基于S3C44B0X微处理器税控收款机系统的设计
第五章 基于S3C44B0X的嵌入式系统应用开发实例

S3C44B0X复位后的存储器地址分配如下图:
从S3C44B0X复位后的存储器地址分配图可以看 出:
特殊功能寄存器位于0x01C00000到0x02000000的4M
空间内; Bank0-Bank5的起始地址和空间大小都是固定的; Bank6的起始地址是固定的,空间可以配置为 2/4/8/16/32M。 Bank7的空间大小和Bank6一样是可变的,也可以配置 为2/4/8/16/32M。 Bank7的起始地址是可变的。 如果同时使用Bank6/Bank7,则要求连接相同容量的 存储器,而且地址空间在物理上是连续的。
Bank1:上接非线性Flash,当做系统硬盘使
用,可以构造文件系统,存放海量数据。(推 荐使用)
Bank6:SDRAM,起始地址为
0xC000000。
5.2.3 S3C44B0X存储控制器相关引 脚
和存储器相关的引脚的配置: Bank0---NGCS0 用来选通启动存储器。启动存储 器在开机复位后,就应正常工作,因此由引脚设置。
其他存储体的总线宽度只能在系统复位后由程序进行设定, 由地址为0x01c8000的特殊寄存器BWSCON的相应位决定。
关于存储器引脚的配置
例:
S3C44B0X ADDR20~1 OM0 OM1 DATA15~0 nGCS0 nOE nWE
SST39VF160 A19~0 DQ15~0 nCE nOE nWE
只要将CPU上的相应Bank连线(nGCS[7:0])接到外 设芯片的片选引脚上, 便可以根据相应的地址进行存储器 或外设操作。
Bank0:通常,使用Bank0上的NOR
Flash放置系统BootLoader ,系统上电后, PC指针自动指向Bank0的第一个单元,开始 进行系统自举(运行系统初始化程序 BootLoader)。系统自举完成后,便从硬盘 中将系统文件和用户应用程序复制到 SDRAM内存中执行。
基于嵌入式S3C44B0X的家居智能控制系统设计

cnrlhpadp OSIa ean s m fneie tyt o h meB s e, to r e ouin r et o t i n C - s p rt gs t o itlgn s m f o . ei sip r dt l o o c oc I o i ye l s e d t u f wa h s t p j
收稿 日期 : 0 7 0 — 7 2 0- 5 2 作者 简介:杨连沁 ( 9 9 ) 1 7- ,男,山西 长治人 , 士研 究生 , 究 硕 研
方向 为信息工程与控 制。
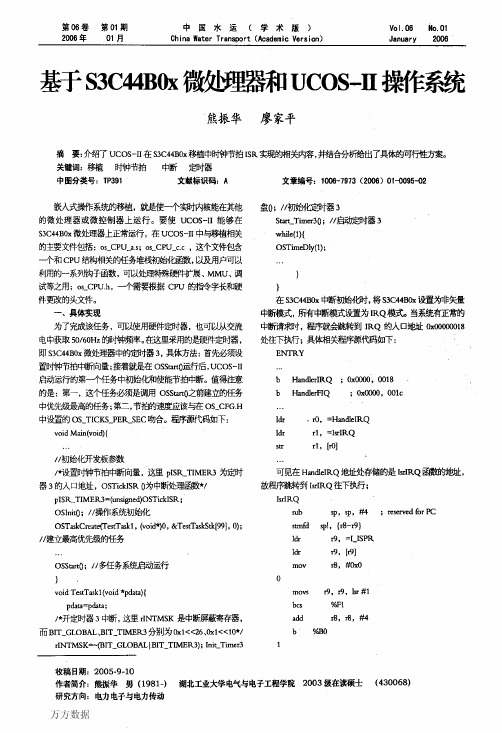
图 1 家居智能控制系统结构框 图
2 硬 件 2 1家居 智能控 制系统 的硬 件 .
系统 以S C 4 O 3 4 B X作为 中心控制芯片 。 3 4 B X S C4 O
【 摘 要】 为了提高家居的智能化水平, 设计了嵌入式家居控制系统。 该系统采用S C 4 O 3 4 B X芯片作为整个
智能化系统的控 制芯片 , C S I p O -I 作为整个 系统 的操作 系统 , 出了家居 智能化 系统的软硬件解 给 决方 案。
【 关键词 】 家居智能控制系统 S C 4 O 3 4B X芯片 p OS _ C 一l 实时操作系统
网络通信技术 、综合布线技术 ,将与家居生活有关 的 各种子 系统有机结合 ,从而进行统筹管理 ,使 家居生 活更加舒适 、安全 、有效 。 基于嵌入式 S C 4 O 3 4 B X设计的家居智能控制系统 包含如下子 系统 :
基于S3C44B0X嵌入式处理器的飞行控制计算机系统设计
基 于 S 4 O 3 4 B X嵌 入 式 处理 器 的 C 飞行 控 制 计算 机 系统 设 计
张
摘
悦 , 志杰 , 桂 于秀萍
( 尔滨工程大学 自动化 学院, 哈 黑龙 江 哈 尔滨 10 0 ) 50 1
要: 根据无人机飞行控制系统小 型化 、 耗 、 低功 实时性好 的要求 , 绍了一 种基于嵌入 式处理 器 SC4 O 介 3 4B X
和实时操作系统的飞行控制计算机的设计 方案 , 出了系统 的硬件结构和设计 要点 , 给 并就采用实 时操 作系统 的
控制软件 的任务 和运行 流程进行 了说 明. 该方案在保证系统性能同时 , 了系统规模 , 了系统可靠性 , 缩小 提高 简
化了软件设计 的复杂度 , 同类产 品的设计提供 了新 的思路. 为 关键词 : 无人机 ; 嵌入式处理器 ; 实时操作 系统 中图分类号 : 29 1 V4. 文献标识码 : A
a n w i e o e i n o i l rp o u t. e d a fr d sg fs a r d cs mi Ke wo d : V ;e e d d p o e s r T S;u / S一2 y r s UA mb d e r c s o ;R O C O
采集无人机的姿态数据 , 计算控制量并输 出到舵机
等执行机构, 接受地面站的指令并传输无人机的位 置等情报信息 ( 见图 1 . )
了系统 的硬件结构 , 并介绍 了基于 u / S一 C O 2实时
操 作 系统 的软件设 计 , 述 了软 件 的功 能划 分 和控 描
I 鳍 厨 厂 — — ]
作者简介 : 悦 (92 , , 张 18 一)男 硕士研究生 。 主要研究方向: 控制理论与控制工程 ,-a: agubhm t ao.n Em iz nyeaa u lh @yhoc.
第4章 第53节 基于S3C44B0X功能模块及应用开发介绍

3、S3C44B0X I/O端口应用编程
1)端口初始化
void port_init(void)
{
// CAUTION:Follow the configuration order for setting the ports.
号进入时,IRQ被暂停执行。
FIQ—快速中断请求
FIQ中断请求
Fast Interrupt Request 也叫FIQ异常,属于快速中断请求。 用于高速数据传输和通道处理 在ARM工作模式下,FIQ拥有充足的私用寄
存器。无需程序员在编程时考虑节省寄存器, 从而减小了任务切换时的开销。
S3C44BOX具有30个中断源,包括1个看门狗定时 器,6个定时器,6个UART,8个外部,4个DMA,2个 RTC,1个ADC,1个IIC和1个SIO共30个中断。
mGD
mGD mGD mGD
mGD
mGKA mGKB
辅单元ID 中断向量地址
sGKB sGA sGB sGC sGD sGKA sGKB ─ ─
0x0000 0074 0x0000 0080 0x0000 0084 0x0000 0088 0x0000 008C 0x0000 0090 0x0000 0094 0x0000 00A0 0x0000 00C0
handleEINT2就是相应中断处理函数的首地址
中断控制器为每一个中断源的中断向量地址生 成一条转移机器指令。例如,如果EINT0是 IRQ,则中断控制器产生一条转移指令,它从 0x18转移到0x20。这样,中断控制器就产生 一条0xEA000000的机器指令。用户程序代 码必须为转移指令确定转移地址,让每一个向 量地址上的转移指令转移到所对应的ISR(中 断服务子程序)。与向量地址相对应的转移机 器指令按照下面的方法计算:
基于S3C44B0步进电机的控制系统_毕业设计论文 精品

毕业设计说明书(论文)基于S3C44B0步进电机的控制系统序言当今世界,以计算机技术、芯片技术和软件技术为核心的数字化技术取得了迅猛发展,不仅广泛渗透到社会、经济、军事、交通、通信等相关行业,而且深入到家电、娱乐、艺术、社会文化等各个领域,掀起了一场数字化技术革命。
现代控制技术、多媒体技术与Internet的应用与普及,促使消费电子、计算机、通信一体化(3C)趋势步伐加快,嵌入式系统技术再度成为一个研究热点.嵌入式系统技术是将先进的计算机技术、半导体技术和电子技术和各个行业的具体应用相结合后的产物,这一点就决定了它必然是一个技术密集、资金密集、高度分散、不断创新的知识集成系统。
ARM (Advanced RISC Machines),是对一类微处理器的通称,还可以认为是一种技术的名字。
目前,采用ARM技术知识产权的微处理器,即我们通常所说的ARM微处理器,己遍及工业控制、消费类电子产品、通信系统、网络系统、无线系统等各类产品市场,基于ARM技术的微处理器应用约占据了32位RISC微处理器75%以上的市场份额,ARM技术正在逐步渗入到我们生活的各个方面。
随着人们生活水平的提高人们对智能产品的需求越来越高。
很多产品用8位机已经很难满足要求,同时技术的进步已经使32位系统不再高高在上。
32位微控制器的价格已经不比8位机高多少,有些系统使用32位机其整体成本甚至比用8 位机还要低。
这样使用32位系统就没有技术和成本的障碍了。
原先高高在上的32位嵌入式系统已经不再高贵,我们即将迎来32位应用普及的时代。
作为电类非计算机专业的本科生很有必要了解和掌握32位嵌入式应用的开发技术。
而目前在32位市场上ARM 占统治地位,因此为了适应社会发展的需求我们就很有必加入ARM嵌入式学习的环境中来了。
第1章绪论1.1课题背景嵌入式系统是以应用为中心,以计算机技术为基础,并且软硬件是可裁剪的,适用于对功能、可靠性、成本、体积、功耗等有严格要求的专用计算机系统。
基于ARM和μClinux的税控收款机的设计与实现.

基于ARM和μClinux的税控收款机的设计与实现税控收款机作为税收电子化的“咽喉要道”,是最重要的税收工具,它的推广和应用关系到国计民生,对于帮助国家税收征收和稽查具有决定性的意义。
我们研发的税控收款机在满足国标要求的前提下,采用“S3C44BOXCPU+μClinux"的方式来实现主要外设功能,降低了系统成本,具有较高的性价比和竞争优势。
本文首先研究了国内外税控收款机发展状况,指出目前市场上流行的税控收款机的不足,结合我国税控收款机的国家标准,对新研制的税控收款机进行了详细的需求分析,并对其系统平台(硬件平台和软件平台)、开发环境的建立进行了说明。
详细介绍了ARM处理器的优势,设计了基于S3C44BOX芯片的系统硬件平台。
其次对Bootloader进行了详细的研究设计,使其支持从SD卡加载系统镜像并启动系统。
在启动模式、中断处理、硬件初始化以及内存映射和最终引导μClinux内核等一系列关键技术上做了详细的分析。
最后对嵌入式μClinux内核进行了裁减和板级移植。
针对硬件平台对μClinux进行了修改,对μClinux内核的板级移植进行了详细的说明,对Clinux内核的配置、修改、编译、下载进行了研究。
同主题文章[1].魏建苗,李莹. 基于ARM微处理器和μClinux的税控收款机的设计与实现' [J]. 工业控制计算机. 2005.(01)[2].税控收款机明天会怎样' [J]. 电子商务世界. 2001.(07)[3].陈烨,李永清. 金融税控收款机系统中Modem的解决方案' [J]. 单片机与嵌入式系统应用. 2005.(07)[4].薛炎华. 发展我国税控收款机之我见' [J]. 市场与电脑. 1997.(10)[5].田小朋. 有关税控收款机国家标准起草背景' [J]. 信息技术与标准化. 2002.(11)[6].卜祥. 税控收款机国家标准实施' [J]. 标准计量与质量. 2003.(10)[7].税控收款机即将迎来新市场' [J]. 华南金融电脑. 2004.(01)[8].税控收款机相关标准' [J]. 信息技术与标准化. 2005.(Z1)[9].赵玮,龚建军,刘仁. 税控收款机的应用现状和发展' [J]. 甘肃科技纵横. 2004.(03)[10].钟东江. 京粤税控收款机的试点和推广' [J]. 信息与电脑. 2000.(10)【关键词相关文档搜索】:计算机应用技术; 税控收款机; ARM; μClinux; Bootloader【作者相关信息搜索】:中南大学;计算机应用技术;刘连浩;潘孝帮;。
83基于S3C44B0X嵌入式系统应用开发实例(中嵌教育嵌入式linux开发课件)(阅读)

三、Cache和片内SRAM 4路组相联统一的8KB指令/数据Cache; 未作为Cache使用的0/4/8 Kbytes Cache存 储空间可作为片内SRAM使用; Cache伪LRU(最近最少使用)的替换算法; 通过在主内存和缓冲区内容之间保持一致 的方式写内存; 具有四级深度的写缓冲; 当缓冲区出错时,请求数据填充。
第六章 基于S3C44B0X嵌入式系 统应用开发实例
6.1 S3C44B0X处理器介绍 6.2 S3C44B0X存储控制器功能及应用开发 6.3 S3C44B0X I/O端口功能及应用开发 6.5 S3C44B0X UART接口功能及应用开发 6.6 S3C44B0X中断控制器功能及应用开发 6.16 基于S3C44B0X的S3CEV40开发介绍
ARM7TDMI基础上增加8KB的Cache;
外部扩充存储器控制器(FP/EDO/SDRAM控制,片选 逻辑); LCD控制器(最大支持256色的DSTN),并带有1个 LCD专用DMA通道; 2个通用DMA通道/2个带外部请求管脚的DMA通道; 2个带有握手协议的UART,1个SIO;
1个多主的IIC总线控制器; 1个IIS总线控制器; 5个PWM定时器及1个内部定时器; 看门狗定时器; 71个通用可编程I/O口,8个外部中断源; 功耗控制模式:正常、低、休眠和停止; 8路10位ADC; 具有日历功能的RTC(实时时钟); 片上集成PLL时钟发生器。
十一、A/D转换
8通道多路ADC; 最大转换速率100KSPS/10位。
十二、LCD控制器
支持彩色/单色/灰度LCD; 支持单扫描和双扫描显示; 支持虚拟显示功能; 系统内存可作为显示内存; 专用DMA用于从系统内存中提取图像数据; 可编程屏幕大小; 灰度:16级; 彩色模式:256色) 5个16位带PWM的定时器,1个16位基于 DMA或基于中断的内部定时器; 可编程的工作周期、频率和极性; 死区(Dead-zone)产生器; 支持外部时钟源。
基于S3C44B0X的嵌入式广播发射机控制器设计

b a d a d s r e , t e n tit r c , ei , B p r , t .T i c nr l rc n n to l ce t c l it i d ma a e e u p n , o r n c e n e r e n ef e s ra US o t ec h a l hs o t l a o ny s in i al man an a n g q ime t oe i f y n
控制器设 计 , 利用 A M R 7微 处 理 器 的高 精 度 和高 可 作 为 主控 模块 , 结 合 丰 富 的外 围接 口模 块实 现 对 并
靠性来 监控发 射 机 工作 状 态 , 且实 现 了许 多新 的 发射 机 的有效 控制 。 并 功能 , 如掉 电回到掉 电前 的状态 , 时间组 自动开 关 1 1 硬件 的选 型 多 .
个 简单 的循 环处 理 的控 制流 程 , 自动化 功能 简单 ;
的基础 , 根据 发射 台的实 际情况 , 结合性 能 、 成本 、 可
此设计 完成 了基 于 ¥ C 4 O 3 4 B X的嵌人 式 广播 发射 机 靠 性等 因 素 , 制 器 采 用 了三 星 公 司 的 ¥C 4 O 控 3 4BX
1 8
基 于 ¥C4 O 3 4 B X的 嵌 入 式 广 播 发 射 机 控 制 器 设 计
◎罗小青 , 陈
( 南昌大学 , 江西 南昌艳 , 娜 娜 张30 2 ) 3 0 9
[ 关键 词] 广播发射机 ; 控制器 ;3 4 B X SC4 0
[ 摘 要] 文章 以 S C 4 O 3 4 B X为主控芯 片的 D M—A系列数字调幅发射 机微机控制器应 用于 IK D M 数字调制 中波 广播 A O W A
第2章基于ARM7TDMI的S3C44B0X嵌入式微处理器技术
本章重点 : ⑴ ⑵ ⑶ ⑷ ⑸ ⑹ S3C44B0X微处理器的组成; S3C44B0X系统管理的特点; S3C44B0X引脚信号含义; S3C44B0X特殊功能寄存器; ARM7TDMI核的组成; ARM7TDMI指令系统特点和编程模式。
2.1 S3C44B0X微处理器概述
⑵ 转换状态 使用ARM指令集的BX指令可以从ARM状态 转换到Thumb状态,使用Thumb指令集的BX 指令可以从Thumb状态转换到ARM状态。 无论处理器在ARM状态或Thumb状态,发 生了异常,进入异常处理程序处理器一定是在 ARM状态。如果一个异常在Thumb状态出现, 处理器要转换到ARM状态,异常处理完返回时 自动转换回Thumb状态。
S3C44B0X微处理器各引脚信号描述见表2.1。 (见参考书P23-25)
2.2.3 特殊功能寄存器简介 特殊功能寄存器(Special Function Registers,SFR),有时也称特殊寄存器或专用 寄存器。占用存储器地址空间为 0x01C00000~0x01FFFFFF,共4MB。这些寄存 器的含义和功能将在第4章以后的各章中分别介 绍,附录A列出了全部特殊功能寄存器的一个汇 总简表。
2.3 ARM7TDMI核
2.3.1 指令流水线、存储器访问和存储器接口 ⒈ 指令流水线 ARM7TDMI核使用了三级流水线结构,在通 常情况下,每条指令以取指、译码和执行三级, 通过流水线。 ⒉ 存储器访问和存储器接口 ARM7TDMI核采用冯诺依曼结构,使用单一 的32位数据总线传送指令和数据。只有装入、存 储和交换三种指令才能从存储器存取数据。
2.4.1 编程模式与处理器操作状态 ⒈ 编程模式 ARM7TDMI处理器核实现了ARM v4T结构, 包含32位ARM指令集和16位Thumb指令集。v4T 结构支持对芯片的调试,允许处理器响应调试请 求暂停;处理器内含有32*8位硬件乘法器;支持 嵌入式ICE硬件提供片上断点和调试点。
基于S3C44B0X和CS4334设计的音频文件播放系统

S3C44B0X是三星公司针对嵌入式系统推出高性价比微处理器,它是基于ARM7TDMI内核的16/32位RISC处理器,工作主频为66MHz.为了降低成本和节约产品开发周期,S3C44BO0X提供了丰富的内置部件,包括:内部SRAM,LCD控制器,8通道10位ADC,IIC总线接口,II S总线接口等.其中S3C44B0X IIS接口能用来连接一个外部8/16位立体声声音解码器.CS4334是CIRRUS公司推出的系列音频解码芯片.文献[1,2,3]中对它们的工作原理和应用有详细的论述.本文详细研究了S3C44B0X IIS总线接口和CS4334的连接,搭建了以二者为基础的嵌入式工作平台.在该平台上现WAVE音频文件的播放,并给出了测试程序.1IIS总线结构S3C44B0X IIS(Inter-IC Sound)接口对FIFO存取提供DMA传输模式代替中断模式,它可以同时发送数据和接收数据也可以只发或只收.如图1所示,总线接口FIFO控制包括总线接口、内部寄存器和状态机,控制总线接口逻辑和FIFO访问;3位的双分频器包括一个作为IIS 总线主设备时钟发生器,另外一个作为外部编码器的时钟发生器;主设备串行比特时钟发生器(主设备模式),将从主设备时钟中分频得到串行比特数时钟;声道发生器和状态器生成和控制IISCLK和IISLRCK,并且控制数据的接收和发送;16位移位寄存器在发送数据时将数据由并变串,接收数据时做相反的动作.IIS总线可以使用正常传输模式,DMA传输模式和发送接收同时模式三种传输方式.2 音频数模转换芯片CS4334CS4334是CIRRUS半导体公司生产的音频数模转换芯片,具有接口简单、性能稳定以及便于操作等特点,在嵌入式系统中有着广泛的应用.另外,由于WAVE数字音频经CS4334转换成模拟音频后信号较微弱,需要增加一个音频功率放大器.本文选用的是PHILIPS公司的TDA7050低电平单声道/立体声功率放大器.图1 IIS总线结构框图图2S3C44B0X与CS4334以及TDA7050的连接示意图3S3C44B0X和CS4334以及TDA7050的连接S3C44B0X IIS总线接口和CS4334模块都具有很强的通用性,连接很容易实现.连接方法为:将S3C44B0X的端口PF6(IISDO)、PF 8(IISCLK)、PF5(IISLRCK)、PE8(END/AN)分别与CS4334的管脚1、2、3、4连接.CS4334与TDA7050 连接时,只需将CS433 4的输出连接到TDA7050的相应输入管脚即可.具体连接方法如图2所示.4 程序设计程序设计假设S3C44B0X已经成功启动,此处着重介绍播放WAVE文件主函数:Playwave().IIS_Init( )是初始化IIS接口函数,BDMA0_Done( )是BDMA0中断处理函数.分别介绍如下.4.1 IIS接口初始化代码如下:void IIS_Init(void){rPCONF = 0x24900a; //设置I/O端口PF,使端口PF5~8工作在IIS状态Init_4334(); //初始化CS4334芯片4.2 播放WAVE音频文件函数Playwave()函数运行前会提示先将wave音频文件下载到指定RAM区域,函数计算出文件大小并提示播放与否,最后返回.void Playwave (U32 addr, U32 size){unsigned char *pWave;U32 samplesize; //WAVE文件长度U32 save_PLLCON;save_PLLCON = rPLLCON;rPLLCON= x69<<12)|(0x17<<4)|0;SerialChgBaud(115200);pISR_BDMA0=(unsigned)BDMA0_Done;rINTMSK=~(BIT_GLOBAL|BIT_BDMA0);//中断设置pWave=(unsigned char *)addr;//wave文件数据地址pWave+=0x28; //指向wav采样长度samplesize=*(pWave+0) | *(pWave+1)<<8 | *(pWave+2)<<16 | *(pWave+3)<<24;pWave+=4; //指向wav数据samplesize=(samplesize>>1)<<1;printf(nsample start:0x%x,pWave);printf(nsamplesize:0x%x,samplesize);Init_4334();/****** IIS 初始化******/rIISCON=0x22; //使能DMA,接收空闲,使能分频rIISMOD=0x89; //主模式,IIS格式,16位数据,256fs,32 fsrIISPSR=0x33; //分频因子rIISFCON=0xa00;//接收、发送DMA模式,使能FIFO/****** BDMA0 初始化******/rBDISRC0=(1<<30)+(1<<28)+(U32)pWave; //DMA源;16位数据,增长方式rBDIDES0=(1<<30)+(3<<28)+((U32)rIISFIF); //DMA目的:M2IO,内部模块rBDICNT0=(1<<30)+(1<<26)+(3<<22)+(1<<21)+(0<<20)+samplesize;rBDICNT0 |= (1<<20);//设置DMA请求源为IIS,中断方式,手动重载,使能DMArBDCON0 = 0x0<<2;printf(nNow play the wave file ...);printf(nPush any key to exit!!!);rIISCON |=0x1;while(!getkey()); //按下任意键返回}5 小结采用S3C44B0X内置IIS总线和音频数模转换芯片S3C44B0X,本文搭建了以二者为核心的工作平台,并详细讨论了基于此平台实现播放WAVE音频文件的方法.由于S3C44B0X及CS4334模块具有较强的通用性,因此本文给出的实现方法及程序具有使用简单、运行稳定、便于移植等特点.。
基于S3C44B0x微处理器和UCOS-II操作系统
本文链接:/Periodical_zgsy-xsb200601038.aspx
第∞卷
oSTickISR sTMfD
add
1dr
sn
叩!,{“>
;保存R4
r9,∽】 r9,I叩,粥】
sp!,{r8一r9,pc)
;保存讯Q模式的LR到uNIoAVE
LDR r4,=UNK。SAVE STR lrt【r4】
ldmfd
高端RAM区中断向量表如下:
HandleTIMER5#
HandkT工MER4群 HandleTIⅣ匝R3撑4
rINTMsK=~∞IT—GLoBALIBIT—TIMER3);IniLTimer3
1
b煳
收稿日期:200s-9—10
作者简介:熊振华男(1981一) 研究方向:电力电子与电力传动
湖北工业大学电气与电子工程学院2003缀在读硕士
(430068)
万 方数据
《中国水运》学术版
1dr r9,=HaIldkADC r9,19,r8
中图分类号:TP391
中断定时器
文献标识码:^
文章编号:10∞一7973(2∞6)0卜00%-02 盘O;/,初始化定时器3
starc
嵌入式操作系统的移植,就是使—个实时内核能在其他 的微处理器或微控制器上运行。要使ucos—II能够在 s3c4480x微处理器上正常运行,在ucos_II中与移植相关 的主要文件包括:。s—cPuJ s;oLcPu—c c,这个文件包含 一个和cPu结构相关的任务堆栈初始化函数,以及用户可以 利用的一系列钩子函数,可以处理特殊硬件扩展、MMu、调
IsrIRQ
oslnitO;//操作系统初始化
osTaskcrca饽frcstTaskl,(void★)0,8汀estlkksd【【99】,o);
基于S3C44B0X的智能家居终端控制系统的设计与实现

居控制器的硬件设计和软件设计. 结果表明, 系统简单可靠 , 该 易于扩展.
关键 词 : 智能 家居 ; 制 系统 ; 牙技 术 ;3 4 B X 控 蓝 SC4O
中囹分类 号 :T 7 M6
文 献标 识码 : A
文章 编号 : 0 7 2 8 ( 0 7 0 - 0 4 0 10 - 63 20 )3 0 8- 3
李 兰英 , 杨 晨
( 哈尔滨理 工大学 计算机科学与技术学院 , 黑龙江 哈尔滨 10 8 ) 5 0 0
摘
要 :针对 智 能 家居 系统 的 日益 增 长 需求及 嵌 入 式技 术 的 广 泛 应 用 , 分析 了智 能 家居 系统
的组成和 功 能 , 并提 出 了智 能 家居 控 制 系统的核 心部 分智 能 家居 控 制 器的 总体 架构 , 简要介 绍 了蓝 牙技 术 以及 蓝 牙通 讯协 议 . 出了一 种基 于三 星公 司的 ¥ C 4 O 芯 片和 蓝 牙通信 技 术 的 智 能 家 给 34B X
随着 E A技 术 的高速 发展 , 能家 居 的实 现也 D 智 得 到 了 更 好 的 解 决 . 系 统 采 用 三 星 公 司 的 本
收 徜 嗣相 : 06一l 20 1—1 6
¥C4 O 3 4 B X芯片 , 使用 u / S—I实 时操作系统 CO I 以及先进的蓝牙无线通信技术给出了智能家居的一 种合理的、 高性能的实现.
De i n a d I lme t t n o sg n mpe n a i fSma tHo o r me’ S T r ia n r l se B s d o 3 4 B X em n l Co t o Sy t m a e n S 4 O C
/ L nyn 3 a — i g, Y NG C e A hn
基于S3C44BOX微处理器的数字继电器设计

中图分类 号: T 8 M5
文献标识码 : B
文章编号: 10 .8 72 0 )30 6 .3 0 34 9 (0 70 .0 60
0 引 言
在 电力输送 及分 配过 程 中 ,电器 设备 各种 故 障 的保护 都离 不 开继 电器 的Байду номын сангаас用 。传统 的继 电器 主要 采 用机 电结 构 ,其 主要 构件 性 能较 差 ,因而性 能价 格 比相 对 较 低 。随 着 电子 技 术 与 计 算 机 技 术 的发 展 ,基 于不 同 型号微 控 制器 的数字 继 电器相 继 出现
( o g u nIsi t f e h oo y Zh n z o 5 0 7 Chn ) Zh n y a n tueo c n lg , e g h u4 0 0 , ia t T
A src: T eds n h u h f iilea ae nmi opo esr i R cr i usdi te ae.n e rjc b tat h ei o g t gt lybsd c .rcso t A M oeids se pra d nt o t gt o d ar o r wh S c nh p ih p e
基于S3C44B0X的嵌入式系统应用开发实例

•4、S3C44B0X支持的扫描模式 •4位单扫描 •4位双扫描 •8位单扫描
•
5、LCD控制寄存器
• S3C44B0X LCD处理器所包含的可编程控制寄存器共有18个
。
•
•6、LCD CONTROLLER SPECIAL REGISTERS(P371) •LCD Control 1 Register
•
•1
•2
•3 •4 •5
•
•MEMORY CONTROLLER SPECIAL REGISGERS
•1. BUS WIDTH & WAIT CONTROL REGISTER (BWSCON) • 实验P128、教材302 •2. BANK CONTROL REGISTER (BANKCONn: nGCS0nGCS5)
•If the F-bit of PSR (program status register) is set to 1, the CPU does not accept the FIQ.
•If I-bit of PSR is set to 1, the CPU does not accept the IRQ. •(2)中断模式Interrupt Mode(INTMOD)
•
•非矢量中断处理方式
• 非矢量中断处理模式是一种传统的中断处理方法。 • 当系统产生中断的时候,系统将interrupt pending寄存器中对 应中断的标志位置位,然后跳转到位于0x18处的统一中断处理函数 中,该中断函数通过读取interrupt pending寄存器来判断中断源, 并根据优先级关系再跳转到对应中断源的处理代码内。
屏,最大支持分辨率为1600*1600)
•2 通道UART,波特率可高达115200bps,并内置16Byte FIFO。
基于S3C44B0X仿人机器人控制系统的设计
基于S3C44B0X仿人机器人控制系统的设计翟流顺【摘要】目前,国内普遍采用单片机或DSP作为控制系统的微处理器来实现仿人机器人的控制.用单片机或DSP控制机器人时占用接口资源较多,所需外围元器件也较多,对整个系统的稳定性和可靠性有较大影响.因此,基于S3C44B0X微处理器设计了一个结构开放、模块化、实时性好的仿人机器人控制系统,把每一对左右对称的关节作为控制对象,这样,机器人的动作具有较好的协调性.然后,通过实验得到机器人各姿势下的参数,最终成功实现了仿人机器人的控制.结果表明,提出的设计方案是可行的,基于S3C44B0X的仿人机器人控制系统在速度、功耗、体积、可扩展性、稳定性方面有一定的优势,具有广阔的发展空间.【期刊名称】《佳木斯大学学报(自然科学版)》【年(卷),期】2010(028)004【总页数】3页(P524-526)【关键词】仿人机器人;S3C44B0X;机器人控制【作者】翟流顺【作者单位】临沧师范高等专科学校教育技术中心,云南,临沧,677000【正文语种】中文【中图分类】TP242.30 引言机器人学是一门迅速发展的综合性前沿学科.它涉及机械工程学、运动学、电子学、电气工程学、计算机、电子工程学、自动控制工程、人工智能、传感器、机器视觉、仿生学、模式识别与导航等多个学科,受到工业界和学术界的高度重视,是当今世界科学技术发展最活跃的领域之一[1].仿人机器人代表机器人研究领域最高研究成果,其最终研究目标是:研制出具备人类特征(如行走、感知、思维、判断等能力)而且在相当程度上代替并服务于人类,能够与人类和谐共处的高级智能机器人.从应用价值考虑,相对于其它机器人,仿人机器人在如下方面更有优势:首先,相对于移动机器人,双足行走的仿人机器人具有更灵活的行走能力,能够适应各种地形,可以方便地上下台阶,具有更强的越障能力,行动盲区少.因此,仿人机器人拥有更广阔的活动空间;其次,仿人机器人具有更高的智力水平.由于具备更强的感知、思维、判断能力,仿人机器人更能够适应未知环境并自主完成任务;再次,仿人机器人具有人的外形并具备良好的人机交互能力[2].因此,在服务、娱乐等领域仿人机器人有更明显的优势.1 嵌入式机器人控制系统的硬件设计1.1 FLASH闪存设计S3C44B0X对SST39VF160的读写虽然不需要专门的软件操作,但要使CPU对FLASH ROM进行正常操作,必须进行两个硬件方面的设置:大/小端和BANK0的总线宽度.S3C44B0X有一个输入引脚ENDIAN,处理器通过输入引脚的逻辑电平来定义它的大/小端,0为小端,1为大端.SST39VF160的逻辑地址被映射到S3C44B0X地址空间BANK0区域,它可以具有多种数据总线宽度,宽度值由引脚OM1和OM0决定,由于SST39VF160的存储单元组织形式为1M×16b,因此,应设置为 OM1=0,OM0=1[3](P385).1.2 UART 串口设计S3C44B0X除了具备 ARM7TDMI的内核以外,还集成了片上外设UART.这种设计大大减少了处理器以外的器件数量,降低电路的复杂程度,减少了成本和体积,因此降低了设计开发的难度和风险.PC12,PC13,PE1、PE2 是 S3C44B0X 的多功能I/O口,使用UART功能需要在寄存器PCONC和PCONE中对以上4个I/O口进行设置.根据设计需要,具体设置如下:PC12=0x11,PC13=0x11,PE1=0x10,PE2=0x10.1.3 舵机模块设计在机器人机电控制系统中,舵机控制效果是影响机器人性能的重要因素.标准的伺服马达有三条控制线,分别为:电源线,地线以及控制线.内部的直流马达及控制线路所需要的能源通过电源线与地线提供,电压通常为4~6V,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音),甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统电源供应必须合理.为使机器人上下肢灵活运动,本文选择的舵机主要参数如下:可控转角范围-90°~90°,控制脉宽范围 0.5 ~2.5 ms,周期 20 ms,最大扭矩/堵转扭矩0.01 kgm,最大速度/空载速度10 rad/s.舵机采用的驱动信号是脉冲宽度调制信号(PWM),即在20 ms的周期内,输入0.5~2.5 ms的脉冲信号,对应的转角范围为-90°~90°,转角与脉冲宽度基本成线性关系.1.4 PWM波形发生器PWM(脉宽调制)在电机的控制中应用十分广泛,S3C44B0X具有6个16位的定时器,其中定时器0,1,2,3,4 具有输出 PWM(脉宽调制)波形的功能[3](P455).由于这 5 个定时器已经全部集成在S3C44B0X芯片上,所以不需要在PWM输出上增加任何电路.定时器的时钟源由主时钟(MCLK)通过时钟分割器分割和除法器得到,定时器输入时钟频率=MCLK/(预分频值+1)/除法器的值.1.5 电源模块设计移动机器人自身装载电池,甩掉牵引电缆,这对提高机器人的性能,尤其改进移动性能是非常有益的.考虑到机器人的可移动性,选择可充电的电池作为电源.电池选择标准如下[4]:1)电池容量:电池容量应该足够提供整个机器人运动所需;2)电压大小:因舵机供电要求范围较宽,电池电压应该根据所选择的舵机型号而定;3)电池内阻:电池的内阻应该尽可能小,以减少功耗;4)充电重用率:为降低成本,充电电池可充电次数多;5)电池体积:为了减小整个系统体积,电池体积应尽可能小.整个系统的电源供电主要有2个部分:S3C44B0X逻辑控制电路供电和舵机供电.为了减少两个供电系统之间的噪音干扰,采用两组可充电电池组分别给逻辑控制电路和舵机供电.为了适应不同模块对电压的要求,采用三端正电压稳压器7805,输出的5 V电压给S3C44B0X及其外围接口电路、无线通信模块等供电.同时,由于舵机消耗电流较大,因此采用两个7806并联后输出的6 V电压给舵机供电,输出电流高达4 A,完全能满足本文控制系统多个舵机同时工作的要求.2 嵌入式机器人控制系统的软件设计软件设计主要是实现PWM信号输出以及字符收发.其中,字符收发子程序是为了将来能实现机器人远端控制,使机器人摆脱距离的限制而设计.2.1 PWM 模块硬件实现不需要编写程序,实现起来比较简单,精度也较高,不占用CPU时间.但是由于硬件端口有限,最多可以实现5路PWM信号输出.软件实现,需要编写控制程序,原则上一个定时器可以实现多路输出.缺点是PWM波形不够精确,占用大量CPU时间.软件实现的基本思想是:利用定时器实现一个时间段的定时,然后定义一个定时器中断,在一个循环结构程序中,来实现n个定时器时间段的I/O 口电平高低切换控制[5].2.2 串口通信模块程序实现串口通信有3个步骤,因此包含3个程序,分别是:(1)UART初始化子程序(2)字符发送子程序(3)字符接收子程序3 实验结果实验结果如表1所示.其中m0~m4为仿人机器人右侧关节(从下到上,分别为踝关节,小腿关节,大腿关节,肩关节,肘关节),m5~m9为相应的左侧关节.表1 仿人机器人各姿态下PWM信号参数(t/ms)m0 m1 m2 m3 m4 m5 m6 m7 m8 m9直立1.4 1.5 1.5 1.1 1.4 1.4 1.6 1.5 1.1 1.5前90° 1.4 0.6 1.5 1.1 1.4 1.4 2.5 1.5 1.1 1.5后90° 1.4 2.5 1.5 1.1 1.4 1.4 0.7 1.5 1.1 1.5手向地 1.4 1.5 2.4 1.1 1.4 1.4 1.6 0.5 1.1 1.5手仰天 1.4 1.5 0.6 1.1 1.4 1.4 1.6 2.5 1.1 1.5臂侧展1.4 1.5 1.52.0 1.4 1.4 1.6 1.5 2.0 1.5手90° 1.4 1.5 1.5 1.1 0.5 1.4 1.6 1.5 1.12.54 结论结果表明,本文提出的设计方案是可行的.基于S3C44B0X的仿人机器人控制系统在速度、体积、可扩展性、稳定性方面有一定的优势,具有广阔的发展空间.但是,在有外部干扰的情况下,系统的稳定性会受到影响,应当引起足够的重视.参考文献:[1]于秀丽,魏世民,廖启征.仿人机器人发展及其技术探索[J].机械工程学报,2009,45(3):71-75.[2]史晓敏.基于NiosII仿人机器人控制系统的设计[D].昆明:云南大学,2008.5.[3]田泽.嵌入式系统开发与应用[M].北京:北京航空航天大学出版社,2005.1:385.[4]黄魏炜,胡颖坚.基于S3C44B0X的移动机器人的设计[J].机电工程.2006,23(12).[5]李江乐.基于S3C44B0X的嵌入式地面小车机器人半自主控制系统的研究[D].昆明:云南大学,2008.5.。
基于S3C44B0X的机器人嵌入式控制系统

基于S3C44B0X的机器人嵌入式控制系统
武玉坤;张桂平
【期刊名称】《微计算机信息》
【年(卷),期】2008(024)026
【摘要】介绍了一个基于S3C44B0X处理器的机器人控制系统的硬件设计与实现,操作系统的移植,并对系统的实时性作了初步的分析测试.该系统性能好、功耗低、重量轻、实时性好,非常适合作为家用保安机器人的控制器.
【总页数】3页(P192-193,251)
【作者】武玉坤;张桂平
【作者单位】410076,长沙,长沙理工大学,计算机与通信工程学院;410076,长沙,长沙理工大学,计算机与通信工程学院
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于S3C44B0X的移动机器人设计 [J], 黄巍炜;胡莹坚;颜文俊
2.基于S3C44B0X与线阵CCD自主巡线机器人系统 [J], 刘溯奇;郝卫东;杨谋刚;林添成
3.基于S3C44B0X的移动机器人的应用研究 [J], 杨谋刚;郝卫东;刘溯奇;林添成
4.基于S3C44B0X的移动机器人的应用研究 [J], 杨谋刚;郝卫东;刘溯奇;林添成
5.基于S3C44B0X仿人机器人控制系统的设计 [J], 翟流顺
因版权原因,仅展示原文概要,查看原文内容请购买。
基于嵌入式S3C44B0X家庭智能电子助手系统的设计

基于嵌入式S3C44B0X家庭智能电子助手系统的设计
郭国法;孟彦京;张开生;张攀峰
【期刊名称】《现代电子技术》
【年(卷),期】2005(028)020
【摘要】介绍基于嵌入式S3C44B0X设计家庭智能电子助手系统的思路,对系统构成图和硬件模块做了简单的描述.
【总页数】2页(P114-115)
【作者】郭国法;孟彦京;张开生;张攀峰
【作者单位】陕西科技大学,电气与电子工程学院,陕西,咸阳,712081;陕西科技大学,电气与电子工程学院,陕西,咸阳,712081;陕西科技大学,电气与电子工程学院,陕西,咸阳,712081;陕西科技大学,电气与电子工程学院,陕西,咸阳,712081
【正文语种】中文
【中图分类】TS734+.7
【相关文献】
1.基于S3C44B0X的嵌入式电子收款机设计 [J], 刘允利;刘娜
2.基于S3C44B0X嵌入式系统的变电所网络监控系统设计 [J], 刘晓艳;吴永祥;孙全才
3.基于S3C44B0X的智能家居嵌入式系统 [J], 李世红;刘刚;蔡志端
4.基于嵌入式S3C44B0X家用抄表智能系统的设计 [J], 郭国法;孟彦京;张开生
5.基于嵌入式S3 C44B0X的家庭智能电子助手系统的设计 [J], 张开生;郭国法;张攀峰
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
访问发送缓冲器 $ 如果缓冲器释放 %!"# 可以向发送 缓冲器写报文 & 首先发帧信息字节 % 然后发报文的 $ 字节 %& % 接着发 ’ 字节的数据 % 最后发 ’ 发送 ( 命令 % 完 成一帧数据的发送 &
700110A 辽 宁 沈 阳 南 塔 街 00I 号 沈 阳 自 动 化 研 究 所 第五研究室 6 张延宇
b 投稿日期 U(994OcO-(d b 修稿日期U(99e.fO-2g
b 接第 -(3 页g
!"# SJA1000 4 ID Y N N Y Y N 8
的读取速度快等特点来运行程序’ 即我们俗称的内 存 ’ 几乎所有的嵌入式系统包括 5* 机都遵循这一特 点 ’ 即把程序加载到 (OJIK 中运行 & 如采用 WK 字节 的 (OJIK XYRNZL+"L%-X[ & 图 " 为税控收款机硬件 系统框图 &
两个 J(%)% 串口 以太网
"# 卡读写器
待状态控制寄存器
T >2E H573Z [!\]! T Q)/- ?756IAD 4S2C? %#%%%%^IX% T !63U823% I22E C21 M_‘a%’% X$^U >2C@A65B TR-685 G$P -825 G$P -688 G’P -28BG$P -86BG$ 4S2C? %#%%%%$a%% T !63U823$ 网 口 控 制 芯 片 $VI7ER -685G%P -825G’P -688G$’P -28BG%P -86BG% 4S2C? %#%%%%$a%% T !63U823^ 权限锁 >\) 4S2C? %#%%%%$a%% T !63U823M >63?@A65B R -685G%P -825G’P -688G$’P -28BG%P -86BG% R 4S2C? %#%%%%$a%% T !63U823’ 键 盘 数 据 口 -685G%P -825G’P -688G$’P -28BG%P -86BG% 4S2C? %#%%%%$a%% T !63U823X OI7E 外 接 数 据 口 R -685G%P -825G’P -688G$’P -28BG%P -86BG% 4S2C? %#%%%$O%%O T !63U823V J.*)+P -C! 8?G^8A28U5P 82AH13 6??C OLI7E 4S2C? %#%%%%$a%% T !63U823, 液晶以及 $V<XX’# 扩展串口 ’ TR -685G%P -825G’P -688G$’P -28BG%P -86BG% 4S2C? %#%%O%%XaD T *Y@*YJF $X4VH5 4S2C? %#%%%%%%%% T !63U V\, 57bDR M^+\M^\O+ 4S2C? %#%%%%%%^% T +*J*!V <)J A6ED38c G ^8A28U5 4S2C? %#%%%%%%^% T +*J*!, <)J A6ED38c G ^8A28U5 在 3d<J3 有效之前地址建立时间 T-685 在 3=Y 上芯片选择建立时间 T-825 存取周期 T-688 在 3=Y 上芯片选择保持时间 T-28B 在 3d<J3 有效地址保持时间 T-86B T-C8? *)J 到 <)J 延时 c >H8ADH5 下的 !Je 驱动 !Je 驱动部分可以分为两大部分 ! 一是直接操作 外设的驱动 " 包括串口打印机驱动 "aA65B 驱动 "AD? 驱 动 "‘a? 驱动等几部分 " 这些驱动跟 ’’!%0 内部寄存器 没有直接关 系 ( 另外一大 类驱动 则 是 直 接 配 置 ’’!% 内部寄存器的 驱动 " 包括设 置 ZW72 " 配置中断 寄存器 " CE8 时钟读写 "E71DC 的设置 "H6CE 的配置等等 % 另外键盘 的扫描也是直接操作 ’’!%0 内部寄存器实现的 % 所有 这些驱动均用 8 语言编写 %
,-./012/3 893 :;;2<1:=<>? :@3: >A 3BC3DD3D 4E4=3B <4 B>@3 :?D B>@3 :C@>:DF=9<4 ;:;3@ <?=@>D013 =93 1>?4=<=0=<?G :?D =93 D34<G? >A 4>A=H:@3 :?D 9:@DH:@3 >A A<41:2 1:49 @3G<4=3@ 4E4=3B C:43D >? ()*++,-. B<1@>;@>1344>@ :?D /02304 567( >;3@:=<>? 4E4=3BF 4567809.3 5:-59959 .6./5:; !<=$$%>’ :?208@0825..80; A?.21B 21.C 05D?./50 .6./5:
使用了一条跳转指令_
"%W 360 元 / 年 邮局订阅号 #82-946 !!!
《 ($) 技术应用 *+, 例》
ARM 开 发 与 应 用
! "#$%""
其作用是在系统上电复位或者手动复位后系统 程序指针跳到 " 地址执行时" 系统将程序跳转到 "#&%%% 即 ’( 地址的地方继续执行 #’( 地址烧入监控 程序 $%
技 术 创 新
! 软件设计
应用软件的设计体现在税控收款机两大主要功 能的实现上 " 即商业功能和税控功能 % 商 业功能包括 模式管理 & 权限管理 &e][ 管理 & 项目管理 & 收款 管理 & 各种报 表管理 功 能 "这 里 不 作 详 细 介 绍 (税 控 功 能 主 要有如下几个方面 ! 初始化操作 : 见第 O 页 ;
/>@S2:49 )QUA-+- $((8 公 司 %’)%K 的 /:?DS2:49 VQARL-W-C $(:B40?G 公司 %& JIK 存储器主要是利用它
贺安坤 #硕士
()*++,\. 把复位信号也作为中断来处理 ’ 系统 复 位 时 程 序 $;1 % 指 针 被 置 成 - ’ 使 程 序 跳 到 -^-------- 开始运行 & 在 C>>=#4 文件的开始 $- 地址 %
N 硬件设计
%#" 硬件组成
税控收款机硬件除 ()*++,-. 微处理器外 ’ 还主 要包括主存储器 )JIK 存储器 ) 打印机 ) 显示屏 ) 键盘 ) 及其它的通信设备等 & 主存储器主要是指 S2:49 存储 器 ’ 又 分 为 /:?DS2:49 和 />@S2:49 ’ 如 采 用 R"%T 的
!"# 中国石油大学 $ 北京 % 计算机系 $ %# 山东农业大学信息学院 &
贺安坤
"’%
陈明
"
郝红旗
"
He ,Ankun Chen ,Ming Hao ,hongqi
摘要 # 嵌 入 式 系 统 的 应 用 领 域 越 来 越 广 泛 & 文 章 以 ()*++,-. 微 处 理 器 及 /012304 567( 操 作 系 统 为 核 心 ’ 介 绍 了 税 控 收 款 机 系统的组成及软硬件设计& 关键词 # 嵌入式系统 (!"#$$%&’ 微处理器 ( 税控收款机 文献标识码 #, 中图分类号 #()&*+
/\JS6I(X
(OJIK
*57]++,-‘
/I/OS6I(X
嵌 入 式 结 构 基 本 部 分
键盘 图"
$#%
系统硬件组成框图
&’%
%#% 底层驱动的设计
底 层 驱 动 包 含 三 部 分 内 容 #,\\8 向 量 表 部 分 ’ ()*++,-. 监 控 程 序 部 分 及 税 控 机 在 /012304 下 的 ,(5& ,\\8 向量表 因系统选用的是 /012304 操作系统 ’ 对 ()*++,-. 的中断是向量模式 & 所以在 C>>=#4] 汇编语言编写 &文件 中主要是设置向量表的跳转地址 & 表 " 为 IJKN8OKP 的异常向量表 &Biblioteka 技 术 创 新P 引言
税控收款机是指具有特定税控功能的电子收款 机& 所谓特定税控功能是指能够保证数据的正确生 成 ) 可靠存储 ) 安全传输 ’ 并可实现税务管理和稽查等 功能 & 税控收款机系统设计一般采用目前流行的嵌入 式系统结构 & 硬件设计考虑高性价比和高可靠性 ’ 软 件设计上 ’ 考虑系统的稳定性 ) 实时性和可靠性 & 根据 这一原则税控收款机系统开发可选取 IJK 体系结构 的主芯片 ()*++,-. 微处理器及高性能微内核的实时 操作系统 $/012304 567( %& (:B40?G ()*++,-. 微处理 器是三星公司为手持设备和一般应用提供的高性价 比和高性 能的微控制 器解决方 案 ’ 其 *57 核 采 用 的 IJK 公司 "LM)% 位 IJKN8OKP JP(* 结构 ’()*++,-. 通 过在 IJKN8OKP 内容基 础上扩展一 系 列 的 通 用 外 围器件’使 系统费 用 降 至 最 低 ’消 除 了 增 加 附 加 配 置 的需要 & /012304 567( 是为实时嵌入 式应用而 设 计 的一个抢先式多任务操作系统内核 ’ 其 QR! 的代码是 用 I/(P * 写成的 ’ 因此非常便于移植并能够支持大 多数类型的处理器 & 以下就税控收款机系统软硬件开 发的关键技术加以论述 &