef MODULEvoid__exit demo_exit(void){#ifdef CONFIG_DEVFS_FSdevfs_remove(DEMO_Devfs_path);#endifunregister_chrdev(demoMajor,DEVICE_NAME);}module_exit(demo_exit);#endif/***********************************************************************/ module_init(demo_init);MODULE_LICENSE("DUAL BSD/GPL");#endif//MODULE用户测试程序test_demo.c代码如下:#include<stdio.h>#include<stdlib.h>#include<fcntl.h>#include<unistd.h>#include<sys/ioctl.h>void showbuf(char*buf);int MAX_LEN=32;int main(){int fd;int i;char buf[255];for(i=0;i<MAX_LEN;i++){buf[i]=i;}fd=open("/dev/demo/0",O_RDWR);if(fd<0){printf("***********DEMO device open fail**********\n");return(-1);}printf("write%d bytes data to to/dev/mydemo/0\n",MAX_LEN);showbuf(buf);write(fd,buf,MAX_LEN);printf("read%d bytes from/dev/mydemo/0\n",MAX_LEN);read(fd,buf,MAX_LEN);showbuf(buf);close(fd);return0;}void showbuf(char*buf){int i,j=0;for(i=0;i<MAX_LEN;i++){if(i%4==0){printf("\n%4d:",j++);}printf("%4d",buf[i]);}printf("\n***********************zjd**********************************\n"); }Makefile代码如下:TARGET=test_demo#CROSS_COMPILE=arm-linux-CC=$(CROSS_COMPILE)gccSTRIP=$(CROSS_COMPILE)strip#CFLAGS=-O2ifeq($(KERNELRELEASE),)#KERNELDIR?=/up-Star2410/kernel/linux-2.6.24.4/#ARM驱动.KERNELDIR?=/usr/src/kernels/2.6.9-42.EL-smp-i686#PC驱动路径.PWD:=$(shell pwd)all:$(TARGET)modules$(TARGET):$(CC)-o$(TARGET)$(TARGET).cmodules:$(MAKE)-C$(KERNELDIR)M=$(PWD)modulesmodules_install:$(MAKE)-C$(KERNELDIR)M=$(PWD)modules_installclean:rm-rf*.o*~core.depend.*.cmd*.ko*.mod.c.tmp_versions$(TARGET) .PHONY:modules modules_install cleanelseobj-m:demo.oendif生成模块:出现,找不到头文件的错误,如下仔细研究上面的编译及出错纪录,发现编译模块,把text_demo.c也认为是模块了,一定是Makefile写错了,果然在obj-m:后面有test_demo.o,删了即不出现错误。