[理学]第4章:S7-200功能指令及编程
PLC应用技术-S7-200的基本指令
4.1 位操作类指令
3. 触点并联指令:O(Or)/ON(Or not) O:或操作,表示并联连接一个常开触点。 ON:或非操作,表示并联连接一个常闭触点。
网络1 LD I0.0 O I0.1 ON M0.0 = Q0.0
网络2 LDN Q0.0 A I0.2 O M0.1 AN I0.3 O M0.2 = M0.1
增减计数程序及时序
4.1 位操作类指令
五、比较指令
• 1. 字节比较 LDB、AB、OB • 2. 整数比较 LDW、AW、OW • 3. 双字整数比较 LDD 、AD 、OD • 4、实数比较 LDR AR OR
比较运算符 : == 等于 、〈 小于、〉大于、〈= 小于等 于、〉= 大于等于、〈〉不等于
OLD
LDN I0.4 A I0.5 OLD = Q0.0
4.1 位操作类指令
注意输出线圈不能串联
M0.0 T37
Q0.0 Q0.1
()()
4.1 位操作类指令
实验题:起动保持停止电路(起保停电路)
1
I0.0 I0.1 Q0.0
LD I0.0 起动 I0.0
0
( ) O Q0.0 停止 I0.1
难点内容:
表功能指令
4.1 位操作类指令
• 1.逻辑取(装载)指令 LD/LDN • 2. 触点串联指令 A/AN • 3. 触点并联指令 O/ON • 4. 电路块的串联指令 ALD • 5. 电路块的并联指令 OLD • 6. 置位/复位指令 S/R • 7. 边沿触发指令 EU/ED
4.1 位操作类指令
4.1 位操作类指令
控制要求: • 一自动仓库存放某种货物,最多6000箱
,需对所存的货物进出计数。货物多于 1000箱,灯L1亮;货物多于5000箱,灯 L2亮。 • 其中,L1和L2分别受Q0.0和Q0.1控制, 数 值 1000 和 5000 分 别 存 储 在 VW20 和 VW30字存储单元中。
西门子s7-200PLC基本指令

15:33
14
15:33
15
2、保持型接通延时定器(TONR)
Txx IN TONR PT
•在输入(IN)收到能流时,从当前值开始计时; •当当前值达到预置值(PT)时,定时器位被置1; •当输入能流断开时停止计时,定时器位、当前值保持不变; •必须用复位指令才能清除定时器位和当前值; •定时器号(Txx)决定了定时器的分辨率。
???
② 置位线圈指令
(S) xxx
???位代表位起始地址
当指令收到能流时,则???指定位开始的XXX个位被置1;
当指令没收到能流时,则???指定的位状态不变 。
???
③ 复位线圈指令 (xRxx) ???位代表位起始地址
当指令收到能流时,则???指定位开始的XXX个位被置0;
当指令没收到能流时,则???指定的位状态不变 。
1. 基本逻辑指令 2. 堆栈操作指令* 3. 定时器指令 4. 计数器指令 5. 比较指令
15ห้องสมุดไป่ตู้33
2
一、基本逻辑指令
1、触点指令
???
① 检查闭指令 其中???位代表位地址 当???指定地址的数据为1时, 指令结果接通能流; 否则,指令结果断开能流。
???
② 检查开指令 其中???位代表位地址 当???指定地址的数据为0时, 指令结果接通能流; 否则,指令结果断开能流。
15:33
21
2、减计数器减计数指令(CTD)
Cxx CD CTD LD PV
从当前计数值开始,在每一个(CD)输入状态 的低到高时递减计数。
•当CXX的当前值等于0时,计数器位CXX置位。
西门子S7-200指令
LN IN,OUT
对一个32位实数(IN)取自然对数,得到32位实数结果(OUT)
EXP IN,OUT
对一个32位实数(IN)取以e为底数的指数,得到32位实数结果(OUT)
SIN IN,OUT
分别对一个32位实数弧度值(IN)取正弦、余弦、正切,得到32位实数结果(OUT)
COS IN,OUT
S7-200PLC数据传送指令
表4-22数据传送指令
名称
指令格式
(语句表)
功能
操作数
单一传送指令
MOVB IN,OUT
将IN的内容拷贝到OUT中
IN和OUT的数据类型应相同,可分别为字,字节,双字,实数
IN,OUT:VB,IB,QB,MB,SB,SMB,LB,AC,*VD,*AC,*LD
IN还可以是常数
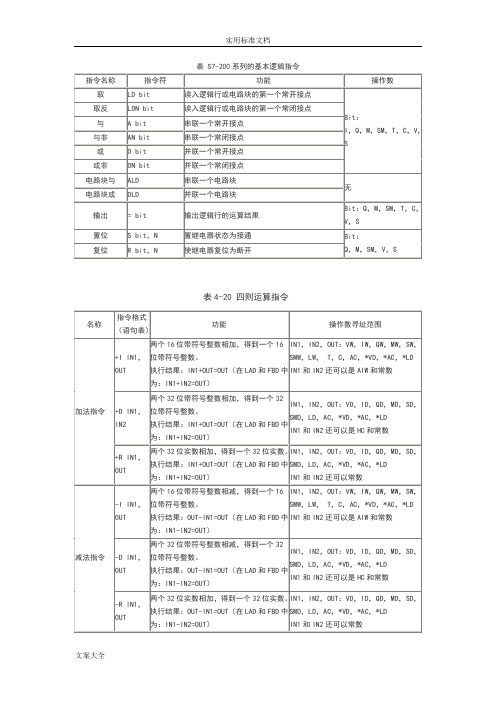
两个16位带符号整数相乘,得到一个32位带符号整数。
执行结果:IN1*OUT=OUT(在LAD和FBD中为:IN1*IN2=OUT)
IN1,IN2:VW,IW,QW,MW,SW,SMW,LW,AIW,T,C,AC,*VD,*AC,*LD和常数
OUT:VD,ID,QD,MD,SD,SMD,LD,AC,*VD,*AC,*LD
RRB OUT,N
将字节OUT循环右移N位,从最右边移出的位送到OUT的最左位
RLB OUT,N
将字节OUT循环左移N位,从最左边移出的位送到OUT的最右位
字移位指令
BMW IN,OUT,N
将从IN开始的连续N个字数据拷贝到从OUT开始的数据块
N的有效范围是1~255
IN,OUT:VW,IW,QW,MW,SW,SMW,LW,T,C,*VD,*AC,*LD
IN还可以是AIW
S7-200 PLC功能指令

4.4 S7-200 PLC的功能指令PLC的功能指令(Functional Instruction)或称应用指令,是指令系统中满足特殊控制要求的那些指令。
在本节中主要介绍数据处理指令、数据运算指令、转换指令、表功能指令、程序控制类指令、中断指令、高速计数器指令、高速脉冲指令等。
1.指令格式指令的梯形图格式主要以指令盒的形式表示,如图4-49所示:图4-49 指令的梯形图格式指令盒的顶部为该指令的标题,如MOV_B,一般由两部分组成,前面部分为指令的助记符,后面部分为参与运算的数据类型,B表示字节,W表示字,DW表示双字、R表示实数、I表示整数、DI表示双整数。
指令的指令表格式也分为两部分,如字节传送指令的指令表格式为:MOVB IN,OUT。
前面部分为指令的助记符,后面部分为指令的操作数,其中“IN”为源操作数,“OUT”为目的操作数。
为了节省篇幅,对每条功能指令的操作数的内容即数据类型做如下约定:字节型:VB、IB、QB、MB、SB、SMB、LB、AC、*VD、*LD、*AC和常数。
字型及INT型:VW、IW、QW、MW、SW、SMW、LW、AC、T、C、*VD、*LD、*AC和常数。
双字型及DINT型:VD、ID、QD、MD、SD、SMD、LD、AC、*VD、*LD、*AC和常数。
2.指令的执行条作和运行情况指令梯形图格式中的“EN”端是允许输入端,为指令的执行条件,只要有“能流流入EN 端,指令就执行。
要注意的是:只要条件存在,该指令会在每个扫描周期执行一次,如果希望只执行一次,要在“EN”前加一条跳变指令。
在语句表(STL)程序中没有EN允许输入端,允许执行STL语句的条件是栈顶的值必须是“1”。
4.ENO状态(用于指令的级联)指令盒的右边设有“ENO”使能输出,若EN端有“能流”且指令被准确无误地执行了,则ENO端会有“能流”输出,传到下一个程序单元,如果指令运行出错,ENO端状态为0。
第4章 S7-200的基本指令系统及编程
KM1
(Q0.1)
KM2
(Q0.2)
KA
(M0.0)
原理图
(a) 梯形图
(b) 语句表
图3-2
电气原理图
图3-3
输入输出指令编程使用举例
绪论 EXIT
4
输入输出指令使用说明:
LD、LDN、=指令的操作数为:I、Q、M、SM、T、C、V、S、L(位)。
LD、LDN不止是用于网络块逻辑计算开始时与母线相连的常开和常闭 触点,在分支电路块的开始也要使用LD、LDN指令。
绪论 EXIT
17
4.1.8 立即指令
指令格式:LAD及STL格式如图所示
SI bit, N (a) 立即置位 RI bit, N (b) 立即复位
图3-18 立即置位/复位指令
立即置位/复位指令使用说明: 1. N的范围为:1~125 2. N的操作数同S/R指令 3. 程序执行立即读输入指令时,只是立即读取物理输 入点的值,而不改变输入映像寄存器的值。 4. 程序执行立即输出指令(=I),是将栈顶值立即输出 到物理点,同时刷新输出映像寄存器的内容。
绪论 EXIT
23
4)装载堆栈指令 指令格式:LDS n n的范围:0~8的整数 功能: 复制堆栈中的第n个值到栈顶。 说明: 原堆栈的值下移一位。
绪论 EXIT
24
2.逻辑堆栈指令应用
LD LPS LD O ALD = LRD LD A LD A OLD ALD = LPP A = LD O ALD = I0.0 I0.1 Q0.0 Q0.0 M0.0 M0.1 M0.2 M0.3
绪论 EXIT 16
例7 图为边沿脉冲指令的应用
LD EU = I0.0 M0.0
s7-200PLC编程及应用第4章资料

4.2.3 数据转换指令
1.标准转换指令 除了解码、编码指令之外的10条指令属于标准转换指令。输入参数IN指定的 数据转换后保存到输出参数OUT指定的地址。BCD码与整数相互转换的指令中, 整数的有效范围为0~9999。 如果转换后的数值超出输出的允许范围,溢出标志位SM1.1被置为ON。 2.段码指令 七段显示器的D0~D6段分别对应于段码指令输出字节的第0位~第6位,某 段应亮时输出字节中对应的位为1,反之为0。段码指令很少使用。
4.1.2 S7-200 的指令规约
1.使能输入与使能输出 使能输入端EN有能流流入方框指令时,指令才能被执行。 EN输入端有能流且指令执行时无错误,则使能输出ENO将能流传递给下一 个方框指令或线圈。 语句表用 AENO 指令来产生与方框指令的 ENO 相同的效果。删除AENO 指 令后,方框指令将由串联变为并联。
4.2.2 移位与循环移位指令
移位位数N的数据类型为BYTE。 1.右移位和左移位指令 移位指令将输入IN中的数各位的值向右或向左移动N位后,送给输出OUT指 定的地址。移位指令对移出位自动补0,有符号的字和双字的符号位也被移位。 如果移位次数非0,“溢出”标志位SM1.1保存最后一次被移出的位的值。
2.梯形图中的指令 条件输入指令必须通过触点电路连接到左侧母线上。不需要条件的指令必 须直接连接在左侧母线上。 3.能流指示器 必须解决开路问题,网络才能成功编译。ENO端的可选能流指示器表示可
将其他梯形图元件附加到该位置。它不影响编译。
4.2 数据处理指令 4.2.1 比较指令与数据传送指令
1.字节、整数、双整数和实数比较指令 比较触点中间的 B、I、D、R、S分别表示无符号字节、有符号整数、有 符号双整数、有符号实数和字符串比较。满足比较关系式给出的条件时, 比较指令对应的触点接通。字符串比较指令的比较条件“x”只有==和<>。 整数和双整数比较指令比较两个有符号数。IN1在触点的上面,IN2在触 点下面。
第4章 S7-200 PLC的编程指令(赖指南)
应用举例:含有立即指令的应用程序,如图 4-8 所示,图4-9 是该程
序对应的时序图。
LD I0.0 //装入常开触点
=
=I SI
Q0.0
Q0.1 Q0.2, 1
//输出位,非立即
//立即输出位 //从Q0.2开始的1个位被立即置1
LDI
=
I0.0
Q0.3
//立即输入触点指令
//输出位,非立即
图4-8 立即指令程序
置位即置1,复位即置0。置位和复位指令可以将位存储 区的某一位开始的一个或多个(最多可达255个)同类存储
器位置 1 或置 0 。这两条指令在使用时需指明三点:操作性
质、开始位和位的数量。各操作数类型及范围如表4-1所示。
1. S:置位指令
将位存储区的指定位(位bit )开始的 N 个同类存储器 位置位。 用法:S bit, N 例:S Q0.0, 1
注意:bit只能是Q类型。
(3)SI:立即置位指令 用立即置位指令访问输出点时,从指令所指出的位 ( bit )开始的 N 个(最多为 128 个)物理输出点被立即置 位,同时,相应的输出映像寄存器的内容也被刷新。 指令格式:SI bit, N 例:SI Q0.0, 2
(4)RI:立即复位指令
用立即复位指令访问输出点时,从指令所指出的位 ( bit )开始的 N 个(最多为 128 个)物理输出点被立即复 位,同时,相应的输出映像寄存器的内容也被刷新。 用法:RI bit, N 例:RI Q0.0, 1
TONR T2, +10
LD TOF
I0.0 T36, +3
//使能输入 //断电延时定时器,延时时
//间为30ms
输出刷新
西门子S7-200基本指令

图4.3
标准触点FBD例 例 标准触点
第4章 基本指令
(4)RI,立即复位指令 ) , 用立即复位指令访问输出点时, 用立即复位指令访问输出点时,从指令所指出的 位(bit)开始的 个(最多为 )开始的N个 最多为128个)物理输出点 个 被立即复位,同时, 被立即复位,同时,相应的输出映像寄存器的内 容也被刷新。 容也被刷新。 用法: RI bit, N 用法: 例: RI Q0.0, 1 应用举例: 应用举例: 为立即指令应用中的一段程序, 图4.9为立即指令应用中的一段程序, 图4.10是程 为立即指令应用中的一段程序 是程 序对应的时序图。 序对应的时序图。
I0.0 I0.1 I0.2
// // //
//取非,即输出反相 Q0.3 //
标准触点LAD和STL例 和 标准触点 例
第4章 基本指令
2. 正负跳变指令
本程序对应的 功能框图如图 4.3 所 示 。 在 功 能框图中,常 闭触点的装入 和串并联用指 令盒的对应输 入信号端加圆 圈来表示。 圈来表示。 程序执行的时 序 图 如 图 4.4 所 示。
返回本节
第4章 基本指令
4.1.2 基本逻辑指令
基本逻辑指令在语句表语言中是指对位存储单元 的简单逻辑运算, 的简单逻辑运算,在梯形图中是指对触点的简单 连接和对标准线圈的输出。 连接和对标准线圈的输出。 一般来说, 一般来说,语句表语言更适合于熟悉可编程序控 制器和逻辑编程方面有经验的编程人员。 制器和逻辑编程方面有经验的编程人员。用这种 语言可以编写出用梯形图或功能框图无法实现的 程序。 程序。选择语句表时进行位运算要考虑主机的内 部存储结构。 部存储结构。
可编程序控制器第四章1s7-200的部分功能指令

L
~220V N
可编程控制器原理及应用
大
包
小
装
包
计停启
装
数止动
选限脉按按
择位冲钮钮
SB3 SB2 SB1
N L L+
I0.4 I0.3 I0.2 I0.1 I0.0
1L
KH
Q0.4 Q0.3 Q02 Q0.1 Q0.0
包送 装料 带电 电动 动机 机
17
可编程控制器原理及应用
输入/输出端口分配表
38
可编程控制器原理及应用 传送字节立即写指令的语句表表示
操作码:BIW
构
成 源操作数起始地址IN 目标操作数起始地址OUT
BIW IN, OUT
39
可编程控制器原理及应用
传送字节立即写指令的原理
MOV_BIW EN ENO
当EN=1时
IN OUT
原 指令将IN输入端指定字节地址的内容写入输出端 理 OUT指定字节地址的物理输出点(QB)
址的存储单元中去
操作数数据类型为字节型(BYTE)
37
可编程控制器原理及应用
传送字节立即读(BIR)、写(BIW)指令 传送字节立即写指令的梯形图表示
指令标识符MOV_BIW
MOV_BIW EN ENO
IN OUT
使能输入端EN
构
成 使能输出端ENO 源操作数地址输入端IN
目的操作数地址输出端OUT
4
可编程控制器原理及应用
4.1
传送指令
数据传送指令 数据块传送指令 交换字节指令 传送字节立即读、写指令
5
可编程控制器原理及应用
数 字节传送指令MOVB
据 传
S7-200 第4章 可编程序控制器指令1

注意:
1.定时时间=定时器的预设值(PT)*定时器的分辨 率。 2.一个定时器智能表现一种功能,不能把一个定时器 同 时 用 作 TOF 和 TON , 或 TONR , 例 如 , 不 能 既 有
TON T32又有TOF T32或TONR。同一个序号的定时器
也不能重复出现。
§ 4.3.2 计数器指令
4.4.1 传送指令
1.字节、字、双字、实数的传送指令 ·MOV为传送指令符号, 表示数据类型。
MOV _ EN ENO IN OUT
·数据类型有:字节(B)、字(W)、双字(DW)、实数 (R)。 · EN为使能端,即当EN前面的逻辑条件满足时,才能进行 数据传送。 · IN是所要传送的数据输入端。OUT是数据传输的输出端。
•在CD端,每来一个上升沿到,计数器当前值减1,当当前
值等于0时,计数器状态位被置1,计数器停止计数。 •如CD端仍有上升沿到来,当前值仍保持为0,状态位不变。 •当复位端(LD)置位时,计数器被复位,即减计数器被 装入预设值(PV),状态位清零。
减计数举例
3.加/减计数器指令(CTUD)
•兼有加计、减计数器双重功能,CU端加计数, CD端 减计数。 •当当前值大于或等于预置计数值(PV)时,计数器状 态位被置位;当前计数值小于预设值(PV)时,计数 器状态位被复位。 •当复位端(R)被接通时,计数器复位。
后,则使输出短时接通,接通时间为一个扫描周期。
2.负跳变指令
负跳变指令梯形图:┥N┝
当负跳变触点检测到又一次负跳变(从on到off)之
后,则使输出短时接通,接通时间为一个扫描周期。
正、负跳变指令举例
4.2.5 置位和复位指令 1.置位(置1)指令
置位指令(置1)是从bit指定的地址位开始的N个点 被置位,直至复位指令到来才能复位。被置位指令N的 范围是1-255。
S7-200 PLC的功能指令

5. 高速计数器设置过程 为更好地理解和使用高速计数器,下面给出高速计数器的一般设置过 程。 (1)使用初始化脉冲触点SM0.1调用高速计数器初始化操作子程序。(这个 结构可以使系统在后续的扫描过程中不再调用这个子程序,从而减少了 扫描时间,且程序更加结构化)。 (2)在初始化子程序中,对相应高速计数器的控制字节写入希望的控制字。 如要使用HSC1,则对SMB47写入16#F8(2#11111000),表示高速计数器运 行,允许写入新的当前值,允许写入新的预置值,可以改变计数器方向, 置计数器的计数方向为增,置启动和复位输入为高电平有效
返回目录
1.高速计数器指令 高速计数器指令包含定义高速计数器指令(HDEF)、高速计数器指 令(HSC)。HDEF、HSC指令的梯形图及指令表格式如下所示。 S7-200系列PLC中有6个高速计 HDEF HSC,MODE 数器,由HSCn来表示高速计数 器的地址,n的取值范围为0~5。 HSCn还表示高速计数器的当前 STL指令 值(是一个只读的32位双字),可 使用数据传输指令随时读出计数 当前值。不同的CPU模块中可使 用的高速计数器是不同的, HSC N CPU221、CPU222可以使HSC0、 HSC3、HSC4和HSC5; STL指令 CPU224和CPU226可以使用 HSC0~HSC5。
状态位功能 不用 当前计数方向状态位, 0(减计数);1(增计数) 当前值等于预置值状 态位;0(不等);1(相等) 当前值大于预置值状 态位;0(小于等 于);1(大于)
指出了当前计数方向 当前值与预置值是否相等
SM36.6 SM36.7
当前值是否大于预置值的状态
可以通过监视高速计数器的状态位产生相应中断,完成重要操作。 返回目录
控制字节的功能如下表所示
S7-200PLC的功能指令和运算指令

SMB76
状态字节,在PTO方式下,跟踪 脉冲串的输出状态
SMB67
SMB77
控制字节,控制PTO/PWM脉 冲输出的基本功能
PTO/PWM的周期值,字型, SMW68 SMW78 范围:2~65535,16位无符号
数
Q0.0的 Q0.1的 寄存器 寄存器
名称及功能描述
SMW70
SMW80
PWM的脉宽值,字型,范围0 ~65535,16位无符号数
● 1个 16位的脉宽值(SMW70、 SMW80)
● 1个 32位的脉冲数量(SMD72、 SMD82) 对于多段 PTO,还有
● 1个 8位的段字节(SMW166、
这些参数存放在系统指定的特殊标志寄存器中
表7-17 相关寄存器功能表
Q0.0的 Q0.1的 寄存器 寄存器
名称及功能描述
SMB66
S7-200PLC 的复杂功能指令
§7-12 高速脉冲输出指令
1. 高速脉冲输出的几个概念 1) 高速脉冲输出的形式
● 高速脉冲串输出 PTO :
( Pulse Train Output )
输出指定数量,占空比为50% 的方波脉冲串 。
● 宽度可调脉冲输出 PWM :
( Pulse Width Modulation )
●单段PTO:定义一个脉冲串,输出一个脉冲 串 (特性参数通过特殊寄存器分别定义) 。
●多段PTO:集中定义多个脉冲串,按顺序输 出多个脉冲串(特性参数通过包络表集中定义) 。
▲单段PTO 实现的方法
用指定的特殊标志寄存器定义脉冲串特性参 数(每次定义一个脉冲串)。一个脉冲串输出 完成后,产生中断。在中断服务程序中再为下 一个脉冲串更新参数,输出下一个脉冲串。
第4章 西门子S7-200系列PLC功能指令1

在编程软件的“PLC”菜单项中选择“当 日时钟时间”。
在弹出的“当日时钟时间”对话框中进行设定。
实验五跟踪设备运行时间
二、控制要求 设计控制程序,累计一台设备的运行时间。 实验装置使用主机模块面板、基本指令编程练习 面板(图3)及LED数码显示控制面板。具体控制要求 如下: 1.设备运行时,提供一个24V信号(即给PLC输入 一个信号),PLC就开始累计设备运行时间。设备停止 运行,PLC停止记录时间。 2.累计的小时数存放在VW0中,分钟存放在VW2中, 秒存放在VW4中。
该类指令对数据进行非运算性处理.
●单一传送:每次传送一个数据。 ●数据块传送:每次传送一组数据。
●
单一传送指令分四类: 字节、字、双字、实数传送。
● 块传送指令分为三类: 字节块、字块、双字块 传送。
◆ EN只要持续一 个扫描周期,就能 完成一次传送。
溢出标志位
ROR
●数据类型: IN和 OUT 为字型数据 N为字节型数据,取值范围: 1~255 。
▲ 指令功能:把两个有符号操作数IN1和IN2 相乘/除,积(或商)存入输出单元 OUT。 整数乘法指令 : ● STL中,乘法指令 的IN2 与 OUT共用一 个存储单元。
整数除法指令: ● STL中,除法指令 的IN1与OUT共用一个 存储单元。 整数乘/除法指令中 输入 / 输出操作数 均为整数 INT 。
▲ 数据类型:输入输出均为字。
厘米 C10 2.54
控制程序如下:
● 数据类型: 输入 / 输出均为字节。
七段码编码表
【例4-4-4】
执行程序:
22系列PLC中具有内部时钟的CPU: CPU224、224XP、226、226XM 时钟操作种类: 读时钟:调用系统内部实时时钟; 写时钟:根据需要设定内部时钟。
第4章 S7-200的功能指令

4.4 程序控制指令 4.4.1 跳转指令
1.跳转与标号指令 JMP线圈通电时,跳转条件满足,跳转指令使程序流程跳转到对应的标号 处。JMP与LBL指令的操作数n为常数0~255,只能在同一个程序块中跳转。 I0.4的常开触点断开时,跳转条件不满足,顺序执行下面的网络。 I0.4的常开触点接通时,跳转到标号LBL 0处,不执行第二个网络。
4.2.3 数据转换指令
1.标准转换指令 除了解码、编码指令之外的10条指令属于标准转换指令。输入参数IN指定的 数据转换后保存到输出参数OUT指定的地址。BCD码与整数相互转换的指令中, 整数的有效范围为0~9999。 如果转换后的数值超出输出的允许范围,溢出标志位SM1.1被置为ON。 2.段码指令 七段显示器的D0~D6段分别对应于段码指令输出字节的第0位~第6位,某 段应亮时输出字节中对应的位为1,反之为0。段码指令很少使用。
【例4-2】用实时时钟定时控制设备。 LD SM0.0 TODR VB70 //小时分钟值在VW73 LDW>= VW73, VW78 //VW78中是起始时、分值 AW< VW73, VW80 //VW80中是结束时、分值 = Q0.2 //在设置的时间范围内, Q0.2为1状态
4.3 数学运算指令 4.3.1 整数运算指令
3.字节、字、双字和实数的传送 传送指令助记符中最后的 B、W 、DW (或D)和R分别表示操作数为字节、 字、双字和实数。 4.字节、字、双字的块传送指令 块传送指令将起始地址为 IN的N个连续的存储单元中的数据,传送到从地 址OUT开始的N个存储单元,字节变量N = 1~255。
5.字节立即读写指令 字节立即读取指令MOV_BIR读取IN指定的一个字节的物理输入,但是并不 更新对应的过程映像输入寄存器。 字节立即写入指令MOV_BIW将一个字节的数值写入OUT指定的物理输出, 同时更新对应的过程映像输出字节。 6.字节交换指令 字节交换指令SWAP用来交换输入字IN的高字节与低字节。应采用脉冲执行 方式。
S7-200 常用功能及编程简介

过程映象寄存器
S7-200 CPU中的特殊存储区,专 S7CPU中的特殊存储区,专 门用于存放从物理输入/ 门用于存放从物理输入/输出点读取或 写到物理输入/ 写到物理输入/输出点的状态。用户程 序通过过程映象寄存器访问实际物理 输入、输出点,可以大大提高程序执 行效率。
5.1.2 S7-200 CPU的工作模式 S7CPU的工作模式
计数器存储区:C 计数器存储区:C
在S7-200 CPU中,计数器可用于累计输入 S7CPU中,计数器可用于累计输入 端脉冲电平由低到高的次数。计数器寻址有两种 形式: 当前值:16位有符号整数,存储累计值。 当前值:16位有符号整数,存储累计值。 计数器位:按照当前值和予置值的比较结果置位 或复位。 两种寻址使用同样的格式,用计数器地址(C+ 两种寻址使用同样的格式,用计数器地址(C+ 计数器号,如 C1)来存取这两种形式的计数器 C1)来存取这两种形式的计数器 数据。究竟使用哪种形式取决于所使用的指令。
S7-200 CPU有两种工作模式:停止模式和运行模 S7CPU有两种工作模式:停止模式和运行模 式。 要改变S7要改变S7-200 CPU的操作模式,有以下几种方法: CPU的操作模式,有以下几种方法: 使用S7使用S7-200 CPU上的模式开关; CPU上的模式开关; CPU上的模式开关在RUN或TARM位置时,可以 CPU上的模式开关在RUN或TARM位置时,可以 使用 Step7编程软件控制CPU的运行和停止; Step7编程软件控制CPU的运行和停止; 在程序中插入STOP命令,可以在条件满足时将 在程序中插入STOP命令,可以在条件满足时将 CPU设置为停止模式。 CPU设置为停止模式。
5.1.3 S7-200 寻址 S7S7-200 CPU将信息存储在不同的 S7CPU将信息存储在不同的 存储器单元,每个单元都有唯一的地 址。 S7-200 CPU使用数据地址访问所 S7CPU使用数据地址访问所 有的数据,称为寻址。输入/ 有的数据,称为寻址。输入/输出点, 中间运算数据等各种数据类型具有各 自的地址定义方式。 S7-200 的大部分 S7指令都需要指定数据地址。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.定义:根据变量的作用范围而定;
2.局部变量的作用: • 用在子程序中便于子程序的移植; • 同一片物理存储器可以在不同的程序中重复使用 (存储临时局部变量); • 在子程序和调用程序之间进行参数的传递。
二、局部变量的类型 TEMP(临时变量) 、 OUT(输出变量) 、
Date: 2019/4/25
Date: 2019/4/25
Page: 2
CH4 第4章 S7-200功能能指令及编程
4.1.2 梯形图中网络与指令 1.网络:梯形图程序中相对独立的段,由触点、线圈、 功能块组成; 2.语句表程序只有正确地划分为网络,才能转换为梯 形图程序; 3.条件输入指令:不能直接接在左母线上(SM0.0) 无条件指令:其执行与能流无关, 直接接在左母线上。
Date: 2019/4/25 Page: 6
三、 循环指令 1. 作用:用于重复执行若干次同样任务的情况 2.循环开始:FOR INDX,INT1,FINAL 循环结束:NEXT 3.循环嵌套:最大深度8
INDX:当前循环计数
CH4 第4章 S7-200功能能指令及编程
INIT:循环初值
FINAL:循环终值
CH4 第4章 S7-200功能能指令及编程
第四章 S7-200功能指令及编程 本章学习目的 l功能指令的含义、表现形式及梯形图网络 l程序控制类指令:控制程序结构与程序执行。 l数据处理、数学运算指令 l中断处理、高速计数与高速脉冲
目的:优化程序、提高程序安全性与可靠性
Date: 2019/4/25
返回本章首页
CH4 第4章 S7-200功能能指令及编程
一.、看门狗复位指令(WDR) • 监控定时器:定时事件为500ms,每次扫描它被自 动复位一次,当正常工作扫描周期小于500ms,不 起作用。 • 在下列情况下扫描周期大于500ms,监控定时器起 作用停止用户程序,避免出现死循环: 用户程序很长 出现中断事件时,执行中断程序时间较长 循环指令使扫描时间延长 • 为了防止正常情况下监控定时器动作,将WDR指令 插入程序适当位置,使监控定时器复位。
Date: 2019/4/25 Page: 5
CH4 第4章 S7-200功能能指令及编程
二、 跳转与标号指令
• 栈顶的值为1时,JMP线圈通电,条件满足,JMP指 令使程序跳转到对应的标号LBL(0-255)处,标号 指令用来指示跳转指令的目的位置。JMP与LBL必须 在同一程序中使用。 • 例1、 LD I2.1 JMP 4 ……… LBL 4 ………e: 2019/4/25
Page: 11
CH4 第4章 S7-200功能能指令及编程
4.3.2 子程序的创建 一、子程序的作用
相对对立、一定功能、有条件调用、便于移植、程序结构清晰
二、子程序的创建 • 编辑-插入-子程序(命名) • 调用参数的子程序需要设置调用的参数,参数在子 程序的局部变量表中定义,最多可传递 16个参数, 参数变量名最多可32个字符 三、子程序调用 • 在主程序、其他子程序或中断程序中调用 • 一个项目中最多64个子程序,子程序最大嵌套深度 为8,在中断程序中调用的子程序不能再调用别的子 程序,慎用递归调用 • CALL 子程序名,参数1,参数2…….;
Date: 2019/4/25
Page: 7
4.举例:在I0.1=1的上升沿,将10,15,20,…,35 这6个数分别送到VW10,VW12,…,VW20 网络1: LD I0.0 EU MOVW +10, AC0 MOVD &VW10,AC1 FOR VW0,1,6 网络2: LD SM0.0 MOVW AC0,*AC1 +D +2,AC1 //修改地址指针 +I +5, AC0 //修改要装入的数 网络3: NEXT
CH4 第4章 S7-200功能能指令及编程
4. 举例:当检测到错误时,诊断LED闪烁。只要检测 到5个错误条件中的一个,诊断LED就闪烁。 语句表程序和梯形图程序如图4-6所示:
Date: 2019/4/25 Page: 9
CH4 第4章 S7-200功能能指令及编程
4.3 子程序
4.3.1 局部变量表 一、局部变量与全局变量
IN(输入变量) IN-OUT(输入-输出变量)
Page: 10
CH4 第4章 S7-200功能能指令及编程
三、局部变量的数据类型: 能流、布尔型、字节、字、双字、整数、双整数和 实数类型 四、局部变量的赋值 在局部变量表中赋值,只需指定局部变量的类型和 数据类型,不用指定存储器地址,程序编辑器自动 在L存储区中为所有局部变量指定存储器位置。起 始地址为L0 五、在局部变量表中增加新的变量
语句表
END MEND STOP WDR JMP n LBL n CALL n(N1,N2…) CRET FOR INDX,INIT,FINAL NEXT DLED Page: 4
描述
程序的有条件结束 程序的无条件结束 暂停指令,由RUN模式切换到STOP模式 看门狗复位 跳到定义的标号 定义一个跳转的标号 调用子程序 从子程序返回 循环 循环结束 诊断LED
Page: 1
返回本章首页
CH4 第4章 S7-200功能能指令及编程
4.1 S7-200指令的基本规则
4.1.1 功能指令的表现形式 一、功能指令的含义:每条指令反映了 PLC的某一 功能,是许多功能不同的子程序。 二、功能指令的表现形式: 方框图(指令盒、功能块)、指令助记符
LD MOVW AENO /I AENO MOVB I0.1 VW10, VW14 VW12, VW14 VB0, VB2
Date: 2019/4/25
Page: 3
CH4 第4章 S7-200功能能指令及编程
4.2 程序控制类指令
程序控制类指令用于程序运行状态的控制,主要包 括系统控制、跳转、循环、子程序调用,顺序控制等
梯形图名称
END MEND STOP WDR JMP LBL RET FOR NEXT DIAG_LED Date: 2019/4/25
Date: 2019/4/25 Page: 8
CH4 第4章 S7-200功能能指令及编程
四、 诊断指令LED 1. 作用:S7-200检测到CPU系统故障时,SF/DIAG (故障/诊断)LED发出红光。 2. LED配置 3. DIAG_LED指令:如果输入参数IN的值为零,就将 诊断LED置为OFF。如果输入参数IN的值大于零, 就将诊断LED置为ON(黄色)。