自航式水上移动平台关键技术
海洋油井平台概述

各类海洋油井平台概述海洋石油钻采设备是海上油气田钻井与采油所用的工具和装备,它的种类繁多包罗万象,但归纳起来大体可以分为四类:1.海洋石油钻井平台;2.海洋石油采油平台;3.水上钻井机械设备;4.水下钻井机械设备。
本文主要介绍前两类,即:海洋石油钻井平台及海洋石油采油平台。
主要分为移动式平台和固定式平台两大类。
其中按结构又可分为:(1)移动式平台:坐底式平台、自升式平台、钻井船、半潜式平台(SEMI)、张力腿式平台(TLP)、牵索塔式平台、浮式生产处理系统(FPSO)、筒状平台(SPAR)。
(2)固定式平台:导管架式平台、混凝土重力式平台、深水顺应塔式平台。
移动式平台坐底式钻井平台坐底式钻井平台又叫钻驳或插桩钻驳,适用于河流和海湾等30米以下的浅水域。
坐底式平台有两个船体,上船体又叫工作甲板,安置生活舱室和设备,通过尾郡开口借助悬臂结构钻井;下部是沉垫,其主要功能是压载以及海底支撑作用,用作钻井的基础。
两个船体间由支撑结构相连。
这种钻井装置在到达作业地点后往沉垫内注水,使其着底。
因此从稳性和结构方面看,作业水深不但有限,而且也受到海底基础(平坦及坚实程度)的制约。
所以这种平台发展缓慢。
然而我国渤海沿岸的胜利油田、大港油田和辽河油田等向海中延伸的浅海海域,潮差大而海底坡度小,对于开发这类浅海区域的石油资源,坐底式平台仍有较大的发展前途。
目前已有几座坐底式平台用于极区,它可加压载坐于海底,然后在平台中央填砂石以防止平台滑移,完成钻井后可排出压载起浮,并移至另一井位。
自升式钻井平台自升式钻井平台被设计成为驳船的模样,具有可以升降的可延伸到海底的桩腿。
虽然有些设计能使其在海深500英尺(152米)的海域工作,但通常用于海深400英尺(122米)的地方,适合于近海。
其移位时平台降至水面,桩腿升起,平台就像驳船,可由拖轮把它拖移到目的地。
到达钻井目的地后,工作时桩腿下放插入海底,平台及平台上所有的钻井设备及其他器械被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷。
海上施工之起重船

引用海上施工之起重船钻井工程技术2009-10-28 11:48:35 阅读341 评论1 字号:大中小引用南沙的海上施工之起重船起重船用于水上起重作业的工程船舶,又称浮吊、浮式起重机,多为非自航式,也有自航式。
船上起重设备有旋转式和固定式。
自航旋转式起重船用于调迁频繁的工地,一般配有副钩,吊杆可以变幅。
固定式起重船一般用于吊重大件货物,配有副钩,起升高度和幅度依作业需要而定。
一般起升高度可达80米,幅度可达30米,可以变幅。
有的吊杆可以放倒,便于拖带。
船舶移位时用绞机移动船体。
“蓝鲸”号7500吨全旋转起重船“蓝鲸”号7500吨级全回转起吊船,全长241米,宽50米,型深20.4米,相当于一个足球场的面积,高度超过7层楼;总吨64110吨,起重吊梁高98.1米,最大起重能力7500吨。
它既可以将吊具深入水下150米,又可以将重物提升到水上125米。
它的一大特点就是起重臂可以放倒或旋转,十分灵活。
由于海上环境瞬息即变,普通的固定臂式起重机因其起重臂不能放倒,遇上恶劣的海况,起重臂常会变形损坏或折断。
7500吨全回转浮吊的诞生,就能自如对付恶劣环境,大大扩展了我国海事工程和求助打捞事业可涉猎的海域。
蓝鲸号起重船也可兼做大型大跨距桥梁预制件吊装、打捞及水上重大件吊装之用。
“蓝鲸”顶点最高130米,相当于40多层楼高,最高起重高度可达110米;整个浮吊船可同时容纳300人食宿作业,并设有直升机停机坪,自航速度达到11个节级。
从设计到制造完成只用了两年半左右的时间,至少有10项独创的技术在“蓝鲸”上实施应用。
7500T全回转浮吊的十大特点一、可自航,航速达11km。
除了除了主推进器外,同时还有艏侧推和艉侧推各一套。
转向灵活。
二、起重机臂架采用了80公斤级高强度钢板焊接的桁架结构,屈服强度为685Mpa。
三、旋转支承采用双层圆筒体结构。
筒体直径35m。
回转支承为四排滚轮式,用耐压橡胶块和精确工使其均匀承载。
[汇总]海洋平台种类
![[汇总]海洋平台种类](https://img.taocdn.com/s3/m/f1615c4cbf23482fb4daa58da0116c175f0e1e9e.png)
海洋平台种类按其结构特性和工作状态可分为固定式、活动式和半固定式三大类。
固定式平台的下部由桩、扩大基脚或其他构造直接支承并固着于海底,按支承情况分为桩基式和重力式两种。
活动式平台浮于水中或支承于海底,能从一井位移至另一井位,接支承情况可分为着底式和浮动式两类。
近年来正在研究新颖的半固定式海洋平台,它既能固定在深水中,又具有可移性,张力腿式平台即属此类。
固定式平台桩基式平台① 导管架型平台。
在软土地基上应用较多的一种桩基平台。
由上部结构(即平台甲板)和基础结构组成。
上部结构一般由上下层平台甲板和层间桁架或立柱构成。
甲板上布置成套钻采装置及辅助工具、动力装置、泥浆循环净化设备、人员的工作、生活设施和直升飞机升降台等。
平台甲板的尺寸由使用工艺确定。
基础结构(即下部结构)包括导管架和桩。
桩支承全部荷载并固定平台位置。
桩数、长度和桩径由海底地质条件及荷载决定。
导管架立柱的直径取决于桩径,其水平支撑的层数根据立柱长细比的要求而定。
在冰块飘流的海区,应尽量在水线区域(潮差段)减少或不设支撑,以免冰块堆积。
对深海平台,还需进行结构动力分析。
结构应有足够的刚度以防止严重振动,保证安全操作。
并应考虑防腐蚀及防海生物附着等问题。
导管架焊接管结点的设计是一个重要问题,有些平台的失事,常由于管结点的破坏而引起。
管结点是一个空间结点,应力分布复杂;近年应用谱分析技术分析管结点的应力,取得较好的结果。
导管架由导管(即立柱)和导管间的水平杆和斜杆焊接组成,钢桩沿导管打入海底。
打桩完毕后,在两者的环形空隙内用水泥浆等胶结材料固结,使桩与导管架形成一个整体,以承受巨大的竖向和水平荷载。
若桩的承载能力不能满足要求时,可在立柱之间和角立柱的周围增设钢桩。
这种平台施工时一般先在陆地上预制导管架,再用驳船拖运就位进行安装,通过调节压舱水使驳船倾斜,然后用卷扬机将导管架送入水中,由其自身浮力悬浮在水中,再向导管架立柱内灌水,同时用起重船把导管架竖立就位于海底井址,再将桩逐段连续打入海底土层固定。
海上自升式平台设计与施工考核试卷

( )
15.海上自升式平台的稳定性分析中需要考虑的力包括:
A.重力
B.浮力
C.波浪力
D.风力
( )
16.以下哪些因素会影响海上自升式平台的使用寿命?
A.材料选择
B.防腐蚀措施
C.定期维护
D.工作环境
( )
17.海上自升式平台施工中,以下哪些做法可以减少对环境的影响?
A.封闭式施工
B.废弃物分类处理
( )
4.以下哪些措施可以增强海上自升式平台的抗风稳定性?
A.增加平台质量
B.使用抗风稳性装置
C.减少平台高度
D.增加平台宽度
( )
5.海上自升式平台施工中,以下哪些设备是必须的?
A.起重设备
B.钻孔设备
C.液压升降设备
D.生活设施
( )
6.以下哪些因素可能导致海上自升式平台发生倾斜?
A.地基不均匀
( )
7.海上自升式平台的抗风能力通常通过_______和结构设计来提高。
( )
8.为了保护海洋环境,海上自升式平台施工过程中应采取_______措施。
( )
9.海上自升式平台的安装精度受到_______和施工技术的影响。
( )
10.海上自升式平台的使用寿命受到_______、维护保养和作业环境等因素的影响。
12.以下哪些设备用于海上自升式平台的地基处理?
A.打桩机
B.钻孔机
C.挖掘机
D.混凝土搅拌站
( )
13.海上自升式平台的升降系统主要由以下哪些部分组成?
A.液压系统
B.钢丝绳
C.导向装置
D.控制系统
( )
14.以下哪些措施可以提高海上自升式平台的工作效率?
基于仿生原理的水上行走机器人基础技术分析
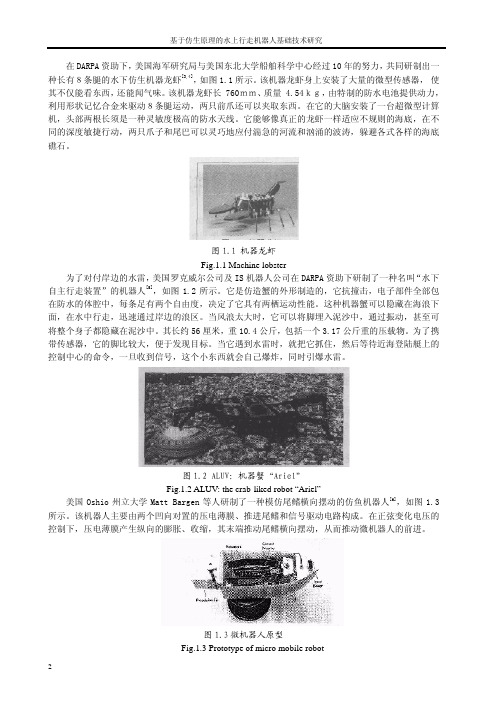
在DARPA资助下,美国海军研究局与美国东北大学船舶科学中心经过10年的努力,共同研制出一种长有8条腿的水下仿生机器龙虾[3,4],如图1.1所示。
该机器龙虾身上安装了大量的微型传感器, 使其不仅能看东西,还能闻气味。
该机器龙虾长 760mm、质量 4.54kg,由特制的防水电池提供动力,利用形状记忆合金来驱动8条腿运动,两只前爪还可以夹取东西。
在它的大脑安装了一台超微型计算机,头部两根长须是一种灵敏度极高的防水天线。
它能够像真正的龙虾一样适应不规则的海底,在不同的深度敏捷行动,两只爪子和尾巴可以灵巧地应付湍急的河流和汹涌的波涛,躲避各式各样的海底礁石。
图1.1 机器龙虾Fig.1.1 Machine lobster为了对付岸边的水雷,美国罗克威尔公司及IS机器人公司在DARPA资助下研制了一种名叫“水下自主行走装置”的机器人[5],如图1.2所示。
它是仿造蟹的外形制造的,它抗撞击,电子部件全部包在防水的体腔中,每条足有两个自由度,决定了它具有两栖运动性能。
这种机器蟹可以隐藏在海浪下面,在水中行走,迅速通过岸边的浪区。
当风浪太大时,它可以将脚埋入泥沙中,通过振动,甚至可将整个身子都隐藏在泥沙中。
其长约56厘米,重10.4公斤,包括一个3.17公斤重的压载物。
为了携带传感器,它的脚比较大,便于发现目标。
当它遇到水雷时,就把它抓住,然后等待近海登陆艇上的控制中心的命令,一旦收到信号,这个小东西就会自己爆炸,同时引爆水雷。
图1.2 ALUV:机器蟹“Ariel”Fig.1.2 ALUV: the crab-liked robot “Ariel”美国Oshio州立大学Matt Bargen等人研制了一种模仿尾鳍横向摆动的仿鱼机器人[6],如图1.3所示。
该机器人主要由两个凹向对置的压电薄膜、推进尾鳍和信号驱动电路构成。
在正弦变化电压的控制下,压电薄膜产生纵向的膨胀、收缩,其末端推动尾鳍横向摆动,从而推动微机器人的前进。
(内规)三类
小型公务船驾驶培训理论复习题《内河避碰》1《内河避碰规则》的作用是:( C )A. 在船舶碰撞发生前是船舶避碰行动的指南B. 在船舶碰撞事故发生后是判定碰撞责任的依据C. A+B2《内河避碰规则》具有( C )性质。
A. 技术性B. 法律性C. A+B3《内河避碰规则》的宗旨不包括( C )A. 维护水上交通秩序B. 防止碰撞事故C. 便于处理水上交通事故4《内河避碰规则》的法律性体现在(B )。
A. 在船舶碰撞发生前是船舶避碰行动的指南B. 在船舶碰撞事故发生后是判定事故责任的依据C. 在行动中要按规定去执行5内河避碰规则》的技术性体现在( A )。
A. 在船舶碰撞发生前是船舶避碰行动的指南B. 在船舶碰撞事故发生后是判定事故责任的依据C. 在行动中灵活遵守规则6船舶、排筏在国境河流、湖泊航行、停泊、作业,仍可参照《内河避碰规则》执行。
( B )A. 正确B. 错误7在中华人民共和国境内江河、湖泊、水库、运河等通航水域及其港口航行、停泊和作业的外籍船舶不一定遵守《内河避碰规则》。
(B )A. 正确B. 错误8《内河避碰规则》适用于我国境内( B )等通航水域及其港口航行、停泊和作业的一切船舶、排筏。
①江河②湖泊③水库④运河⑤沿海⑥国境河流、湖泊A. ①~③B. ①~④C. ①~⑥9 下列哪一种对象不适用于《内河避碰规则》?(A )A. 航行在国境河流的内河船B. 航行在内河的海船C. 航行在中国境内水域的海巡艇10下列哪一种船舶适用于《内河避碰规则》? ( C )A. 监督艇B. 从事捕鱼的船舶C. 以上都是11《内河避碰规则》适用的水域是指:( B )A. 船舶能够到达的一切水域B. 中华人民共和国境内江河、湖泊、水库、运河等通航水域及其港口C. 可供内河船舶航行的一切水域12《内河避碰规则》适用的水域包括:( C )A. 国境河流、湖泊B. 与中俄国境河流相通的水域C. 中华人民共和国境内的平流区域13《内河避碰规则》适用的水域不包括( C )。
海洋平台结构振动控制

2023-12-02CATALOGUE目录•海洋平台结构概述•振动控制理论•海洋平台结构振动分析•海洋平台结构振动控制设计•海洋平台结构振动控制实验及结果分析•结论与展望海洋平台结构概述01包括重力式、桩基式、张力腿式等,主要通过基础固定在海底。
固定式海洋平台浮式海洋平台新型海洋平台包括半潜式、张力腿式、Spar式等,主要通过浮力支持并固定在海面上。
包括自升式、锚链式等,结合了固定式和浮式平台的特点。
030201用于制造平台的主体结构,如钢柱、钢梁等。
钢材用于制造平台的底座和基础,具有较好的抗风浪性能。
混凝土如玻璃纤维、碳纤维等,用于制造平台的上层结构和辅助结构,具有轻质高强的特点。
复合材料海洋平台结构复杂,尺度较大,需要考虑风浪、地震等自然因素的影响。
大尺度海洋平台需要承受较大的外力,如风、浪、流等,同时还需要承受海底地质条件的影响。
高要求海洋平台结构设计涉及结构力学、材料科学、地质工程、海洋工程等多个学科领域。
多学科性振动控制理论02振动的分类按频率分为低频振动和高频振动。
振动的定义物体围绕平衡位置进行的往返运动。
振动的危害结构疲劳、设备损坏、人员不适等。
振动原理通过优化结构设计,降低结构的固有频率,避免与外力频率匹配。
减震设计通过增加隔震支座或隔震沟等,切断地震波的传播路径。
隔震设计通过增加阻尼材料或阻尼器等,吸收和消耗地震能量。
消震设计振动控制策略通过传感器监测地震动,计算机系统实时调整支撑刚度或阻尼,抑制地震反应。
主动隔震通过传感器监测结构振动,计算机系统实时调整结构阻尼,抑制结构振动。
主动阻尼振动主动控制技术振动被动控制技术被动隔震通过增加隔震沟、隔震支座等,切断地震波的传播路径。
被动阻尼通过增加阻尼材料、阻尼器等,吸收和消耗地震能量。
海洋平台结构振动分析03确定平台结构的固有振动特性,包括固有频率和模态形状。
分析不同振型下平台结构的响应,为振动控制提供参考。
考虑平台结构在不同海域、不同环境条件下的固有振动特性变化。
船舶概论第五章:海洋平台设计(海洋平台介绍)

FPSO
FPSO
FPSO
FPSO的主要功能有:
原油生产和污水处理
在FPSO主甲板以上,可根据生产工艺的要求设置 生产甲板。生产甲板就相当于一座陆地处理厂,在 生产甲板上设置油气生产和污水处理所不可缺少的 设备,如加热器、分离器、冷却器、污水脱油装置 、压缩机、输送泵、安全放空装置等,以及为生产 需要的其它配套设施。处理合格的原油进舱储存; 处理达标的生产污水直接排海或作为油田注水的水 源;分离出来的天然气作为发电机和加热锅炉的燃 料,或输送到陆地供客户使用。
各种平台的特点(续9)
3、张力腿式平台
张力腿式平台是利用绷紧状态下的锚索链产生的拉力与平台的剩余 浮力相平衡的钻井平台或生产平台。一般来说,半潜式平台的锚泊定位 系统,都是利用锚索的悬垂曲线的位能变化来吸收平台在波浪中动能的 变化。悬垂曲线链的特征之一是链的下端必须与水底相切,以保证锚柄 不会从水底抬起,这样就可保证锚的抓力。张力腿式平台也是采用锚泊 定位的,但与一般半潜式平台不同,其所用锚索是绷紧成直线的,不是 且悬垂曲线的,钢索的下端与水底不是相切的,而是几乎垂直的。用的 锚是桩锚(即打入水底的桩作为锚用),或重力式锚(重块)等,不是 一般容易起放的转爪锚。张力腿式平台的重力小于浮力,所相差的力可 依靠锚索向下的拉力来补偿,且此拉力应大于波浪产生的力,使锚索上 经常有向下的拉力,起着绷紧平台的作用。
FPSO本身就是一艘大型的船舶,可以有舵,能 自航,也可以无舵,靠拖航就位。该装置通过 固定式单点或悬链式单点系泊系统固定在海上 ,可随风浪和水流的作用360°全方位地自由 旋转。
FPSO
FPSO通常与采油平台或海底采油系统组 成一个完整的采油、原油处理、储油和 卸油系统。
工作原理:通过海底输油管线接受从海 底油井中采出的原油,并在船上进行处 理,然后储存在货油舱内,最后通过卸 载系统输往穿梭油轮(Shuttle Tanker)。
中华人民共和国内河避碰规则
中华人民共和国内河避碰规则(1991年4月28日交通部令第30号,2003年9月2日交海发[2003]357号修订)第一章总则第一条宗旨为维护水上交通秩序,防止碰撞事故,保障人民生命、财产的安全,制定本规则。
第二条适用范围在中华人民共和国境内江河、湖泊、水库、运河等通航水域及其港口航行、停泊和作业的一切船舶、排筏均应当遵守本规则。
船舶、排筏在国境河流、湖泊航行、停泊和作业,按照中国政府同相邻国家政府签有的协议或者协定执行。
船舶、排筏在与中俄国境河流相通的水域航行、停泊和作业不适用本规则。
第三条责任船舶、排筏及其所有人、经营人以及船员应当对遵守本规则的疏忽而产生的后果以及对船员通常做法所要求的或者当时特殊情况要求的任何戒备上的疏忽而产生的后果负责。
不论由于何种原因,两船已逼近或者已处于紧迫局面时,任何一船都应当果断地采取最有助于避碰的行动,包括在紧迫危险时而背离本规则,以挽救危局。
不论由于何种原因,在长江上航行的客渡船必须避让顺航道行驶的船舶。
第四条特别规定本规则授权各省、自治区、自辖市海事机构,长江、黑龙江海事局及辖区内有内河的沿海海事机构根据辖区具体情况,制定包括分道通航等有关交通管制在内的特别规定,报交通部批准后生效。
第五条定义本规则下列用语的含义是:(一)"船舶"是指各种船艇、移动式平台、水上飞机和其他水上运输工具,但不包括排筏。
(二)"机动船"是指用机器推动的船舶。
(三)"非自航船"是指驳船、囤船等本身没有动力推动的船舶。
(四)"帆船"是指任何正在驶帆的船舶,包括装有推进器而不在使用者。
(五)"拖船"是指从事吊拖或者顶推(包括旁拖)的任何机动船。
(六)"船队"是指由拖船和被吊拖、顶推的船舶、排筏或者其他物体编成的组合体。
(七)"快速船"是指静水时速为35公里以上的船舶。
水上作业安全技术措施

精心整理水上作业安全技术措施1、基本规定1.1、在通航航道内从事疏浚、吹填作业;应在开工前与航政管理(海事)部门取得联系,及时申请并发布航道施工公告。
1.2、施工船舶取得合法的船舶证书和适航证书,并获得安全签证。
1.31.41.51.61.71.81.91.101.111.12随时注意过往船只航行安全,需要时应请航政部门进行水下交通管制。
1.13、同一施工区内有两艘以上挖泥船同时作业时。
船体、管线彼此应保持住足够的安全距离。
1.14、沿海和近海施工作业,应联系当地气象部门的气象服务;随时掌握风浪、潮涌、暴雨、浓雾的动向,提前采取防范措施;风力大于6级或浪高大于1.0m时,非自航船应停止作业,就地避雨;暴雨、浓雾天气应停止机动船作业。
1.15、施工船舶在施工期间还应遵守下列规定:①船上配置功率足够的无线电通信设备,并保持其④⑤⑥⑦⑧技术状态良好。
②机舱内严禁带入火种,排气管等高温区域严禁放置易燃易爆物品。
在无安全监护条件下,不应在船上进行任何形式的明火作业。
③施工船舶的工作平台、行走平台及台阶周围的护栏应完整;行走跳板要搭设牢固,并设有防滑条;各类缆绳应保持完好、清洁。
④备用发电机组、应急空压机、应急水泵、应急出口、应急电瓶等应处于完好状态,每周至少检查一次,并将检查结果记入船舶轮机日志;一旦发现问题应及时报告、处理。
22.12.22.32.42.5人员落水等不良事故发生。
2.6、水陆接头连接应搭设固定排架或抛设固定锚缆或构筑固定地垅,固定排架坡度不宜大于30°,水上管与陆地管质检用大于¢22mm的钢丝绳连接锁定,让防风浪袭击或船舶碰撞时脱开。
2.7、船体与浮管、浮管与水陆接头及岸管的连接那个应牢固无泄漏,以免造成管线脱开、浮筒(体)窜位、翻转造成事故。
3、施工设备调遣3.1、船舶封舱及加班以上设备固定应遵守下列规定:①全船各舱室门窗应不变形,水密胶条完好,门窗把手、锁具灵活而不松动,舱内所有可移动物品应集中摆放并加以固定。
海洋平台-30题答案
海洋平台-30题答案(总8页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--红字的为待完善或不确定的1.海洋平台按运动方式分为哪几类列举各类型平台的代表固定式平台导管架平台活动式平台着底式平台(坐底式平台、自升式平台)漂浮式平台(半潜式平台、钻井船)。
半固定式平台牵索塔式平台(Spar):张力腿式平台( TLP):2.海洋平台有哪些类型各有哪些优缺点固定式平台优点:整体稳定性好,刚度较大,受季节和气候的影响较小,抗风暴的能力强缺点:机动性能差, 较难移位重复使用活动式平台优点:机动性能好缺点:整体稳定性较差,对地基及环境条件有要求半固定式平台优点:适应水深大,优势明显缺点:较多技术问题有待解决3.设计半潜式平台的关键技术有哪些总体设计技术、系统集成技术、钻井系统集成与钻井设备技术、平台定位技术、结构强度与疲劳寿命分析技术、平台制造技术等。
(深水半潜式)4.设计SPAR平台的关键技术有哪些目前对Spar平台的研究主要集中在平台动力响应、系泊系统、疲劳分析、垂荡板和侧板的设计研究以及平台主体与系泊系统、平台构件之间的相互作用的耦合分析,同时,浮力罐与支架间的碰撞问题近年来也成为研究的热点问题之一5.海洋平台的设计载荷分为哪三类各类载荷的定义使用荷载:平台安装后,在整个使用期间,平台受到的除环境荷载以外的各种荷载。
环境荷载:由海洋的风、波浪、海流、海冰和地震等水文和气象要素在海洋平台上引起的荷载。
施工荷载:平台在施工期间所受到的荷载,是发生在建造、装船、运输、下水、安装等阶段的暂时性荷载。
6.在导管架平台建造过程中常见的施工措施有哪些吊装力:平台预制和安装过程中对平台组件的起吊力。
装船力:直接吊装&滑移装船,强度&稳性校核。
运输力:驳船装运&浮运,支撑力&拖航力。
下水力和扶正力:导管架平台安装。
安装期地基反力:地基的支撑力。
7.在海洋平台服役的过程中使有载荷有哪些同下8.试分析活动载荷和固定载荷有哪些固定荷载:作用在平台上的不变荷载,当水位一定时荷载为一定值。
水下机器人百度百科
水下机器人编辑水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。
水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
无人遥控潜水器主要有,有缆遥控潜水器和无缆遥控潜水器两种,其中有缆避控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
中文名水下机器人时间1953年性质水面设备属性水下运动和作业目录1发展历程▪第一阶段▪第二阶段▪第三阶段2结构功能3应用领域▪安全搜救▪管道检查▪科研教学▪水下娱乐▪能源产业▪考古▪渔业4优缺点▪优点▪缺点5国际发展▪美国▪日本▪欧洲▪中国1发展历程编辑第一阶段从1953年至1974年为第一阶段,主要进行潜水器的研制和早期的开发工作。
先后研制出20多艘潜水器。
其中美国的CURV系统在西班牙海成功地回收一枚氢弹,引起世界各国的重视。
[1]1953年第一艘无人遥控潜水器问世,到1974年的20年里,全世界共研制了20艘无人遥控潜水器。
特别是1974年以后,由于海洋油气业的迅速发展,无人遥控潜水器也得到飞速发展。
第二阶段无人有缆潜水器的研制80年代进入了较快的发展时期。
1975至1985年是遥控潜水器大发展时期。
到1981年,无人遥控潜水器发展到了400余艘,其中90%以上是直接;或间接为海洋石油开采业服务的。
海洋石油和天然气开发的需要,推动了潜水器理论和应用的研究,潜水器的数量和种类都有显著地增长。
载人潜水器和无人遥控潜水器(包括有缆遥控潜水器、水底爬行潜水器、拖航潜水器、无缆潜水器)在海洋调查、海洋石油开发、救捞等方面发挥了较大的作用。
第三阶段1985年,潜水器又进入一个新的发展时期。
80年代以来,中国也开展了水下机器人的研究和开发,研制出美国的鱼雷型机器人“海人”1号(HR-1)水下机器人,成功地进行水下实验。
[2] 1988年,无人遥控潜水器又得到长足发展,猛增到958艘,比1981年增加了110%。
[3]这个时期增加的潜水器多数为有缆遥控潜水器,大约为800艘上下,其中420余艘是直接为海上池气开采用的。
移动式钻井平台的介绍
移动式海上钻井平台介绍及新技术的运用一,概述海洋占地球表面积70. 9%,平均深度约为3 730 m, 90%以上的水深为200 m~6 000 m,大量海域面积的资源尚待开发,尤其是石油、天然气等重要经济、战略物资。
据地质学家预测,海底石油天然气总储量约2 500亿吨。
我国是一个海洋大国,在约300万平方公里的海洋辖域内蕴藏着丰富的石油和其它重要资源。
加强开发我国海底石油资源对我国的经济发展有着十分重要的意义。
这就需要一批适合我国海洋石油开采的装备,所以首先对海上石油开采装备,即海上钻井平台进行初步了解显得很必要。
二,平台类型介绍在海上油田的勘探开发过程中,不论是在勘探阶段钻勘探井,还是在开发阶段钻生产井,均要在海上石油钻井平台上进行作业。
海上石油钻井平台大体上可分为固定式和移动式两大类。
固定式钻井装置包括:桩基(导管架)式平台和重力式平台,用于深水作业的顺应式平台,如牵索(绷绳)塔式平台、张力腿式平台、浮力塔式平台;用于浅水作业的人工岛。
移动式钻井装置包括坐底式钻井平台、自升式钻井平台、半潜式钻井平台、钻井船、张力腿式平台和牵索塔式平台。
鉴于我国的海上石油钻井平台大多采用移动式平台,所以重点对各种移动式平台的特点进行探讨。
1,坐底式钻井平台是一种由沉垫(浮箱)、立柱、上层平台(甲板)和抗滑桩等部分组成的移动式平台。
坐底式钻井平台工作时,先由拖轮将其拖至井位,然后灌水下沉,沉垫坐底后,打好抗滑桩,就可钻井作业。
由于坐底式平台甲板高度固定,其工作水深较浅(一般为5m到30m),因而适宜在极浅海区打探井。
这种平台钻垫坐在海底,只要海底土壤密实、平坦无严重冲刷,是比较稳定的,另外平台上设有抗滑桩,可提高平台的坐底稳定性。
坐底式钻井平台的优点是能提供稳定的钻井场地,移动性能好,而且改装后可作为采油平台、储油平台、生活与动力平台等。
缺点是上层平台高度固定,不能调节,工作水深有限;拖航时阻力大;当海底冲刷严重时,钻井易移位,需要采取防滑移、防冲刷及防淘空等措施。
水工建筑的四大类
水工建筑的四大类水工工程施工的主要特点水工工程的施工大部分在水下开展,特别是水下根底,是水工工程构造的主要组成部分。
水下作业技术难度大,专业性强;水上作业时投入的施工船舶、机械较多,工作面狭窄;水工工程一般受风浪、水流、水位、潮汐等自然条件的影响较多,条件比较艰辛。
针对这些特点,必须采取措施尽量减少这些因素对施工进度、质量、安全控制的不利影响。
这些措施大致有:1、变水下作业为陆地作业。
2、提高机械作业化程度,采用装配式及浮运构造,并提高预制装配能力。
如500t的起重船、能打80m长桩的打桩船、离岸开展混凝土生产的水上混凝土工厂,能在恶劣的自然条件下开展多种作业的海上自升施工平台、外伸15Om大型挖泥船,举力3000t的抬送沉箱下水的浮坞等。
3、发展深基大跨构造,研制全天候大型新型的水上施工机械;4、采用新工艺、新材料、新方法、科学地组织施工等。
水工工程种类水工建筑工程主要包括码头、船台、船坞、滑道、防坡堤、护岸、船闸、泵房等工程。
一、码头码头是供船舶靠、停泊、货物装卸和旅客上下等作业。
是水运港口中主要水工建筑之一。
1、码头的组成部分码头由主体构造和附属设备两部分组成。
主体构造又分为:上部构造和下部构造。
上部构造,如:重力式码头的胸墙,板桩码头的帽梁,高桩码头的梁、板和靠船构件等。
其作用除将上部构造和构件连成整体承受上部负荷之外,还装有护木、系船柱、管沟、轨道等设备。
下部构造,如:重力式码头的墙身和根底,板桩码头的板桩,高桩码头的桩基等,主要是挡土或传力用的。
码头设备包括系船设备(如系船柱)、防冲设备(如护木)、安全设备(如系网环)、工艺设备(如管沟和起重机轨道和火车轨道的根底)和路面等。
码头的前沿线是港口水域和陆域的交接线,码头的布置有与岸线平行和与岸线垂直或斜交的形式,前者称为顺岸码头,后者称为突堤码头。
码头线长度决定于所要求的泊位数多少和每个泊位的长度则随船舶的吨位和船舶类型变化而变化,码头前的港池水深由船舶吃水及富裕深度决定。
2009年海上移动式钻井平台构造和设备规则
第A.1023(26)号决议2009年12月2日通过(议程第10项)2009年海上移动式钻井平台构造和设备规则(2009年MODU 规则)大会,忆及国际海事组织公约有关大会关于海上安全规则和指南方面职责的第28(b)条, 注意到海上移动式钻井平台继续在国际间移动和作业,认识到此类装置的设计衡准往往与常规船舶有很大不同;因此,对海上移动式钻井平台不能适用诸如经修订的《1974年国际海上人命安全公约》和经修订的《1966年国际载重线公约》等国际公约,忆及在1979年以第A.414(XI)号决议通过《海上移动式钻井平台构造和设备规则(MODU 规则)》时已认识到,海上移动式钻井平台的设计技术正在迅速发展,将会应用海上移动式钻井平台的新特点来改进技术和安全标准,还忆及数起MODU 的悲剧性事故突出了复审本组织制定的国际安全标准的必要性,因此以第A.649(16)号决议通过了《1989年海上移动式钻井平台构造和设备规则(MODU 规则)》,取代了《1979年MODU 规则》,注意到自《1989年MODU 规则》通过以后,ICAO 通过了《国际民用航空公约》的修正案,这些修正案影响到《1989年MODU 规则》中直升机设施的规定,而且本组织也通过了许多在《1989年MODU 规则》中所参照的《安全公约》条文的修正案,审议了海上安全委员会在第86届会议上提出的建议,1 通过了《2009年海上移动式钻井平台构造和设备规则(2009年MODU 规则)》,载于本决议的附件中;该规则将取代第A.649(16)号决议通过的原《1989年MODU 规则》,适用于2012年1月1日或以后铺设龙骨或处于类似建造阶段的海上移动式钻井平台; 大会 第26届会议 议程第10项A 26/Res.102318 January 2010CHINESEOriginal :ENGLISHA 26/Res.1023 - 2 -2 请各有关政府:(a) 采取适当行动实施《2009年MODU规则》;(b) 就海上移动式钻井平台而言,将该规则视为前言第3段中所述公约的技术要求的等效规定;并且(c) 将其在这方面采取的行动通知本组织;3 授权海上安全委员会考虑到设计和技术的发展,并与有关组织协商,适当时对《2009年MODU规则》进行修订。
水上作业安全技术操作规程汇编(3篇范文)

水上作业安全技术操作规程汇编(3篇范文)第1篇水上作业安全技术操作规程一、水上施工的人员防护。
进入施工现场必须戴好安全帽和其它个人劳动保护用品,另还应配备好救生圈及救生衣。
二、水上施工设备。
在水面上进行打桩,安装等工作时,要备有救生圈,个人要穿救生衣。
必要时要与有关部门协商进行断航施工。
并派人员在一定距离(300米)进行交通管理。
三、工作平台。
平台的四周要设栏杆和安全网,足板要搭设牢固,并要订防滑条。
四、交通渡船。
严格执行国家的有关规定,不得超载一人,乘船人员要听从指挥,不得争先恐后,嬉戏打闹。
五、夜间照明和信号设施。
工作用的码头,船只,浮吊,浮式拌和船及工作平台夜间施工必须配足灯光照明,工程开工前应按规定设置和显示信号并派人值班,确保水上交通安全。
六、浮吊,浮式拌和船,要按规定配专业人员负责管理,以防发生碰撞,搁浅,浮箱禁止漏水。
七、安装船停靠后,应系好丝绳,在潮水河应注意涨潮,退潮的防护措施,在船舶的侧面应挂好靠球。
八、参观观察人员防护,水上作业时未经允许谢绝外来单位参观,经批准的参观人员必须戴好安全帽,禁止有与水上工作无关的人员到水上工作区参观、游玩。
第2篇水上作业施工安全操作规程1、应及时了解当地气象、水文、地质等情况,掌握施工区域附近的桥梁、隧道、大坝、架空高压线、水下管线、取水泵房、危险品库、水产品养殖区以及避风锚地、水上应急救援资源等情况。
2、开工前,应根据施工需要设置安全作业区,并办理水上水下施工作业许可证,发布航行通告。
3、水上作业人员应正确穿戴救生衣等个人安全防护用品。
4 工程船舶必须持有效的船检证书,船员必须持有与其岗位相适应的适任证书,船员配置必须满足最低安全配员要求。
5 工程船舶应按规定配备有效的消防、救生、堵漏和油污应急设施,制定安全技术措施和应急预案,并应按规定定期演练。
施工船舶应安装船舶定位设备,保证有效的船岸联系。
6 工程船舶甲板、通道和作业场所应根据需要设有防滑装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
固定平 台大都建 在近 岸浅水 中 ,主要 有 围堰筑 岛法 、 伐式 、木笼基脚式 、桩基式平 台等 4种 。 1 围堰筑 岛法一 般适应 在 1 以 内水深 ,流速 不 大 ) m 的江河 浅水 区或 浅海潮汐 区域及水 塘 中。可 由草袋 围堰 、 枕木垛 、筑岛等方 式建 平台。 2 伐式平 台适 应水深 在 5m 以 内、水 流平缓 的水 域 ) 或有一定水 深的湖泊 、滩地上 ,采用竹 、木 、废弃油桶 等
摘 要 :重点论述了 自航式水上移动平台的特点及 发展方向 ,并 围绕一 系列关键技术进行了研究 ,所取得 的技术 成
果 可供我 国各行业水上工程勘探时参考。 关键词 :自航式 ;移动平 台;水上勘探 ;锚泊 中图分类 号:T 2 1 V2. 2 文献标 志码 :A 文章编号 :10 — 6 8( 0 20 —0 9 0 0 3 38 2 1 )3 0 1— 3
0 引 言
易发 生摇 晃 、抖动 ,影 响取 土 ( 取芯)质量 ,导致标准贯 入试 验击 数失真和岩芯脱落 ,严重时导致钻 杆断裂 、钻具 损坏 以及船舶走锚等安 全事 故 。为此 ,各 种形式 的水 上 勘探平台应运而生。
11 固定 式 勘 探 平 台 .
随着我 国经 济的高速发展 ,跨 海大桥 、港 口码 头及沿 海各类 基础设施等建设工程均 涉及 到水上勘探 ,这些工程 的建设 为地质勘探行业的发展 提出 了新 的机 遇和挑战 。水 上勘 探主要是指在沿海 、江河 、湖泊等 区域进行 的钻孔工 作 ,其 中海 域 和江河上 勘探 施 工难 度较 大 ,江河 水 流湍 急 ,海 上潮差大 ,风浪 、涌浪 多变 ,为此 ,对稳 泊 ,从而进 行水上 勘探 、取 样 ,查明地层分 布 、地质构造 、岩体的风 化 程度 、岩土的物理力学性质 等 ,无 疑对水 上勘 探平 台及 相关 技术提 出了更高 、更严格 的要求 。 目前 ,国内外水上工程勘 探存在着两 大主要矛盾 :工 程 勘探合 同费用偏 低 ;勘探 作业受 自然环 境制 约 。因此 , 加快 水上勘探技术 的研究 ,开发一种低 成本 、高 效率 的移 动平 台系统 及相关技术是 关键【 一。本文重点介 绍 自航式水
捆扎拼装而成 。
3 木笼基 脚式 平 台适 应水深 在 3m 以内 ,用 数根 圆 ) 木打 入水下并 入土一定 深度 ,用 竹片或柳 条 编织成 筏笼 ,
再 用 卵 、碎 石 ,外 围 大 石 块 ,形 成 木 笼 基 脚 ,上 面放 置 方 木 ,铺 设 木 板 形 成 平 台 。
Ab t a t T i a e il i t d c s h fa u e a d d v lp n i ci n f s l p o e ld s r c : h s p p r man y n r u e t e e t r n e eo i g d r t o ef- r p l mo e b e p a o ms o e o e v a l lt r , f
目前在浅海潮汐 区域 、江河水域 中常用 勘探船实施钻 探 。在水深流急 、流 向多变 、浪高等情况下 进行水上勘探 作业 ,受风 、浪 、流 等各 方面条件 限制 ,勘探过程 中钻 杆
4 桩基式 平 台是借助 导管架 固定在 水底而 高 出水 面 ) 不再移动 的装 置 ,支撑固定平 台的桩腿 直接打人水下 ,并 入土一定深度 ,平 台上面铺设 甲板用于放置钻 机等设备 。 固定 式勘 探 平 台 的稳 定性 好 ,但 因平 台体 积 较 大 、 移 动困难 、重复利用 率低 ,易受潮汐 涨落 、流速等 影响 ,
f r e mo e ar s a c n a s r s o e e h oo y i c ri d a d t e a h e e n sc n p o i e r f rn e o e d i i g u t r r e e r h o e e fk y t c n lg s a re , n h c iv me t a r v d e ee c sf rt r l h i h ln
Ke c n l g o ef r p l d M a ii e M o e b e P a f r y Te h o o y f r S l-p o el rt e m v a l l to m
NI in dn , HU in p n U Ja - i g Ja — ig ( C CT i ro o sl ns o,Ld,S ag a 2 0 3 ,C ia C C hr Ha r nut tC . t. hnh i 00 2 hn ) d b C a
2 1 年 6月 02
中国强湾建设
C iaHab u n ie r g hn r o r gn ei E n
J n, 0 2 u .2 1
To M 1 0。 .3 t 8 No
第 3 期 总第 10期 8
自航 式水上移 动平 台关键 技术
钮 建定 ,胡建平
( 中交第三航务工程勘察设 计院有限公司 ,上海 2 0 3 0 0 2)
o a e w y fv r u n u t e n C ia n w t r a so a o si d sr si h n . i i Ke r s s l p o e e ; mo e b e pa o m ;d l n n w tr a s a c o a e y wo d : e - r p l d f l v a l lt r f i r i g o a e y ; n h rg w