Android HAL实例解析
《Android深度探索 卷1 HAL与驱动开发》读书笔记思维导图

第6章 第一 个Linux驱动
1
程序:统计
单...
第7章 LED将 2
为我闪烁:控 制发光二级管
3 第8章 让开
发板发出声音: 蜂鸣器驱动
4 第9章 硬件
抽象层:HAL
5 第10章 嵌入
式Linux的调 试技术
01
6.1 Linux驱 动到底是 个什么东 西
02
6.2 编 写Linux 驱动程序 的步骤
18.3 帧 缓冲 (Frame Buffer. ..
04
18.4 FrameBu ffer驱 动的H...
05
18.5 调 用 Gralloc HAL库
06
18.6 小 结
19.1 音频驱动基 础
19.2 AC97芯片 的寄存器
19.3创建声卡
19.4音频逻辑设 备
19.6音频驱动的 HAL分析
15.6内核定时器
15.7内核延迟 15.8小结
01
16.1内 存管理模 式
02
16.2分 配连续的 内存空间 (Kmall o...
03
16.3分 配不连续 的内存空 间 (vmall ...
04
16.4全 局缓存 (slab)
05
16.5Lቤተ መጻሕፍቲ ባይዱn ux内存池
06
16.6虚 拟地址与 物理地址 之间的转 换
2
printk函数
降低Lin...
3 10.3 通过虚
拟文件系统 (/proc)...
4 10.4 调试工
具
5
10.5 小结
第三篇 Linux驱动开发高级技 术
01
第11章 Linux驱 动程序中 的并发控 制
Android Camera HAL3 分析
1Android Camera HAL3 分析本文均属自己阅读源码的点滴总结,转账请注明出处谢谢。
欢迎和大家交流。
qq:1037701636 email:gzzaigcn2009@Software :系统源码Android 5.1Camera3研读前沿:当初在研读Camera1.0相关的内容时,主要围绕着CameraClient 、CameraHardwareInterface 等方面进行工作的开展,无论是数据流还是控制流看起来都很简单、明了,一系列的流程化操作使得整个框架学起来特别的容易。
因为没有Camera2.0相关的基础,所以这次直接看3.0相关的源码时,显得十分的吃紧,再加上底层高通HAL3.0实现的过程也是相当的复杂,都给整个研读过程带来了很多的困难。
可以说,自身目前对Camera3.0框架的熟悉度也大概只有70%左右,希望通过总结来进一步梳理他的工作原理与整个框架,并进一步熟悉与加深理解。
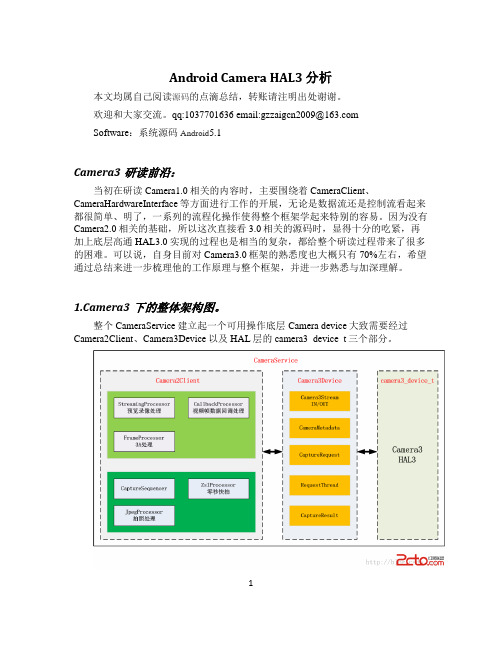
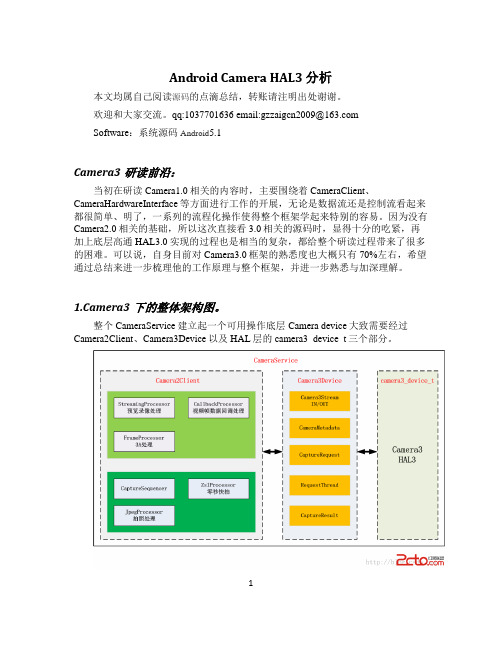
1.Camera3下的整体架构图。
整个CameraService 建立起一个可用操作底层Camera device 大致需要经过Camera2Client 、Camera3Device 以及HAL 层的camera3_device_t 三个部分。
2从上图中可以发现Camera3架构看上去明显比camera1来的复杂,但他更加的模块化。
对比起Android4.2.2 Camer 系统架构图(HAL 和回调处理)一文中描述的单顺序执行流程,Camera3将更多的工作集中在了Framework 去完成,将更多的控制权掌握在自己的手里,从而与HAL 的交互的数据信息更少,也进一步减轻了一些在旧版本中HAL 层所需要做的事情。
2. Camera2Client 的建立与初始化过程在建立好Camera2Client 后会进行initialize 操作,完成各个处理模块的创建: ?123 .... mStreamingProcessor = new StreamingProcessor(this);//preview 和recorder threadName = String8::format(C2-%d-StreamProc,mCameraId);4 5 6 7 8 910111213141516171819202122232425 mStreamingProcessor->run(threadName.string());//预览与录像mFrameProcessor = new FrameProcessor(mDevice, this);// 3AthreadName = String8::format(C2-%d-FrameProc,mCameraId);mFrameProcessor->run(threadName.string()); //3AmCaptureSequencer = new CaptureSequencer(this);threadName = String8::format(C2-%d-CaptureSeq,mCameraId);mCaptureSequencer->run(threadName.string());//录像,拍照mJpegProcessor = new JpegProcessor(this, mCaptureSequencer); threadName = String8::format(C2-%d-JpegProc,mCameraId);mJpegProcessor->run(threadName.string());....mCallbackProcessor = new CallbackProcessor(this);//回调处理threadName = String8::format(C2-%d-CallbkProc,mCameraId);mCallbackProcessor->run(threadName.string());依次分别创建了:StreamingProcessor并启动一个他所属的thread,该模块主要负责处理previews 与record两种视频流的处理,用于从hal层获取原始的视频数据FrameProcessor并启动一个thread,该模块专门用于处理回调回来的每一帧的3A等信息,即每一帧视频除去原始视频数据外,还应该有其他附加的数据信息,如3A值。
aidl hal 实例

aidl hal 实例摘要:1.AIDL 的概念与作用2.HAL 实例的定义与功能3.AIDL 与HAL 实例的关系4.如何创建和使用AIDL hal 实例正文:1.AIDL 的概念与作用AIDL(Android Interface Definition Language)是一种用于定义Android 应用程序中接口的语言。
它允许开发者定义在不同进程之间通信的接口,从而使得不同组件之间可以方便地进行数据交互和通信。
通过使用AIDL,开发者可以轻松地实现跨进程的通信,提高应用程序的灵活性和可扩展性。
2.HAL 实例的定义与功能HAL(Hardware Abstraction Layer)是Android 系统中的一个重要组件,它负责管理硬件资源,并向上层提供统一的接口。
HAL 实例是一个具体的硬件抽象层实现,它封装了特定硬件设备的驱动程序,为上层提供了访问硬件的功能。
在Android 系统中,每个硬件设备都对应一个HAL 实例,例如摄像头HAL、音频HAL 等。
3.AIDL 与HAL 实例的关系AIDL 和HAL 实例在Android 系统中发挥着不同的作用。
AIDL 用于定义接口,而HAL 实例则是具体硬件设备的实现。
在实际应用中,AIDL 和HAL 实例之间的关系是紧密联系的。
HAL 实例需要通过AIDL 接口来与上层组件进行通信,从而实现对硬件设备的控制和管理。
通过使用AIDL,开发者可以轻松地实现跨进程的通信,提高应用程序的灵活性和可扩展性。
4.如何创建和使用AIDL hal 实例要创建AIDL hal 实例,首先需要定义一个AIDL 接口。
开发者需要创建一个名为“aidl”的文件夹,并在其中创建一个名为“interface”的文件夹。
接着,在“interface”文件夹中创建一个与AIDL 接口相关的.aidl 文件。
在这个文件中,开发者可以定义接口中的方法、数据类型等。
当AIDL 接口定义完成后,开发者需要编写一个对应的Java 类。
android hal文件编译规则

android hal文件编译规则
Android HAL (Hardware Abstraction Layer) 文件是 Android 系统中的一种接口定义文件,用于描述硬件设备与 Android 系统之间的交互方式。
为了在 Android 系统中使用这些硬件设备,需要进行相应的 HAL 文件编译。
在 Android 系统中,HAL 文件的编译规则主要包括以下几个步骤:
1. 编写 HAL 文件:首先需要编写相应的 HAL 文件,该文件描述了硬件设备的接口、属性、方法等信息。
编写完成后,需要将其放置在 Android 源代码的对应目录下。
2. 编译 HAL 文件:在 Android 源代码的编译过程中,会自动编译所有的HAL 文件。
编译后的 HAL 文件会被生成到 Android 系统的输出目录中,通常是 out/target/product/<device_name>/system/lib/hw/。
3. 将 HAL 文件安装到设备:在将 Android 系统镜像烧写到设备后,需要将编译好的 HAL 文件复制到设备的对应目录下。
具体路径可以根据实际情况而定,但通常是在 /system/lib/hw/ 目录下。
4. 配置系统参数:在启动 Android 系统时,需要配置相应的系统参数,以加载相应的 HAL 模块。
具体的配置方式可以通过修改文件或者在启动参数中添加相应的参数来实现。
需要注意的是,具体的编译规则和步骤可能会因不同的 Android 版本和设备厂商而有所不同。
因此,在实际操作过程中,建议参考具体的 Android 版本和设备厂商提供的文档和指南。
AndroidCamera原理之cameraHAL底层数据结构与类总结

AndroidCamera原理之cameraHAL底层数据结构与类总结camera HAL层数据结构非常多,看代码的时候常常为了了解这些数据结构找半天,为了方便大家学习,特地总结了一些数据结构以及这些数据结构的位置:1.hardware/libhardware/include/hardware/camera_common. h:1.1 camera_info_t : camera_info1.2 camera_device_status_t : camera_device_status1.3 torch_mode_status_t : torch_mode_status1.4 camera_module_callbacks_t : camera_module_callbacks1.5 camera_module_t : camera_module2.hardware/libhardware/include/hardware/hardware.h:2.1 hw_module_t : hw_module_t2.2 hw_module_methods_t : hw_module_methods_t, 其中hw_module_methods_t 结构如下:这个结构体里面有一个函数指针,什么地方明确了函数指针的指向了?在hardware/libhardware/modules/camera/3_0/CameraHAL.cpp中的167行明确了函数指针指向。
指向其中的open_dev函数。
2.3 hw_device_t : hw_device_t3.hardware/libhardware/include/hardware/camera3.h3.1 camera3_device_t : camera3_device3.2 camera3_device_ops_t : camera3_device_opscamera3_device_ops_t 映射函数指针操作:hardware/libhardware/modules/camera/3_0/Camera.cpp上面的函数指针映射只是抽象层提供一个默认映射方法,实际上芯片中都会复写这个指针函数的映射关系。
AndriodSensorHAL实现(很好的参考价值)
Andriod Sensor HAL实现(很好的参照价值)x1 Android sensor建立Android4.1系统内置对传感器的支持达 13 种,他们分别是:加快度传感器(accelerometer) 、磁力传感器 (magnetic field) 、方向传感器(orientation) 、陀螺仪 (gyroscope) 、环境光照传感器 (light) 、压力传感器 (pressure) 、温度传感器 (temperature) 和距离传感器 (proximity)等。
Android实现传感器系统包含以下几个部分:n java层n JNI层nHAL层n驱动层各部分之间架构图以下:2 Sensor HAL层接口Google为Sensor供给了一致的HAL接口,不一样的硬件厂商需要依据该接口来实现并达成详细的硬件抽象层, Android 中 Sensor 的 HAL 接口定义在:hardware/libhardware/include/hardware/sensors.hn对传感器种类的定义:#defineSENSOR_TYPE_ACCELEROMETER 1 // 加快度传感器#define SENSOR_TYPE_MAGNETIC_FIELD 2 // 磁力传感器 #define SENSOR_TYPE_ORIENTATION3// 方向 #define SENSOR_TYPE_GYROSCOPE4// 陀螺仪 #define SENSOR_TYPE_LIGHT5// 环境光照传感器 #define SENSOR_TYPE_PRESSURE6// 压力传感器 #define SENSOR_TYPE_TEMPERATURE7// 温度传感器 #define SENSOR_TYPE_PROXIMITY 8// 距离传感器 #define SENSOR_TYPE_GRAVITY9#define SENSOR_TYPE_LINEAR_ACCELERATION 10性加快度 #define SENSOR_TYPE_ROTATION_VECTOR 11#define SENSOR_TYPE_RELATIVE_HUMIDITY 12// 线//湿度传感器#defineSENSOR_TYPE_AMBIENT_TEMPERATURE 13。
AndroidHIDL介绍
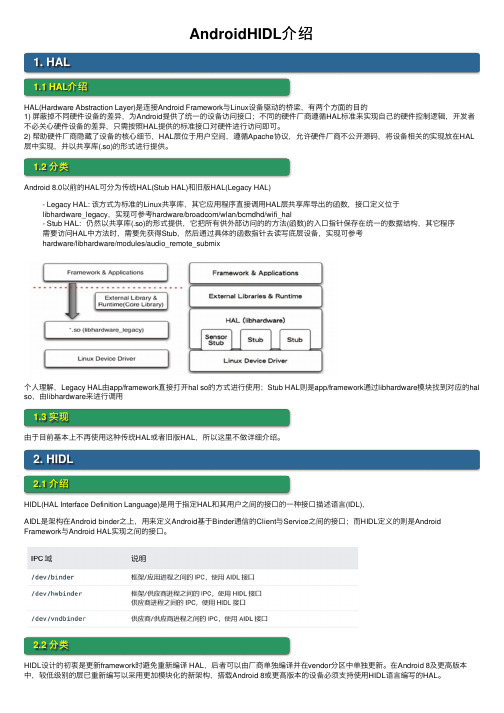
AndroidHIDL介绍1. HAL1.1 HAL介绍HAL(Hardware Abstraction Layer)是连接Android Framework与Linux设备驱动的桥梁,有两个⽅⾯的⽬的1) 屏蔽掉不同硬件设备的差异,为Android提供了统⼀的设备访问接⼝;不同的硬件⼚商遵循HAL标准来实现⾃⼰的硬件控制逻辑,开发者不必关⼼硬件设备的差异,只需按照HAL提供的标准接⼝对硬件进⾏访问即可。
2) 帮助硬件⼚商隐藏了设备的核⼼细节,HAL层位于⽤户空间,遵循Apache协议,允许硬件⼚商不公开源码,将设备相关的实现放在HAL 层中实现,并以共享库(.so)的形式进⾏提供。
1.2 分类Android 8.0以前的HAL可分为传统HAL(Stub HAL)和旧版HAL(Legacy HAL)- Legacy HAL: 该⽅式为标准的Linux共享库,其它应⽤程序直接调⽤HAL层共享库导出的函数,接⼝定义位于libhardware_legacy,实现可参考hardware/broadcom/wlan/bcmdhd/wifi_hal- Stub HAL: 仍然以共享库(.so)的形式提供,它把所有供外部访问的的⽅法(函数)的⼊⼝指针保存在统⼀的数据结构,其它程序需要访问HAL中⽅法时,需要先获得Stub,然后通过具体的函数指针去读写底层设备,实现可参考hardware/libhardware/modules/audio_remote_submix个⼈理解,Legacy HAL由app/framework直接打开hal so的⽅式进⾏使⽤;Stub HAL则是app/framework通过libhardware模块找到对应的hal so,由libhardware来进⾏调⽤1.3 实现由于⽬前基本上不再使⽤这种传统HAL或者旧版HAL,所以这⾥不做详细介绍。
2. HIDL2.1 介绍HIDL(HAL Interface Definition Language)是⽤于指定HAL和其⽤户之间的接⼝的⼀种接⼝描述语⾔(IDL),AIDL是架构在Android binder之上,⽤来定义Android基于Binder通信的Client与Service之间的接⼝;⽽HIDL定义的则是Android Framework与Android HAL实现之间的接⼝。
hidl编译
hidl编译随着手机性能的不断提升,现代应用程序也在不断地变得更加复杂。
为了支持这些复杂的应用程序,Android操作系统提供了许多API和框架,其中一个非常重要的框架就是HAL(Hardware Abstraction Layer)。
HAL是一个位于Linux内核和Android应用程序之间的抽象层,它可以将不同的硬件接口抽象成统一的API。
而其中最关键的组件就是HAL层,它为Android应用开发者提供了一套通用的硬件访问原语,并将其与实际的硬件适配器隔离开来。
而为了简化HAL的编写,Android提供了一种名为HIDL(HAL Interface Definition Language)的语言,它可以让开发者用一种简洁的方式来定义HAL接口。
有了HIDL,开发者只需要声明一个接口名和一组函数原型,就可以使应用程序与系统硬件之间产生联系。
要编写HIDL,开发者需要使用IDL(Interface Definition Language)来描述HAL接口。
IDL是一种用于描述接口的语言,与Java或C++类似,可以定义接口、结构体、常量等,是描述HIDL接口的基础。
在即将进行的编译过程中,IDL文件将被编译为对应语言的接口实现代码。
对于HIDL的编译,一般需要遵循以下步骤:1. 编写IDL文件:开发者需要使用IDL语言来描述HAL接口;2. 使用aidl工具生成对应语言的接口代码:在编写IDL文件后,需要使用aidl工具将IDL文件转化为对应语言的接口代码,通常是Java或C++代码;3. 实现HIDL接口:根据生成的接口代码,开发者需要实现HAL接口的具体功能;4. 编译HIDL:最后,开发者需要将实现后的HIDL接口编译为可执行代码,并集成到Android系统中。
在实际的开发中,HIDL为Android的HAL开发带来了很多便利。
通过使用HIDL,开发者可以更加轻松地编写HAL接口,并将其与实际硬件隔离开来。
Android Telephony原理解析与开发指南

6.2.4 更新 mState
6 Voice Call语音通话模型
6.3.1 GsmCdmaCall
01
6.3.3 DriverCall、 Call、Connection
03
02
6.3.2 GsmCdmaConnecti
on
6.3 通话管理模型分析
6 Voice Call语 音通话模型
6.4 补充通话连接断开处理 机制
息
03 7.4.3 展示小区信
息
02 7 .4. 2 扩展 ITelephonyRegistry
04 7.4.4 小区信息更
新源头
05 7.4.5 信号强度实
时变化
7.5.1 飞行模式开启关 闭入口逻辑
7.5.3 WiFi模块开启关 闭
7.5.2 Radio模块开启关 闭
7.5.4 蓝牙模块开启关 闭
4.1.4 第二个拨号入口
4 详解Telecom
4.2.1 汇总 frameworks/base/telecomm代码
4.2.4 演进Telecom交互 模型
02 01
03 04
4.2.2 绑定 IInCallService机制
4.2 Telecom交互模型
4.2.3 绑定 IConnectionService机制
6.1 详解 GsmCdmaCallTracker
6.4 补充通话连 接断开处理机制
6.2 handlePollCalls 方法
6.5 区分 Connection
6.3 通话管理 模型分析
6.6 扩展 InCallUi
6 Voice Call语音通话模型
6.7 验证Call运行模型
本章小结
Android帧缓冲区(Frame Buffer)硬件抽象层(HAL)模块Gralloc的实现原理分析

Android帧缓冲区(Frame Buffer)硬件抽象层(HAL)模块Gralloc的实现原理分析分类:Android2012-07-2301:251529人阅读评论(16)收藏举报前面在介绍Android系统的开机画面时提到,Android设备的显示屏被抽象为一个帧缓冲区,而Android系统中的SurfaceFlinger服务就是通过向这个帧缓冲区写入内容来绘制应用程序的用户界面的。
Android系统在硬件抽象层中提供了一个Gralloc模块,封装了对帧缓冲区的所有访问操作。
本文将详细分析Gralloc模块的实现,为后续分析SurfaceFlinger服务的实现打下基础。
在前面Android系统的开机画面显示过程分析一文中提到,Linux内核在启动的过程中会创建一个类别和名称分别为“graphics”和“fb0”的设备,用来描述系统中的第一个帧缓冲区,即第一个显示屏,其中,数字0表示从设备号。
注意,系统中至少要存在一个显示屏,因此,名称为“fb0”的设备是肯定会存在的,否则的话,就是出错了。
Android系统和Linux内核本身的设计都是支持多个显示屏的,不过,在Android目前的实现中,只支持一个显示屏。
在前面Android系统的开机画面显示过程分析一文中还提到,init进程在启动的过程中,会启动另外一个进程ueventd来管理系统的设备文件。
当ueventd进程启动起来之后,会通过netlink接口来Linux内核通信,以便可以获得内核中的硬件设备变化通知。
而当ueventd进程发现内核中创建了一个类型和名称分别为“graphics”和“fb0”的设备的时候,就会这个设备创建一个/dev/graphics/fb0设备文件。
这样,用户空间的应用程序就可以通过设备文件/dev/graphics/fb0来访问内核中的帧缓冲区,即在设备的显示屏中绘制指定的画面。
注意,用户空间的应用程序一般是通过内存映射的方式来访问设备文件/dev/graphics/fb0的。
Android深度探索(卷1)HAL与驱动开发(总)
Android深度探索(卷1)HAL与驱动开发(总) 第⼀章Android系统移植与驱动开发概述主要讲了Android系统架构,Android系统移植的主要⼯作,查看Linux内核版本,Linux内核版本号的定义规则,如何学习Linux驱动开发,Linux设备驱动以及Linux驱动的典型例⼦:LED。
⾸先Android是⼀个⾮常优秀的嵌⼊式操作系统,经过了⼏年的快速发展,已经形成了Linux内核,c/c++代码库,Android SDK API,应⽤程序四层系统架构。
然后介绍了⼀下Android系统移植的主要⼯作,主要分为应⽤移植和系统移植两部分。
当然,移植的⼯作说多不多,说少也不少,如果要移植的Android系统提=提供了系统源代码,那就好办多了,直接根据移植的⽬标平台修改驱动代码就可以了。
并且知道了Linux2.6是⽬前使⽤最⼴泛的版本,Android就使⽤了该版本。
那么,怎样学习Linux驱动开发呢,由于Linux的内核版本更新较快,每⼀次内核的变化就意味着Linux驱动的变化,所以学习Linux驱动开发需要⼀个真正的操作系统来搭建Linux驱动的开发环境,并且在该系统下测试Linux驱动。
还有GUN C 也是学习Linux驱动的⼀个必须掌握的技术。
了解了上⾯这些,我认识到学习Linux驱动编程⼀定要了解Linux驱动只与Linux内核有关,与⽤户使⽤的Linux系统⽆关。
唯⼀可以判断Linux内核是否相同的⽅法就是Linux内核版本号。
第⼆章搭建Android开发环境主要介绍了如何搭建Android底层开发的环境,主要包括Android应⽤程序开发环境,Android NDK开发环境和交叉编译环境的搭建。
Android底层开发需要很多⼯具,例如Android SDK,Android NDK等等,搭建Android应⽤程序开发环境都是在Linux下编写和测试的。
由于Android NDK不能作为Android应⽤程序来运⾏,因此,使⽤Android NDK开发程序之前必须先安装Android SDK。
android thermal hal工作机制
android thermal hal工作机制Android Thermal HAL 是 Android 系统中用于管理设备的温度的硬件抽象层(Hardware Abstraction Layer),通过该层可以以统一、统一的方式管理各种硬件设备的温度。
本文将详细介绍 Android Thermal HAL 的工作机制。
Android Thermal HAL 的工作机制可以分为以下几个方面:1. 温度传感器接口:Android Thermal HAL 提供了与温度传感器交互的接口。
温度传感器是用于检测设备的温度的硬件组件,通过该接口可以获取到各个传感器的温度信息。
Android Thermal HAL 通过与温度传感器交互,获取到设备的实时温度数据。
2. 温度级别和阈值:Android Thermal HAL 定义了多个温度级别和相应的阈值。
温度级别是根据温度范围划分的,每个温度级别都有一个对应的阈值。
当设备的温度达到某个级别的阈值时,Android Thermal HAL 将采取相应的措施来降低设备的温度。
3. 热情景模式:Android Thermal HAL 通过定义热情景模式来根据设备的温度级别和阈值采取相应的措施。
热情景模式是一种通过配置文件定义的模式,每个模式都定义了一组与温度级别和阈值相关的操作。
当设备的温度达到某个级别的阈值时,Android Thermal HAL 将根据当前的热情景模式来执行相应的操作,例如降低 CPU 频率、关闭大功率的硬件设备等。
4. 开发者接口:Android Thermal HAL 还提供了开发者接口,使开发者可以通过 API 来与Thermal HAL 进行交互。
开发者可以通过这些接口来查询当前的温度级别、设置热情景模式、获取设备的实时温度数据等。
以上是 Android Thermal HAL 的工作机制的简要介绍。
Android Thermal HAL 通过与温度传感器交互获取设备的温度数据,并根据温度级别和阈值执行相应的措施来降低设备的温度。
hal学习
linux hal (学习整理1)一,介绍:硬件抽象层(Hardware Abstraction Layer,HAL)是一个守护进程,它允许桌面应用程序即时读取硬件信息,这样,无论接口或设备类型如何,应用程序都能找到并使用它们。
用这种方法,图形界面以一种无缝、一致的模式为用户提供所有的资源。
二,热插拔:热插拔会发生很多事情,HAL只是其中一部分。
当一个新设备被加入,例如插入一个U 盘,会发生以下事情(粗略的):∙内核获知此新设备并将其注册到/sys.∙Udev创建一个设备节点(如/dev/sdb1),然后加载必需的驱动/模块。
∙HAL守护进程接到D-Bus的通知,将设备及其相关信息加入到数据库。
∙HAL通过D-Bus将新设备的加入这件事广播给所有订阅程序,如Thunar对此将在快捷边栏上显示图标,或者Metacity/Nautilus对此会在桌面添加一个图标。
∙可能还有其它监听程序,如卷管理器或者AutoFS,它被配置为自动创建挂载点并挂载某些类型的驱动器, 当iPod插入时启动Rhythmbox ,等等。
三,hal 主要功能:主要说来,它提供以下几项功能:1.获取指定类型的设备列表。
2.获取/更改设备的属性值。
3.获取设备具有的能力描述。
4.设备插入/拔除时,通知相关应用程序。
5.设备属性或能力变化时,通知相关应用程序。
udev创建dev下的文件结点,加载驱动程序,让设备处于可用状态。
而HAL则告诉应用程序,现在有哪些设备可用,这些设备的类型、特性和能力,让应用程序知道如何使用它们。
设备的属性管理是HAL最重要任务之一,有的设备属性来源于实际的硬件,有的来源于设备信息文件(/usr/share/hal/fdi/),有的来源其它配置信息(如/usr/share/hwdata/)。
设备属性的都有标准的定义,这些属性定义是HAL的SPEC的主要内容之一,可以参考/~david/hal-spec/hal-spec.html。
Android下Linux摄像头的HAL封装设计

Android下Linux摄像头的HAL封装设计摄像头是现代智能手机的重要组成部分之一,它使我们能够拍摄照片、录制视频以及进行视频通话。
在Android系统中,摄像头的底层硬件抽象层(Hardware Abstraction Layer,HAL)起着至关重要的作用。
HAL是Android操作系统与底层硬件之间的接口,它负责将应用程序的请求转化为硬件操作。
在Android系统中,HAL的封装设计对于摄像头的性能和功能至关重要。
一个好的封装设计能够提高摄像头的稳定性、灵活性和可扩展性。
本文将介绍Android下Linux摄像头的HAL封装设计。
首先,HAL的封装设计应该能够充分利用Linux内核的特性和功能。
Android系统基于Linux内核,因此HAL应该能够与Linux内核紧密配合,充分利用Linux内核的摄像头驱动程序和相关功能。
这样可以避免重复开发和资源浪费,提高系统性能和效率。
其次,HAL的封装设计应该具备良好的可移植性和兼容性。
Android系统运行在不同的硬件平台上,因此HAL应该能够适配不同的硬件平台,并且与不同版本的Android系统兼容。
这样可以使得摄像头在不同的设备上都能够正常工作,提供一致的用户体验。
另外,HAL的封装设计应该考虑到摄像头的多种功能和特性。
现代摄像头具有许多高级功能,如自动对焦、人脸识别、HDR等。
HAL应该提供统一的接口和功能,以便应用程序可以方便地使用这些高级功能。
同时,HAL的封装设计还应该支持摄像头的不同分辨率和帧率设置,以满足不同应用场景的需求。
最后,HAL的封装设计应该考虑到摄像头的性能和功耗。
摄像头是手机中功耗较高的组件之一,因此HAL应该尽量减少对系统资源的占用,提高系统的性能和电池续航时间。
此外,HAL的封装设计还应该具备良好的错误处理机制,以保证系统的稳定性和可靠性。
综上所述,Android下Linux摄像头的HAL封装设计应该充分利用Linux内核的特性和功能,具备良好的可移植性和兼容性,考虑到摄像头的多种功能和特性,以及性能和功耗的优化。
AndroidCameraHAL3分析剖析
Android Camera HAL3 分析本文均属自己阅读源码的点滴总结,转账请注明出处谢谢。
欢迎和大家交流。
qq:1037701636email:********************Software:系统源码Android5.1Camera3研读前沿:当初在研读Camera1.0相关的内容时,主要围绕着CameraClient、CameraHardwareInterface等方面进行工作的开展,无论是数据流还是控制流看起来都很简单、明了,一系列的流程化操作使得整个框架学起来特别的容易。
因为没有Camera2.0相关的基础,所以这次直接看3.0相关的源码时,显得十分的吃紧,再加上底层高通HAL3.0实现的过程也是相当的复杂,都给整个研读过程带来了很多的困难。
可以说,自身目前对Camera3.0框架的熟悉度也大概只有70%左右,希望通过总结来进一步梳理他的工作原理与整个框架,并进一步熟悉与加深理解。
1.Camera3下的整体架构图。
整个CameraService建立起一个可用操作底层Camera device大致需要经过Camera2Client、Camera3Device以及HAL层的camera3_device_t三个部分。
1从上图中可以发现Camera3架构看上去明显比camera1来的复杂,但他更加的模块化。
对比起Android4.2.2 Camer系统架构图(HAL和回调处理)一文中描述的单顺序执行流程,Camera3将更多的工作集中在了Framework去完成,将更多的控制权掌握在自己的手里,从而与HAL的交互的数据信息更少,也进一步减轻了一些在旧版本中HAL层所需要做的事情。
2. Camera2Client的建立与初始化过程在建立好Camera2Client后会进行initialize操作,完成各个处理模块的创建:1 2 3 ....mStreamingProcessor = new StreamingProcessor(this);//preview和recorder threadName = String8::format(C2-%d-StreamProc,mCameraId);24 5 6 7 8 910111213141516171819202122232425 mStreamingProcessor->run(threadName.string());//预览与录像mFrameProcessor = new FrameProcessor(mDevice, this);// 3AthreadName = String8::format(C2-%d-FrameProc,mCameraId);mFrameProcessor->run(threadName.string()); //3AmCaptureSequencer = new CaptureSequencer(this);threadName = String8::format(C2-%d-CaptureSeq,mCameraId);mCaptureSequencer->run(threadName.string());//录像,拍照mJpegProcessor = new JpegProcessor(this, mCaptureSequencer); threadName = String8::format(C2-%d-JpegProc,mCameraId);mJpegProcessor->run(threadName.string());....mCallbackProcessor = new CallbackProcessor(this);//回调处理threadName = String8::format(C2-%d-CallbkProc,mCameraId);mCallbackProcessor->run(threadName.string());依次分别创建了:StreamingProcessor并启动一个他所属的thread,该模块主要负责处理previews 与record两种视频流的处理,用于从hal层获取原始的视频数据FrameProcessor并启动一个thread,该模块专门用于处理回调回来的每一帧的3A等信息,即每一帧视频除去原始视频数据外,还应该有其他附加的数据信息,如3A值。
为Android添加HAL模块
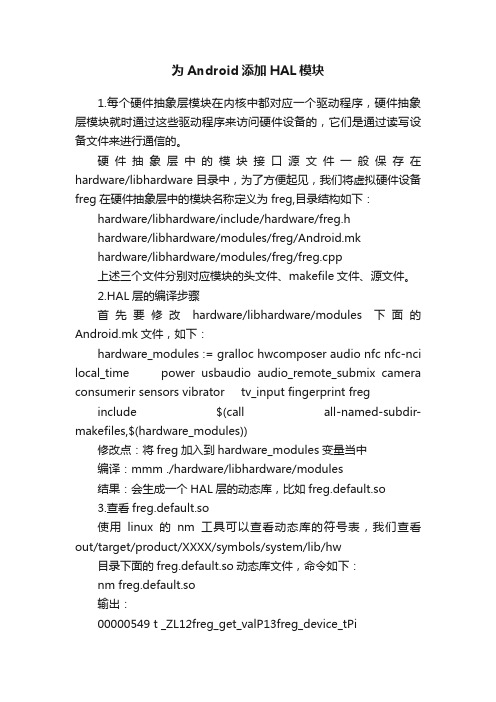
为Android添加HAL模块1.每个硬件抽象层模块在内核中都对应一个驱动程序,硬件抽象层模块就时通过这些驱动程序来访问硬件设备的,它们是通过读写设备文件来进行通信的。
硬件抽象层中的模块接口源文件一般保存在hardware/libhardware目录中,为了方便起见,我们将虚拟硬件设备freg在硬件抽象层中的模块名称定义为freg,目录结构如下:hardware/libhardware/include/hardware/freg.hhardware/libhardware/modules/freg/Android.mkhardware/libhardware/modules/freg/freg.cpp上述三个文件分别对应模块的头文件、makefile文件、源文件。
2.HAL层的编译步骤首先要修改hardware/libhardware/modules下面的Android.mk文件,如下:hardware_modules := gralloc hwcomposer audio nfc nfc-nci local_time power usbaudio audio_remote_submix camera consumerir sensors vibrator tv_input fingerprint freg include $(call all-named-subdir-makefiles,$(hardware_modules))修改点:将freg加入到hardware_modules变量当中编译:mmm ./hardware/libhardware/modules结果:会生成一个HAL层的动态库,比如freg.default.so3.查看freg.default.so使用linux的nm工具可以查看动态库的符号表,我们查看out/target/product/XXXX/symbols/system/lib/hw目录下面的freg.default.so动态库文件,命令如下:nm freg.default.so输出:00000549 t _ZL12freg_get_valP13freg_device_tPi0000059d t _ZL12freg_set_valP13freg_device_ti000004b9 t _ZL16freg_device_openPK11hw_module_tPKcPP11hw_device_t 000004ad t _ZL17freg_device_closeP11hw_device_t00002084 d _ZL19freg_module_methods我们就可以看到确实是有HAL层的函数被编入。
Android:CameraHAL3的参数传递(CameraMetadata)

Android:CameraHAL3的参数传递(CameraMetadata)⼀、camera_metadata简介 Camera API2/HAL3架构下使⽤了全新的CameraMetadata结构取代了之前的SetParameter/Paramters等操作,实现了Java到native到HAL3的参数传递。
引⼊了管道的概念将安卓设备和摄像头之间联系起来,系统向摄像头发送 Capture 请求,⽽摄像头会返回CameraMetadata,这⼀切建⽴在⼀个叫作 CameraCaptureSession 的会话中。
⼆、Framework到HAL层的转换 Camera2Client 使⽤ API1 传递参数采⽤的逻辑是还是在Java层预留了setParameters接⼝,只是当Parameter在设置时⽐起CameraClient⽽⾔,是将这个Parameter根据不同的TAG形式直接绑定到CameraMetadatamPreviewRequest/mRecordRequest/mCaptureRequest中,这些数据会由Capture_Request转为camera3_capture_request中的camera_metadata_t settings完成参数从Java到native到HAL3的传递。
但是在Camera API2下,不再需要那么复杂的转换过程,在Java层中直接对参数进⾏设置并将其封装到Capture_Request即可,即参数控制由Java层来完成。
这也体现了API2中Request和Result在APP中就⼤量存在的原因。
对此为了和Framework Native层相关TAG数据的统⼀,在Java层中⼤量出现的参数设置是通过Section Tag的name来交由Native完成转换⽣成在Java层的TAG。
(1)Java层对应代码位置:frameworks\base\core\java\android\hardware\camera2\impl\CameraMetadataNative.javaprivate <T> T getBase(Key<T> key) {int tag = nativeGetTagFromKeyLocal(key.getName());byte[] values = readValues(tag);if (values == null) {// If the key returns null, use the fallback key if exists.// This is to support old key names for the newly published keys.if (key.mFallbackName == null) {return null;}tag = nativeGetTagFromKeyLocal(key.mFallbackName);values = readValues(tag);if (values == null) {return null;}}int nativeType = nativeGetTypeFromTagLocal(tag);Marshaler<T> marshaler = getMarshalerForKey(key, nativeType);ByteBuffer buffer = ByteBuffer.wrap(values).order(ByteOrder.nativeOrder());return marshaler.unmarshal(buffer);}(2)Native层对应代码位置:frameworks/base/core/jni/android_hardware_camera2_CameraMetadata.cppstatic const JNINativeMethod gCameraMetadataMethods[] = {// static methods{ "nativeGetTagFromKey","(Ljava/lang/String;J)I",(void *)CameraMetadata_getTagFromKey },{ "nativeGetTypeFromTag","(IJ)I",(void *)CameraMetadata_getTypeFromTag },{ "nativeSetupGlobalVendorTagDescriptor","()I",(void*)CameraMetadata_setupGlobalVendorTagDescriptor },// instance methods...... 其中CameraMetadata_getTagFromKey是实现将⼀个Java层的string转为⼀个tag的值,如:android.control.mode。
aidl for hals的native client例子
aidl for hals的native client例子AIDL (Android Interface Definition Language) 是一种用于定义Android 应用程序进程间通信(IPC) 接口的语言。
然而,AIDL 主要用于应用程序进程之间的IPC,而不是用于HAL(硬件抽象层)进程与应用程序进程之间的通信。
在Android 中,HAL 通常使用Binder IPC 机制进行进程间通信,这是Android 平台的一种低级IPC 机制。
HAL 提供的接口通常是通过JNI(Java Native Interface)与Java/Kotlin 代码交互,而JNI 则与C/C++ 代码交互。
因此,AIDL 并不是用于实现HAL 的native client 的最佳选择。
对于HAL 的native client,通常会使用C/C++ 语言和Android 的Binder IPC 机制来实现。
如果你需要一个AIDL 的例子,我可以为你提供一个简单的AIDL 文件示例。
请注意,这只是一个基本的示例,用于说明AIDL 的基本语法和结构。
实际的AIDL 文件将根据具体的应用需求和接口定义而有所不同。
java复制代码// ExampleAIDL.aidlinterface ExampleAIDL {// 定义一个用于传递字符串的接口方法string getGreeting(String name);}此AIDL 文件定义了一个名为ExampleAIDL 的接口,该接口包含一个名为getGreeting 的方法,该方法接受一个字符串参数并返回一个字符串。
要使用此AIDL 文件,你需要使用Android 的AIDL 编译器将其编译成Java 或Kotlin 代码。
然后,你可以在应用程序中实现这个接口,并使用IPC 将调用传递给其他进程。
aidl hal 实例

AIDL HAL 实例介绍在 Android 系统中,AIDL(Android Interface Definition Language)是一种用于在不同进程间进行通信的机制。
而 HAL(Hardware Abstraction Layer)则是用于将硬件驱动程序与操作系统之间进行抽象和解耦的层级。
本文将探讨 AIDL HAL 实例的相关内容,包括 AIDL 的定义、HAL 的概念以及如何使用 AIDL HAL 进行进程间通信。
AIDL 的定义AIDL 是一种用于定义客户端和服务端之间接口的语言。
通过使用 AIDL,开发者可以定义一个接口,并通过接口的方式来实现进程间通信(IPC)。
AIDL 文件定义了接口的方法、参数和返回值类型,以及各种数据类型的支持。
HAL 的概念HAL 是 Android 系统中的一个重要组成部分,它提供了一个接口,用于将硬件驱动程序与操作系统之间进行解耦和抽象。
HAL 可以为不同的硬件提供统一的接口,使得应用程序可以通过统一的方式来访问不同的硬件设备,而不需要关心具体的硬件实现细节。
AIDL HAL 实例下面将通过一个简单的 AIDL HAL 实例来说明如何使用 AIDL HAL 进行进程间通信。
步骤一:定义 AIDL 接口首先,我们需要定义一个 AIDL 接口,用于描述客户端和服务端之间的通信方式。
假设我们要实现一个计算器应用,其中包含加法运算和乘法运算两个方法。
那么我们可以定义一个名为ICalculatorService.aidl的文件,内容如下:interface ICalculatorService {int add(int a, int b);int multiply(int a, int b);}步骤二:实现 AIDL 接口接下来,我们需要在服务端实现上一步中定义的 AIDL 接口。
在服务端的代码中,我们需要实现ICalculatorService.Stub类,并实现其中的抽象方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Android HAL实例解析华清远见讲师刘洪涛一、概述本文希望通过分析台湾的Jollen的mokoid 工程代码,和在s5pc100平台上实现过程种遇到的问题,解析Andorid HAL的开发方法。
二、HAL介绍现有HAL架构由Patrick Brady (Google) 在2008 Google I/O演讲中提出的,如下图。
HAL硬件抽象层(Hardware Abstraction Layer)Android的HAL是为了保护一些硬件提供商的知识产权而提出的,是为了避开linux的GPL束缚。
思路是把控制硬件的动作都放到了Android HAL中,而linux driver仅仅完成一些简单的数据交互作用,甚至把硬件寄存器空间直接映射到user space。
而Android是基于Aparch的license,因此硬件厂商可以只提供二进制代码,所以说Android只是一个开放的平台,并不是一个开源的平台。
也许也正是因为Android不遵从GPL,所以Greg Kroah-Hartman 才在2.6.33内核将Andorid驱动从linux中删除。
GPL和硬件厂商目前还是有着无法弥合的裂痕。
Android想要把这个问题处理好也是不容易的。
HAL 的目的是为了把Android framework 与Linux kernel 完整隔开。
让Android 不至过度依赖Linux kernel,有点像是kernel independent的意思,让Android framework 的开发能在不考虑驱动程序的前提下进行发展总结下来,Android HAL存在的原因主要有:1. 并不是所有的硬件设备都有标准的linux kernel的接口2. KERNEL DRIVER涉及到GPL的版权。
某些设备制造商并不原因公开硬件驱动,所以才去用HAL方式绕过GPL。
3. 针对某些硬件,Android有一些特殊的需求三、HAL内容1、HAL 主要的储存于以下目录:(注意:HAL在其它目录下也可以正常编译)l libhardware_legacy/ - 旧的架构、采取链接库模块的观念进行l libhardware/ - 新架构、调整为HAL stub 的观念l ril/ - Radio Interface Layerl msm7k QUAL平台相关主要包含以下一些模块:Gps、Vibrator、Wifi、Copybit、Audio、Camera、Lights、Ril、Overlay等。
2、两种HAL 架构比较目前存在两种HAL架构,位于libhardware_legacy目录下的“旧HAL架构”和位于libhardware目录下的“新HAL架构”。
两种框架如下图所示。
图3.1 旧HAL架构图3.2 新HAL架构libhardware_legacy 是将*.so 文件当作shared library来使用,在runtime (JNI 部份)以direct function call 使用HAL module。
通过直接函数调用的方式,来操作驱动程序。
当然,应用程序也可以不需要通过JNI 的方式进行,直接加载*.so (dlopen)的做法调用*.so 里的符号(symbol)也是一种方式。
总而言之是没有经过封装,上层可以直接操作硬件。
现在的libhardware 架构,就有stub的味道了。
HAL stub 是一种代理人(proxy)的概念,stub 虽然仍是以*.so檔的形式存在,但HAL已经将*.so 档隐藏起来了。
Stub 向HAL提供操作函数(operations),而runtime 则是向HAL 取得特定模块(stub)的operations,再callback 这些操作函数。
这种以indirect function call 的架构,让HAL stub 变成是一种包含关系,即HAL 里包含了许许多多的stub(代理人)。
Runtime 只要说明类型,即module ID,就可以取得操作函数。
对于目前的HAL,可以认为Android定义了HAL层结构框架,通过几个接口访问硬件从而统一了调用方式。
3. HAL_legacy和HAL的对比HAL_legacy:旧式的HAL是一个模块,采用共享库形式,在编译时会调用到。
由于采用function call形式调用,因此可被多个进程使用,但会被mapping到多个进程空间中,造成浪费,同时需要考虑代码能否安全重入的问题(thread safe)。
HAL:新式的HAL采用HAL module和HAL stub结合形式,HAL stub不是一个share library,编译时上层只拥有访问HAL stub的函数指针,并不需要HAL stub。
上层通过HAL module提供的统一接口获取并操作HAL stub,so文件只会被mapping到一个进程,也不存在重复mapping和重入问题。
下面结合实例来分析HAL编程方法。
4.HAL module架构HAL moudle主要分为三个结构:struct hw_module_t; struct hw_module_methods_t; struct hw_device_t;hw_module_t定义如下:typedef struct hw_module_t { /** tag must be initialized to HARDWARE_MODULE_TAG */uint32_t tag;/** major version number for the module */uint16_t version_major;/** minor version number of the module */uint16_t version_minor;/** Identifier of module */const char *id;/** Name of this module */const char *name;/** Author/owner/implementor of the module */const char *author;/** Modules methods */ struct hw_module_methods_t* methods; //硬件模块的方法/** module's dso */void* dso;/** padding to 128 bytes, reserved for future use */uint32_t reserved[32-7];} hw_module_t;硬件模块方法结构体hw_module_methods_t定义如下:typedef struct hw_module_methods_t { /** Open a specific device */ int (*open)(const struct hw_module_t* module, const char* id,struct hw_device_t** device);} hw_module_methods_t;只定义了一个open方法,其中调用的设备结构体参数hw_device_t定义如下:typedef struct hw_device_t { /** tag must be initialized to HARDWARE_DEVICE_TAG */uint32_t tag;/** version number for hw_device_t */uint32_t version;/** reference to the module this device belongs to */ struct hw_module_t* module;/** padding reserved for future use */uint32_t reserved[12];/** Close this device */int (*close)(struct hw_device_t* device);} hw_device_t;他们的继承关系如下图:open()\\\hw_module_t----------------tag:uint32_t, , , , ,\\\\hw_device_t--------------- close()5HAL使用方法(1)Native code通过hw_get_module调用获取HAL stub:hw_get_module(LED_HARDWARE_MODULE_ID, (const hw_module_t**)&module)(2)通过继承hw_module_methods_t的callback来open设备:module->methods->open(module,LED_HARDWARE_MODULE_ID, (struct hw_device_t**)device);(3)通过继承hw_device_t的callback来控制设备:sLedDevice->set_on(sLedDevice, led);sLedDevice->set_off(sLedDevice, led);6 HAL stub编写方法(1)定义自己的HAL结构体,编写头文件led.h, hardware/hardware.hstruct led_module_t {struct hw_module_t common;};struct led_control_device_t {struct hw_device_t common;int fd; /* file descriptor of LED device *//* supporting control APIs go here */int (*set_on)(struct led_control_device_t *dev, int32_t led);int (*set_off)(struct led_control_device_t *dev, int32_t led);};2)设计led.c 完成功能实现和HAL stub注册(2.1)led_module_methods继承hw_module_methods_t,实现open的callback struct hw_module_methods_t led_module_methods = {open: led_device_open};(2.2)用HAL_MODULE_INFO_SYM实例led_module_t,这个名称不可修改tag:需要制定为HARDWARE_MODULE_TAGid:指定为HAL Stub 的module IDmethods:struct hw_module_methods_t,为HAL 所定义的「method」const struct led_module_t HAL_MODULE_INFO_SYM = {common: {tag: HARDWARE_MODULE_TAG,version_major: 1,version_minor: 0,id: LED_HARDWARE_MODULE_ID,name: "Sample LED Stub",author: "The Mokoid Open Source Project",methods: &led_module_methods,}/* supporting APIs go here. */};(2.3)open是一个必须实现的callback API,负责申请结构体空间,填充信息,注册具体操作API接口,打开Linux驱动。