提高动目标检测能力的雷达编码信号优选方法
高重频动目标检测雷达对相参有源干扰的抗干扰能力分析

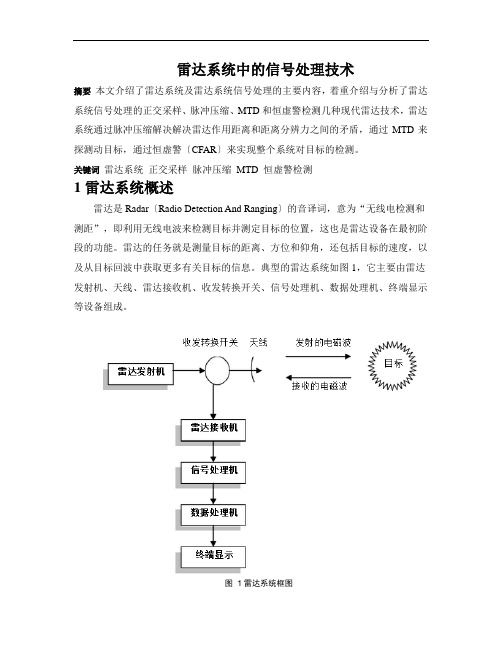
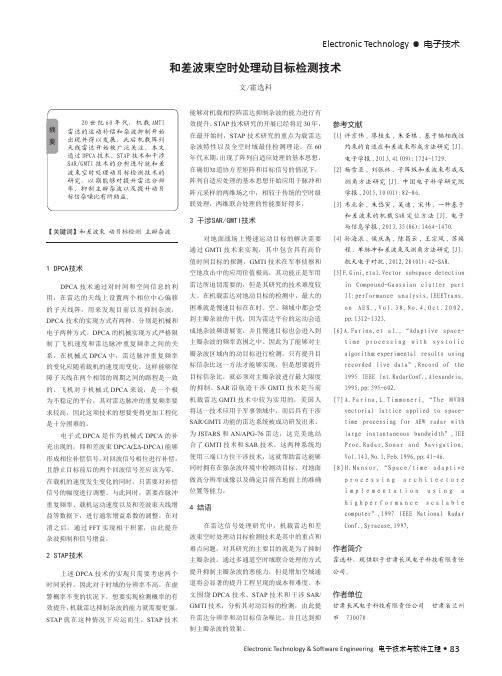
SMSP干 扰 效 果 (距 离 域 )
81dSP干 扰 效 果 (速 度 域 )
SMSP ̄
(距 离 域 )
SMSP- T- ̄
(速 窿 域 )
喝
书 星
五 ∈ 《
∞
] 兰
E 《
田
书 三
a e
…
多 普 勒 频 率 (KHz)(模 糊 值 )
0 200 4加
1相参有源干扰 的主要 方法
常 见 相 参 有 源 干 扰 方 法 主 要 有 : 卷 积 噪 声 干 扰 、SM SP干 扰 、C&I干 扰 、密 集 假 目标 干 扰 、 组 群 假 目标 及 拖 拽 式 干 扰 。
1.1卷积噪声干扰
(f)= (f)@ n(f)
(1)
式 中 ,s(t)一 截 获 的 雷 达 发 射 信 号 ,j(t)一
一 干 扰
1 .
5
拖
拽
式
干
扰
时 隙 数 。
1 8 · 电子 技术 与 软件 工程 Electronic Technology&Software Engineering
Communications Technology· 通信技术
卷 授 暖 声 干 扰 效 果 (距 离 域 )
卷 歌噪 声千 扰 效 果 £速 度域 1
干 扰 信 号 ,n(t)一 高 斯 白噪 声 ,@ 卷 积 运 算 。
l_2 SMSP干 扰
(f)=s(nt)
(f)= o一 )= 。)@萎 。一f )(2)
式 中 ,j (t)- 抽 取 后 的 雷 达 信 号 ,s(t)、
j(t)同 上 ,n 抽 取 倍 数 ,6(·)一 Dirac delta函 数 。
雷达系统中的信号处理技术
雷达系统中的信号处理技术摘要本文介绍了雷达系统及雷达系统信号处理的主要内容,着重介绍与分析了雷达系统信号处理的正交采样、脉冲压缩、MTD和恒虚警检测几种现代雷达技术,雷达系统通过脉冲压缩解决解决雷达作用距离和距离分辨力之间的矛盾,通过MTD来探测动目标,通过恒虚警〔CFAR〕来实现整个系统对目标的检测。
关键词雷达系统正交采样脉冲压缩MTD 恒虚警检测1雷达系统概述雷达是Radar〔Radio Detection And Ranging〕的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
雷达的任务就是测量目标的距离、方位和仰角,还包括目标的速度,以及从目标回波中获取更多有关目标的信息。
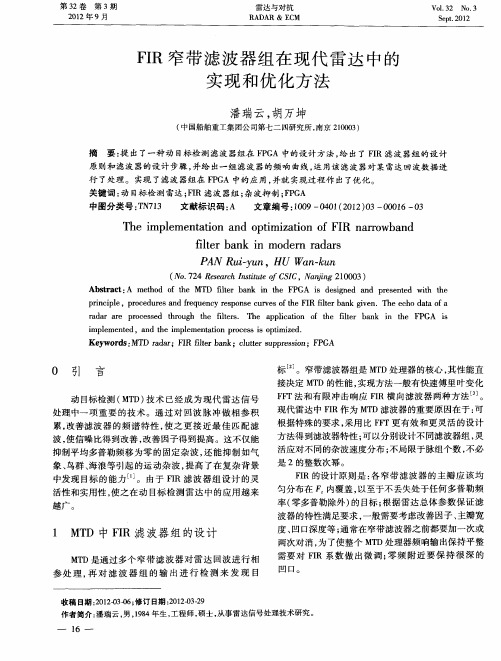
典型的雷达系统如图1,它主要由雷达发射机、天线、雷达接收机、收发转换开关、信号处理机、数据处理机、终端显示等设备组成。
图1雷达系统框图随着现代电子技术的不断发展,特别是数字信号处理技术、超大规模集成数字电路技术、电脑技术和通信技术的告诉发展,现代雷达信号处理技术正在向着算法更先进、更快速、处理容量更大和算法硬件化方向飞速发展,可以对目标回波与各种干扰、噪声的混叠信号进行有效的加工处理,最大程度低剔除无用信号,而且在一定的条件下,保证以最大发现概率发现目标和提取目标的有用信息。
雷达发射机产生符合要求的雷达波形,然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由雷达接收机接收,然后对雷达回波信号依次进行信号处理、数据处理,就可以获知目标的相关信息。
雷达信号处理的流程如下:图 2 雷达信号处理流程2雷达信号处理的主要内容雷达信号处理是雷达系统的主要组成部分。
信号处理消除不需要的杂波,通过所需要的目标信号,并提取目标信息。
内容包括雷达信号处理的几个主要部分:正交采样、脉冲压缩、MTD和恒虚警检测。
正交采样是信号处理的第一步,担负着为后续处理提供高质量数据的任务。
MTI动目标显示雷达

样,取样后的波形和频谱均将发生变化。
动目标显示雷达的工作原理及主要组成
当用多普勒效应来鉴别运动目标回波和固定目标回波时, 与普通脉冲雷 达的差别是必须在相位检波器的输入端加上基准电压(或称相参电压) ,该 电压应和发射信号频率相参并保存发射信号的初相, 且在整个接收信号期间 连续存在。 工程上,基准电压的频率常选在中频(相位检波器的相位基准) 。各种 回波信号均与基准电压比较相位。从相位检波器输出的视频脉冲,有固定目 标的等幅脉冲串和运动目标的调幅脉冲串。通常在送到终端(显示器或数据 处理系统)去之前要将固定杂波消去,故要采用相消设备或杂波滤波器,滤 去杂波干扰而保存运动目标信息。 下面着重讨论相参电压的获取和固定杂波 消除这两个特殊问题。
脉冲工作状态时的多普勒效应 盲速和频闪
盲速:是指目标虽然有一定的径向速度������������ ,但若其回波信号经过相位检 波器后,输出为一串等幅脉冲,与固定目标的回波相同,此时的运动速度称 为盲速。 (������������ 等于脉冲重复频率������������ 的整数倍) 频闪: 频闪效应是指当脉冲工作状态时,相位检波器输出端回波脉冲信 号的包络调制频率������������ ,与目标运动的径向速度������������ 不再保持正比关系。此时如 用包络调制频率测速时将产生测速模糊。 (即������������ 超过重复频率������������ 的一半) 产生盲速和频闪效应的基本原因在于, 脉冲工作状态是对连续发射的取
2.消除固定目标回波
在相位检波器输出端, 固定目标的回波是一串振幅不变的脉冲,而运动 目标的回波是一串振幅调制的脉冲。将它们加到偏转调制显示器上,固定目 标的回波是振幅稳定的脉冲,而运动目标的回波呈现上下“跳动”的“蝴蝶 效应” 。 可以根据这种波形特点, 在偏转显示器上区分固定目标与运动目标。 如果要把回波信号加到亮度调制显示器或终端数据处理设备, 则必须先消除 固定目标回波。 最直观的一种办法是将相邻重复周期的信号相减,使固定目 标回波由于振幅不变而相互抵消; 运动目标回波相减后剩下相邻重复周期振 幅变化的部分输出。 A. 相消设备特性 相消设备等效于一个梳齿形滤波器,其频率特性在������ = ������������ ������ 各点均为零。 固定目标频谱的特点是,谱线位于������������������ 点上,因而在理想情况下,通过相消 器这样的梳齿滤波器后输出为零。 但当目标的多普勒频率为重复频率整数倍 时,其频谱结构也有相同的特点,故通过上述梳状滤波器后无输出。 B. 数字相消器 相消器需要迟延线将信号迟延一个脉冲重复周期并和未迟延的信号相 减。 现代大规模的集成电路的迅猛发展,可完全用数字技术来实现信号的存 储、延时和各种实时运算。 首先把从相位检波器输出的模拟信号变为数字信号。 以时钟脉冲控制取 样保持电路对输入相参视频信号取样, 被时间量化的取样保持信号送到模数 转换电路(A/D 变换器)进行幅度分层,转为数字信号输出。数字信号的延 迟可用存储器完成, 将数字信号按取样顺序写入存储器内,当下一个重复周 期的数字信号到来时, 由存储器中都会出同一距离单元的信号进行相减运算, 在输出端得到跨周期相消的数字信号。 一般取样间隔应小于脉冲宽度的一半, 即在一个脉冲宽度以内取样两次 以上。A/D 变换器的量化位数 N 应选到 N≥7 后,量化损失低于 0.08dB,可 以忽略其影响。N 的选择还对系统改善因子有影响。
基于广义Rao检验的单/多比特MIMO_雷达运动目标检测方法
第46卷 第1期2024年1月系统工程与电子技术SystemsEngineeringandElectronicsVol.46 No.1January 2024文章编号:1001 506X(2024)01 0105 08 网址:www.sys ele.com收稿日期:20220920;修回日期:20221122;网络优先出版日期:20230201。
网络优先出版地址:http:∥kns.cnki.net/kcms/detail/11.2422.TN.20230201.1510.001.html基金项目:深圳市科技计划(KQTD20190929172704911)资助课题 通讯作者.引用格式:黄广佳,程旭,饶彬,等.基于广义Rao检验的单/多比特MIMO雷达运动目标检测方法[J].系统工程与电子技术,2024,46(1):105 112.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:HUANGGJ,CHENGX,RAOB,etal.One/multi bitMIMOradardetectionofamovingtargetbasedongeneralizedRaotest[J].SystemsEngineeringandElectronics,2024,46(1):105 112.基于广义犚犪狅检验的单/多比特犕犐犕犗雷达运动目标检测方法黄广佳,程 旭 ,饶 彬,王 伟(中山大学电子与通信工程学院,广东深圳518107) 摘 要:通道数的增加在提高多输入多输出(multiple inputmultiple output,MIMO)雷达目标检测性能的同时,也显著增加了数据的传输量和处理负担。
针对运动目标的集中式MIMO雷达检测问题,首先对雷达回波数据进行比特量化,然后再进行融合检测处理。
由于广义似然比检验(generalizedlikelihoodratiotest,GLRT)需要对未知参数进行最大似然估计(maximumlikelihoodestimation,MLE),而上述问题中未知参数的MLE没有闭合解,导致相应的检验统计量的计算量较大。
阵列雷达动目标检测多维域方法研究

阵列雷达动目标检测多维域方法研究阵列雷达动目标检测多维域方法研究摘要:随着雷达技术的不断发展,特别是阵列雷达技术的应用,动目标检测在军事、安防等领域中变得越来越重要。
针对传统雷达动目标检测方法存在的问题,本文提出了一种基于多维域方法的新型阵列雷达动目标检测方案。
通过综合利用时域、频域和梅尔频谱特征,该方法能够有效地提取目标的时频特征、功率分布信息和语音特征,实现对动目标的精确检测和定位。
通过在实际场景下进行仿真实验,验证了本文提出的多维域方法在阵列雷达动目标检测中的有效性。
关键词:阵列雷达;动目标检测;多维域方法;时频特征;功率分布;语音特征一、引言阵列雷达作为一种新兴的雷达技术,具有较高的角分辨率、探测距离远等特点,被广泛应用于战争、安防、交通等领域。
而动目标检测技术则是阵列雷达的一个重要研究方向,它能够对目标进行实时监测和定位,为后续的目标跟踪和识别提供基础数据。
然而,传统的雷达动目标检测方法存在一些问题,如不能有效地提取目标的时频特征、容易受到噪声的干扰等。
为了解决这些问题,本文提出了一种基于多维域方法的阵列雷达动目标检测方案。
该方法采用时域、频域和梅尔频谱特征相结合的方式来描述目标的特征信息。
具体来说,一方面,时域特征能够提取目标在时间上的动态变化特性,包括目标的位置、速度和加速度等信息;另一方面,频域特征则能够提取目标的频率成分,用于判断目标的类型和状态;而梅尔频谱特征则能够提取目标的声音特征,用于判断目标的身份信息。
通过综合利用这些特征,可以更准确地检测和定位动目标。
二、阵列雷达动目标检测多维域方法(一)时域特征提取在阵列雷达动目标检测中,时域特征是最基本且最重要的特征之一。
通过对不同阵列元素的接收信号进行时延和多普勒特性分析,可以获得目标在时间上的动态变化特性。
具体来说,可以利用空间域导向滤波器和距离-速度-加速度模型来估计目标的位置、速度和加速度。
通过对目标的位置信息进行跟踪,可以实现对动目标的精确定位。
机载-星载雷达地面动目标检测方法研究

机载-星载雷达地面动目标检测方法研究机载/星载雷达地面动目标检测方法研究摘要:随着科技的迅猛发展,机载/星载雷达地面动目标检测方法研究成为了当前雷达技术领域的热点问题。
本文通过综述了解到,机载/星载雷达地面动目标检测方法主要分为信号处理方法和数据处理方法两大类。
其中,信号处理方法主要包括协方差和相关矩阵特征、振荡参数估计和时间频率谱分析等;数据处理方法则主要包括跳频信号特性分析和目标特征提取等。
在研究的过程中,我们发现了一些挑战,如弱目标检测、杂波抑制和小目标检测等。
最后,我们提出了一些未来的研究方向,包括多源数据融合、机器学习算法的应用和目标跟踪技术的发展等。
关键词:机载雷达、星载雷达、地面动目标检测、信号处理方法、数据处理方法、挑战、研究方向1. 引言机载/星载雷达是一种利用无线电波进行探测和测量的技术,广泛应用于军事、航空航天、气象、地质勘探等领域。
地面动目标检测是机载/星载雷达的重要研究方向之一,其在军事侦察、自然灾害监测等方面具有重要意义。
本文将重点研究机载/星载雷达地面动目标检测方法,并提出一些未来的研究方向。
2. 机载/星载雷达地面动目标检测方法综述机载/星载雷达地面动目标检测方法主要分为信号处理方法和数据处理方法两大类。
2.1 信号处理方法信号处理方法是机载/星载雷达地面动目标检测的基础。
其中,协方差和相关矩阵特征是常用的信号处理方法之一。
通过对雷达接收到的信号进行协方差和相关矩阵分析,可以提取出地面目标的特征信息。
另外,振荡参数估计也是一种常用的信号处理方法。
振荡参数估计可以通过对接收到的信号进行频率分析,来估计出地面目标的运动参数,从而实现地面动目标的检测。
此外,时间频率谱分析也是一种有效的信号处理方法。
时间频率谱分析可以将信号分解成时域和频域两个维度,从而更准确地描述地面目标的运动特性。
2.2 数据处理方法数据处理方法是机载/星载雷达地面动目标检测的关键。
其中,跳频信号特性分析是一种常用的数据处理方法。
一种改进的高频雷达机动目标检测方法

摘
要 : 了解 决 多项 式相位 法检 测机 动 目标 时存在 计 算 复杂 度 过 高、 谱 峰 干扰 严 重 、 为 伪 系统检 测
效率过低等问题 , 出了改进的算法。在此基础上给 出了基于改进算法的距 离 一 提 加速度谱 图检测 目标 机 动信 息的模 式并 证 明 了该检 测模 式 的合理 性 。利 用 实测 数 据进 行 了仿 真 , 真 结 果验 证 了 仿 该改进算法在高频雷达机动 目 标检测方面的有效性。 关键 词 : 高频 雷达 ; 动 目标检 测 ; 机 多项 式相位 法 ; 离 一加速 度谱 距
Hi h Fr q e c d r g - e u n y Ra a
YANG i Fe ,ZHU n - u n,HUANG n h Bi g y a Yi - e,LEIZh — o g iy n
( a n eerhIstt o l t nc eh o g , a n 10 3 C i ) N migR sac ntue f e r is cnl y N mi 2 0 1 , hn i E co T o g a
tci n e ce c ft e s se ,a mp o e . l o t m i gv n i i a e . B s d o h t e d e t f i n y o y tm o i h n i r v d ag r h s ie n t sp p r a e n t a ,a n w mo e i h
s e t m p过 电离层对 高频 电磁 波 的反射
标检测算法。该算法利用多项式为 目 标回波相位建 模 , 过 高 阶模 糊 函 数 【 估 计 多 项 式 的 各 阶 系 数 、 通 2 逐步消除相位的高次项 , 并对最终 的线性相位信号 进 行 相干 积累 、 零 频处 进 行 恒 虚警 检 测 。该 算 法 在
雷达相位编码

雷达相位编码雷达技术作为一种重要的监测和探测工具,在军事、航空、气象等领域起着至关重要的作用。
而雷达相位编码作为现代雷达技术的一个关键环节,具有重要的理论和实践意义。
本文将从理论原理、编码方式和应用领域三个方面对雷达相位编码进行探讨。
一、理论原理雷达相位编码是指在雷达信号的发射和接收过程中,通过改变雷达的发射信号相位,实现对目标的距离、速度和角度等信息的获取。
在雷达系统中,发射信号的相位编码可以采用线性调频、频偏编码、多址编码等方式,以实现不同的测量目标。
其中,线性调频编码是最常用的一种方式,通过改变发射信号的频率梯度,实现对目标距离的精确测量。
而频偏编码可以根据接收到的目标回波信号的相位差异,实现对目标速度和角度的测量。
二、编码方式1. 线性调频编码线性调频编码是通过改变雷达发射信号的频率梯度来实现距离测量的一种编码方式。
其原理是根据信号的到达时间和频率来计算目标的距离。
在雷达信号发射时,通过线性改变信号的频率,当发射信号与目标回波信号发生重叠时,即可计算出目标的距离。
2. 频偏编码频偏编码是通过改变雷达发射信号的相位差异来实现对目标速度和角度的测量。
当目标相对于雷达系统移动时,目标回波信号的相位将发生变化。
通过测量这种相位差异,可以计算出目标的速度和角度信息。
三、应用领域雷达相位编码作为雷达技术的核心内容,广泛应用在军事、航空、气象等领域中。
在军事领域中,雷达相位编码可以实现高精度目标跟踪和导弹制导,提高军事作战的命中率和准确性。
在航空领域中,雷达相位编码可以用于飞机导航、地形测绘等应用,提供航空安全和航线规划的重要数据。
在气象领域中,雷达相位编码可以实现天气预报和气象灾害监测,提高气象服务的准确性和及时性。
总之,雷达相位编码作为现代雷达技术的一个重要环节,具有广泛的应用前景和重要的理论研究价值。
随着技术的不断发展,雷达相位编码将进一步提升雷达系统的性能和功能,为各个领域的应用提供更加精确和可靠的数据支持。
长时间积累下雷达高速目标检测算法综述

长时间积累下雷达高速目标检测算法综述
徐环;尚尚;石依山
【期刊名称】《遥测遥控》
【年(卷),期】2024(45)2
【摘要】隐身技术与高速飞行器的发展给雷达探测目标带来了严峻挑战,而长时间积累技术就是在信号处理领域帮助雷达进行目标检测时提高信噪比的一种有效方法。
对于高速高机动目标而言,信号在长时间累积中会在距离域和多普勒域引起跨距离
单元走动和跨多普勒单元走动问题。
“两跨”问题会严重影响积累增益,传统的MTD(Moving Target Detection,运动目标检测)方法已经无法对信号进行能量累积。
为了解决“两跨”问题,提高雷达对高速目标的探测性能,近些年已涌现很多方法,本文将依据目标运动模型把长时间积累下分为径向匀速运动下的长时间积累、
径向加速运动下的长时间积累、径向高阶复杂运动下的长时间积累三类进行分析,
对相应模型下的“两跨”问题与解决方法进行综述和总结,意在为后续研究提供参考。
【总页数】10页(P89-98)
【作者】徐环;尚尚;石依山
【作者单位】江苏科技大学海洋学院
【正文语种】中文
【中图分类】TN957
【相关文献】
1.泛探雷达长时间相参积累目标检测方法研究
2.高速微弱目标长时间积累对雷达方程的影响
3.MIMO雷达长时间积累下的参数优选算法研究
4.采用长时间相参积累技术的高速机动目标检测快速算法
5.雷达高速高机动目标长时间相参积累检测方法
因版权原因,仅展示原文概要,查看原文内容请购买。
FIR窄带滤波器组在现代雷达中的实现和优化方法
标 J 。窄 带滤 波器组 是 M D处 理器 的核 心 , 性能 直 T 其 接决 定 MT D的性能 , 实现 方法一 般有 快速傅 里 叶变 化 F T 法 和 有 限 冲击 响应 FR横 向滤 波器 两 种 方法 J F r I 。 现 代雷 达 中 FR作为 MT I D滤 波器 的重要 原 因在于 : 可
波器 的特性 满足 要求 , 一般 需要考 虑改 善 因子 、 主瓣宽
1 MT 中 FR滤 波器组 的设计 D I
M D是通 过 多个 窄 带 滤 波 器 对雷 达 回波 进行 相 T
度 、 口深 度等 ; 凹 通常在 窄带 滤波 器之前 都要 加一 次或
两次对消 , 为了使整个 M D处理器频响输出保持平整 T 需要 对 FR 系 数 做 出微 调 ; 频 附 近 要 保 持 很 深 的 I 零
根据特 殊 的要 求 , 采用 比 F T 更 有 效 和更 灵 活 的设 计 f r 方 法得 到滤 波器特 性 ; 以分 别设计 不 同滤 波器组 , 可 灵 活应对 不 同的杂 波速度 分布 ; 不局 限于 脉组个 数 , 不必 是 2的整数 次幂 。 F R的设 计 原则 是 : 窄带 滤 波 器 的主 瓣 应 该 均 I 各
中发现 目标 的 能 力 【 。 由 于 FR 滤 波 器组 设 计 的灵 l J I
活 性 和实用 性 , 之在 动 目标 检测 雷达 中 的应 用越 来 使
越广。
匀分布 在 F 内覆 盖 , 以至 于不 丢失处 于任 何多 普勒 频 率 ( 多普 勒除外 ) 目标 ; 据雷 达 总体 参 数保 证 滤 零 的 根
摘 要 : 出了一种动 目标检 测 滤波 器组在 F G 中的设计 方法 , 出 了 FR滤 波器 组 的设 计 提 PA 给 I 原则 和滤 波器 的设计 步骤 , 并给 出一组 滤 波器 的频响 曲线 , 运用该 滤 波器对 某 雷达 回 波数 据进 行 了处理 。 实现 了滤 波 器组在 F G 中的应 用 , PA 并就 实现过程 作 出了优化 。
【doc】一种MTD的优化设计及实际应用

一种MTD的优化设计及实际应用2005年3月火控雷达技术第34卷文章编号:1OO8—8652(2005)01—009—004一种MTD的优化设计及实际应用汪莉君罗丰吴顺君(西安电子科技大学西安710071)【摘要】根据某型雷达的具体情况,MTD的滤波器组采用了切比雪夫加权设计方法,对相关的信号处理方法如?to-虚警检测等关键问题作了讨论.测试结果表明,该MTD系统对地杂波的抑制比大于55dB,对动杂波的抑制比大于45dB,能够达到较好的动目标检测效果.关键词:MTD;切比雪夫;多普勒滤波器组;恒虚警;改善因子中图分类号:TN713;TN959.11文献标识码:A AnImprovedDesignandPracticalApplicationofMTD WangIijunIUOFengwuShunjun(NationalKeyLabfo,Rada~'SignalProcessing,XidianUniversity,Xi'a}l710071) Abstract:AChebyshevweightedDopplerfilterbankisadoptedforanewtypeofradar.Inthisp aper, therelevantprocessingmethodisdescribedandthekeyproblemssuchasCFARdetectionare discussed. TheexperimentresultsshowthattherejectionradioofMTDsystemtOthegroundclutterisgre aterthan55dB,andtherejectionradioofMTDsystemtOthemovingclutterisgreaterthan45dB. Keywords:MTD;Chebyshev;Dopplerfilterbank;CFAR;improvementfactor引言动目标检测(MTD)技术已经成为现代雷达信号处理中一项重要的技术,通过对回波脉冲作相参积累实现匹配滤波,使信噪比得到改善,在复杂背景中发现目标的能力得到提高.本文将对用于某型号警戒雷达信号处理系统中的MTD设计及其应用作简要阐述,多普勒滤波器组是MTD系统的核心,其性能决定MTD的性能,其实现常用快速傅里叶变换(FFT)和有限冲激响应(FIR)横向滤波器两种方法.前者灵活性较差,且杂波可能通过较高的副瓣(一13.2dB)进人而导致改善因子下降,常不能满足要求;而FIR滤波器具有灵活性,可根据实际的杂波特性,选用不同的加权得到满足要求的滤波器.实践证明,在被处理脉冲数较多(大于16)的情况下,MTD有较好的效果],基于该型号雷达脉冲序列较短的特点,本文采用一种基于切比雪夫加权的滤波器设计,使主响应之外的滤波器副瓣低于规定值,同时使滤波器响应主瓣宽度最小.另外,对于相应的信号处理方法尤其是恒虚警检测等问题进行了阐述.测试结果表明,基于该方法的MTD系统能够达到预期的效果.2MTD滤波器的设计2.1多普勒滤波器组雷达探测的目标大多为运动目标,如飞机,舰船,导弹等,而目标的周围经常存在着各种地物,海浪,气象及箔条干扰等杂波.运动目标和杂波(包括固定杂波和运动杂波)的差别主要体现在其速度上,通常后者运动收稿日期:2004—9—1392005年3月火控雷达技术第34卷速度远比目标运动速度低,这一速度差别反映在雷达回波中是它们的多普勒频移不同.这样,在时域上互相混叠的目标回波信号和杂波干扰有可能从频域上予以区分.实际工作中,MTD是通过用多个带通多普勒滤波器组成的滤波器组对雷达回波进行滤波处理,再对滤波器组的输出进行检测来发现目标的.目前MTD多普勒滤波器组常采用有限脉冲响应(FIR)滤波器来实现.图1所示为N阶MTD多普勒滤波器的结构,丁为脉冲重复周期,.~为FIR滤波器的加权系数.通常所用的常规MTD滤波器[2具较高的副瓣电平,这样容易造成滤波器组中不同滤波器的目标之间相互影响,可能带来虚警;另外,进入滤波器副瓣的杂波也会降低滤波器的杂波抑制性能.解决上述缺陷的方法有:在带通滤波器之前先采用对消器,将杂波的主要部分滤掉,这样后接的各滤波器的改善因子会有所提高;另一种办法是采用加权法降低各个滤波器的副瓣,同样可以提高改善因子.所付出的代价是滤波器的主瓣有所加宽.基于该型号雷达的实际工作参数和较少脉冲数(小于16)的限制,这里采取第二种解决方法.如果多普勒滤波器的设计准则选定,即要求主响应之外的滤波器副瓣响应低于规定值,同时使滤波器响应主瓣宽度最小.那么基于切比雪夫分布的FIR滤波器设计就是最佳方案.多普勒频率范围用一组相邻且部分重叠的切比雪夫加权滤波器覆盖,这样既可以保证将地杂波的大部分滤去,又使得滤波器的主瓣尽可能窄.2.2切比雪夫加权滤波器"切比雪夫逼近"称为等波纹最佳一致逼近.逼近准则是根据滤波器的设计指标,导出一组条件,在此条件下使得整个逼近的频率范围内逼近误差绝对值的最大值为最小.这里我们要设计通带内单调,阻带为等波纹的切比雪夫加权低通滤波器.假设期望滤波器的幅度函数为Ⅳ(),实际逼近的滤波器幅度函数为H(),则加权输逼近误差函数定义为:E()=()[Ⅳ()一Ⅳ()](1)式中(∞)为逼近误差加权函数.当N为偶数时,Ⅳ()一当N为奇数时,图1MTD多普勒滤波器的结构"/Z)cOs[(一号(3)式中N为滤波器阶数.FIR滤波器的等纹逼近优化准则可描述为求一组系数a(,z)或b(n),使其在逼近的各个频带上E()的最大绝对值达到最小.『IE()『I=z[MaxfE()『](4)a(n)orb(月)∈^式中A是逼近的频带,这里主要指阻带.最佳逼近的充要条件是E()在逼近区域中满足交替定理.最优线性相位FIR滤波器的设计即求解优化问题(4)式,用雷米兹(Remez)算法(算法步骤见参考文献[4])来求解这里的等波纹最佳一致逼近问题,求出a(n)或b(n)便可得到滤波器的单位取样响应.(,),即获得基于切比雪夫分布的FIR滤波器加权系数.通过给滤波器系数加一个线性相位项,可将峰值滤波器的频率响应定位于任意位置.实现覆盖多普勒频率范围所需的滤波器总数,在设计时要权衡滤波器交叠期间的跨接损耗和实现中复杂程度之间的得失.而对于FIR滤波器组中的每个滤波器来说,其(幅度)频率响应都要在零频附近有较深的零陷,主要用于抑制地杂波,设计中对低副瓣要求和主瓣展宽之间要折中考虑.该雷达工作在仰角I~t,-j-,近区的地形可能会造成较强的地杂波,所以在零多普勒频率即地杂波所在处对副瓣有更高的要求.3检测处理方法3.1杂波背景下的CFAR检测为抑制运动杂波,对同一距离单元的各滤波器输出取幅度,并采用单独的自适应门限作处理,即杂波背1O2/)/SoC)/^口∑一第1期汪莉君等一种MTD的优化设计及实际应用景下的恒虚警处理.图2所示为滤波器的多路输出各自通过CFAR检测的框图.杂波包络的分布接近瑞利分布,工程中广泛采用单元平均技术,即CA—CFAR(cellaveraging).这里我们采用最大选择GO(greatestof)一CA—CFAR.图3所示为GO—CA—CFAR检测器,主要是为对抗杂波边缘而设计,因为GO在杂波边缘环境中能保持较好的控制虚警性能.它取两个局部估计的较大者作为总的杂波功率水平估计,即0.滤波器输出l滤波器输出N—l滤波器输出Z—MAX(X,y)(5)输入其中x一÷∑,y:÷∑..』…1』i=1在被检测单元两则各选I(一般选8或16)个单元,分别求这I个单元的均值,两者选大后输出,乘以门限因子c作为门限阈值.c由若干位开关和若干位数据组成,开关可使阈值有多种选择,数据可使不同工作方式下的阈值可能不同,以保证不同工作方式下的检测性能最优.被检测单元两侧各空出一个单元是为了避免目标本身对阈值的影响.3,2超杂波检测由于目标信号检测是在运动杂波或地杂波剩余的背景下检测的,零多普勒滤波器即0#滤波器不能滤去地杂波,地杂波背景的分布与雷达周围的地形有关, 但目标也可能存在于0#滤波器中,通过对几次扫描的杂波幅度取平均,建立杂波图,作为零多普勒频率通道的门限,可以检测出超过杂波的强目标回波嘲图4所示为超杂波检测框图.递归滤波器输出作为杂波图中的平均估值,乘以门限因子C形成门限阈CFAR~IL——+IcFAR检澳9l—————..选大CFAR,~YL——'图2MTD多路CFAR检测检测输出图3GO—CA—CFAR检测器图4超杂波检测输出输出值.主监控提供的超杂波检测命令和检测区域决定了C的选取.递归滤波器中Z一指的是天线扫描周期的延迟,在0到1之问选取,决定了取平均的周期数.3.3噪声CFAR检测经过杂波背景下的恒虚警处理之后,在接收机的输白色高斯噪声背景下,检测目标可以采用噪声电平恒虚警电路.因为白色高斯噪声经过幅度检波后变为振幅瑞利分布,所以只需求得其噪声均值,再乘以一个大于1的门限因子作为门限阈值,就可以将虚警概率控制在允许值之下.图5噪声恒虚警电路输出图5中C3为噪声CFAR的门限因子,也由若干位开关和若干数据组成,数据由工作方式中的脉冲数决定,因为脉冲数不同,终端中M/N检测得到的虚警概率也可能不同,所以C.必须分别设置,以保证不NT作方式下虚警概率相同.单元平均电路在每次发射的休止期内取64个噪声数据取平均值,递归滤波是在发射与发射之问进行的,其结构类似于杂波图的建立,只是延迟时间不再是天线扫描周期,而是脉冲发射周期.4测试及性能分析由于该型号雷达工作在多种工作方式下,需要通过选择信号来选中不同工作方式所对应的MTD系统112005年3月火控雷达技术第34卷处理模块,其中包括多普勒滤波器组和各通道检测等.下面就某一种工作方式进行MTD的设计及其检测的仿真.雷达工作波长一0.1m,在该工作方式情况下,脉冲数为9,脉冲重复周期为T,一3300~s,考虑到天线扫描引起的杂波谱展宽,地杂波谱宽约,一10Hz.图6描绘出多普勒滤波器组中1#,6#,8#三个滤波器的频率特性,靠近零多普勒频率的1#滤波器在零频附近形成约一55dB的凹口,未绘出的8#滤波器与1#滤波器的频率特性完全对称.2#~7#滤波器在1#与8#滤波器之间的多普勒频率范围内平均分布,副瓣均可达一55dB以下,能抑制较强的地杂波.图7描绘出MTD滤波器组对地杂波的滤波响应图,对目标能够达到约8dB的增益. ∞3蜃督骚燃罂~\,.1|.i||7IIL图6多普勒滤波器组中三个滤波器的频率响应图7滤波器组对地杂波的频率响应图8所示是雷达参数模拟的数字信号源中一组地杂波背景下含有运动目标的9个回波脉冲经过MTD的8个通道后,由恒虚警检测得到的目标信息;在第128个和第512个距离单元上各有一个运动目标,且均处于1#与2#滤波器之间,并有7.8dB的增益.距离单元图8地杂波背景下检测得到的目标信息图9箔条杂波背景Ttk~,1得到的目标信息图9所示是数字信号源中一组箔条杂波背景下含有运动目标的回波脉冲经过处理得到的目标信息;在第23个距离单元上有一个运动目标,处于8#滤波器,并获得6.2dB的增益.测试结果表明,该MTD系统对地杂波的抑制可达到55dB,对动杂波的抑制可达45dB,滤波器组各个滤波器的改善因子均可达到60dB以上.5结束语本文将基于切比雪夫加权的滤波器应用于某雷达MTD系统,并详细阐述了相关的检测处理方法,包括CFAR检测及超杂波检测.测试结果表明,这种MTD设计及处理方法是切实可行的,能够达到较好的动目标检测效果.(下转第25页)12第1期帅明等机栽PD雷达通用杂波的建模与仿真.;-I口lj图9AMTI处理后的结果图10MTD后的结果图5,6,9,1O给出了该系统的测试结果图.图7给出了本文所产生的主瓣杂波及高度线杂波在频域上的频谱,图8给出了采用的MTI+AMTI的频率响应结果.可以看到图5中在三种杂波作用下,信号被完全淹没,杂信比很大.图6给出了经过匹配滤波,MTI后的结果,滤除了高度线杂波,但杂波仍然很强.图9给出了信号经过AMTI处理,大大降低了主瓣杂波,只剩下了与信号处于一个当量级的副瓣杂波.图1O对AMTI后的结果进行了MTD,从图中可看到,此时信号很明显的被检测到.4结论本文利用目前较通用的几种杂波统计模型形成地形特征数据库,从而利用一定的构造方法,建立了机载条件下的通用杂波模型,能大致满足多种情形下的机载PD雷达仿真要求,且该杂波模型可以根据信号的不同形式建立相应的杂波信号,信号可以设置为线性调频信号,常规脉冲信号,非线性调频信号,相位编码信号等.建立了该通用杂波为以后在SIMUIINK下的雷达系统仿真进行快速建模及方案认证提供了基础,同时该方法也可推广于其它仿真平台.参考文献:[1]丁鹭飞,耿富录.雷达原理(修gT/&)[M].西安:西安电子科技大学出版社,1984.[2]丁鹭飞,张平.雷达系~[M-I.西安:西北电讯工程学院出版社,1984.[3]M.W.朗陆地和海洋的雷达反射特性[M].国防工业出版社1983.[4]R.I.米切尔.雷达系统模拟[M].科学出版社,1982.[5]Statisticalanalysesofmeasuredradargroundclutterdata[J].J.B.BillingsleyA.FarinaIEE ETransactiononAerospaceAndElectronicSystems,1999,35(2).[6]EfficientClosed—formcomputationofairbornepulseDopplerradarclutterJaoJ.K,GogginsW.B[A].NorthernVirginiaSectionandIEEEAESS,IEEEInternationalRadarConference[C]. NewY ork:TheInstituteofElectricalandElectronicsEngineers,Inc,1985,17—22.[7]ModellingOfRadarClutter[M].G.C.Sarno.[8]曹晨等.关于雷达杂波性质研究的若干个问题[J].现代雷达,2001,23(5):1—5. [91胡娅.雷达杂波库的建摸与仿真[c].学位论文,1997.(上接第12页)参考文献:[1]一种新的短脉冲序l雷达信号处理系统口].现代雷达,1998,12,第6期.[2]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,1995,6.[3]赵树杰,史林.数字信号处理[M].西安:西安电子科技大学出版社,1997,10.[4]康晓东主编.数值算法与非数值算法[M].电子工业出版社,2003,1.[5]丁鹭飞,张平.雷达系统[M].西安:西北电讯工程学院出版社,1984.25。
MTD雷达信号处理实现过程简析
MTD雷达信号处理实现过程简析作者:徐卫合赵咏梅来源:《无线互联科技》2014年第05期摘要:动目标检测(MTD,Moving target detection)是现代雷达系统中重要的信号处理技术,采用MTD技术的雷达在当前得到了越来越广泛的应用。
文中介绍了MTI/MTD技术的基本原理,对MTD雷达信号处理的实现方法和一般过程进行了简要的分析,并对某些关键部分的多种实现方法进行了一些比较。
关键词:MTI;MTD;动目标;多普勒滤波器组雷达在探测各种运动目标时几乎都会受到杂波的干扰。
由于运动目标和固定目标、一些缓慢运动的目标如气象杂波,敌方施放的铝箔干扰条、鸟群等产生的回波信号的多普勒频移是不同的,针对此区别采用MTI/MTD技术就可以获得所需的目标信息。
1 MTI/MTD的简介动目标显示(MTI)简单理解就是一种抑制固定杂波或缓慢运动杂波的频域滤波器。
它利用运动目标回波和固定杂波及慢速杂波在频域上的不同,有效抑制杂波而获取目标回波信号。
MTD是为了弥补MTI某些情况下检测能力不够的缺陷,提高在强杂波、弱目标时,依据最佳滤波器理论使用的一种信号处理技术。
在信号处理方面MTD比MTI从下面三个方面进行了改进:⑴采用了更多的数字信号处理技术,改善了滤波器频率特性,更接近于最佳滤波,提高了改善因子;⑵能够检测到强地物杂波中低速运动的目标甚至是处于切向方向飞行的大目标;⑶能够同时抑制平均多普勒频移等于零的固定目标杂波和诸如气象、鸟群等产生的慢动杂波。
2 MTD雷达信号处理系统MTD雷达信号处理系统,简单的说就是在MTI的基础上增加了一组覆盖目标回波多普勒频率的所有可能范围的窄带滤波器。
其基本框图如图1所示。
2.1 MTI的信号处理MTI是基于多普勒频率来区分运动目标回波和地物杂波及慢速杂波干扰的,因而MTI一般包括含有多普勒信息的回波信号的相参处理和进行目标区分时的对消处理这两个基本部分。
⑴多普勒信息的获取是使用I、Q正交双通道相干检波器来实现的。
基于ZP-FFT提高雷达检测性能的仿真分析

Hale Waihona Puke J nT o H o S e g Q h nw n i a eY u uF n uC a g e a
( eerhIstt o If ao ui , aa A rnui l nier gIstt, at ,60 1C i ) R sac tue f no t nF s n N v eoat a E gne n ntu Y na 24 0 ,hn ni m r i o l c i ie i a
理方法 , 主要通过对 目标 回波 的相参 脉冲 串作 准匹配 处理 它
基于以上情况 , 本文提出 了对 F r输入信 号进行零 填充 F ( eo adn ,P 的 Z .F Z r. d i z ) P g PF r方 法, 提 高处 理增 益 值。基 来 于该方法 的系统 原理 图 , 推导 出处 理增 益 的计算 公式 , 比较 了 z .F PF r与 F r F rD F 、F . WT在 不 同频 偏 下的 P G值 , 比较 并 了各 种方 法 的运 算量 。仿 真结 果表 明 , F r F rD 与 F 、 F - WT和 F 1 F rD F l F — WT方法相 比,PF r / z .F 在保持 较低运算 量的 同时 , 在整个频率范 围内均具有更好 的检测 性能。
sras n hr daet lr. os e n i cs , eZ r—adn Z )s p ldt eF rip torcvrpoes ggi ped t o e jcn ft sC ni r gt s ae t eoP d ig( P i a p e t F u eoe r s n an io t a e i di h h i oh n t c i ( G ls f m n not u pt in sP r ua r o F n PF raeg e . o ae i F ,F — WT ( i rt P )otr o—pi m i u ga .G fm lef t F radZ -F vn C mp dwt F r F rD o m n s l o ob h r i r h Ds e c e
和差波束空时处理动目标检测技术
Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 83【关键词】和差波束 动目标检测 主瓣杂波1 DPCA技术DPCA 技术通过对时间和空间信息的利用,在雷达的天线上设置两个相位中心偏移的子天线阵,用来发现目前以及抑制杂波,DPCA 技术的实现方式有两种,分别是机械和电子两种方式。
DPCA 的机械实现方式严格限制了飞机速度和雷达脉冲重复频率之间的关系,在机械式DPCA 中,雷达脉冲重复频率的变化应随着载机的速度而变化,这样能够保障子天线在两个相邻的周期之间的路程是一致的。
飞机对于机械式DPCA 来说,是一个极为不稳定的平台,其对雷达脉冲的重复频率要求较高,因此这项技术的想要变得更加工程化是十分困难的。
电子式DPCA 是作为机械式DPCA 的补充出现的,即和差波束DPCA(ΣΔ-DPCA)能够形成相位补偿信号,对回波信号相位进行补偿,且静止目标前后的两个回波信号差应该为零。
在载机的速度发生变化的同时,只需要对补偿信号的幅度进行调整。
与此同时,需要在脉冲重复频率、载机运动速度以及和差波束天线增益等数据下,进行通常增益系数的调整。
在对消之后,通过FFT 实现相干积累,由此提升杂波抑制和信号增益。
2 STAP技术上述DPCA 技术的实现只需要考虑两个时间采样,因此对于时域的分辨率不高。
在虚警概率不变的状况下,想要实现检测概率的有效提升,机载雷达抑制杂波的能力就需要更强。
STAP 就在这种情况下应运而生,STAP 技术和差波束空时处理动目标检测技术文/霍选科能够对机载相控阵雷达抑制杂波的能力进行有效提升。
STAP 技术研究的开展已经将近30年,在最开始时,STAP 技术研究的重点为载雷达杂波特性以及全空时域最佳检测理论。
在60年代末期,出现了阵列自适应处理的基本思想,在确切知道协方差矩阵和目标信号的情况下,阵列自适应处理的基本思想开始应用于脉冲和阵元采样的两维场之中,相较于传统的空时级联处理,两维联合处理的性能要好得多。
雷达信号处理PPT电子教案-第七讲动目标检测
滤波
抑制噪声和其他干扰信号,提 高信号的信噪比。
混频
将接收到的信号从射频频段转 换到中频或视频频段,便于信
号处理。
自动增益控制
保持信号的相对稳定,防止因 目标距离远近导致的信号幅度
变化。
信号特征提取技术
多普勒频率提取
运动轨迹拟合
根据多普勒效应原理,提取出目标相对于 雷达的运动速度对应的频率信息。
展望
随着技术的不断发展,雷达信号处理将在智能交通、无人驾驶、无人机侦察等 领域发挥越来越重要的作用,动目标检测技术也将迎来更广阔的发展空间和应 用前景。
感谢您的观看
THANKS
人工智能融合
随着人工智能技术的发展,动目标检测将与人工智能技术进一步 融合,提高检测的准确性和实时性。
多传感器融合
利用多传感器融合技术,动目标检测将能够更好地处理复杂环境和 多变情况,提高目标检测的可靠性。
网络化与分布式处理
未来动目标检测技术将朝着网络化和分布式处理方向发展,实现大 规模数据处理和信息共享。
雷达信号处理ppt电子教案第七讲动目标检测
目录
• 引言 • 动目标检测的基本原理 • 动目标检测的雷达信号处理技术 • 动目标检测的实际应用 • 总结与展望
01
引言
课程背景
01
雷达信号处理是现代雷达系统中 的关键技术,动目标检测是其重 要组成部分。
02
随着雷达技术的不断发展,对雷 达信号处理的要求也越来越高, 动目标检测技术也得到了广泛的 应用。
信号接收
雷达接收到回波后, 将其转换为可处理的 电信号。
信号预处理
对接收到的信号进行 放大、滤波等处理, 以提高信号质量。
信号特征提取
战场监视雷达广域GMTI模式关键信号处理方法研究

战场监视雷达广域GMTI模式关键信号处理方法研究战场监视雷达广域GMTI模式关键信号处理方法研究1. 引言战场监视是军事行动中的重要环节之一,有效的战场监视能够提供关键信息帮助军事指挥官做出正确决策。
雷达技术在战场监视中发挥着重要作用,其中广域地面动目标指示(GMTI)模式被广泛应用。
GMTI模式可以区分地表上的移动目标并实时更新它们的位置和速度,从而提供更准确的情报。
2. GMTI模式的核心原理GMTI模式主要基于地面杂波信号和动目标信号之间的差异来实现目标的探测与定位。
在雷达回波的处理中,首先通过距离判别器将回波信号分为地杂波和目标回波两部分;然后,在多个脉冲重复内通过多通道可变延迟线(channelizeddelay lines)将目标和地杂波分开;最后,通过合并多个脉冲的信息来获得目标的位置和速度等参数。
3. GMTI模式关键信号处理方法GMTI模式的关键信号处理方法主要包括以下几个方面。
3.1 杂波抑制杂波抑制是关键信号处理的第一步,因为地表杂波波形和目标波形非常相似,需要通过合适的算法将两者区分开来。
常用的方法包括卷积滤波、非相关处理和自适应探测等。
这些方法通过对回波信号进行处理,去除地杂波的影响,提高目标的可探测性。
3.2 多通道处理多通道处理是GMTI模式的核心步骤之一,通过多通道可变延迟线将地表杂波和目标回波分离。
这样可以通过多个通道的组合,提高目标回波的信噪比,使得目标更容易被探测和定位。
同时,多通道处理也可以减少地杂波的波形变化对目标回波的影响。
3.3 目标检测与跟踪目标检测与跟踪是GMTI模式的最终目标,主要通过跟踪每个时间步长的目标位置和速度,从而获得目标的运动轨迹以及其他参数。
这一步骤通常采用卡尔曼滤波、粒子滤波或扩展卡尔曼滤波等算法来实现。
这些算法可以通过目标的历史信息和测量结果来估计目标的状态。
4. 实验与结果分析为了验证上述关键信号处理方法的有效性,我们进行了一系列实验,并分析了实验结果。
动目标信息包括雷达位置指示
动目标信息包括雷达位置指示动目标显示雷达检测强杂波中的动目标信号的能力虽不如脉冲多普勒雷达,但简单经济,因此获得广泛应用,如用作监视低空的防空雷达、战场监视雷达、机载雷达和用于空中交通管制等。
由于天线波瓣调制、设备不稳定和杂波源扰动等因素,杂波呈现宽齿梳状频谱(齿宽即杂波频谱宽度),经杂波滤波器滤波后仍有杂波剩余。
动目标显示性能越好,杂波剩余越小。
常用的性能指标是动目标显示改善因数,是指杂波滤波器的输出信号杂波比与输入信号杂波比的平均比值。
类似的指标还有杂波对消比、杂波中目标可见度等。
但因均未考虑雷达信号的距离分辨力和天线空间分辨力,不能用来比较两种雷达的性能。
为了提高改善因数,在信号产生、处理、传输各个环节,对信号幅度、频率、相位和延迟稳定性都有严格的要求,如达到60分贝的改善因数,周期间发射信号的均方根相位噪声应小于0.06°。
接收机限幅会展宽杂波频谱,使处理效果受到限制,其损失随对消器级联数的增加而增加,因此要求改善因数高的接收机保持线性特性。
在雷达显示器或其他终端设备上仅显示所需要的动目标的脉冲雷达。
在很多情况下,目标都是运动的,如飞机、导弹等,而在雷达回波中既有所需要的目标回波,也有不需要的物体回波,如地物、云雨、干扰金属箔条的回波(称为杂波)。
大部分杂波源近似于静止,但分布面积大。
因此,杂波可能比目标回波强得多,干扰对目标的观测。
动目标显示雷达具有区别动目标回波与杂波的能力,并能通过杂波滤波器对杂波进行抑制。
区别动目标回波与杂波,有两种基本方法。
一种是根据天线相邻扫描周期间回波的位置变化来区别,但这种方法因难以在强杂波中检测目标信号而很少应用。
另一种方法是根据相邻发射-接收周期的回波的相位变化来区别,即利用目标和杂波源对雷达的不同径向速度所引起的两者回波的多普勒频移的差别。
采取滤波措施滤掉杂波,能在比目标回波强得多的杂波背景中检测动目标回波。
一般的动目标显示雷达都属此类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这 表 明 Tyo alr四相 编码 信 号 的功 率 谱 主要 取
决于子脉冲信号的功率谱 函数 l ( l。 因此 , 旁ቤተ መጻሕፍቲ ባይዱ 瓣 抑制 滤波器 的传递 函数 为 :
= P
-
的编码信号的优选方法。
1
2 频域 旁瓣 抑 制 滤 波 器设 计 理 论
下 面 以 T yo 四相 编 码 信 号 为例 来 说 明频 域 al r
果。
关键词
编码信号 ; 多普勒敏感性 ; 目标检测 动
T 97 5 N 5.1
中 图 分 类号
其 中:
1 引 言
相 位 编码 信 号 的模 糊 函数 为 图钉 形 因而 具 有 距 离分辨 率 和速度分 辨率 高 的优 势 , 具有较 强 的 且 抗 干扰 能力 , 广泛 应用 于低截 获概率 雷达 中 。然 被
( t )=∑
C t ) (一
() 3
0 t ( +1 T 尸 )
则 Tyo 四相 编码 信号 的频 谱 表达式 可写为 : alr
( = ()‘ f / U () () 4
而, 编码信号具有多普勒敏感性 , 将导致雷达对运
动 目标 的检测 性能 的下降 。为此 , 常在实 际雷 达 通 信号处理系统中采用动 目标多普勒频移补偿或者 增 加旁瓣 抑制 滤波器 等措施 来解决 。 在此 , 我们 重点讨论 采 用增加 旁瓣 抑制滤 波器 的方法 。设计 中常 用 的旁 瓣 抑 制 滤波 器 有 线性 规 划法 ( P 、 L )最小 二乘 法 (S 、 L ) 加权 最小 二 乘法 、 频 域设 计法 、 最优峰 值旁瓣 抑 制滤波器 设计 法等 。但 是 , 瓣抑 制滤波 器对 不 同的编码信 号具有 不 同 的 旁 效果 , 本文 主要研 究在频 域旁 瓣抑制 滤波 器设计 中
图中 实 线 对 应 最 优 二 进 制 码 性 能 ( 型 为 码 0 2 1 B 1 7 ) 虚线 为运用 综合 选取 法选 取 的编 x4 2 D 3 , D
() 6
旁瓣抑 制 滤 波 器 设计 的 原 理 。Ty r四相 编 码 信 al o 号 的复包络 可表示 为 :
p
式 中 :K f ./N = Ⅳ K =0 1 … , 一1 ,, N
其 中 为采 样频率 , 为采样 间隔 , N为 F T的长 F 度。 由此 可得 到 传递 函数 的 离散 形 式 。alr四相 T yo 编码 信号频 域脉 压处理 系统框 图 为 :
运 动 目标 而言 , 主副 比提高 了 1 B d。
般 我们 对 编码 信 号 选择 是 按 照信 号 自相 关
函数主 副瓣 比值 最 大 的准 则进 行 的 , 旁瓣 抑制 条件 下 编码信 号优选 是 在 充 分考 虑 到 旁瓣 抑制 滤 波 器 对多普 勒性 能影 响 的基 础上 进行 的 。 方法 为 : 其
( =∑j-  ̄ t )0 t ( + )() t ) s ̄ p 一 () ( kc P 1 1 T
式 中P 为码 长 , 为 固定 的 一1 1C 为编码 相位 , S 或 , Pt ()=CS  ̄/ T 一T t T O (-2 ) t 为具有 半余 弦形 状 的子脉 冲 函数 。 利用 函数 的性质 U t ()可写 为 :
() =P t t ()o t U() () 2
I 处
理器 l l 滤波器 I I 制滤波器I I 处理器 l
郦
’
图 1 T yo 四相 编 码 信 号 频 域 脉 压 处 理 系统 框 图 alr
收稿 日期 : 0 2 7年 4月 1 0 8日, 回 日期 :0 7年 5月 1 修 20 4日
( )信 号损失 比较 , 种方法 信 号损失 相差无 2 两
几。
() 1 在多普勒频率为零的条件下 , 选取旁瓣抑 制滤 波器后 主 副 比较 大 的信 号 构 成集 合 A, { I 即
=I 0 I ma R ( I>a a ( ) / x m) R I }, 为某一 设定
=
l ∽ l:[ 2 c ) s '( —/) P+ ∑X m c 2mf s ] ( o, F 4 n
・
l ∽ l
l ∽ l
() 5
式中X( )= ∑ cC c m
{ m 1 ? ‘ 常。 a m P,一 P :. 一 L :.. 1为 数 《 … K
维普资讯
总第 1 1 6 期 20 07年第 5期
舰 船 电 子 工 程
Shp Elc rni gn e i g i e to c En ie rn
V0 . 7 No 5 12 .
9 6
提 高 动 目标 检 测 能 力 的雷 达编 码 信 号 优选 方 法
周 沫 李 经
406 ) 30 0
( 军 工 程 大 学 电子 工 程 学 院 ” 武 汉 海
40 3 ) ( 装 武 汉 局 武 汉 30 3 海
摘
要 雷达编码信号 因有较高的距离和速度分辨率而具有广泛 的应用前 景 , 但其 固有 的缺 陷 一多普 勒敏感性却制
约 了在雷达中的使用 。实 际雷达系统中通常选取 自相关 函数 主副 比大 的信号 , 而部分 主副 比大 的信号 由于 多普 勒效应影 响了雷达对运动 目标 的检测性能。结合实际应用 , 出一 种提高 动 目标检 测 能力 的雷达编码 信号优 选方法 , 出仿 真结 提 给
维普资讯
20 07年第 5期
舰 船 电 子 工 程
3 旁瓣抑 制下 的编码信 号的优选方法
一
( )脉压增 益 比较 , 1 通过综 合选 取法 选取 的信 号虽 然在 加权前 脉压 增益低 于 传统方 法 , 在距 离 但 旁瓣 抑制 下 , 脉压 增益优 于传 统法 。对 1 其 马赫 的